Shape Optimization of the Momentum Ring Cross Section for Satellite Attitude Control Based on Magnetohydrodynamics
Youlin Gu, Qinghua Liang, Shigang Wang, Anlei Zhou, and Chaozhen Liu
1School of Mechanical Engineering, Shanghai Jiao Tong University, Shanghai 200240, China
13007748 @163.com, *qhliang@sjtu.edu.cn
2Shanghai Key Laboratory of Aerospace Intelligent Control Technology, Shanghai Aerospace Control Technology Institute, Shanghai 201109, China
Submitted On: November 15, 2021; Accepted On: April 7, 2022
Abstract
Compared with the traditional actuator, the fluid momentum controller actuator based on magnetohydrodynamics (MHD) has some unique advantages and characteristics. In this paper, a method is proposed for the shape optimization of fluid momentum ring cross section. Based on the engineering situation, this article proposes a mathematical model of angular momentum that can be used for analytical calculations. Second, the two shapes obtained are unified and mathematically expressed in terms of maximum power and minimum resistance, respectively. Finally, the particle swarm algorithm is used to optimize the parameters of the proposed shape in combination with finite element method (FEM). Compared with the common rectangular section scheme, the attitude adjustment performance of fluid momentum ring can be effectively improved. Specifically, for the same area of cross section, the fluid momentum rings with the proposed shape provide the angular momentum values that exceed those of the rectangular shape by 14%-17% for the cases considered. This method avoids the huge computation of computational fluid dynamics and multidisciplinary topology optimization.
Keywords: shape optimization, cross section, magnetohydrodynamics (MHD), satellite attitude.
I. INTRODUCTION
Attitude control of satellites is an important part of performing space missions. There are several implementations of satellite attitude control, among which the fluid momentum ring possesses some unique advantages. The magnetohydrodynamics (MHD) based fluid momentum ring without bearings and moving rigid bodies has good research prospects. In 1988, NASA proposed a patent [1], explaining the concept and functioning of the fluidic momentum controller (FMC). This paper discusses the MHD-based fluid momentum ring, driven by electromagnetic forces. The related study involves the problem of coupled electromagnetic fluid multi-physical fields, and the related calculations are more complicated. There have been many studies [2–6] on fluid momentum rings based on MHD in the past decades. The fluid momentum ring adjusts the attitude of the satellite following the conservation of angular momentum, as shown in Figure 1. The fluid in the fluid cavity is subjected to an electromagnetic torque that changes the flow velocity, while the satellite body is subjected to a reaction torque. Different fractional models are estimated of unsteady MHD flow by Talha Anwar, and the solutions of velocity and energy are reached by a series of algorithms [7–11].
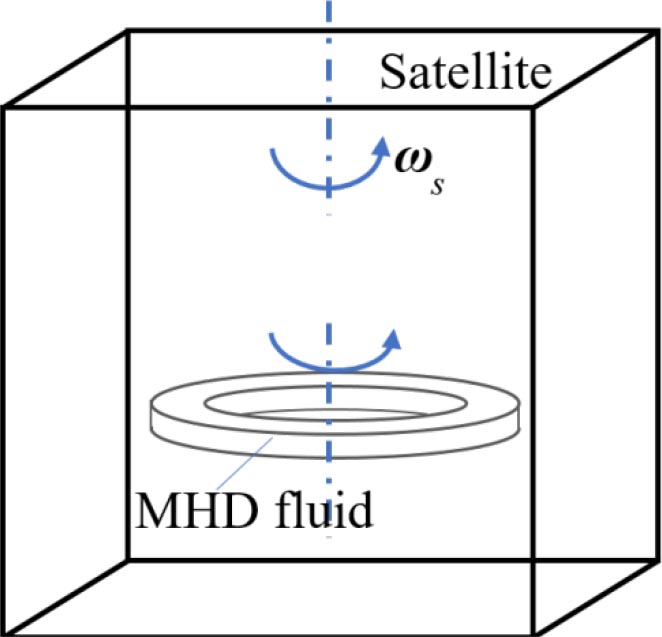
Figure 1: Conservation of angular momentum between the fluid ring and the satellite.
In the existing studies, the pipe cross section is circular or rectangular. Through analysis and comparison, the rectangular section is conducive to maximize electromagnetic force, while the circular section is conducive to minimize hydraulic resistance. In 2007 [12], MHD transient flows in rectangular cross-sectional channel is analyzed. Different cross-sectional aspect ratios of rectangular shape are discussed [13]. For satellite attitude actuators, efficiency and weight are sensitive, and the rectangular cross section is clearly not the optimal solution. The shape optimization of the momentum ring cross section based MHD represents a challenging computational problem because optimization program needs to call MHD multiple physical field solutions including computational fluid dynamics (CFD) for many times, which brings a huge amount of computation. In addition, common shape optimization treatments need to deal with the problem of boundary interpolation and the transition problem of different boundary conditions.
Based on the optimization theory and the study of FMC based on MHD, this paper presents a unified equation for circles and rectangles to describe the shape of pipe interface. At the same time, a simplified MHD analytical model suitable for a fluid momentum ring is proposed. These works make the pipe section shape and the input electromagnetic field parameterized and establish a relationship with the angular momentum of a fluid momentum ring, an important satellite attitude adjustment parameter. Finally, an effective and fast framework for the shape optimization design of the fluid momentum rings is proposed. This method enables the implementation of the shape optimization of the cross section of the FMC based on MHD, allowing the actuator’s attitude adjustment performance to be improved.
II. PHYSICAL MODEL
A. Satellite control principle
The attitude control principle of FMC based on MHD is the same as that of the flywheel. When the satellite is in space, it will inevitably be subjected to the torque of external disturbance , which will produce an angular velocity . Suppose the angular momentum of the fluid in FMC is and the angular momentum of the satellite (excluding the fluid ring) is . It can be expressed as the following formulas:
| (1) |
Considering only the single-axis problem here, we have
| (2) |
| (3) |
where is the unit vector, and .
If you require the satellite stable attitude, that is, after the above integral there
| (4) |
where is the initial angular momentum of the fluid ring. Thus, the maximum angular momentum of a fluid ring indicates its ability to absorb externaltorques.
According to the theory of electromagnetism, the current perpendicular to the magnetic field will be affected by the Lorenzo force, and FMC based on MHD is driven based on this basic principle. The vector product of flux density B and current density determines the force acting on the liquid metal volume element:
| (5) |
In this work, the electromagnetic drive structure is shown in Figure 2. The magnetic field is generated by permanent magnets (PMs), the power supply is controlled by current, and the electric and magnetic fields are perpendicular to each other.
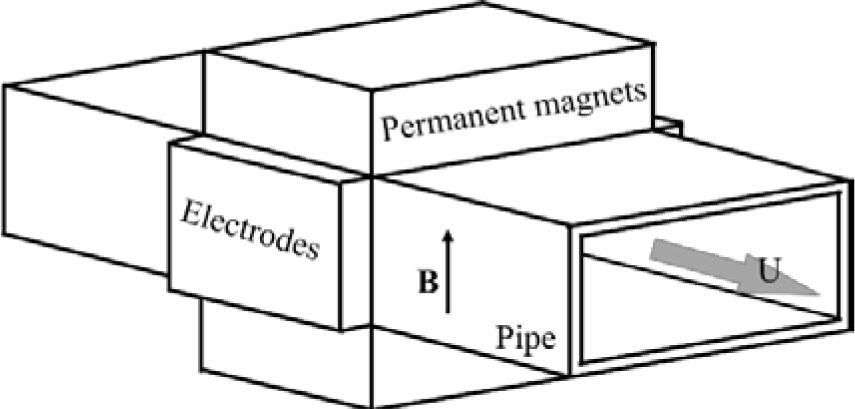
Figure 2: Schematic diagram of electromagnetic drive.
For a steady flow body, there is
| (6) |
where is the density of the fluid, is the velocity vector, is the electromagnetic force, is the kinematic viscosity of fluid material, and is the inner pressure. The cross section of the pipe is uniform and the shape deformation is not considered. The mechanical equations are established using the mechanical equilibrium of the fluid at steady state. The following principal assumptions are considered:
(1) The external magnetic field is a uniform static field, and the induced magnetic field is neglected.
(2) The electrodes are excellent conductors, and the single electrode is equipotential.
(3) The flow is unidirectional and one-dimensional.
According to engineering fluid dynamics, the friction loss in a continuous pipe is followed
| (7) |
where is the area of the cross section of the pipe, and reflects the pressure loss when flowing along a pipe with equal cross section
| (8) |
| (9) |
In eqn (8), is the hydraulic diameter of the liquid in the pipe, is the coefficient of friction, and is the length of the flow. Calculations confirm that the actual flow state is laminar. In eqn (9), is the Reynolds number. The angular momentum of FMC is a very important parameter, which reflects its attitude adjustment ability. It may be emphasized here that the cross section of the pipe is the same everywhere, and the whole pipe is circular with radius R, as shown in Figure 3. According to the definition of angular volume, the angular momentum in this annular pipe is as follows:
| (10) |
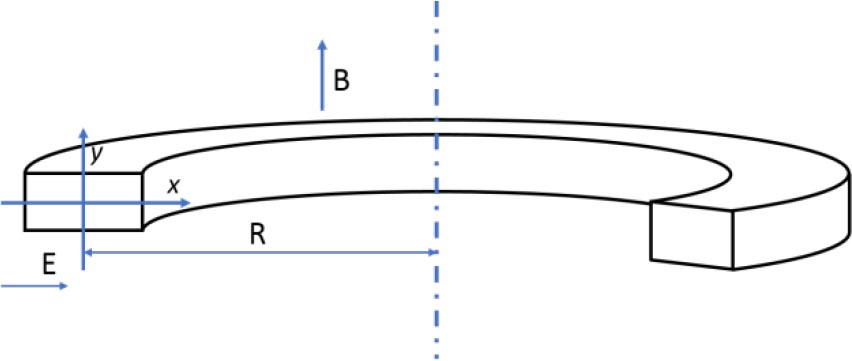
Figure 3: FMC with rectangular cross section.
B. The proposed model
In order to obtain a suitable analytical model, the flow field is simplified here. This enables the electromagnetic force to be brought into the fluid momentum equation, and then the angular momentum analytical expression of the FMC can be obtained. For a closed pipe loop, when the flow is steady, the power and resistance are in balance, . From the previous equation related to pipeline losses, it further follows that
| (11) |
where is the circumference of the pipe cross section. Here, the average flow velocity is used instead of the three-dimensional flow field. It should be noted that such an approximation requires . Otherwise, the difference in flow velocity between the inside and outside will be difficult to ignore. Inserting these equations, the angular momentum is as follows:
| (12) |
It can be seen that the maximum angular quantity of the fluid is positively correlated with , when the confined volume () and the loop radius are considered. According to eqn (6), the electromagnetic force is proportional to the length of the current flowing through it. It is obvious that rectangle is the topological solution of the optimal problem of under the constraint of pipe size. For the optimal problem of , we can know from the basic geometry that the circle is the solution of this problem.
III. METHODS
A. The proposed shape scheme
According to the above study and analysis, it is known that the electromagnetic driving force depends mainly on the width of the cross section of the pipe for the same magnetic field strength and current size. Further, it is known that the driving force is maximum when the pipe shape is rectangular. From the perspective of the engineering fluid dynamics, the flow loss of the pipe depends on the hydraulic diameter of the pipe for the same flow rate and cross-sectional size. When the pipe shape is circular, the flow resistance of the pipe is the smallest. Here, the optimal problem for H is regarded as a multi-objective optimization problem of the optimal problem of with and . Thus, this paper proposes a new cross-sectional shape which is intermediate between circular and rectangular and can be regarded as a weighted combination of the two, as shown in Figure 4. The equation is as follows:
| (13) |
where and are the positive lengths in the x-axis and y-axis directions, respectively. is similar to a weighted value, as shown in Figure 5. When =0, the shape is elliptical, whereas when =1, the shape is rectangular.
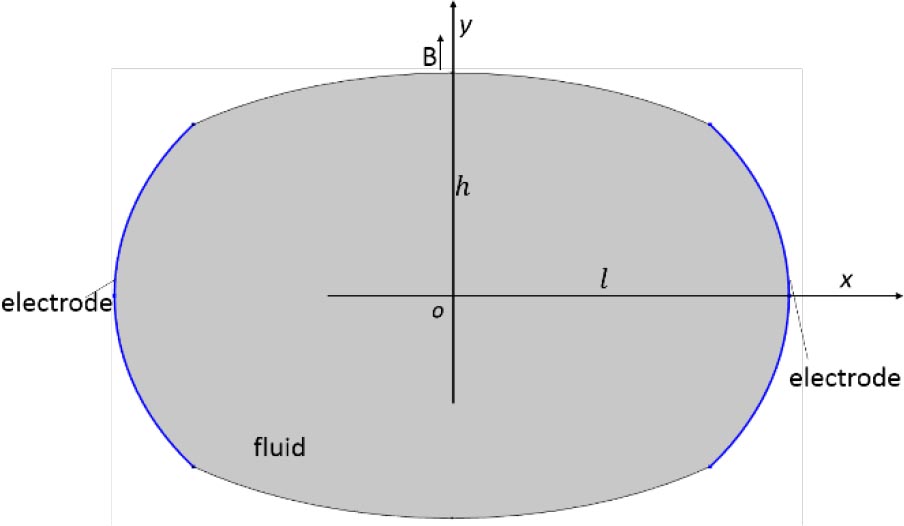
Figure 4: The proposed shape combining circle and rectangle ( = 0.3).
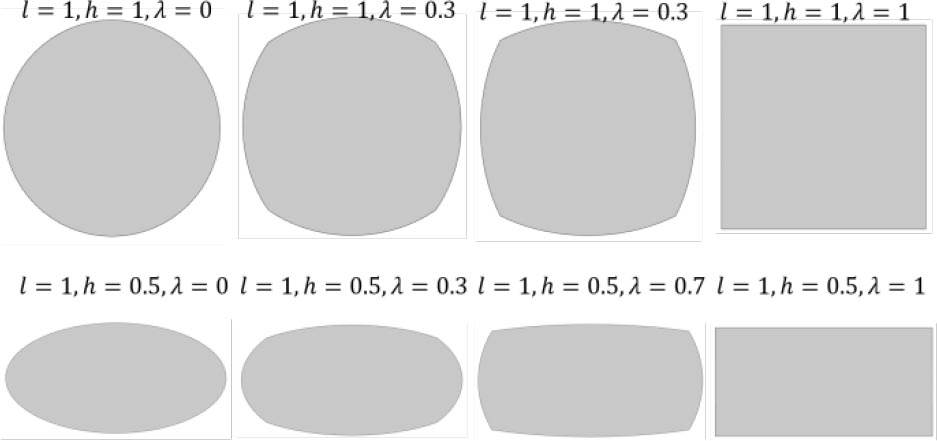
Figure 5: The various cross-sectional shapes.
Using calculus, the analytic equation for the area of the proposed shape can be obtained as follows:
| (14) |
Unfortunately, similar to the ellipse, there is no analytic expression for the perimeter of the proposed shape. The value of the perimeter can be calculated numerically with the help of finite element method (FEM).
B. Optimization problems
This section illustrates the method with a case study. Here, a background magnetic field with a fixed intensity of 0.1 T and a current DC source of 10 A are used. The fluid material is liquid metal gallium. The kinematic viscosity of gallium is 3.49 10m/s at 303 K. Taking into account the size of the magnetic field area and the practical environment, the relevant design dimension parameters are shown in Table 1.
Table 1: The design space and initial value
| Design parameters | L(m) | h(m) | (m) |
|---|---|---|---|
| Lower bound | 0.001 | 0.001 | 0 |
| Initial values | 0.03 | 0.01 | 0.5 |
| Upper bound | 0.05 | 0.05 | 1 |
Overall, the design optimization problem can be expressed as
| (15) |
The complex shape optimization problem of MHD background is simplified to the optimization problem of three-dimensional design variables, which is to be solved by the original particle swarm optimization (PSO).
The process of the shape optimization using the proposed shape equation is summarized as follows.
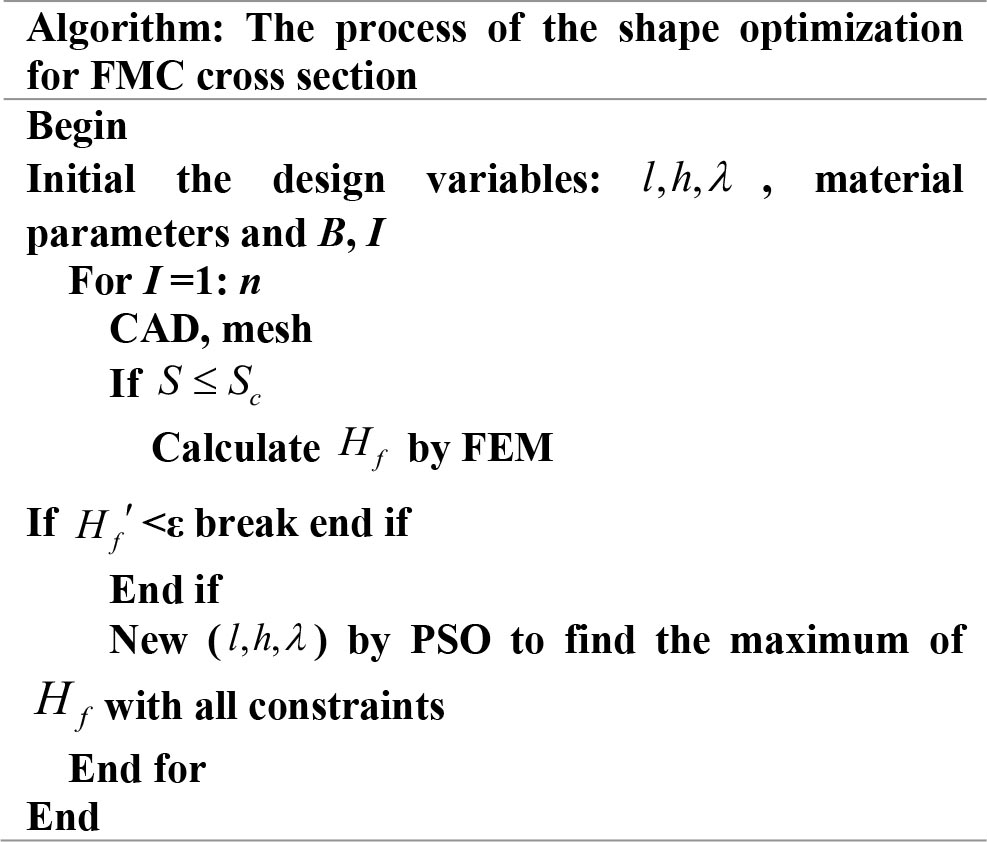
IV. RESULTS AND DISCUSSIONS
The above optimization model is solved by PSO and FEM. PSO is a population-based algorithm and is widely used in the optimization of multivariable problems. A population of particles called a swarm is moved toward a maximum of an objective function.
To demonstrate the advantages of the proposed shape scheme, rectangular section scheme is also calculated as a comparative study. The constraints of geometric and physical parameters are shown in Table 2.
Table 2: Constraints of geometric and physical parameters
| Property | Value | Unit |
|---|---|---|
| 0.05 | m | |
| 0.05 | m | |
| 0.005 | m | |
| 0.006 | m |
In this study, the FEM analysis of electromagnetic fields is carried out using COMSOL. The PSO is programmed in MATLAB R2019b. The number of particles is 36 and the residual tolerance is set to be 10. The optimization program was performed on a computer with a 3.6 GHz Intel 9700 CPU and 32 GB of memory.
Figure 6(a) shows the simulation results for a general rectangular cross section with the calculated angular momentum of 6.3 10Nms, 6.68 10Nms. Figure 6(b) shows the optimized potential with the calculated angular momentum of 5.5 10Nms and 5.8 10Nms.
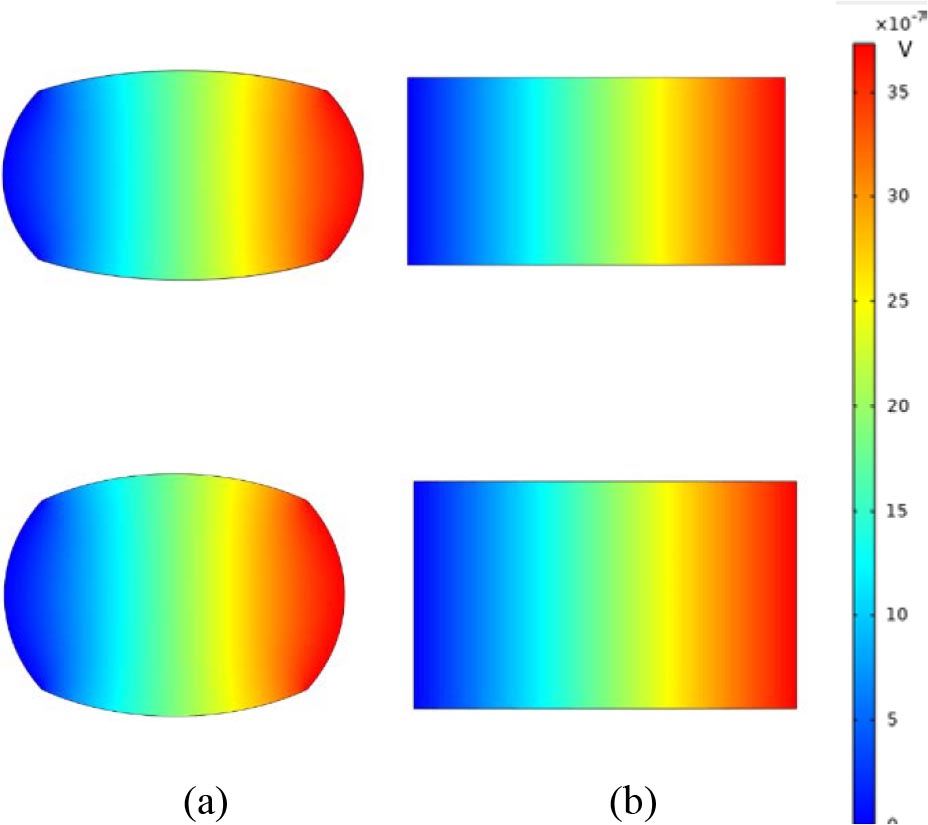
Figure 6: Potential diagram. (a) The proposed shape. (b) The rectangular shape.
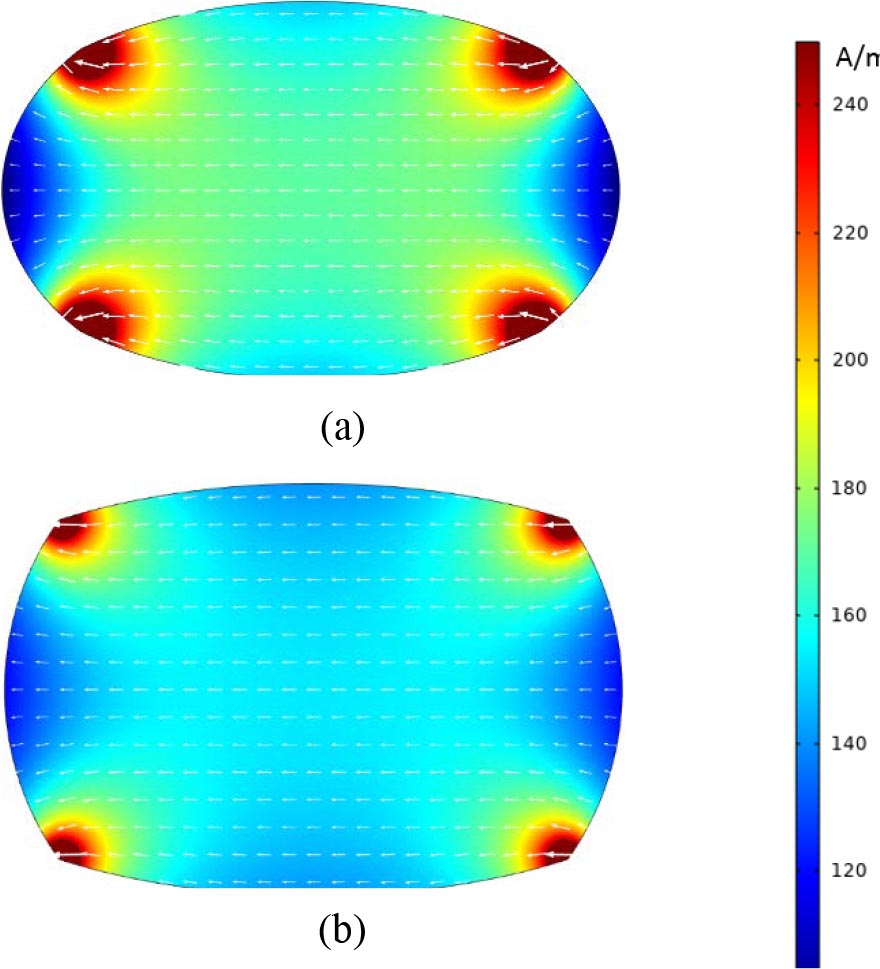
Figure 7: Current density diagram (the direction of the arrow indicates the direction of the current, and the length of the arrow responds to the size of the current density).
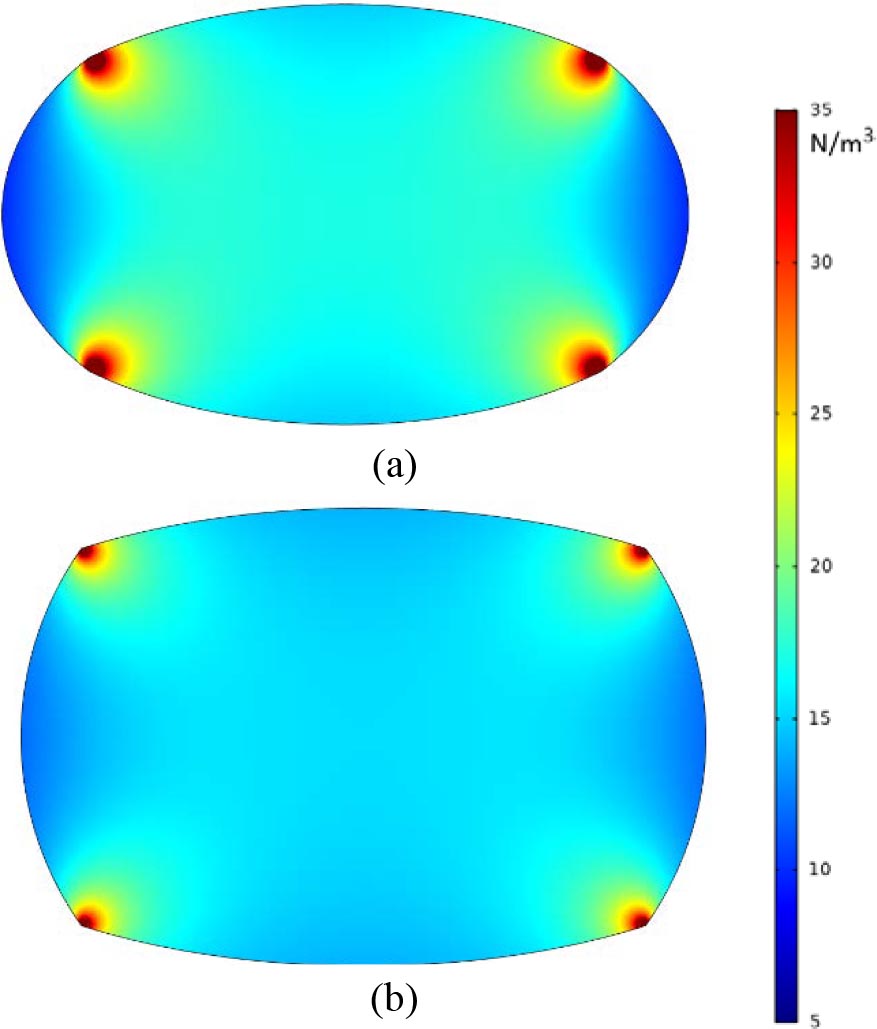
Figure 8: Electromagnetic force density diagram.
Figure 7 shows the optimized current path and current density. As shown in the figure, the current is more concentrated in the four corner regions. The closer is to 1, the more uniform the current distribution is. Figure 8 shows the electromagnetic force density distribution under the action of an ideal vertical magnetic field. The same concentration phenomenon exists in the four corners. Note that the electromagnetic force in the central region is greater than that near the boundary.
After this optimization method, the performance of FMC can be improved obviously. Table 3 shows comparisons between the rectangular shape and the proposed shape in the terms of angular momentum, and the enhancement is obvious.
Compared with the general shape optimization, it has lower computational cost and does not need spline interpolation.
Table 3: The angular momentum values calculated by FEM of the proposed shape and rectangular shape
(m) |
Size (m) |
(mN* m*s) |
||
| Rec-shape | 0.05 | 0.05,0.025 | 5.5 | |
| 0.06 | 0.05,0.0297 | 5.8 | ||
| Opt-shape | 0.05 | 0.05,0.0306, 0.204 | 6.3 | 14.5% |
| 0.06 | 0.05,0.0334, 0.525 | 6.8 | 17.2% |
V. CONCLUSION
In this work, we introduced a shape optimization method for the cross section of FMC, where we seek a balance between the shape for maximum electromagnetic force and the shape for minimum hydraulic resistance, such that the angular momentum is maximized. The proposed method can provide an optimized cross section for FMC quickly and efficiently. Compared with the common rectangular cross-sectional scheme, the attitude adjustment performance of FMC is obviously improved. The optimized shape is smooth and continuous and makes the follow-up design work easier.
(1) The article proposes a unified analytical equation that can both describe rectangular, elliptical, and its transition shapes simultaneously.
(2) Further, a shape optimization framework is developed. Its effectiveness is illustrated by an example, which significantly improves the attitude adjustment performance of FMC.
(3) In addition, the simplified calculation of the flow field of FMC avoids the complexity of CFD and makes the whole multidisciplinary optimization practically operable.
ACKNOWLEDGMENT
This work is supported by the National Natural Science Foundation of China under Grant 51875338.
REFERENCES
[1] R. S. Maynard, “Fluidic momentum controller: U.S. Patent 4,” vol. 776, no. 541[P]. 11-10-1988.
[2] A. Kelly, C. McChesney, P. Smith, et al., “A performance test of a fluidic momentum controller in three axes.” Final Report ASE Q, pp. 463, 2004.
[3] R. Varatharajoo, R. Kahle, and S. Fasoulas, “ Approach for combining spacecraft attitude and thermal control systems.” Journal of spacecraft and rockets, vol. 40, no. 5, pp. 657-664, 2003.
[4] R. Varatharajoo, R. Ajir, and T. Ahmad, “Hybrid spacecraft attitude control system.” The International Journal of Multiphysics, vol. 1, no. 2, 2016.
[5] Y. Ji, X. Li, T. Wu, et al., “Quantitative Analysis Method of Error Sources in Magnetohydrodynamic Angular Rate Sensor for Structure Optimization.” IEEE Sensors Journal, vol. 16, no. 11, pp. 4345-4353, 2016.
[6] K. D. Kumar, “Satellite attitude stabilization using fluid rings.” Acta Mechanica, vol. 208, no. 1-2, pp. 117-131, 2009.
[7] Asifa, P. Kumam, Z. Shah, et al., “Radiative MHD unsteady Casson fluid flow with heat source/sink through a vertical channel suspended in porous medium subject to generalized boundary conditions[J].” Physica Scripta, vol. 96, no. 7, pp. 075213, 2021.
[8] Asifa, P. Kumam, D. At, et al., “Modeling and simulation based investigation of unsteady MHD radiative flow of rate type fluid; a comparative fractional analysis - Science Direct [J].” Mathematics and Computers in Simulation, 2021.
[9] T. Anwar, P. Kumam, Asifa, et al., “An exact analysis of radiative heat transfer and unsteady MHD convective flow of a second rade fluid with ramped wall motion and temperature [J].” Heat Transfer, 2020.
[10] T. Anwar, P. Kumam, Asifa, et al., “Generalized Unsteady MHD Natural Convective Flow of Jeffery Model with ramped wall velocity and Newtonian heating; A Caputo-Fabrizio Approach[J].” Chinese Journal of Physics- Taipei-, vol. 68, no. 1, pp. 849-865, 2020.
[11] T. Anwar, P. Kumam, I. Khan, et al., “Thermal analysis of MHD convective slip transport of fractional Oldroyd-B fluid over a plate [J].” Mechanics of Time-Dependent Materials pp. 1-32, 2021.
[12] M. Khan, C. Fetecau, T. Hayat. “MHD transient flows in a channel of rectangular cross-section with porous medium[J].” Physics Letters A, vol. 369, no. 1-2, pp. 44-54, 2007.
[13] X. Xiao, N. K. Chang, “Effects of the magnetic field direction and of the cross-sectional aspect ratio on the mass flow rate of MHD duct flows[J].” Fusion Engineering and Design, vol. 151, pp. 111373, 2020.
BIOGRAPHIES

Youlin Gu received the bachelor’s degree in mechanical engineering from Donghua University, China. He is currently working toward the Ph.D. degree with the School of Mechanical Engineering, Shanghai Jiao Tong University, China. His research focuses on optimization design of electromechanical systems, modeling and simulation of MHD, and topology optimization.

Qinghua Liang received the Ph.D. degree in mechanical engineering from Shanghai Jiao Tong University. Currently, he is an Associate Professor with the School of Mechanical Engineering, Shanghai Jiao Tong University. His research interests include intelligent machinery, complex electromechanical system innovative design, and machine vision.

Shigang Wang received the Ph.D. degree in mechanical engineering from the Huazhong University of Science and Technology. He is currently a Professor with the School of Mechanical Engineering, Shanghai Jiao Tong University, China. His research activities include complex electromechanical systems, electromagnetic drive, machine vision, pattern recognition, special robots, bionic design and intelligent control, and biologic robots.

Anlei Zhou received the master’s degree in mechanical engineering from Shanghai Maritime University, China. He is currently working toward the Ph.D. degree with the School of Mechanical Engineering, Shanghai Jiao Tong University. His current research interests include CFD and other numerical methods in engineering.
ACES JOURNAL, Vol. 37, No. 3, 348–353.
doi: 10.13052/2022.ACES.J.370312
© 2021 River Publishers