Antenna Synthesis by Levin’s Method using Reproducing Kernel Functions
Goker Sener
Department of Electrical-Electronics Engineering
Cankaya University, Ankara, 06790, Turkey
sener@cankaya.edu.tr
Submitted On: September 21, 2022; Accepted On: September 5, 2023
ABSTRACT
An antenna synthesis application is presented by solving a highly oscillatory Fourier integral using a stable and accurate Levin’s algorithm. In antenna synthesis, the current distribution is obtained by the inverse Fourier integral of the antenna radiation pattern. Since this integral is highly oscillatory, the Levin method can be used for its solution. However, when the number of nodes or the frequency increases, the Levin method becomes unstable and ineffective due to the large condition number of the interpolation matrix. Thus, an improved scheme of the method is used in an antenna synthesis application in which reproducing kernel functions are used as the basis of the approximation function. The accuracy of the new method is verified by a log-periodic antenna example. The error and stability analysis results show that the new method is more stable and accurate than other well-known kernels, especially for a large number of nodes.
Index Terms: Antenna synthesis, Fourier integral, highly oscillatory integrals, Levin’s method, reproducing kernel functions.
I. INTRODUCTION
Antenna synthesis aims to find the current distribution on a specific antenna geometry that yields the desired radiation pattern. This procedure is called beam shaping and is applied using the Fourier transform technique [1]. In antenna analysis, the Fourier integral of the current distribution gives the antenna radiation characteristics. Conversely, in antenna synthesis, the inverse Fourier integral of the radiation pattern gives the current distribution on the antenna geometry [2].
Since the Fourier integral is highly oscillatory, numerical techniques such as the Simpson rule and Gaussian-type quadrature methods are ineffective for solving such integrals [3]. Instead, the asymptotic expansion method (stationary phase), steepest descent method, and Filon and Levin methods are used [4, 5]. Each method has its advantages and disadvantages. For instance, in the asymptotic expansion method, the accuracy of the algorithm is dependent on the degree of oscillation. In the steepest descent and Filon methods, the steepest descent paths and the moments must be calculated, respectively. Similarly, in the Levin method, the solution fails in the presence of stationary points.
Nevertheless, the Levin method is used extensively and yields accurate solutions, especially with complex phase functions. Furthermore, the Levin method can be modified to obtain successful results even in stationary points utilizing a class of specific kernels such as radial basis functions (RBFs) [6]. For example, in [7, 8], Levin’s method, utilizing multiple quadrature radial basis functions (MQ-RBFs), is employed to provide accurate solutions in terms of relative errors for highly oscillatory integrals, both with and without singular points. Similarly, in [9], different RBFs such as the Gaussian type, are used to improve the convergence of the method in the presence of singular points.
The key feature of the Levin method is to convert integrals into a system of ordinary differential equations (ODEs), or partial differential equations (PDEs) [10, 11]. The solution of these equations is usually found by the linear equation system constructed by the collocation methods [12, 13]. In general, the accuracy of the differential equation solution determines the accuracy of the method.
The major drawback of the Levin method, with or without RBFs, is that the convergence matrix becomes ill-conditioned at high frequencies or when the number of nodes exceeds 10. In this case, the stability of the method decreases. The most common strategy against this problem is to use fewer nodes and divide the integration domain into more sub-intervals. On the other hand, if the domain has to be partitioned at a small number of intervals, mainly for faster evaluations, then the interpolation matrix has to be banded (sparse) for better convergence. There have been some attempts toward this goal in the literature. For example, in [9], the stability of the Levin method is increased by using Gaussian RBFs. Also, in a recent study in [14], the Levin method is modified to be an accurate and stable algorithm using compactly supported radial basis functions (CS RBFs). In this technique, the stability is increased because the application of CS RBFs for large-scale problems results in a sparse matrix of the system due to compact support [15]. However, the disadvantage of this method is that although it gives good stability in the solution of a high-dimensional system of equations, its accuracy decreases, especially when used with a small number of collation points.
In a recently published study in [16], another class of base functions, called reproducing kernel functions, are used in the Levin method for the first time, and very stable and accurate results are obtained. Reproducing kernel functions (RKFs) are defined in the reproducing kernel Hilbert space. This theory has been used to solve fractional differential equations and singular boundary value problems for the last few decades [17, 18].
In this paper, Levin’s method using RKFs, is used in an antenna synthesis application for the first time. First, the radiation pattern of a rotatable log periodic antenna (RLPA), 4030/LP/10, is sampled and transferred into Matlab. Next, this data is used to solve the inverse Fourier integral to find the equivalent antenna current distribution on a linear conductor. The accuracy of the results is verified by comparing the radiation pattern created by this current source with the original antenna pattern. The error and stability analysis results regarding the absolute error and matrix condition numbers are presented. The results for the RKF are also compared with the monomial and the radial Gaussian basis functions, which are known to yield accurate and stable outcomes with the Levin method. It is concluded that RKF offers the best accuracy and stability, particularly for a small number of integration intervals and a large number of collocation points.
II. LEVIN’S METHOD
Levin’s method is used to solve highly oscillatory integrals in the form
| (1) |
where is a smooth and slowly varying function, and is a highly oscillating function, usually written as , where is a constant and is a non-oscillatory smooth function. The oscillating nature of requires that .
The integration variable can be any physical variable, such as time. In antenna synthesis applications, and define the limits for the integration variable , which is defined as the angle for the radiation pattern function and the distance for the antenna length.
In Levin’s method, the function is defined as
| (2) |
Thus, the evaluation of the integral in (1) is reduced to finding and . The function can be approximated at collocation points as
| (4) |
where are some linearly independent basis functions, and ’s are the coefficients to be determined by the collocation conditions
| (5) |
Substituting (4) into (2) using (5) gives the linear equation system
| (6) |
whose solution gives the unknown coefficients . Then, (4) is substituted into (2) to find the solution to the integral in (1) as
| (7) |
The large convergence matrix of the linear system reduces the stability and efficiency of the method. In order to overcome this problem, instead of increasing the collocation number , the interval is divided into more sub-intervals. Alternatively, in the case of a small number of sub-intervals and a large number of collocation points, the linear system matrix can be made well-conditioned to maintain stability and accuracy. For this purpose, the basis function set should be chosen to be suitable with the collocation approximation. For example, if the function is a polynomial, then the should be a polynomial as well. In any case, the selection of the basis function set is vastly important in terms of the stability and the accuracy of the Levin method.
III. LEVIN’S METHOD WITH REPRODUCING KERNEL FUNCTIONS
In Levin’s method, the basis function is given as
| (8) |
where is the reproducing kernel function, defined as [16]
| (9) |
where
| (10) |
and , is the evaluation function and is acting on the function of . The reproducing kernel function , where is the reproducing kernel Hilbert space with .
By definition, a Hilbert space is named as reproducing kernel Hilbert space (RKHS), if for each , the function is known as the reproducing kernel function (RKF) of the Hilbert function space . The reproducing property of the Hilbert space is satisfied when
| (11) |
and
| (12) |
where the inner product property is called the reproducing property of the Hilbert space. Figure 1 shows the mapping through the Hilbert space. For further information on RKHS, the reader can refer to [19, 20].
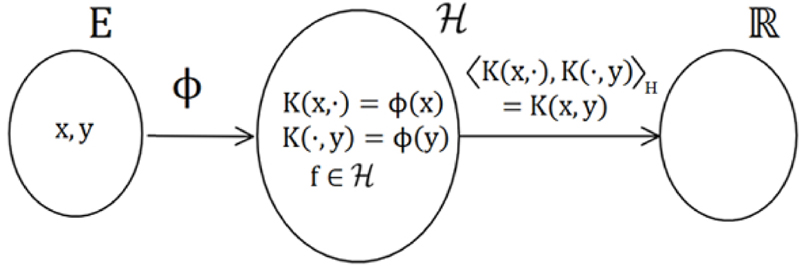
Figure 1: Mapping diagram for RKHS.
IV. ANTENNA SYNTHESIS APPLICATION I
A. Obtaining the radiation pattern
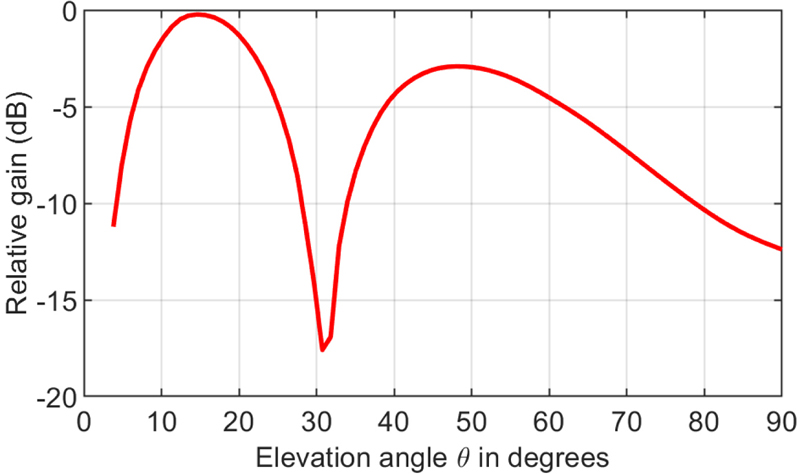
Figure 2: The radiation pattern of the antenna 4030/LP/10.
In this section, Levin’s method with RKF is used in an antenna synthesis application. For this purpose, the radiation pattern (space factor for the electric field) of the rotatable log periodic antenna, 4030/LP/10 manufactured by Giovannini E., is obtained from its spec sheet [21]. It is then interpolated by cubic splines at 91 points, and the pattern function, , in Fig. 2 is obtained.
B. Finding the current distribution
The equivalent current distribution on a linear antenna is found by solving the inverse Fourier integral
| (13) |
where is the unknown current distribution, and is the desired radiation pattern. The antenna is assumed to be located along the vertical axis, where the prime notation is used to designate the source coordinates. The variable is defined as , where is the free space wavenumber.
The limits of the integral in (13) are truncated to or , and the integral is divided into subintervals with each subinterval having collocation points (knots). Thus, the integral for each subinterval can be written as
| (14) |
where is the part of the radiation pattern in the given interval. Due to the linearity, the total current can be written as
| (15) |
The current distribution along the axis which would create the pattern in Fig. 2 is obtained by solving (14) using the Levin method with RKF for , , and . The resultant current distribution is shown in Fig. 3 for the antenna length .
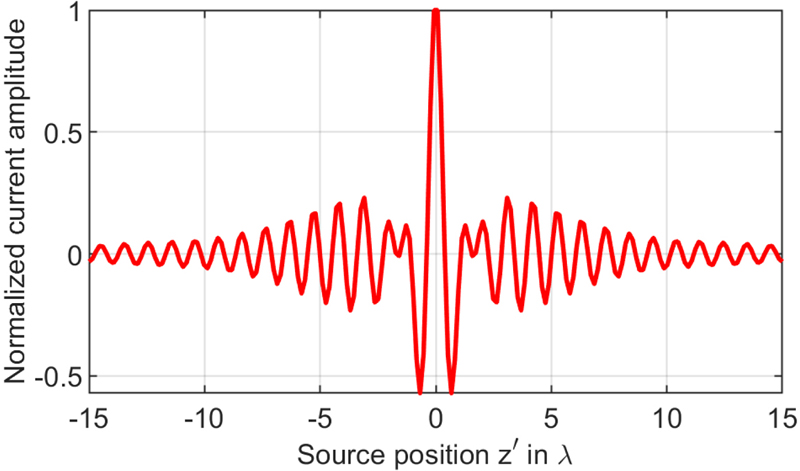
Figure 3: Normalized current distribution along , obtained by the Levin method with the RKF ().
C. Validating the results
To analyze the accuracy of the results, the radiation pattern created by this current distribution is evaluated by the Fourier integral
| (16) |
where the total antenna length is truncated to . This integral is also highly oscillatory. Therefore, the Levin method with RKF is reapplied. Higher accuracy is achieved by using and to eliminate any errors resulting from this second use of the method. Figure 4 shows the results where the accuracy increases as the number of intervals, , increases. In all simulations, the RKF is used with .

Figure 4: Radiation pattern due to .
D. Error and stability analysis
In this section, absolute errors and interpolation matrix condition numbers are evaluated for various and values. This is achieved by comparing the radiation pattern obtained by the Levin method with the RKF and the original pattern. Furthermore, the results are compared with the “monomial” and the “radial Gaussian” basis functions, both of which are used extensively with the Levin method [4, 10], particularly when polynomial or polynomial spline approximations are used.
The monomial basis functions are defined as
| (17) |
and in general, monomial kernels in Levin’s method yield very good accuracy with poor condition numbers at increased number of collocation points.
Another type of basis functions, used successfully with Levin’s method, is the radial Gaussian functions. These functions are defined as [4]
| (18) |
where the radial term for , which typically coincide with the collocation points. Additionally, the constant term is called the ”shape parameter” and is evaluated using the algorithm given in [7]. The radial Gaussian functions also yield good accuracy and stability even at an increased number of collation points. The increased stability is a result of the fact that the interpolation matrix becomes banded by radial functions with pre-defined shape parameters.
The error and stability analysis results are shown in Figs. 5 (a) and (b), respectively. In part a, the absolute error for the radiation pattern function is plotted using the Levin method with the RKF with respect to the collocation points . Four different graphs are obtained for each part, corresponding to the number of intervals, . In part b, the interpolation matrix condition numbers are plotted in decibels. In these simulations, the reproducing kernel function, , is used with .
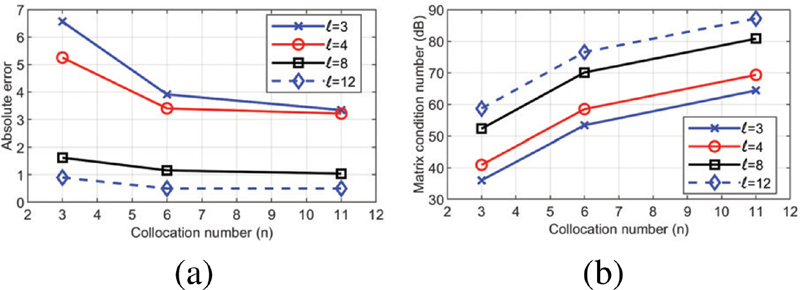
Figure 5: (a) Error, (b) stability analysis using the RKF, , for .
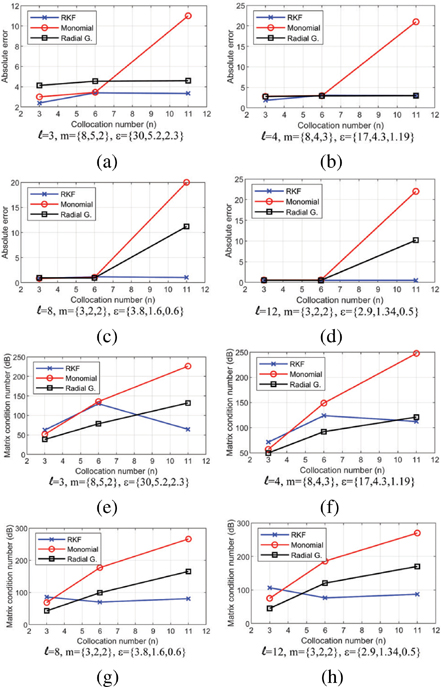
Figure 6: Error and stability analysis results at . and values are given with respect to the collocation numbers .
Figure 5 shows that when the RKF is used for the same value of , the error and stability decrease with an increased number of intervals and the number of collocation points .
Comparison of the RKF with the monomial and the radial Gaussian basis functions are shown in Fig. 6. In parts a-d and e-h, the absolute errors and the matrix condition numbers are plotted for respectively. In these simulations, the reproducing kernel function, , is used with the values that yield the most accurate results. In general, the accuracy of the Levin method with RKF increases with increasing ; however, after a threshold, it starts to decreases because of the high condition number of the interpolation matrix.
In Fig. 6, when the three basis functions are compared, the error is the smallest for the RKF when the optimum values for are used. Furthermore, RKF has the highest stability as the order of the approximation, , increases.
The accuracy and stability of the RKF against the other functions for different values of are presented in Tables 1 and 2, respectively. It can be seen that for a small number of intervals in the integration domain, i.e., , it is suitable to use for . On the other hand, for , can be used for the best accuracy.
Table 1: Absolute errors for
| Functions | |||
|---|---|---|---|
| Monomial | 3.0, 3.4, 11 | 0.8, 1.0, 20 | 0.6, 0.6, 22 |
| Rad. G. | 4.1, 4.5, 4.6 | 1.0, 0.9, 11 | 0.5, 0.5, 10 |
| RKF, =2 | 6.5, 3.9, 3.3 | 1.6, 1.1, 1.0 | 0.9, 0.5, 0.5 |
| RKF, =3 | 3.0, 3.7, 3.4 | 0.8, 1.6, 1.1 | 0.5, 0.6, 0.8 |
| RKF, =4 | 2.7, 3.8, 3.5 | 0.9, 2.5, 14 | 0.5, 12, 12 |
| RKF, =5 | 2.6, 3.4, 7.9 | 0.9, 14, 16 | 0.5, 5.2, 13 |
| RKF, =8 | 2.4, 5.4, 8.4 | 1.0, 11, 10 | 0.5, 15, 11 |
Table 2: Interpolation matrix condition numbers for (note that )
| Functions | |||
|---|---|---|---|
| Monomial | e5, e13, e22 | e6, e17, e26 | e7, e18, e27 |
| Rad. G. | e3, e7, e13 | e4, e9, e16 | e4, e12, e17 |
| RKF, =2 | e3, e5, e6 | e5, e7, e8 | e5, e7, e8 |
| RKF, =3 | e5, e8, e10 | e8, e11, e13 | e9, e12, e14 |
| RKF, =4 | e5, e10, e13 | e9, e15, e17 | e10,e16, e17 |
| RKF, =5 | e6, e12, e16 | e9, e16, e17 | e10,e16, e17 |
| RKF, =8 | e6, e15, e17 | e9, e16, e17 | e10,e16, e17 |
V. ANTENNA SYNTHESIS APPLICATION II
In this section, the radiation pattern of a narrow beam antenna is interpolated by cubic splines at 91 points, and the radiation pattern function, , is obtained as shown in Fig. 7. The beam is centered at with a beamwidth of .
This pattern function is then used in the inverse Fourier integral to find the current distribution on an equivalent linear source. Levin’s method with RKF is used to solve this integral using , , and . The resultant current distribution is shown in Fig. 8 for the antenna length .
This current function is then used in the Fourier integral to obtain the radiation pattern. During this evaluation, a large number of intervals are used to keep the margin of error to a minimum. Thus, from the point of view of the method, only the first integral, to find the current distribution, is taken into account. The radiation pattern found by the second Fourier integral is used to assess the error and stability of the method. The results for , , and are compared against the original pattern in Fig. 7.
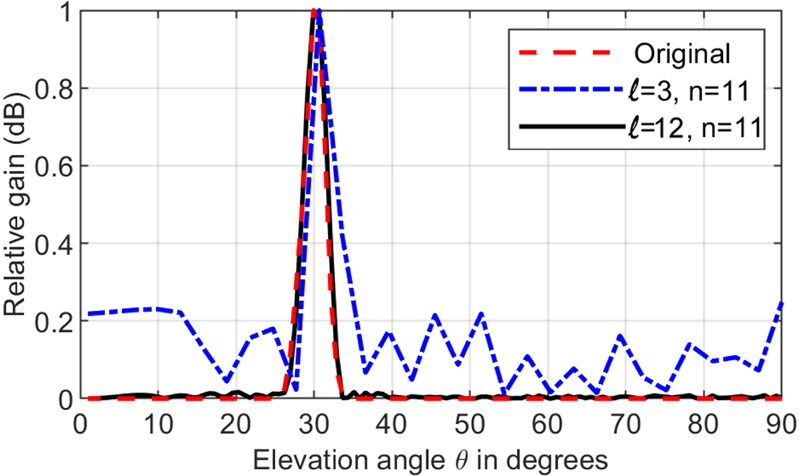
Figure 7: Narrow-beam antenna radiation pattern.
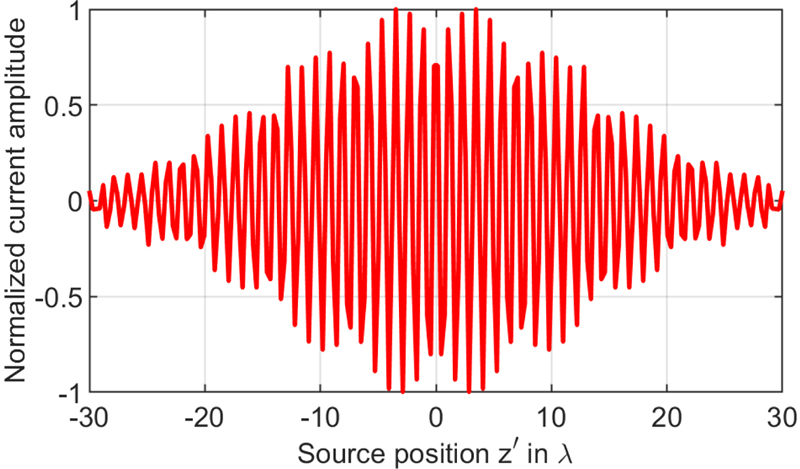
Figure 8: Narrow beam antenna normalized current distribution.
Comparison of the RKF with the monomial and the radial Gaussian functions are presented in Table 3 in terms of the absolute error. The stability results are the same as in the previous application, given inTable 2.
Table 3: Absolute errors for
| Functions | |||
|---|---|---|---|
| Monomial | 5.2, 2.0, 1.8 | 2.0, 0.9, 12 | 0.9, 0.3, 30 |
| Rad. G. | 5.2, 2.5, 1.4 | 2.0, 1.2, 0.9 | 1.0, 0.5, 0.5 |
| RKF, =2 | 6.1, 6.8, 7.2 | 5.3, 3.2, 3.5 | 1.5, 0.7, 0.3 |
| RKF, =3 | 5.3, 2.8, 1.6 | 2.0, 4.5, 1.4 | 0.8, 0.6, 0.5 |
| RKF, =4 | 5.0, 2.4, 1.4 | 2.0, 22, 3.8 | 0.8, 0.4, 13 |
| RKF, =5 | 4.8, 2.0, 3.8 | 2.0, 1.4, 13 | 0.8, 3.8, 12 |
| RKF, =8 | 4.7, 2.4, 10 | 2.0, 12, 14 | 0.8, 6.4, 10 |
The results show that for a small number of intervals in the integration domain, i.e., , it is suited to use for . On the other hand, for , can be used for the best accuracy.
VI. CONCLUSION
Levin’s method has been used with the RKF in antenna synthesis applications. Based on the results of the examples, the following conclusions are made.
If the radiation pattern is given for , the number of intervals gives the best results for corresponding to . The accuracy and stability at these settings are generally greater than the monomial and radial Gaussian functions. Only in a few cases are they equal.
For , or yields the best results for , respectively. The accuracy and stability at these settings are also generally greater than the monomial and radial Gaussian functions, if not the same. Also, for , the simulations have shown similar results to the case regarding accuracy and stability.
For , for is the single setting that produces the most accurate results in both examples. However, the accuracy and stability in these settings are generally equal to or less than the monomial and the radial Gaussian functions. One must use the optimum values to get more accurate results.
As a result, Levin’s method with RKF is suitable for antenna synthesis applications providing better accuracy and stability, in most cases, than the other known kernels, such as the monomial and radial Gaussian functions, specifically for small or large numbers of intervals, i.e., or .
REFERENCES
[1] C. A. Balanis, Antenna Theory, New York, John-Wiley and Sons, 1997.
[2] O. M. Bucci, G. D’Elia, G. Mazzarella and G. Panariello, “Antenna pattern synthesis: a new general approach,” Proceedings of the IEEE, vol. 82, no. 3, pp. 358-371, 1994.
[3] G. A. Evans and J. R. Webster, “A comparison of some methods for the evaluation of highly oscillatory integrals,” Journal of Computational and Applied Mathematics, vol. 112, no. 1-2, pp. 55-69, Nov. 1999.
[4] S. Khan, S. Zaman, A. Arama, and M. Arshad, “On the evaluation of highly oscillatory integrals with high frequency,” Engineering Analysis with Boundary Elements, vol. 121, pp. 116-125, Dec. 2020.
[5] A. Isarles and S. P. Norsett, “Efficient quadrature of highly oscillatory integrals using derivatives,” Mathematical, Physical and Engineering Sciences, vol. 461, pp. 1-14, May 2005.
[6] S. U. Islam, I. Aziz, and W. Khan, “Numerical integration of multi-dimensional highly oscillatory, gentle oscillatory and non-oscillatory integrands based on wavelets and radial basis functions,” Engineering Analysis with Boundary Elements, vol. 36, no. 8, pp. 1284-1295, Aug. 2012.
[7] S. U. Islam, A. S. Al-Fhaid, and S. Zaman, “Meshless and wavelets based complex quadrature of highly oscillatory integrals and the integrals with stationary points,” Engineering Analysis with Boundary Elements, vol. 37, no. 9, pp. 1136-1144, Sep. 2013.
[8] S. U. Islam and S. Zaman, “New quadrature rules for highly oscillatory integrals with stationary points,” Journal of Computational and Applied Mathematics, vol. 278, pp. 75-89, April 2015.
[9] S. Zaman, S. Khan and S. U. Islam, “An accurate computation of highly oscillatory integrals with critical points,” Journal of Mathematics, vol. 50, no. 4, pp. 105-118, 2018.
[10] D. Levin, “Procedures for computing one- and two-dimensional integrals of functions with rapid irregular oscillations,” Mathematics of Computation, vol. 38, no. 158, pp. 531-538, April 1982.
[11] M. Uddin, Z. Minullah, A. Ali, and Kamran, “On the local kernel-based approximation of highly oscillatory integrals,” Miskolc Mathematical Notes, vol. 16, no. 2, pp. 1253-1264, March 2015.
[12] H. Brunner, Collocation Methods for Volterra Integral and Related Functional Equations, New York, Cambridge University Press, 2004.
[13] Z. C. Li, T. T. Lu, H. Y. Hu, and A. H. D. Cheng, Trefftz and Collacation Methods, Wit Press,2008.
[14] S. Khan, S. Zaman, M. Arshad, H. Kang, H. H. Shah and A. Issakhov, “A well-conditioned and efficient Levin method for highly oscillatory integrals with compactly supported radial basis functions,” Engineering Analysis with Boundary Elements, vol. 131, no. 8, pp. 51-63, Oct. 2021.
[15] R. Schaback and H. Wendland, “Using compactly supported radial basis functions to solve partial differential equations,” Transactions on Modelling and Simulation, vol. 22, pp. 311-323, 1999.
[16] F. Z. Geng and X. Y. Wu, “Reproducing kernel function-based Filon and Levin methods for solving highly oscillatory integral,” Applied Mathematics and Computation, vol. 397, May 2021.
[17] L. Xiuying and W. Boying, “A new reproducing kernel method for variable order fractional boundary value problems for functional differential equations,” Journal of Computational and Applied Mathematics, vol. 311, pp. 387-393, Feb. 2017.
[18] F. Z. Geng and S. P. Qian, “Modified reproducing kernel method for singularly perturbed boundary value problems with a delay,” Applied Mathematical Modelling, vol. 39, no. 18, pp. 5592-5597, Sept. 2015.
[19] O. Baver, Reproducing Kernel Hilbert Spaces, M.S. dissertation, Bilkent University, Aug. 2005.
[20] L. Wasserman, Function Spaces Lecture Notes, Department of Statistics and Data Science, Carnegie Mellon University, pp. 1-15.
[21] Giovannini Elettromeccanica, “HF Log-periodic Antenna 4 to 30 MHz Mod. 4030/LP/10, 4030/LP/2,” [Online] https://www.antenna.it/military/images
BIOGRAPHIES

Goker Sener was born in 1973. He completed his B.S. in electrical engineering in 1995 at the Wright State University, Dayton, OH. He completed his M.S. and Ph.D. in electrical and electronics engineering in 2004 and 2011 at the Middle East Technical University, Ankara, Turkey. He is currently an assistant professor at Cankaya University Electrical Electronics Engineering Department, Ankara, Turkey. His fields of interest are electromagnetic theory and antennas.
ACES JOURNAL, Vol. 38, No. 7, 482–488
doi: 10.13052/2023.ACES.J.380703
© 2023 River Publishers