Design of GNSS/INS Coupled Navigation Algorithm Using Adaptive Neuro-Fuzzy Inference Systems
Chen Zerui, Xiao Yanhong, Wu Xin, Hu Houpeng, Xiao Jian, Yang Shang,
and Gao Zhenghao
Guizhou Power Grid Co. Ltd.
Electric Power Science Research Institute, Guizhou, Guiyang 550002, China
chen_ze011@outlook.com, xiao_yanhong18@outlook.com, wu_xin96@outlook.com, hu_houpeng85@outlook.com xiao_jian25@outlook.com, yang_shang18@outlook.com, gao_zhenghao96@outlook.com
Submitted On: January 2, 2025; Accepted On: June 11, 2025
ABSTRACT
Traditional GNSS/INS (Global Navigation Satellite Systems/Inertial Navigation Systems) coupled navigation algorithms often struggle with accuracy in GNSS-denied or challenging environments. This paper introduces a novel adaptive fusion algorithm leveraging an Adaptive Neuro-Fuzzy Inference System (ANFIS) that dynamically adjusts sensor weightings based on real-time signal quality and system performance. The core innovation lies in the real-time integration of fuzzy logic and neural network learning, enabling the system to continuously adapt and optimize its decision-making rules for navigation accuracy. A comprehensive, dynamic error source model is constructed incorporating GNSS atmospheric delays, orbit errors, and INS drift to enhance the learning-driven weight adjustment mechanism. The resulting ANFIS-based fusion strategy shows significant superiority over traditional Kalman-based methods, achieving over 90% robustness across harsh scenarios with an average execution time of 0.69 seconds, demonstrating improved adaptability, learning capability, and fault resilience in dynamic environments.
Index Terms: Adaptive neuro-fuzzy inference system, data fusion, GNSS/INS coupled navigation, signal loss, system robustness.
I. INTRODUCTION
GNSS (Global Navigation Satellite Systems) and INS (Inertial Navigation Systems) are widely used in modern navigation technology, especially in autonomous driving, aerospace, and drones. GNSS provides global positioning information but is limited by signal shielding, multipath effects, and atmospheric delays, especially in environments such as high-rise buildings and tunnels in cities, which can easily lead to positioning errors or signal loss. INS provides high-frequency dynamic positioning through inertial sensors (accelerometers and gyroscopes), but its errors accumulate over time, gradually decreasing accuracy. GNSS/INS (Global Navigation Satellite Systems/Inertial Navigation Systems) coupled navigation technology came into being to overcome the shortcomings of GNSS and INS. EGNSS refers to the European Global Navigation Satellite System, developed by the European Union and primarily represented by the Galileo program. It complements other systems like GPS to improve positioning accuracy and reliability, especially in Europe. Traditional methods such as Kalman filtering have poor robustness in harsh environments and achieving high-precision and stable navigation is difficult.
Many researchers have applied different optimization schemes in response to the challenges of GNSS/INS coupled navigation technology. Abdolkarimi and Mosavi [1] proposed an improved neuro-fuzzy system to handle the prediction of INS positioning errors during long-term GPS outages. Cong et al. [2] found that the random error characteristics of inertial sensors and the instability caused by GNSS signal interruption threaten MEMS-based GNSS/INS vehicle navigation systems and improved positioning accuracy through the data fusion method of support vector machines. Traditional extended Kalman filters (EKF) and unscented Kalman filters (UKF) have been widely used in GNSS and INS data fusion. Traditional GNSS/INS fusion methods like EKF and UKF struggle in complex environments such as tunnels and urban canyons due to their poor robustness under GNSS signal degradation or loss [3–5]. Their reliance on linearity and Gaussian noise assumptions limits effectiveness in nonlinear and noisy real-world conditions. Fixed parameters also reduce adaptability to dynamic changes [6]. Moreover, cumulative INS errors, particularly drift, remain uncorrected during GNSS outages [7]. Conventional models cannot effectively address nonlinear errors like multipath and atmospheric disturbances [8]. Even fuzzy logic and machine learning approaches often lack sufficient real-time adaptability in dynamic scenarios.
Given the limitations of traditional GNSS/INS data fusion methods, the research community has been committed to exploring the fusion application of advanced technologies such as fuzzy logic and neural networks in recent years. Neural networks have significant advantages in dealing with complex nonlinear problems, while fuzzy logic can effectively deal with system uncertainty. Early research shows that fuzzy inference systems can improve robustness by adapting GNSS/INS fusion weights [9–10]. However, most of these studies are based on static models for analysis and research, and many also face difficulties: lack of real-time adaptability and difficulty adapting to complex and changeable dynamic environments [11].
This study uses the GNSS/INS coupled navigation algorithm of Adaptive Neuro-Fuzzy Inference Systems (ANFIS) to integrate the adaptive characteristics of fuzzy logic and the learning ability of neural networks to achieve the function of quickly responding to environmental changes. Enhancing ANFIS for GNSS/INS navigation involves integrating electromagnetic signal propagation models that account for diffraction, reflection, refraction, and attenuation in complex environments. These models provide key variables like multipath effects, signal delays, and local electromagnetic field variations, which can be used as inputs for ANFIS. By including these propagation-aware parameters, ANFIS can more accurately detect signal degradation and distinguish between different types of errors. This allows for proactive adjustment of GNSS and INS weightings in the fusion process, maintaining accuracy even during signal obstruction or interference. Real-time implementation can utilize ray-tracing, urban environment maps, or machine learning-based estimators. Overall, this integration boosts robustness, precision, and adaptability of the navigation system in dynamic and harsh conditions.
This paper introduces a GNSS/INS coupled navigation algorithm using ANFIS, which integrates fuzzy logic and neural networks to handle nonlinear and uncertain environments. It achieves real-time data fusion and dynamic weight adjustment based on environmental conditions, enhancing accuracy and robustness. The approach models and corrects complex error sources such as signal loss, sensor drift, and atmospheric interference. With an average runtime of just 0.69 seconds, the algorithm meets high-performance computing demands. Its robust design parallels advanced numerical modeling in mechanics and offers transferable values across domains. Applications include autonomous navigation, structural monitoring, and real-time system control. By constructing a precise error source model and designing an adaptive data fusion strategy and dynamic adjustment mechanism, the efficient fusion of GNSS and INS data is completed. Particularly when the GNSS signal is unstable or interrupted, ANFIS can instantly adjust the INS weight to ensure system continuity and accuracy [12]. Experimental results show that the algorithm has a robustness of over 90% in various harsh environments and a running time of 0.69 seconds. Compared with traditional algorithms, its performance is significantly improved, overcoming the robustness challenge in complex environments.
Traditional GNSS/INS-enabled navigation systems struggle to maintain accuracy and resilience in complex and difficult environments such as urban canyons, tunnels, and signal interference or multipath zones. GNSS suffers from signal loss and degradation, whereas INS errors build over time. Because of their linear assumptions and set parameter configurations, traditional data fusion approaches such as UKF and EKF lack adaptability and robustness in such environments. Furthermore, current intelligent technologies, such as static fuzzy logic and neural network models, frequently fail to respond in real time to dynamic environmental changes.
This paper proposes a novel GNSS/INS coupled navigation algorithm based on ANFIS. The main contributions include:
Developing a comprehensive GNSS/INS error model accounting for GNSS signal degradation (e.g., atmospheric delay, multipath) and INS drift and bias.
Designing an adaptive neuro-fuzzy system combining fuzzy logic and neural networks to dynamically adjust GNSS/INS data fusion.
Implementing a strategy to automatically shift reliance between GNSS and INS based on signal quality and environmental changes.
Achieving over 90% robustness and maintaining low positioning errors even under signal loss, interference, and multipath effects.
Demonstrating fast processing with an average running time of 0.69 seconds, outperforming EKF and UKF methods in both speed and accuracy.
The primary aim of this study is to develop a robust, high-precision, real-time adaptive GNSS/INS coupled navigation system by leveraging the capabilities of ANFIS. This system is intended to overcome the limitations of traditional fusion methods and provide reliable navigation performance under dynamic and harsh environmental conditions.
II. RELATED WORK
Wu [13] enhanced a GPS/INS ultra-tightly-coupled system using a neural-fuzzy adaptive Kalman filter, where a fuzzy controller adjusts measurement noise based on innovations and a neural network optimizes its parameters. This ANFIS-based approach improves accuracy and robustness in dynamic noise conditions, supporting reliable GNSS/INS navigation. Lai et al. [14] addressed high uncertainty in tightly-coupled GNSS/INS systems using an adaptive fuzzy neural network-aided progressive Gaussian filter. They jointly estimated step size and measurement noise via a variational Bayesian approach. A fuzzy algorithm adapted measurement noise, while a neural network refined state error covariance. This formed an ANFIS-based filtering framework. The approach improved estimation robustness and accuracy. Experiments showed superior performance over existing filters.
Yue et al. [15] developed a robust GNSS/INS navigation algorithm for urban and GNSS-denied environments. A two-tier fusion scheme was used to enhance accuracy. SVR-AKF adaptively fuses GNSS and INS data by tuning Kalman filter parameters, ANFIS models and corrects INS drift during GNSS outages. This approach effectively handled sensor nonlinearities and uncertainties. Road tests confirmed improved positioning performance.
Wang et al. [16] used a centralized Kalman filter with loose coupling for efficient GNSS/INS integration. Feedback correction maintained accuracy over long durations. The system is simple, reliable, and suitable for low-power UAVs. It offers a solid baseline for intelligent methods like ANFIS. ANFIS can adapt to nonlinear errors and improve performance in dynamic conditions. This foundation supports the development of an adaptive neuro-fuzzy navigation algorithm.
Mahdi et al. [17] proposed a system integrating RISS with GNSS using ANFIS for accurate navigation in GNSS-degraded areas. ANFIS calibrated sensor errors, enhancing reliability during outages. It outperformed traditional methods in 2D RMSE and maximum error. Real-world tests confirmed its robustness. The method is scalable to low-cost IMUs. This makes it suitable for diverse navigation applications.
Wang et al. [18] addressed GNSS/INS integration challenges using tight coupling, non-holonomic constraints, and outlier rejection to enhance robustness and accuracy. These methods are effective during GNSS outages and sensor drift. ANFIS can further improve this by learning nonlinear system behaviors and adapting in real-time. Its data-driven approach outperforms traditional filters in dynamic conditions. Thus, Wang et al. provided a strong foundation for integrating ANFIS into navigation algorithms.
Gudivaka and Thanjaivadivel [19] presented an IoT-based adaptive signal processing framework to enhance robotic navigation through intelligent sensor fusion. Their adaptive fusion strategy is leveraged in this research by integrating GNSS and INS data using ANFIS to handle nonlinearities and sensor drift. This integration improves navigation accuracy, robustness to signal loss, and adaptability in dynamic environments.
Sun et al. [20] demonstrated effective GNSS/compass fusion using ANFIS for real-time vehicle positioning and car-following status detection. The method accurately interpreted dynamic parameters with a low false alarm rate. This parallels GNSS/INS integration, where INS can enhance state estimation. ANFIS proved capable of handling nonlinear, uncertain sensor data. Their results validated the feasibility of real-time intelligent inference. This supports the development of an ANFIS-based GNSS/INS navigation algorithm.
The MCPP method by Zhao and Yang [21] supports ANFIS-based GNSS/INS design by providing satellite fault probabilities as adaptive inputs. These enhance ANFIS’s ability to model nonlinear errors and handle GNSS faults. Both aim to improve urban positioning accuracy. MCPP’s probabilistic approach complements ANFIS’s fuzzy logic, avoiding fixed thresholds. Its use in tightly-coupled systems ensures compatibility. Real-world tests validate its effectiveness for intelligent navigation fusion.
Table 1: Comparative analysis of ANFIS-based GNSS/INS integration methods
| Reference | Method | Advantage | Limitation |
| Wu [13] | Neural-fuzzy adaptive Kalman filter with ANFIS | Adapts to dynamic noise; improves accuracy and robustness | Complex tuning; not real-time |
| Lai et al. [14] | ANFIS progressive Gaussian filter variational Bayes | Joint estimation of step size and noise; high robustness | Computationally heavy |
| Yue et al. [15] | SVR-AKF ANFIS to model INS drift | Robust in urban/GNSS-denied areas; two-level fusion | SVR may not generalize well |
| Wang et al. [16] | Centralized Kalman filter (loose coupling) with ANFIS potential | Low-power, simple system; suitable for UAVs | Loose coupling limits integration accuracy |
| Mahdi et al. [17] | RISS-GNSS-ANFIS integration | High accuracy in degraded areas; scalable to low-cost IMUs | Focused on 2D; needs expansion to 3D/6DOF |
| Wang et al. [18] | Tight coupling non-holonomic constraints outlier rejection | Resilient to sensor drift and GNSS loss | Relies heavily on constraints and threshold tuning |
| Gudivaka & Thanjaivadivel [19] | IoT-based ANFIS sensor fusion for robots | Adaptive to environment; robust to drift | Limited to robotics context; generalization may vary |
| Sun et al. [20] | GNSS/Compass ANFIS | Real-time, low false alarms; dynamic adaptation | Less applicable to full GNSS/INS integration |
| Zhao & Yang [21] | MCPP ANFIS | Probabilistic satellite fault handling; better error modeling | May need high computational load for MCPP |
| Jwo et al. [22] | ANN fusion framework | Supports learning without system model | Lacks interpretability; ANN-only |
| Wu et al. [23] | Adaptive deep learning for INS correction | Generalizable, interpretable; no strict noise assumptions | Deep models may overfit or need large data |
| Zhang & Wang [24] | DGP-MLP hybrid; uses GNSS history fuzzy logic | Supports ANFIS input design; real-world tested | Not inherently real-time ANFIS |
| Guo & Tu [25] | LSTM EMD/Wavelet EKF | Predictive during GNSS outage; interpretable | LSTM training is time-intensive; sensitive to outliers |
Jwo et al. [22] highlighted the importance of GNSS/INS integration for robust navigation in GNSS-denied environments. They emphasize AI methods, particularly ANNs, for modeling without detailed physical system knowledge. Their support for ANN-based fusion aligns with the shift toward intelligent systems like ANFIS. ANFIS combines neural learning with fuzzy logic for adaptive performance. The study’s focus on performance evaluation supports assessing ANFIS-based models. Overall, their findings justify developing advanced GNSS/INS fusion algorithms using ANFIS. The work by Wu et al. [23] enhances GNSS/INS integration using adaptive deep learning to correct INS errors from nonlinear noise. It reflects ANFIS principles by modeling without strict noise assumptions and combining learning with filtering for interpretability. The model emphasizes efficiency and generalization. Experimental results under GNSS loss show significant accuracy gains, supporting ANFIS-based adaptive navigation algorithm design.
Zhang and Wang [24] proposed the DGP-MLP method to enhance GNSS/INS navigation during outages, aligning with ANFIS-based approaches. Their hybrid model supports the integration of fuzzy logic and learning, with adaptive training strategies similar to ANFIS tuning. Using past GNSS data for prediction also informs ANFIS input design. Real-world results validate its effectiveness, supporting the development of ANFIS-based navigation systems. Guo and Tu [25] used LSTM to predict pseudo-GNSS data during outages from IMU and INS inputs, a role ANFIS can also fulfill. EMD and wavelet filtering improve data quality. ANFIS offers interpretable, adaptive learning. Like LSTM, it trains with GNSS and predicts during loss. EKF fuses predictions to correct INS drift, supporting ANFIS-based GNSS/INS design.
Table 2 provides a comparative overview of recent research efforts integrating ANFIS into GNSS/INS navigation algorithms. It summarizes each study’s methodology, highlights the key advantages that ANFIS brings (such as improved robustness, adaptability, and accuracy in complex or GNSS-denied environments) and outlines the main limitations or challenges faced, including computational complexity, tuning difficulty, and real-time adaptability. This comparison helps to identify strengths and gaps in current approaches, guiding future developments in intelligent navigation systems.
III. SYSTEM DESIGN AND IMPLEMENATION
A. Problem modeling and error sources
1. GNSS error model
GNSS signal errors mainly come from atmospheric delay, satellite orbit error, multipath effect, and signal shielding. Traditional GNSS/INS fusion navigation often simplifies GNSS errors into white or Gaussian noise while ignoring the uncertainty in the actual environment. Especially under multipath and shielding conditions, the navigation positioning accuracy is significantly reduced. To more accurately describe GNSS errors, this study constructs a dynamic error model, which comprehensively considers the influence of satellite geometry, multipath effect, and environmental shielding. By applying satellite geometry error, shielding condition, and reflected signal strength as input, a dynamic weight adjustment strategy is adopted to achieve real-time error estimation and correction. In response to multipath or shielding problems, this study combines satellite orbit and position error models for further optimization to improve positioning accuracy in complex environments:
| (1) |
is the GNSS positioning error in meters (m). is the satellite geometric error, indicating the change in the satellite geometric structure, which is usually related to the number and position of satellites. is the signal strength change, the signal-to-noise ratio change. Multipath is the multipath effect, which indicates the error caused by signal reflection or refraction. Blockage is the signal occlusion, indicating environmental factors’ impact on signal reception. is random noise or other unmodeled error sources. , and are weight factors which indicate the contribution of different error sources to the positioning error.
2. INS error model
The main sources of error in the INS system include sensor offset, zero drift, calibration error, and inertial integration error, especially the drift problem of the accelerometer and gyroscope. Since the error of INS is cumulative, the error gradually amplifies during long-term operation, affecting the system’s accuracy. This study analyzes the noise characteristics of INS sensors and constructs the error propagation model of the accelerometer and gyroscope. The Kalman filter framework is used to dynamically correct INS’s zero drift and sensor offset. For the drift error of the accelerometer and gyroscope, the study applies an adaptive calibration method based on real-time sensor feedback and model prediction, continuously correcting the error gain during the navigation process, thereby reducing the cumulative error of INS. Further, through the periodic correction of inertial data and the dynamic optimization of the error gain matrix, the accuracy stability of INS in long-term operation is enhanced, ensuring that it can provide relatively accurate positioning information even without GNSS support. The error gain update equation is:
| (2) |
where is the adaptive error gain, is the error at the first moment, is the forgetting factor.
To solve the problem of GNSS and INS error coupling, a comprehensive error source model is constructed and integrates the geometric, multipath, and occlusion errors of GNSS and the drift and integral errors of INS. Through in-depth analysis of the error characteristics, fuzzy logic is used to dynamically allocate the weights of each error source. When the GNSS signal quality decreases, the system intelligently increases the INS weight to stabilize positioning. When the signal is stable, the GNSS weight is strengthened to improve accuracy. The model optimizes data fusion based on the real-time transmitted data and environmental factors to complete the real-time correction of error source parameters.
B. ANFIS architecture design
1. Fuzzy logic and neural network
The fuzzy logic component of ANFIS is specifically designed to handle the uncertainty factors in the GNSS/INS fusion process. It first converts the two continuously changing indicators (GNSS signal quality and INS error) into fuzzy sets through membership functions. The system derives the corresponding weight adjustment factor and error correction amount using the IF-THEN fuzzy inference mechanism. Next, using a fuzzy rule base, the system flexibly adjusts the weight allocation between GNSS and INS based on the current signal quality and error characteristics. This mechanism ensures that, when the GNSS signal is unstable or missing, the system can maintain highly accurate and stable positioning performance by augmenting the INS.
The neural network in the ANFIS system concentrates on optimizing the rules and parameters of the affiliation function in fuzzy logic to enhance the system’s ability to adapt to the dynamic environment. The system accurately adjusts the center value and width of the affiliation function. It optimizes the weights and bias parameters to minimize the error using the feed-forward neural network structure and the backpropagation algorithm. Even in extreme cases, such as high occlusion of the GNSS signal, the system still maintains a stable and reliable performance. The process is displayed in Fig. 1.
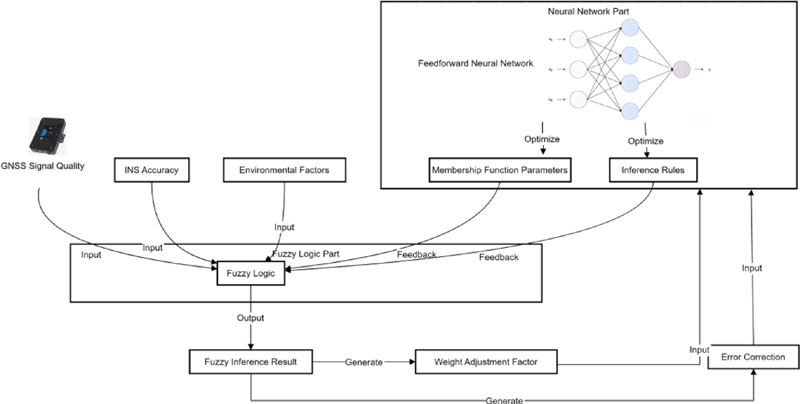
Figure 1: ANFIS process in the GNSS/INS coupled navigation system.
Fuzzy logic and neural networks enhance the error source model for GNSS/INS integration via the ANFIS. ANFIS effectively models GNSS errors like atmospheric delay, multipath effects, and signal blockage as well as INS errors, including sensor drift. Fuzzy logic addresses uncertainty and nonlinearity by assigning weights based on signal and environmental conditions, while neural networks optimize fuzzy membership functions and rules through learning. Fuzzy logic transforms real-time variables such as GNSS signal quality into fuzzy sets and utilizes IF-THEN rules for weight allocation between GNSS and INS, ensuring stable navigation. The neural network component refines fuzzy rules using backpropagation and gradient descent, allowing adaptation to real-time changes. ANFIS dynamically adjusts weightings, improving navigation accuracy and system robustness, achieving over 90% reliability with a 0.69-second average response time.
2. ANFIS model training and optimization
ANFIS uses supervised learning combined with the gradient descent method and backpropagation algorithm to optimize the neural network’s fuzzy rules and various parameters. IF-THEN logic statements used in fuzzy systems to handle uncertainty. They enable adaptive decision-making in GNSS/INS systems by adjusting weights based on conditions like signal quality. In the training process, the backpropagation algorithm minimizes the prediction error. It gradually adjusts the weight of the neural network to optimize the membership function parameters in the fuzzy rule base. At the same time, the output weight in the fuzzy reasoning process is adjusted by the gradient descent method to improve the data fusion strategy. Through multiple training cycles, the model gradually adapts to different environmental changes, adjusts the fusion ratio of GNSS and INS in real-time, enhances the role of INS when the GNSS signal is unstable, and strengthens the weight of GNSS when the GNSS signal is strong, ensuring that the system always maintains the best navigation accuracy. Finally, the trained ANFIS model automatically adjusts and optimizes the data fusion strategy in various environments, improving the accuracy and robustness of the GNSS/INS coupled navigation system. The ANFIS model utilizes supervised learning, merging gradient descent and backpropagation to refine fuzzy rules and network parameters. The backpropagation algorithm minimizes prediction errors by adjusting neural network weights, enhancing membership function parameters. Simultaneously, output weights in the fuzzy inference process are updated via gradient descent to improve data fusion. Through repeated training, the model adapts to environmental changes, adjusting the GNSS and INS fusion ratio. It increases INS weight in weak GNSS signals and favors GNSS in high-quality conditions. After training, ANFIS autonomously optimizes data fusion in real time, enhancing the accuracy and robustness of GNSS/INS navigation systems. In GNSS/INS integration using ANFIS, gradient descent and backpropagation are employed to optimize data fusion under varying environmental conditions. Gradient descent minimizes prediction errors by adjusting fuzzy system parameters, while backpropagation fine-tunes neural network weights and membership functions. This enables real-time adaptation to signal quality and sensor errors, allowing the system to shift reliance between GNSS and INS based on reliability. Unlike traditional methods, this approach effectively handles nonlinearities and signal disruptions, maintaining over 90% robustness and ensuring accurate navigation even in harshenvironments.
C. GNSS and INS data fusion strategy
1. Data fusion strategy design
To give full play to the complementary effect of GNSS and INS, this study is based on the adaptive data fusion strategy of ANFIS. When the GNSS signal is stable and accurate, the system increases the weight of the GNSS to provide accurate positioning information. Once the GNSS signal is interfered with or lost, the system automatically switches to INS mode and adjusts the weight of INS to maintain continuous positioning. ANFIS adjusts the weight distribution of GNSS and INS based on data to ensure that high-precision navigation can still be achieved using INS when the GNSS signal fluctuates.
2. Implementation of the fusion process
ANFIS uses the quality of real-time signals, historical parameters, and the status of various environments to adjust the weights of GNSS and INS in data fusion. The GNSS weight is reduced and the INS weight is increased to deal with the influence of GNSS signals being blocked and multipath effects. When the signal is good, the GNSS weight is dynamically enhanced. With the help of fuzzy rules generated by training, ANFIS effectively handles the nonlinear relationship between GNSS and INS, balances the positioning results of the two through fuzzy inference, and avoids single sensor errors. Even when the GNSS signal is missing or disturbed, the system can adjust the INS weight.
Figure 2 shows the dynamic adjustment of weights based on real-time signal quality and environmental factors in the GNSS/INS coupling system. In the upper part of Fig. 2, as the GNSS signal quality improves, the weight of GNSS increases, and the weight of INS decreases. When the GNSS signal quality is 0.9, the GNSS weight is close to 1 and the INS weight drops to around 0. The lower part of Fig. 2 shows the impact of environmental factors on the weight. When environmental factors increase, the GNSS weight decreases and the INS weight increases, ensuring that the INS can provide stable navigation data when the GNSS signal weakens. Figure 2 shows that the ANFIS model automatically adjusts the weight under different conditions, thereby improving the accuracy and robustness of the system.
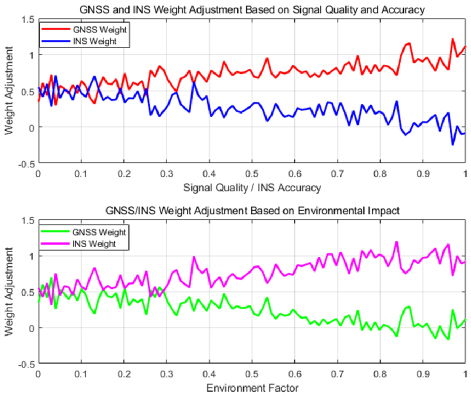
Figure 2: Dynamic adjustment of weights in the GNSS/INS coupling system.
3. Fusion strategy optimization and application
To make the fusion strategy of GNSS and INS more efficient, this paper applies a self-optimization mechanism based on ANFIS. During the experiment, the system continuously optimizes the parameters of fuzzy rules and neural networks based on real-time data and error feedback. Through continuous training and adjustment, ANFIS learns rules more suitable for the current environment and flexibly adjusts the data fusion strategy according to environmental changes. When the GNSS signal is lost or the quality is reduced, ANFIS increases the weight of INS to ensure a smooth transition of the system. Ehen the GNSS signal returns to normal, the system quickly resumes its dependence on GNSS and reduces the weight of INS.
Various error sources can be identified and targeted for adjustment during ANFIS model training. To address the multipath effect of GNSS, ANFIS adjusts the weights of the input variables to weaken their influence on localization and reinforces the role of INS in case of signal occlusion to prevent accuracy from being impaired. This optimization ensures that GNSS/INS data fusion provides stable accuracy in real-time applications while maintaining system robustness under extreme conditions.
The self-optimization mechanism using ANFIS enhances the performance of GNSS/INS coupled navigation systems in challenging environments. By integrating fuzzy logic with neural networks, ANFIS dynamically adjusts the weight between GNSS and INS data based on real-time signal quality and environmental conditions. It is trained on actual data to recognize error patterns and optimize fusion strategies. When GNSS signals are degraded or lost, ANFIS increases reliance on INS to maintain positioning accuracy. The system also continuously refines its rules using error feedback, ensuring robust and adaptive navigation. Experiments show over 90% robustness and an average processing time of 0.69 seconds, confirming the system’s effectiveness in real-world applications.
D. Dynamic adjustment mechanism
1. GNSS signal loss processing
When the GNSS signal is missing or strongly interfered with, the system quickly switches to INS mode to ensure the continuity of navigation and high positioning stability. The ANFIS model automatically increases the weight of INS through its flexible weight adjustment mechanism, thereby ensuring that INS can continue to play a core role when GNSS is unavailable. ANFIS continuously monitors the GNSS signal strength and the number of available satellites, and immediately and adaptively increases the weight of INS once a signal loss is detected. With INS’s continuous position estimation capability, this mechanism prevents the deviation of positioning information.
Furthermore, ANFIS optimizes the INS error correction strategy tasks to maintain high positioning accuracy. As the operating time of INS grows, its positioning accuracy may gradually decrease. For this reason, ANFIS utilizes real-time data to accurately correct the errors of INS to avoid accumulation of errors. ANFIS implements effective error compensation in response to environmental changes by dynamically adjusting the parameters of the accelerometers and gyroscopes, ensuring that the system maintains high accuracy during periods of GNSS signal loss. This mechanism allows the system to quickly adapt to changes in the external environment and reduces the reliance on static weight configurations.
ANFIS enhances robustness in GNSS environments facing signal loss or multipath interference by integrating mechanisms that evaluate signal strength, satellite geometry, and multipath indicators. It adjusts fusion weights between GNSS and INS data dynamically, relying more on INS when GNSS quality declines. By combining fuzzy logic with neural networks, ANFIS optimizes rules and functions through real-world data training, facilitating real-time adaptation to environmental changes. It constructs detailed error models for both GNSS and INS to correctly identify and mitigate inaccuracies in harsh conditions. In practice, ANFIS lowers GNSS dependence during interference while improving INS compensation, swiftly reverting to GNSS when conditions stabilize, achieving over 90% robustness in challenging scenarios like urban canyons and tunnels. The GNSS/INS coupled navigation system utilizes ANFIS to maintain accuracy during GNSS signal loss or interference. It begins with dynamic error modeling addressing atmospheric delays, satellite geometry, multipath effects, and INS sensor drift. Real-time corrections use environmental data. The fusion strategy adapts GNSS weight based on signal conditions, enhancing GNSS during strong signals and relying on INS when GNSS degrades. ANFIS combines fuzzy logic for uncertainty management and neural networks for optimizing fuzzy rules. Continuous monitoring of GNSS parameters assesses signal reliability. In outages, it compensates for INS drift with adaptive calibration, achieving over 90% robustness and low positioning errors with a 0.69-second execution time.
2. Signal quality judgment and dynamic adjustment
ANFIS measures signal reliability by monitoring signal-to-noise ratio, satellite spatial distribution, and multipath effects.
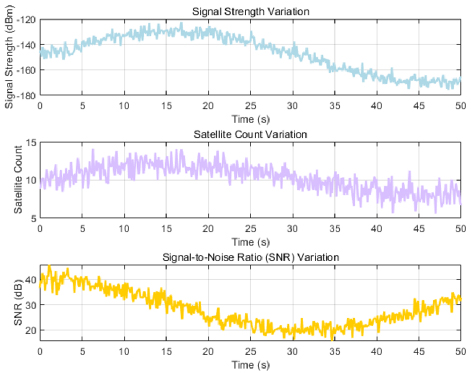
Figure 3: Signal strength, number of satellites, and signal-to-noise ratio over time.
Figure 3 shows that the signal strength fluctuates between -180 dBm and -120 dBm. The number of satellites varies between 5 and 15, with lower numbers of satellites leading to reduced positioning accuracy. The SNR value is in the fluctuating range of 0-50 dB. A higher SNR corresponds to better localization accuracy, while a lower SNR may lead to an increased error. The fluctuation of GNSS signal quality directly affects the accuracy and stability of the positioning system.
ANFIS uses fuzzy logic to evaluate GNSS signal quality, uses input variables to determine signal reliability, and dynamically adjusts data fusion strategies based on the evaluation results. If the signal quality is low, ANFIS relies on INS to provide continuous positioning information and gradually reduce its reliance on GNSS data. When the signal returns to normal, ANFIS increases its reliance on GNSS data and further optimizes the positioning results. This mechanism ensures that the system is adaptively adjusted according to actual circumstances under various environmental conditions to maximize the accuracy and stability of the navigation system.
ANFIS enhances GNSS/INS navigation by adaptively adjusting fuzzy logic rules, neural network parameters, and data fusion strategies in real time. It uses environmental inputs like signal strength and sensor errors to determine optimal GNSS and INS weightings, increasing reliance on INS during GNSS signal loss. A neural network continuously learns and optimizes the fuzzy system for improved adaptability. This dynamic approach ensures accurate, stable navigation by compensating for errors such as multipath effects and sensor drift. ANFIS achieves over 90% robustness in harsh conditions, while maintaining fast processing, making it suitable for real-time navigation in complex environments.
IV. EXPERIMENT AND PERFORMANCE EVALUATION
A. Performance evaluation method
In the performance evaluation, this paper simulates the lateral and longitudinal errors of complex environments such as urban high-rise buildings and tunnels under different geographical conditions by using actual GNSS and INS sensor data sets and the stability and robustness of experimental scenes under various harsh conditions. The performance of the ANFIS optimization algorithm under these harsh conditions is tested through these experimental data. To comprehensively evaluate the performance of the ANFIS algorithm, this study conducts a comparative analysis with traditional EKF and UKF.
B. Positioning error
This paper evaluates the algorithm’s accuracy by calculating the positioning error (lateral error and longitudinal error).
Figure 4 shows the error performance of ANFIS, EKF, and UKF in various geographical environments. ANFIS has the best performance in open areas, with lateral and longitudinal errors of 0.66 meters and 0.65 meters, respectively. In complex environments, such as urban canyons and tunnels, ANFIS error is still low, while the errors of EKF and UKF increase, especially in tunnels where the lateral error of EKF exceeds 0.9 meters. Overall, ANFIS shows high accuracy and stability, highlighting its advantages in complex environments.
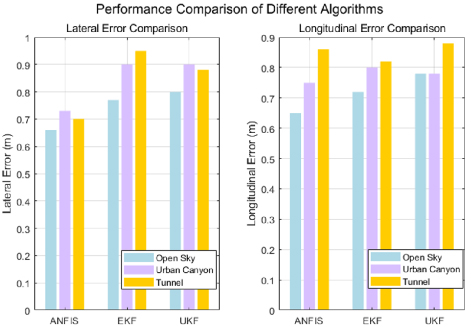
Figure 4: Lateral and longitudinal errors of the three algorithms ANFIS, EKF, and UKF in different geographical environments.
C. Robustness in different harsh scenarios
To comprehensively evaluate the performance of the GNSS/INS coupled navigation algorithm of ANFIS in harsh environments, this paper designs a variety of experimental scenarios, covering signal loss, multipath interference, and high dynamic environments. Table 2 shows the system’s positioning error, stability, and robustness indicators in these scenarios. The robustness and stability of the algorithm in complex environments are further confirmed through comparative verification.
Table 2: Positioning error, stability, and robustness of the system under various harsh conditions
| Environmental Condition | Positioning Error (m) | System Stability (Maximum Deviation, m) | Robustness (Stability Score) |
| Normal GNSS Signal | 0.5 | 0.2 | 95% |
| GNSS Signal Loss | 1.2 | 0.5 | 90.5% |
| Multipath Interference | 0.8 | 0.3 | 90.6% |
| High-Dynamics Environment | 1.5 | 0.6 | 91% |
| Strong Electromagnetic Interference | 1 | 0.4 | 94% |
| Short-Term Signal Interference | 0.7 | 0.25 | 92% |
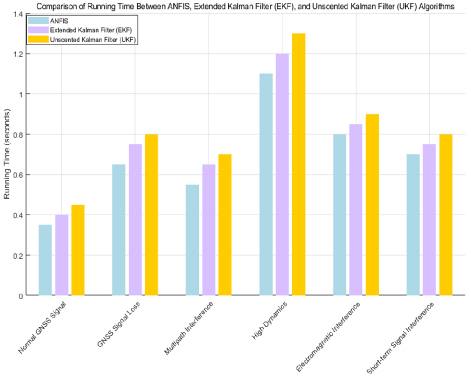
Figure 5: Running time of the three algorithms in different environments.
Under normal GNSS signals, the positioning error is 0.5 meters, the system stability is good, and the robustness is as high as 95%. However, when the GNSS signal is lost, the positioning error increases to 1.2 meters, and the system stability and robustness decrease slightly. In the face of multipath interference, the positioning error is 0.8 meters and the robustness is 90.6%. Overall, the robustness in each environment is higher than 90%.
D. Algorithm running time
By evaluating the algorithm running time, its computational burden is compared with the performance difference of EKF and UKF.
Figure 5 compares the execution time of ANFIS, EKF, and UKF in different environments. In the GNSS signal loss scenario, ANFIS outperforms EKF’s 0.75 seconds and UKF’s 0.80 seconds with a running time of 0.65 seconds, demonstrating its fast-processing capability. In the face of multipath interference, ANFIS’s 0.55-second running time takes the lead again, demonstrating excellent robustness. In a highly dynamic environment, UKF takes the longest time (1.30 seconds), while ANFIS (1.10 seconds) and EKF (1.20 seconds) are shorter, highlighting that UKF is computationally intensive. Overall, ANFIS has good adaptability under complex conditions, with an average running time of 0.69 seconds.
V. CONCLUSION
This study presents a novel ANFIS-based GNSS/INS coupled navigation algorithm that substantially improves positioning accuracy and system robustness in challenging environments characterized by GNSS signal loss, multipath interference, and dynamic conditions. By integrating a detailed error source model with a real-time adaptive fusion strategy, the system effectively adjusts the weighting between GNSS and INS inputs, ensuring continuous and reliable navigation even when satellite signals are degraded or unavailable. The self-optimizing inference engine further enhances performance by dynamically evolving fuzzy rules based on sensor feedback and environmental changes. Experimental results demonstrate that the proposed approach consistently achieves over 90% robustness with significantly reduced positioning errors compared to traditional EKF and UKF, while maintaining low computational latency suitable for real-time applications. These advancements highlight the ANFIS-based fusion method as a superior alternative, offering enhanced stability, adaptability, and accuracy in GNSS-challenged scenarios.
DECLARATIONS
Funding: Research on Key Technologies of Transmission line condition Monitoring Based on Multi-Source Data Fusion based on Beidou high-precision Positioning Technology supported by China Southern Power Grid Co. Ltd. (GZKJXM20222325)
Conflict of interests: Authors do not have any conflicts.
Data Availability Statement: No datasets were generated or analyzed during the current study.
Code availability: Not applicable.
Authors’ Contributions: Chen Zerui, Xiao Yanhong, and Wu Xin are responsible for designing the framework, analyzing performance, validating the results, and writing the article. Hu Houpeng, Xiao Jian, Yang Shang, and Gao Zhenghao are responsible for collecting the information required for the framework, providing software, conducting critical reviews, and administering the process.
REFERENCES
[1] E. S. Abdolkarimi and M. R. Mosavi, “A modified neuro-fuzzy system for accuracy improvement of low-cost MEMS-based INS/GPS navigation system,” Wirel. Pers. Commun., vol. 129, no. 2, pp. 1369-1392, 2023.
[2] L. Cong, S. Yue, H. Qin, B. Li, and J. Yao, “Implementation of a MEMS-based GNSS/INS integrated scheme using supported vector machine for land vehicle navigation,” IEEE Sensors J., vol. 20, no. 23, pp. 14423-14435, 2020.
[3] Y. Xiao, H. Luo, F. Zhao, F. Wu, X. Gao, Q. Wang, and L. Cui, “Residual attention network-based confidence estimation algorithm for non-holonomic constraint in GNSS/INS integrated navigation system,” IEEE Trans. Veh. Technol., vol. 70, no. 11, pp. 11404-11418, 2021.
[4] R. Sun, G. Wang, Z. Fan, T. Xu, and W. Y. Ochieng, “An integrated urban positioning algorithm using matching, particle swarm optimized adaptive neuro fuzzy inference system and a spatial city model,” IEEE Trans. Veh. Technol., vol. 69, no. 5, pp. 4842-4854, 2020.
[5] E. S. Abdolkarimi and M. R. Mosavi, “Impact assessment of efficient denoising techniques in AI-based low-cost INS/GPS integration during blockage of GPS satellites,” Arab J. Sci. Eng., vol. 47, no. 11, pp. 14583-14600, 2022.
[6] W. Jiang, Y. Yu, K. Zong, B. Cai, C. Rizos, J. Wang, S. Shangguan, and W. Shangguan, “A seamless train positioning system using a LiDAR-aided hybrid integration methodology,” IEEE Trans. Veh. Technol., vol. 70, no. 7, pp. 6371-6384,2021.
[7] Y. Yuan, Y. Wang, W. Gao, and F. Shen, “Vehicular relative positioning with measurement outliers and GNSS outages,” IEEE Sensors J., vol. 23, no. 8, pp. 8556-8567, 2023.
[8] Y. Li, R. Chen, X. Niu, Y. Zhuang, Z. Gao, X. Hu, and N. El-Sheimy, “Inertial sensing meets machine learning: Opportunity or challenge?” IEEE Trans. Intell. Transp. Syst., vol. 23, no. 8, pp. 9995-10011, 2021.
[9] B. Zhu, X. Tao, J. Zhao, M. Ke, H. Wang, and W. Deng, “An integrated GNSS/UWB/DR/VMM positioning strategy for intelligent vehicles,” IEEE Trans. Veh. Technol., vol. 69, no. 10, pp. 10842-10853, 2020.
[10] M. N. Cahyadi, T. Asfihani, H. F. Suhandri, and R. Erfianti, “Unscented Kalman filter for a low-cost GNSS/IMU-based mobile mapping application under demanding conditions,” Geodesy Geodyn., vol. 15, no. 2, pp. 166-176, 2024.
[11] C. Zhang, X. Zhao, C. Pang, Y. Wang, L. Zhang, and B. Feng, “Improved fault detection method based on robust estimation and sliding window test for INS/GNSS integration,” J. Navig., vol. 73, no. 4, pp. 776-796, 2020.
[12] A. Siemuri, K. Selvan, H. Kuusniemi, P. Valisuo, and M. S. Elmusrati, “A systematic review of machine learning techniques for GNSS use cases,” IEEE Trans. Aerosp. Electron. Syst., vol. 58, no. 6, pp. 5043-5077, 2022.
[13] J. Wu, “An innovative neural-fuzzy adaptive Kalman filter for ultra-tightly-coupled GPS/INS integrated system,” in AOPC 2017: Space Optics and Earth Imaging and Space Navigation, vol. 10463, pp. 75-80, Oct. 2017.
[14] X. Lai, S. Tong, and G. Zhu, “Adaptive fuzzy neural network-aided progressive Gaussian approximate filter for GPS/INS integration navigation,” Measurement, vol. 200, p. 111641, 2022.
[15] S. Yue, L. Cong, H. Qin, B. Li, and J. Yao, “A robust fusion methodology for MEMS-based land vehicle navigation in GNSS-challenged environments,” IEEE Access, vol. 8, pp. 44087-44099, 2020.
[16] G. Wang, Y. Han, J. Chen, S. Wang, Z. Zhang, N. Du, and Y. Zheng, “A GNSS/INS integrated navigation algorithm based on Kalman filter,” IFAC-PapersOnLine, vol. 51, no. 17, pp. 232-237, 2018.
[17] A. E. Mahdi, A. Azouz, A. Noureldin, and A. Abosekeen, “A novel machine learning-based ANFIS calibrated RISS/GNSS integration for improved navigation in urban environments,” Sensors, vol. 24, no. 6, p. 1985, 2024.
[18] D. Wang, Y. Dong, Z. Li, Q. Li, and J. Wu, “Constrained MEMS-based GNSS/INS tightly-coupled system with robust Kalman filter for accurate land vehicular navigation,” IEEE Trans. Instrum. Meas., vol. 69, no. 7, pp. 5138-5148, 2019.
[19] B. R. Gudivaka and M. Thanjaivadivel, “IoT-driven signal processing for enhanced robotic navigation systems,” Int. J. Eng. Technol. Res. Manag., vol. 4, no. 5, 2020.
[20] R. Sun, D. Xue, and Y. Zhang, “Rear-end collision detection based on GNSS/compass fusion and adaptive neuro fuzzy inference system,” in 2017 Forum on Cooperative Positioning and Service (CPGPS), pp. 273-277, May 2017.
[21] H. Zhao and Z. Yang, “A novel fault detection and exclusion method for applying low-cost INS/GNSS integrated navigation system in urban environments,” IEEE Trans. Intell. Transp. Syst., vol. 26, pp. 143-156, 2024.
[22] D. J. Jwo, A. Biswal, and I. A. Mir, “Artificial neural networks for navigation systems: A review of recent research,” Appl. Sci., vol. 13, no. 7, p. 4475, 2023.
[23] F. Wu, H. Luo, F. Zhao, L. Wei, and B. Zhou, “Optimizing GNSS/INS integrated navigation: A deep learning approach for error compensation,” IEEE Signal Process. Lett., vol. 31, pp. 3104-3108,2024.
[24] Y. Zhang and L. Wang, “A hybrid intelligent algorithm DGP-MLP for GNSS/INS integration during GNSS outages,” J. Navig., vol. 72, no. 2, pp. 375-388, 2019.
[25] C. Guo and W. Tu, “A novel self-learning GNSS/INS integrated navigation method,” in Proc. 34th Int. Tech. Meeting Satellite Div. Inst. Navig. (ION GNSS+), pp. 168-179, Sep. 2021.
BIOGRAPHIES

Chen Zerui received his M.E. degree in Computer Science and Technology from Guizhou University, China, in 2018. He currently works at the Power Science Research Institute of Guizhou Power Grid Co. Ltd. His research interests include algorithmic game theory, blockchain, information security, and AI security.

Xiao Jian , born in 1993, is currently an Engineer at the Electric Power Research Institute, Guizhou Power Grid Company Ltd., Guiyang, China. He received his Ph.D. in Information and Communication Engineering from Harbin Engineering University. His research interests include power artificial intelligence and power big data analytics.

Yang Shang was born in 1997 in Tianzhu, Guizhou, China. He received his master’s degree from North China Electric Power University and is currently working at China Southern Power Grid Company Limited. His research interests include communication technology, artificial intelligence, and big data analysis.

Hu Houpeng was born in 1992 and is a postgraduate student. His main research direction is electric vehicle charging and replacement technology.

Gao Zhenghao , male, born August 1979, is a senior engineer. He graduated in 2002 from the Department of Computer Science at Guizhou University, China, majoring in Computer Applications. Since July 2002, he has been working at the IoT Application Technology Research Center of the Electric Power Research Institute, focusing on information technology, power monitoring system development, network security, and communication technology research.

Wu Xin, born October 1976, is an engineer at the Electric Power Science and Technology Research Institute of Guizhou Power Grid Co. Ltd. He holds a bachelor’s degree and is of Han nationality, originally from Jinhua, Zhejiang. His research interests include information technology and big data applications.

Xiao Yanhong , born April 1976, is a senior engineer at the Electric Power Science Research Institute of Guizhou Power Grid Co. Ltd. She is of Han nationality and originally from Fuquan, Guizhou, China. Her research interests include network security testing and online monitoring technology for power grids.
ACES JOURNAL, Vol. 40, No. 8, 755–766
doi: 10.13052/2024.ACES.J.400808
© 2025 River Publishers