Stability Enhancement of PV Powered Microgrid using Levenberg-Marquardt Algorithm Based Intelligent Controller Under Grid-connected Mode
Anantha Krishnan Venkatesan and Senthil Kumar Natarajan*
SELECT, Vellore Institute of Technology, Chennai, Tamil Nadu, India
E-mail: ananthakrishnan.v@vit.ac.in; senthilkumar.nataraj@vit.ac.in
*Corresponding Author
Received 14 June 2021; Accepted 31 August 2021; Publication 09 November 2021
Abstract
An effective and robust controller is designed using Levenberg-Marquardt (LM) algorithm-based Artificial Neural Network (ANN) for the solar Photo-Voltaic (PV) based distributed generation units for stabilizing the grid-connected microgrid (MG) under load changes and irradiance variations. A test system comprising of two PV units and one diesel generator unit connected to the utility grid is modelled and considered for the controller design in MATLAB/Simulink environment. PV generated power is injected into the grid through voltage source converter (VSC) regulated by using the proposed ANN controller. Based on the grid voltage and available PV generation, the ANN controller regulates the inverter current by setting the reference voltage vector to synthesize gating pulses for the inverter. The robustness of the controller design is analysed and validated through time-domain simulations by subjecting it to extreme operating conditions. The controller performance is evaluated by Integral Square Error (ISE) and Integral Time Absolute Error (ITAE) for the test system. The results are compared with conventional PI and PID controllers to prove the superior performing ANN controller.
Keywords: Stability of microgrid, LM-algorithm, ANN controller, voltage source converter, time-domain simulation, power-flow regulation.
1 Introduction
In recent years, there has been a revival of interest in many electric utilities throughout the world to generate power from renewable energy sources like solar, wind, biomass, etc. These renewable power sources along with energy storage systems can be integrated with low voltage distribution networks which are called distributed energy sources (DER).
The important aspects of stability are presented in remote and utility-based microgrids depending on the modes of operation, types of sources, and network parameters [1]. A damping controller is proposed for a PV source coupled microgrid system for robust system performance including sudden disturbances and variation in operating conditions [2]. A distributed optimal controller is presented to enhance the dynamic performance of the system in coordination with multiple distribution units in the microgrid which enhances the performance under various working conditions within its range [3]. PI current/power regulators are designed suitably to stabilize a hybrid AC/DC microgrid system incorporating following step changes in the dynamic and static loads [4]. An adaptive feedforward strategy is proposed to alter the dynamic coupling between the distributed resource unit and utility grid so that the system stability is made insensitive by droop coefficients [5]. The dynamic stability of microgrid is influenced by system configuration and variable intermittent generation. Controlled energy storage is essential for the reliable operation of the microgrid as well as the utilization of renewable energy [6].
A neuro-fuzzy controller is recommended for smooth operation for the hybrid microgrid retaining the stability of the system in isolated mode and obtain good performance in grid-connected mode [7]. An intelligent controller with a combination of modified general regression neural network and radial basis function network sliding mode is proposed for the stabilization of the grid-connected microgrid system [8]. A Neural sliding mode linearization controller trained with an extended Kalman filter learning algorithm is proposed for active and reactive power regulation of distributed energy resource in microgrid interconnected IEEE nine bus system [9]. An online training-based Elman NN controller is employed to track the PV source operating point [10]. The power transferred to the utility grid by the converter is controlled by a neural sliding mode linearization controller utilizing recurrent high order neural network with an extended Kalman filter to ensure the stability, robustness, and reject the disturbances [11]. An adaptive radial basis function neural network is used to tune the parameters of a PID controller connected to a PV based energy system [12].
A cascaded control structure is proposed with nonlinear simplex-based algorithm for the optimal tuning of control parameter. This minimizes the voltage deviation in the microgrid and also enables single transition state in microgrid [13]. Genetic algorithm is implemented for multi objective optimization in an adaptive dynamic droop controller for stabilization of PV based multiple microgrid cluster. The controller introduces local and inter area oscillation modes to damp the underdamped oscillation behaviour in the microgrid [14].
From the above review of literature, it has been observed that ANN controller is employed for the control within the microgrid as standalone system and utilized for the optimal tuning of controller gain in islanded DC or AC microgrids. The proposed LM algorithm-based ANN is compared against conventional PI, PID controllers in the grid connected operation of a PV-Diesel test microgrid.
The proposed ANN controller is simple and effective for regulating power flow in the grid-connected microgrid enhancing the stability of the system under transient and steady-state. The ANN algorithm overcomes the inherent issues in improving transient performance and governing satisfactory power delivery to the grid during the excess generation in the microgrid and power reversal during a power deficit in the microgrid. ANN controller is inherently adaptive to various operating conditions, whereas in the conventional analog controllers, any changes in controller parameters results in modification of hardware components incurring more time and associated cost in design and components. The proposed ANN controller is designed and implemented to generate reference voltage modulation signal for VSC controller based on grid parameters without collapsing the grid under parametric changes. The stability in micro-grid here refers to the stable operation of the VSC interfacing DG sources to the utility grid. Enhancing the stability, the proposed controller also, preserves the power quality of the utility grid during transient and steady-state operation of the microgrid. The major contribution of the work lies on applying the LM algorithm for dynamic power flow control in the grid connected microgrid with changes in operating conditions The proposed ANN controller regulates the power flow outputs of the PV sources adaptively by fine tuning the VSC duty cycle in accordance with instantaneous power generation existing with other micro sources in the microgrid and irradiance changes.
This paper is organized as follows Section 1 presents the introduction and literature review, Section 2 presents the modelling details of microgrid in grid connected mode. Section 3 discusses the proposed LM-based ANN controller with its implementation in Section 4. The results of simulation are presented in Section 5 with comparison metrics with conventional controllers, and Section 6 presents the conclusion.
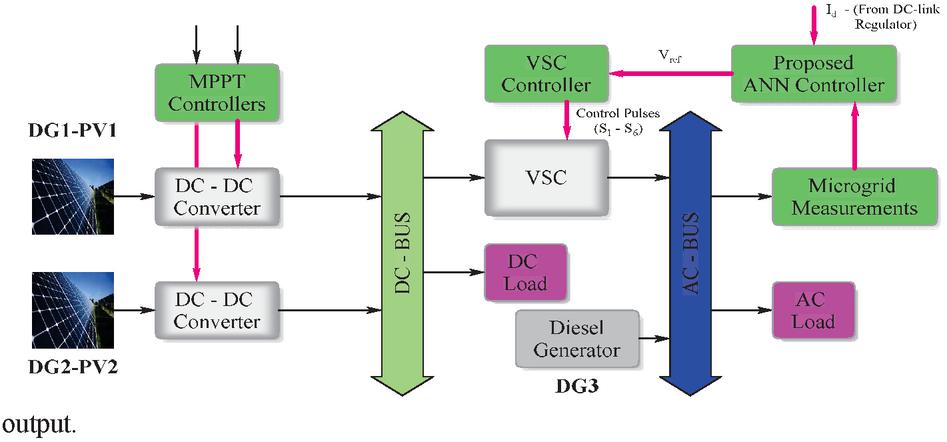
Figure 1 Schematic diagram of the PV-diesel system model.
2 Modeling of PV-Diesel Test Microgrid in Grid CONNECTED Mode
The test microgrid considered for this research work is described which comprises of two PV sources and a diesel generator unit. This microgrid is capable of operating in both islanded and grid-connected mode. Linear loads are connected to both the microgrid test system and the utility grid. The power output from the PV module is integrated into the utility grid in two stages. The power output from individual PV units is extracted using Maximum Power Point Tracking (MPPT) controlled DC-DC converter sharing common dc-link with VSC interfaced to the grid. A typical PV-diesel microgrid test system with the proposed controller is illustrated in Figure 1. The maximum power output from the PV module is utilized all the time. The diesel generator (DG) output is reliable on the total amount of delivered power according to its rating. In islanded mode of operation, the output power delivered depends on the microgrid load only [15]. All the generation units are connected through transformer to the grid. Active power is provided by the PV generation module with the VSC interface. The grid control restricts the inverter fed source by controlling the voltage on the bus. The capacitor output changes yield variations in the PV output.
ANN-based control strategy regulates the power flow in the microgrid sources by controlling VSC. It generates a set of reference current for the VSC and controls the system components according to the power balance of the system. The specifications of PV module and diesel generator parameters are discussed in this section.
2.1 Sizing of PV Module
The PV sources (DG1 and DG2) comprises of a group of panels that are connected in series and parallel to meet the voltage and current requirements for the proposed test-microgrid. SPR-315E-WHT-D panels are employed as a power source whose specification is listed in Table 1 [16].
Table 1 PV module data
| Parameters | Values |
| Total no. of Parallel strings | 64 |
| Series modules in String connected | 5 |
| Open circuit voltage V (V) | 64.6 |
| Short-circuit current I (A) | 6.14 |
| Voltage at maximum power point level V (V) | 54.7 |
| Current at maximum power point I (A) | 5.76 |
| Specified temperatures of Array @ 1000 W/m | 45C and 25C |
| Maximum Power of a PV Cell (W) | 315.072 |
| From Table 1, the available PV power output capacity is calculated as for 5 series strings * for 64 parallel strings 126.92 Kw. | |
2.2 Modelling of Diesel Generator
Use The diesel generator is considered to have a diesel engine coupled to a salient pole synchronous machine whose parameters are considered as in Table 2. The diesel engine operation is governed by a speed governor whose parameters are given in Table 3.
Table 2 Diesel generator parameters
| Parameters | Values |
| Nominal power | 200 kVA |
| line-to-line voltage | 460 V |
| Frequency | 60 Hz |
| Reactance | [1.305, 0.296, 0.252, 0.474, 0.243, |
| [X, X, X, X, X, X] | 0.18] all in p.u |
| [T, T, T] | [4.49s 0.0681s 0.0513s] |
| Resistance of the stator R (pu) | 0.0045 p.u |
| Inertia constant, friction factor, pole pairs [H(s) F(pu) p] | [3.7 0 1] |
Table 3 Diesel engine governor parameters
| Parameters | Values |
| Gain for the regulator, K | 40 |
| Time constants of regulator [T T T] (s) | [0.01 0.02 0.2] |
| Time constants of actuator [T T T] (s) | [0.25 0.009 0.0384] |
Tables 2 and 3 present the data of a diesel engine and governor system [17]. All the inputs are considered in p.u. The diesel engine output is mechanical power driving the synchronous generator. Motor inertia is considered along with the generator. The diesel generator is considered as an independent voltage source as the rotor speed control and generator voltage control is coordinated inside the system. A fixed voltage is continuously maintained which is independent of the load or the output current.
2.3 Proposed Control Law
The proposed model control law describes controlled coordination of the converters in the PV-diesel grid-connected system. The power balance of the microgrid is satisfied when the PV plant is operating in grid connected mode as well as in isolated mode. The power balance equation in the system under various loads and supply conditions are given in Equation (1).
| (1) |
Where P is the PV output power, P is the diesel generator power, P is the required load power and total power loss is considered as P in the MG. In the case of deficit power generation by PV modules, it results in DC (V) dip. The dc voltage error is processed by the PI controller and the output is the d-axis reference current (I), required to maintain the dc-link voltage fairly constant. This current I is added to the d axis current output of the inverter and then applied to the ANN controller for reference generation. The converter operates in buck mode and power is transferred from the generators to the load. In the case of excessive power generation, the DC voltage increases in the DC link and delivers a reference value for the converter control to operate in a boost mode. The power flows from the main DC-link with excessive power. The proposed ANN controller processes and regulates the power exchange based on the requirements of grid-connected PV-Diesel microgrid connected load.
3 Proposed LM-Algorithm Based ANN Controller
ANN is the heart of the intelligent controller designed for the proposed work. ANN control is online and it uses supervised learning method. It is developed by using data sets. The ANN controller receives information like grid voltage, inverter output current, and DC link reference voltage. The voltage balance in dc-link is vital for the operation of VSC and hence it is regulated using the PI controller. The d-axis reference current (I) is generated by relating the dc reference voltage and actual dc-link voltage using a comparator and PI controller. Based on the power generation from PV microgrid sources, the reference inverter output current is set and is provided as to the ANN controller. It processes and generates reference voltage command required for the VSC, in the dq-frame. The ANN focusses on regulating the power delivered to the grid from PV sources. The inputs of the PV sources are temperature and irradiation, among which the irradiation is considered as the variable at a standard constant temperature. The ANN is trained to monitor the real-time information of the system, to compute the modulating reference voltage signal required for VSC. The training data is generated by the actual behavior of system constraints. The learning task is given in the form of a training set. In this research work, the training data are generated from the best values i.e. (taken as Current parameter: I, I) and (taken as Voltage parameter V).
The Backpropagation (BP) training algorithm and LM algorithm [18] are used in the network to train the dataset in the microgrid stability enhancement. The feedforward network is trained by the BP algorithm to train the ANN controller to get the optimum and best result as shown in Figure 2. The optimum and best result is achieved by training the feedforward ANN control network using BP algorithm.
A network with connections between nodes model is used and the node does not form a cycle known as the feedforward model. The minimum value of a function is located in the LM algorithm. The sum of squares of non-linear functions is expressed by the iterative technique. A combination of the Gauss-Newton method and the steepest descent method is used according to the combination coefficient. Gauss-Newton method is used when the combination coefficient has a very small value. The steepest descent method is also used when the combination coefficient is large.
The output node of neuron j is calculated using
| (2) |
Where y is the output vector , f is the activation function of neuron j and net value net is the sum of weighted input nodes of neuron j:
| (3) |
Where
Y is the i input node of neuron j, weighted by w
w is the bias weight of neuron j obtained by tuning and updation in iterative procedure.
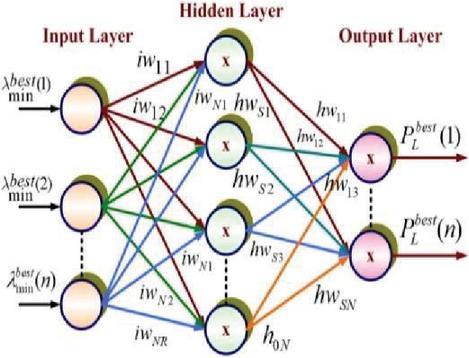
Figure 2 Structure of feedforward neural network.
Based on the output obtained from the network, the optimal control pulses are generated for the voltage source converter based on the grid parameter variations. Then the proposed topology is implemented in the MATLAB platform and the results were analyzed. The training data set for the proposed ANN control strategy results in the least mean square error of 0.025684 and regression value of 0.98163 close to 1.
ANN technique employed here is trained with a set of all possible data combination and contingencies that may arise in a microgrid that affects the steady state operation of the connected grid/loads. ANN is relatively simpler and faster techniques when compared to other computational algorithms to determine the duty cycle for the power switches. In this work, the ANN controller is trained with better estimates of duty cycle that the VSC must operate under normal and abnormal conditions. Hence it is not required to compute or tune the controller parameters as in conventional or other controllers. There may be recent techniques that perform satisfactorily or mere enhancement in the performance of the system. The objective is to propose an ANN controller that requires minimal computation for obtaining appropriate duty cycle for the VSC.
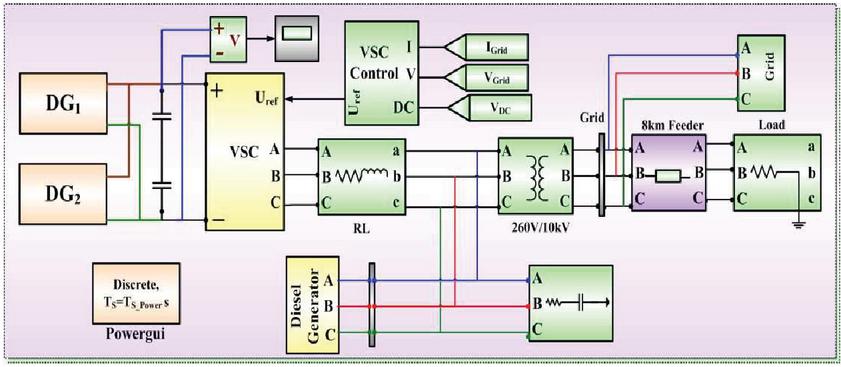
Figure 3 Simulink model of the proposed system.
4 Implementation of the Proposed Controller in Simulink
The Simulink model of the test system is illustrated in Figure 3 and the structure of ANN-based VSC control and the process of generating a reference signal by the ANN-based current regulator from the measurements is shown in Figure 4a. Figure 4b is the expanded form of the ANN controller block in Figure 4a. According to the dq-control strategy, the error in dc-link voltage is regulated to deliver the desired charging current to maintain constant dc-link voltage. The ANN controller regulates the current delivered to the inverter based on available power output from PV and grid voltage. Also, it regulates the dc-link voltage.
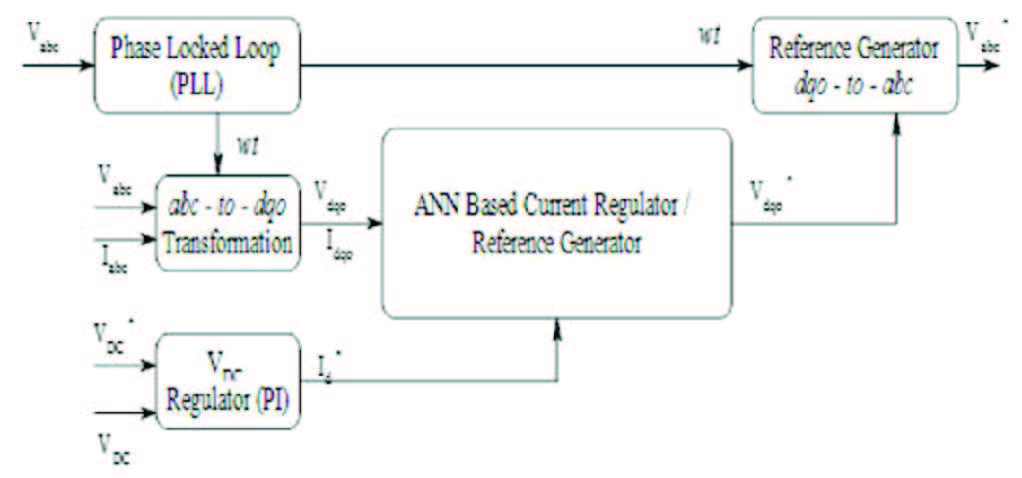
Figure 4a VSC control block.
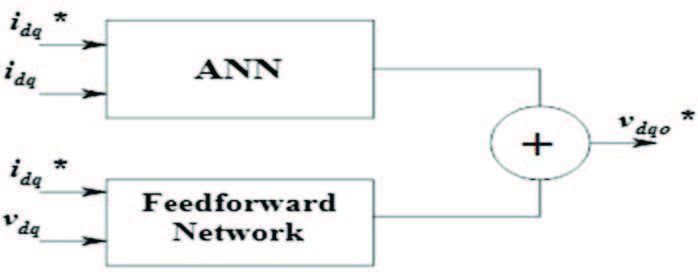
Figure 4b ANN-based current regulator.
Table 4 Parameters of the test-microgrid
| Parameters | Values |
| DG-1 (PV-1) | 115 kW |
| DG-2 (PV-2) | 130 kW |
| DG-3 (DG set) | 145 kW |
| LC filter | L mH, C F |
| Transformer | 260/10 kV, 0.4 MVA |
| Installed capacity of microgrid | 390 kW |
| Utility grid capacity (Short Circuit MVA) | 2500 MVA |
The control of VSC is carried out in the dq frame. It produces a reference output voltage for the inverter in dq-frame. Applying inverse park transformation, the synthesized reference voltage () in dq-frame is transformed into time domain reference (). The reference in the dqo frame generated by ANN is transformed back to abc frame and is used as modulation signal for VSC.
The proposed ANN controller model is tested and analyzed under two test cases: At constant irradiance by varying load and by varying irradiance at constant load. Furthermore, the system is simulated with PI and PID controllers for comparative analysis of the proposed controller. The parameters of the test-microgrid system considered for analysis are given in Table 4.
5 Simulation Results of the System with Proposed Controller
To prove the effectiveness of the proposed controller against the conventional controller, two cases are considered to analyze the performance of the ANN controller. The case depends on the irradiance changes of the solar power for PV generation and the controller performance is compared with the conventional controller like PI, PID controller. From the grid side, the disturbance is created in terms of an increase or decrease of a load.
5.1 Constant Irradiance Input to PV at Varying Load
The irradiance input of DG1 and DG2 are constant at 1200 W/m. The pulse is controlled based on the reference voltage and the output voltage of the grid-connected PV-Diesel microgrid system. It is observed that PV generators, diesel generator, and output voltage of the system are measured from the simulation results based on the load variation in the dc-link and ac load variation in the grid. The output power of the DG1 and DG2 is illustrated in Figure 5. A load is connected in the DC link and switched on after 0.4 seconds along with the addition of load in the grid side from 0.4 seconds to 0.8 seconds creating momentary disturbance in the system.
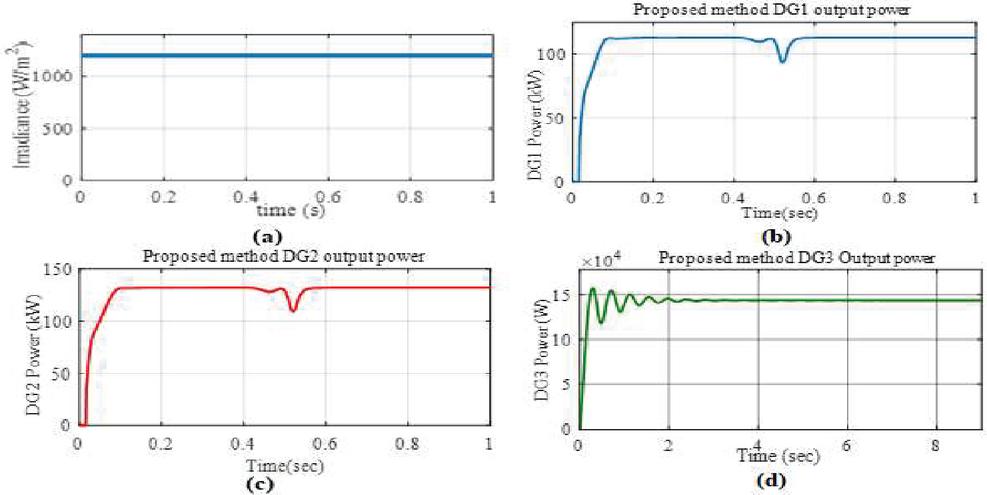
Figure 5 Proposed ANN controller performance of PV module in case 1 (a) Irradiance level, (b) DG1 output power (c) DG2 output power (d) Output power of DG3.
5.2 Varying Irradiance Input to PV at Constant Load
The proposed controller performance is evaluated based on the asymmetrical irradiance variation of the PV generator from 0.2 to 0.6 seconds and without load variations. The irradiance is varied at a constant rate from 1200 W/m to 600 W/m and back to 1200 W/m for both PV sources. The combined output power from the PV source fluctuates between 0.2 to 0.6 seconds. The output power of the MG connected system is improved based on the generated power of DG1, DG2, and DG3. When PV power output goes low the ANN controller connected to the VSC takes care for stabilizing the output.
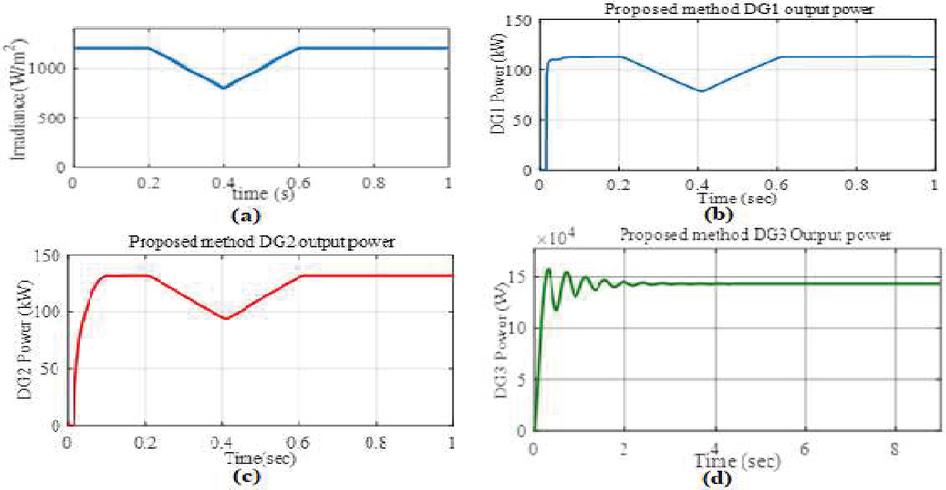
Figure 6 Proposed ANN controller performance for PV module in case 2 (a) irradiance, (b) DG1 output power (c) DG2 output power (d) DG3 output power.
The proposed ANN controller regulates power output of DG1 and DG2, and maintains constant output with minimal disturbance. The combined output of the DG1 and DG2 remains fairly constant after small load increase and decrease. The ANN controller continuously regulates the VSC until it stabilizes on either case of disturbances it is subjected to, without loss in its stability. The output power of DG1 and DG2 along with the irradiance is presented in Figure 6, which illustrates the estimated output power under Case-2.
5.3 Comparative Analysis of Proposed Controller with Conventional Controllers
In this section, the performance proposed controller is compared with the conventional controller (PI and PID controller) in terms of power output from the individual sources before and after disturbances. In case-1, a load is switched on in the DC-link from 0.4 seconds and another load is switched on in the grid side from 0.4 to 0.8 seconds. The proposed controller regulates the power flow and enhances the stability of the microgrid in the duration less than a cycle period of the supply voltage. On the other hand, for the same disturbance conventional PI and PID controllers regulates the power flow in one second.
Also, the power/voltage oscillations are sustained in conventional controllers in comparison with the proposed ANN regulator. The real power oscillations are damped and greatly minimized to 50% in comparison to conventional controllers. Hence it is proved that the performance of the proposed controller is superior than other conventional controllers. The zoomed image for the period 0.4 to 0.65 seconds is shown in Figures 7(a) and 7(b) respectively which shows the significant difference in the controller performance. The proposed controller improves the stability of the microgrid system with the help of the controlling parameters of the grid-connected PV-Diesel microgrid MG connected load system. The proposed controller also marginally enhances the output power performance with 2% to 4% in DG3 which is a mere sharing of load and not direct performance enhancement. The diesel generator has a speed governor, which senses the grid voltage, power and regulates the voltage and speed accordingly. The performance characteristics are shown in Figure 7(c) when compared with the conventional controller.
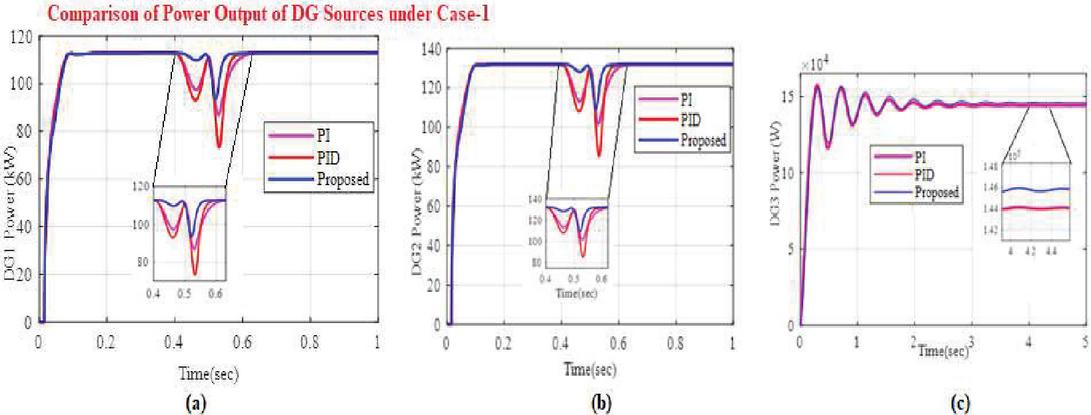
Figure 7 Comparative analysis of output (a) power of DG1 in case 1 (b) power of DG2 in case 1 (c) power of DG3 in case 1.
The comparative analysis of case 2 is shown in Figures 8(a) and 8(b) for PV sources. Case-2 depicts the irradiance variation for DG1 and DG2. The improvement of stability in the proposed controller is explicit for the irradiance variation between 0.2 sec to 0.6 sec. The proposed controller provides a faster response of 39 cycles of operation or 0.6 seconds compared to PI and PID controller and minimizes the power oscillations by 5% to 10% to improve the output power. The proposed controller reduces the voltage oscillations and the comparative analysis shows the better performance of the proposed controller in power output of DG1 and DG2 during irradiance change. The proposed controller also marginally enhances the output power performance with 2% to 4% in DG3 as similar to the previous case as shown in Figure 8c when compared to the conventional controller.
The proposed controller increases the availability of power injected to the grid with negligible variations whereas the PI controller introduces large power oscillations by 50% in DG and DG under dynamic conditions. The performance of PID controller is appreciable but under steady-state, the power injected into the grid by DG and DG is 5 to 10% less than the PI controller. The diesel generator is considered as an auxiliary source of generation. In real-time, DG3 will supply the load in the absence of grid power or storage system failure from PV array. The generation control of DG3 is based on a demand requirement that exceeds the installed capacity of DG1 and DG2. Hence from Figure 8, the superior performance of the proposed ANN controller based on time-domain simulation is proved against conventional PI and PID controllers.
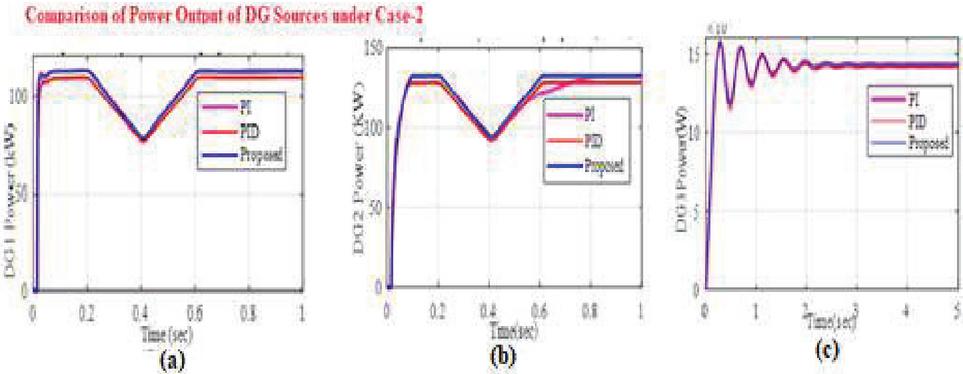
Figure 8 Comparative analysis of Case-2 for (a) Output power of DG1 (b) Output power of DG2 (c) Output power of DG-3 (d) Grid voltage.
5.4 Performance Metrics for the Proposed ANN Controller
Integral square error (ISE) and Integral time absolute error (ITAE) for the proposed controller is compared with the conventional PI and PID controllers. VSC controller parameters V and V are considered for the calculation. The results of the comparison are tabulated in Table 5 for ISE and Table 6 for ITAE respectively. The calculated metrics of the controller from the tables show that the proposed ANN controller performs better than the conventional PI and PID controller for both the test cases.
Table 5 Comparison of ISE for case-1 and case-2
| ISE (Case-1) | ISE (Case-2) | |||
| Controller | V | V | V | V |
| Proposed | 13.2081 | 2.7640 | 9.5863 | 3.2507 |
| PI | 14.7288 | 3.0682 | 11.2387 | 3.6640 |
| PID | 13.2677 | 3.1999 | 41.2562 | 3.5857 |
Table 6 Comparison of ITAE for case-1 and case-2
| ITAE (Case-1) | ITAE (Case-2) | |||
| Controller | V | V | V | V |
| Proposed | 2.5089 | 1.2515 | 2.0661 | 1.3426 |
| PI | 2.6400 | 1.3459 | 2.3939 | 1.4656 |
| PID | 2.5709 | 1.3752 | 4.3698 | 1.4548 |
The measures ISE and ITAE are considered and are a measure of the controller’s performance under transient state and steady-state respectively. For better transient performance, the controller must be tuned for ISE and ITAE for better steady-state performance. The minimum values of these parameters reflect better performance and hence, it is concluded that the proposed ANN controller performs better than the PI and PID controller considered in the test-microgrid.
6 Conclusion
In this paper, the LM algorithm-based ANN controller is implemented to improve the stability of grid-connected PV-Diesel test-test microgrid under load changes and irradiance variation. The output of the PV power sources is unpredictable and it varies rapidly. Hence the presence of PV results in power oscillations leading to unstable operation in grid connected mode. If the microgrid structure changes due to the addition of new wind generation unit or additional PV inputs, the proposed ANN controller required to train and develop it will be easier when compared to conventional PI and PID controller. The proposed controller enhances the capability to extract the maximum available power from the renewable sources under various input conditions, while compared to existing/conventional controllers. Also the proposed controller enhances the stability of the microgrid by maintaining the VSC control with stringent limits in its operation. Hence any disturbance either from the PV source or from the load side is effectively handled without affecting the microgrid and other connected loads which is based on the proposed ANN controller training dataset. Based on the results for the various test cases, the proposed ANN controller was observed to be an effective and better performing controller compared with conventional PI and PID controller. The load in the test-microgrid is supplied by a diesel generator and ANN controlled PV source.. The controller performance is evaluated based on the metrics ISE and ITAE in this work. The minimum value of these indices compared with PI and PID controllers gives the justification in support of the proposed ANN controller. Hence along with the time response parameters, the proposed ANN controller is proved to be effective and efficient. The proposed ANN controller overcomes the drawback of dynamic conditions of PI and steady-state error of the PID controller simultaneously and performs superior under both steady-state and transient conditions. The objective of injecting power to the grid at the unity power factor from the PV source is achieved through ANN controlled VSC maintaining the grid standards under all test operating conditions is achieved.
References
[1] Ritwik Majumder, “Some Aspects of Stability in Microgrids”, IEEE transactions on power systems, vol. 28, No. 3, pp. 3243–3252, Aug. 2013.
[2] Zhuoli Zhao, Ping Yang, Zhirong Xu and Joseph M. Guerrero, “Dynamic Characteristics Analysis and Stabilization of PV-Based Multiple Microgrid Clusters”, IEEE transactions on smart grid, vol. 10, No. 1, pp. 805–818, Jan. 2019.
[3] Xiangyu Wu, and Chen Shen, “Distributed Optimal Control for Stability Enhancement of Microgrids with Multiple Distributed Generators”, IEEE transactions on power system, vol. 32, No. 5, pp. 4045–4059, Sep. 2017.
[4] Moudud Ahmed, Arash Vahidnia, Lasantha Meegahapola, and Manoj Datta, “Small Signal Stability Analysis of a Hybrid AC/DC Microgrid with Static and Dynamic Loads”, IEEE Australasian Universities Power engineering conference, 2017.
[5] Mohammad B. Delghavi and Amirnaser Yazdani, “An Adaptive Feedforward Compensation for Stability Enhancement in Droop-Controlled Inverter-Based Microgrids”, IEEE transactions on power delivery, vol. 26, No. 3, pp. 1764–1773, July 2011.
[6] Xisheng Tang, Wei Deng, and Zhiping Qi, “Investigation of the Dynamic stability of microgrid”, IEEE transactions on Power systems, vol. 29, No. 2, pp. 698–706, 2014.
[7] P.C. Sekhar, Sukumar Mishra, Rishi Sharma, “Data analytics based neuro-fuzzy controller for diesel-photovoltaic hybrid AC microgrid”, IET Generation, Transmission & Distribution, Special Issue on Sensors and Data Analytics for Smart Grid Infrastructure, IET Generation Transmission Distribution, vol. 9, no. 2, pp. 193–207, Feb. 2015.
[8] Shang-Jen Chuang, Chih-Ming Hong, Chiung-Hsing Chen, “Design of intelligent control for stabilization of microgrid system”, Electrical Power and Energy Systems, vol. 82, pp. 569–578, Nov. 2016.
[9] Larbi Djilali, Edgar N. Sanchez, Fernando Ornelas-Tellez, Alberto Avalos, and Mohammed Belkheiri, “Improving Microgrid Low-Voltage Ride-Through Capacity Using Neural Control”, IEEE Systems Journal, vol. 14, no. 2, pp. 2285–2836, June 2020.
[10] N. Chettibi, A. Mellit, “Intelligent control strategy for a grid-connected PV/SOFC/BESS energy generation system”, Energy, vol. 147, pp. 239–262, March 2018.
[11] Larbi Djilali, Edgar N. Sanchez, Fernando Ornelas-Tellez and Mohammed Belkheiri, “Neural Network Based Controller for an AC Microgrid Connected to a Utility Grid”, IEEE Latin American Conference on Computational Intelligence (LA-CCI) Guadalajara, Jalisco, Mexico, 2018, November 7–9.
[12] Yuchen Dai, Chengshun Yang, Dezhi Xu and Xiaoning Huang, “RBF Neural Network Adaptive PID Control for Energy Storage System in Grid-Connected Photovoltaic Microgrid”, 5th International Conference on Information, Cybernetics, and Computational Social Systems (ICCSS), 2018.
[13] Yaran Li, Long Fu, Ke Meng, Zhao Yang Dong, Kashem Muttaqi and Wenli Du, “Autonomous Control Strategy for Microgrid Operating Modes Smooth Trasition”, IEEE access, vol. 8, pp. 142159–142172, August 2020.
[14] Zhuoli Zhao, Ping Yang, Zhirong Xu, Josep M.Guerrero, IEEE transactions on Smart Grid, vol. 10, No. 1, pp. 805–817, January 2019.
[15] S. Mishra, D. Ramasubramanian, and P. C. Sekhar, “A Seamless Control Methodology for a Grid-Connected and Isolated PV-Diesel Microgrid”, IEEE transactions on power systems, vol. 28, No. 4, pp. 4393–4494, Nov. 2013.
[16] Sunpower SPR-315-E-WHT-D (315W) solar panel, Datasheet, “http://www.solar-facts-and-advice.com/support-files/sp_315ewh_en_ltr_p_ds.pdf”, sunpowercorp.com, Document #001-52285 Rev*A / LTR_EN, May 2009.
[17] Emergency Diesel-Generator and Asynchronous motor, Documentation, “https://in.mathworks.com/help/physmod/sps/examples/emergency-diesel-generator-and-asynchronous-motor.html#d120e20981”, Mathworks.
[18] Hao Yu and Bogdan M. Wiliamowski, “The Industrial Electronics handbook 2nd edition”, Intelligent systems, CRC press, 2011, vol. 5, Chapter 12, pp. 12-1–12-5.
Biographies

Anantha Krishnan Venkatesan received B.E degree in Electrical and Electronics Engineering from Madras University, India, 2001, M.E in Power Systems Engineering, College of Engineering, Guindy, Anna University, India, 2006. He is working as Assistant Professor in the School of Electrical Engineering of Vellore Institute of Technology, Chennai Campus, India. His current research interests include Microgrids, Stability Analysis in Microgrid, Neural Network and Fuzzy logic Controller applications.

Senthil Kumar Natarajan completed his B.E degree in Electrical & Electronics Engineering in the year 1997 from University of Madras. He completed his Master’s degree from the faculty Electrical Engineering Anna University, Chennai in the year 2000. He has 22 years of teaching experience. He completed his Ph.D Degree from Anna University on the topic “Stabilization of Power Systems includes grid connected Windfarms using FACTS controllers” in the year 2010. He is presently serving as Professor in the School of Electrical Engineering, Vellore, Institute of Technology, Chennai India. His areas of research interest include power system control, power system stability, modeling of FACTS devices for small signal stability and transient stability studies.
Distributed Generation & Alternative Energy Journal, Vol. 37_2, 361–380.
doi: 10.13052/dgaej2156-3306.37214
© 2021 River Publishers