Remote Diagnosis Method of Substation Equipment Fault Based on Image Recognition Technology
Pei Zhang, Wenshuai Hu*, Xiaolong Hao, Dingding Xi and Shuaishuai Yan
Nanjing Nari information and Communication Technology Co., Ltd,
Nanjing, China
E-mail: huwenshuai@sgepri.sgcc.com.cn
*Corresponding Author
Received 08 April 2021; Accepted 15 April 2021; Publication 24 June 2021
Abstract
In order to better guarantee the operation effect of substation equipment, a remote fault diagnosis method of substation equipment based on image recognition technology is proposed. Combined with image recognition technology, the running image of substation equipment is tracked and collected, the information characteristics of substation equipment are deeply excavated, and the fault area of substation equipment is accurately judged. Remote positioning has been carried out to realize the accurate detection of substation equipment fault. Finally, through the experiment, the remote diagnosis method of substation equipment fault based on image recognition technology is in the actual application process With higher accuracy, it can effectively ensure the safety of substation equipment operation.
Keywords: Image recognition, substation, fault diagnosis, fault area.
1 Introduction
Power system fault intelligent identification and recovery is one of the key technologies of smart grid. Due to the protection of Smart Substation Equipment and the setting of intelligent terminal switch, the power supply reliability of substation is greatly reduced due to the re downloading of configuration files and interval protection while increasing the operation risk of power grid [1]. Therefore, it is of great significance to carry out the research of substation fault intelligent diagnosis technology. With the continuous improvement of intelligent level, in order to ensure the operation safety of substation equipment, a remote fault diagnosis method of substation equipment based on image recognition technology is proposed, which provides a modern platform for efficient maintenance of substation equipment [2]. Therefore, it provides the basis for fault diagnosis and maintenance of substation equipment based on continuous fault diagnosis and maintenance.
2 Remote Diagnosis Method of Substation Equipment Fault
2.1 Image Acquisition of Substation Equipment Fault Information
In order to reduce the equipment fault diagnosis and maintenance cost, we should combine the modern technology of fault diagnosis and maintenance to reduce the equipment fault diagnosis and maintenance [3]. By means of communication such as data network or special channel, the functions of remote automation equipment and computer system status online monitoring, system maintenance and program upgrading can be realized, and intelligent management such as fault warning and fault diagnosis can be realized, which provides technical support for the stable operation of automation equipment. Using image recognition technology, the real-time monitoring of substation equipment operation status is carried out, the main and auxiliary equipment types are identified, whether the main and auxiliary equipment can operate normally, and the problems existing in the equipment operation are analyzed in time [4]. A method for image preprocessing, feature extraction and operation state analysis is proposed. In order to effectively reduce the defects of the camera itself, the camera image must be preprocessed before the working state recognition. The acquisition card is used to obtain the digital image disturbed by noise, and the image is preprocessed to remove the redundant content in the background and the interference in the background[5]. This algorithm can perform Laplace operation on the working condition image and improve the image quality. The image processing is simple and the operation speed is improved by using the binary processing method. The image f (a, b) can be transformed into a binary image
| (1) |
The maximum value is (a, b). The upper and lower thresholds are determined according to the image attributes. If the gray level and running state distribution of histogram are basically the same, it means that the image has both target and background, and has appropriate threshold. This method can effectively separate the recognized target from the background, and use Laplacian operator to enhance the image edge, which is convenient for recognition. Image recognition is the main technology of substation image processing, and image feature extraction is the basis of image recognition [6]. Image features include color, shape and contour, among which shape features are the most intuitive. Image matrix is an image feature with rotation and motion invariants, which can be used to identify the image features of substation equipment. The (n m) – level matrix and central matrix are shown graphically as follows:
| (2) | |
| (3) |
The central matrix can be further defined by formula. For the preprocessed image, the eigenvector of the moment invariant target is obtained in the analysis process. The eigenvector has good anti noise performance and stability. The feature vector can effectively identify and analyze the operation status of substation equipment, and fuzzy image edge texture recognition is a comprehensive method. At present, there are two technical methods [7]. In the original image, large local energy is used to control the feature nodes, and the Bi evolutionary mesh is used to integrate the texture features of these nodes [8]. By continuously improving the ability of intelligent parameter vector texture recognition, the image edge extraction is finally realized. Fuzzy image recognition method based on image features includes dimensionality reduction of texture features, recognition vector planning and feature length projection. The results show that the edge texture features of the electric fuzzy image conform to the singular distribution principle of distribution matrix, and the singularity increases with the increase of power supply time [9]. On this basis, K is taken as the initial scattering parameter of power fuzzy edge texture features, and j is used to represent the reduction coefficient of texture features.
| (4) |
Among them, D represents the maximum dimension condition of edge texture features, a represents the lower limit value of feature integral calculation. Recognition vector planning and recognition length projection are the operation steps of recognizing two interdependent feature subsets. According to the formula, the recognition representative feature planning vector, recognition length parameter and recognition length parameter are set respectively A represents the standard feature subset of power fuzzy image, and the recognition results are expressed by the above variables as follows:
| (5) |
In the above formula, f is the best discriminant solution of fuzzy image feature subset. represents the coefficient of image recognition processing items, is the characteristic subset. Further, the image specific information correction algorithm is optimized:
| (6) |
In the process of image acquisition of substation equipment fault information, substation equipment can be regarded as composed of data acquisition unit and data processing program. Data mining is to directly mine unknown and reliable data information from large database, and use these information to make target decision. Based on this, the image acquisition steps of substation equipment fault information are optimized as follows:
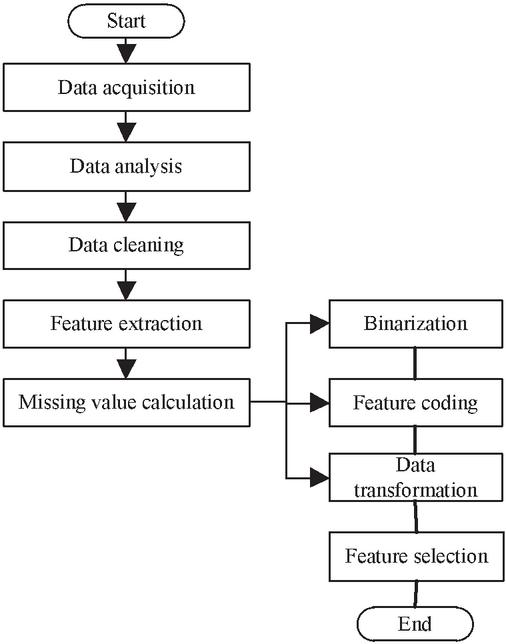
Figure 1 Optimization of image acquisition steps for substation equipment fault information.
By extracting the request in the response module, the response data is obtained, and the fault detection is completed through the data mining process shown in the above figure. The data feature mining processing is carried out through image recognition calculation to obtain the original information, and the data is processed and processed. Finally, the status of some aspects of the equipment is estimated to determine whether the substation equipment is in fault.
2.2 Fault Location of Substation Equipment Based on Image Recognition
The method of fault location of substation equipment is further optimized, and the search order is determined according to the size of node coverage. First find the coverage of the first dependent root node, find the node you want to search on the next child node, and then repeat the search until the search reaches an empty coverage [10]. First of all, the optical fiber network communication fault location system needs to determine the network topology, collect equipment alarm information and carry out correlation, use fault location algorithm to achieve fault location, timely record transformer fault location, predict and evaluate simulation quantity [11]. All kinds of early warning information obtained in a certain period of time constitute a set of early warning sources. The received warning information is divided into n groups of entity objects. For any object in a group of entities, the probability of its occurrence can be calculated. When the input value of the node is 1, it indicates that the transformer works normally; when the input value of the node is 0, it indicates that the transformer works abnormally. If S1 and S2 are the jumping limits of signals at the same fault point, the signal jump situation needs to be calculated, and the allocation is as follows:
| (7) |
According to the distribution results shown in the table above, the reliability of substation equipment fault location is calculated
| (8) |
Here is the signal strength of the normal state. The detection functions obtained are as follows:
| (9) |
When ai1 and ai2 are at the same fault point, it is necessary to record the signal jump. The radar will scan a group of point data in the radar coordinate system when the substation equipment is running [12]. The relevant information of the target, including scanning point, starting point and ending point, is extracted from the data set; all data are extracted from the data points of substation equipment. Due to the lidar scanning point data set, most of the feature points can not work normally due to reflection, so preprocessing is needed. The following are the specific steps of pretreatment:
(1) Filter the point data in all point data sets to obtain an effective point set ;
(2) Calculation of effective feature point distance between two points in relative concentration ;
(3) Judge whether it belongs to the same region feature subset, the specific judgment algorithm is as follows:
| (10) |
Among them . represents the resolution of fault information image; and represents system parameters. By further optimizing the fault information location algorithm, we can get the following results:
| (11) | |
| (12) |
In the above algorithm, the measured values are aj and aj1 respectively. In the whole operation process, the device determines the specific address of the fault target according to the actual situation, and uses the lidar to locate the target, so as to obtain the location of the fault target in the LAN. According to the coordinate system of the whole machine, the positioning process is designed: up and down power detection to check whether the received fault information is out of time; when the communication is interrupted, there is an error in the broadcast; when the machine stops for the first time, it will send a reaet request [13]. Delay 5 ms. If the shutdown is repeated, the fault should be eliminated. If there is no problem, send a scan request. Receive the ranging data, judge whether the waiting time exceeds the specified time, if it exceeds the specified time, remove the fault and check whether the scanning device is normal. If there is no timeout, preprocessing of distance data is required. Check whether the scan has completed and if so, send a stop request to get the specific location of the error. We also need to wait for the scan to complete. According to the work flow of fault location, relevant fault features are extracted to realize the real-time fault location of substation equipment, and various fault causes are recorded at the same time. On this basis, to improve the effectiveness of fault detection.
2.3 Realization of Substation Equipment Fault Remote Diagnosis
Using the diagnosis resources such as substation equipment fault diagnosis database and diagnosis knowledge/model database, a wide area substation diagnosis resource sharing platform is established to provide online support for remote diagnosis experts of each substation. The diagnosis knowledge and data required by substation fault diagnosis are provided by the diagnosis database and the diagnosis knowledge/model base. At the same time, the correct diagnosis knowledge provided by the diagnosis knowledge/model base is continuously obtained through the learning mechanism, and the graph is also continuously refined and extracted, which makes the diagnosis knowledge and model more perfect [14]. The remote fault diagnosis platform provides on-line diagnosis and maintenance services by obtaining the information of substation equipment and monitoring nodes. It can provide support for complex faults, and is the core function layer of the whole system. When the fault diagnosis agent transfers the new knowledge to the knowledge/model base of remote diagnosis layer, it will update the knowledge acquired in the diagnosis process and enrich its own knowledge base. The application of fault diagnosis tools in system knowledge/model base realizes the acquisition, update, transmission, refinement and enrichment of fault knowledge, which greatly improves the intelligent level of intelligent diagnosis system. Using the data of each monitoring node in substation automation system, the information of substation equipment and all SAS monitoring nodes are collected, and the simple fault diagnosis of regional automatic monitoring node is carried out. In the process of fault diagnosis acquisition, it is easy to generate noise, which seriously affects the quality of fault diagnosis, and brings difficulties to the identification and analysis of substation equipment [15]. Therefore, in the process of fault diagnosis, the target area where the substation equipment is located should be divided into two values to get the main feature points. The moment invariants of images are mainly manifested in different device types. By comparing the fault image with the fault image input by SVM, the fault location can be determined. The following figure shows the specific steps of fault identification.
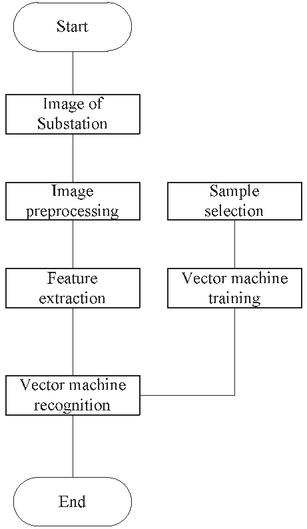
Figure 2 Optimization of substation fault diagnosis steps.
Combined with image recognition technology, the remote detection and fault diagnosis of substation equipment operation status are carried out, and it is combined with the recognition process in the diagram to improve the automation level of equipment operation state fault diagnosis. The redundant resources are used to optimize the software and hardware configuration of the remote fault diagnosis equipment in the substation. The redundancy can be realized by adding redundancy to the hardware or by modifying the software in the critical position. Since the main purpose of fault recovery and reconstruction is to restore the same load as possible, considering the load level, the total load recovery can be taken as the objective function; in addition, the switch on or off will affect its service life. In order to reduce the economic loss, the objective function a can also adopt the minimum switching times, and the maximum load recovery is as follows:
| (13) |
According to the above relationship, the judgment matrix has complete consistency, and its characteristic root P is the set of the first, second and third load of the distribution network, and other characteristics are all zero; in practical application, due to the accuracy and other reasons, the judgment matrix can not meet the strict consistency, so it is set as the substation fault judgment coefficient of 1, 2, 3 load. If the elements in the judgment matrix can not achieve satisfactory consistency, then only adjust the elements to achieve satisfactory consistency; if the elements in the judgment matrix achieve satisfactory consistency, the hierarchical weight of each element can be determined, that is, the eigenvector corresponding to each element and its maximum eigenvalue can be standardized. The specific algorithm is as follows:
| (14) |
For the same fault information source, different software can be used for remote identification and analysis, and fault-tolerant instructions can be modified for fault compensation to improve the remote diagnosis ability of equipment. In order to ensure the effect of substation fault diagnosis, it is necessary to classify the common faults in the substation first. See the table below for details:
Table 1 Common fault types of substation
| Fault Category | Maintenance Advice |
| High frequency channel fault | Implementation of relay protection |
| Insulation capacity of dc system fault | Implementation of relay protection |
| Storage voltage fault | Implementation of relay protection |
| Power switch fault | Implementation of relay protection |
| Relay protection fault | Implementation of relay protection |
| Substation leakage fault | Implementation of relay protection |
| Power box, lighting box fault | Implementation of relay protection |
| Drying equipment fault | Implementation of relay protection |
| Ac feeder of substation fault | Implementation of relay protection |
| Transformer cooling parts fault | Site management and later implementation |
According to the specific work content in the table, accurate and effective remote diagnosis and treatment of substation equipment fault can be realized. Due to the great difference between the data source and diagnosis result of fault diagnosis, the communication methods have their own characteristics. It is necessary to consider the specific functions and application environment of various hardware, so a general communication scheme must be designed to adapt to various devices. For the fault recovery and reconstruction of distribution network, different objective functions have different reconstruction effects, and the selection of appropriate objective function will be conducive to the safe and economic operation of distribution network after reconstruction. The remote diagnosis of substation fault based on the above method can detect abnormal data more quickly and ensure the safe and stable operation of substation.
3 Analysis of Experimental Results
In order to verify the effectiveness of the remote fault diagnosis method for substation equipment based on image recognition technology, Visual C is tested, and test data acquisition, communication processing and background core services are developed. The establishment of network application platform ensures the efficient operation of the system. The web application developed by java language has strong compatibility and generality. Using ADO, ODBC, JDBC, CORBA and other database processing interface technology, it is compatible with general standard commercial databases such as Oracle, Sybase, DB2, MS, SQL server and so on, which is convenient to interface with other systems. In order to ensure the accuracy of fault detection parameters. It is necessary to test the time and accuracy of system diagnosis. In order to analyze the test results and determine the time of fault diagnosis, the diagnostic errors of existing power engineering equipment are compared and detected. The specific detection results are shown in the table below.
Table 2 Experimental environment data parameters
| Number of | Original | The Test Results | Relative | Traditional Test | Relative |
| Experiments | Operation Data/v | in This Paper/v | Error/v | Results/v | Error/v |
| 1 | 1.25 | 1.25 | 0 | 1.01 | 0.24 |
| 2 | 1.89 | 1.90 | 0.01 | 1.62 | 0.27 |
| 3 | 2.67 | 2.65 | -0.02 | 1.95 | 0.22 |
| 4 | 4.63 | 4.63 | 0 | 2.92 | 1.71 |
| 5 | 8.79 | 8.85 | 0.06 | 4.32 | 4.74 |
| 6 | 11.28 | 11.23 | -0.05 | 8.54 | 2.74 |
| 7 | 15.86 | 15.80 | -0.06 | 10.12 | 5.74 |
| 8 | 22.35 | 22.31 | -0.04 | 16.30 | 6.01 |
| 9 | 25.63 | 25.61 | -0.02 | 19.11 | 6.50 |
| 10 | 30.87 | 30.86 | -0.01 | 24.82 | 6.04 |
The fault diagnosis time is further tested and compared. See the table below for details.
Table 3 Test comparison of fault diagnosis time
| Number of Experiments | Traditional Detection Methods/S | Design Method/S |
| 1 | 65 | 22 |
| 2 | 68 | 23 |
| 3 | 60 | 21 |
| 4 | 61 | 20 |
| 5 | 60 | 22 |
It can be seen from Tables 2 and 3 that the test error of the remote substation equipment fault diagnosis method based on image recognition designed in this paper is less than 0.06, while the test error of the traditional method is greater than 0.2, which shows that the method has high diagnostic accuracy and fully meets the test requirements. The design of remote substation equipment fault diagnosis method based on image recognition takes longer than the design of this paper, so the design of this paper can greatly save the time of fault diagnosis.
4 Conclusion
With the advent of the Internet of things era, power equipment is gradually connected with the network, and its intelligent fault detection function also provides great help for the power industry. The traditional fault diagnosis methods of power equipment have some problems, such as low efficiency, low speed of fault information collection, inaccurate information collection and so on. This paper puts forward a remote substation equipment fault diagnosis method based on image recognition, in order to improve the speed of acquisition, enhance the efficiency of acquisition, collection efficiency, speed, experimental research confirmed that the remote substation equipment fault diagnosis method based on image recognition is also more accurate for fault information collection, improve the overall operation of the substation safety state, ensure information collection The accuracy and effectiveness of the system provide a powerful help for the expansion of China’s power industry.
References
[1] Jingwen X, Yunxuan Z, Ziqi Y. Retraction: Early bearing fault diagnosis based on improved SFLA and ELM network[J]. Transactions of the Canadian Society for Mechanical Engineering, 2018, 42(2):187–193.
[2] Wang M, Zhang Z, Li K, et al. Research on key technologies of fault diagnosis and early warning for high-end equipment based on intelligent manufacturing and Internet of Things[J]. The International Journal of Advanced Manufacturing Technology, 2020, 107(3):1039–1048.
[3] Zhi Z, Ming W, Zongjie C, et al. SAR Image Recognition with Monogenic Scale Selection-Based Weighted Multi-task Joint Sparse Representation[J]. Remote Sensing, 2018, 10(4):504.
[4] Lin T, Chen Z, Zheng C, et al. Fault diagnosis of lithium-ion battery pack based on hybrid system and dual extended Kalman filter algorithm[J]. IEEE Transactions on Transportation Electrification, 2020(99):1.
[5] Cheng L, Yu T. Dissolved Gas Analysis Principle-Based Intelligent Approaches to Fault Diagnosis and Decision Making for Large Oil-Immersed Power Transformers: A Survey[J]. Energies, 2018, 11(4):913.
[6] Ma Y, Wei W, Zhou C. Research on Body Mass Estimation Method of Koi Broodstock Base on Feeding State Image Recognition Technology[J]. Journal of Physics: Conference Series, 2020, 1631(1):12138.
[7] Maity S, Chakrabarti A, Bhattacharjee D. Robust Human Action Recognition Using AREI Features and Trajectory Analysis from Silhouette Image Sequence[J]. Iete Journal of Research, 2018, 65(2):1–14.
[8] Jin S, Fan D, Malekian R, et al. An image recognition method for gear fault diagnosis in the manufacturing line of short filament fibres[J]. Insight: Non-Destructive Testing and Condition Monitoring, 2018, 60(5):270–275.
[9] Wu Y, Fu Z, Fei J. Fault diagnosis for industrial robots based on a combined approach of manifold learning, treelet transform and Naive Bayes[J]. Review of entific Instruments, 2020, 91(1):015116.
[10] Biswasa R, González-Castroa V, Fidalgoa E, Enrique A. Perceptual image hashing based on frequency dominant neighborhood structure applied to Tor domains recognition[J]. Neurocomputing, 2020, 383(8):24–38.
[11] Darong H, Lanyan K, Xiaoyan C, et al. Fault diagnosis for the motor drive system of urban transit based on improved Hidden Markov Model[J]. Microelectronics Reliability, 2018, 82(MAR.):179–189.
[12] Zheng L, Yan P, Chen F. Power Grid Fault Diagnosis Method Based on Stacked Sparse Denoising Auto-Encoder and GRU Network[J]. Journal of Physics: Conference Series, 2020, 1631(1):12114.
[13] Zhang Y, Fan Z, Gao X, et al. A Fault Diagnosis Method of Train Wheelset Rolling Bearing Combined with Improved LMD and FK[J]. Journal of Sensors, 2019, 2019(18):1–11.
[14] Moshen K, Gang C, Yusong P, et al. Research of Planetary Gear Fault Diagnosis Based on Permutation Entropy of CEEMDAN and ANFIS[J]. Sensors, 2018, 18(3):782.
[15] Yuan C, Peng L, Yuzhuo Z. Parallel processing algorithm for railway signal fault diagnosis data based on cloud computing[J]. Future Generation Computer Systems, 2018, 88(11):279–283.
Biographies

Pei Zhang graduated from Huaqiao University with a major in signal and information processing. She is engaged in algorithm research and product development in artificial intelligence algorithms and multimedia processing. She has participated in the research of artificial intelligence algorithms in the National Grid Science and Technology Project, and participated in the development of smart and secure hard drives Video recorders, smart analysis devices, smart security cameras and many other software and hardware products widely used by State Grid Corporation have achieved good economic and social benefits. Published 1 core paper, applied for multiple patents, participated in the formulation/revision of 1 enterprise standard.

Wenshuai Hu Engaged in Construction Management of major projects of State Grid, research in the fields of video processing and Artificial Intelligence Applications.

Xiaolong Hao Long term engaged in enterprise information architecture design, video image processing and other aspects of research.

Dingding Xi received his undergraduate degree from the NYU Tandon School of Engineering, and pursued a graduate degree at Columbia University in Computer Engineering. He mainly engaged in artificial intelligence, image processing research and product development. He is currently the Deputy Director of the Technology Innovation Center of Nanjing Nari Information and Communication Technology Co., Ltd. Research results have been published in internationally renowned academic journals and conferences. Organized and participated in the research and development of smart security hard disk video recorders, smart analysis devices, smart security cameras and other software and hardware products widely used by State Grid Corporation, and achieved good economic and social benefits. The research results have been published in some famous academic journals and conferences at home and abroad, including: Wireless Communications and Signal Processing, etc. Among them, 1 SCI retrieved paper, 2 EI retrieved papers, 8 authorized patents, and 3 participating enterprise standards. Won 1 second prize of the State Grid Corporation of Science and Technology Progress; 1 first prize of the Youth Innovation Competition of the State Grid Electric Power Research Institute; Participated in the key technology and application of high-precision analysis of power Internet of Things images and was recognized as the international leading level by the China Electrical Engineering Society Participated in the formulation of 3 national grid artificial intelligence enterprise standards.

Shuaishuai Yan He graduated from Shandong University, majoring in power engineering and management. At present, he is mainly engaged in project management and is very familiar with various systems in the substation.
Distributed Generation & Alternative Energy Journal, Vol. 36_2, 125–140.
doi: 10.13052/dgaej2156-3306.3623
© 2021 River Publishers

