Stochastic Distribution Controller for Wind Turbines with Doubly Fed Induction Generator
Vijayalaxmi Munisamy1,*, Nayagam Shanmuga Vadivoo2 and Vaithilingam Devasena1
1Department of Electrical and Electronics Engineering, College of Engineering,
Guindy, Anna University, Chennai, India
2Department of Electrical and Electronics Engineering, Thiagarajar College of Engineering, Madurai, India
E-mail: vijayalaxmim0528@gmail.com
*Corresponding Author
Received 01 October 2020; Accepted 02 March 2021; Publication 28 April 2021
Abstract
The major purpose of this work is to design the controllers for controlling the variable speed, variable pitch wind turbine (WT) with doubly fed induction generator (DFIG). Vector control strategy is adopted for controlling the DFIG active and reactive power. Generator torque is control to provide the regulated real power with minimum fluctuation. The fixed gain proportional-integral (PI) controller designed to the converter of rotor side and grid side has limited operating range and inherent overshoot. Gain scheduling PI controller is designed to minimize the overshoot and fluctuation exists in proportional-integral controller. Since DFIG based wind energy conversion system (WECS) works in uncertain wind speed, stochastic distribution control (SDC) method is proposed to control the probability distribution function (PDF) of DFIG based WECS. It copes with nonlinearities in the WECS and contiguous variations at operating point and provides satisfactory performance for the whole operating region. It improves the performance together with power quality of generated electric power thereby maximizing the lifespan of installation and ensures secure and acceptable operation of the DFIG based WECS.
Keywords: PI controller, probability distribution, reactive power control, stochastic processes, wind turbine.
1 Introduction
WECS has benefited from static advance on technology; also improvements are made at components that handle utility interface, electric machine, electronic power converter, control proficiency [1]. Howbeit, the nature of unpredictable wind inflict the utility operators to realize contrasting around electric power generation [2]. An elegant-designed control system helps efficacious energy production, great power quality, also aerodynamic lessening, mechanical loads, as a consequence increasing the life of installation. As a result, the control system would have straightforward brunt in the cost of generated energy [3, 4]. Stochastic control is considered more powerful in control theory and applications to simplistic reason that various real industrial processes are under several randomness sources [5].
At controller design of DFIG based WECS is to diminish the stochastic at closed loop system is the significant problem. Moreover, the nonlinearity of system, stochastic variations of wind speed, physical obstacles in system variations make hard of control design. The classical PI controller along with Fuzzy PI design is delineated at [6]. At variable speed turbines the torque control is mainly utilized to increase the energy under the rated wind speed as well as control rated upper torque limit [7]. To manage the nonlinearity of system, usage of gain-scheduling Linear Quadratic Gaussian (LQG) controller is described on [8]. Gain scheduled controller is defined on [9, 10]. The Adaptive Fuzzy Gain Scheduling of proportional Integral (AFGPI) Controller design to WECS is delineated at [11], where the optimization of Fuzzy rules is used to correct the PI controller parameters in terms of error and their first derivative.
This paper concentrates at designing stochastic distribution controller to produce efficient power with better quality for variable speed horizontal axis WT with DFIG of 2 MW capacity.
2 Wind Turbine with DFIG
A wind turbine with DFIG has three bladed WT rotor connected with wound rotor induction generator via gear box. WECS is fabricated along subsystems, such as aerodynamic, drive train, DFIG and voltage source converter (VSC) system. VSC system has Rotor Side Converter (RSC) and Grid Side Converter (GSC) coupled to DC link. The dynamics and the aerodynamic modeling together with drive train system of DFIG based WECS is given in [13]. Wind speed is taken in range from 4 to 26 m/sec [12]. The dynamic characteristics between wind speed, pitch angle and real power are received from designed DFIG based WECS.
DFIG control strategy is classified into two types. They are scalar control and vector control. Scalar control has sluggish response, due to inherent coupling effect. It is overcome by vector control method. Vector control strategy and DFIG system modeling at synchronous rotating frame is given in [14]. DFIG’s ratings and specifications are indicated in Appendix. The output of the generator is supplied to the VSC. Two back-back voltage-fed current controlled converters are coupled with rotor circuit. By DC-link capacitor the two converters are connected with each other [13].
The step changes in wind speed is given as input moreover dynamic parameters of WT like generator speed, active and reactive power are obtained in open loop DFIG based WECS. The rotor voltage and DFIG current are fluctuating owing to uncertain wind speed then it makes the stator voltage and current to fluctuate more, which should be reduced and kept constant, because it is directly coupled with grid. The stator real power, directly coupled with grid is fluctuating and has large steady state error owing to uncertainty present at wind speed. At open loop DFIG based WECS the reactive power is high and unstable.
3 Design of Controllers
DFIG based WECS is represented in d-q synchronous reference frame [15]. The vector control [16, 17] strategy and direct power control [18] is utilized to regulate the Wind turbine active and reactive power with DFIG system. DFIG modeling at d-q reference frame along the orientation of stator field displays that rotor current could be controlled independently [18]. RSC permits for controlling the active and reactive power through performing at directly together with rotor voltage quadrature components. It performs active and reactive power’s disconnected control. The RSC operates in varying frequencies similar to variable rotor speed demand depending on the wind speed. RSC uses torque controller for regulating the DFIG real power. Vector control strategy for GSC is the grid voltage based disconnected control. It keeps the active power independent control to zero [17] also improves the power factor of rotor side and maintains active power control grid side converter DC-link voltage in reference value [16].

Figure 1 Block diagram of DFIG based WECS with controllers.
When compared with direct power control the scheme of vector control has accurate with low power quality problems. GSC controller adopts PI control strategy; whereas RSC controller is incorporated with proportional integral controller, gain scheduling proportional integral controller and SDC. Figure 1 depicts the DFIG block diagram based WECS with controllers.
3.1 Proportional Integral (PI) Controller
Figure 2 delineates the control structure of PI controller remove the steady state error and minimize the fluctuations at real power of DFIG based WECS, thereby increases the system response.
Proportional integral controller is utilized to regulating the torque, speed and power to its reference value. The controller output specifies reference rotor current to generate the desirable torque. With the rotor voltage reference, internal PI control loop is utilized to control the rotor current error for their reference value. Rotor side converter is used to autonomously regulate the stator active power Ps together with reactive power Qs [16, 17].

Figure 2 Control Structure of PI controller.
Figures 3–6 defines the control structure considered for designing the RSC controller. The error signal is received from the variation in between the desirable real power and measured real power. The error signal is given to the controller, which generates I reference signal. It is then compared with measured I furthermore the error is given to the controller, which produces the reference V. According to the Figures 5 and 6 the measured values of V and V are obtained. The measured values of V and V are given into the dq0 to abc transformation. V is given to GSC with PI controller to produce the desired output.
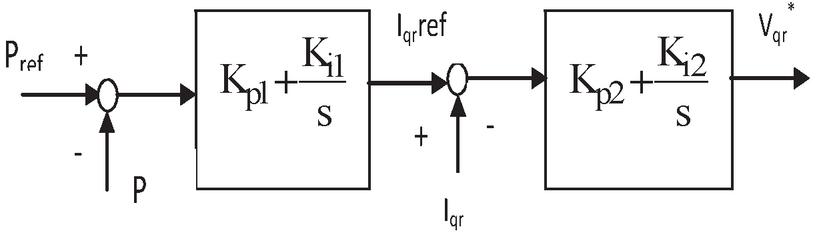
Figure 3 Control structure to obtain V.

Figure 4 Control structure to obtain V.
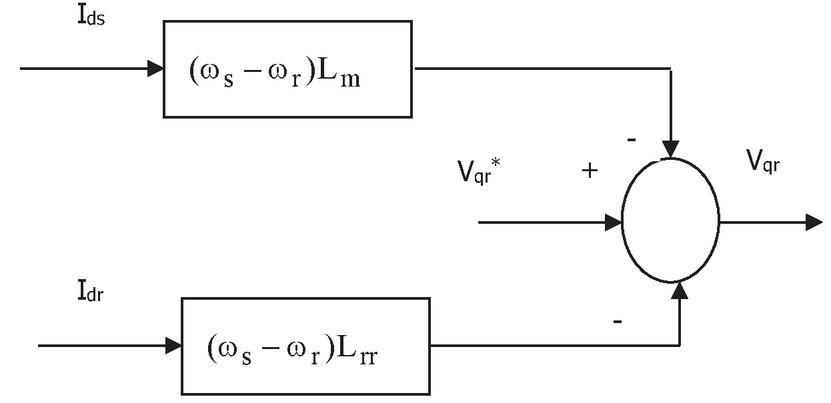
Figure 5 Block Diagram to obtain V.

Figure 6 Block Diagram to obtain V.
GSC is accountable for holding direct current link voltage stable in the reference value with enhancing the rotor side power factor [16]. The GSC incorporated with PI controller, operates at voltage based synchronously rotating reference frame and regulates the reactive power Q among GSC and grid [14, 15].
3.2 Gain Scheduling PI Controller
The inherently high non-linearity of DFIG based WECS makes PI controller a bad choice to applications that require more dynamic efficiency across the whole operating regions. In order to regulate generator electromagnetic torque and controlling real power as well as generator speed, gain scheduling PI Controller is designed. It ensures the system variable’s rapid and accurate regulation throughout their operational constraints [19].
Figure 7 shows the control structure of fuzzy gain scheduling proportional integral controller. The K implies proportional gain and K implies integral gain of PI controller differ in the prescribed range that is K varies between 0.05 to 0.95 whereas K takes the range from 0.05 to 0.9. The Fuzzy rules optimization is used to correct the PI controller parameter in terms of error and their first derivative [6]. Depending on the error values and change in error, the fuzzy inference system defines the proportional and integral gains values K and K respectively. It considered K and K of proportional integral controller varies among the maximal and minimal ranges allowed [6]. The speed controller output specifies current reference (I). Proportional gain (K) and integral gain (K) are normalize amid zero and one applying linear transformations represented in Equations (1) and (2). K and K are defined by the set of fuzzy rules.
| (1) | ||
| (2) |
Since the DFIG based WECS needs a large control signal during the transition period, to avoid overshoots the PI controller must contains a huge proportional gain and tiny integral gain. When the generator achieves the reference speed, a small contro1 signal is needed for maintaining the generator speed in the desirable value. It tunes PI controller to have a tiny K, huge K to deal with steady-state error.

Figure 7 Control structure of fuzzy gain scheduling PI controller.
Depending on these attitudes, K or K varies amid the maximal and minimal values to obtain adequate controller performance. Figures 8 and 9 depicts the input error membership function and change in error for gain scheduling PI controller. The output membership function for K and K are given in Figures 10 as well as 11. Tables 1 and 2 tabulate Fuzzy tuning rules to Proportional gain K with integral gain K.
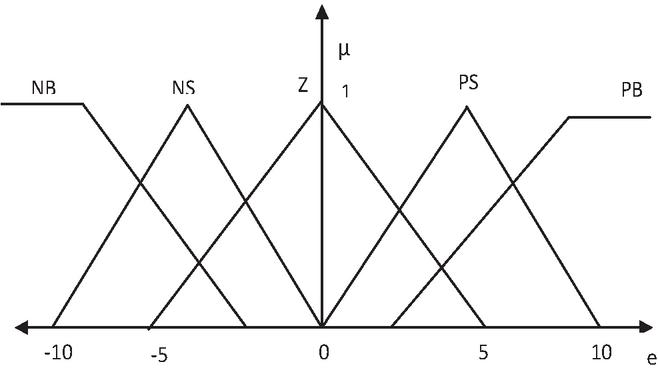
Figure 8 The input membership function of error for gain scheduling PI controller.

Figure 9 The input membership function of change in error for gain scheduling PI controller.

Figure 10 The output membership function for K.

Figure 11 The output membership function for K.
Table 1 Fuzzy tuning Rules for K
| NB | NS | ZO | PS | PB | |
| NB | B | B | B | B | B |
| NS | B | B | B | B | B |
| ZO | S | S | S | S | S |
| PS | B | B | B | B | B |
| PB | B | B | B | B | B |
Table 2 Fuzzy tuning Rules for K
| NB | NS | ZO | PS | PB | |
| NB | S | S | S | S | S |
| NS | S | S | B | S | S |
| ZO | S | B | B | B | S |
| PS | S | S | B | S | S |
| PB | S | S | S | S | S |
3.3 Stochastic Distribution Controller (SDC)
Stochastic distribution controller systems have 2-D properties concerning time and random variable’s probability space. Stochastic systems are extensively faced due to all control systems are under random signals emanating from the variation of system parameter and sensor noise. The significant problem of controller design is reduce the randomness at closed loop system. It encouraged minimal variance control, aimed at minimizing variations or the tracking errors at controlled system outputs. SDC is attentive on output mean control and stochastic system variation. SDC can be designed using the given four methods
• Output PDF control utilizing neural network (NN).
• Output PDF control utilizing input-output system samples.
• Minimal error entropy control to non Gaussian stochastic systems
• SDC concept application to filtering design with fault diagnosis
SDC control design algorithms for output PDF control may typically categorized as two groups they are measurable output PDFs and not measurable output PDFs. Control algorithms are used to measurable output PDFs are
• NN is applied for approximation the instant and measurable output PDFs
• NN parameter (weight with bias) is dynamically coupled with control input.
Given simple B-spline estimate is utilized to estimated the system output PDF in SDC
| (3) |
where u indicates input in the test time k, w(u) specifies approximation weight for output PDF (y,u), B(y) denotes fixed basis function. Because (y,u) incorporation is always same in their domain [a,b], only n-1 weight is independent. Here, V implies independent weight vector, after that the dynamic part may be declared as,
| (4) |
here f(V,u) denotes vector function that indicates the dynamics among NN weight vector and control input. Equations (3) and (4) make the structure of typical modeling to stochastic distribution systems, here the input implies time varying signal whereas output implies output PDF. To Gaussian input this model is valid. To the system specified through Equations (3) and (4), the controller design aim is realized the control of output PDF shape. To MIMO systems the output PDFs all output variables PDF could be integrated. The NN structure is selected once, PDF shape control could be considered as the weights and biases control. To model 3 and 4, such output PDF control may be assumed through Vk control. The output PDF is rated approximate by B-Spline NN, comparatively simple solution is installed that reduces the given performance index [20].
| (5) |
The shape control of system output PDF utilizing linear B-spline model, control input is developed that reduces the output entropy of closed loop system. This controller may reduce the uncertainty of closed loop system because entropy is randomness evaluate of provided stochastic variable [22]. The target is suitable in good for common minimal variance control of Gaussian functions because reducing variation is equal to reducing the randomness of output. To reach this target, a common measured rather than the system output variance required to be assumed for Gaussian stochastic system randomness. The reducing entropy is equal to the variance reduction of Gaussian variables and the minimal variation control to ARMAX systems (under Gaussian noise inputs) are minimal entropy control. Because entropy contains typical meaning than variation to arbitrary variables, it could be utilized to evaluate, generate design criteria to typical dynamic stochastic systems subject to arbitrary input; its PDF may be any form [20].
At this research work, the entropy concept is used to controller design for DFIG based WECS subject to arbitrary bounded random input. A linear B-spline model is applied to create the system and performance functionality, in which entropy duration and restriction of quadratic input are used as targets for needed optimization. A local optimal control input is designed subject to few conditions, also it is demonstrated that the control input is structured in nonlinear form that is associated with system’s measured output PDF and past inputs. The stability of closed loop is examined whereas local stability state is installed. Although, the proposed control algorithm considers that the output PDF is assessable. This research work focuses on the control of tracking error entropy, where PDF of closed loop system tracking error is designed using the random input PDF.
To suggest dynamic PDF model to closed-loop control intention, B-spline NN is typically applied to output PDF approximations, where basic weight function is computed from PDF fit, also the weight dynamics model getting through least-square estimation or other regression approaches. In the proposed SDC, wind speed is considered with non-Gaussian disturbances. The real power output of DFIG based WECS is trained with NN controller and the control strategy of Minimum Error Entropy (MEE) [24] to get the best performance of the system. An algorithm of Gradient descent-type is adopted with the approach of incremental perturbation to estimate corresponding gradient of non-Gaussian disturbances in wind speed. It effectively reduces the non-Gaussian disturbances influence in wind speed and PDF of DFIG based WECS real power output is generated.

Figure 12 PDF of DFIG based WECS obtained from neural network controller with minimum error entropy control strategy.
The wind speed PDF obtained from neural network controller is estimated with kernel density estimation (KDE) approach and sliding window (SW) method. In KDE, the wind speed PDF can be estimated from the sample sequences given in Equations (6) and (7).

Figure 13 Performance of neural network controller with minimum error entropy control strategy.
At any time t, DFIG based WECS distribution shape of specified by its PDF (y, u(t)) [23]. KDE approach with SW method is used to estimate the PDF which is obtained from neural network controller with MEE control strategy. Figure 12 depicts the PDF of trained DFIG based WECS is obtained. Figure 13 represents NN controller performance with MEE control method.
3.3.1 Non-parametric Estimation of objective Function
PDF of wind speed obtained from neural network controller is estimated with kernel density estimation method and sliding window technique. In KDE the wind speed PDF could be estimated from the sample sequences given in Equations (3) and (4). At any time t, DFIG based WECS distribution shape is represented by its PDF [22].
| (6) | ||
| (7) |
where indicates Gaussian Kernel function with standard deviation [23]. The estimation of quadratic Renyi’s entropy including mean value is declared given in Equations (8)–(10)
| (8) | ||
| (9) | ||
| (10) |
where H(e) implies quadratic Renyi’s entropy [24] of every tracking error , refers joint entropy of tracking errors and and E(e) denotes every tracking error mean value ( [23]. KDE approach is validated to be an effectual PDF estimation method. Although, samples are produced in every instant , this needs mass memory and leads to higher computing load. In Sliding Window technique, in instant , quadratic Renyi’s entropy is determined in Equations (11) and (12). At PDF the tracking error current model is used to get the stochastic estimate given in Equations (13) and (14).
| (11) | ||
| (12) | ||
| (13) | ||
| (14) |
where represents tracking error recent models on instant. It also estimates the (joint) PDF of tracking error on models . After that, PDF estimation (joint) is specified in Equations (15) and (16). Hence stochastic estimate of tracking error (joint) entropy in instant is given in Equations (17) and (18)
| (15) | ||
| (16) | ||
| (17) | ||
| (18) |
The non parametric estimated output obtained from KDE and sliding window technique are given to the fuzzy controller, which in turn selects the best estimated output. Fuzzy tuning Rules framed to get the maximum value of PDF of DFIG based WECS is given in Table 3.

Figure 14 The input membership function for non parametric estimated output PDF obtained from kernel density estimation.

Figure 15 The input membership function for non parametric estimated output PDF obtained from sliding window technique.

Figure 16 The output membership function for PDF obtained from kernel density estimation and sliding window technique.
Table 3 Fuzzy tuning rules to get the maximum value of PDF of DFIG based WECS
| LB | MB | HB | |
| LB | MB | MB | HB |
| MB | MB | MB | HB |
| HB | HB | HB | HB |

Figure 17 Flow chart for stochastic distribution controller designed to obtain the PDF of V.
Fuzzy controller output is taken as V and V is obtained from PI controller. V and V are given to dq0 to abc transformation. V is given to GSC with PI controller for generating the desired output. The PI controller is designed for GSC to achieve stable DC link voltage then to enhance the rotor side power factor. The input membership function for non parametric estimated output PDF obtained from KDE with sliding window technique is given in Figures 14 and 15. The output membership function for PDF obtained from KDE with sliding window technique is given in Figure 16. Flow chart for Stochastic distribution controller designed to obtain the PDF of V of the system is given in in Figure 17.
4 Results and Discussion
The step changes are given in wind speed and efficiency of DFIG based WECS is observed and analysed for PI, gain scheduling PI and SDC. PI controller tries to minimize the steady state error of real power then makes the DFIG based WECS stable. To overcome the fluctuations at real power of DFIG based WECS, which is not reduced by PI controller, gain scheduling proportional integral controller is developed. Gain Scheduling PI controller adopts Fuzzy Logic method to adjust the controller gain values of PI controller. The proportional gain K varies between 0.05 to 0.95 and integral gain K takes the range between 0.05 to 0.9. The real power obtained from the designed gain scheduling PI controller reveals that it does not minimize the steady state error like PI controller, but it minimizes the fluctuations in the real power compared to PI controller. To minimize the steady state error and fluctuations at real power of DFIG based WECS, SDC is proposed. SDC directly controls the RSC voltage (V) depends on the PDF of DFIG based WECS obtained from training the neural network controller with minimum error entropy control strategy. SDC, referred to as PDF shaping control [22, 25, 26] decreases the steady state error and fluctuations in the real power of DFIG depend WECS. DFIG based WECS reactive power flowing from grid to generator’s stator windings is very much reduced to maximize the real power of DFIG based WECS. Average values of dynamic parameters like active and reactive power, DFIG based WECS generator speed is compared and given in Table 4.
Table 4 Comparison of the average values of dynamic parameters DFIG based WECS
| Average Value | Stochastic | |||
| of System | Without | PI | Gain Scheduling | Distribution |
| Parameters | Controller | Controller | PI Controller | Controller |
| Real Power (p.u) | 0.688 | 0.904001 | 0.892151 | 1.56 |
| Reactive Power (p.u) | 0.464 | 0.562007 | 0.556035 | 9.80392e-56 |
| Generator Speed (p.u) | 1.496 | 1.667081 | 1.655831 | 1.67276 |
Figure 18 shows the step changes in wind speed given as input. Figure 19 shows the generator speed of DFIG based WECS. SDC increases the generator speed compared to PI with gain scheduling PI controller. Figure 20 depicts the real power of DFIG based WECS with PI and gain Scheduling proportional integral controller. Gain Scheduling PI controller reduced fluctuations of real power comparing with proportional integral controller. Figure 21 indicates real power of DFIG based WECS with PI, gain scheduling PI and SDC. It shows that stochastic controller minimizes the steady state error and fluctuations on DFIG based WECS real power. Figure 22 represents DFIG based WECS reactive power with proportional integral, gain scheduling PI and SDC. DFIG based WECS reactive power with stochastic distribution controller is reduced to a large extent.
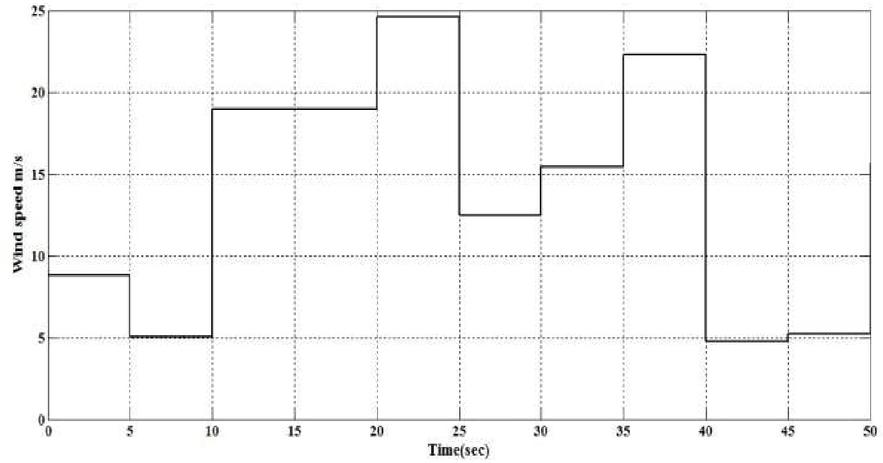
Figure 18 Wind speed with step changes.
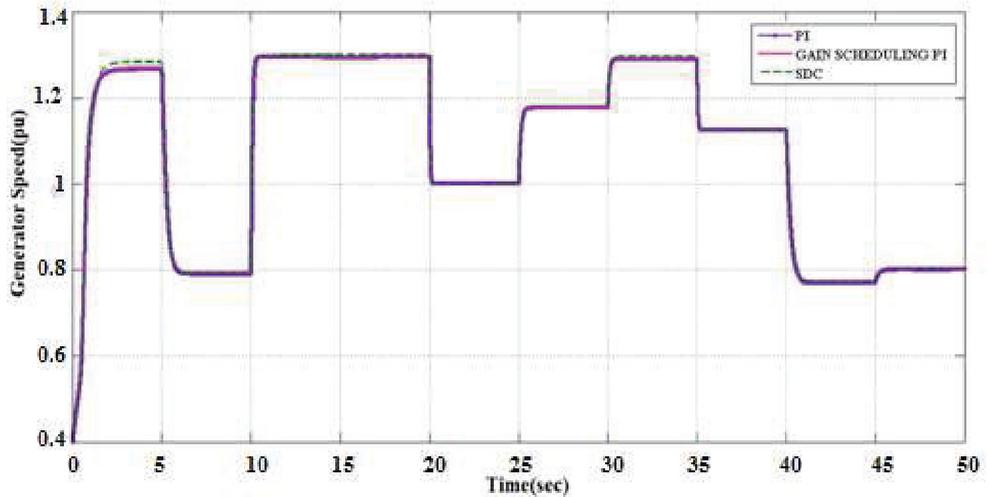
Figure 19 Generator speed of DFIG based WECS.

Figure 20 Real power of DFIG based WECS with PI and gain scheduling PI controller.

Figure 21 Real power of DFIG based WECS with PI, gain scheduling PI and stochastic distribution controllers.

Figure 22 DFIG based WECS reactive power with PI, gain scheduling PI and stochastic distribution controllers.
5 Conclusion
This paper proposed a stochastic distribution control strategy for DFIG based WECS. The proposed controller generator speed is strong against uncertain wind speeds by controlling the real and reactive power. It maximizes the real power of DFIG based WECS moreover attenuates the fluctuations to huge extent. Simultaneously, it reduces the reactive power fascinated from grid. It enhances the power quality of generated electrical power by WT with DFIG. It has a desirable dynamic response and ensures the closed loop stability on entire wind speed operating region. It increases the mechanical parts life expectancy of the system and also guarantees the safe and acceptable operation of WECS.
References
[1] J. Smith. (2005). Winds of change issues in utility wind integration – Guest editorial. IEEE Power and Energy Magazine. 3, pp. 20–25.
[2] E. Muhando, T. Senjyu, K. Uchida, H. Kinjo. & T. Funabashi. (2010). Stochastic inequality constrained closed-loop model-based predictive control of MW-class wind generating system in the electric power supply. IET Renewable Power Generation. 4, pp. 23.
[3] F.D. Bianchi, H. De Battista. & R.J. Mantz. (2006). Wind turbine control systems: principles, modelling and gain scheduling design. Springer Science & Business Media.
[4] I. Munteanu, A.I. Bratcu, N.A. Cutululis. & E. Ceanga. (2008). Optimal control of wind energy systems: towards a global approach. Springer Science & Business Media.
[5] J. Zhou, H. Yue, J. Zhang. & H. Wang. (2014). Iterative Learning Double Closed-Loop Structure for Modeling and Controller Design of Output StochAstic Distribution Control Systems. IEEE Transactions on Control Systems Technology. 22, pp. 2261–2276.
[6] B. Hamane, M. Benghanemm, A. Bouzid, A. Belabbes, M. Bouhamida. & A. Draou. (2012). Control for Variable Speed Wind Turbine Driving a Doubly Fed Induction Generator using Fuzzy-PI Control. Energy Procedia. 18, pp. 476–485.
[7] E. Bossanyi. (2000). The Design of closed loop controllers for wind turbines. Wind Energy. 3, pp. 149–163.
[8] I. Munteanu, N. Cutululis, A. Bratcu. & E. Ceangă. (2005) Optimization of variable speed wind power systems based on a LQG approach. Control Engineering Practice. 13, pp. 903–912.
[9] F.D. Bianchi, H. De Battista. & R. J. Mantz. (2007). Wind turbine control systems: principles, modelling and gain scheduling design. Springer Science & Business Media.
[10] F. Bianchi, R. Mantz. & C. Christiansen. (2004). Control of variable-speed wind turbines by LPV gain scheduling. Wind Energy. 7, pp. 1–8.
[11] K. Bedoud, M. Ali-rachedi, T. Bahi. & R. Lakel. (2015). Adaptive Fuzzy Gain Scheduling of PI Controller for Control of the Wind Energy Conversion Systems. Energy Procedia. 74, pp. 211–225.
[12] M. Soliman, O. Malik. & D. Westwick. (2011). Multiple Model Predictive Control for Wind Turbines With Doubly Fed Induction Generators. IEEE Transactions on Sustainable Energy. 2, pp. 215–225.
[13] C. Sathish. & K.B. Mohanty. Performance analysis of doubly-fed induction generator in wind energy conversion system. M Tech Thesis, National Institute of Technology.
[14] A. Hansen, P. Sørensen, F. Iov. & F. Blaabjerg. (2004). Control of Variable Speed Wind Turbines with Doubly-Fed Induction Generators. Wind Engineering. 28, pp. 411–432.
[15] T. Ghennam, E. Berkouk. & B. Francois. (2009). Modeling and control of a Doubly Fed Induction Generator (DFIG) based Wind Conversion System. 2009 International Conference on Power Engineering, Energy and Electrical Drives.
[16] B.K. Bose. (1986). Power electronics and AC drives.
[17] B. Wu, Y. Lang, N. Zargari. & S. Kouro. (2011). Power conversion and control of wind energy systems. John Wiley & Sons.
[18] G. Abad, M. Rodriguez, G. Iwanski. & J. Poza. (2010). Direct Power Control of Doubly-Fed-Induction-Generator-Based Wind Turbines Under Unbalanced Grid Voltage. IEEE Transactions on Power Electronics. 25, pp. 442–452.
[19] S. Taher, M. Farshadnia. & M. Mozdianfard. (2013). Optimal gain scheduling controller design of a pitch-controlled VS-WECS using DE optimization algorithm. Applied Soft Computing. 13, pp. 2215–2223.
[20] L. Guo. & H. Wang. (2010). Stochastic distribution control system design: a convex optimization approach. Springer Science & Business Media.
[21] M. Brown. & C.J. Harris. (1994). Neurofuzzy adaptive modelling and control. Prentice Hall.
[22] H. Wang. (2002). Minimum entropy control of non-Gaussian dynamic stochastic systems. IEEE Transactions on Automatic Control. 47, pp. 398–403.
[23] H. Wang. (2002). Minimum entropy control of non-Gaussian dynamic stochastic systems. IEEE Transactions on Automatic Control. 47(2), pp.398-403.
[24] M. Ren, J. Zhang, Y. Tian. & G. Hou. (2014). A Neural Network Controller for Variable-Speed Variable-Pitch Wind Energy Conversion Systems Using Generalized Minimum Entropy Criterion. Mathematical Problems in Engineering. 2014, pp. 1–9.
[25] J.C. Principe. (2010). Information theoretic learning: Renyi’s entropy and kernel perspectives. Springer Science & Business Media.
[26] M. Kárný. (1996). Towards fully probabilistic control design. Automatica. 32, pp. 1719–1722.
Biographies

Vijayalaxmi Munisamy received B.E Degree in EEE from RVS College of Engineering, Dindigul, affliated to Madurai Kamaraj University, Tamilnadu in 2000. M.Tech Degree in Process Control and Instrumentation from National Institute of Technology, Trichy, affiliated to Bharathidasan University, Tamilnadu in 2002. She is working as Assistant Professor in the Department of EEE, College of Engineering, Guindy, Anna University, Chennai. Completed Ph.D. in Control Systems from Faculty of Electrical and Electronics Engineering, Thiagarajar College of Engineering, Madurai, Anna University in 2018. Her research interest includes control systems, Renewable Energy, Electrical Machines and Measurement and Instrumentation.

Nayagam Shanmuga Vadivoo received B.E Degree in EEE from Thiagarajar College of Engineering, Madurai, Tamilnadu, in 1993. M.E Degree in Power Systems from Thiagarajar College of Engineering, Madurai, Tamilnadu in 1994. Completed Ph.D in the Faculty of Electrical and Electronics Engineering from Madurai Kamaraj University, Tamilnadu in 2009. She is working as Professor in the Department of EEE, Thiagarajar College of Engineering, Madurai, Tamilnadu. Her research interest includes Power systems, Renewable Energy, Distributed Generation and soft computing techniques.

Vaithilingam Devasena received B.E degree in Electronics and Instrumentation Engineering from Arunai Engineering College, Thiruvannamalai, Tamilnadu in 2012. M.E degree in Control and Instrumentation from College of Engineering, Guindy, Anna Univesity, Chennai in 2016. Her research interest includes Control systems, Measurements and Instrumentation and Renewable Energy.
Distributed Generation & Alternative Energy Journal, Vol. 35_4, 307–330.
doi: 10.13052/dgaej2156-3306.3544
© 2021 River Publishers