Learning-based Fractional Order PID Controller for Load Frequency Control of Distributed Energy Resources Including PV and Wind Turbine Generator
Mohsen Babaei1 and Mohsen Hadian2,*
1Shahrood University of Technology, Iran
2University of Saskatchewan, Canada
E-mail: mohsen.babaei.89.55@gmail.com
*Corresponding Author
Received 30 May 2021; Accepted 22 May 2022; Publication 22 July 2022
Abstract
Due to the ever-increasing penetration of renewable resources, Frequency control of microgrids has recently been received special consideration from researchers. The continual supply of load consumption is the major issue of standalone microgrids due to the high penetration of renewable resources. Furthermore, microgrids suffer from low inertia against load changes due to their small size and unpredictable load interruption. In addition to the above-mentioned issues, the uncertain and intermittent behaviors of renewable resources cause problems to keep the balance between load and generation sides. Hence, it is very important to consider novel control methods for keeping balance and consequently control of frequency deviation. In this research, a novel learning-based fractional-order controller is proposed to control the frequency of microgrids including micro-turbines, photovoltaic panels, and wind turbines in order to increase system stability and reduce frequency fluctuation time. The efficiency of this controller has been compared with conventional methods in the simulation and result section.
Keywords: Microgrid, Frequency Control, Renewable resource.
1 Introduction
Owning to the low inertia aspect of microgrids, the energy supply of such grids has posed some challenges. In other words, the changing ratio of demand to energy generation is very high, especially in stand-alone microgrids. Furthermore, the most contribution of microgrids’ energy generation is provided by renewable energy resources, which have intermittent and uncertain behavior. Therefore, there are two main issues for controlling microgrids: (1) the high changing rate of load consumption, due to the size of microgrids (2) uncertain and intermittent energy sources [1–3]. The frequency control of microgrids is more challenging than frequency control of power grids because of low inertia against load. A large frequency change can cause equipment damage, transmission lines overload, protection plan interference, and ultimately power system instability [4]. The imbalance between load and generation causes a frequency deviation in power systems [5]. If an appropriate control method is not adopted, it can destabilize the power system or create a permanent state error in the frequency. In other words, the grid frequency is set more or less than the nominal value after changing the load. From this point of view, the balance between active generating power and electrical load consumption is crucial especially for microgrids containing renewable sources [6, 7].
In the past, various methods have been proposed to control the frequency of different power grids, including large systems, distribution systems, and microgrids. One of the most common classical controllers is the PI controller. These types of controllers have proportional and integral gains, which are appropriately determined by using the Bode diagram, Nyquist diagram, and Root Locus diagram. The error integral is usually used as the control signal in the PI controller. These types of controllers are very simple and can easily be implemented in practice, but they do not have a proper dynamic response and are out of the optimal state whenever the operating point of the system changes [8]. Another control method that has been utilized in such systems is the adaptive controller. In [9] the author has considered changes in system parameters and used the reduced-order adaptive controller to control Multi-zone frequency. Thus, they achieved an effective simplification in the design of this type of controller. In [10], a fuzzy controller method has been used to determine the gain of a conventional PI controller and to determine the weighting matrix of an optimal controller. In that paper, the Sugino fuzzy inference is used to estimate the controller parameters and it is finally shown that the system response in the presence of the adaptive controller is improved compared to the classical one. Nevertheless, adaptive controllers usually require an accurate model and a complex parameter estimator. Therefore, these actual limitations of this type of controller can reduce the efficiency of them.
Robust control methods have also received consideration from researchers to regulate the frequency deviation of power grids. In robust controllers, the target goal is not only having a system with a suitable dynamic response but also having a system with proper performance against parameters uncertainty. In [11], Riccati equations based on robust control have been used to control the frequency. Thus, it has improved the stability characteristics of the system. In [12], in addition to the uncertainty in the parameters, the paper has also addressed uncertainty in the model and has indicated that attention to unmodeled dynamics is of great importance. Although robust control methods contain a good physical understanding of power systems, the desired results may change with the presence of nonlinear elements such as governor limiters and turbines. Moreover, the robust control method results in high-order controllers that are not suitable for practical operation in power systems. Therefore, in recent decades, most of the presented articles have combined this method with other methods.
One of the control methods that has been favored by researchers in this field is intelligent methods including fuzzy-based controllers and neural networks. Artificial neural networks (ANNs) are very appropriate to control nonlinear systems owing to their ability to learn nonlinear patterns, especially when the range of change of operating points is nonlinear. Numerous articles have been presented in this regard. In [13], a multilayer neural network with a post-diffusion training algorithm has been used to control the system. This type of controller has achieved better control in single-area and multi-area models in comparison with the PI controllers. In [14], the author has described the dynamic neural network which has dynamic neurons, and has compared the dynamic and classical neural networks. Finally, the improvement of the results in the dynamic neural network compared to its conventional state has been indicated. In [15], a simple PI fuzzy controller with an implementable structure has been applied to eliminate frequency error and to improve the system stability characteristic, such as overshoot, undershoot, and settling time. Article [16] demonstrates the efficiency of fuzzy for frequency control in the presence of nonlinear and limiting factors such as boiler dynamics.
In this research, a new learning-based fractional order controller has been proposed to enhance the grid stability and to improve the system recovery time after the load change. Furthermore, for indicating the effectiveness of the proposed controller, the performance of this controller has been compared with traditional control methods. The results show that this type of control strategy has great advantages such as increasing response speed, enhancing stability, and reducing steady-state error.
In the following of the paper, the second and third section is dedicated to modeling the system and equipment and describing the proposed method, respectively. The simulation and results are presented in the fourth section and the conclusion is given in the last section.
2 System Modeling
The following figure depicts the general schematic of the proposed model which includes resources and micro-turbines on the generation side and household load on the consumption side.
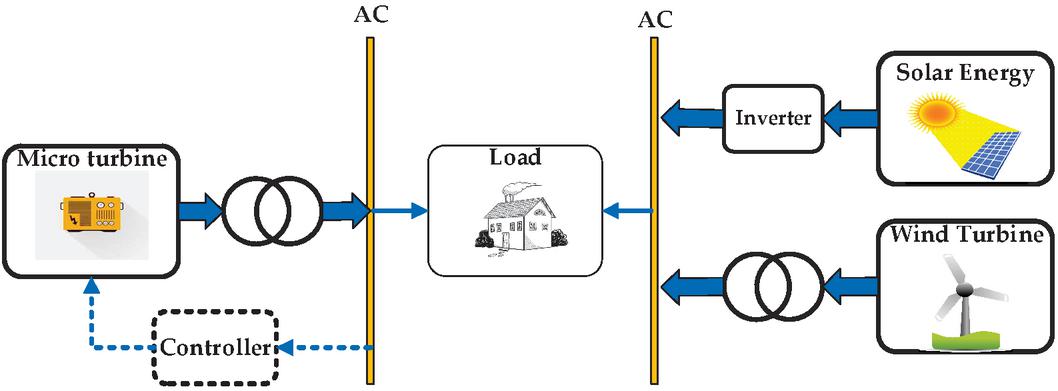
Figure 1 General schematic of the proposed model.
The model of each of the following components is introduced in detail in the following sections.
2.1 Load Model and Generation
The load in the power system includes various electrical devices. Unlike resistive loads, motor loads are sensitive to frequency changes. The load-speed characteristic of a compound load is approximated as follows [17].
| (1) | |
| (2) |
is the non-frequency sensitive load change and is the sensitive frequency load change. The load-generation model block diagram is presented in the figure below.
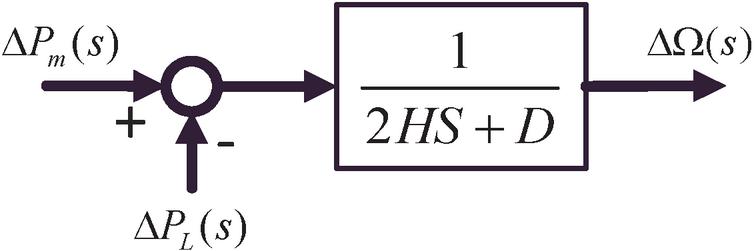
Figure 2 Non-frequency sensitive load and generation model.
2.2 Primary Actuator Model
The primary actuator can be a gas or steam turbine. This model relates changes in output mechanical power to changes in the steam valve position. The simplest model of the primary actuator is modeled as follows.
| (3) |
The block vision of the turbine is as follows. is turbine’s time constant.
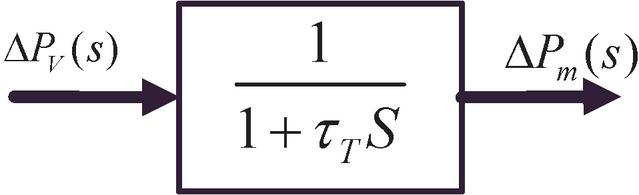
Figure 3 Primary actuator model.
2.3 Speed Governor Model
Frequency reductions are compensated by the governor. The governor adjusts the turbine speed by adjusting the turbine inlet valve. The relation of the Laplace field is as follows [18].
| (4) |
Considering a linear function and a time constant, we will have the following relation.
| (5) |
The speed governor block diagram according to the above equations is as follows.
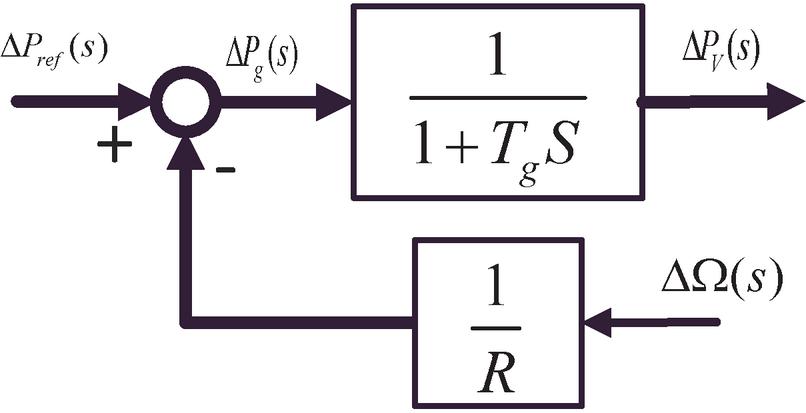
Figure 4 Speed governor block diagram.
2.4 Renewable Resources Model
The wind turbine and PV models are described in the following figures with specified time constants, , , and mean inverter, interconnection device, and wind turbine time constant, respectively [4].

Figure 5 PV model.

Figure 6 Wind turbine model.
3 Control Method
3.1 FOPID Controller
In this research, a control method based on fractional-order mathematics and a fractional-order controller have been utilized. The equation of a fractional-order controller is as follows [19].
| (6) |
This controller in Laplace space is presented as follows.
| (7) |
It is obvious that the ranks of derivatives and integrators in this type of controller are of a fractional type and it is a number between 0 and 2. Therefore, this controller contains 5 variables whose values must be specified. One of its main advantages is the enhancement of stability by using fractional order capability. The general schematic of this controller is shown in the figure below.
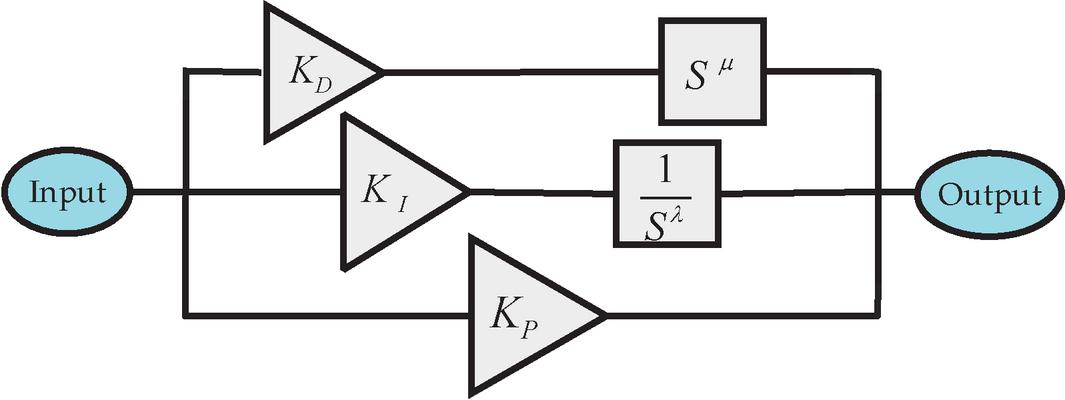
Figure 7 General schematic of FOPID controller.
3.2 Recurrent Adaptive Neural Fuzzy Inference Systems (RANFIS)
The RANFIS provides the best parameters for the fractional-order controller by considering the parametric uncertainties of the microgrid. The inference of the proposed RANFIS is defined based on Sugeno’s definition that is given below:
If is , and is , then
If is , and is , then
The structure of the afore-mentioned RANFIS consists of a number of layers in which the output is produced from the coordination between inputs signals and some practical weights. The structure of a sample RANFIS network is depicted in Figure 8 [20].
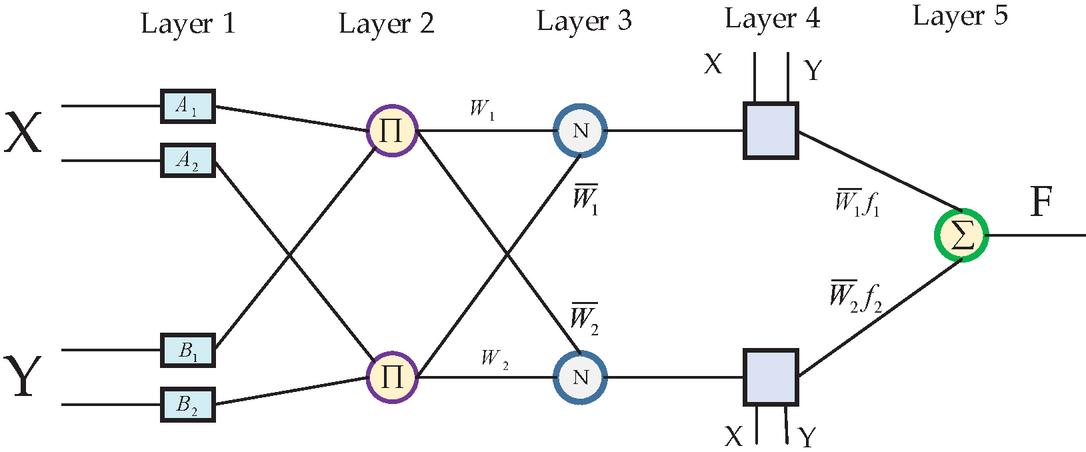
Figure 8 Multi-layer RANFIS network.
Layer 1. In this layer fuzzy sets are generated from input signals. Furthermore, this layer is called the fuzzification layer.
| (8) | ||
| (9) |
is the output of layers, is the membership function, and are input signals.
Layer 2. The multiplication of incoming signals is created in the second layer:
| (10) |
Layer 3. The responsibility of firing strengths normalization lies with layer3.
| (11) |
Layer 4. Defuzzification layer.
| (12) |
Layer 5. The output is created in the last layer.
| (13) |
The backpropagation (BP) method is utilized to learn RANFIS. At the first step, weights are selected randomly. Then weights are constantly updated by considering the following objective function, in which and are real and desired outputs, respectively.
| (14) |
For minimizing the objective function, the deviation of weights should be opposite to the deviation of the computed error:
| (15) |
Where is a constant value that is determined by the user. The error of each layer is presented by . Finally, the updating weights equation is given below, this equation is provided by utilizing the chin rule:
| (16) |
4 Simulation and Results
As mentioned previously, an adaptive structure based on RANFIS has been used for tuning of FOPID controller. In this research 6 patterns, which are presented in Table 1, have been provided to learn of RANFIS. The general structure of the proposed control approaches is depicted in Figure 1.
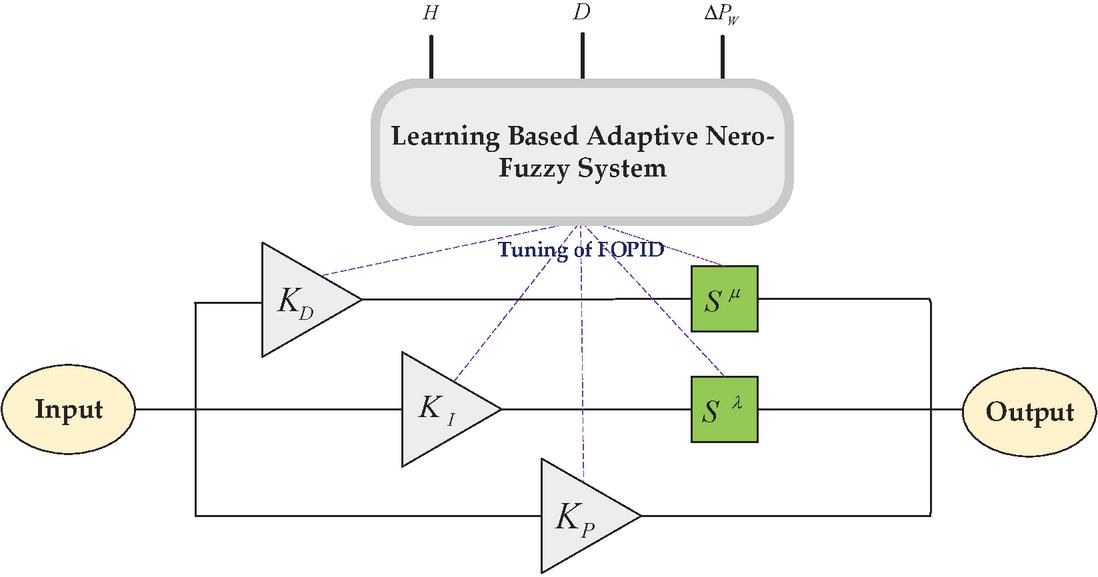
Figure 9 Structure of the proposed control strategy.
Table 1 Learning patterns of RANFIS
| Patterns | ||||||||
| 1 | 0.1 p.u | 0.29 | 0.508 | 0.182 | 0.53 | 0.48 | ||
| 2 | 0.8 p.u | 0.32 | 0.48 | 0.167 | 0.535 | 0.47 | ||
| 3 | 0.8 p.u | 0.34 | 0.456 | 0.161 | 0.542 | 0.45 | ||
| 4 | 0.6 p.u | 0.41 | 0.4365 | 0.152 | 0.547 | 0.44 | ||
| 5 | 0.5 p.u | 0.43 | 0.421 | 0.144 | 0.552 | 0.42 | ||
| 6 | 0.5 p.u | 0.45 | 0.4 | 0.142 | 0.558 | 0.4 | ||
| Nominal Value of N. Nominal Value of D. |
||||||||
The efficiency of the proposed controller has been evaluated through 3 case studies.
4.1 Case1 – Nominal Value
In this case, all parameters have their nominal value, and there are not any uncertainties. The nominal values of the system are given in Table 2.
Table 2 Nominal values of the system
| Parameter | Value | Description |
| 0.016 | Coefficient of load | |
| 0.17 | Inertia value | |
| 2.5 | Droop constant | |
| 0.08 | The time constant of Governor | |
| 0.4 | Time constant generator | |
| 5.8 | Wind turbine generator inertia | |
| 0.2 | Wind turbine generator time constant | |
| 1.8 | Proportional gain of wind turbine generator | |
| 0.13 | Integral gain of wind turbine generator | |
| 0.005 | Interconnection time constant |
In the first case, the FOPID with control parameters which have been introduced in the first row of Table 1 is compared with an optimal PID controller. The frequency regulation responses of controllers during 0.3 p.u load changes are indicated in Figure 10, in which it is evident that the FOPID controller has better performance than an optimal PID controller. The FOPID controller has a smaller rise time, settling time, and minimum frequency deviation.
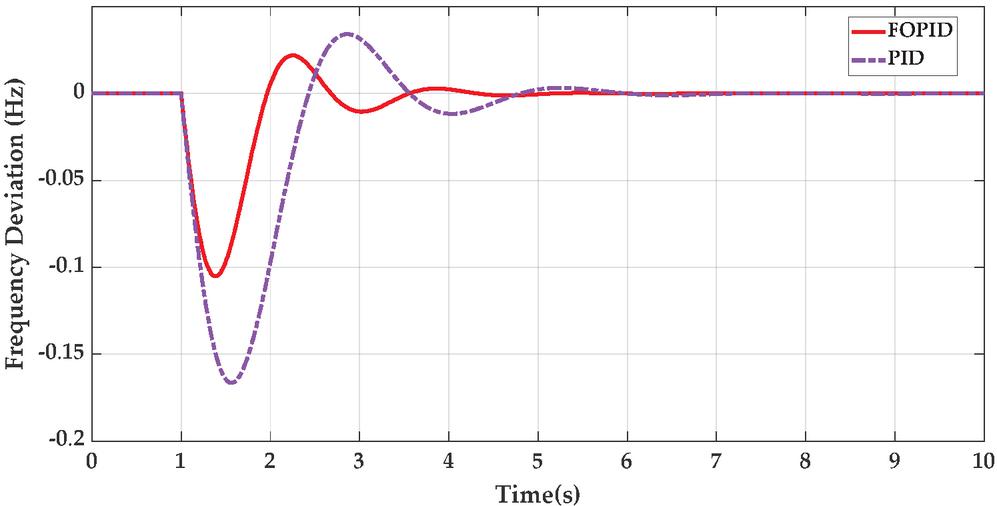
Figure 10 Frequency deviation for nominal value.
For indicating the effectiveness of the FOPID controller, the following criteria have been presented:
• Settling time: the time is needed for the response to reach and stay at a range of predefined percentage (approximately 2%) of the steady-state value.
• Rise time: the time is needed for the response to increase from 10% to 90% of the final value.
• Maximum Deviation: the maximum value of the deviation of each response
• : this criterion means integral absolute error and is calculated by:
| (17) |
Figure 11 shows that the FOPID controller has a smaller settling time and rise time than the optimal PID controller. In other words, the frequency deviation is damped sooner by the FOPID controller.
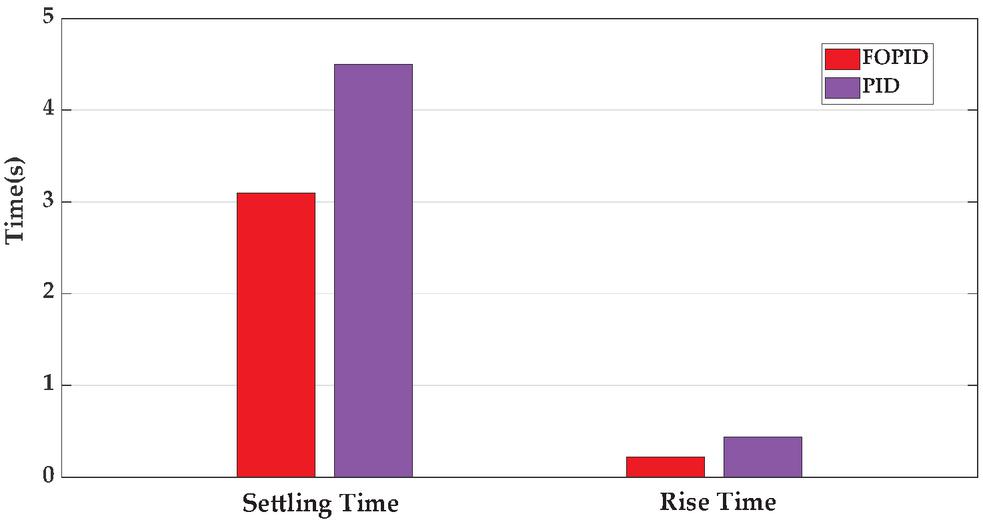
Figure 11 Settling time and rise time comparison (case1).
A glance at Figure 12 reveals that the maximum deviation of the FOPID controller is smaller than the PID controller. Furthermore, the integral absolute error of FOPID’s response is lower than the PID controller. At the conclusion of this case, it is important to mention that the desired FOPID has more effective than an optimal PID.
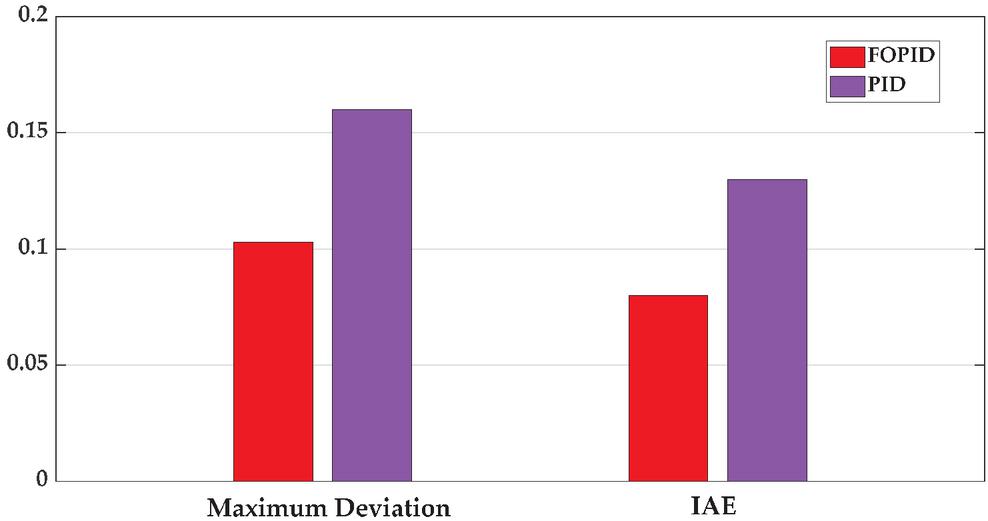
Figure 12 Maximum deviation and IAE (case1).
4.2 Case2 – Considering Uncertainties
In this case, parametric uncertainties have consequence values: , , . For these uncertainties, the FOPID controller parameters have been tuned by RANFIS ( , , ). Figure 13 depicts that the proposed control method provides the best reaction to the frequency deviation. The deviation has been damped by learning the FOPID controller after approximately 3 seconds. Moreover, by considering the maximum deviation of frequency, this controller has an acceptable response to an immediate 0.3 p.u. load change. Generally, the following comprehensive comparison reveals that the suggested control strategy has improved the performance of conventional control approaches.
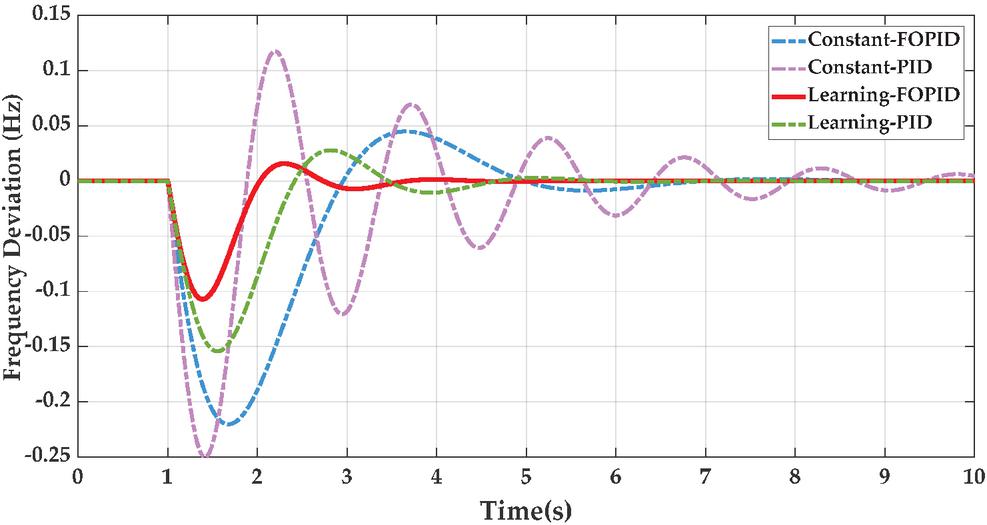
Figure 13 Frequency deviation by considering system’s uncertainties.
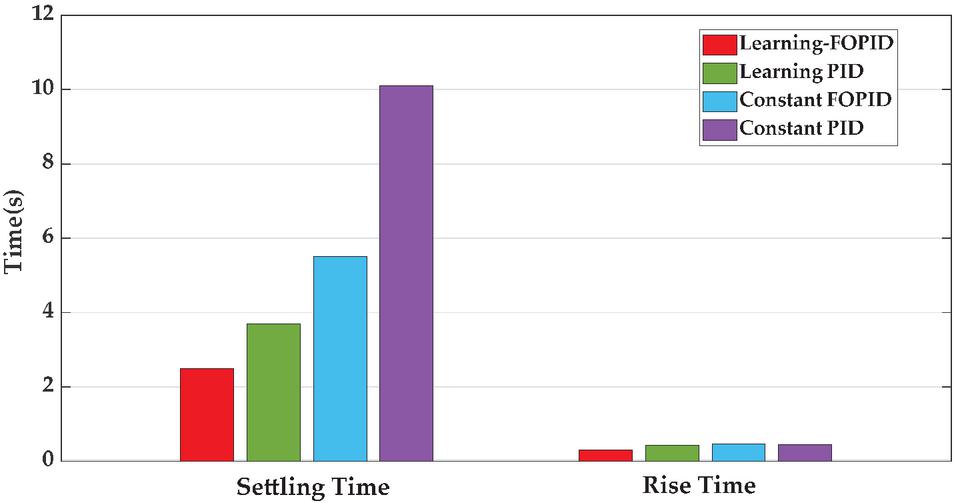
Figure 14 Settling time and rise time comparison (case2).
Comprehensive comparisons have been given in Figures 14 and 15. It is concluded from both of them that learning-based FOPID has the best performance among all controllers. It is important to emphasize that the learning-based controllers performances present the effectiveness of this control strategy.
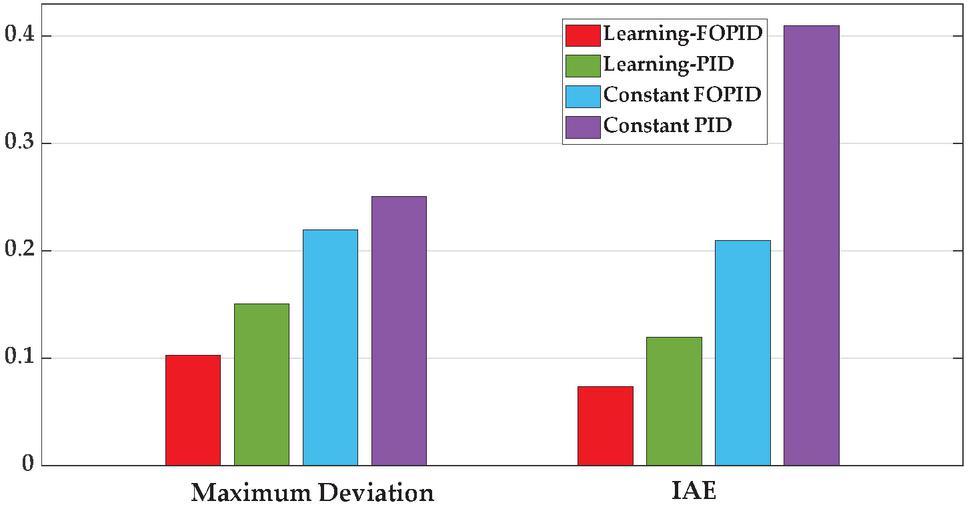
Figure 15 Maximum deviation and IAE (case2).
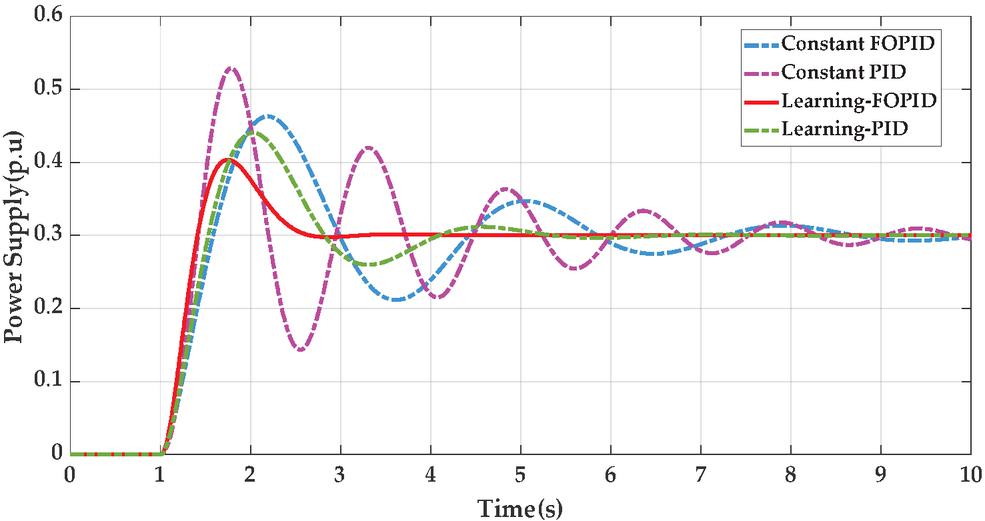
Figure 16 Power supply reaction of controllers.
The power generation stations including microturbine, PV, and wind generator have responsibility to compensate for the lack of power supply during demand growth. In this study, a 0.3 p.u increase in demand should be compensated by power generation stations. Figure 16 depicts that the proposed control strategy has a more rapid reaction to provide the power supply.
4.3 Case3 – Considering Measurement Noise
In this study, the frequency value should be measured by frequency measurement, and then are transmitted to the control center. A band-limited white noise has been applied in the output of frequency measurement. Figure 17 indicates that the FOPID controller provides a smaller frequency deviation against white noise and has better performance for damping.
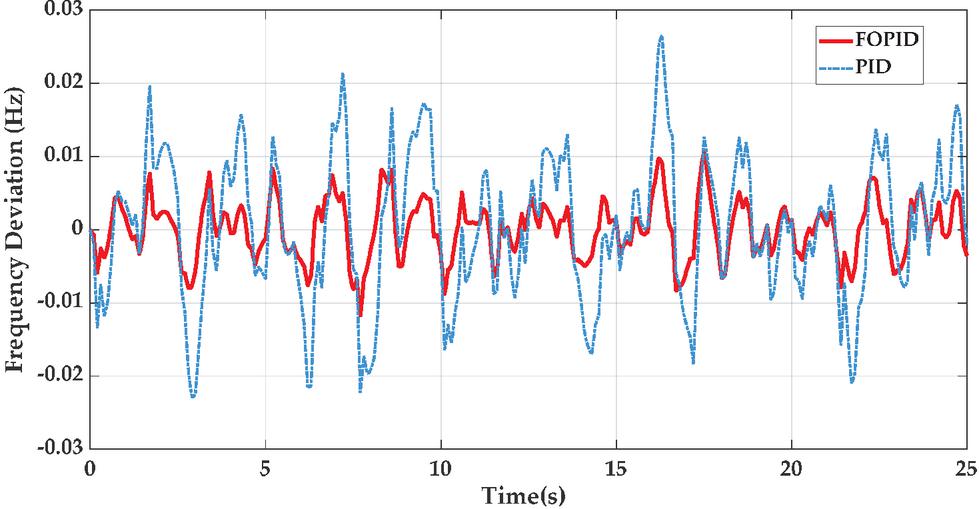
Figure 17 Frequency deviation by considering measurement noise.
5 Conclusion
Frequency stability is an important issue in power grids, especially in nano and microgrids with low inertia. In this research, a learning-based FOPID controller has been proposed for the frequency control of a hybrid microgrid and has been compared with other traditional controllers through 3 case studies. Finally, the effectiveness of this control strategy has been shown by simulation, moreover, frequency responses and criteria results reveal that the learning-based FOPID controller has the best performance among all of the other controllers.
References
[1] A. Qazi et al., “Towards sustainable energy: a systematic review of renewable energy sources, technologies, and public opinions,” IEEE Access, vol. 7, pp. 63837–63851, 2019.
[2] G. Notton et al., “Intermittent and stochastic character of renewable energy sources: Consequences, cost of intermittence and benefit of forecasting,” Renewable and sustainable energy reviews, vol. 87, pp. 96–105, 2018.
[3] M. Babaei, E. Azizi, M. T. H. Beheshti, and M. Hadian, “Data-Driven load management of stand-alone residential buildings including renewable resources, energy storage system, and electric vehicle,” Journal of Energy Storage, vol. 28, p. 101221, 2020.
[4] H. Bevrani, F. Habibi, P. Babahajyani, M. Watanabe, and Y. Mitani, “Intelligent frequency control in an AC microgrid: Online PSO-based fuzzy tuning approach,” IEEE transactions on smart grid, vol. 3, no. 4, pp. 1935–1944, 2012.
[5] H. Bevrani, H. Golpîra, A. R. Messina, N. Hatziargyriou, F. Milano, and T. Ise, “Power system frequency control: An updated review of current solutions and new challenges,” Electric Power Systems Research, vol. 194, p. 107114, 2021.
[6] A. Kumar and G. Shankar, “Load frequency control assessment of tidal power plant and capacitive energy storage systems supported microgrid,” IET Generation, Transmission & Distribution, vol. 14, no. 7, pp. 1279–1291, 2020.
[7] Y. Hirase, Y. Ohara, and H. Bevrani, “Virtual synchronous generator based frequency control in interconnected microgrids,” Energy Reports, vol. 6, pp. 97–103, 2020.
[8] V. Gholamrezaie, M. G. Dozein, H. Monsef, and B. Wu, “An optimal frequency control method through a dynamic load frequency control (LFC) model incorporating wind farm,” IEEE Systems Journal, vol. 12, no. 1, pp. 392–401, 2017.
[9] C. T. Pan and C. M. Liaw, “An adaptive controller for power system load-frequency control,” IEEE Transactions on Power Systems, vol. 4, no. 1, pp. 122–128, 1989.
[10] J. Talaq and F. Al-Basri, “Adaptive fuzzy gain scheduling for load frequency control,” IEEE Transactions on power systems, vol. 14, no. 1, pp. 145-150, 1999.
[11] Q. P. Ha and H. Trinh, “A variable structure-based controller with fuzzy tuning for load-frequency control,” International Journal of power and energy systems, vol. 20, no. 3, pp. 146–154, 2000.
[12] D. Das, M. L. Kothari, D. P. Kothari, and J. Nanda, “Variable structure control strategy to automatic generation control of interconnected reheat thermal system,” 1991, vol. 138: IET, 6 ed., pp. 579–585.
[13] L. C. Saikia, “AGC of a three area thermal system using MLPNN controller: A preliminary study,” 2012: IEEE, pp. 1–4.
[14] K. Sabahi and M. Teshnehlab, “Recurrent fuzzy neural network by using feedback error learning approaches for LFC in interconnected power system,” Energy Conversion and Management, vol. 50, no. 4, pp. 938–946, 2009.
[15] C. S. Chang and W. Fu, “Area load frequency control using fuzzy gain scheduling of PI controllers,” Electric Power Systems Research, vol. 42, no. 2, pp. 145–152, 1997.
[16] A. Fathy, A. M. Kassem, and A. Y. Abdelaziz, “Optimal design of fuzzy PID controller for deregulated LFC of multi-area power system via mine blast algorithm,” Neural Computing and Applications, vol. 32, no. 9, pp. 4531–4551, 2020.
[17] H. Saadat, Power system analysis. McGraw-hill, 1999.
[18] H. Bevrani, Robust power system frequency control. Springer.
[19] E. Anbarasu and A. R. Basha, “An improved power conditioning system for grid integration of solar power using ANFIS based FOPID controller,” Microprocessors and Microsystems, vol. 74, p. 103030, 2020.
[20] K. Premkumar, B. V. Manikandan, and C. A. Kumar, “Antlion algorithm optimized fuzzy PID supervised on-line recurrent fuzzy neural network based controller for brushless DC motor,” Electric Power Components and Systems, vol. 45, no. 20, pp. 2304–2317, 2017.
Biographies

Mohsen Babaei received the bachelor’s degree in electrical engineering from Shomal Amol University in 2012, the master’s degree in control engineering from the Shahrood University of Technology in 2015. He is currently working as a researcher at Iran National Electricity Distribution Company, and studying as a Ph.D. student at the Shahrood University of Technology. His research areas include control theory, power system analysis, and renewable energy.

Mohsen Hadian received the bachelor’s degree in electrical engineering from Sahand university of technology in 2011, the master’s degree in control engineering from the Petroleum University of Technology in 2013, and the philosophy of doctorate degree in mechanical engineering from the University of Saskatchewan, respectively. He is currently working as a Research Associate at the University of Saskatchewan. His research areas include Artificial Intelligence, Control Theory, and Renewable Energy.
Distributed Generation & Alternative Energy Journal, Vol. 37_6, 1755–1772.
doi: 10.13052/dgaej2156-3306.3762
© 2022 River Publishers