Stability Improvement of Wind Farm by Utilising SMES and STATCOM Coupled System
Sonia Dhiman* and Anil Kumar Dahiya
Department of Electrical Engg., NIT Kurukshetra, India
E-mail: sonia.ee.nitkkr@gmail.com
*Corresponding Author
Received 27 August 2022; Accepted 23 December 2022; Publication 16 May 2023
Abstract
The rising number of intermittent wind energy-based generation systems in power systems affects the grid system’s stability and reliability. These wind generators reduce the inertia of the system, thus making the system sensitive to grid disturbances. Due to their unique features, the Doubly Fed Induction Generators (DFIG) wind generators are being connected at a large scale. The Energy Storage Device (ESD) offers a viable solution to the integration issues caused by variable-natured renewable energy sources. In this work, the Static Compensator (STATCOM) is attached to the Superconducting Magnetic Energy Storage (SMES) technology to strengthen the wind farm integrated grid system for better performance. The SMES is interlinked with the grid system via a power electronic interface (PEI) and chopper for the energy exchange. This work examines the functioning of the proposed STATCOM as PEI and three-level chopper control circuit based on fuzzy logic for the SMES system. The fuzzy logic based SMES with STATCOM (STAT-SMES) is proposed for a DFIG-based integrated system under different fault conditions. This coupled controller can compensate for both real and reactive powers, improve voltage stability, and can damp power oscillations at a fast rate. The results have been compared without any controller, with STATCOM only, and with the proposed, fuzzy based SMES coupled to STATCOM using MATLAB. The simulation outcomes prove that coupling SMES to STATCOM is effective in handling wind farm integration issues in a better way than STATCOM.
Keywords: Double fed induction generator, STATCOM, SMES, reactive power compensation.
1 Introduction
The exhausting conventional energy resources, growing energy demand, and rising concern for global warming are essential issues encountered by almost all countries. The addition of unpredictable Renewable Energy Sources (RES) to address these issues is affecting the power system networks’ reliability and stability [1, 2]. Wind energy is getting more attention due to its abundance and technological advancement. The DFIG-based wind energy generation systems are becoming more popular as they can control power flows from the rotor and grid sides [3]. But they have low inertia which results in instability issues, which must be addressed [4, 5]. The various types of ESDs are proficient in transforming the present grids into smart grids with growing issues of new types of loads and generating stations. Due to their distinct characteristics and capabilities, ESDs can be utilized in different applications [6]. The SMES is an interesting ESD with a fast charging/discharging response, long life span, low losses, and high efficiency. That makes it an attractive choice for tackling various power utility challenges in the presence of RES [7].
The SMES in the wind energy-linked systems has shown quite an impressive contribution in stabilizing the system problems like regulating frequency variations, load levelling, and voltage stability [8]. Although the cost of SMES is very high with continuous research in the superconducting material and the optimization of design parameters, it can be reduced [9, 10]. The study shows that the point of interconnection of SMES also influences the operation of the system [11]. The sliding mode-controlled SMES can boost the considered network’s stability [12]. SMES are utilized for stabilizing wind farms under high-speed wind variations by fuzzy controlled chopper and hysteresis current control method for voltage source inverter [13]. SMES is used for power and voltage stability in wind systems with a fuzzy logic-controlled chopper of SMES under wind and fault variation [14]. SMES is connected with a fault current limiter in a DC microgrid system to improve the transient stability of the system [15]. The fractional order PI controlled technique has been used for the superconducting coil, which is placed between the rotor side and grid side converter of DFIG for improving low voltage ride through [16]. The coordinated control scheme using load angle variation has been implemented for SMES in [17] for the transient stability improvement of the system.
The Flexible AC Transmission System (FACTS) is an advanced power electronics-based technology for many utility applications, including wind generation systems [18–20]. The combination of FACTS technology and ESD is proficient in providing real and reactive power support, stability, and robustness to the transformative grid system [21]. The work in [22] shows that adding SMES with STATCOM improves systems’ performance, and the system oscillations are damped faster. The state space averaging technique is utilized in SMES for reliability and frequency control using combined controllers [23]. This coupled controller has been utilized to boost the available transfer capability of the network [24]. An artificial intelligence-based controller is implemented for SMES to increase the transient stability of Synchronous Generators (SG) in a multimachine system [25].
The literature study suggests that an elementary AC-DC inverter as VSI has been used in most of the work, and a basic buck chopper has been utilized. Most studies focus on the different control applications of the chopper circuit of SMES [11–17]. This coupled controller (STAT-SMES) has been utilized in fixed-speed wind generation systems [26], and applications still need to analyze for other RE systems. This work explores
• Coupled STATCOM and SMES controller for the stability enhancement of the DFIG wind farm at a large scale.
• Proposing a 3-level chopper circuit for enhancing the performance of SMES.
• Fuzzy logic-based control scheme is based on the DC voltage regulation of SMES.
• The results are compared without any controller, with only STATCOM, and with coupled fuzzy controlled STAT-SMES controller using MATLAB/Simulink.
• Comparison with current work shows that it’s performing better with the proposed control technique.
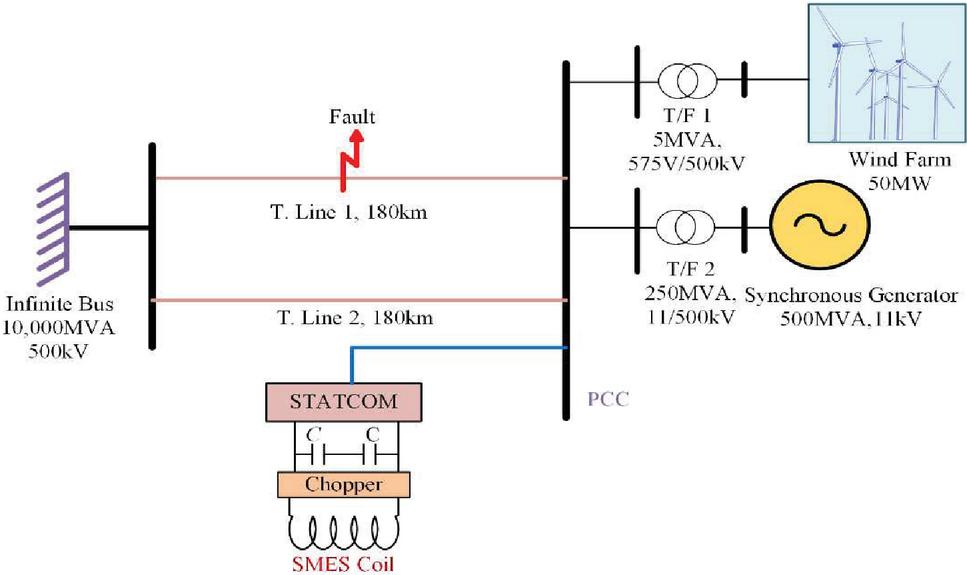
Figure 1 Test system understudy.
During any fault, this controller will spontaneously generate compensating real and reactive power for damping the oscillations quickly. The coupled STATCOM-linked SMES system is tested for improving the transient stability of SG (500 MW) and DFIG (50 MW) under different fault conditions. The fuzzy logic-based associated STAT-SMES controller performs better than STATCOM for stability enhancement of the whole system.
2 System Under Study
Figure 1 shows the test system used for investigating the effect of the coupled STAT-SMES controller. This system and its data have been taken from the research study presented in [25]. This test system has hybrid generation systems consisting of a DFIG wind farm of 50MW capacity and a 500MW Synchronous Generator (SG). At the Point of Common connection (PCC), DFIG and SG generation systems are connected through a transmission line. The coupled combination of STATCOM and SMES control unit is also interconnected at the PCC because this is the best location where this control unit can stabilize the entire system [11]. Table 1 displays the specifications of the DFIG, SMES, and STATCOM, whereas Table 2 shows the test system’s data. The model of SG and DFIG is based on the d–q axis reference frame [27, 28].
Table 1 Specifications of the DFIG, SMES, and STATCOM
| DFIG Generator (Total 50 MW) | SMES | STATCOM | |||
| Power rating | 1.5MW | Energy rating | 100 MJ | MVA | 100 MVAr |
| DC-link voltage | 1150V | Inductance | 2H | Voltage | 25000V |
| Rotor Res. | 0.016pu | Resistance | 0.01 | C | 3F |
| Stator Res. | 0.023pu | Current | 10kA | V | 19.3kV |
| Voltage | 575V | MVA | 100MVAr | ||
Table 2 Parameters of the test system
| Name | Specifications |
| Synchronous Generator | 500MVA, 11000V, 60Hz, [X 0.20, X 0.250, X 1.650, X 0.20, X 1.590, Xl 0.140, Rs 0.00450]pu, T 0.040s, T 4.50s |
| Transformer-1 | 5MVA, V/V 0.575/500kV, 60Hz, L L 0.0250pu, R R 0.008pu |
| Transformer-2 | 250MVA, V/V 11/500kV, 60Hz, L L 0.080pu, R R 0.0020pu |
| Transmission Line-1 | Length 30km, [R 0.1153(), C 11.3e(F), L 1.050e(H)] per km |
| Transmission Line-2 | Length 180km, [R 0.01273(), C 12.74e(F), L 0.9337e(H)] per km |
3 STATCOM and its Modelling
STATCOM is a Flexible AC Transmission System (FACTS) device with a shunt connection that is predominantly utilized for the reactive power compensation or volt-ampere reactive compensation. It can assist in recovering the performance of a power system’s operation by providing voltage support and improved power factor. It uses power electronics-based switching devices like Gate Turn Off (GTO)s or Insulated Gate Bipolar Transistors (IGBTs) for Voltage Source Inverter (VSI) for generating three-phase voltages [29]. The most recommended shunt FACTS device for utility applications is STATCOM due to its low dynamic response of less than 10 ms. STATCOM can work as a capacitor or inductor, depending on the system’s requirement. Figure 2 shows its control scheme based on the d-axis and q-axis components of current and voltage [29]. The system voltage V is in quadrature with the current allowing reactive power to be interchanged exclusively with the network. Whenever the system’s voltage drops because of a fault or disturbance, STATCOM injects or absorbs reactive energy, along with the transient stability improvement. The modeling and control scheme of STATCOM are referred from [30].
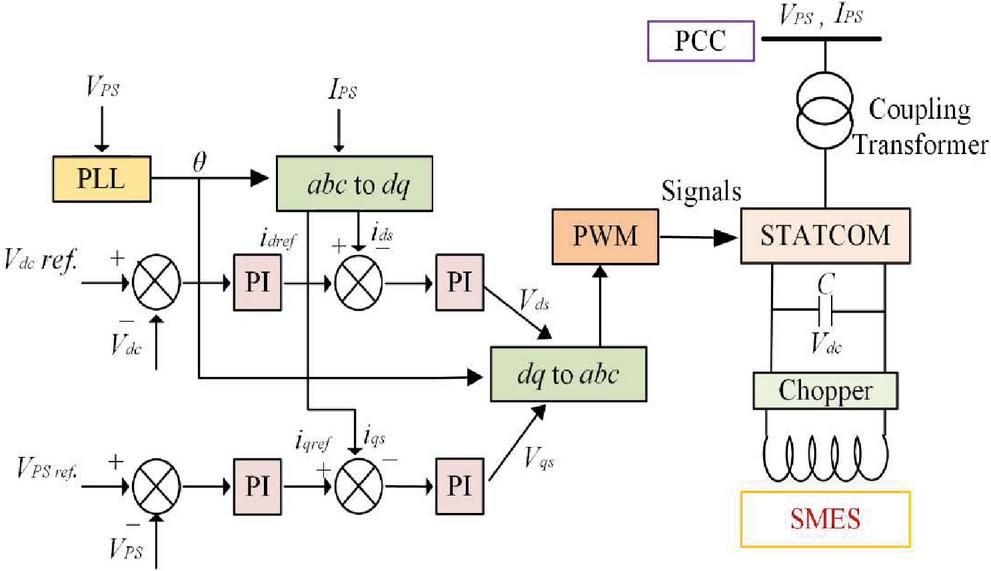
Figure 2 Control scheme of STATCOM.
As the value of V increases or decreases, the direction of reactive power exchange changes. If the output voltage of VSI is higher than the AC system voltage, the capacitor will provide reactive power, thus decreasing the voltage at the point of connection or vice-versa. The reactive current is represented by Equation (1), and the reactive power transfer between STATCOM and the network is expressed by Equation (2) [30].
| (1) | ||
| (2) |
is the output voltage of VSI, and is the AC system voltage at PCC, having a phase difference of angle between them. By a factor of /2, the input current lags the voltage drop across X. The direction of reactive power flow depends upon the magnitude of and . For , the VSI generates reactive power, and if , the VSI consumes reactive power.
| (3) |
Equation (3) represents active power flow . The flow of this power is toward the inverter if ; otherwise, if , the power flow toward the supply system. The fundamental component of is affected by the DC voltage which is regulated by the firing angle. This angle is usually set close to zero for the best performance. This indicates that STATCOM can work in any control operation mode, i.e., voltage control mode or VAR control mode. A STATCOM’s main components are a step-up coupling transformer, DC-AC power inverter, and DC capacitors. In this work, the 48-pulse STATCOM as voltage source inverter (VSI) acts as an interface between SMES and AC grid. The VSI based on GTO (Gate turn-off) is employed in this model. The STATCOM used in this work is a 48-pulse VSI formed by joining four modules of 12-pulse-3-level GTO-based inverters. The three levels increase the flexibility in changing output voltage magnitude. The zig-zag phase shifting transformers help harmonics nebulization by reducing total harmonic distortion to 3%, making it preferable for high voltage level transmission systems as there is no need for filters [23]. The voltage on the DC side () and voltage of the power supply () are related using the d-q reference frame, as shown below [23]:
| (4) | |
| (5) |
where represents a constant value linked to VSI; is the aggregate of all PSTs’ voltage ratios and conduction angle , where represents the dead angle.
| (6) |
where represents the phase difference between the output voltage of the VSI and the reference value.
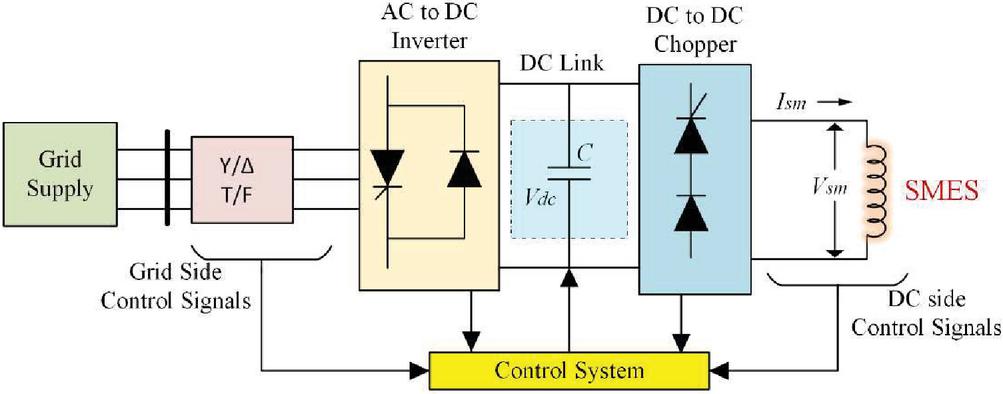
Figure 3 Basic arrangement of SMES.
4 SMES and its Modelling
SMES is a device that can store magnetic energy in a superconductive inductor coil from DC flowing through it. It includes a superconducting coil, a power electronics-based power conditioning system (PCS), and a refrigeration system (not shown), which maintains the critical temperature required by the coil for its superconductive state [8]. The DC current can charge and discharge the coil through PCS, thus controlling the flow of energy, as shown in Figure 3. The recent advancements in superconducting coil material and the type of PCS can lead to fast stabilization of the system within milliseconds. The charging of the coil and its discharging are controlled by the DC voltage . The magnitude of this DC voltage is regulated by adjusting the firing angle (). The SMES model equations are based on work [8]. is the voltage on the DC side.
| (7) |
here is the maximum no-load value across the SMES coil. The voltage and current of the SMES coil are related as follows:
| (8) |
Where the initial current value of the coil is . The magnetic energy storage capacity () of the coil and its power () can be calculated by the following equations:
| (9) | ||
| (10) |
Here represents the SMES coil’s voltage, and is the current flowing through the coil. The power or energy consumed or released by the SMES is a function of , whose magnitude will decide the direction of the flow of power through the SMES inductor coil. The current flow direction in the coil remains the same in both cases. For representing the model of the SMES, a large inductance is connected in series with negligible resistance, and the ripple effect and the harmonics are neglected on the DC side [13].
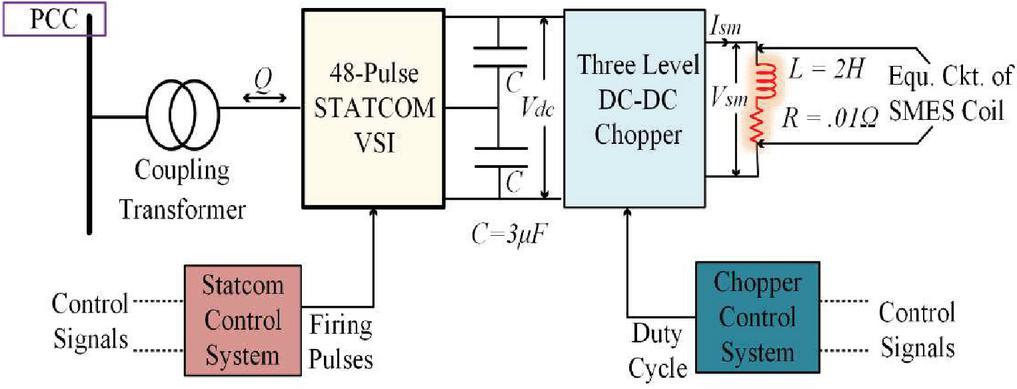
Figure 4 Proposed configuration of STAT-SMES controller.
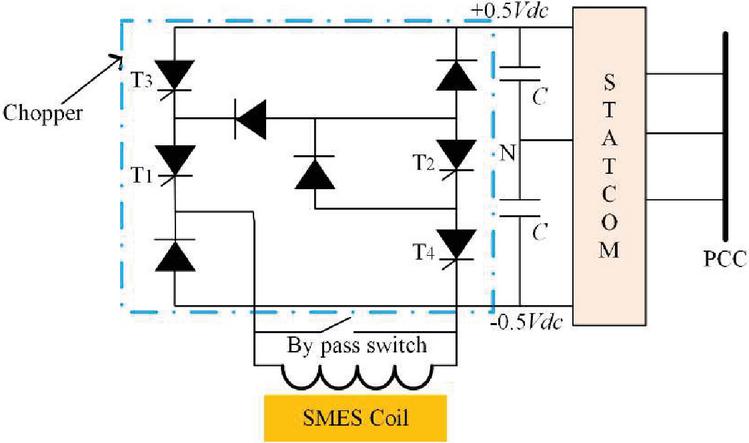
Figure 5 3-level chopper circuit.
5 Proposed Configuration of Controller
STATCOM is attached to the SMES through the DC capacitor link of the proposed three-level chopper, as shown in Figure 4. This chopper adjusts the duty cycle through the proposed control logic approach to hold onto the uniform value of DC voltage across the capacitor. The series arrangement of resistance R 0.01 and inductance L 2H is the equivalent circuit of SMES. For the sake of simplicity, the effect of mutual inductance and capacitance is neglected.
5.1 Proposed DC Chopper
The three-level chopper has a better dynamic response than the basic buck chopper. Its configuration in Figure 5 displays extra switching options that help in controlling the DC capacitor voltage with more flexibility. The three-level chopper can attain different output voltages of variable magnitudes, such as 0, , and , across the SMES. This chopper is capable of operating in buck mode, boost mode, and standby mode. These working modes can be achieved by turning on and off the mix arrangement of the switches T1, T2, T3, and T4. In charging mode, the voltages produced can be 0, , and ; in discharging mode, the produced voltages are 0, , and obtained across the SMES’s coil. The discharging mode indicates energy released by SMES, whereas it gets charged by absorbing energy from the system in the charging mode.
In the standby mode, the SMES is in a non-operational state with no power exchange. The SMES coil’s voltage is related to DC link voltage as given in the following equation [14]
| (11) |
where D represents the duty cycle of the chopper. If , it is a charging mode; if , then it’s a discharging mode; if the value of , it is a standby mode for the coil. The variation in affects the performance of the SMES; hence the error difference needs to be regulated. The DC side dynamics across the capacitor are expressed below:
| (12) |
Here C is the capacitance value; is the voltage across the DC capacitor, and is the power generated by this capacitor.
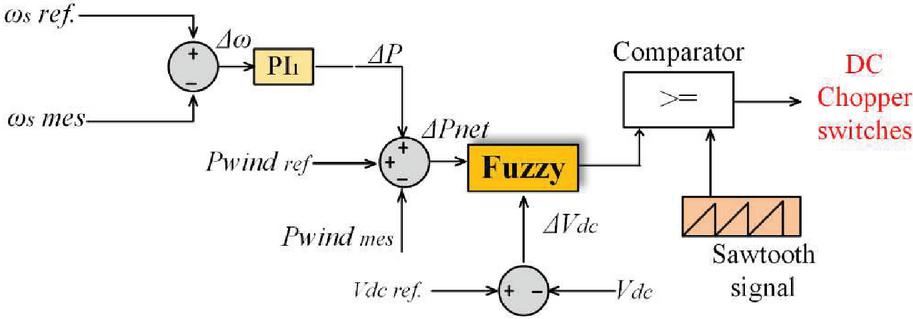
Figure 6 Control circuit of the chopper.
5.2 Proposed Control Structure of the Chopper
The chopper manages the energy flow between the coupled controller and the AC system. Figure 6 represents the Fuzzy Logic (FLC) based control circuit of the chopper [32, 33]. The inputs and are reference speed and measured speed of SG, respectively which are injected into the proportional integral controller PI-1. The error signal () of speed generates the signal power P. The error signals from the measured () and reference () real power outputs of DFIG, along with produce net power . The error signal is generated by the difference between (reference voltage) and V (actual voltage) across the DC link capacitor. These two input signals () and () are given to FLC, and an output signal D (duty cycle) is generated. This signal D is compared with a reference sawtooth signal of 1 kHz for generating switching pulses.
FLC is a linguistic-based control technique that Lotfi Zadeh invented. This control technique can explore various logical possibilities like humans, rather than just yes or no. This control technique is straightforward, responds quickly, and has smooth operation. Conventional controllers have limitations depending on the non-linearity and uncertainty of the system [32]. They are also affected by the number of inputs and outputs, environmental constraints, and uncertainty in the measurements.
But on the other hand, FLC-based controllers are more robust. Its implementation is more accessible as it can translate vague instructions of expert humans into informative signals. FLC-based applications are easier to customize and cheaper due to their simple design. FLC technique has shown significant development in artificial intelligence applications and expert systems.
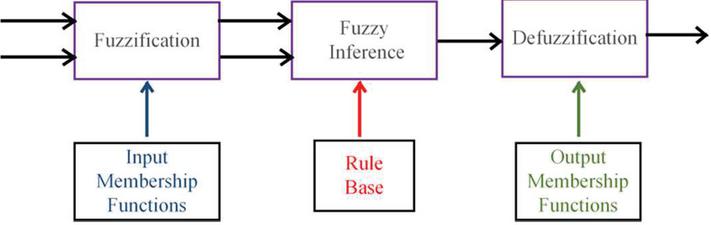
Figure 7 Architecture of fuzzy system.
The block diagram in Figure 7 shows the architecture of the fuzzy system. The main parts of this system are fuzzification, fuzzy rule base, fuzzy inference system, and defuzzification. The Membership Functions (MF) allow the presentation of linguistic terms in graphical fuzzy sets. The MFs for input variables are LN (Large Negative), Neg. (negative), Zero, Pos. (Positive), and LP (Large Positive). For output, variable membership function values are QD (Quick discharging), Dis. (discharge), NA (no charging), Chg. (Charge) and QC (Quick charging), as shown in Figure 8. After creating the rule base using IF-Then rules and considering the input and output MFs, the FLC toolbox is designed in the MATLAB Simulink. According to the rule base decision, this toolbox decides which rule should be implemented to control the output variable, i.e., duty cycle D, as presented in Figure 6. Mamdani-based fuzzy inference mechanism has been used for FLC, which uses the center-of-area technique to get the firm values of the duty cycle. This defuzzification method is relatively simple and preferred for controlling the chopper’s duty cycle [11].
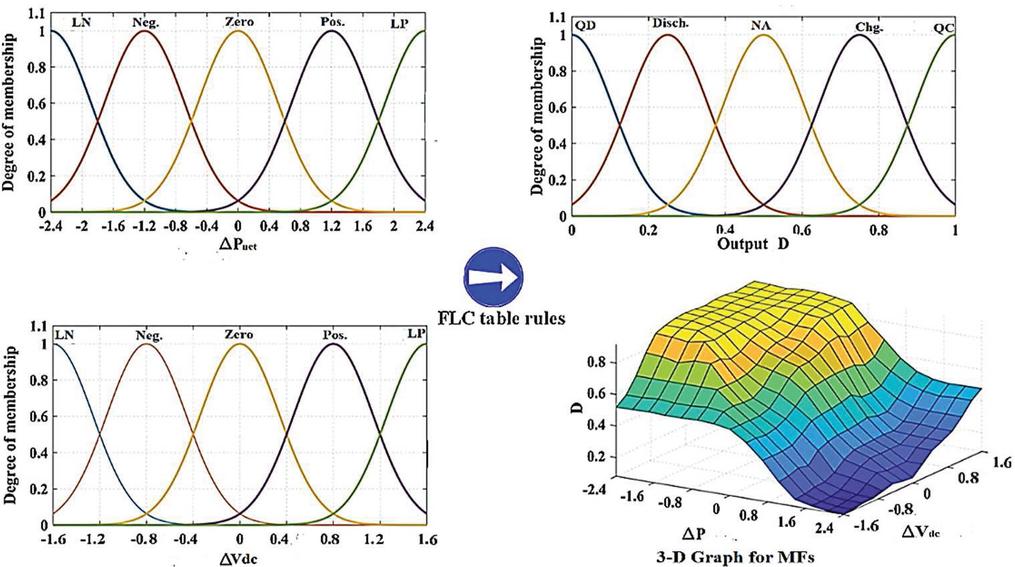
Figure 8 Input and output MFs with 3-D plot.
6 Simulation Results and Discussion
The system under study is examined for transient stability enhancement, which characterizes its capacity to restore equilibrium following a fault. The symmetrical or three-phase to-ground fault (3LG) is the most dangerous. In unsymmetrical faults, the most common fault is the line-to-ground (LG) fault which is considered for investigation [27]. The LG fault (3s to 3.1 s) and 3LG fault (5s to 5.1s) are assumed to occur in the mid of the transmission line, as shown in Figure 1. The total simulation time is taken as 8 s. The system has been investigated for three cases, i.e., without any controller, with STATCOM, and with the proposed coupled STAT-SMES controller. The outcomes for these cases are compared for better understanding.
The 3LG fault results in an extreme rise in the current value with a corresponding significant drop in the voltage. This large dip in the terminal voltage across SG results in a decline in its electromagnetic torque. Because of this abrupt disproportionality between electric and magnetic torques, the rotor angle stability of the SG gets disturbed, as displayed in Figure 9(a). The comparative results show that when fuzzy-controlled SMES is coupled with STATCOM, the rotor angle oscillations are damped within a half second for 3LG fault and 0.15 s for LG fault. For STATCOM, this time is 1.2 s and 0.5 s for 3LG and LG fault, respectively.
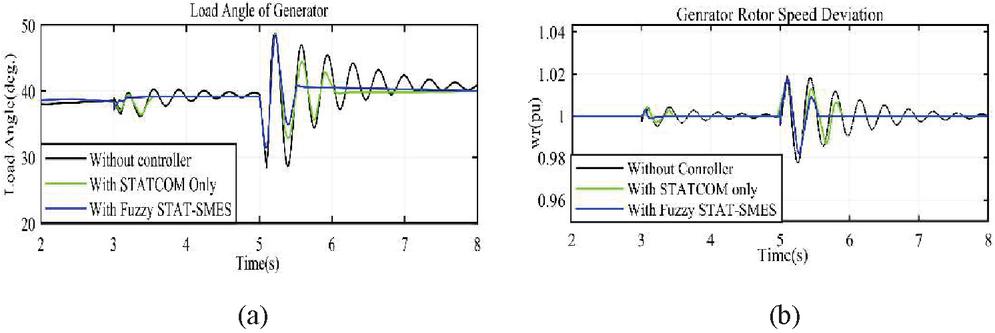
Figure 9 (a) SG load angle (b) SG rotor speed deviation.
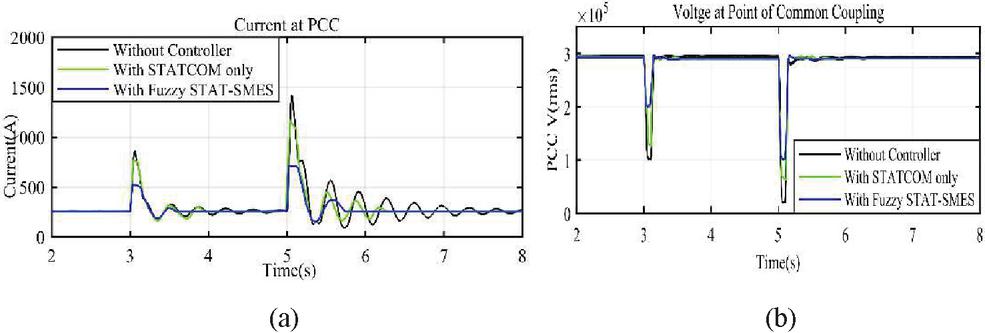
Figure 10 (a) Current at PCC (b) Volage at PCC.
The sharp and sudden change in voltage and current values during faults makes the SG unable to generate electrical power promptly. This results in strain on SG’s mechanical rotating parts, forcing the rotor speed to increase suddenly. Its influence on the rotor speed deviation can be seen in Figure 9(b). The fall in speed oscillations is much faster with Fuzzy controlled coupled controller than STATCOM for both LG and 3LG faults. The voltage in the system drops dramatically due to this transient situation. The proposed coupled controller can quickly moderate current fluctuations and voltage variations at PCC in both fault conditions, as demonstrated in Figures 10(a) and 10(b). STATCOM can pinch the voltage value to 120 kV for the LG fault and 60 kV for the 3LG fault from its dip value. But the Fuzzy-based STAT-SMES controller can bring this voltage to 200 kV for the LG and 100 kV for the 3LG fault.
These faults cause an intense rise in values of DFIG current at 3 s and 5 s, which can harm the wind farm system if not controlled instantly. The proposed fuzzy STAT-SMES controller is better at curbing down these high current values along with quick stabilization, as clear from Figure 11(a). The sharp voltage dips at DFIG terminals are recovered by 25% and 50% for LG and 3LG faults, respectively, by Fuzzy controlled STAT-SMES, as displayed in Figure 11(b).
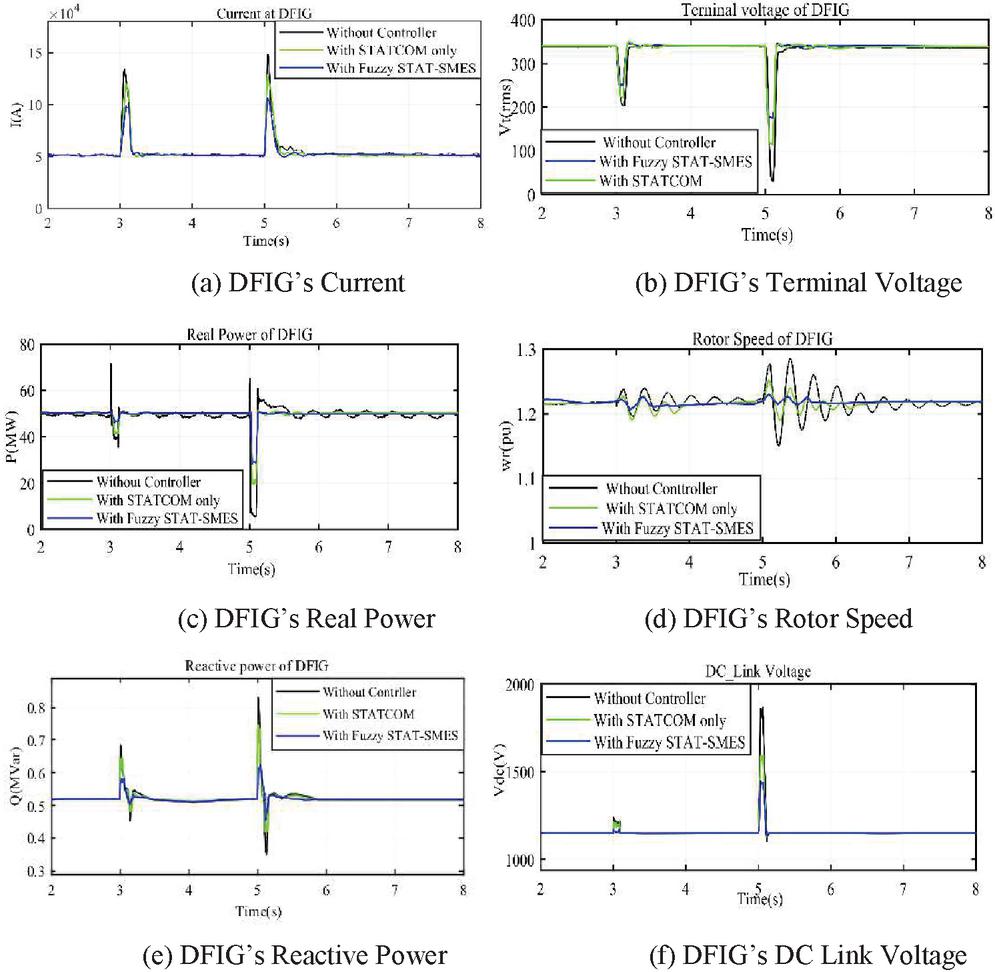
Figure 11 (a)–(f) impact on different variables of DFIG.
This acute drop in voltage of DFIG at fault results in the steep reduction and fluctuations in its real power. Without any compensation, this power decreases to a low value and becomes quite fluctuating, as evident from Figure 11(c). The combination of STATCOM and fuzzy-controlled SMES can provide real power compensation at the instant of faults, thus balancing the real power and a quick reduction in oscillations.
The fall in DFIG’s real power prevents the mechanical power from being instantly converted to electrical power, causing mechanical pressures on the revolving parts. As a result, the rotor speed increases and becomes highly fluctuating in nature without any control, as depicted in Figure 11(d). The suggested STAT-SMES controller is superior to STATCOM in regulating the rotor speed fluctuations of the DFIG following both faults. The demand for reactive power increases at the incidents of faults, as seen in Figure 11(e). The combined STAT-SMES controller with its fuzzy control scheme can compensate reactive power by 12% and 24% at 3 s and 5 s, respectively. But STATCOM can counteract it by 4.4% and 12% at the same time instants. Hence, it indicates that adding energy storage to STATCOM improves the overall performance of the combination. These transmission line faults result in power inequality across the DC link capacitor of the DFIG system. This will lead to an immediate fall in the voltage at PCC. This drop in voltage makes the DFIG incapable of transferring real power to the grid.
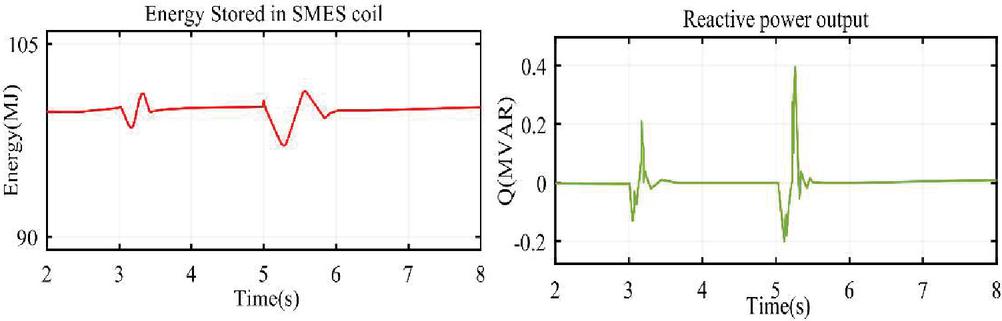
Figure 12 (a) SMES energy (b) Reactive power of STATCOM.
This instigates a rise in the DC link voltage, as seen in Figure 11(f). The comparative results show that the peak value of the DC link voltage has been lowered to an acceptable value of 1470 V by the Fuzzy STAT-SMES controller, and with STATCOM, it is at 1580 V. During faults, the STAT-SMES controller supplies reactive and real power to the system. It provides energy to the network when it’s deficient, thus balancing the system. Real power injection by SMES can reduce system oscillations following faults. The voltage imbalance at PCC has also improved; therefore, the overall performance of the entire system is improved. The results in Figures 12(a) and 12(b) indicate the energy exchange and reactive power compensation provided by SMES and STATCOM, respectively.
Based on the magnitude of the fault current, the energy has been released by the Fuzzy controlled SMES. For the LG fault, the energy exchange is within 1 MJ, but for the 3LG fault, this exchange is nearly 3 MJ. The STATCOM injected 0.2 MVAr and 0.4 MVAr for LG and 3LG faults, respectively. Comparing the grid-connected 9 MW DFIG farm system in work [14] with the presented work verifies that the proposed control scheme efficiently achieves improved stability under transient conditions. The oscillations are damped at a fast rate which validates the efficacy of this controller. Although this proposed control scheme can meet the system’s requirements, it also has some limitations and complexities. SMES needs low critical temperature for maintaining superconductivity. For this, a refrigeration system is mandatory; thus, additional energy is required for cooling the coil, which increases the expenses. The high cost of the system for large-scale applications is a limiting factor. The switching control scheme for the 3-level chopper is more complex to design due to the increased number of switching devices.
7 Conclusion and Future Scope
The paper has highlighted that adding SMES energy storage to STATCOM enhances its competence and controllability. The fuzzy based three-level chopper has boosted the capability of SMES, which makes the proposed control system better in performance. The coupled STAT-SMES control system can compensate for the real and reactive powers and voltage stability within limits for SG and DFIG. The results validate that the combination of STATCOM and fuzzy-based SMES is better than STATCOM alone in damping fluctuations and improving system stability. The high-cost limitation of SMES can be reduced as intense research is happening in SMES technology. For future work, robust control schemes based on deep learning techniques can be considered for microgrids.
References
[1] Rai A., Shrivastava A., and Jana A. C. 2021. A Solution for Power Crisis and Environment Pollution from Electricity Generation – A Study of Sub-tropical Regions. Smart Science. 9:1:40–50.
[2] S. Sen and S. Ganguli. 2017. Opportunities, Barriers, and Issues with Renewable Energy Development – A Discussion. Renewable and Sustainable Energy Reviews. 69:1170-81.
[3] Kumar A., Mishra V. M. and Ranjan R. 2021. LVRT Enhancement in Grid Connected DFIG Based Wind Turbine using PSO Optimized DVR. Distributed Generation & Alternative Energy Journal. 35:4:294–264.
[4] Ngamroo I. 2017. Review of DFIG Wind Turbine Impact on Power System Dynamic Performances. IEEJ Transactions Electrical and Electronics Engineering. 12:3:301–311.
[5] Tang Y., He H., Wen J., and Liu J. 2015. Power System Stability Control for a Wind Farm Based on Adaptive Dynamic Programming. IEEE Transactions on Smart Grid. 6:1:166–177.
[6] Castillo A. and Gayme D. F. 2014. Grid-Scale Energy Storage Applications in Renewable Energy Integration: A Survey. Energy Conversion and Management. 87: 885–89487.
[7] Nadeem F., Hussain S. M. S., Tiwari P. K., Goswami A. K., and Ustun T. S. 2019. Comparative Review of Energy Storage Systems, Their Roles, and Impacts on Future Power Systems. IEEE Access. 7:4555–4585.
[8] Ali M. H., Wu B., and Dougal R. A. 2010. An Overview of SMES Applications in Power and Energy Systems. IEEE Transactions on Sustainable Energy.1:1:38–47.
[9] Hekmati A. and Hekmati R. 2016. Double Pancake Superconducting Coil Design for Maximum Magnetic Energy Storage in Small Scale SMES Systems. Cryogenics. 80: 74–80.
[10] Mukherjee P. and Rao V.V. 2019. Design and Development of High-Temperature Superconducting Magnetic Energy Storage for Power Applications – A Review. Physica C: Superconductivity and its Applications. 563:67–53.
[11] Mukherjee P. and Rao V. V. 2019. Superconducting Magnetic Energy Storage for Stabilizing Grid Integrated with Wind Power Generation Systems. Journal of Modern Power System and Clean Energy. 7:2: 400–411.
[12] Zhai Y., Zhang Z., Tan Z., Lui X., Shen B., Coombs T., Lui P., and Huang S. 2021. Research on the Application of Superconducting Magnetic Energy Storage in the Wind Power Generation System for Smoothing Wind Power Fluctuations. IEEE Transactions on Applied Superconductivity.31:5.
[13] Yunus A. M. S., Abu-Saida A., Masoum M. A. S., El-Naggar M. F., and Jin J. X. 2020. Enhancement of DFIG LVRT Capability During Extreme Short-Wind Gust Events Using SMES Technology. IEEE Access. 8:47264–47271.
[14] Yunus A. M. S., Abu-Saida A., Mosaad M. I., Albalawi H., Aljohani M., and Jin J. X. 2021. Application of SMES Technology in Improving the Performance of a DFIG-WECS Connected to a Weak Grid. IEEE Access. 9:124541–12454.
[15] Elshiekh M., Elwakeel A., Venuturumilli S., Alafnan H., Pei X., Zhang M., and Yuan W. 2021. Utilizing SMES-FCL to Improve the Transient Behaviour of a Doubly Fed Induction Generator DC Wind System. International Journal of Electrical Power and Energy System. 131.
[16] Mosaad M. I., Abu-Saida A., and El-Naggar M. F. 2019. Application of Superconductors to Improve the Performance of DFIG-based WECS. IEEE Access. 7:103760–103769.
[17] Jiang H. and Zhang C. 2019. A Method of Boosting Transient Stability of Wind Farm Connected Power System Using S Magnetic Energy Storage Unit. IEEE Transactions on Applied. Superconductivity, 29:2.
[18] Gounder Y. K., Nanjundappan D., and Boominathan V. 2016. Enhancement of Transient Stability of Distribution System with SCIG and DFIG Based Wind Farms Using STATCOM. IET Renewable Power Generation. 10:8:1171–1180.
[19] Movahedi A., Niasar A. H., and Gharehpetian G. B. 2019. Designing SSSC, TCSC, and STATCOM Controllers Using AVURPSO, GSA, and GA for Transient Stability Improvement of a Multi-Machine Power System with PV and Wind Farms. Electrical Power and Energy Systems. 106:455–466.
[20] Qi J., Zhao W., and Bian X. 2020. Comparative Study of SVC and STATCOM Reactive Power Compensation for Prosumer Microgrids with DFIG-Based Wind Farm Integration. IEEE Access. 8:209878–209885.
[21] Molina M. G. 2017. Energy Storage and Power Electronics Technologies: A Strong Combination to Empower the Transformation to the Smart Grid. Proceedings of IEEE. 105:11:2191–2219.
[22] Sedaghati R., Hakimzadeh M., Davodi A., and Javidtash N. 2014. Dynamic Modelling and Simulation of a STATCOM/SMES Compensator in Power Systems. International Journal of Computer and Systems. 8:5:806–809.
[23] Molina M. G. and Mercado P. E. 2013. Primary Frequency Control of Multi-Machine Power Systems with STATCOM-SMES: A Case Study. International Journal of Electrical Power Energy System. 44:1:388–402.
[24] Ananthavel S., Padmanaban S., Shanmugham S., Blaabjerg F., Ertas A. H., and Fedak V. 2016. Analysis of Enhancement in Available Power Transfer Capacity by STATCOM Integrated SMES by Numerical Simulation Studies. International Journal of Engineering Science Technology. 19:2:671–675.
[25] Dahiya A., Dahiya R. and Kothari D. P. 2011. A Comparison of ANN and Fuzzy Controlled STATCOM-SMES for Improving Transient Stability and Frequency Stabilization of SMIB. MIT International Journal of Electrical and Instrumentation Engineering.1:2:54–62.
[26] Barra P. H. A., De Carvalho W. C., Menezes T. S., Fernandes R. A. S. and Coury D. V. 2021. A Review on Wind Power Smoothing Using High-Power Energy Storage Systems. Renewable and Sustainable Energy Reviews.137.
[27] Kundur P., Balu N. J. and Lauby M. G. 1994. Power System Stability and Control. New York, McGraw-Hill.
[28] Munisamy V., Vadivoo N. S. and Devasena V. 2021. Stochastic Distribution Controller for wind turbines with Doubly Fed Induction Generator. Distributed Generation & Alternative Energy Journal. 35:4:307–330.
[29] Hingorani N. G. and Gyugyi L. 2000. Understanding FACTS, IEEE Power Engineering Society. Wiley.
[30] Acha E., Fuerte-Esquivel C. R., Ambriz-Perez H. and Angles-Camacho C. 2004. FACTS Modelling and Simulation in Power Networks. Wiley.
[31] Gil-González W. and Montoya O. D. 2018. Passivity-Based PI Control of a SMES System to Support Power in Electrical Grids: A Bilinear Approach. Journal of Energy Storage. 18:459–466.
[32] De Silva C. W. 2018. Fundamentals of Fuzzy Logic in Intelligent Control. Boca Raton: CRC Press. p. 43–68.
[33] Abdalla A. N., Nazir M. S., Tao H., Cao S. and Ji R. 2021. Integration of Energy Storage System and Renewable Energy Sources Based on Artificial Intelligence: An Overview. Journal of Energy Storage. 40.
Biographies

Sonia Dhiman, Research Scholar, Department of Electrical Engineering, National Institute of Technology Kurukshetra (Haryana)-136119, India. Area of interest: Renewable Energy, FACTS devices, Energy Storage.

Anil Kumar Dahiya, Associate Professor, Department of Electrical Engineering, National Institute of Technology Kurukshetra (Haryana)-136119, India. Area of interest: Transient Stability, FACTS controller and Renewable Energy, worked with various industrial and technical education institutes. Tackling environmental and waste management issues.
Distributed Generation & Alternative Energy Journal, Vol. 38_4, 1177–1196.
doi: 10.13052/dgaej2156-3306.3845
© 2023 River Publishers