Frequency Control in an Autonomous Microgrid Using GA Based Optimization Technique
H. R. Sridevi*, Shefali Jagwani, Shreeram V. Kulkarni and H. M. Ravikumar
Nitte Meenakshi Institute of technology, Bengaluru, Karnataka, India
E-mail: sridevi.hr@nmit.ac.in; shefali.jagwani@nmit.ac.in; shreeram.kulkarni@nmit.ac.in; hmrgama@gmail.com
*Corresponding Author
Received 30 November 2021; Accepted 09 May 2022; Publication 03 January 2023
Abstract
In recent times the rapid development of distributed energy sources has transformed the conventional electrical grid to a decentralised system. This has led to the advancement in research of microgrid. In the conventional grid, the voltage and frequency regulation depends on the speed control of alternators connected to the grid. But for an autonomous microgrid, the voltage and frequency has to be regulated independent of the main grid. Deviation in the frequency occurs whenever there is change in the load and due to inherent variability of distributed energy sources. This deviation can be regulated by optimising the droop coefficients using Genetic algorithm (GA). Simulations have been carried out in MATLAB/SIMULINK for different types of loads (linear and non-linear) and results are shown for frequency deviation, and active power sharing of the DGs. The responses for frequency deviations with and without GA optimizations are presented.
Keywords: Distributed energy sources, autonomous microgrid, genetic algorithm, frequency control, active power sharing.
1 Introduction
The concept of microgrid is an emerging alternative with the advancement in Distributed energy sources and power electronic devices. Microgrids can be described as a collection of loads, Distributed Generation (DG) sources and energy storage devices operating in harmony to provide reliable supply. Most of the DG sources are connected to the distribution side via Pulse Width Modulation (PWM) based Voltage Source Inverter (VSI). The modes in which the microgrid can operate are (i) grid-connected mode (ii) islanding mode. In grid connected mode, the microgrid is connected to a host power system at one connection point called “Point of Common Coupling” (PCC). It enables to maintain the microgrid at a constant frequency and permits exchange of power between the microgrid and host power system. The microgrid control in the grid connected mode provides the active and reactive power produced by the DGs in order to meet the load requirement. whereas in an Islanded microgrid, where local generation of power takes place, independent control of voltage and frequency is required which is quite challenging as power balance requires implementation of accurate load sharing mechanisms [1].
Various control strategies are available to balance the power either by local controllers or central controllers. The microgrid controllers are mainly responsible for (i) voltage and frequency regulation under any operating condition. (ii) To ensure appropriate power sharing in both the modes (iii) a smooth switch over between the two modes. In the centralised approach, control systems located at the DG units follow commands from the microgrid’s central controller which requires extensive communication. The centralised approach has technical and economic constraints mainly for isolated microgrids. Some of the centralised control strategies include concentrated control, master/slave control and distributed control. In a decentralised approach the DG units are controlled by the local information. The decentralised techniques are based on the droop concept [2–4]. In this method, the DGs make use of droop controllers. These help in deciding the frequency and voltage of the microgrid depending on the local power measurements. It is a desired technique to control many inverters connected in parallel [5]. This control scheme has originated from the concept of power balance in alternators as seen in a traditional power system. The alternators adjust sudden increment in the load by reducing the frequency based on the droop characteristics. In addition, the reactive power is shared between the DGs according to the droop characteristic in the voltage. In an islanded mode, the droop control is located at the inverters. Whenever there is a load variation, the output voltage and frequency of VSI based DG units will change according to the droop characteristics [6–8]. For maintaining the frequency within the permissible range, the droop coefficients should be precisely determined. Optimization techniques based on natural selection like the Swarm intelligence techniques which provide quick and effective solutions can be used to determine the same. Swarm Intelligence is a type of Artificial intelligence technique which prototypes the combined behaviour of the swarms found in nature [9, 10]. Some of the swarm intelligence algorithms are Genetic Algorithms (GA), Ant Colony Optimization (ACO), Particle Swarm Optimization (PSO) [11–13], Differential Evolution (DE), Artificial Bee Colony (ABC), Grey Wolf, Grasshopper, Cuckoo Search Algorithm (CSA) etc.
GA is an optimization and searching process that imitates the concept of natural evolution, selection and genetics. It provides optimal and near optimal solutions out of which the best solution can be selected. In this paper the active droop coefficients are obtained for the regulation of frequency using GA.
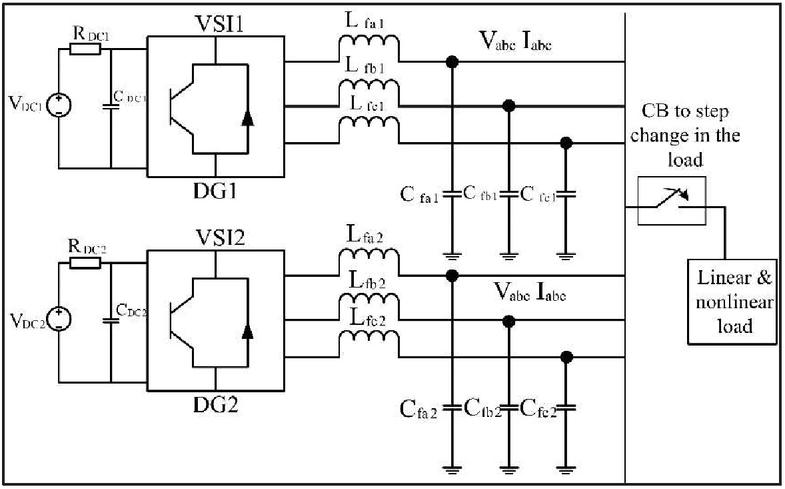
Figure 1 Block diagram of two inverter interfaced DG sources connected in parallel in the islanded mode.
2 Proposed Control Strategy
In this section the control strategy is implemented for an autonomous microgrid consisting of two inverter interfaced DG sources connected in parallel. The block diagram is presented in Figure 1. It comprises of two three phase inverters, power controller, voltage controller and current controller. Generation of switching signals for the inverters is obtained by using SPWM technique. The power controller decides the active and reactive power based on the droop characteristics. The optimised values of droop coefficients are obtained using Genetic algorithm. The implementation of current and voltage controllers are done through conventional PI controllers. Voltage controller provides the reference current for the filter inductor. The current controller generates the command voltage for PWM signal generation.
Figure 2 shows the proposed control strategy for the autonomous microgrid. The Instantaneous active and reactive powers are given in Equations (1) and (2) as:
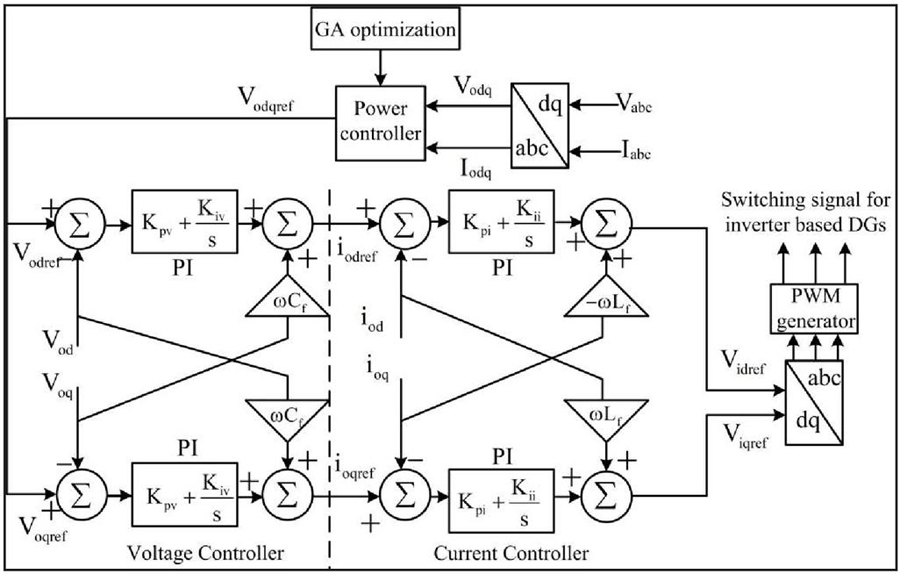
Figure 2 The proposed control strategy for the autonomous microgrid.
2.1 Power Controller
| (1) | ||
| (2) |
Inverter voltage in d axis frame Inverter current in d axis frame.
Active and reactive powers corresponding to fundamental component are obtained using Equations (3) and (4) as follows [14, 15]:
| (3) | ||
| (4) |
Cut-off frequency of low pass filter used in the power controller block.
The frequency is set according to droop gain m given by Equation (5)
| (5) |
where Nominal frequency, mp f/P. f is the change in frequency and P is the change in active power. Similarly in order to share reactive power among DGs, an optimised droop controller can be implemented which is not in the scope of this paper.
2.2 Voltage Controller and Current Controller
The Voltage and current Controllers are implemented in the outer loop and uses the standard PI controller. The equations for the voltage controller are given as:
In the above equations are the inverter output dq-axis currents and voltages respectively. is the nominal system frequency in radians, and are the voltage controller proportional and integral constant of the PI controller.
The equations for the current controller are given as:
| (8) | |
| (9) |
Where, and are the current controller proportional and integral constant of the PI controller.
3 Optimization Algorithm
Optimization is the process of searching the best optimal solutions among all the possible solutions by maximizing or minimizing the objective functions. Genetic Algorithm is one such technique which gives best possible optimum values. Genetic Algorithm is an optimization and searching process that mimics the concept of natural evolution, selection and genetics. The theory of evolution by natural selection is carried out in these processes – Overproduction, variation, selection and adaptation. After all these steps, Darwin concept of “Survival of the fittest” and “Select the best, discard the rest” methods came into picture. In this manner, evolution keeps on taking place until we find our optimized solution [16]. The Figure 3 below depicts the basic structure of GA.
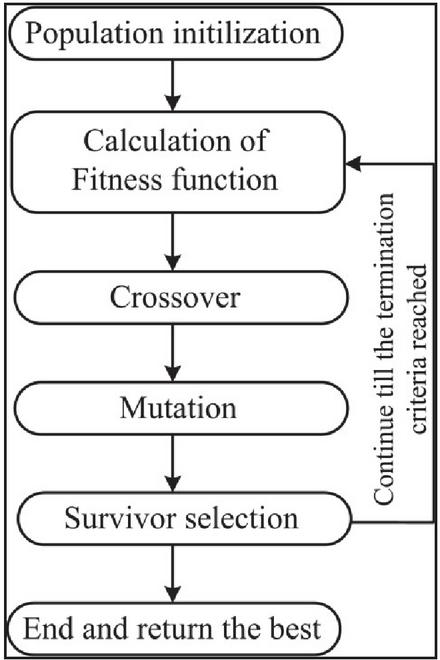
Figure 3 Basic Structure for GA optimization algorithm.
In the first step population is initialized, then fittest individuals (parents) are selected. Crossover and mutation on the parents are applied to produce new off-springs generation. The ones those survive among the best, moves further to termination point and then optimization result is obtained. When best survivor off-springs are not selected, the loop process again and control moves towards the fitness function calculation step. The termination and best return values are processed through many iterations and best values are returned. The parameters considered for GA optimization are listed as: 40 as the population size, crossover percentage is 70%, maximum iterations are considered as 30 and we have considered the cumulative probability with Roulette wheel method for parent selection. From the literature, it is seen that GA optimization technique gives good performance for load variations.
For optimising the active power droop coefficients, it is necessary to minimise the objective function (OF) that is the frequency deviation so that it is within the nominal range when there is change in the load. The OF is given in Equation (10).
| (10) |
The change of load between the DGs should satisfy Equation (11)
| (11) |
Where f is the frequency deviation of microgrid during load change in islanded mode, m is the active droop coefficient of DG1 and m is the active droop coefficient of DG2 [17–20].
Therefore, the relation between frequency deviation and active droop coefficients is given by Equation (12) as follows:
| (12) |
Selection of optimised droop coefficients using GA reduces the deviation of microgrid frequency whenever there is change in the load.
4 Simulation Results
The system parameters which are used for the simulation model are listed in Table 1.
Table 1 System parameters
| Controller | Parameter | Value |
| DG1 & DG2 | DC link voltage | 800 V |
| DG1ratings | 10 kVA | |
| DG2 ratings | 10 kVA | |
| Inverter Filter Capacitance | 500 H | |
| Voltage controller | K | 0.05 |
| K | 390 | |
| Current controller | K | 10.5 |
| K | 16000 |
The MATLAB/SIMULINK model is shown in Figure 4. It consists of two DGs connected in parallel to the load. Simulation results are obtained for various types of loads (linear and non-linear). The load is changed at 0.3 secs. The active power and frequency of the DGs for different loads are shown.
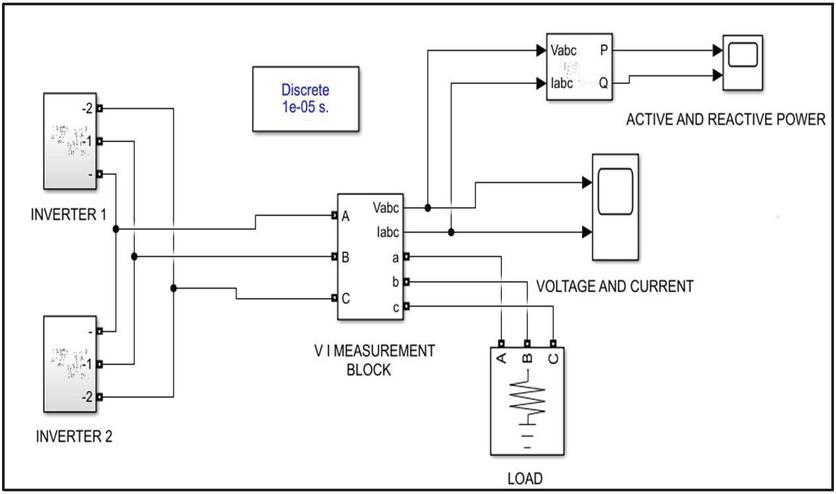
Figure 4 Simulation model of the system.
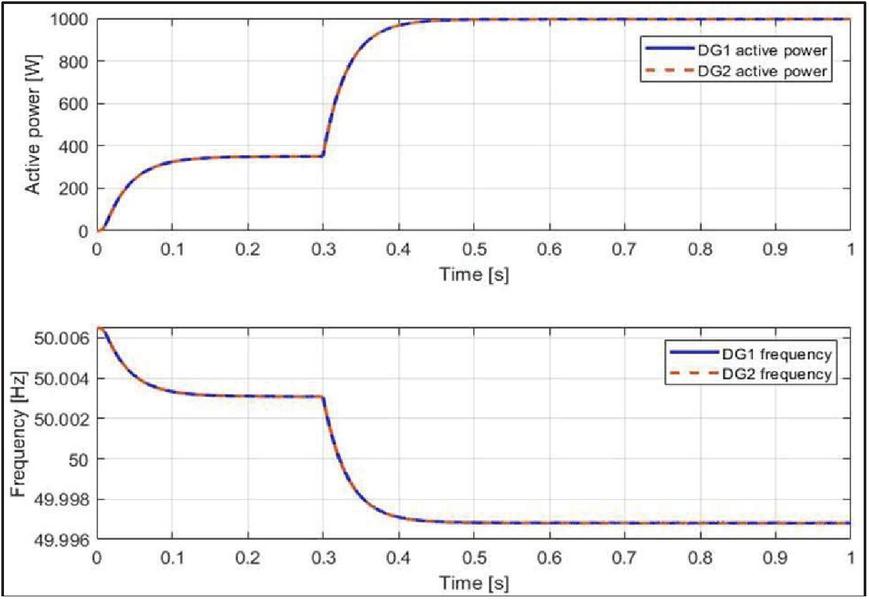
Figure 5 Active power and frequency for R load.
Active power and frequency of DG1 and DG2 for resistive load (R load) are shown in the Figure 5. Load is increased at 0.3 s. The active power is 750 W up to 0.3 s and at 0.3 s the value changes to 2000 W. It is observed that the frequency deviation is well within the nominal range before and after the load change.
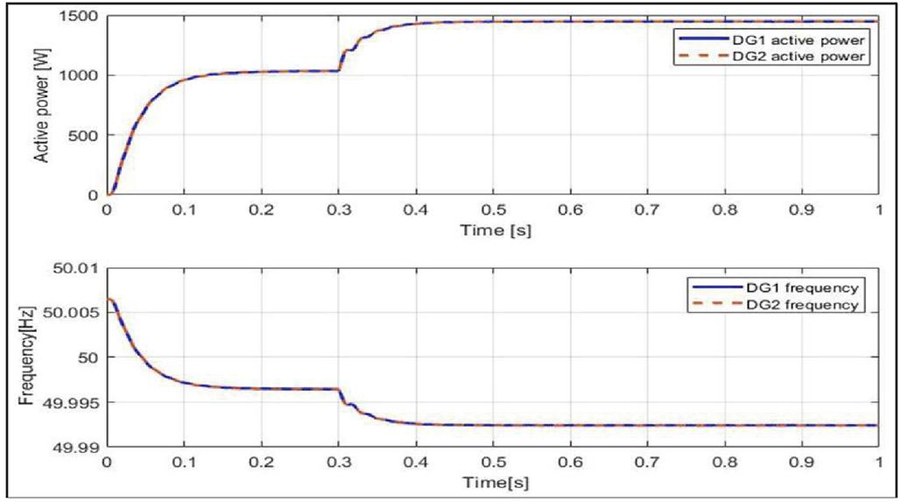
Figure 6 Active power and frequency for RL load.
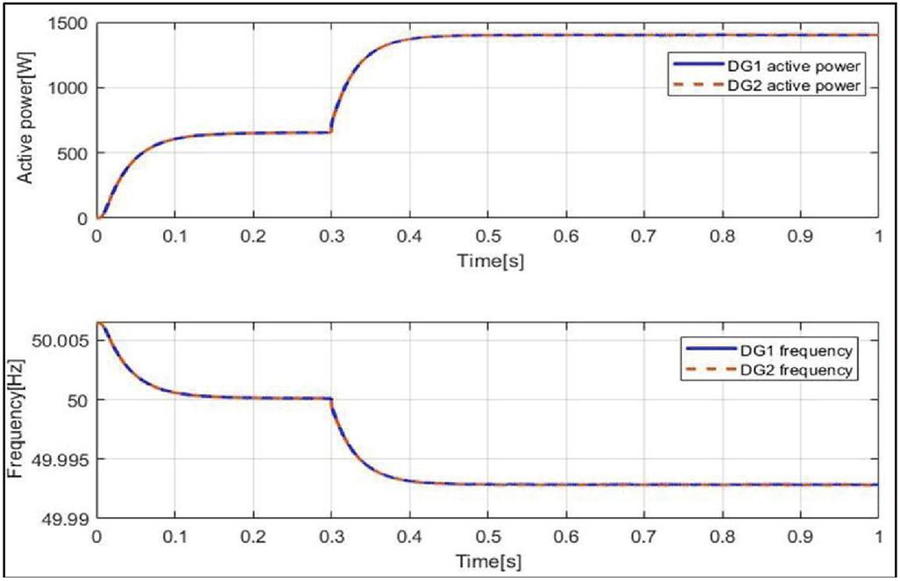
Figure 7 Active power and frequency for RC load.
DG1 active power and DG2 active power for resistive-inductive (RL load) is shown in the Figure 6. The value of active power upto 0.3 s is 2200 W and after the rise in load the DGs supply a power of around 2900 W. It is obvious from the figure that the frequency deviation is not very significant and does not cross the boundaries even after change in the load.
For resistive – capacitive (RC load), the DG1 and DG2 active power and frequency is presented in the Figure 7. The active power is found to be 1200 W upto 0.3 s and later changes to 2800 W at the point of load change. Variation in frequency for change in the load is within the permissible limits.
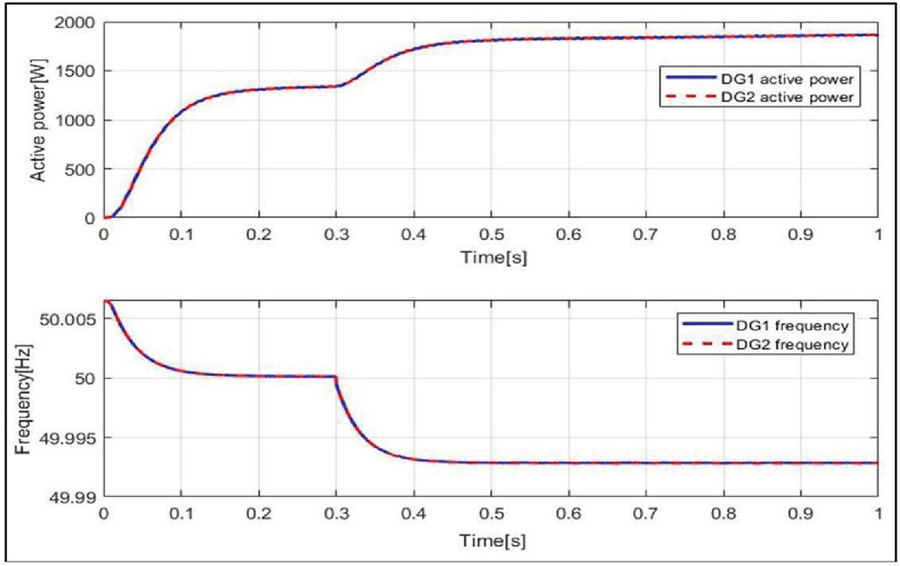
Figure 8 Active power and frequency for Rectifier load.
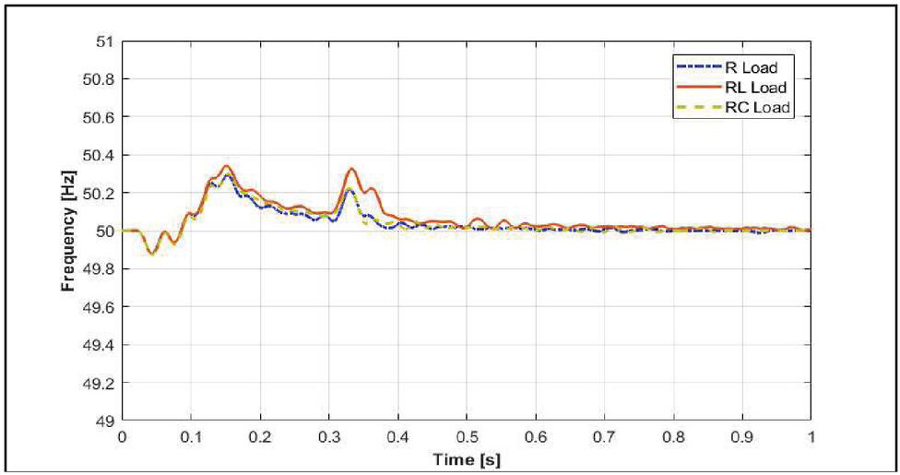
Figure 9 Overall system frequency variation for various loads.
Simulation results are shown in Figure 8 for a non-linear load (rectifier). The Active power is 2640 W before the load changes and after the increase in load active power is around 3700 W. It is observed that the frequency deviation is well within the nominal range when the load changes.
The overall system frequency for R, RL and RC loads are shown in the Figure 9. It is found that with the GA implementation the frequency deviation is negligible.
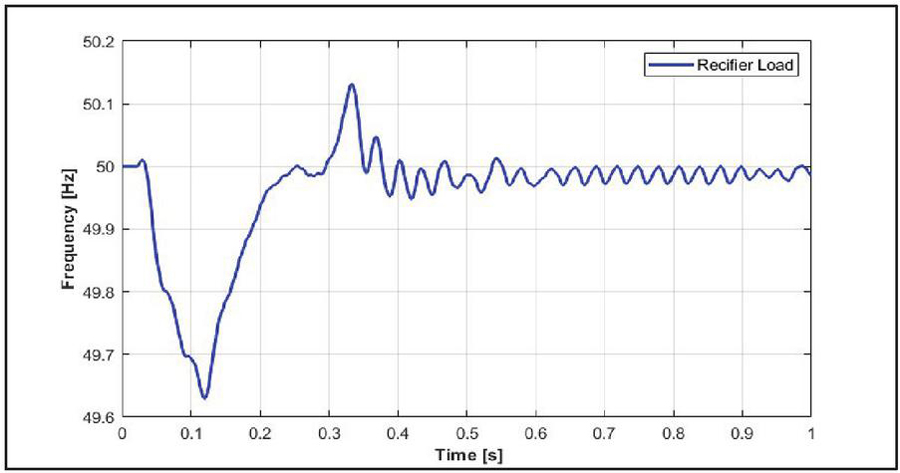
Figure 10 Frequency variation for Rectifier load.
From the Figure 10, it is obvious that the frequency settles to 50 Hz after a sudden load change at 0.3 s for rectifier load. It is inferred that the system behaves well even for non-linear loads.
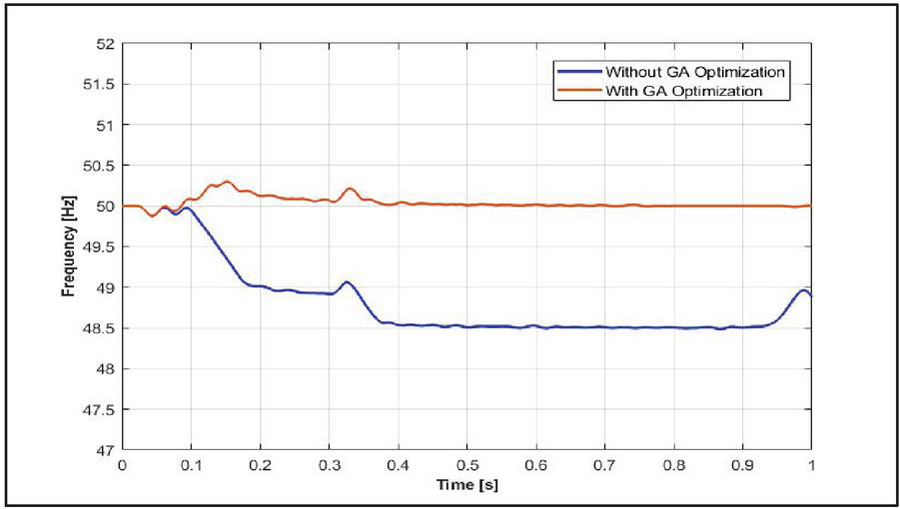
Figure 11 Frequency deviation of the system with and without GA optimization.
From the simulation results shown in Figure 11, it is clear that frequency deviates beyond the allowable range when optimised values for the droop coefficients are not used.
5 Conclusion
Frequency is an important characteristic that effects the power supply reliability and power quality of microgrid. An Optimization method for a droop controlled islanded microgrid based on the Genetic algorithm has been implemented. The droop coefficients are optimised such that the frequency deviation is in the allowable range for any sudden change in the load. Simulation results are presented that support validity of this optimization. It is observed that the frequency deviation is well within the nominal value for various linear and non-linear loads under test. Thus the control strategy presented in this work enables the use of autonomous microgrid for continuous and reliable power supply in remote areas.
Acknowledgement
The authors thank Muthamma N S and the Department of Electrical & Electronics engineering of NMIT, Bangalore for the support. The authors also thank Visvesvaraya Technological University, Belagavi.
References
[1] R. H. Lasseter and P. Paigi, ‘Microgrid: a conceptual solution’, Proc. IEEE 35th Annual Power Electronics Specialists Conference, pp. 4285–4290, 2004.
[2] D. E. Olivares et al., ‘Trends in Microgrid Control’, IEEE Transactions on Smart Grid. 2014; 5(4):1905–1919.
[3] Gartner Report, Financial Times, 2007.
[4] Hua Han, Xiaochao Hou, Jian Yang, Jifa Wu, Mei Su and Joseph M. Guerrero. Review of Power sharing control strategies for islanding operation of AC Microgrids. IEEE transactions on Smart Grid. 2016; 7(1):200–215.
[5] J. A. Peças Lopes, C. L. Moreira, and A. G. Madureira. Defining Control Strategies for MicroGrids Islanded Operation. IEEE transactions on power systems. 2006; 21(2):916–924.
[6] S. Khongkhachat and S. Khomfoi. Droop control strategy of AC microgrid in islanding mode. In Proceedings of 18th International Conference on Electrical Machines and Systems 2015 (pp. 2093–2098).
[7] A. El MoubarekBouzid, P. Sicard, A. Yamane and J. Paquin. Simulation of droop control strategy for parallel inverters in autonomous AC microgrids. In Proceedings of 8th International Conference on Modelling, Identification and Control, 2016 (pp. 701–706).
[8] Hassan Bevrani and ShoreshShokoohi. An Intelligent Droop control for simultaneous Voltage and Frequency regulation in Islanded Microgrids. IEEE transactions on Smart Grid. 2013; 4(3):1505–1513.
[9] Mohammad S. Golsorkhi and Dylan D. C. Lu. A Control method for Inverter -based Islanded Microgrids based on V-I Droop characteristics. IEEE transactions on Power delivery. 2015; 30(3):1196–1204.
[10] T. A. Jumani, M. W. Mustafa, A. S. Alghamdi, M. M. Rasid, A. Alamgir and A. B. Awan. Swarm Intelligence-Based Optimization Techniques for Dynamic Response and Power Quality Enhancement of AC Microgrids: A Comprehensive Review. IEEE Access. 2020; 8:75986–76001.
[11] C. Suchetha and J. Ramprabhakar. Optimization Techniques for Operation and Control of Microgrids – Review. Journal of Green Engineering; 8(4):621–644.
[12] Waleed Al-Saedi, Stefan W. Lachowicz, DaryoushHabibi, Octavian Bass. Voltage and frequency regulation based DG unit in an autonomous microgrid operation using Particle Swarm Optimization. International Journal of Electrical Power & Energy Systems. 2013; 53:742–751.
[13] W. Al-Saedi, S. Lachowicz, D. Habibi and O. Bass. PSO algorithm for an optimal power controller in a Microgrid. In Proceedings of International Conference on Sustainable Energy Engineering 2017 (pp. 12–28).
[14] Mehrdad Ahmadi Kamarposhti, Optimal control of islanded Microgrid using Particle Swarm Optimization algorithm. International Journal of Industrial Electronics, control and optimization. 2018; 1(1):53–60.
[15] N. Pogaku, M. Prodanovic and T. C. Green. Modeling, Analysis and Testing of Autonomous operation of an inverter based Microgrid. IEEE transaction on Power Electronics. 2007; 22(2):613–625.
[16] Kulkarni Shreeram V, and Dattatraya N Gaonkar, Improved droop control strategy for parallel connected power electronic converter based distributed generation sources in an Islanded Microgrid. Electric Power Systems Research. 2021; 201:107531.
[17] Alam, T., Qamar, S., Dixit, A., &Benaida, M. Genetic Algorithm: Reviews, Implementations, and Applications. International Journal of Engineering Pedagogy. 2020; 10(6):57.
[18] A. Basati, M. B. Menhaj and A. Fakharian. GA-based optimal droop control approach to improve voltage regulation and equal power sharing for islanded DC microgrids. In Proceedings of Electric Power Quality and Supply Reliability, 2016 (pp. 145–150).
[19] M. Farrokhabadi, C. A. Cañizares and K. Bhattacharya. Frequency Control in Isolated/Islanded Microgrids through Voltage Regulation. IEEE Transactions on Smart Grid. 2017; 8(3):1185–1194.
[20] TanvirAhmmed, Irin Akhter, S. M. Rezeaul Karim, F. A. SabbirAhamed. Genetic Algorithms for PID Parameter Optimisation. American Journal of Intelligent Systems. 2020; 10(1):8–13.
[21] Razavi. F, Torani. R, Askarian. I, Asgharizadeh. A, Masoomi N. Optimal design of islanded microgrid using Genetic algorithm. In Proceedings of the International Conference on Genetic and Evolutionary methods 2012.
Biographies

H. R. Sridevi, was born in Bengaluru, India, 1983. Received B.E. degree in Electrical and Electronics Engineering (EEE) from M.S. Ramaiah Institute of technology, Bengaluru, India. Received M.Tech. degree in Power Electronics from B M S college of engineering, Bengaluru, India. She is Pursuing her Ph.D. degree in the area of Microgrids. She is presently working as a Assistant Professor in the Department of Electrical and Electronics Engineering in Nitte Meenakshi Institute of Technology (NMIT), Bengaluru, Karnataka, India. She is a Life member of Indian Society of Systems for Science and Engineering. She has authored and co-authored some papers in International Conferences. Her areas of interests include Power Systmes, Power Electronics and Microgrids.

Shefali Jagwani received B.E degree in 2009 and ME in Power Systems in 2011. She received her PhD degree in 2019 from BMS College of Engineering Bangalore. She is currently working as Head, Power Engineering Centre of Excellence and Associate Professor in Department of Electrical and Electronics Engineering at NMIT Bangalore. She is a senior member, IEEE and has 9 years of academic and research experience. She has received many awards and recognitions. She is currently an executive committee member of IEEE PELS and IES Bangalore Section and is recently nominated as treasurer for Industrial Electronic Society 2021. She has co-authored one book and many international papers. Also, she is the reviewer of many Elsevier and IEEE Journals. She is the member of BoE, BoS in NMIT and her areas of interests include Power Electronics and Drives, Switched Reluctance Machines, WindEnergy Generation, etc.

Shreeram V. Kulkarni received B.E. degree in Electrical and Electronics Engineering (EEE) from Guru Nanak Dev Engineering College (GNDEC) Bidar, Karnataka, India. Received M.Tech. degree in Electrical Power Systems (EPS) from Shri Dharmasthala Manjunatheshwara College of Engineering and Technology (SDMCET), Dhavalagiri Dharwad, Karnataka, India. He is the graduate student member of IEEE (GSIEEE). His research interests are Power System Analysis and Control, Microgrid Operation, Droop Control for parallel connected DGs, and Islanding detection for grid connected power electronic based DG systems and published research papers in journal and conferences. Completed his Ph.D. degree in Power Systems from National Institute of Technology Karnataka (NITK), Surathkal, India. Presently working as a Assistant Professor in the Department of Electrical and Electronics Engineering in Nitte Meenakshi Institute of Technology (NMIT), Bengaluru, Karnataka, India.

H. M. Ravikumar received B.E. degree in Electrical and Electronics in 1984, from Dayananda Sagar College of Engineering, Bengaluru, M.E in Power systems from NIE, Mysuru in 1990 and Ph.D from IIT Bombay in 2000. He is working as a Professor in the department of Electrical and Electronics Engineering, NMIT. He has authored and co-authored in many international papers. He has 35 years of teaching expereince. His areas of interest are in Power systems, Artificial Intelligence, Fuzzy logic.
Distributed Generation & Alternative Energy Journal, Vol. 38_2, 595–610.
doi: 10.13052/dgaej2156-3306.38210
© 2023 River Publishers