Mitigation of Uncertainty in an Islanded Microgrid Using Robust Voltage Controller
Ishika Singh1, Sheetla Prasad1,* and Vipin Chandra Pal2
1Department of Electrical, Electronics and Communication Engineering, Galgotias University, Greater Noida, India
2Department of Electrical Engineering, National Institute of Technology Silchar, India
E-mail: sheetla.prasad@galgotiasuniversity.edu.in
*Corresponding Author
Received 21 January 2022; Accepted 10 May 2022; Publication 03 January 2023
Abstract
In microgrid, a severe problem occurs in terms of voltage oscillations due to mismatch between synchronizing and damping torque. In this study, a centralized nonlinear sliding mode voltage controller proposes to minimize the rotor and DC voltage oscillations issue in an islanded microgrid. The linear matrix inequality (LMI) technique has been applied for bounding the state error. Lyapunov criteria is utilized for assurance of asymptotic convergence and LMI optimization approach is used for obtaining the controller parameters. The proposed controller is able to tackle the parametric uncertainties of diesel generator, oscillations of rotor and voltage fluctuation as well as the closed-loop system responses also improves both transient responses and steady state responses simultaneously. The simulation results authenticate that the proposed controller confirms speedy recovery of nominal frequency without any oscillations and reduced the limitation of chattering notably without any loss in control accuracy. The performance and robustness of the proposed controller is also compared with conventional controllers.
Keywords: Microgrid voltage control, nonlinear sliding mode controller, linear matrix inequality optimization, system uncertainty.
1 Introduction
Due to limited sources of fossil fuels and environmental pollution are basic cause to find an alternative solution of power generation. As results, renewable energy resources are utilized as an alternative source of power. Recent studies have been shown that renewable energy has a remarkable share of future electricity need even after consideration of several limitations [1]. The renewable energy resources are freely available in nature and can be used to generate electricity. The microgrid concept-based power generation is more economical compared to fossil fuel-based generation and also it is environment friendly. This idea brings the concept of microgrid which became an interesting technology in the several renewable plant integrations based centralized control nowadays [2].
Thus, continuous localize increased power demand can be managed using a community Microgrid [3]. In a distribution type system, if high renewable penetration is considered then it faces too many technical and operational problems just like quality of power, stability and voltage of network as well as frequency deviation. In order to solve this issue by using concept of microgrid was developed by researchers [4, 5]. In [6], several functional and technical problems such as ownership, coordinated equipment control, frequency control etc. are highlighted effectively. With the help of two methodology of microgrid named as grid connected mode, which is connected to utility grid by a static stitch, while another one named as islanding mode, which is not giving any power to microgrid [7]. Very basic parameters of distinct type microgrid described as a single controllable entity from grid and generate frequency and reference voltage in an islanded operation mode [8].
For generation of electricity by renewable energy resources like photovoltaic, tidal, wind etc. the controller is playing the key role for proper generation and distribution of energy resources and mitigating the effect of disturbances/uncertainties in parameters. Thus, in the literature, several controllers such as proportional-integral-derivation (PID) controller [9, 10] were used to minimize the effect of disturbances/uncertainties in parameters. Due to static nature, PID controller is not capable to sustain closed loop performance against disturbances/uncertainties in parameters [11]. As results, microgrid is affected from the frequency deviation or even leads to system instability. However, the frequency deviation in an isolated mode of operation of microgrid is still formidable task due to intermittent nature of distributed energy resources.
Sliding mode controller is utilized to extract maximum power from wind even in presence of wind speed uncertainties [12]. The microgrid frequency is regulated even in presence of stochastic uncertainties and disturbances using several optimization such as two dimensional Sine Logistic map based chaotic sine cosine algorithm (2D-SLCSCA) based PID controller [11], grasshopper algorithmic technique based PI controller [12], fast frequency response optimized power point tracking method [13], h-infinity optimization based PID controller [14], genetic algorithms based PI controller [15], genetic algorithm based grid-forming droop control [16] etc. Thus, islanded microgrid frequency and voltage deviations against uncertainties, outage of power or load and load disturbances in distributed generations are still required further developments.
In this study, diesel generator and DC voltage solar PV based DC to AC converter has been considered and its state-space model is developed with assumption of mechanical torque for small perturbations. The performance of automatic voltage regulator (AVR) associated with diesel generator models are not sufficient to reduce frequency and voltage deviations against load disturbances and parametric uncertainties. Hence, parametric uncertainties are taken in rotor angle feedback gain constant () [17] and solar plant DC voltage due to random and uncertain nature of sunlight. In addition, loads are random and unknown in nature and as results, it may create frequency and voltage deviation with oscillations. Due to above causes, an involuntary stress is faced by distributed generations. These uncertainties and load disturbances deteriorate microgrid overall performance in terms of frequency and voltage fluctuations or even microgrid becomes unstable. Thus, above plant uncertainties may be reduced via a centralized controller based proper coordination and switching of inverter. Thus, more precisely the work done in this paper is as follows:
• A centralized nonlinear sliding mode control (SMC) based microgrid central controller is proposed to mitigate frequency and voltage fluctuations problem in an islanded microgrid.
• The proposed control scheme is capable to regulate both plant in proper coordinated way till frequency and voltage fluctuations approaches to zero.
• Closed-loop system responses improves both transient responses as well as steady state responses simultaneously against solar DC voltage uncertainty and diesel generator parametric uncertainties.
• The proposed controller confirms speedy damp out of rotor oscillation, microgrid frequency and voltage fluctuations, and reduces the limitation of chattering notably without any loss in control accuracy.
This paper is organized as follows: dynamic modeling of diesel generator and a DC voltage solar PV based DC to AC inverter model are reviewed in Section 2 followed by complete state space analysis of islanded microgrid. The application of nonlinear sliding mode controller and the Lyapunov’s stability analysis are discussed in Section 3. The simulation results and demonstrations of proposed controller on an islanded microgrid are illustrated in Section 4 followed by concluding remarks in Section 5.
2 Islanded Microgrid System Model
Electrical loads are random and unknown in nature and as results, it may create frequency and voltage deviation with oscillations. Due to above causes, an involuntary stress is faced by distributed generations. As results, harmonic, frequency and voltage oscillations are produced [18]. Hence, a centralized controller is needed to reduce frequency and voltage oscillations against load disturbances and parametric uncertainties. Thus, a linearized model of diesel generator with excitation system and DC to AC converter model is taken and it sufficient to analyze the islanded microgrid dynamics for a small signal approach. Both generation system dynamics are described in the following subsections:
2.1 Dynamic Model of Diesel Generator
A simplified dynamics model of diesel generator with excitation system model is represented in Figure 2 and first order transfer function for small signal analysis has been considered. The diesel generator is a union of diesel engine with electric alternator. It converts mechanical energy received from a combustion engine into electrical energy and is also preferable due to economical usage of fuel in comparison to steam generators [19, 20]. The dynamic model of diesel generator mainly has three components: (a) prime mover with speed-governor valve, (b) synchronous generator, and (c) automatic excitation system.
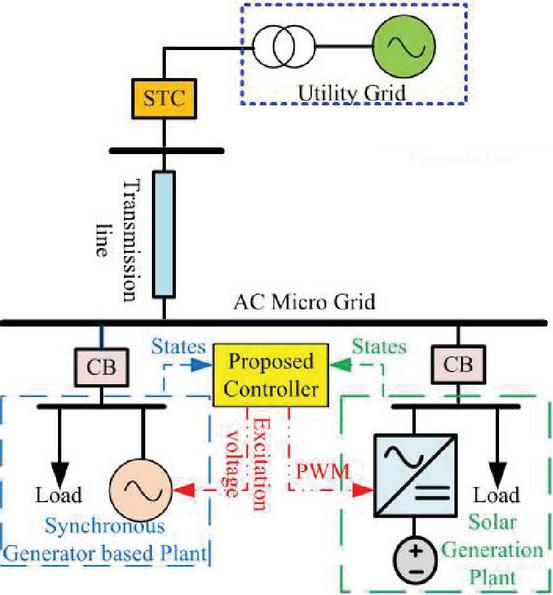
Figure 1 Schematic diagram of the microgrid.
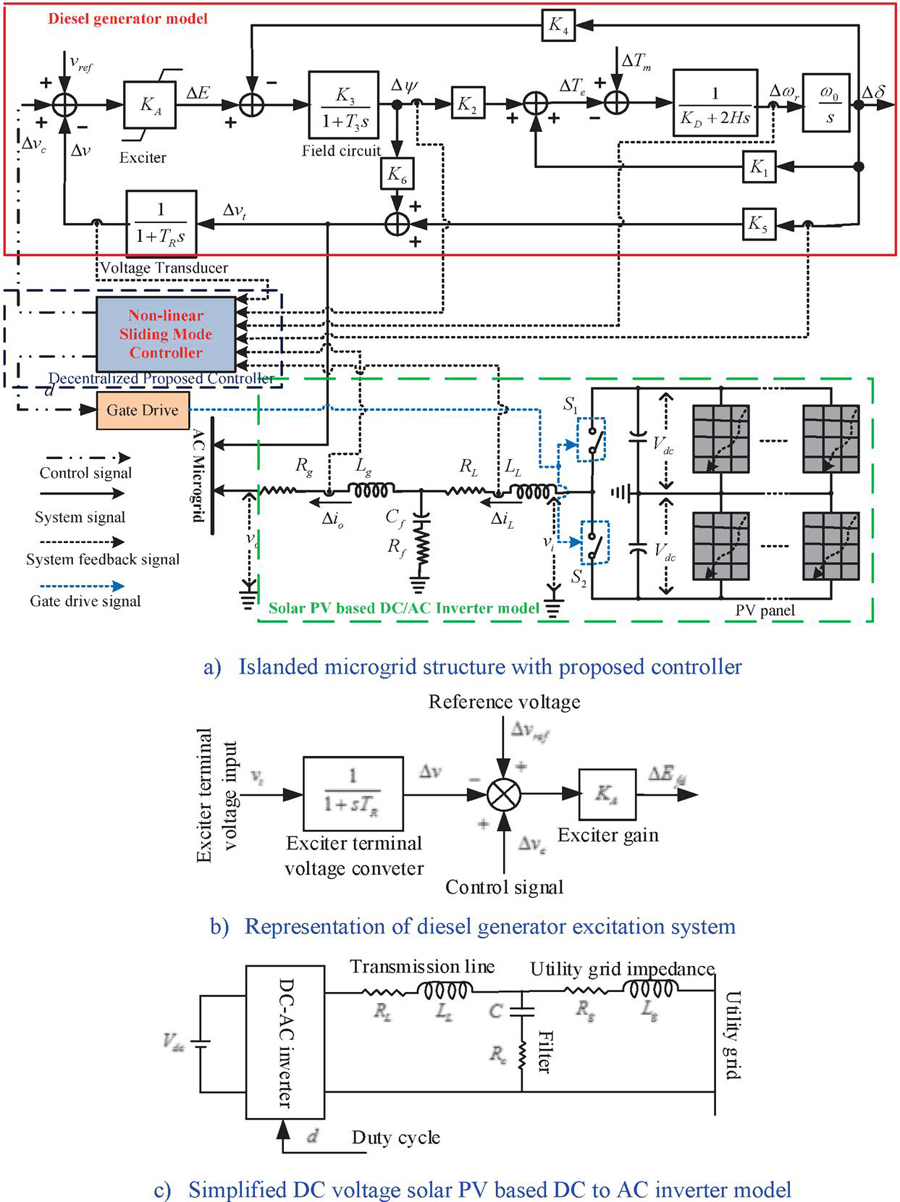
Figure 2 Microgrid structure with centralized proposed controller [17, 20].
The excitation system stabilizes the generated voltage against variation on mechanical torque uncertainties and the speed-governor valve regulates the prime mover speed linearly to minimize the power mismatch and oscillations [1, 20]. The schematic diagram of microgrid and utility grid has been shown in Figures 1 and 2(b). In this study, classical dynamic model of diesel generator is designed a synchronous generator, an AVR and a speed governor and taken from [17]. The classical diesel generator model acceleration dynamics is described as:
| (1) |
where, terms , , , and are the inertia constant (per MVA), change in mechanical torque (N-m), change in electrical torque (N-m), damping constant (N per m) and nominal frequency (Hz) respectively. Electrical torque linearized dynamic is considered [17] and substitutes in Equation (1) as:
| (2) |
where, , and are synchronizing coefficients and change in generator magnetic flux.
The dynamics relation between states generator angular speed (rad/s) and rotor angle (rad) is defined as.
| (3) |
Generator field flux dynamics are written as:
| (4) |
where, terms , , , , and are generator field system parameters. The term is derived from exciter transfer function and known as exciter gain. The state variable is field excitation voltage (volt) of the diesel generator respectively. The generator AVR is considered [17] as shown in Figure 2 and is written as:
| (5) |
Terminal voltage error can be obtained using following equation:
| (6) |
where, terms and are excitation system parameters. Value of term is always positive while term can be either positive or negative due to dependency on the external circuit impedance [17].
2.2 Model of DC to AC Inverter Dynamics
In this study, DC voltage solar PV based DC to AC inverter including battery energy storage system is considered [21] as shown in Figures 2(a) and 2(c). For small perturbation, filter dynamics are neglected and filter terminal voltage is not considered as feedback in controller design. The inverter is simple taken as bi-directional ideal switches [22] and its output voltage is varied from to as per duty cycle using centralized controller. Thus, duty cycle is defined based on and time and written as:
| (7) |
where, term is known as switching time interval. Inverter output voltage can be written using time-average approach as:
| (8) |
Now, inverter transmission line current and utility grid output current are taken as equal due to negligible filter. The equivalent dynamics of transmission line and inductive nature of utility grid [21] as shown in Figure 2 can be written as:
| (9) |
After, deviation in grid output current with negligible change in grid voltage is given as:
| (10) |
After substitution of from Equation (8) into Equation (10), it gives as:
| (11) |
2.3 Islanding Microgrid Model
However, state space model as represented in Figure 2(a) and Equations (1) to (11) are written as:
| (12a) | ||
| where, , , and are microgrid state variables, input, output and mechanical torque disturbances respectively. The system matrices , , and are matrices are given as: | ||
Now, above Equation (12) is transferred into regular form using , . After simplification, Equation (12) is rewritten as:
| (12b) |
where, and .
2.4 Objective of the Proposed Study
Basic objective of this study is to minimize frequency and voltage fluctuations in microgrid against plant uncertainties. A centralized nonlinear sliding mode control (SMC) controller is proposed to mitigate frequency and voltage fluctuations in an islanded microgrid. The proposed control scheme is capable to regulate both plants in proper coordinated way till frequency and voltage fluctuations approaches to zero. Hence, closed-loop system responses improves both transient responses as well as steady state responses simultaneously against solar DC voltage uncertainty and diesel generator parametric uncertainties.
3 Proposed Control Methodology
The sliding mode control technique is a resilient control scheme against uncertainties, outage of power or load and load disturbances in distributed generations because of its insensitivity nature towards the change in system dynamics and disturbances [23–29]. The utmost benefit of using sliding mode control (SMC) approach is its sliding action along a bounded switching surface or line. The design of sliding mode controller is divided into two dynamic phases i.e., the reaching phase and sliding phase [28, 29]. The trajectories of the closed-loop system are reached and then remains slide on it within pr-defined limit. The load disturbance and system uncertainties in dynamics of reaching phase is highly preferable for selection of nonlinear sliding surface. The nonlinear function is selected any nonlinear function having following two characteristics:
• Whenever a frequency deviation occurred, nonlinear function changes from zero to a negative of final value.
• The nonlinear function should be differential.
Hence, selected nonlinear function in this study is considered [28] as for islanded microgrid. After selection of nonlinear function, switching surface is designed using nonlinear function , initial feedback gain and positive definite matrix . The matrix term is derived from closed loop system stability criterion using linear matrix inequality (LMI) [28]. Thus, the switching surface are given using Equation (12b) as:
| (13) |
Now apply reaching and sliding conditions [28] on above Equation (13), after simplification, it give:
| (14) |
The stable trajectory of Equation (14) depends on nonlinear function and nonlinear function also depends on the . The variable term consists of linear and nonlinear terms, and vary according to frequency deviation [28]. First, whenever microgrid frequency deviation is zero means term is zero. Then nonlinear function is also zero due to zero frequency deviation and this condition is applied in Equation (14) and it gives:
| (15) |
Above Equation (15) stability is obtained using following LMI:
| (16) |
Second, islanded microgrid have non-zero frequency deviation then nonlinear function may reach its maximum final value [28]. This condition is used to apply in Equation (14) and after simplification, it gives:
| (17) |
Now equivalent damping ratio of Equation (17) is considered as equivalent final state feedback gain . The term is written as:
| (18) |
Equation (18) is written in inequality constraints as:
| (19) |
Now, Equation (19) is converted into LMI using Schur complement [28] as:
| (20) |
Hence, to achieve desired responses both LMI Equations (16) and (19) should feasible simultaneously. So, linear matrix inequalities (LMIs) optimization technique is used to obtain :
| (21) |
Theorem 1: To achieve a variable switching surface with variable damping factor of the closed loop system simultaneously, the SMC control law is design as:
| (22) |
The control terms and are control effort of diesel generator model and inverter model. The variable switching surface is bounded using positive constant () and boundary limit constant respectively.
Proof: The asymptotic convergence criteria is proved using the Lyapunov’s function as:
| (23) |
Equation (23) is differentiated and after substitution from Equations (14) and (12b) and simplification, it is written as:
| (24) |
Equation (22) is substituted in Equation (24) and after simplification, it gives:
The closed loop dynamics of microgrid with SMC law converges asymptotically as for some within a sphere radius as:
| (26) |
This completes proof.
The proposed controller design steps flow chart and state diagram are given in Figures 3(a) and 3(b) respectively.
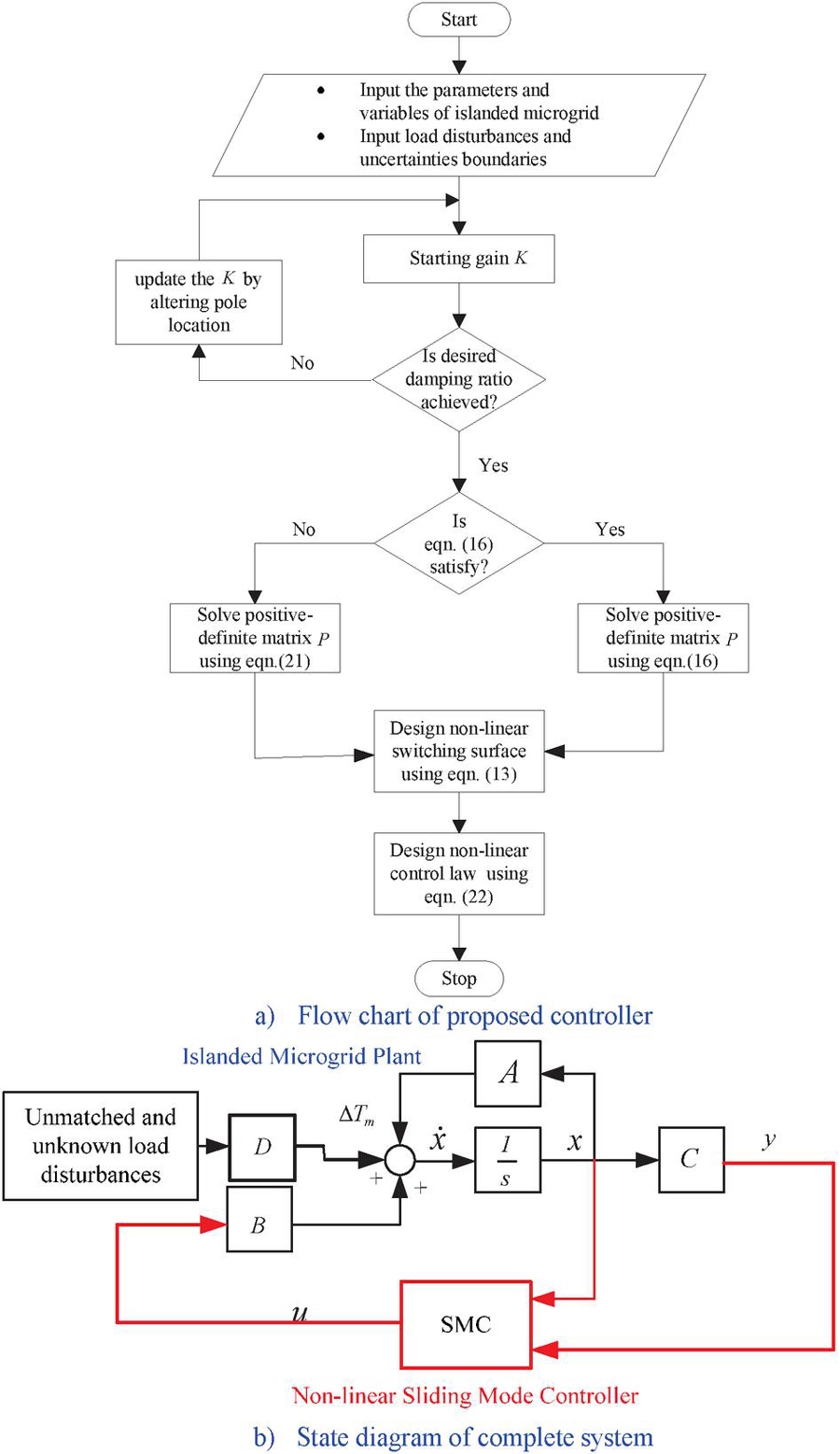
Figure 3 Flow chart of proposed controller.
4 Simulated Responses and Deliberations
To evaluate the performance of proposed control strategy, state-space dynamics of islanded microgrid is simulated using MATLAB 2014a software as shown in Figure 2(a). The microgrid system parameters are given in Table 1. In this study, microgrid contains diesel generation [17] and solar PV based battery source [20] with rating 20kW, 3-phase, 4-wire, 60 Hz, 380/220-volt, 1800 rpm and 6 kW, 400 volts respectively. The generator voltage exciter is considered as brushless and represented as first order transfer function with gain 187.0 and time constant 0.05 sec. All simulations are performed at zero initial conditions.
Table 1 Parameters and its values
| System Parameter | Values (In Unit) | System Parameter | Values (In Unit) |
| K | 0 | K | 200 |
| H | 3 | R | 0.0006 |
| K | 1.591 | m | 1.0473 |
| K | 1.5 | L | 0.153 |
| K | 0.333 | L | 1.64899 |
| R | 0.01 | L | 1.65 |
| Rg | 0.01 | m | 0.8802 |
| L | 0.005 | L | 1 |
| K | 0.12 | K | 187 |
| K | 0.3 | Lg | 0.001 |
| 376.8 | V | 400 | |
| T | 0.05 | K | 1 |
The open-loop system poles, dominant poles damping ratio and natural damping frequency of linearized microgrid system. The eigenvalues of microgrid for both cases i.e., with controller and without controller are given in Table 2. It is seen that open loop system have one poles lie on right hand side and damping ratio as well as natural frequency oscillations are too low and high respectively. As result, open loop system is unstable. The desired closed loop time characteristics are given in Table II and enhanced overall system performance against different disturbances.
Table 2 Microgrid system poles location, damping ratio and natural frequency
| Open-loop System | Closed-loop System | ||
| Damping Ratio and | Closed-loop | Damping Ratio and | |
| Open-loop System | Natural Frequency | System Poles | Natural Frequency |
| Poles Locations | (rad/sec) | Locations | (rad/sec) |
| Dominant poles: 0.913229.6993i; 0.913229.6993i; Other poles: 18.4711, 12.6009, 3.3333 | and Remark: open-loop system is unstable. | Dominant poles: 3.000. Other poles: 6.000, 12.5000.9825i, 12.5000.9825i | and Remark: closed-loop is stable. |
The performance of the sliding mode controller is demonstrated in presence of zero initial condition, DC voltage uncertainty and rotor angle feedback gain uncertainty as follows:
4.1 Islanded Microgrid Response in Presence of Rotor Angle Feedback Gain Uncertainty
The proposed controller is implemented on the islanded microgrid system and simulated with all states zero initial conditions in presence of rotor angle feedback gain uncertainty. The rotor angle feedback gain uncertainty is varied via decrease in step mechanical shaft torque input (N-m). The deviations in frequency, angular frequency, rotor torque angle and flux density in diesel generator dynamics are shown in Figure 4. It is seen that frequency is decreased in short time interval due to decrease in mechanical shaft torque input and frequency is attained nominal value by the action of nonlinear sliding mode controller.
Thus, frequency deviation is minimized via a coordinated control between excitation system of diesel generator and inverter current injections. Corresponding nonlinear function and switching trajectory of the diesel generator system only and required control effort of both diesel generator model and inverter are shown in Figure 5. From said figure, it is evident that the proposed controller exhibits zero chattering phenomena in control signals. The proposed design reduces the limitation of chattering notably without any loss in control accuracy. However, it reduces the possibility of failure of the automatic voltage regulators and inverter switches. The deviation in inverter output current and voltage, and deviation in diesel generator voltages are also shown in Figure 6. It is evident that the inverter provides extra power to minimize the frequency deviation in islanded microgrid system using proposed controller against step change in mechanical shaft torque input. The proposed control structure is capable to regulate inverter output power to minimize the frequency within a short time interval. Hence, it confirms speedy recovery of frequency without any rotor oscillation and voltage fluctuations, and reduces the limitation of chattering notably without any loss in control accuracy under step disturbance.
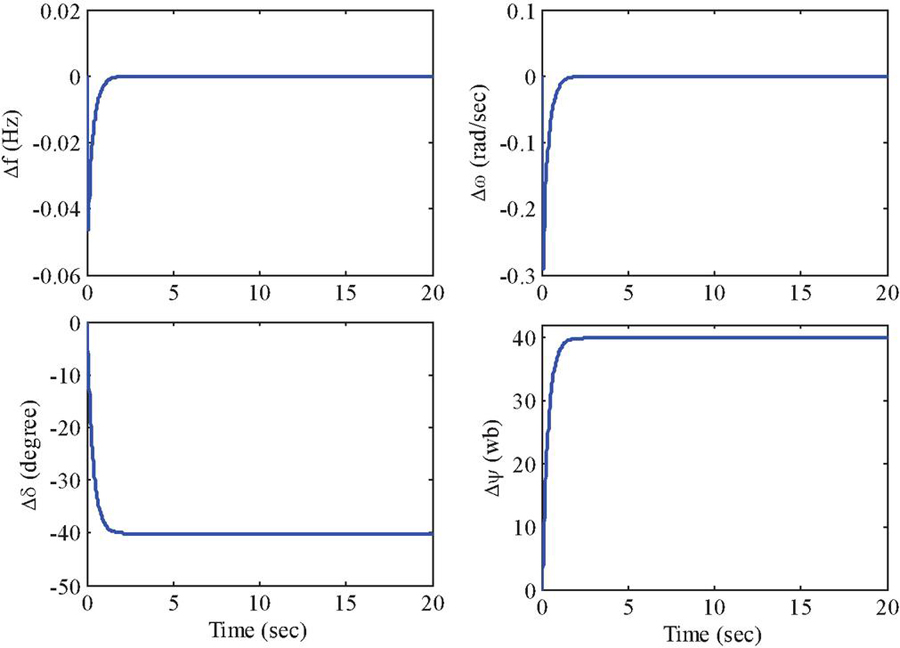
Figure 4 Deviations in frequency, angular frequency, rotor angle and flux density in presence of rotor angle feedback gain uncertainty.
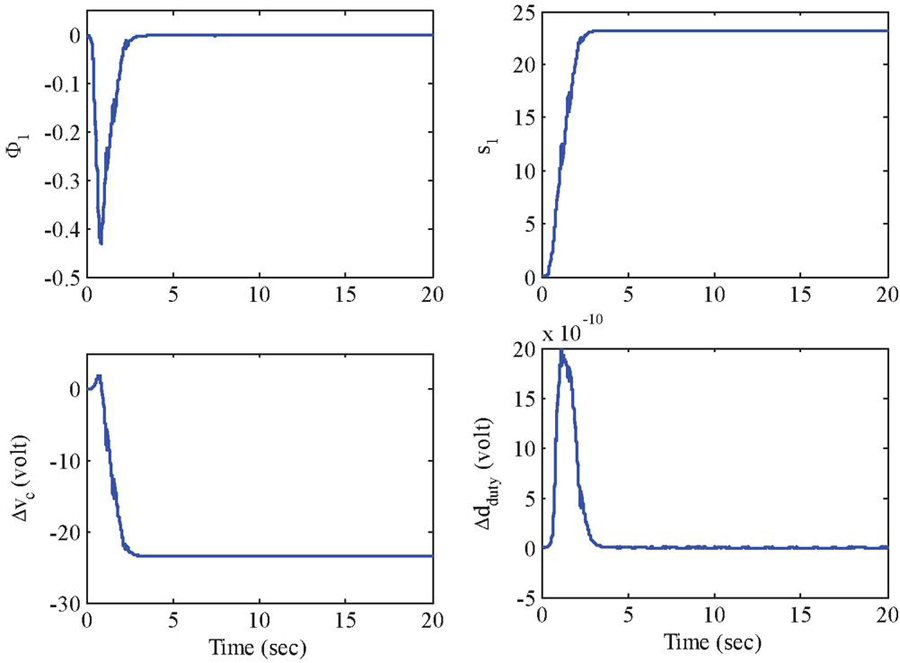
Figure 5 Diesel generator model non-linear function and switching surface, and control efforts in presence of rotor angle feedback gain uncertainty.
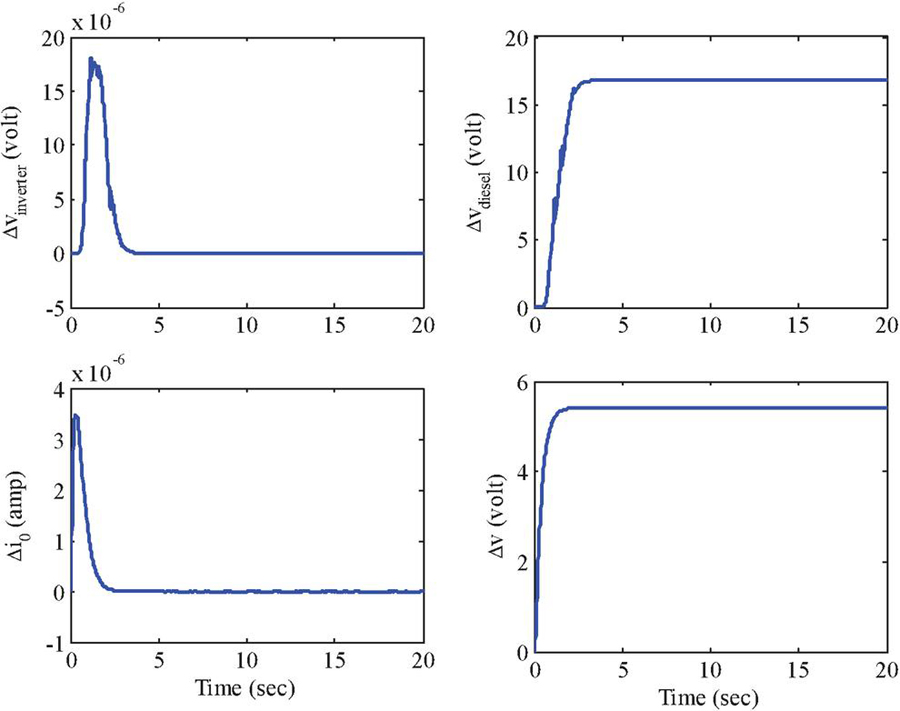
Figure 6 Deviations in voltage and current of diesel generator model and inverter model against step change in rotor angle feedback gain uncertainty.
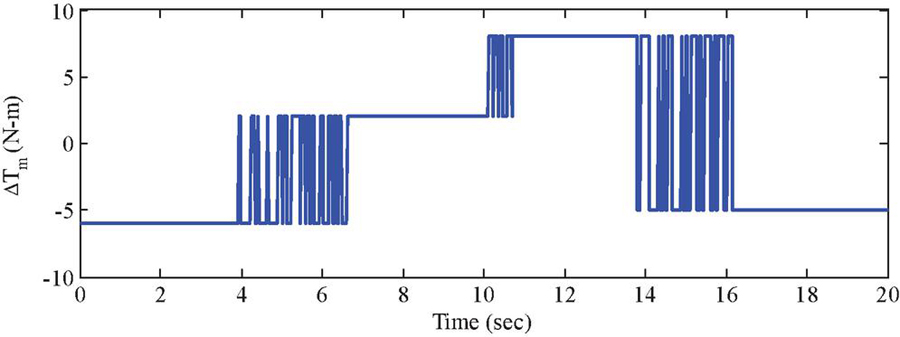
Figure 7 The typical random deviations pattern in mechanical shaft torque input in diesel generator model.
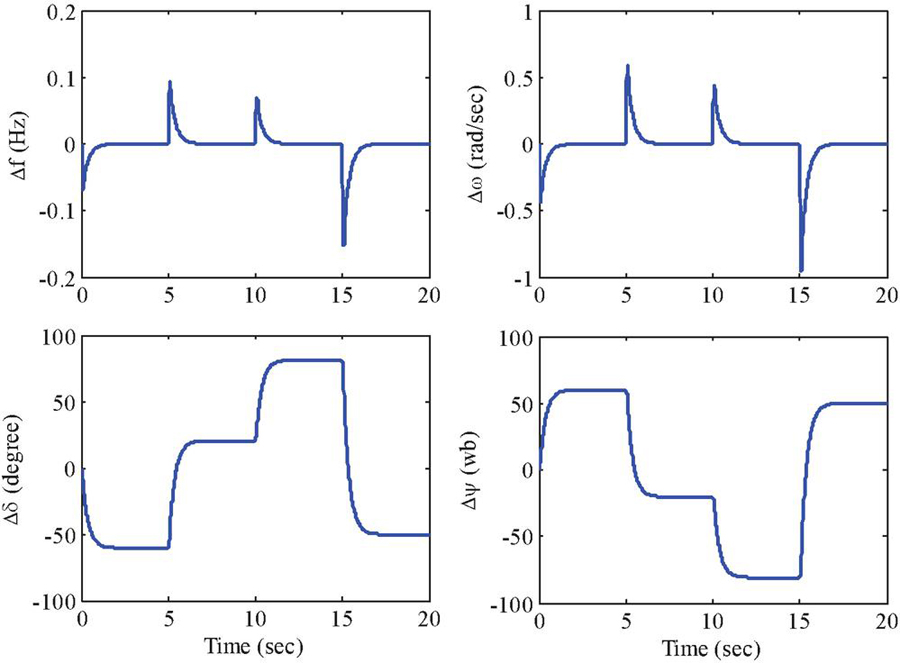
Figure 8 Deviations in frequency, angular frequency, rotor angle and flux density in presence of random step change in gain uncertainty.
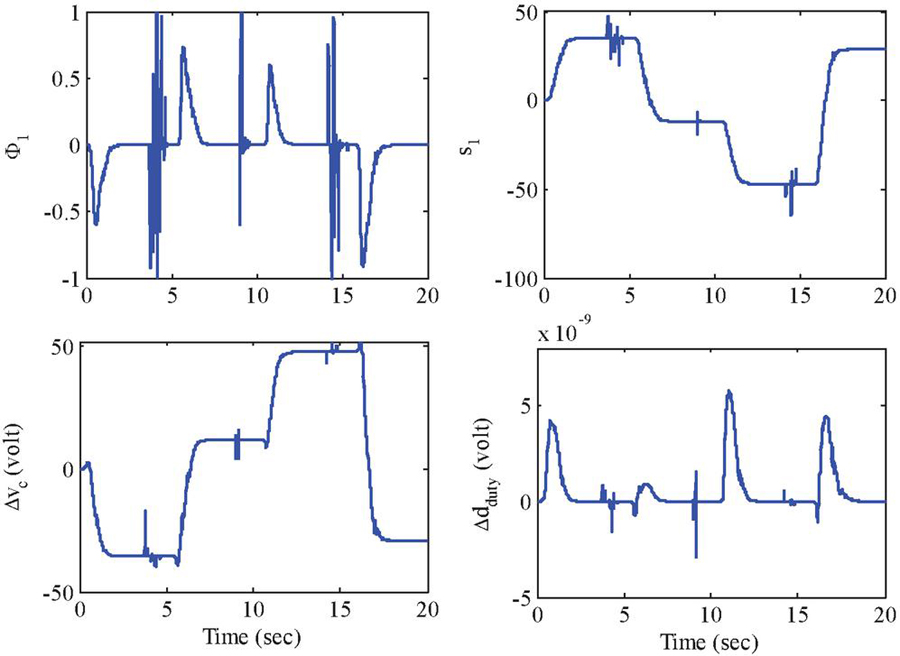
Figure 9 Diesel generator model non-linear function and switching surface, and control efforts in presence of random step change in gain uncertainty.
4.2 Islanded Microgrid Response Under Random Step Change Uncertainty Inputs Pattern in Gain
In this subsection, rotor angle feedback gain and rotor angle deviation uncertainty are varied via a typical random step change pattern mechanical shaft torque input of diesel generator model. Thus, the random (positive and negative) mechanical shaft torque is considered to analyze the effectiveness of the proposed controller scheme for islanded microgrid as shown in Figure 7. The deviations in frequency, angular frequency, rotor torque angle and flux density in diesel generator dynamics are shown in Figure 8 in presence of random change in mechanical shaft torque input patterns. It is observed that the frequency deviation is minimized within 2.0 second time interval using coordinated control approach between diesel generator model and DC voltage inverter model. The nonlinear function and switching trajectory of the diesel generator model and required control efforts for both islanded microgrid are shown in Figure 9. It is evident that the nonlinear function is varied according to frequency deviations in the microgrid. As result, the switching surface is also changed in order to minimize the chattering phenomena in control signals. Above variations are achieved by LMI optimization and reduced the limitation of chattering notably without any loss in control accuracy. Thus, proposed controller is improved both transient responses as well as steady state responses simultaneously. The deviation in inverter output current and voltage, and diesel generator voltages deviations are also shown in Figure 10. It is evident that the inverter system with proposed control scheme is capable to generate additional required power in such way that it can minimize the frequency deviations in islanded microgrid system against any change in mechanical shaft torque input. The proposed control structure sustains the closed-loop system stability effectively with proper regulation between diesel generator and DC voltage-based inverter output power within 2.0 second time interval.
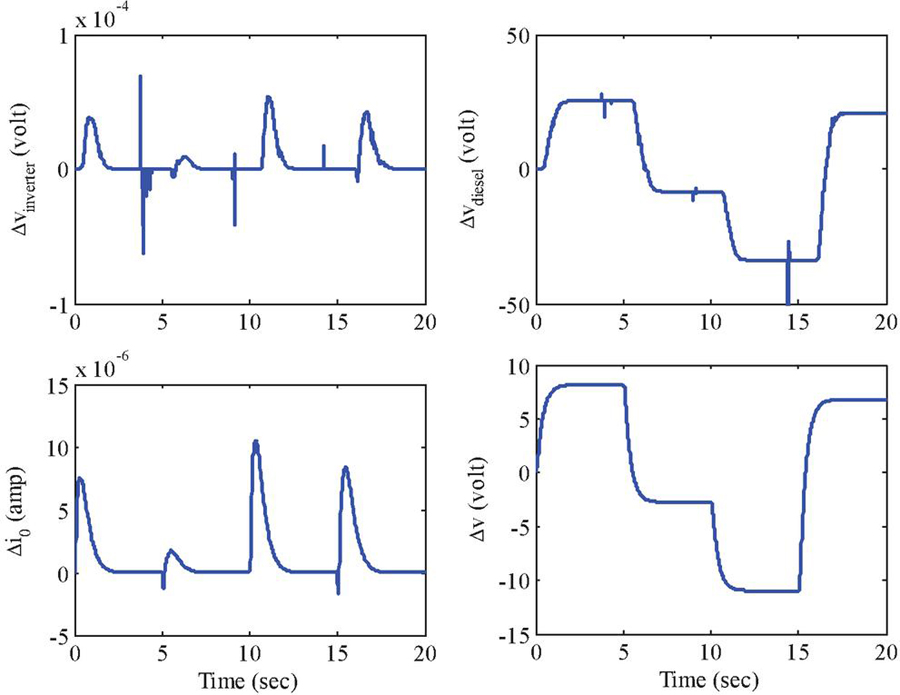
Figure 10 Deviations in voltage and current of diesel generator model and inverter model against random step change in gain uncertainty.
Hence, proposed controller confirms speedy recovery of frequency without any oscillations as well as it improves both transient responses as well as steady state responses simultaneously with reduction in the chattering against any rotor angle feedback gain channel uncertainty via mechanical shaft torque input variation.
4.3 Performance of Proposed Control Scheme Through a Comparative Simulation Study
Now, the performance of the proposed control scheme is compared with existing state proportional-integral-derivative (PID) controller [30] in presence of random rotor angle feedback gain uncertainty as shown in Figure 6. The deviations in microgrid frequency and diesel generator angular frequency, rotor angle and flux density are depicted in Figure 11. From said figure, state PID controller [30] have larger over/undershoots compared to proposed control scheme. At time instance 15.0 second, the proposed control scheme gives smaller undershoot and zero overshoots compared to state PID controller [20]. The settling time of the proposed control scheme is also smaller compared with state PID controller. The deviations in diesel generator rotor angle and flux density are also found satisfactorily compared to state PID controller without any oscillations. It is evident that the proposed control scheme enhanced closed loop stability of the islanded microgrid.
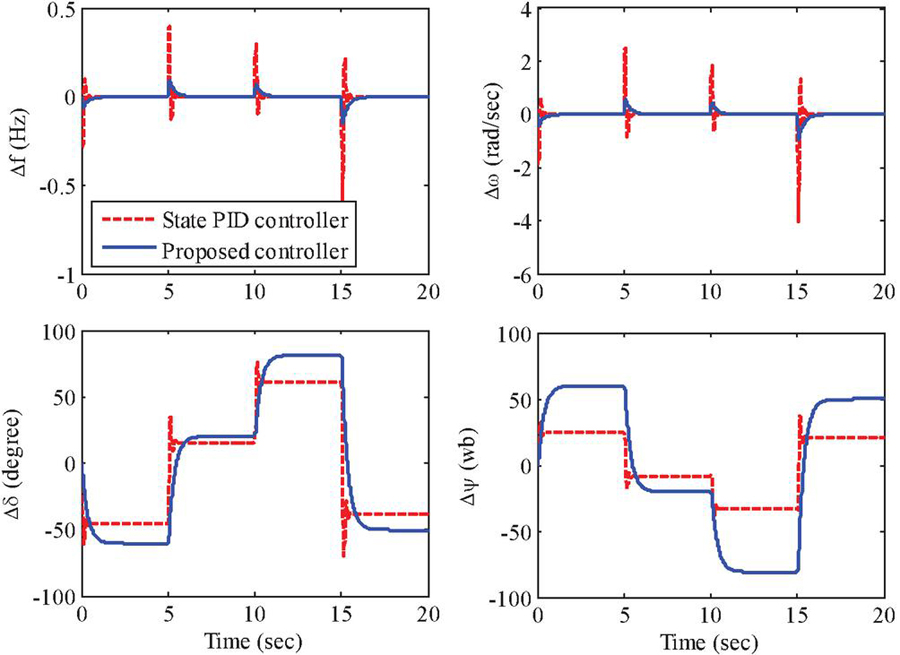
Figure 11 Comparative responses of the proposed control scheme and state PID controller [30].
4.4 Robustness of Proposed Controller Using a Comparative Simulation Analysis Against DC Voltage Uncertainty and Diesel Plant Parametric Uncertainty
In addition, the robust characteristics of the proposed control scheme is demonstrated and compared with state PID controller in presence of solar plant DC voltage uncertainty and diesel generator parametric uncertainties. Thus, the 20 percent DC voltage input variation is considered randomly as shown in first figure in Figure 12. The diesel generator d-q frame has uncertainty due to unequal flux distributions and considered here as similar to second figure depicted in Figure 12. The automatic voltage regulator (AVR) has also several uncertainties and one uncertainty in exciter gain is assumed as equivalent pattern as shown in third figure of Figure 12. Similarly, the inverter output side, an uncertainty is considered in the transmission line inductance parameter and represented in fourth figure of Figure 12 respectively.
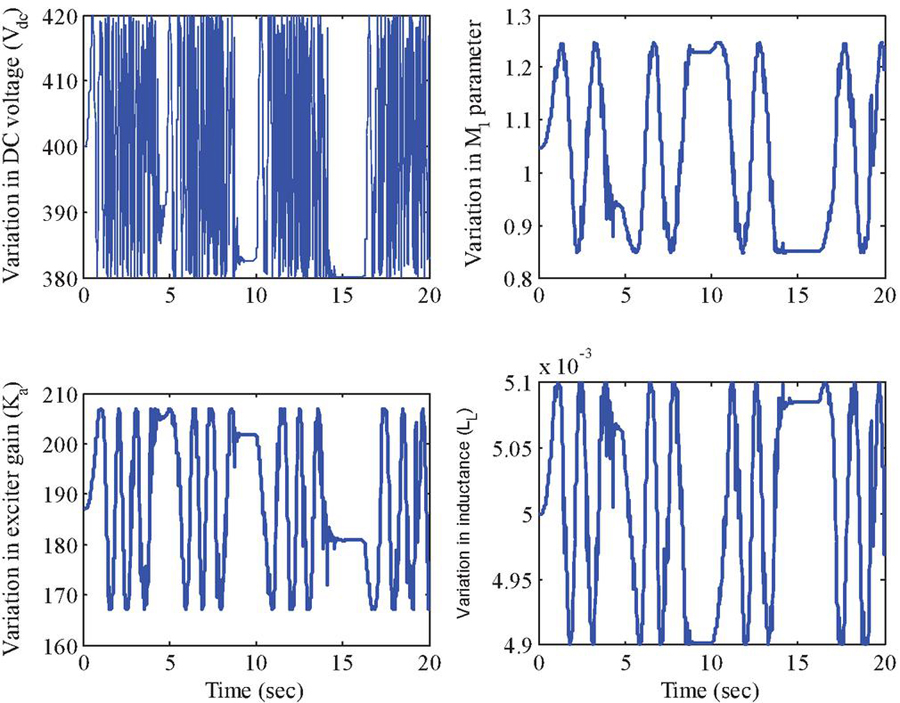
Figure 12 Microgrid parametric uncertainties patterns.
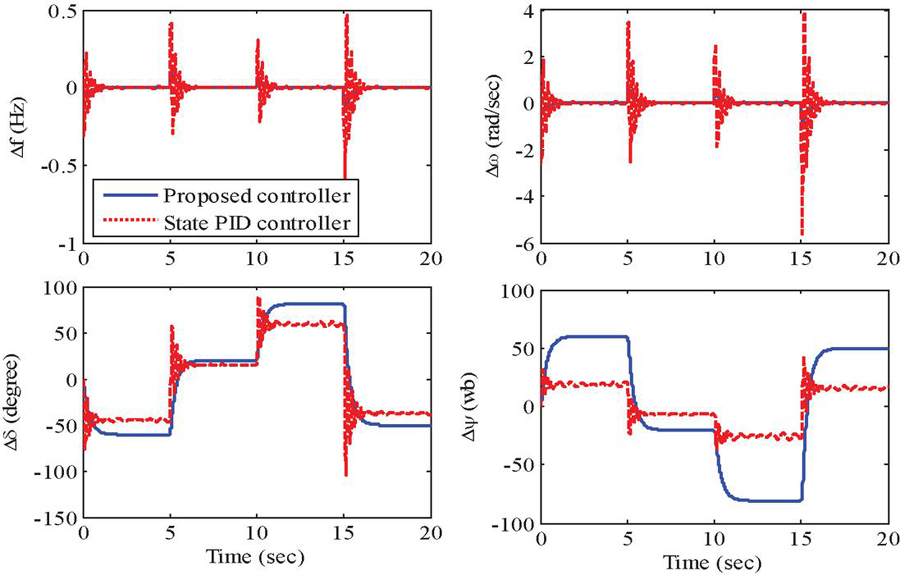
Figure 13 Comparative performance of the proposed control scheme in presence of parameter uncertainties.
However, the proposed control scheme and state PID controller [30] is simulated in presence of the above uncertainties in islanded microgrid system. The deviations in microgrid frequency and diesel generator angular frequency, rotor angle and flux density are depicted in Figure 13 in the presence of uncertainties in DC voltage, generator d-q frame parameter, exciter gain and line inductance. Due to presence of parameter uncertainties, state PID controller performance deteriorates in terms of larger time characteristics while proposed control scheme is completely insensitive against above parameters uncertainties.
The proposed control scheme has negligible oscillations in diesel generator rotor angle and flux density deviations compared to state PID controller. It is observed that nonlinear sliding mode-based control scheme sustained the islanded microgrid system insensitive even in presence of parameter uncertainties. Thus, proposed control scheme is able to minimize islanded microgrid frequency issue effectively.
4.5 Effectiveness of Proposed Controller Demonstration Using Performance Indices
In this subsection, the performance indices of the proposed control scheme and state PID controller [30] i.e., integral square error (ISE), integral absolute error (IAE) and integral time absolute error (ITAE) are obtained for the scenarios 4.1, 4.2, 4.3 and 4.4 against step change and random step change in mechanical shaft torque input in diesel generator model.
Table 3 The performance indices against step and random change in torque input
| Scenarios | ISE | IAE | ITAE | |
| Step change in mechanical torque (scenario-4.1) | 0.0026 | 0.0061 | 0.0170 | |
| Random change in mechanical torque (scenario-4.2) | 0.0511 | 0.1410 | 1.3118 | |
| State PID controller [30] (scenario-4.3) | 0.1030 | 0.4460 | 4.1358 | |
| In presence of parameter | Proposed controller | 0.0511 | 0.1410 | 1.3118 |
| uncertainties (scenario-4.4) | PID controller [30] | 0.1120 | 0.4889 | 4.5719 |
The islanded microgrid frequency deviation is considered in the calculation of the performance indices as given in Table 3. It is evident that the proposed control exhibits robust performance against any change in the mechanical shaft torque input and microgrid parameter uncertainties compared to state PID controller [30]. As results, it enhances the closed-loop system stability, robustness and its applicability.
5 Conclusions
In this paper, a linearized model of both diesel generator with excitation system model and DC voltage solar PV based DC to AC inverter model is considered for small signal analysis and farmed as an islanded microgrid. A nonlinear sliding mode controller proposed to mitigate the frequency and voltage fluctuations, and also minimize the rotor oscillation problems in an islanded microgrid. Based on LMI optimization toolbox and Lyapunov stability theorem, enough states derived to assure the asymptotic stability of the nonlinear sliding surface and system dynamic error. The control law obtained to ensure the existence of sliding mode around nonlinear surface in limited time. The proposed controller design effectively interpreted the challenges arises due to uncertainties in the plants. Hence, the proposed controller effectively generated additional required control efforts in proper coordinated way till rotor oscillation and voltage fluctuations approaches to zero. In addition, the closed-loop system responses improved both transient responses and steady state responses simultaneously against solar DC voltage uncertainty and diesel generator parametric uncertainties. The performance and robustness of the proposed controller is compared with state PID controller. As results, proposed controller confirmed speedy recovery of frequency without any oscillations and reduced the limitation of chattering notably without any loss in control accuracy. In future, the integration of the microgrid will be analyzed using a centralized controller in presence of communication delays.
Acknowledgments
Conflict of interest statement: The authors declare no conflicts of interest regarding this article.
Authors contribution: All the authors have accepted responsibility for the entire content of this submitted manuscript and approved submission.
Research Funding: Authors declare that there are no known competing financial interests or personal relationships that could have appeared to influence the work reported in this article.
References
[1] Guoping, G., Weijun, W., and Longbo, M. (2018). An Overview of Microgrid Planning and Design Method. 2018 IEEE 3rd Advanced Information Technology, Electronic and Automation Control Conference (IAEAC). Chongqing, 326–329.
[2] Pathak, G., Singh, B., and Panigrahi, B.K. (2016). Control of Wind-Diesel Microgrid Using Affine Projection-Like Algorithm. IEEE Transactions on Industrial Informatics. 12(2), 524–531.
[3] Kumar, R.K., and Kalpana, C. (2019). Battery Monitoring and Control System for Photovoltaic based DC Microgrid International Journal of Emerging Electric Power Systems. 20(6), 20190133. https://doi.org/10.1515/ijeeps-2019-0133
[4] Sandelic, S., Peyghami, S., Sangwongwanich, A., and Blaabjerg, F. (2022). Reliability aspects in microgrid design and planning: Status and power electronics-induced challenges. Renewable and Sustainable Energy Reviews, 159, 112127.
[5] Barik, A.K., Jaiswal, S., and Das, D.C. (2022). Recent trends and development in hybrid microgrid: a review on energy resource planning and control. International Journal of Sustainable Energy. 41(4), pp. 308–322.
[6] Choudhury, S. (2022). Review of energy storage system technologies integration to microgrid: Types, control strategies, issues, and future prospects. Journal of Energy Storage. 48, 103966.
[7] Kanakadhurga, D., and Prabaharan, N. (2022). Demand side management in microgrid: A critical review of key issues and recent trends. Renewable and Sustainable Energy Reviews. 156, 111915.
[8] Yang, Y., and Yang, P. (2022). A novel strategy for improving power quality of islanded hybrid AC/DC microgrid using parallel-operated interlinking converters. International Journal of Electrical Power & Energy Systems. 138, 107961.
[9] Yang, B., Yu, L., Zhang, X., Wang, J., Shu, H., Li, S., He, T., Yang, L. and Yu, T. (2019). Control of superconducting magnetic energy storage systems in grid-connected microgrids via memetic salp swarm algorithm: An optimal passive fractional-order PID approach. IEEE Transactions on Smart Grid, 13(14), 5511–5522.
[10] Yang, B. Tao, Y. Shu, H., Dong, J., Chen, L., Sang, Y., and Jiang, L. (2018). Robust sliding-mode control of wind energy conversion systems for optimal power extraction via nonlinear perturbation observers. Applied Energy. 210, pp. 711–723.
[11] Khokhar, B., Dahiya, S., and Parmar, K.P.S. (2021). Load frequency control of a microgrid employing a 2D Sine Logistic map based chaotic sine cosine algorithm. Applied Soft Computing, 109, 107564.
[12] Latif, A., Suhail Hussain, S.M., Das, D.C., and Ustun, T.S. (2021). Double stage controller optimization for load frequency stabilization in hybrid wind-ocean wave energy based maritime microgrid system,” Applied Energy. 282, 117161.
[13] Zhao, X., Lin, Z., and Gong, B.F.S. (2021). Research on frequency control method for micro-grid with a hybrid approach of FFR-OPPT and pitch angle of wind turbine,”, International Journal of Electrical Power & Energy Systems. 127, 106670.
[14] Kumar, D., Mathur, H.D., Bhanot, S., and Bansal, R.C. (2020). Modeling and frequency control of community micro-grids under stochastic solar and wind sources,” Engineering Science and Technology, an International Journal. 23(5), pp. 1084–1099. https://doi.org/10.1016/j.jestch.2020.02.005.
[15] Yadav, M., and Singh, N. (2021). Small-signal modeling based hybrid optimized current and voltage controller for unbalanced DC microgrid. International Transactions on Electrical Energy Systems. 31(3). https://doi.org/10.1002/2050-7038.12797
[16] Eberlein, S. and Rudion, K. (2021). Small-signal stability modelling, sensitivity analysis and optimization of droop-controlled inverters in LV microgrids. International Journal of Electrical Power & Energy Systems. 125, 106404.
[17] P. Kundur (1994). Power System Stability and Control, McGraw hill: New York. pp. 780–808.
[18] Willenberg, D., Winkens, A., and Linnartz, A. (2020). Impact of wind turbine generator technologies and frequency controls on the stable operation of medium voltage islanded microgrids. Electric Power Systems Research. 155, 106760.
[19] Zolfaghari, M, Abedi, M., and Gharehpetian, G.B. (2019). Power Flow Control of Interconnected AC–DC Microgrids in Grid-Connected Hybrid Microgrids Using Modified UIPC. IEEE Transactions on Smart Grid, 10(6), 6298–6307.
[20] Taher, S.A., Zolfaghari, M., Cho, C., Abedi, M., and Shahidehpou, M. (2017). A New Approach for Soft Synchronization of Microgrid Using Robust Control Theory. IEEE Transactions on Power Delivery. 32(3), 1370–1381.
[21] Meriem, N. (2020). Frequency regulation of a weakly connected microgrid using the fuzzy-PID controller. International Journal of Emerging Electric Power Systems. 21(6), 20200157. https://doi.org/10.1515/ijeeps-2020-0157
[22] Javad, F., and Henry, S. (2019). Algebraic connectivity conditions for synchronization in low-inertia microgrids with adaptive droop-controlled inverters. International Journal of Electrical Power & Energy Systems, Elsevier, 111, 493–507.
[23] Tapiaa, A., Bernalb, M., and Fridmana, L. (2017). Nonlinear sliding mode control design: An LMI approach. Systems & Control Letters. 104, 38–44.
[24] Pathan, M. and Thosar, A. (2018). Study on Microgrids and Its Control Using Conventional and Sliding Mode Control. 2018 International Conference on Current Trends towards Converging Technologies (ICCTCT). Coimbatore, 1–7.
[25] Prasad, S., Purwar, S., and Kishor, N. (2017). Non-linear sliding mode-based load frequency control for power systems using unknown-input-observer. 2017 Indian Control Conference (ICC), Guwahati, 233–239.
[26] Chugh, M., and Prasad, S. (2019). Mitigation of False Data Injection on Frequency Regulation using Non-linear Sliding Mode Control. 2019 International Conference on Power Electronics, Control and Automation (ICPECA). New Delhi, India, 1–6.
[27] Mi, Y., Zhang, H., Fu, Y., Wang, C., Loh, P.C., and Wang, P. (2019). Intelligent Power Sharing of DC Isolated Microgrid Based on Fuzzy Sliding Mode Droop Control. IEEE Transactions on Smart Grid, 10(3), 2396–2406.
[28] Prasad, S., Purwar, S., and Kishor, N. (2017). Non-linear Sliding Mode Load Frequency Control in Multi-area Power System. Control Engineering Practice. 61, 81–92.
[29] Prasad, S., Purwar, S., and Kishor, N. (2019). Load frequency regulation using observer based non-linear sliding mode control. International Journal of Electrical Power & Energy System. 104, 178–193.
[30] Barsanti, R. J. (2015). Experiments with PID Controllers using State Feedback Design Techniques. Proceedings of the IEEE Southeast Conference. 1–2.
Biographies

Ishika Singh received B.Tech degree in Electrical Engineering from Dr. A.P.J. Abdul Kalam Technical University (AKTU) (formerly UPTU) in 2019. She is currently pursuing master degree in Power System Engineering at the Department of Electrical, Electronics and Communication Engineering, School of Engineering, Galgotias University, Delhi-NCR, India. Her research area includes microgrid operation and control.

Sheetla Prasad received the bachelor’s degree (B.Tech.) in Electrical and Electronics Engineering from Biju Patnaik University of Technology, Rourkela, India in 2010, the master degree in Power Systems from National Institute of Technology, Tiruchirappalli India in 2012, and the philosophy of doctorate (Ph.D.) degree in Electrical Engineering from Motilal Nehru National Institute of Technology Allahabad, India in 2017 respectively. He is currently working as an Associate Professor at the Department of Electrical, Electronics and Communication Engineering, School of Engineering, Galgotias University, Delhi-NCR, India. His research interest includes, sliding mode control, load frequency control, cyber attacks on automatic generation systems, microgrid operation and control, Intelligent controller design, Multi-terminal DC system power flow control, droop control and many more. He has been serving as a reviewer for many highly repute IEEE, IET and Elsevier journals.

Vipin Chandra Pal was awarded B.Tech degree in Electronics Instrumentation and Control from Dr. A.P.J. Abdul Kalam Technical University (AKTU) (formerly UPTU) in 2002. He has completed M.Tech (Control & Instrumentation) from MNNIT Allahabad in 2012 and received Gold Medal also. He has obtained Ph.D in 2017 from MNNIT Allahabad, Uttar Pradesh. He is currently working as an Assistant Professor at the Department of Electronics & Instrumentation Engineering, Faculty of Engineering, NIT Silchar, Assam. His research areas include Time Delay Systems, Robust & Adaptive Control, Lyapunov Stability, Fractional Order Systems, Modeling of Dynamical Systems, Linear and Nonlinear Multi-Dimensional Systems etc.
Distributed Generation & Alternative Energy Journal, Vol. 38_2, 611–640.
doi: 10.13052/dgaej2156-3306.38211
© 2023 River Publishers