Lithium-Ion Battery State of Charge Estimation Using Deep Neural Network
Srinivas Singirikonda and Yeddula Pedda Obulesu*
School of Electrical Engineering, Vellore Institute of Technology, Vellore, Tamilnadu, India
E-mail: s.srinivas241@gmail.com; yp.obulesu@vit.ac.in
*Corresponding Author
Received 08 December 2021; Accepted 29 January 2022; Publication 27 February 2023
Abstract
In an electric vehicle (EV), the battery management system (BMS) is crucial for managing the health and safety of the battery. The accurate estimation of battery state of charge (SOC) offers critical information about the battery’s remaining capacity. The SOC of the battery mainly depends on its non-linear internal parameters, battery chemistry, ambient temperature, aging factor etc. So, accurate SOC estimation is still a significant challenge. Many researchers have developed several model-based methods that are more complex to develop. Another approach is a data-driven based SOC estimation algorithm, which is less complex but requires more data and it may be inaccurate. In this context, this paper presents a robust and accurate SOC estimation algorithm for a Lithium-ion battery using a deep learning feed-forward neural network (DLFFNN) approach. The proposed algorithm accurately characterizes the battery’s non-linear behavior. To develop a robust SOC estimation algorithm, data is collected at different temperatures with 5% error in data (4 mV-voltage, 110 mA-current, C temperature) is added to battery datasets. The obtained results demonstrated that the performance of the proposed DLFNN is robust and accurate on different drive cycles with 1.14% Root mean squared error (RMSE), 0.66% mean absolute error (MAE), and 6.65% maximum error (MAX).
Keywords: Battery management system, deep learning, feed-forward neural network. lithium-ion battery, state of charge estimation.
1 Introduction
The usage of electric vehicles is increasing globally to reduce air pollution produced by traditional internal combustion (IC) engines vehicles. However, the most significant difficulty with electric vehicles is their battery, which is a more expensive component, whose rating is determined by its cell chemistries. The other factors affecting EV batteries are their safety, capacity, aging, self-discharging rate, operating temperature range, and time-consuming for recharging, type of cooling system. Lithium-ion (Li-ion) battery is getting more attention than the other batteries due to their low self-discharging rate, extended lifecycle, no memory effect, high energy efficiency, high power density, and high-power characteristics [1]. The battery’s performance also depends upon the driving conditions and ambient temperatures [2]. The battery management system (BMS) plays a crucial role in controlling and improving battery performance and health by performing various tasks, such as battery temperature monitoring, battery charging, discharge control, and providing over-current and over-voltage protection and fault detection and diagnosis [3, 4].
The battery’s remaining capacity is determined by estimating its SOC, which is the most challenging task for many real-world electric vehicle batteries [5] due to their non-linear internal parameters and unknown driving style of the driver. No BMS can directly measure the battery SOC; as a result, it must be estimated based on the battery parameters, such as voltage, current, and temperature. So, a robust estimation technique is required, which can determine the accurate SOC of the battery under various operating conditions. In the literature, several direct and indirect SOC estimation methods were proposed. Such as coulomb counting method [6], open-circuit voltage method [7], model-based methods (Kalman filter algorithms) [8–11], Luenberger observer [12], sliding mode [13], H and Hybrid methods [14–16]. However, these methods required complete knowledge of the battery significant model development domain knowledge. The protection and filter circuit design are required for model-based design, which needs more parameter tuning efforts.
Furthermore, various machine learning (ML) algorithms have been proposed in the literature, such as fuzzy logic [17], artificial neural networks [18], radial basis neural network [19], support vector regression, random forest [20, 21], and recurrent neural network (Long Short-Term Memory (LSTM) and Convolution neural network (CNN) [22, 23] and various combinations of the algorithms. These data-driven ML estimating algorithms were found to be more accurate than other methods in the literature, such as model-based approaches. Most of these machine learning-based approaches can replicate the non-linear properties of the battery cell with a minimal amount of domain knowledge; it is not necessary to be aware of the internal details of the battery cell. As a result, neural network-based deep learning and machine learning techniques are gaining attention. Creating, training, and testing with deep learning neural networks has become much easier and faster than before due to advancements in Graphics Processing Units (GPUs), which can perform parallel and introduce matured machine learning frameworks.
Without using any adaptive filters, a data-driven Recurrent Neural Network (RNN) with an LSTM algorithm was proposed in [24] for battery SOC estimation from measured battery parameters. In [25], RNN based gated recurrent unit (GRU) algorithm was proposed to estimate the SOC of the battery at different temperatures, the accuracy of this algorithm is more than conventional RNN-LSTM with 3.5% less RMSE. In [23] an RNN-based combined CNN-LSTM algorithm for Li-ion battery SOC estimation was proposed. The accuracy of SOC estimation increased considerably compared to other LSTM algorithms, but it is a very complex algorithm to implement and takes more time for each iteration than other algorithms. The majority of existing data-driven algorithms for battery SOC estimation in the literature are CNN and LTSM-based, which can provide more accurate results for images and text data, but battery SOC estimation is related to time series analysis. As a result, these CNN and LSTM-based approaches are ineffective for estimating battery SOC.
This paper proposed a deep learning feed-forward neural network (DLFFNN) algorithm for battery SOC estimation to address this issue. The main advantage of this proposed DLFFNN is that it is the best suitable algorithm for time series analysis because it requires fewer computations for each time step operation and uses less computing power to train the overall network, and it is simpler than other deep learning algorithms. The proposed network is trained in offline mode, and the proposed estimation approach has three main contributions, they are:
1. Improved robustness and accuracy of battery SOC estimation.
2. The DLFFNN can map measured input signals (V, I, T, V, I) directly to the output signal (battery SOC) without using any adaptive filter.
3. The DLFFNN network is trained to estimate SOC at various ambient temperatures with augmented datasets.
The rest of the paper has been arranged as follows. The dataset preparation and the proposed FLDDNN algorithm is discussed in Section 2. Simulation settings and evolution criteria is discussed in Section 3. Results and discussion are explained in Section 4. The conclusions and references are provided in Sections 5 and 6, respectively.
2 Dataset Preparation and SOC Estimation with DLFFNN
The architecture of the proposed DLFFNN is shown in Figure 1.
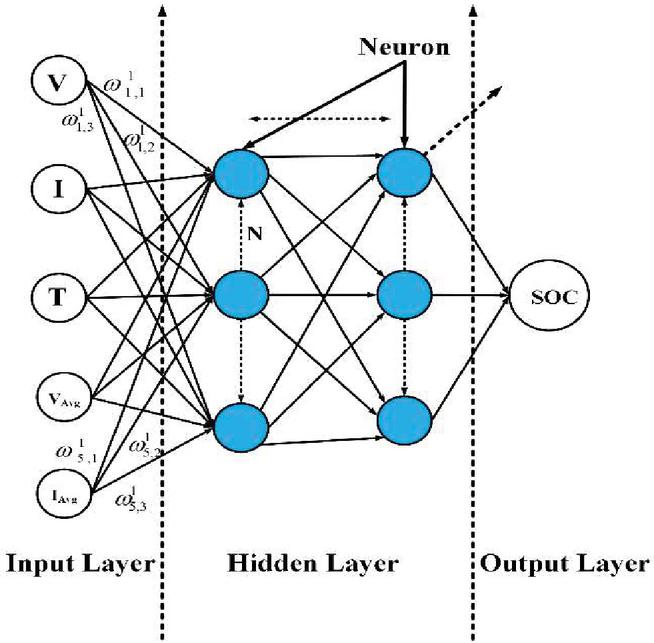
Figure 1 The proposed DLFFNN structure for Li-ion battery SOC estimation.
Where measured voltage (V), current (I), temperature (T), average voltage (V), and average current (I) are provided as input to the network, SOC is obtained as output, w is weight of the neuron and N is number of neurons,
The proposed feed-forward deep learning neural networks don’t have any internal memory, like other deep learning neural networks (LSTM) that store past data to estimate future values. To address this issue, average voltage and currents are fed into the network as input to provide recent past memory. The neural network (NN) is made up of a number of hidden layers, each of which contains several neurons. So, a large amount of datasets are required to train the neural network.
The supervised machine learning is applied in this DLFFNN training process, and the cost function is used to find the difference between the NN output and the desired target (i.e., “the sum of squared estimation errors”). The generalized cost function for NN can be expressed as Equation (1).
| (1) |
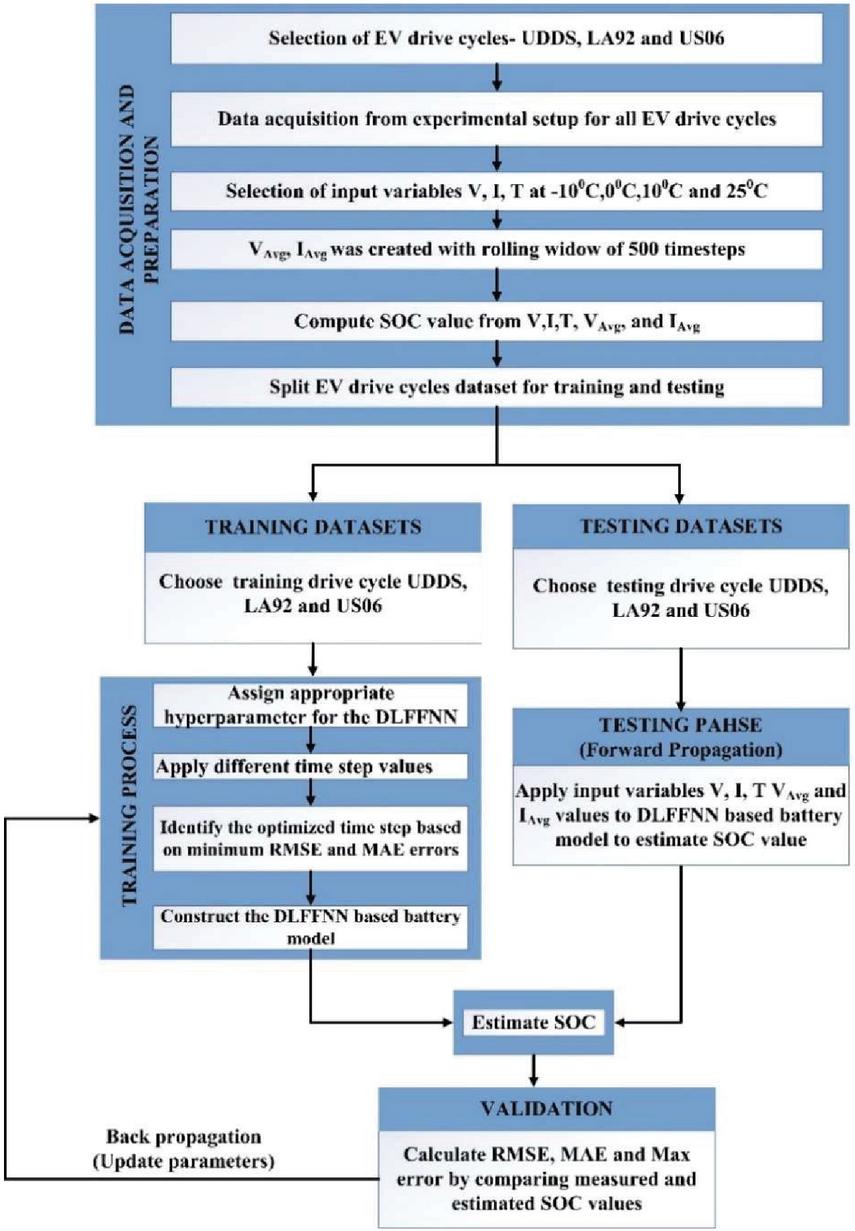
Figure 2 Process flow for SOC estimation using DLFFNN.
The training, testing, and validation process is shown in the flow chart, which is given in Figure 2. The training datasets are classified into batches and applied to the DLFFNN network. Later the Feed-forward propagation generates an estimated SOC value and compares it with the measured SOC value to determine the error. The error is backpropagated by changing the values of each network neuron’s weights and biases using a sequence of partial derivatives. Then the next iteration begins, and this process continues until the error value reaches its target value. During the training process, independent testing and validation datasets are used to evaluate the accuracy of the proposed approach in regular time intervals. The proposed algorithm is tested with various battery datasets at different temperatures to demonstrate that the trained model can accurately estimate the battery’s SOC under any situation.
The proposed DLFFNN is a data-driven approach. So, the data quality can be evaluated by the amount of noise data added to the measured datasets, which trains the neural network. However, the noise error is undesirable in the application but unavoidable in most instances and should be considered while training and testing an NN. As a result, the noise in the targeted region becomes part of the datasets, and it will be utilized to improve the robustness and accuracy of the SOC estimation algorithm.
When DLFFNN is used to estimate SOC, a common dataset (D) is defined to train the networks, as shown in Equation (2).
| (2) |
Where is ideal SOC value, is input vector at time step . The input vector is defined as shown in Eqn. 3.
| (3) |
The drawback of DLFFNN is that it does not have any internal memory like LSTM; however, this may be overcome by feeding the average voltage and current, which will provide the network memory of the recent past. As a result, compared to other RNN methods, the DLFFNN network requires less computational power to train networks and computations for every time step of the operation.
EV driving cycles are used to train and evaluate the proposed DLFFNN based SOC estimate method, since they characterize the dynamic behavior of real EV operating circumstances. The dataset for this study was obtained from [25]. The 2.9Ah capacity cylindrical Panasonic (NCR18650PF) Li-ion battery dataset (parameters of measured V, I, T, Ah consumed or supplies) was collected by using standard test procedure for every 0.1sec time interval. The Li-ion battery cell specifications details are provided in Table 1.
Table 1 Battery specifications
| Specification | Rating |
| Rated Capacity (At 25C) | Minimum-2750 mAh |
| Typical.2900 mAh | |
| Nominal voltage | 3.6 V |
| Charging | CC-CV, 1375 mA, 4.2 V, 4.0 hrs |
| Weight (max) | 48 g |
| Temperature | Charge: 0C to 45C |
| Discharge: 20C to 60C | |
| Storage: 20C to 50 C | |
| Energy density (based on bare cell dimensions) | 577 Wh/l |
| 207 Wh/kg | |
| Dimensions | 65.3 mm(hight)*18.5 mm (Diameter) |
A test battery cell was subjected to three separate standard drive cycles in the dataset to improve the amount of training and testing data available. Those are LA92 (Los Angeles 92), US06 (Supplemental Federal Test Procedure), and UDDS (Urban Dynamometer Driving Schedule).
The fundamental reason for selecting these three driving cycles is to estimate the SOC of the battery under real-world EV operating conditions for the temperatures range of C to 25C. Each driving cycle is repeated until the battery is fully discharged; after fully draining the battery, it will be charged in CCCV (constant current and constant voltage) mode with a 1C rating. The battery datasets are divided into two subsets that are 70% for training and 30% for testing. The datasets were organized in successive discharging and charging cycles order.
At 10C, the battery voltage, current, power, ampere-hour, temperature, watt-hour, and SOC are obtained for the UDDS, LA92, and US06 drive cycles, as shown in Figure 3.
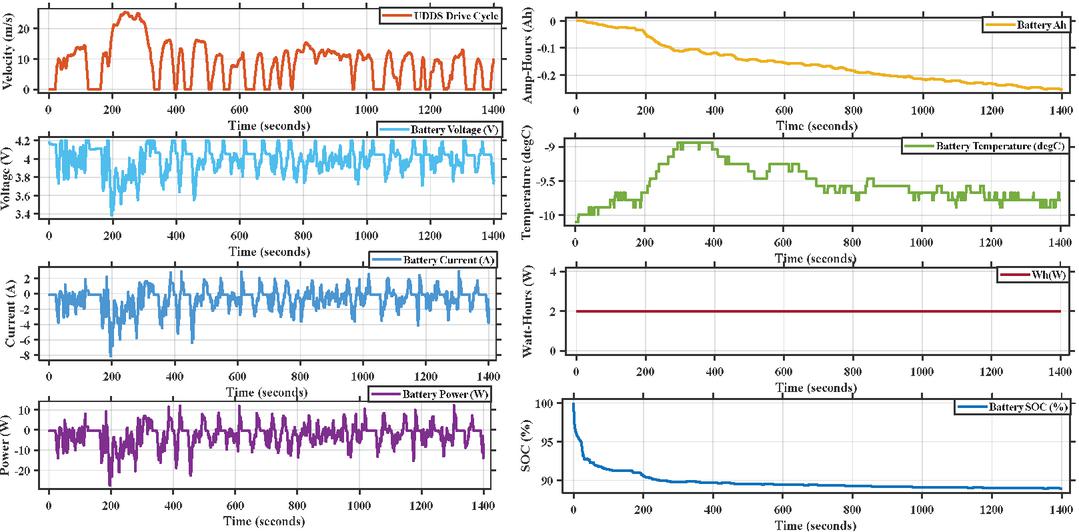
Figure 3(a): Battery characteristics for UDDS drive cycle at 10C.
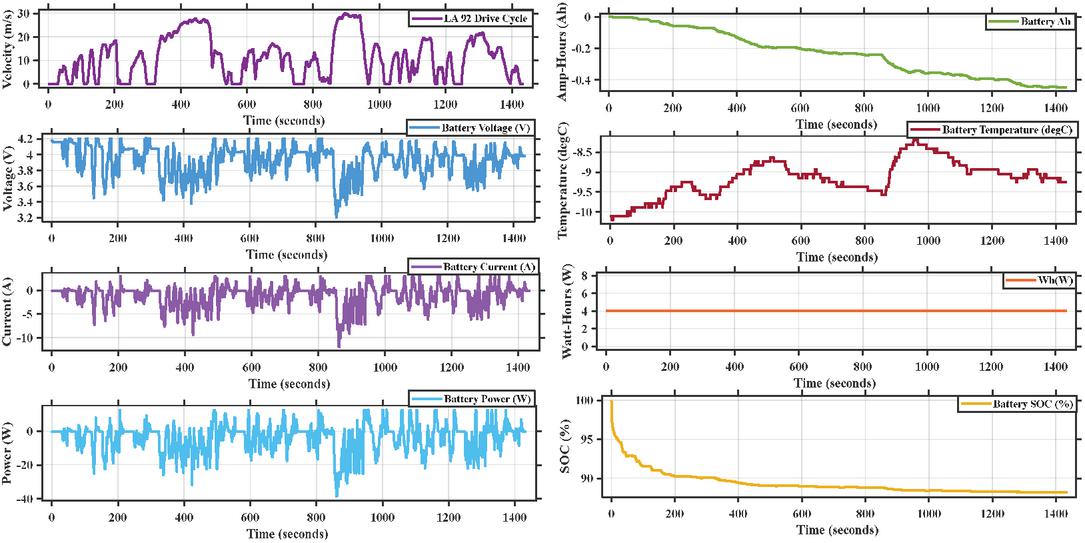
Figure 3(b): Battery characteristics for LA92 drive cycle at 10C.
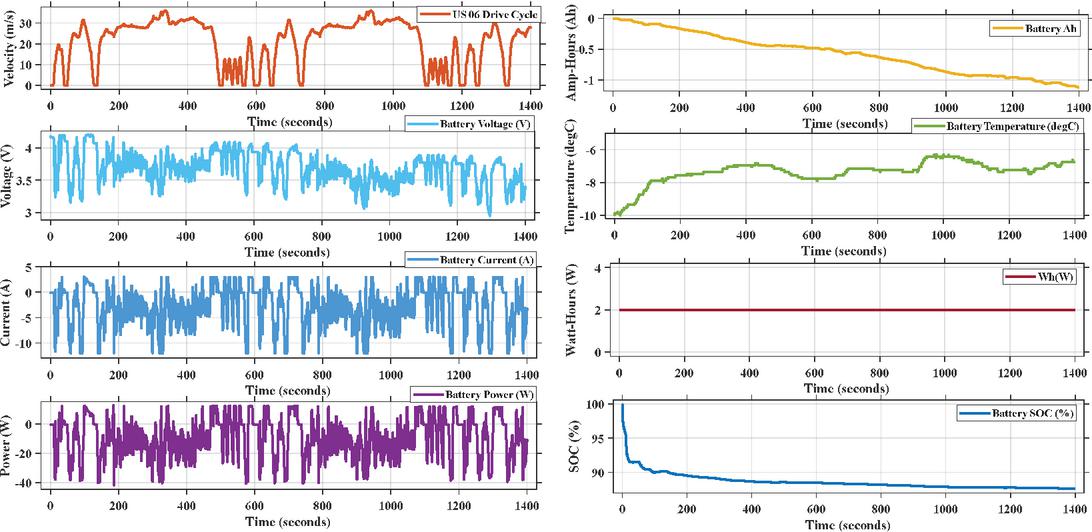
Figure 3(c): Battery characteristics for US06 drive cycle at 10C.
Because the majority of cold-weather countries have temperatures of 0C or less. So, to test the performance of the proposed algorithm at 0C. The battery voltage, current, power, amp-hour, temperature, watt-hour, and SOC for the UDDS, LA92, and US06 drive cycles at 0C as shown in Figure 4.
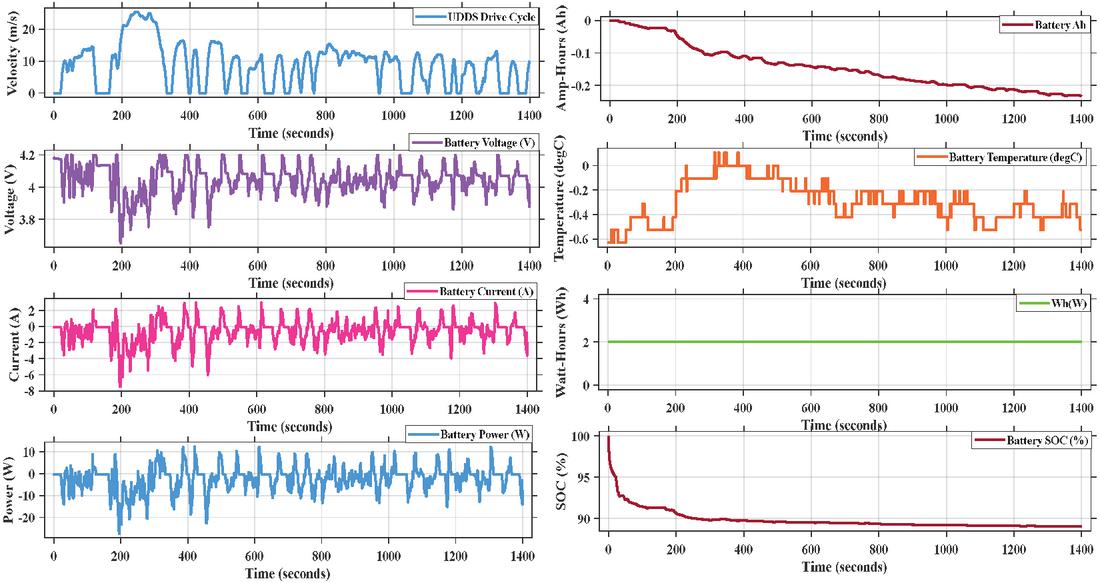
Figure 4(a): Battery characteristics for UDDS drive cycle at 0C.
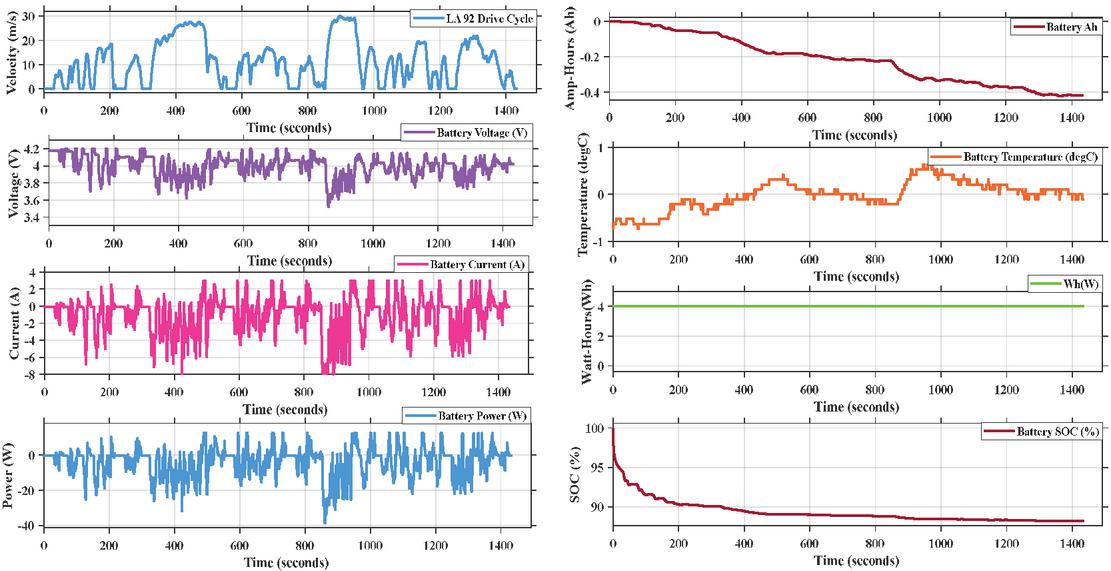
Figure 4(b): Battery characteristics for LA92 drive cycle at 0C.
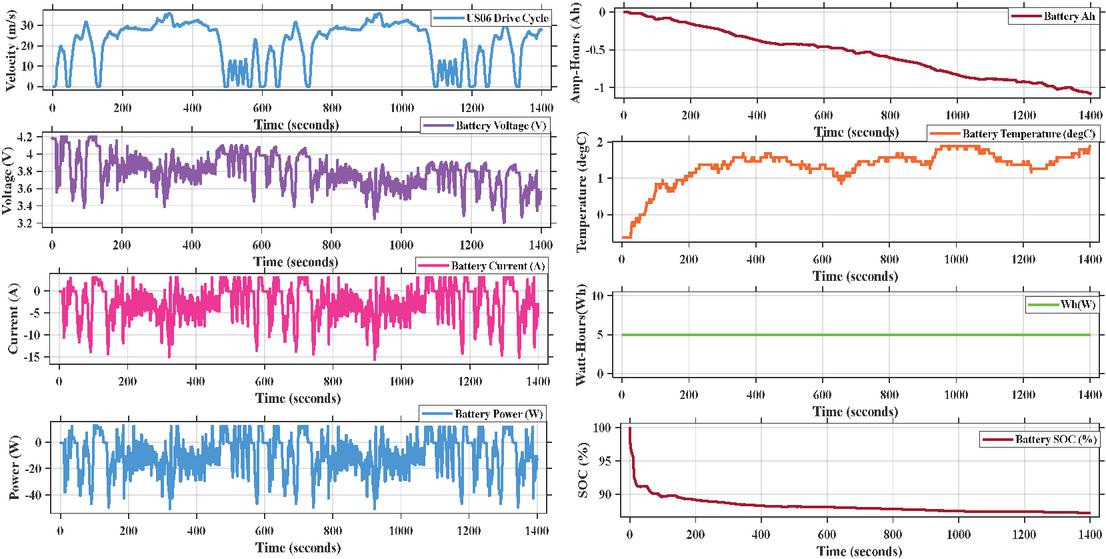
Figure 4(c): Battery characteristics for US06 drive cycle at 0C.
To test the battery’s performance at various temperatures and drive cycles, the battery voltage, current, power, amper-hour, temperature, watt-hour, and SOC are obtained in the third case at 10C and shown in Figure 5. It has been observed that as the ambient temperature rises, the power consumption and temperature variations in the battery varies.
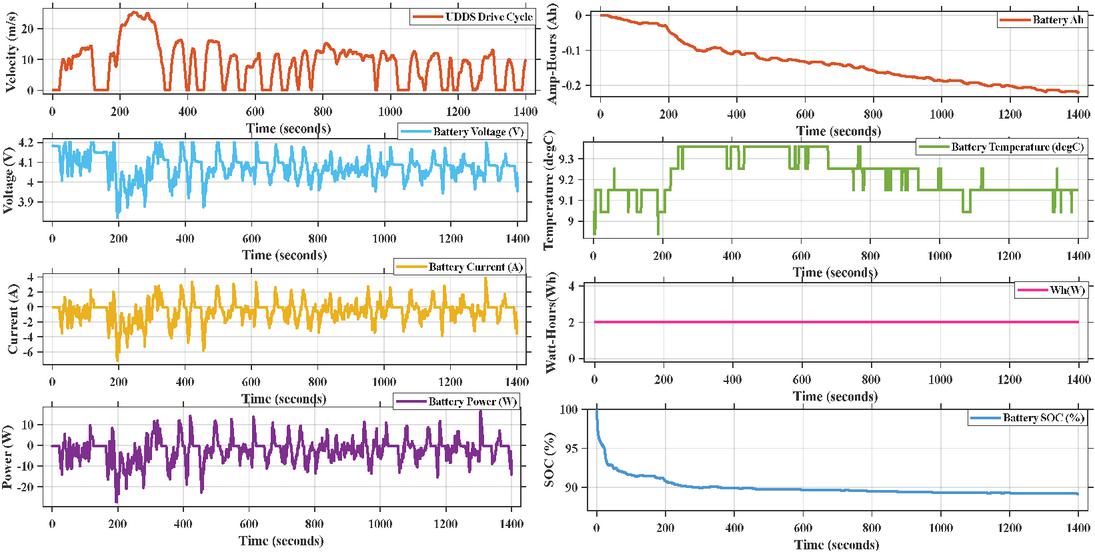
Figure 5(a): Battery characteristics for UDDS drive cycle at 10C.
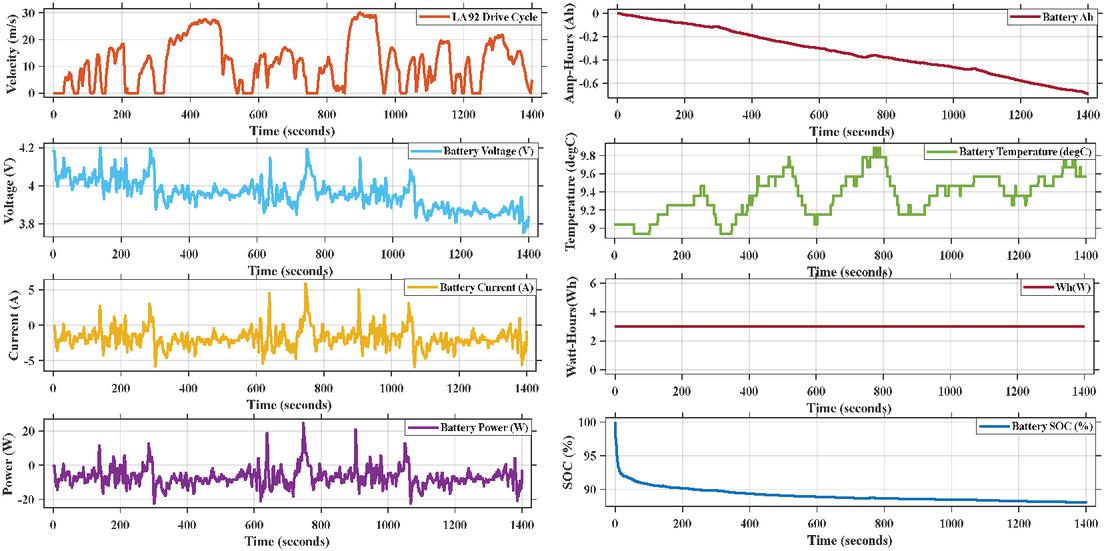
Figure 5(b): Battery characteristics for LA92 drive cycle at 10C.
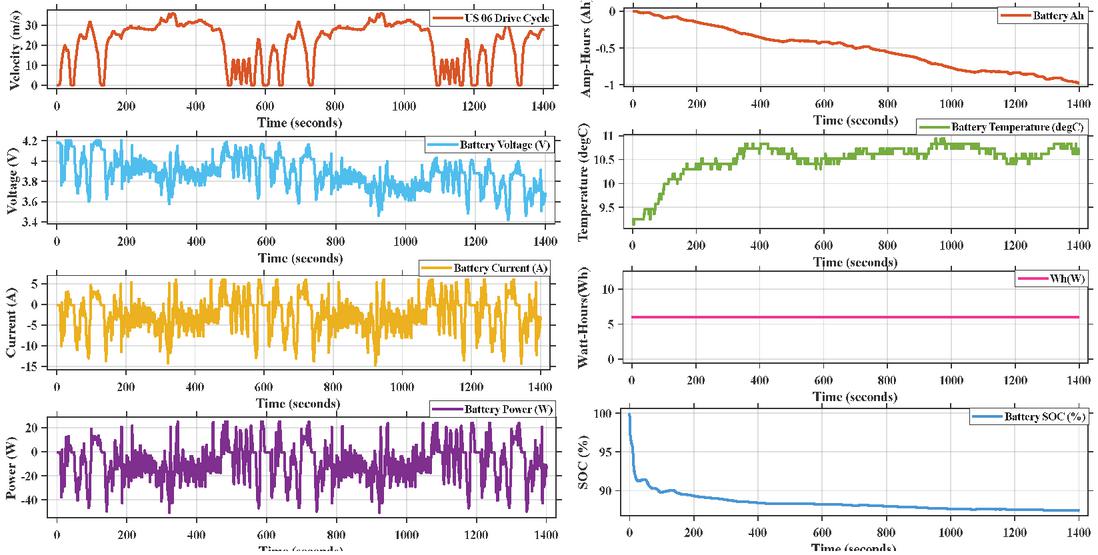
Figure 5(c): Battery characteristics for US06 drive cycle at 10C.
The ideal operating temperature for most li-ion batteries is 16–25C, where battery performance is maximum. So, to test the proposed algorithm’s battery performance in ideal temperature conditions, the battery voltage, current, power, amper-hour, temperature, watt-hour, and SOC and for UDDS, LA92, and US06 drive cycles are obtained at 25C as shown in Figure 6.
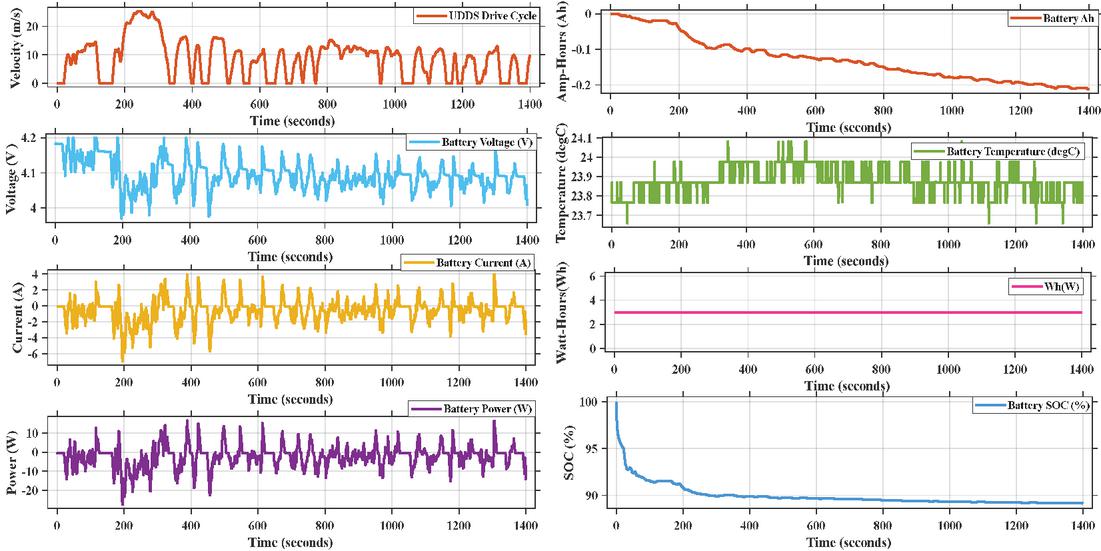
Figure 6(a): Battery characteristics for UDDS drive cycle at 25C.
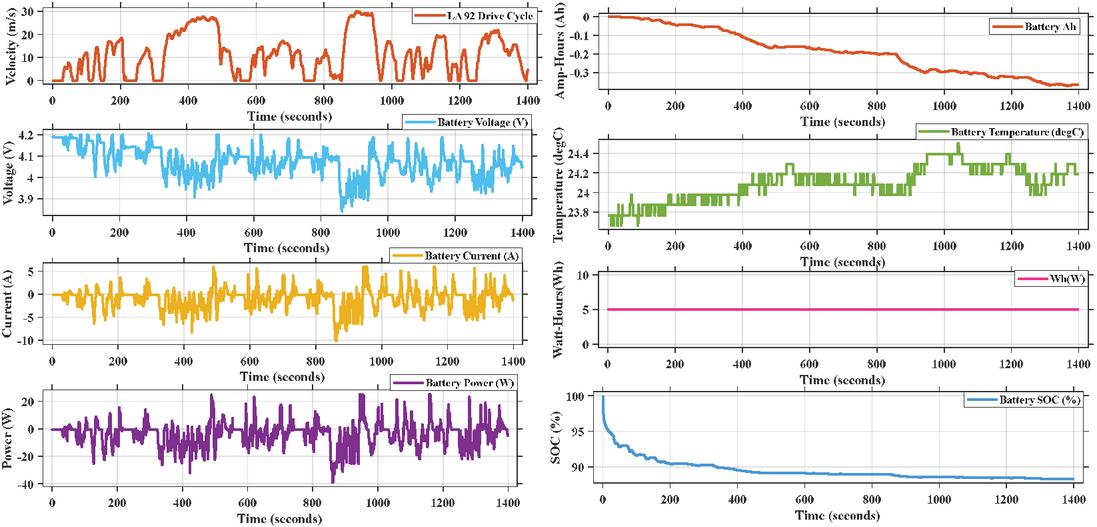
Figure 6(b): Battery characteristics for LA92 drive cycle at 25C.
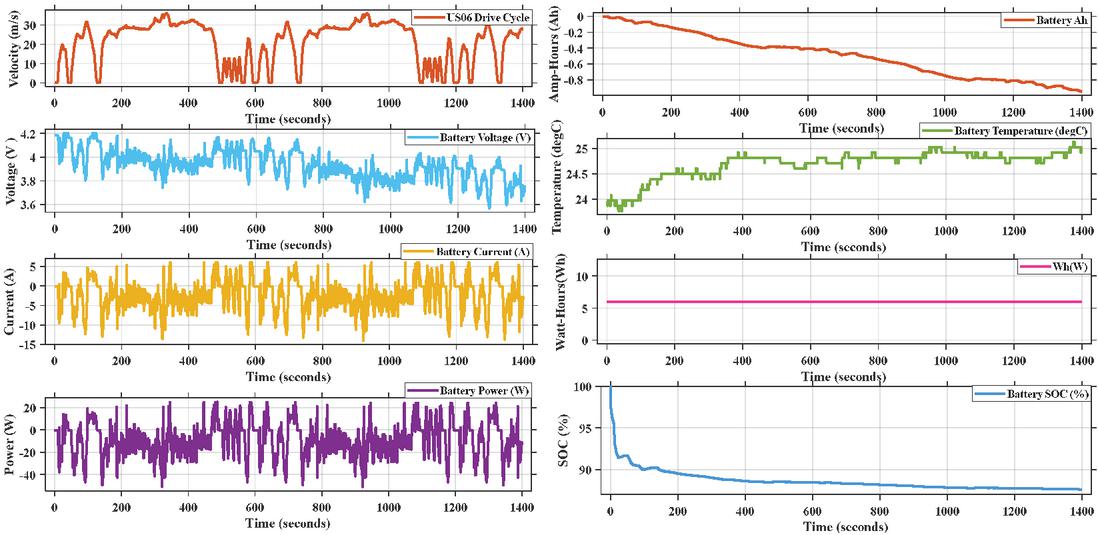
Figure 6(c): Battery characteristics for US06 drive cycle at 25C.
After collecting the battery dataset (V, I, T) for three drive cycles (UDDS, LA92, and US06) at 10C, 0C, 10C and 25C is combined and augmented to test the performance of the proposed algorithm, the detailed explanation of the proposed algorithm training, testing and validation is provided in Section 4.
Another critical step in data preparation is normalizing the dataset before feeding it to the network for training. Normalization enhances the model’s performance during training by eliminating scale distortion among variables in the training dataset. In practice, normalization can cut training time in half; because input values can be compared more easily and learnable variables can adapt more quickly during training [24]. Selection of asuitable data structure is also crucial step, when datasets require large memory. So, data repositories must be used to organize the datasets to feed the network effectively during the training process. The sequence below summarizes the primary processes used to prepare the datasets for training a DLFFNN to estimate battery SOC.
1. Get data from EV battery cells.
2. Find the errors and inconsistencies in datasets, and all datasets must be acquired at the same sampling rate
3. Separate the datasets for training and testing the model.
4. Normalize the data to increase the efficiency of the training process.
5. When the data is too large to fit in the available computer memory, use a data repository to improve the training process efficiency. Because the dataset in this study isn’t particularly large. A datastore structure, such as the MATLAB ’datastore’ function, was used in all cases to make the procedure more general.
In this paper, a novel DLFFNN SOC estimate strategy is proposed to construct a non-linear relationship between battery parameters and SOC. From the literature [3, 22, 24] any method for estimating EV battery SOC takes into account some assumptions. Such as voltage, current and temperature are essential but always not sufficient to estimate the accurate battery SOC with an acceptable level of MAE (1%). However, some essential adjustments, such as increasing the number of inputs parameters and adding more dataset pre-processing procedures, may increase overall complexity. We chose regression to solve the problem since the battery data variables, SOC, voltage, current, and temperature, have a time-dependent relationship.
In the DLFFNN approach V, I are used with a rolling window of 500 timesteps, with 1 second of the timestep, which may help the network to keep the estimated error value within the limit. These average values carry the previous timesteps information into present computations, which allows the network to evaluate past data. Other RNN approaches, such as LSTM, feature an internal gated structure that stores and selects which past and present input can be utilized to produce output.
3 Simulation Settings and Evolution Criteria
The proposed SOC estimation approach is realized using MATLAB/Simulink in Intel Core i9-7900X, NVIDIA TITAN Xp GPU at 3.30 GHz clock speed, and 128GB RAM. During the training phase, data from driving cycles, UDDS, US06, and LA92 is fed into the DLFFNN network to analyze the relationship among various battery parameters. The input layers receive the value X [V, I, T, V, I], where V, I, T, V, and I correspond to the actual voltage, current, temperature, average voltage and average current at time step k, The average voltage and current were calculated using 500 one-second time increments from the previous 500-time steps. The network produces estimated SOC as the output Y [SOC] for each time step k. The architecture of the DLFFNN is shown in Figure 1, consisting of 5 inputs, 2 hidden layers, and 50 neurons per hidden layer and 1 neuron in 1 output layer. The network is configured with the appropriate hyperparameters and an Adam optimizer is used to train it, resulting in a lower error proportion on actual and estimated SOC. Table 2 provides the hyperparameters of the DLFFNN that were initialized for the training and testing phase.
Table 2 Hyperparameters for DLFFNN training
| Hyperparameter | Initialized Values |
| Learning rate | 0.01 |
| Activation function | ReLU |
| Batch size | 10 |
| Learn rate drop period | 1000 |
| Learn rate drop factor | 0.1 |
| Number of neurons in input layer | 5 |
| Number of Epochs | 6000 |
| Optimizer | Adam |
| Number of neurons in the output layer | 1 |
| Number of hidden layers | 2 |
| Number of neurons in the hidden layer | 50 |
The effectiveness of the SOC estimation algorithm can be determined by the mean absolute error (MAE) as given in Equation (4), which gives the accuracy of the proposed SOC estimating model, while the RMSE validate the robustness as given in Equation (5). The maximum error (MAX) as given in Equation (6) represents the model response in the worst-case scenario.
| (4) |
| (5) |
| (6) |
Where n data point length, actual battery SOC, estimated SOC with time step k.
One of the most challenging tasks in the neural network approach is determining the number of neurons in the hidden layer to avoid data overfitting issues. To maintain consistency, the number of neurons in this proposed method is varied from 1 to 100 by using an “incremental for loop” algorithm and repeated 100 times with different configurations. The purpose of such variation and repetition was to account for the random weight and bias values before beginning DLFFNN training. These variations and repetitions generate random weight and bias values before beginning the training process and generating various local minima values. For each DLFFNN configuration, the error ranged by about a factor of two after 100 repetitions of training, which indicates that the initial values significantly impacted the training process.
Each battery parameter passes through the neural network during the training process, which is referred to as an epoch. The learning rate (LR) is used during backpropagation to adjust the gradient descent step size. This LR is crucial for parameter tuning because very low LR significantly slows down the training process, and high LR makes finding local minima difficult. To address this issue, a higher learning rate value is used at starting of the network training process, and gradually it is reduced over time to improve the training performance. It is achieved by specifying the number of epochs, the LR drop period, and the LR drop factor (for the proposed DLFFN provided in Table 2), where the LR drop factor is multiplied with LR after each iteration based on the LR drop period to update the LR for the next training iteration. As discussed in the previous section, more neurons increase complexity and consume more time for each iteration. In contrast, a less number of neurons decreases the system’s robustness and accuracy, and the final outcome is highly dependent on the initial training value.
With the proposed deep learning feed-forward neural network structure, the Li-ion battery cell SOC estimation results are shown in Figure 7. where all three drive cycle test data (UDDS from 0 to 15000 sec, LA92 from 25000 to 35000 sec and US06 from 43500 to 47750 sec) are along with 1C rating charging (15000 to 25000 sec and 35000 to 43500 sec) data after each drive cycle is added in data set to test the performance of the proposed algorithm.
The proposed DLFFNN consists of 5 inputs, 2 hidden layers with hyperbolic tangent function between them, and 1 output layer with a leaky rectified linear unit between the hidden and output layers, where negative values will be multiplied by 0.03, By using the leaky RELU layer, the maximum error of each discharge segment was significantly reduced at the end, and a clipped rectified linear unit with a ceiling-1 was used at the output layer. The results in Figure. 7 indicate that the proposed DLFFNN is accurately estimated the battery SOC with negligible error.
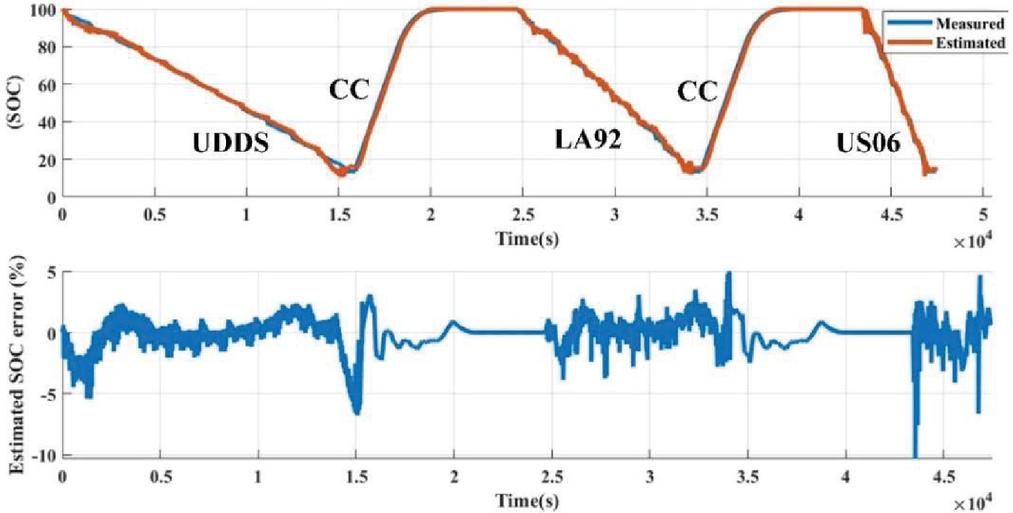
Figure 7 Proposed DLFFNN estimated SOC and error.
Because the proposed DLFFNN is a data-driven technique, the datasets used for training the network are crucial for improving its performance. However, the data required to train the network is not always available or is prohibitively expensive. Some artificial data has been generated and added to actual measured data; this process is known as data augmentation. These artificial data can be created in various ways. For example, a mathematical model, image classification, and so on. In EV battery SOC estimation, voltage, current, and temperature are measured data, which may have a significant measurement error since no measured data is 100% accurate. As a result, when designing the battery model, the neural network training dataset can be augmented with error data to improve network robustness if the expected error is known.
In this proposed data-driven method, the gain error (current of ) and offset error values (voltage 4 mV, current 110 mA and temperature C) are added to the corresponding data of the battery cell. Such as, if the cell voltage is 4.2 V after adding an offset error of 4 mV, the cell voltage becomes 4.196 V. Similarly, if the measured current is 2A after adding a 1% gain error, the cell current became 2.1A. The error values are comparable to those seen in an EV application.
Table 3 Augmented dataset
| Case | Volatge Offset | Current Offset | Temperature Offset | Current Gain Error |
| 1 | ||||
| 2 | 0 | 2% | ||
| 3 | 110 mA | 2% | ||
| 4 | 4 mV | 110 mA | 2% | |
| 5 | 4 mV | 110 mA | C | 2% |
| 6 | 2% | |||
| 7 | 110 mA | 2% | ||
| 8 | 4 mV | 110 mA | 2% | |
| 9 | 4 mV | 110 mA | C | 2% |
| 10 | 110 mA | 2% | ||
| 11 | 4 mV | 110 mA | 2% | |
| 12 | 4 mV | 110 mA | C | |
| 13 | 4 mV | 110 mA | C | |
| 14 | 4 mV | 110 mA | C | % |
Different augmented datasets cases are created to test the robustness of the proposed model, as given in Table 3. Here, the main objective is to keep the measured Ah data constant for SOC estimation. The difference between measured and estimated SOC is taken to calculate the model error.
4 Results and Discussion
The proposed data-driven based DLFFNN structure and configuration is shown in Figure 1, and the proposed DLFFNN was trained and tested for the Li-ion battery cell datasets at 25C with augmentation datasets provided in Table 3. The simulation results are shown in Figure 7, which indicates that, even after the sensor error data (augmented datasets) was added to the actual measured dataset, the proposed DNFFNN model can accurately estimate the SOC.
The DLFFNN trained with battery cell datasets at C and estimated Li-ion battery SOC is shown in Figure 8, and the errors, RMSE is 1.44%, MAE 0.98 %, and MAX 12.73% is achieved. It is observed that the MAE is below 1%. So, the proposed approach is robust and accurately estimated battery cell SOC.
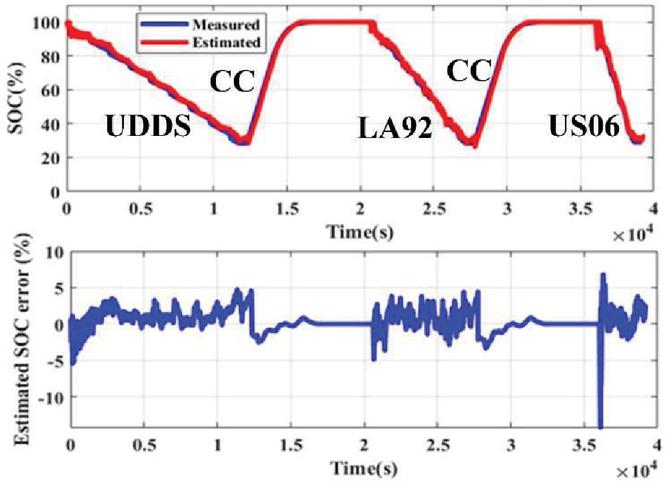
Figure 8 Proposed DLFFNN Estimated SOC and Error at C.
The proposed DLFFNN is trained with the same Li-ion battery cell datasets at 0C, and the estimated SOC of the Li-ion battery is shown in Figure 9 and the errors are RMSE 1.16%, MAE 0.89% and MAX 6% is achieved. It is also observed that the MAE is below 1%. So, the proposed approach is robust and accurately estimated the battery cell SOC.
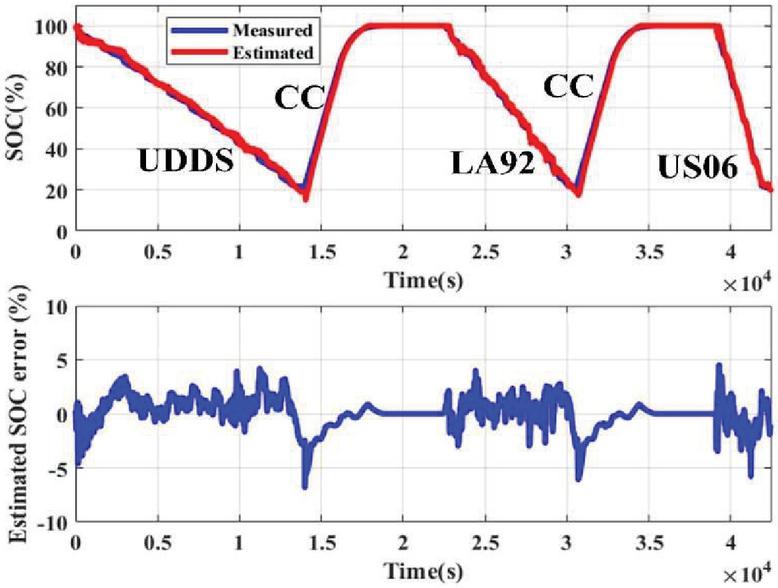
Figure 9 Proposed DLFFNN Estimated SOC and Error at C.
In the 3rd case, the proposed DLFFNN is trained with the same battery datasets at 10C and estimated SOC are shown in Figure 10, the errors, RMSE is 1.55%, MAE 0.91%, and MAX 6% is achieved. The estimated error graph is shown in Figure 9. In this case, it is observed that the MAE is below 1%. From the results, it can be concluded that the proposed method is quite accurate in the estimation of the SOC.
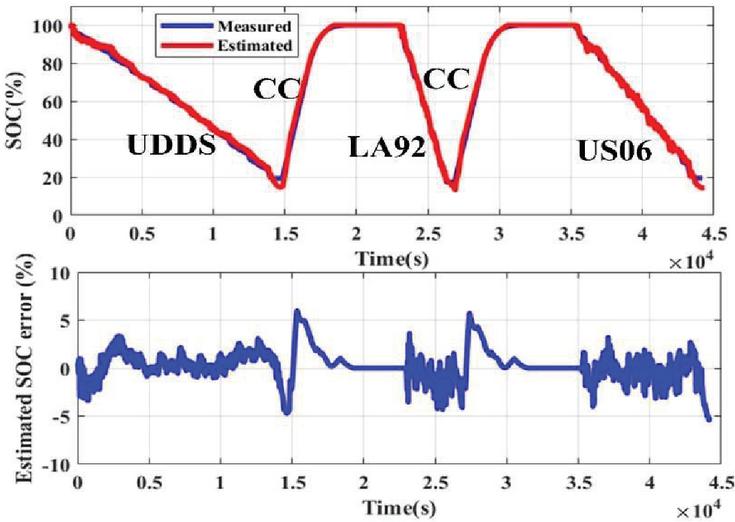
Figure 10 Proposed DLFFNN Estimated SOC and Error at C.
In the final test case, the DLFFNN is trained with the same battery datasets at 25C and estimated SOC given in Figure 11, and the error analysis is also presented from Figure 10, it is noted that the RMSE is 1.14%, MAE 0.66%, and MAX 6.65%. The SOC estimated error is also shown in Figure 10; it is observed that, at 25C, the proposed algorithm achieved the lowest MAE of 0.66%.
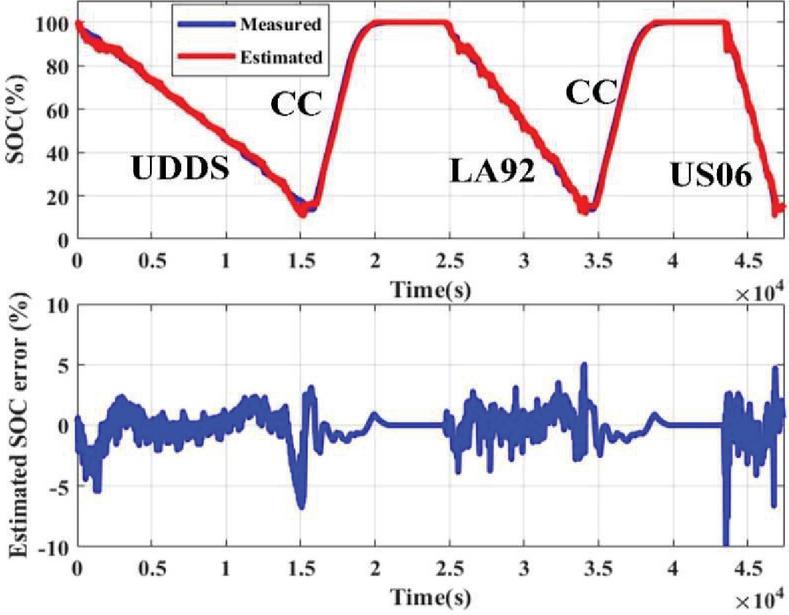
Figure 11 Proposed DLFFNN Estimated SOC and Error at C.
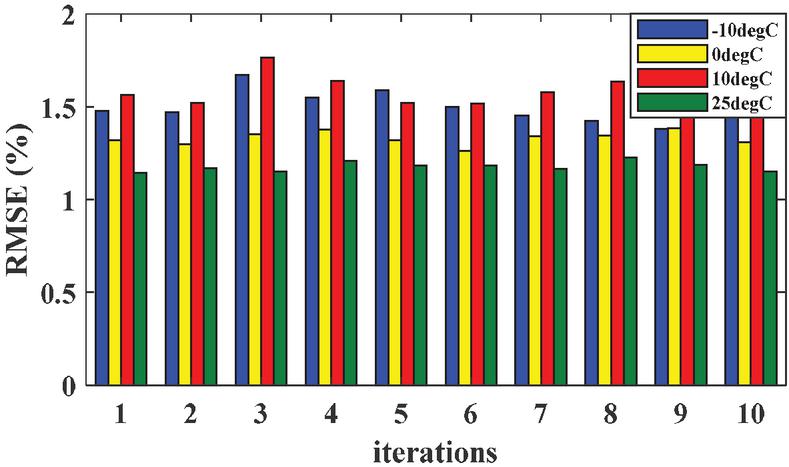
Figure 12 RMS error at different temperatures.
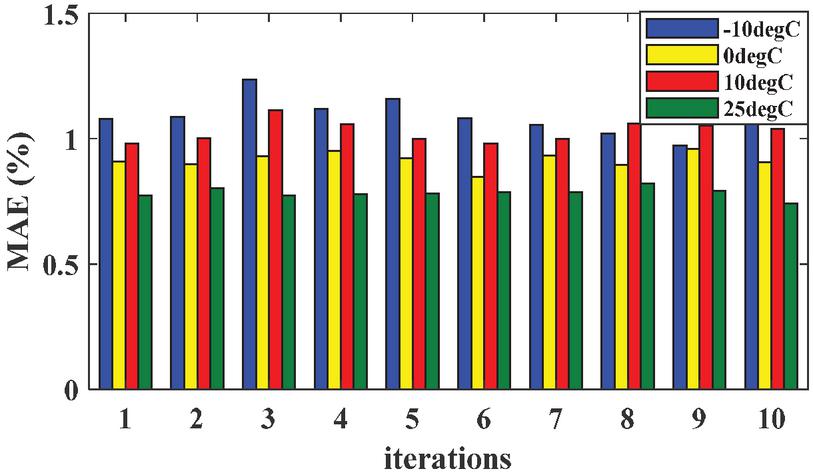
Figure 13 MAE error at different temperatures.
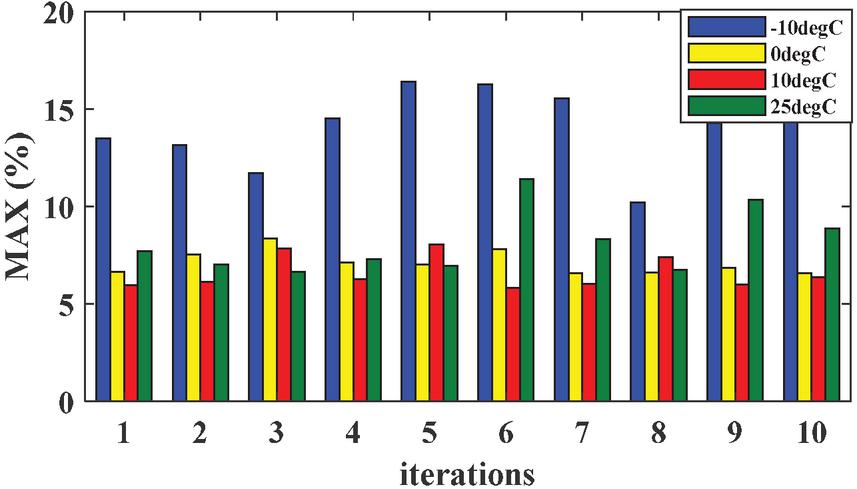
Figure 14 MAX error at different temperatures.
The RMSE, MAE, and MAX model errors for the DLFFNN trained with an error are approximately double that of the DLFFNN trained without error; because this augmented dataset creates uncertainty between model input and output parameters. This issue can be addressed by training the network more times, but it isn’t easy due to the large datasets, which take more than 10 hours. The proposed approach is tested at various ambient temperatures (from C to C). The obtained RMSE, MAE, and MAX percentage errors for the proposed network with 10 iterations are presented in Figures 12, 13, and 14. it is observed that the estimation errors vary with temperature and number of training iterations.
To prove the effectiveness of the proposed DLFFNN SOC estimation method is compared with other existing algorithms in the literature, a thorough comparison has been made by considering various parameters like error, ambient temperature, drive cycle as given in Table 4. From Table 4, it is evident that the proposed algorithm has a lower percentage of estimation error.
Table 4 Estimated error comparison with existing approaches
| Ambient | Test Case | |||||||
| Approach | % Error | Temperature | and Drive Cycle | |||||
| LSTM-CNN [23] |
|
|
|
|||||
| LSTM-RN [25] |
|
C, C,C |
|
|||||
| DNN [26] |
|
C, C,C |
|
|||||
| IndRNN [27] |
|
C, C,C |
|
|||||
| Proposed DLFFNN |
|
C, C,C, C |
|
5 Conclusion
For any estimation, the deep learning concept requires a large amount of data; in the case of battery SOC estimation, a large amount of battery datasets and several iterations are required. The proposed deep learning feed-forward neural network required less memory than other data-driven approaches, and unlike LSTM networks, an argument dataset was used to address the memory issue. To improve the robustness of the proposed feed-forward neural network, appropriated real-time automotive BMS error datasets were used to train the network, and the obtained results demonstrated that the proposed DLFFNN could accurately estimate the SOC of the battery even after adding an augmented dataset with actual measured datasets. The DLEFNN has certain flaws, such as the estimation error is dependent on ambient conditions, such as temperature and driving style, but these may be addressed by using augmented data during network training and by conducting additional training to find the optimal model. The results are demonstrated that the proposed DLFFNN is robust and accurately captured the non-linear correlations between network input and output parameters for battery SOC estimation with 0.66% MAE. The proposed model produced an accurate dynamic response of Li-ion battery SOC estimation at various operating conditions, and it is easily extended to account for additional factors such as battery aging, battery materials (different cell chemistries), and ambient conditions.
References
[1] X. Chen, W. Shen, M. Dai, Z. Cao, J. Jin, and A. Kapoor, “Robust adaptive sliding-mode observer using RBF neural network for lithium-ion battery state of charge estimation in electric vehicles,” IEEE Transactions on Vehicular Technology, vol. 65, no. 4, pp. 1936–1947, 2016, doi: 10.1109/TVT.2015.2427659.
[2] M. W. Cheng, Y. S. Lee, M. Liu, and C. C. Sun, “State-of-charge estimation with aging effect and correction for lithium-ion battery,” IET Electrical Systems in Transportation, vol. 5, no. 2, pp. 70–76, 2015, doi: 10.1049/iet-est.2013.0007.
[3] S. Li et al., “State-of-Charge Estimation of Lithium-Ion Batteries in the Battery Degradation Process Based on Recurrent Neural Network,” Energies, vol. 14, no. 2, p. 306, Jan. 2021, doi: 10.3390/en14020306.
[4] S. Singirikonda and Y. P. Obulesu, “Active cell voltage balancing of Electric vehicle batteries by using an optimized switched capacitor strategy,” Journal of Energy Storage, vol. 38, no. March 2020, p. 102521, Jun. 2021, doi: 10.1016/j.est.2021.102521.
[5] L. Zhang et al., “State-of-Charge Estimation of Lithium-Ion Battery Pack Based on Improved RBF Neural Networks,” Complexity, vol. 2020, pp. 1–10, Nov. 2020, doi: 10.1155/2020/8840240.
[6] Srinivas Singirikonda, Yeddula Pedda Obulesu,“Adaptive secondary loop liquid cooling with refrigerant cabin active thermal management system for electric vehicle,” Journal of Energy Storage, vol. 50, p. 104624, 2022, doi: 10.1016/j.est.2022.104624.
[7] S. Lee, J. Kim, J. Lee, and B. H. Cho, “State-of-charge and capacity estimation of lithium-ion battery using a new open-circuit voltage versus state-of-charge,” Journal of Power Sources, vol. 185, no. 2, pp. 1367–1373, 2008, doi: 10.1016/j.jpowsour.2008.08.103.
[8] K. Propp, D. J. Auger, A. Fotouhi, S. Longo, and V. Knap, “Kalman-variant estimators for state of charge in lithium-sulfur batteries,” Journal of Power Sources, vol. 343, pp. 254–267, 2017, doi: 10.1016/j.jpowsour.2016.12.087.
[9] W. Yan, B. Zhang, G. Zhao, S. Tang, G. Niu, and X. Wang, “A Battery Management System with a Lebesgue-Sampling-Based Extended Kalman Filter,” IEEE Transactions on Industrial Electronics, vol. 66, no. 4, pp. 3227–3236, 2019, doi: 10.1109/TIE.2018.2842782.
[10] J. Meng, G. Luo, and F. Gao, “Lithium polymer battery state-of-charge estimation based on adaptive unscented kalman filter and support vector machine,” IEEE Transactions on Power Electronics, vol. 31, no. 3, pp. 2226–2238, 2016, doi: 10.1109/TPEL.2015.2439578.
[11] C. Zewang, Y. Liwen, Z. Xiaobing, W. Youren, and H. Zhijia, “Online State of Charge Estimation of Li-ion Battery Based on an Improved Unscented Kalman Filter Approach,” Applied Mathematical Modelling, 2019, doi: 10.1016/j.apm.2019.01.031.
[12] X. Hu, F. Sun, and Y. Zou, “Estimation of state of charge of a Lithium-Ion battery pack for electric vehicles using an adaptive luenberger observer,” Energies, vol. 3, no. 9, pp. 1586–1603, 2010, doi: 10.3390/en3091586.
[13] Q. Ouyang, J. Chen, J. Zheng, and Y. Hong, “SOC Estimation-Based Quasi-Sliding Mode Control for Cell Balancing in Lithium-Ion Battery Packs,” IEEE Transactions on Industrial Electronics, vol. 65, no. 4, pp. 3427–3436, 2018, doi: 10.1109/TIE.2017.2750629.
[14] C. Chen, R. Xiong, and W. Shen, “A Lithium-Ion Battery-in-the-Loop Approach to Test and Validate Multiscale Dual H Infinity Filters for State-of-Charge and Capacity Estimation,” IEEE Transactions on Power Electronics, vol. 33, no. 1, pp. 332–342, 2018, doi: 10.1109/TPEL.2017.2670081.
[15] I. Baccouche, S. Jemmali, A. Mlayah, B. Manai, and N. E. ben Amara, “Implementation of an Improved Coulomb-Counting Algorithm Based on a Piecewise SOC-OCV Relationship for SOC Estimation of Li-Ion Battery,” International Journal of Renewable Energy Research, vol. 8, no. 1, pp. 178–187, 2018.
[16] M. Shehab El Din, A. A. Hussein, and M. F. Abdel-Hafez, “Improved battery SOC estimation accuracy using a modified UKF with an adaptive cell model under real EV operating conditions,” IEEE Transactions on Transportation Electrification, vol. 4, no. 2, pp. 408–417, 2018, doi: 10.1109/TTE.2018.2802043.
[17] Y. Ma, P. Duan, Y. Sun, and H. Chen, “Equalization of Lithium-Ion Battery Pack Based on Fuzzy Logic Control in Electric Vehicle,” IEEE Transactions on Industrial Electronics, vol. 65, no. 8, pp. 6762–6771, 2018, doi: 10.1109/TIE.2018.2795578.
[18] Y. Boujoudar, H. Elmoussaoui, and T. Lamhamdi, “Lithium-Ion batteries modeling and state of charge estimation using Artificial Neural Network,” International Journal of Electrical and Computer Engineering (IJECE), vol. 9, no. 5, p. 3415, Oct. 2019, doi: 10.11591/ijece.v9i5.pp3415-3422.
[19] J. Chen, Q. Ouyang, C. Xu, and H. Su, “Neural Network-Based State of Charge Observer Design for Lithium-Ion Batteries,” IEEE Transactions on Control Systems Technology, vol. 26, no. 1, pp. 313–320, 2018, doi: 10.1109/TCST.2017.2664726.
[20] F. K. Wang and T. Mamo, “A hybrid model based on support vector regression and differential evolution for remaining useful lifetime prediction of lithium-ion batteries,” Journal of Power Sources, vol. 401, no. July, pp. 49–54, 2018, doi: 10.1016/j.jpowsour.2018.08.073.
[21] Y. Li et al., “Random forest regression for online capacity estimation of lithium-ion batteries,” Applied Energy, vol. 232, no. February, pp. 197–210, 2018, doi: 10.1016/j.apenergy.2018.09.182.
[22] L. Ma, C. Hu, and F. Cheng, “State of Charge and State of Energy Estimation for Lithium-Ion Batteries Based on a Long Short-Term Memory Neural Network,” Journal of Energy Storage, vol. 37, no. March, p. 102440, May 2021, doi: 10.1016/j.est.2021.102440.
[23] X. Song, F. Yang, D. Wang, and K.-L. Tsui, “Combined CNN-LSTM Network for State-of-Charge Estimation of Lithium-Ion Batteries,” IEEE Access, vol. 7, pp. 88894–88902, 2019, doi: 10.1109/ACCESS.2019.2926517.
[24] G. Javid, D. Ould Abdeslam, and M. Basset, “Adaptive Online State of Charge Estimation of EVs Lithium-Ion Batteries with Deep Recurrent Neural Networks,” Energies, vol. 14, no. 3, p. 758, Feb. 2021, doi: 10.3390/en14030758.
[25] E. Chemali, P. J. Kollmeyer, M. Preindl, R. Ahmed, and A. Emadi, “Long Short-Term Memory Networks for Accurate State-of-Charge Estimation of Li-ion Batteries,” IEEE Transactions on Industrial Electronics, vol. 65, no. 8, pp. 6730–6739, Aug. 2018, doi: 10.1109/TIE.2017.2787586.
[26] D. N. T. How, M. A. Hannan, M. S. H. Lipu, K. S. M. Sahari, P. J. Ker, and K. M. Muttaqi, “State-of-Charge Estimation of Li-Ion Battery in Electric Vehicles: A Deep Neural Network Approach,” IEEE Transactions on Industry Applications, vol. 56, no. 5, pp. 5565–5574, Sep. 2020, doi: 10.1109/TIA.2020.3004294.
[27] P. Venugopal, V. T, and S. Reka S, “State of Charge Estimation of Lithium Batteries in Electric Vehicles Using IndRNN,” IETE Journal of Research, pp. 1–11, Apr. 2021, doi: 10.1080/03772063.2021.1906770.
Biographies

Srinivas Singirikonda received his B. Tech degree in Electrical Engineering from Jawaharlal Nehru Technological University, Hyderabad, Telangana, India and M. Tech degree in Control systems from Jawaharlal Nehru Technological University, Hyderabad, Telangana, India and Ph.D. degree from the School of Electrical Engineering, Vellore Institute of Technology, Vellore, Tamilnadu, India. His research interest includes Power converters, Electric Vehicles, Battery management systems, AI and ML techniques, EV Fast Charging, EV power train component design and Renewable energy source grid integration.

Yeddula Pedda Obulesu received his B.E degree in Electrical Engineering from Andhra University in 1995 and M.Tech degree in Machine drives and Power Electronics from Indian Institute of Technology, Kharagpur in 1998 and the Ph.D. degree from Jawaharlal Nehru Technological University, Andhra Pradesh, India in 2006. He is currently working as a professor in the School of Electrical Engineering, Vellore institute of technology, Vellore, Tamilnadu, India. His research interest includes Power converters, Electric Vehicles, Micro E-mobility Control of Electrical Drives, EV Fast Charging, Battery Management System, DC Microgrids, DC Distribution, Harmonic Mitigation & Power quality, AI & ML techniques.
Distributed Generation & Alternative Energy Journal, Vol. 38_3, 761–788.
doi: 10.13052/dgaej2156-3306.3833
© 2023 River Publishers