Stochastic Model Predictive Control Based on Polynomial Chaos Expansion With Application to Wind Energy Conversion Systems
Gang Liu* and Huiming Zhang
School of Control and Computer Engineering, North China Electric Power University, Changping 102206, Beijing, China
E-mail: 1510503148@qq.com
*Corresponding Author
Received 09 March 2024; Accepted 31 March 2024
Abstract
The wind energy conversion system (WECS) has a complex structure, and its state space model is highly nonlinear. Due to the random uncertainty of wind speed, it poses a huge challenge to achieve optimal control tasks and ensure the safe and stable operation of the system. Therefore, this article proposes a stochastic model predictive control strategy based on Polynomial Chaotic Expansion (PCE), which achieves the control tasks of MPPT and constant power regions in wind energy conversion systems. Firstly, a simple algorithm is proposed to obtain a set of basis functions that are suitable for the stochastic variable wind speed. Then, the obtained basis functions are used to propagate the uncertainty of the original uncertain differential equation of the wind energy conversion system through polynomial chaotic expansion. Combining the operating region and constraint conditions of the wind energy conversion system, the original stochastic uncertainty problem is transformed into a deterministic convex optimization problem. Using NREL 5MW wind turbine as the research object for simulation, the task of capturing maximum wind energy in MPPT area and tracking rated power points in constant power area was achieved. The experimental results show that the proposed control method can effectively improve the wind energy capture capability and achieve accurate tracking of output power to rated power.
Keywords: Wind energy conversion system, polynomial chaotic expansion, stochastic model predictive control.
1 Introduction
The transformation of energy from fossil fuels to renewable energy has become a global trend, and the main reasons for this transformation are twofold: firstly, environmental impact, as climate change has become increasingly evident in recent years; The second is the scarcity of fossil resources. Therefore, renewable energy sources such as wind energy, tidal energy, and solar energy [1] are increasingly receiving attention from scholars around the world [2]. Among them, wind energy has the highest utilization efficiency and relatively low production costs, making it a highly promising and efficient renewable energy source [3].
In recent years, there has been a significant increase in the development of wind energy conversion systems worldwide, posing new requirements for their control technology. In recent years, researchers from around the world have developed various advanced wind power control strategies, such as adaptive control [4], fuzzy control [5], model predictive control [6], and sliding mode variable structure control [7]. Model predictive control, as a model-based optimization control technique, achieves optimal overall closed-loop performance by repeatedly solving the Optimal control problem in the rolling time domain [8]. Due to its advantages of explicit constraint handling and multivariable coupling, it has been widely applied in the control research of wind energy conversion systems in recent years, especially in the control of wind power generation systems with multi-objective and multivariable constraints. Morsi et al. [9] used a linear parameter variation model to extract the rated power of wind turbines considering wind speed changes, in order to reduce mechanical loads and power fluctuations. By solving optimization problems under linear matrix inequality constraints, the optimal control input for each sampling time was calculated online. The control tasks of wind energy conversion systems vary in different operating areas. Xing et al. [10] designed an advanced model predictive control method that considers switch performance improvement, achieving continuous control in each area and effectively alleviating uncertain power fluctuations and mechanical loads during control mode switching. Gavgani et al. [11] introduced soft switching multi model predictive control technology, which achieved more captured energy, better maximum power point tracking quality, lower generator torque oscillation, and smoother output power curve.
Wind speed is influenced by environmental factors such as season and air pressure, therefore, the wind energy conversion system exhibits dynamic uncertainty. In response to this situation, Reddy et al. [12] used radial basis function network controllers to ensure better dynamic control. Benlahrache et al. [13] designed a Min max robust model predictive control (RMPC) strategy for wind power systems, which utilizes the boundary of wind speed uncertainty to ensure system stability while achieving the rated output power of the wind turbine under full load operation and reducing torque load. Lasheen et al. [14] adopted a tube based continuous time robust model predictive control to ensure the robustness of nonlinear wind power generation systems operating above rated wind speeds. However, robust model predictive control [15] only considers wind speed uncertainty as a bounded disturbance to the wind power generation system, ignoring the distribution information and variation rules of wind speed changes, resulting in excessive conservatism of the controller, which may lead to a decrease in accuracy in the wind power system control process [16].
Stochastic model predictive control (SMPC) can utilize the stochastic information of interference (including probability density function, mean, difference, high-order moment, etc.), set probability constraints, optimize expected performance indicators, and seek a compromise between control objectives and probability constraints to improve control effectiveness. Therefore, based on clarifying the stochastic characteristics of uncertainty in wind power generation systems, designing stochastic model predictive control can theoretically effectively improve the control efficiency of wind power systems and achieve system operation optimization with lower conservatism and stronger resistance to wind speed interference.
However, ensuring the feasibility of stochastic MPC is a major challenge, as the propagation of uncertainty in WECS dynamics is a challenge. Currently, Liu et al. [17] proposed a stochastic MPC strategy that combines probability tubes and robust tubes, taking into account the random uncertainty caused by wind speed. This strategy achieves low probability and high-precision tracking of output power exceeding the rated value. However, the above methods involve linearizing the WECS model and then processing the uncertainty, while WECS itself is highly nonlinear [18]. Andrea et al. [19] proposed a novel stochastic model predictive control algorithm framework based on polynomial chaotic expansion, which provides us with new ideas to solve the multiplication uncertainty in WECS. Wind speed has a high degree of randomness, and we can propagate uncertainty based on its random information [20].
Based on the above analysis, this paper proposes a PCE based stochastic model predictive control strategy for WECS, and conducts simulation on the NREL 5MW wind turbine as the research object. To achieve control tasks in various operating areas of WECS using PCE based stochastic model predictive control, the following two points should be considered: (1) to construct an effective control strategy to avoid non convex optimization problems caused by the strong nonlinearity of WECS; (2) Wind speed has strong randomness and is influenced by many environmental factors. A reliable optimization program should be developed to ensure that the proposed control strategy enables WECS to operate safely and stably in all operating areas.
The main contribution of this article is to apply a stochastic model predictive control strategy based on polynomial chaotic expansion to the operation and control of wind energy conversion systems, taking into account the strong nonlinearity of the wind energy conversion system model and the strong randomness caused by wind speed, and obtaining better control effects through simulation.
Therefore, the first section models the wind energy conversion system and obtains a nonlinear state space model of the wind energy conversion system. Then, in the second section, we established a stochastic model predictive control strategy based on polynomial chaotic expansion. The third section provides a detailed introduction to the implementation of a stochastic model predictive control method based on polynomial chaotic expansion in wind energy conversion systems. In the fourth section, a summary of the work done in this article is provided, as well as prospects for future work.
2 Wind Energy Conversion System Model
To establish a mathematical model for the Wind Energy Conversion System (WECS), the system is divided into four subsystems. The inputs of WECS are wind speed , pitch angle setting value , and generator torque setting value , while the outputs of the system are generator power and generator speed . The WECS architecture diagram is shown in the following figure [21]:
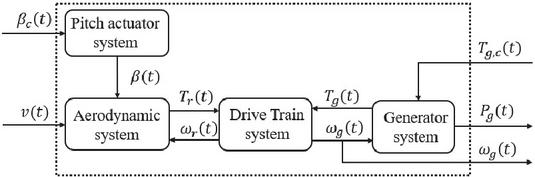
Figure 1 Schematic diagram of wind energy conversion system structure.
2.1 Pitch Actuator System Model
The variable pitch control system can be represented by a second-order model, and its state equation is:
| (1) |
where is the actual value of the pitch angle, representing the control amount of the pitch angle.
The pitch angle is constrained by the following:
| (2) | ||
| (3) |
where and represent the minimum and maximum values of the pitch angle, and represent the minimum and maximum values of the pitch angle change rate, respectively.
2.2 Aerodynamic System Model
The wind turbine blades can only convert a portion of wind energy into mechanical energy. According to relevant physical principles, the output power of the wind turbine can be obtained:
| (4) |
The aerodynamic torque of a wind turbine is:
| (5) |
where, as can be seen from formula (5), assuming that , and remain constant, is only determined by the size of , and is the radius of the wind turbine impeller, is the wind energy utilization coefficient, which is a function of the pitch angle and blade tip velocity ratio . is another important parameter of wind turbines, which is the ratio of the linear velocity at the tip of the wind turbine blades to the wind speed, i.e.
| (6) |
where is the rotor speed of the wind turbine. The wind energy utilization coefficient describes the energy extraction efficiency of wind turbines, modeled as:
| (7) |
where is represented as:
2.3 Drive Train System Model
The transmission chain is the main device for transmitting wind energy, consisting of low-speed shafts, high-speed shafts, gears, and elastic devices. The dynamic equation of the transmission chain is as follows:
| (8) |
where and represent the moment of inertia of the low-speed shaft and the high-speed shaft, respectively. is the stiffness coefficient of the elastic device of the transmission chain, is the damping coefficient of the elastic device of the transmission chain, is the gear ratio, and is the shaft torsion of the flexible transmission chain.
2.4 Generator and Converter Models
As a whole, the wind turbine and converter models can be replaced by first-order models, namely the electromagnetic subsystem:
| (9) |
where is the rated torque of the generator. and represent the minimum and maximum torque rated of the generator, respectively.
The power generated by the generator can be described as:
| (10) | ||
| (11) |
where is the rated torque of the generator. and represent the minimum and maximum torque rated of the generator, respectively.
The power generated by the generator can be described as:
| (12) |
where is the power conversion efficiency.
The power should meet the following constraints:
| (13) |
where is the rated output power.
2.5 Stochastic Model of Wind Energy Conversion System
Summarize the above equations and present them in a more general nonlinear state space form, defined as follows:
| (14) |
where , , . The detailed expansion formula of the nonlinear model of the wind energy conversion system can be found (15)–(16).
| (15) | |
| (16) |
3 SMPC Control Strategy Based on PCE
The main control task of the MPPT area is to track the optimal power coefficient curve by controlling the wind turbine speed to capture the maximum wind energy, while the speed tracks the wind speed change by adjusting the generator torque to maximize the utilization of wind energy, that is, to maintain the blade tip speed ratio at the optimal value. At this point, the wind energy utilization coefficient reaches its maximum value. The main control task of the constant power region is to stabilize the output power at the rated value, adjust the wind turbine according to the constant power output, and maintain the output power of the generator at the rated power by adjusting the pitch angle. Based on the nonlinear state space model (14) of the wind energy conversion system, a stochastic model predictive controller is established for the MPPT region and the constant power region using the idea of polynomial chaotic expansion.
3.1 Selection of Basis Functions
Due to the influence of seasons, temperature, pressure, and solar radiation, wind speed has strong randomness, and the distribution of wind speed is extremely irregular and non-Gaussian distribution. Therefore, the basis function cannot be directly obtained from conventional distributions. We use the probability density function of wind speed to construct our unique set of basis functions .
Meanwhile, the basis function must satisfy:
| (17) |
where represents the Kronecker function, if , ; Otherwise, it is 0; defines the inner product:
| (18) |
where is the PDF of the stochastic variable .
The construction of the basis function set makes them mutually orthogonal to any PDF. Starting from any basis, the Gram Schmidt orthogonalization method can be used to construct basis functions that are orthogonal to a given inner product. A common starting basis is a set of unary polynomials .
According to the Gram Schmid method, constructing any chaotic polynomial basis function [22] is:
| (19) |
where the coefficient is defined as:
| (20) |
3.2 The Uncertainty Propagation of Stochastic Differential Equations
In Equation (14), the system dynamics equation is stochastic, and we can consider it as a stochastic process. Our task is to use PCE to quantify stochastic dynamics equations into deterministic dynamics equations. Due to the presence of uncertainty, the system state and control input are random at every moment. Therefore, this article assumes that the state and control of the system are both stochastic.
Polynomial Chaos Expansion (PCE) quantifies the uncertainty of the predicted output by propagating parameter uncertainty through a model. Polynomial chaotic expansion provides a method of approximation using convergent expansion, and the PCE expansion models for state variables and control variables are:
| (21) | ||
| (22) |
where and are expansion coefficients, and is the m-th polynomial chaotic basis function with respect to the stochastic variable .
Due to practical reasons, the PCE in (21) and (22) must be truncated to a finite number of terms. The total number of terms in truncated expansion depends on the number of uncertain parameters and the preservation of the highest order polynomial basis function in the expansion
| (23) | ||
| (24) |
The orthogonality of multivariate polynomials can effectively calculate the PDF statistic of . For example, the first and second center moments of :
| (25) |
Due to the highly complex nonlinear model of wind energy conversion system and the high randomness of wind speed, in this paper, we will choose the non-invasive polynomial chaotic expansion method based on least squares estimation [23]. Set M stochastic variable samples, then, execute the original model solver at each sample point to collect the corresponding target response . The determination of PCE coefficients involves the minimization of residual norm.
| (26) |
There are
| (27) |
Therefore, the least squares solution of Equation (27) is:
| (28) |
By substituting PCE models (23)–(24) into the stochastic dynamic equation in Equation (14), it is easy to obtain:
| (29) |
For the convenience of subsequent derivation, the following symbols have been defined for the coefficients appearing in Equations (23)–(24):
| (30) | ||
| (31) |
Therefore, Equation (30) can be further written in a compact form as follows:
| (32) |
3.3 Objective Function
MPC relies on solving a constrained finite level optimal control problem in a backward horizontal pattern at each time step. Especially, at each time step, only the first element of the obtained optimal input sequence is used as the control action. In the next time step, repeat the process and move the optimization window forward one step.
When the model parameter vector is known, the optimal input sequence can be obtained in a deterministic manner by solving the constrained optimal control problem on the horizon . The uncertainty of model parameters can be considered by explicitly considering the parameter vector as a random variable.
Our goal is to adopt a stochastic control scheme, where the control objective of SMPC is to determine an optimal input sequence that maximizes the system output to the desired reference trajectory while satisfying both input and output constraints. We have appropriately designed the SMPC cost function to penalize the difference between the expected output value and the given reference point.
We consider the cost function as follows:
| (33) |
Where is the expectation for the parameter vector v, whose term is modeled as a stochastic variable. The vectors and correspond to the permanent fixed points that MPC needs to reach after the transient state. Matrices and are design parameters, where and .
Optimization control problem (33): Based on the inconsistent control tasks of the wind energy conversion system in the MPPT region and constant power region, and the different weight coefficients taken, the following optimization problems are obtained for each.
In the MPPT area, the main control objective is to maximize power conversion efficiency, and the secondary control objective is to reduce additional power fluctuations. Therefore, the optimization problem in the MPPT region is expressed as:
| (34) |
In the constant power region, the main control objective is to maintain the fan output power within the rated value and reduce the fatigue damage of the fan. Therefore, the optimization problem in the constant power region is expressed as:
| (35) |
4 Simulation Analysis
As mentioned earlier, wind energy conversion systems have different control objectives when operating in the MPPT area and constant power area. Therefore, in order to verify the effectiveness and superiority of the SMPC control algorithm based on PCE proposed in this article, simulation simulations will be conducted on the system in the MPPT region and the constant power region, respectively.
Simulate a 5MW wind energy conversion system, where the parameter values in system (15) are shown in Table 1. Set control time domain and sampling period . The number of random variables based on polynomial chaotic expansion proposed in this chapter is , the highest order of the expansion is , and the number of terms is .
Table 1 Wind energy conversion system model parameters
| Nomenclature | Symbol | Unit | Value |
| rated output power | 5 | ||
| rotor cut-in angular velocity | 0.7226 | ||
| rotor rated angular velocity | 1.2671 | ||
| generator rated angular velocity | 122.9096 | ||
| rated shaft torsion | 0 | ||
| cut-in wind speed | 3 | ||
| rated wind speed | 11.2 | ||
| cut-off wind speed | 25 | ||
| maximum blade pitch | 90 | ||
| minimum blade pitch | 0 | ||
| generator rated torque | 43093.55 | ||
| maximum blade pitch rate | 8 | ||
| minimum blade pitch rate | 8 | ||
| maximum generator torque rated | 15000 | ||
| minimum generator torque rated | 15000 | ||
| shaft stiffness coefficient | 867636000 | ||
| Damping coefficient | 6215000 | ||
| inertia of the generator | 534.116 | ||
| inertia of the rotor and the shaft | 38768000 | ||
| Rotor radius | 63 | ||
| Torque actuator time constant | 0.1 | ||
| pitch angle actuator natural frequency | 0.88 | ||
| sample time | 0.0125 | ||
| damping constant of pitch angle actuator | 0.1 | ||
| generator efficiency | 94.4 | ||
| gear ratio | 97 |
Traditional nonlinear model predictive control has significant advantages in handling nonlinear systems, improving robustness, handling constraint conditions, and implementation and optimization. Therefore, this article designs a comparative simulation between traditional nonlinear model predictive control and stochastic model predictive control based on polynomial chaos expansion, analyzes the response results of wind energy conversion system output power, pitch angle, generator torque, wind turbine rotor speed, etc., in order to better illustrate the efficiency and superiority of the stochastic model predictive control strategy based on polynomial chaos expansion proposed in this article. However, traditional nonlinear model predictive control can only handle bounded uncertainty disturbances and cannot handle disturbances with random information. Therefore, the solution strategy of nonlinear model predictive control is different from the stochastic model predictive control method based on polynomial chaos expansion designed in this paper. In order to obtain more fair comparison results, the same deterministic constraints, control time domain, and sampling interval are set in both traditional nonlinear model predictive control and the stochastic model predictive control method based on polynomial chaotic expansion proposed in this paper.
This section simulates the mechanism model (14) of the wind energy conversion system and analyzes the control effects achieved by the system in the MPPT and constant power regions under the influence of traditional nonlinear model predictive control and stochastic model predictive control methods based on polynomial chaos expansion.
4.1 MPPT Regional Simulation Verification
The main task in the MPPT area is to adjust the speed of the wind turbine according to the changes in wind speed, control the blade tip speed ratio to the optimal value at the moment, and enable the wind turbine to achieve maximum power tracking. This area is fixed pitch variable speed control, and the speed of the wind turbine is regulated. The blade tip speed ratio is required to be maintained at the optimal blade tip speed ratio, with an optimal power coefficient of 0.48 and an optimal blade tip speed ratio of 8.1. The pitch angle is always maintained at 0. The simulation experiment in the MPPT area is shown in the following figure. The red solid line and blue solid line in the simulation results respectively describe the experimental results under SMPC and NMPC control.
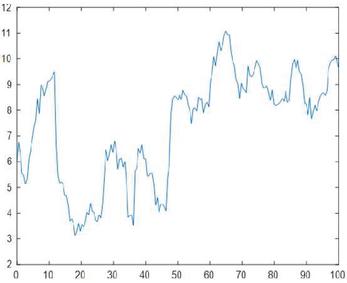
Figure 2 Wind speed distribution map in MPPT region.
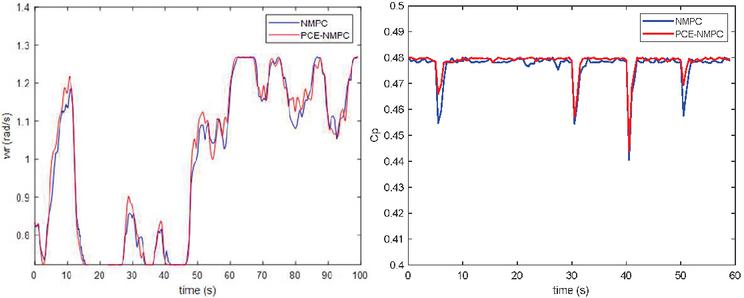
Figure 3 Wind turbine rotor speed and wind energy utilization coefficient.
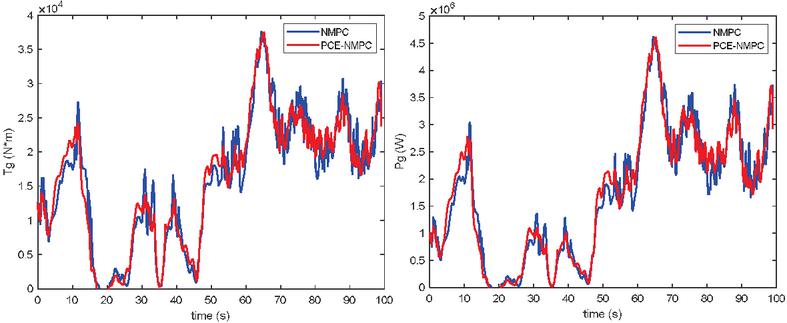
Figure 4 Generator torque and output power.
Table 2 Comparison of simulation results between SMPC and NMPC in MPPT region
| Index | SMPC | NMPC |
| (ITAE) | 122.38 | 153.15 |
| (mean) | 1.7161 | 1.6853 |
| (mean) | 0.4773 | 0.4768 |
From the above simulation comparison experiment and the data in the above simulation comparison experiment chart and table, it can be concluded that the control effect of the PCE based SMPC method proposed in this paper is significantly better than that of traditional NMPC control, and the tracking effect is also significantly better than that of traditional NMPC control. At the same time, the power captured by this method is 1.8% higher than that of traditional NMPC control, and its mean is also higher than that of traditional NMPC control. This means that the PCE based SMPC method proposed in this article can achieve better maximum power tracking quality and more aerodynamic power capture. By comparing the data in the figure and table, it can be seen that the control effect of the PCE based SMPC method proposed in this paper is significantly better than that of traditional NMPC control, and the tracking effect is also significantly better than that of traditional NMPC control. At the same time, the power captured by this method is increased by 1.8% compared to traditional NMPC control, and the mean value of this method is also higher than that of traditional NMPC control, This means that the PCE based SMPC method proposed in this article can achieve better maximum power tracking quality and more aerodynamic power capture.
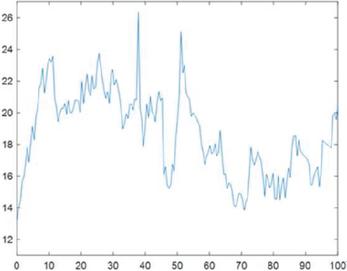
Figure 5 Wind speed distribution in the constant power region.
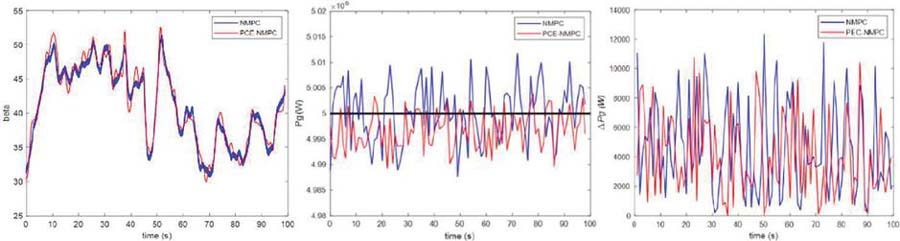
Figure 6 Actual value of pitch angle, actual value of output power and Deviation of output power.
Table 3 Comparison of simulation results between SMPC and NMPC in constant power region
| Index | SMPC | NMPC |
| (ITAE) | 0.1855 | 0.2474 |
| (mean) | 4.9967 | 5.0202 |
| (standard deviation) | 0.0531 | 0.827 |
| (Maximum deviation value) | 0.1075 | 0.1237 |
4.2 Constant Power Region Simulation Verification
The main control objective of the constant power zone is to maintain the output power of the wind turbine within the rated value and reduce the fatigue damage of the wind turbine. This area is pitch control, where the wind turbine rotor speed, generator rotor speed, and generator torque all reach their rated values. The simulation experiment in the constant power region is shown in the following figure. Similarly, the red solid line and blue solid line in the simulation results respectively describe the experimental results under SMPC and NMPC control.
From Figure 14, it can be seen that the PCE based SMPC control method proposed in this chapter significantly improves the rated output power control compared to traditional NMPC control. Compared with the rated power of 5MW, the maximum deviation of output power under traditional NMPC control is 0.1237 MW, while the maximum deviation of output power under PCE based SMPC control is 0.1075 MW, a decrease of 13.1%, and a significant improvement in the effect; After calculation and analysis, the average power values under PCE based SMPC control and traditional NMPC control are 4.9967 MW and 5.0202 MW, respectively, with standard deviations of 0.0531 MW and 0.0827 MW. The average output power values and standard deviations under PCE based SMPC control are reduced by 0.49% and 35.79%, respectively. Therefore, in the constant power region, the PCE based SMPC control method proposed in this paper has a more significant effect on suppressing the impact of random interference on the system output power.
5 Conclusion
To improve the ability of wind energy conversion systems to cope with wind energy random disturbances, this paper proposes a stochastic model predictive control strategy based on polynomial chaotic expansion. This strategy utilizes polynomial chaotic expansion to propagate uncertainty, transforming the original stochastic uncertainty problem into a deterministic convex optimization problem. Simulation is conducted in the operating area of the wind energy conversion system, and compared and analyzed with the standard nonlinear model predictive control method. The main conclusions can be summarized as follows:
(1) By using polynomial chaotic expansion to propagate the uncertainty of the system, stochastic problems can be transformed into convex optimization problems, which can be applied to the control of wind power. This can simplify the complex stochastic control problem of wind energy conversion systems. Meanwhile, this algorithm can ensure that the MPC optimization problem is iteratively feasible, and the closed-loop system is asymptotically stable at any stage.
(2) The PCE based SMPC control strategy designed in this article can effectively solve the uncertainty problem of wind energy conversion systems, has strong tracking ability, and effectively improves the wind energy capture ability of wind energy conversion systems.
(3) The SMPC control strategy based on PCE designed in this article can quickly stabilize the power generation near the rated value, reduce the fluctuation range of power, and effectively suppress the interference of random disturbances.
The PCE based SMPC control strategy proposed in this article has achieved good results in the control of a single wind turbine. Compared with traditional nonlinear MPC methods, it has significant advantages in both wind energy capture capability and suppressing power random fluctuations. In recent years, the domestic wind power industry has experienced explosive growth, mainly developing large-scale wind farms. It is necessary to achieve control over wind farm clusters. Future research will focus on the control of wind farm clusters, and the PCE based SMPC strategy combined with distributed control ideas proposed in this article will be applied to the control of wind farm clusters.
References
[1] Jian jie, C., Bo, Z., Fang, Z., Juan, H., and Li, Z.(2024). ldentification of High and Low Voltage Ride Through Control Parameters for Electromechanical Transient Modeling of Photovoltaic Inverter. Distributed Generation &Amp; Alternative Energy Journal, 39(02), 195–220.
[2] Abdelateef Mostafa M, El-Hay E A, ELkholy M M. Recent Trends in Wind Energy Conversion System with Grid Integration Based on Soft Computing Methods: Comprehensive Review, Comparisons and Insights[J]. Archives of Computational Methods in Engineering, 2023, 30(3): 1439–1478.
[3] Sang LQ, Li Qa, Cai C, Maeda T, Kamada Y, Wang X, et al. Wind tunnel and numerical study of a floating offshore wind turbine based on the cyclic pitch control. Renew Energy, 2021, 172:453–64.
[4] Huang C, Zhuang J. Error-based active disturbance rejection control for pitch control of wind turbine by improved coyote optimization algorithm[J]. IEEE Transactions on Energy Conversion, 2021, 37(2): 1394–1405.
[5] Thao N G M, Uchida K, Kofuji K, et al. An automatic-tuning scheme based on fuzzy logic for active power filter in wind farms[J]. IEEE Transactions on Control Systems Technology, 2018, 27(4): 1694–1702.
[6] Cui J, Liu X, Chai T. Approximate Scenario-based Economic Model Predictive Control with Application to Wind Energy Conversion System[J]. IEEE Transactions on Industrial Informatics, 2022.
[7] Hiremath, R., and Moger, T (2023). Improving the DC-Link Voltage of DFlG Driven Wind System Using Modified Sliding Mode Control. Distributed Generation &Amp; Alterative Energy Journal, 38(03): 715–742.
[8] Tirumalasetti, M. B., Manthati, U. B., Srinivas, P., and Arunkumar, C.R. (2022). A Novel Predictive Control Scheme for Interleaved Buck Converter in Low Power Applications. Distributed Generation & Alterative Energy Journal, 37(3), 609–630.
[9] Morsi A, Abbas H S, Mohamed A M. Wind turbine control based on a modified model predictive control scheme for linear parameter-varying systems[J]. IET Control Theory & Applications, 2017, 11(17): 3056–3068.
[10] Xing X, Meng H, Xie L, et al. Switching performance improvement based on model-predictive control for wind turbine covering the whole wind speed range[J]. IEEE Transactions on Sustainable Energy, 2018, 10(1): 290–300.
[11] B. M. Gavgani, A. Farnam, J. D. M. D. Kooning and G. Crevecoeur. Efficiency Enhancements of Wind Energy Conversion Systems Using Soft Switching Multiple Model Predictive Control. IEEE Transactions on Energy Conversion, 2022, 37(2): 1187–1199.
[12] Reddy D, Ramasamy S. Design of RBFN controller based boost type Vienna rectifier for grid-tied wind energy conversion system[J]. IEEE Access, 2018, 6: 3167–3175.
[13] Benlahrache M A, Laib K, Othman S, et al. Fault tolerant control of wind turbine using robust model predictive min-max approach[J]. IFAC-PapersOnLine, 2017, 50(1): 9902–9907.
[14] Lasheen A., Saad M. S., Emara H. M., et al. Continuous-time tube-based explicit model predictive control for collective pitching of wind turbines[J]. Energy, 2017, 118: 1222–1233.
[15] Evans M A, Cannon M, Kouvaritakis B. Robust MPC tower damping for variable speed wind turbines[J]. IEEE Transactions on Control Systems Technology, 2014, 23(1): 290–296.
[16] Dai L, Xia Y, Gao Y, et al. Distributed stochastic MPC of linear systems with additive uncertainty and coupled probabilistic constraints[J]. IEEE Transactions on Automatic Control, 2016, 62(7): 3474–3481.
[17] Liu X, Feng L, Kong X, et al. Tube-based stochastic model predictive control with application to wind energy conversion system[J]. IEEE Transactions on Control Systems Technology, 2023.
[18] Cortes-Vega D, Ornelas-Tellez F, Anzurez-Marin J. Nonlinear optimal control for PMSG-based wind energy conversion systems[J]. IEEE Latin America Transactions, 2021, 19(7): 1191–1198.
[19] Andrea Pozzi, Davide M. Raimondo. Stochastic model predictive control for optimal charging of electric vehicles battery packs. Journal of Energy Storage, 2022, 55: 105332.
[20] Pepper N, Montomoli F, Sharma S. Multiscale uncertainty quantification with arbitrary polynomial chaos[J]. Computer Methods in Applied Mechanics and Engineering, 2019, 357: 112571.
[21] Soliman M, Malik O P, Westwick D T. Multiple model predictive control for wind turbines with doubly fed induction generators[J]. IEEE Transactions on Sustainable Energy, 2011, 2(3): 215–225.
[22] Paulson J A, Mesbah A. An efficient method for stochastic optimal control with joint chance constraints for nonlinear systems[J]. International Journal of Robust and Nonlinear Control, 2019, 29(15): 5017–5037.
[23] Wan H P, Ren W X, Todd M D. Arbitrary polynomial chaos expansion method for uncertainty quantification and global sensitivity analysis in structural dynamics[J]. Mechanical systems and signal processing, 2020, 142: 106732.
Biographies

Gang Liu (1999), male, master’s student, with research interests in wind turbine optimization control, wind farm modeling and optimization control, and stochastic model predictive control.

Huiming Zhang (1999), male, master’s student, research direction: modeling and optimization control of photovoltaic power generation units, stochastic model predictive control.
Distributed Generation & Alternative Energy Journal, Vol. 39_3, 613–634.
doi: 10.13052/dgaej2156-3306.39310
© 2024 River Publishers