Photovoltaic Maximum Power Point Tracking Technology Based on Power Prediction Algorithm Combined with Variable Step Length Disturbance Observation Method
Zhiwei Xu1, 2,*, Bin Wang1, Kexian Xiang1, Xianguo Li1 and Wantai Liu
1School of Electrical and Information Engineering, Hunan Institute of Engineering, Xiangtan, 411104, China
2Hunan Provincial Key Laboratory of Wind Turbines and Control, No. 88, Fuxing East Road, Xiangtan City, 411104, China
E-mail: xzw@hnie.edu.cn
*Corresponding Author
Received 22 May 2024; Accepted 22 July 2024
Abstract
Under partial shading conditions, the system operating sequence of photovoltaic cells does not fall on a single characteristic curve, and the traditional maximum power point tracking (MPPT) control algorithm is prone to causing the system output power to oscillate around the maximum power point. In the case of multiple peaks, the traditional MPPT algorithm is prone to being trapped in a local optimum solution. This paper proposes an MPPT control algorithm based on the WOA-RF prediction algorithm combined with a variable step disturbance observation method. By establishing a photovoltaic system simulation model, the improved algorithm is verified through simulation. The improved MPPT control algorithm can adaptively adjust the step size under different conditions to ensure that the system can quickly and accurately track the maximum power point. At the same time, by optimizing the algorithm logic and parameter settings, it can effectively avoid problems such as local optimum solutions and instability in the system, and improve the system convergence speed and tracking accuracy.
Keywords: Photovoltaic cells, maximum power tracking technology, predictive algorithm, photovoltaic system.
1 Introduction
Photovoltaic (PV) power generation, as an important part of the new power system, is a clean and renewable energy technology, which has received widespread attention and application. However, in practical applications, the efficiency and stability of photovoltaic (PV) systems can be influenced by various factors, including changes in light intensity, temperature fluctuations, and the presence of shadows. To fully leverage the energy conversion potential of the PV system and enhance the system’s efficiency and stability, researchers have put forth diverse optimization control approaches [1–4].
Regarding the PV maximum power point tracking control algorithms, traditional methods such as P&O and PSO are limited under PV multi-peak state conditions; e.g., these methods are prone to fall into the problems of local optimal solutions, instability, poor performance, and difficulty in regulation under shading conditions [5].
In practice, photovoltaic systems in the multi-peak conditions of the traditional algorithms are difficult to meet the requirements, easy to get stuck in local optima. The following literature proposes methods to solve the problems that exist in traditional algorithms; [6] proposes an MPPT control algorithm based on the improved conductance increment method, which corrects the step size variation by introducing current-related coefficients to minimize the impact of current variation on the output characteristics of PV cells. Although the algorithm can improve the efficiency of the PV power generation system to a certain extent, it is not solved for the multi-peak problem, and tracking the maximum power point (MPP) effectively becomes difficult if the changes in light intensity are too complicated. The concept of a variable step-size speed factor is introduced in reference [7], which enhancement involves incorporating a variable step-size speed factor into the traditional fixed-step-size perturbation observation method algorithm. The goal of this improvement is to enhance the performance of the algorithm. In a photovoltaic power generation system’s tracking algorithm, the step size is usually adjusted depending on the proximity of the PV array’s operating point to the MPP. Typically, a larger tracking step size is employed when the operating point is significantly distant from the maximum power point. Conversely, when the operating point is close to the maximum power point, the step size tends to be smaller, and it may even approach zero. This step size adjustment helps improve the tracking accuracy and efficiency of the PV system by adapting to different operating conditions; Indeed, adjusting the step size based on the operating point’s proximity to the maximum power point can effectively address the trade-off between dynamic performance and steady-state tracking accuracy in the traditional fixed-step-length perturbation observation method. However, this approach may not fully address the issue of the tracking speed of the system. Additional techniques or methods may be required to optimize the tracking speed while maintaining the desired dynamic performance and tracking accuracy. The quantum CS-P&O algorithm utilized in the [8] is an improvement of the cuckoo algorithm, and its main idea is to update the direction of the particles by introducing quantum operations; through this idea, this paper introduces the animal population intelligence algorithm and applies it to the MPPT of the PV system. This is done by incorporating the intelligent prediction algorithm with the variable-step-size perturbation observation method. The goal is to overcome the drawbacks of traditional maximum power tracking methods, such as slow response speed and a tendency to be trapped in local optimization. By utilizing the animal population intelligence algorithm, the proposed approach aims to address these issues and improve the performance of the PV system’s MPPT [9, 10]. The objective of this research is to enhance the power generation efficiency and stability of the photovoltaic power generation system through PV optimized random forest regression predictive control and maximum power tracking control. Specifically, this paper will design and implement a PV power generation system prediction model based on random forest regression and combine it with the maximum power tracking control algorithm to realize the optimal control of the system. The effectiveness of the proposed method is evaluated through experimental simulation verification.
2 Mathematical Modeling of Photovoltaic Cells
The main part of a photovoltaic cell is the PN junction, which produces a photogenerated current under light conditions , which can be equated to a photovoltaic cell as a constant-current output source. The photovoltaic cell can be compared to an output source that provides a constant current [11]. The photogenerated current will be partially shunted by the parasitic diode effect of the PN junction and the equivalent shunt resistance . The following figure depicts the equivalent circuit structure model of a photovoltaic cell at a given point in time. In this model, the resistor represents the external load of the PV cell, while represents the series resistance.
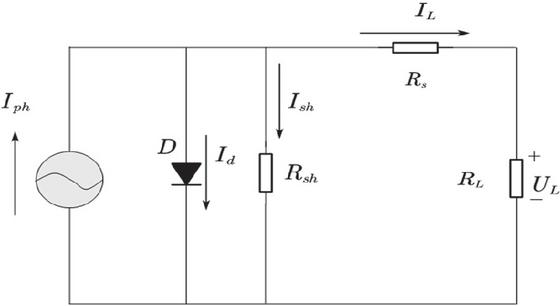
Figure 1 Equivalent circuit of photovoltaic cell.
where is the diode current, This refers to the net diffusion current that flows in the opposite direction to the photogenerated current across the PN junction, and its expression is:
| (1) |
Where refers to the saturation current of the PV cell when there is no incident light. is the constant factor (usually taken as 12), is Boltzmann’s constant, is the temperature, and is the charge of the electrons . According to the mathematical model in Figure 1 above the load current can be obtained .
| (2) |
where is the self-contained internal resistance of the PV cell, and is the side leakage resistance, which is mainly caused by the internal defects of the cell.
In the open circuit test, the infinity, the open circuit voltage can be measured at . Based on the mathematical model, it can be calculated at .
| (3) |
It is commonly noted that the open circuit voltage is proportional to the logarithm of irradiance and has a relationship with the irradiance level. Thus, it can be seen that light intensity as well as temperature are important parameters in determining the output characteristics of PV cells.
Considering the actual situation of photovoltaic cell power generation, the light intensity may be more significantly affected by localized shadow conditions such as cloud shading [12, 13]. The simulation is carried out to investigate the impact on the output power of PV cells under different lighting effects. Simulations can be conducted to explore the impact of varying levels of light on the output power of PV cells, through the software simulation; input different irradiance, observe the PV characteristics and IV characteristics curve, can be compared to get the corresponding output impact.
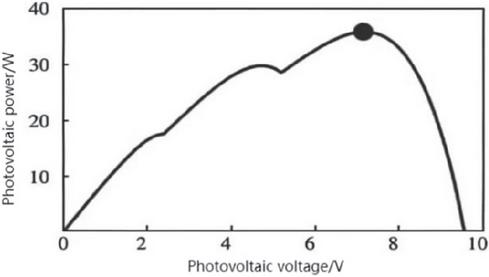
Figure 2 Tri-peak PV curve generated by PV cell.
Figure 2 shows the case of constant temperature, change irradiance, simulated photovoltaic cells in a short period of time irradiance measured voltage and current volt-ampere characteristic curve as well as the power output characteristic curve. From Figure 2 above, it can be seen that if the irradiance received by the PV cell changes, the PV cell may have multiple extreme points [14]. The maximum power tracking technique is employed to monitor and adjust the power output of the PV cell. In the traditional approach to maximum power tracking, the voltage or current is modified in order to track the maximum power output point, assuming a constant irradiance. Once the irradiance changes suddenly, the traditional early maximum power tracking method cannot immediately track the real-time maximum power point, and the direction of optimization may be misjudged.
3 Whale Optimization Algorithm
The Whale Optimization Algorithm (WOA) is an optimization method inspired by the behavior of whale populations in nature [15]. By observing the behavior of whales and simulating the process of whales searching for food in the ocean, solutions to optimization problems can be found. The foraging process of whales in the ocean can be divided into three steps: encircling prey, spiral bubble hunting, and searching for prey.
3.1 Surrounding Prey
In the whale optimization algorithm’s “encirclement of prey” process, all whales approach the target prey (i.e., the optimal solution) until one whale is able to encircle it.
| (4) | |
| (5) |
where denotes the current distance vector from the whale to the optimal solution, is the current iteration number, denotes the current position vector of the optimal solution, is the current position vector of the solution. and are parameter vectors, which are determined by Equations (6) and (7).
| (6) | |
| (7) |
Where and are random numbers in [0,1]; is the parameter that decreases linearly from 2 to 0 in the iterative search, and the mathematical expression of is:
| (8) |
Where: represents the current iteration number while represents the maximum iteration number.
3.2 Spiral Bubble Hunting
The Whale hunting behavior is usually divided into two behaviors: rotating forward to capture prey and contracting to round up prey. Assuming that the probability of being selected for each of the two behaviors, rotating forward and contracting roundup, is 50%, then the update position formula is as follows:
| (9) |
Where is a random number in [0,1]; is a constant used to describe the shape of the spiral, here value is taken as 1; is the distance between each whale and the current best whale position, which is calculated by the following formula:
| (10) |
From Equation (6), the value of ranges from , and the value of determines whether the search mechanism is performed or not, and when is used, the whale attacks the target prey using Equation (10) as a strategy.
3.3 Searching for Prey
When , whales conduct a search for prey. Its search formula is as follows:
| (11) |
where denotes the random whale position vector.
4 Random Forest Regression Prediction (RF)
The random forest regression algorithm is a machine learning technique that utilizes multiple decision tree models together to perform regression analysis. It is an ensemble learning method that harnesses the individual strengths of decision trees to enhance the accuracy of predictions in regression tasks, and achieves the effect of reducing overfitting by random sampling and subset sampling of the input features, thus improving the performance and stability of the model. In this paper, we propose to combine Random Forest regression with the WOA algorithm for the prediction of PV (MPPT) control strategy.
Assume that there are sample data, each with eigenvalues. Randomly divide the data into copies and use each copy to train different decision tree models. For each decision tree model features are randomly selected for training; . Then is trained and a prediction function is obtained, where denotes the feature data. We combine these decision tree models to obtain the final prediction function formula.
| (12) |
From this formula, the final prediction is obtained by averaging the predictions of each decision tree.
The training process of the decision tree: sampling data sequentially from data points; this sampling process can be with or without putback. At the same time, features are randomly selected from features for training the decision tree.
After training all the decision trees, predictions can be made using the random forest regression algorithm. For a new data point , if it is entered into each decision tree, predictions are obtained.
5 WOA-RF PV Power Prediction
5.1 Data Acquisition and Preprocessing
The photovoltaic output data used in this study was collected from a solar laboratory at a university in Hunan Province in June 2020. The data covers a period of two days and includes both cloudy and sunny weather conditions.
There are six main indicators collected in this data collection. Among them, the actual voltage output from the PV cell after the maximum power tracking is used as the output dependent variable of the prediction model, and the data of the other five indicators (total radiation, direct radiation, scattered radiation, temperature, and humidity) are used as the argument for the input of the prediction model.
After dividing the dataset into a training set and test set, the objective function for WOA optimization is determined by finding the minimum error under cross-validation in the training set. Using the whale optimization algorithm, the optimal combination of parameters is obtained by solving the objective function, and it is applied to the random forest regression model to get the optimal prediction results.
In order to ensure that the simulation can select the better parameters and get good prediction results, the simulation data set totaled 443 sets of data, which were predicted in two working conditions. In order to eliminate the abnormal data and invalid data, as well as to make the simulation output image can be observed and compared more efficiently, the quartile method is used to clean the data. [18–21]. A total of 73 groups of abnormal data were removed, and the valid data totaled 185 groups, of which the first 148 groups were used as the training set data for the model, and the training set was the real-time power generation record data selected for a duration of 4 days. The last 37 sets of data are used as test data to detect and visualize the prediction results of the model.
| (13) |
Where, represents the fitness value required for the calculation. In this context, represents the total number of samples in the training set, while represents the -th sample in the training set. denotes as predicted output value and actual output value.
5.2 Establishment of WOA-RF Optimization Model
Random forest can effectively avoid the problem of overfitting, and at the same time has a high prediction accuracy. One approach to combining these two algorithms is to utilize the Whale Optimization Algorithm during the construction process of the random forest to optimize the parameters of the decision trees or search for the best feature subset. This can help improve the performance and accuracy of the random forest.
Before the model building process, Data preprocessing is necessary and involves steps such as data cleaning, feature extraction, feature selection and other steps, to get a random regression forest prediction model with high accuracy. Using the whale optimization algorithm, the decision tree parameters of the model are optimized in the following steps.
1. train a regression forest model. During training, the optimal solution obtained by the whale optimization algorithm is used to set the number of decision trees.
2. For each decision tree, the model generates a new randomized sub-training set from the original training set using randomized put-back sampling.
3. In each decision tree, the model divides the feature space into regions according to predefined rules (square error, squared error) and fits a function that can be used for regression in each region.
4. When a prediction is needed, the regression forest inputs the samples to be predicted into each decision tree and generates predicted values based on the region in which the samples are located and the regression function within that region. Finally, the regression forest synthesizes the final prediction results by averaging the predictions from each decision tree.
5.3 Predictive Modeling
In this paper, the WOA algorithm is utilized to regressively predict the voltage corresponding to the maximum output power point of the PV array. The flow chart of the WOA-RF algorithm is as follows:
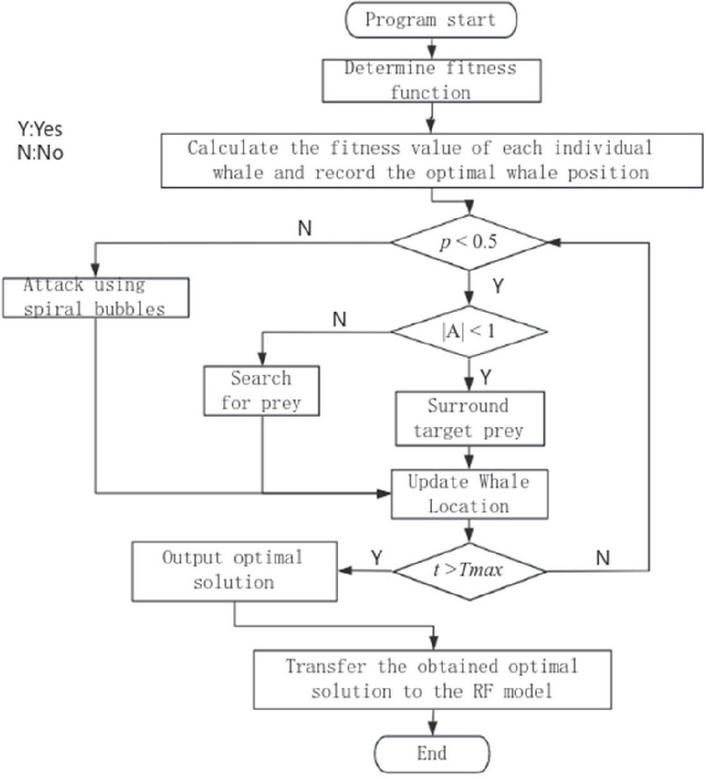
Figure 3 Flowchart of WOA algorithm.
6 Model Testing
By using the WOA-RF algorithm for simulation analysis of the error can be understood that the improved prediction algorithm error is low, and tends to be stable. It shows that the optimized regression forest model has good fitting ability and generalization ability, and it can also predict the unknown maximum power data. In addition, when the training error and the verification error are stable, it can be considered that a relatively good number of trees has been found, which can accurately fit the data while avoiding the problem of over-fitting or under-fitting.
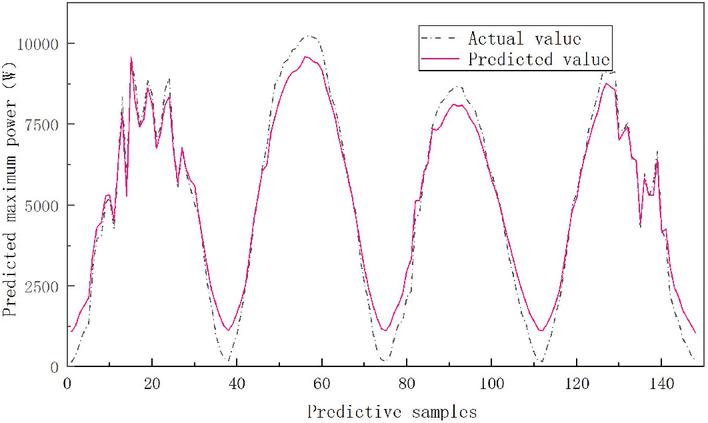
Figure 4 Comparison of prediction results of WOA-RF training set.
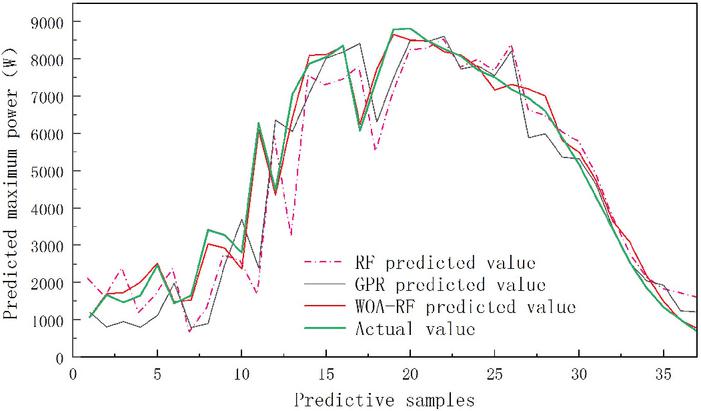
Figure 5 Comparison of the prediction results of the three algorithms for Case 1.
The model training was selected from the 148 sets of training set data mentioned above. The process of model training includes the steps of data processing, feature selection, model selection and parameter tuning. Through continuous iterative training, the optimized model is gradually obtained, and Figure 5 presents the results obtained from the training.
The root mean square error (RMSE) of the training set is 0.92062; the mean absolute error (MAE) of the training set data (the absolute error between the average predicted value and the true value) is 0.72814; and the mean bias error (MBE) of the training set data (the bias between the average predicted value and the true value) is 0.86938. It can be seen that the introduction of the Whale Optimization Algorithm has optimized the model. The number of decision trees, the minimum number of samples on nodes, and feature selection parameters in the random forest regression model were chosen as the optimization targets, and the Whale Optimization Algorithm was used to adjust these parameters. After multiple experiments, it was found that the optimal number of decision trees in the adjusted model is 173, resulting in improved predictive performance. This simulation used two time points as the prediction objects, and the predicted results are as follows:
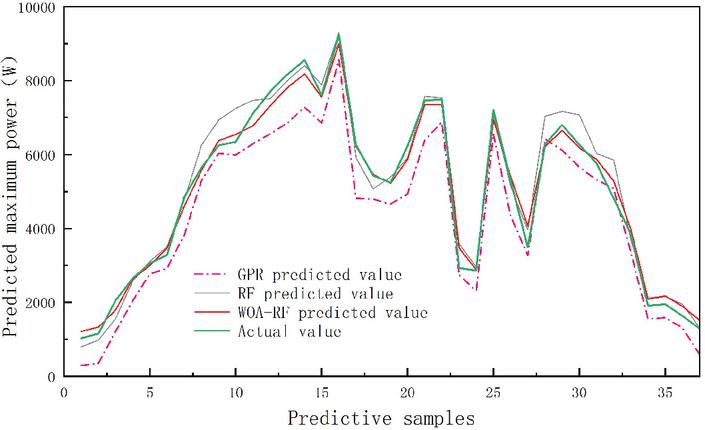
Figure 6 Comparison of the prediction results of the three algorithms for Case 2.
Figures 5 and 6 illustrate a comparison of the model prediction results for two working conditions using three algorithms: WOA-RF, RF, and GPR. Scenario 1 represents a sunny weather condition with few abrupt changes in irradiance; scenario 2 represents a cloudy weather condition with frequent fluctuations in irradiance. After analyzing and comparing the different prediction curves output by different algorithms under the same prediction dataset conditions, it is easy to observe the differences in the prediction results of each algorithm.
In terms of the accuracy of photovoltaic power prediction, considering the advantages and disadvantages of various prediction and evaluation indicators and the requirements of the predicted power in this paper, two indicators are selected as the accuracy measures of the photovoltaic power prediction algorithm in this study, namely, the average absolute percentage error (MAPE) and the root mean square error (RMSE). The accuracy of the prediction power is evaluated by calculating the difference between the prediction data and the test sample data; the smaller the RMSE and MAPE, the higher the accuracy.
Table 1 Prediction errors of different prediction models
| mould | RMSE | MAE | MAPE |
| RF | 3.6208 | 2.9452 | 0.0366 |
| GPR | 2.0390 | 2.3264 | 0.0219 |
| WOA-RF | 1.6012 | 1.8365 | 0.0161 |
The experimental results indicate that optimizing the random forest regression model with the Whale Optimization Algorithm for Regression Forest (WOA-RF) prediction algorithm can effectively improve prediction accuracy and has high reliability. After a series of simulation verifications, the most ideal WOA-RF model was selected to be used for the rational utilization of the output power of the photovoltaic system.
As shown in Table 1, the mean absolute percentage error (MAPE) of the WOA-RF prediction model is 0.0058 and 0.0205 lower than the GPR model and the unoptimized RF model, respectively, demonstrating the high accuracy of the WOA-RF prediction model. The experimental results show that using the Whale Optimization Algorithm for Regression Forest (WOA-RF) prediction algorithm to optimize the random forest regression model can effectively improve prediction accuracy.
7 Validation of Multi-Peak Composite MPPT Algorithm for WOA-RF Combined with Variable Step Perturbation Observation Methods
7.1 Application of Algorithms
Traditional techniques for maximum power tracking are unable to handle situations where there are multiple peaks in the power curve. In this research paper, to ensure accurate tracking of the global maximum power point, the WOA-RF prediction model is coupled with the variable step-size perturbation observation method. The algorithm predicts the maximum power point corresponding to by the WOA-RF algorithm, which has some error with the actual value corresponding to the maximum power point. Accordingly, After acquiring value , it is perturbed utilizing the method of varying step size perturbation observation to ascertain the new maximum power point. Repeat the aforementioned procedures until convergence to the maximum power point is achieved. The aforementioned steps are repeatedly performed in an iterative manner until convergence to the maximum power point is attained.
| (14) |
Where is the MPP predicted in constantly using the power prediction model, and and are the current and previous moment’s real power values. is the step multiplier.
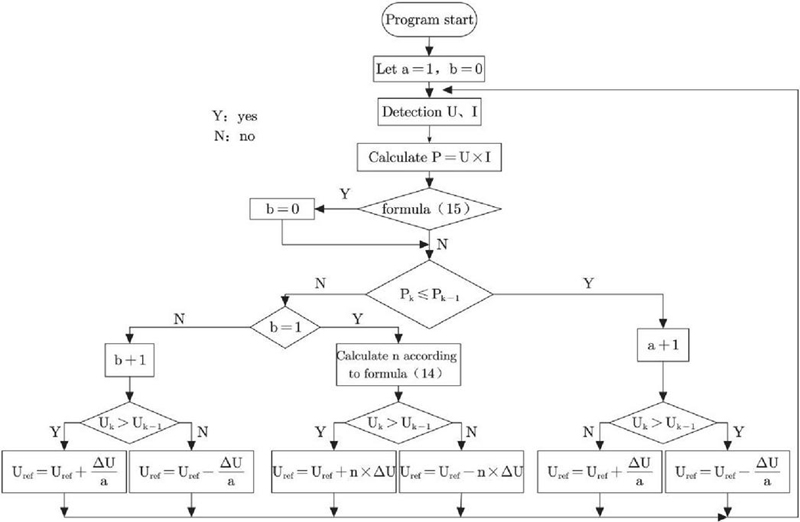
Figure 7 Flowchart of MPPT improvement using prediction algorithm.
Algorithm flowchart shown in Figure 7, the algorithm is improved on the basis of the perturbation observation method, the above flowchart introduces a, b, n three intermediate variables; where a as a divisor of the perturbation step, which is designed to make the perturbation step exponentially smaller; where b as a conditional variable of Equation (15), determines whether to carry out the n-fold step perturbation. If the model input characteristics do not change significantly, the continuous utilization of the WOA-RF forecasting model for real-time predictive control may result in significant fluctuations in the output power, which can affect its efficiency; therefore, it is necessary to set a start-up condition for the algorithmic model prediction, When the environmental conditions in which the photovoltaic (PV) arrays are situated undergo minor changes, the implementation of the variable step-size perturbation observation technique allows for the realization of MPPT. However, if the environmental conditions experience significant variations, the WOA-RF prediction should be restarted, followed by repeating the previous steps to ensure the global maximum power point tracking [17].
| (15) |
Where is the current moment PV cell output power value, is the previous moment PV cell output power value. is the maximum change in output allowed by the PV cell.
7.2 Simulation Analysis
Figure 9 presents the simulation model of the MPPT control system created in this study for validating the efficacy of the combined MPPT control algorithm. The composite algorithm incorporates the prediction model using WOA-RF and the method of variable step-size perturbation observation.
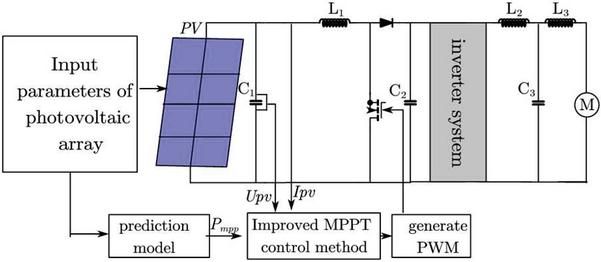
Figure 8 Simulation model of PV system.
The simulation system model mainly includes photovoltaic components with a total of 8 parallel circuits, Each series connection consists of 4 photovoltaic cell modules (V, A). Also include the boost circuit, inverter circuit, composite MPPT control module combining the WOA-RF prediction model with variable step-size perturbation observation method, Boost converter module, and PWM driver module. The PV array input parameters in Figure 8 are: total radiation, direct radiation, scattered radiation, temperature, humidity, and five independent variable input parameters.
This paper calculates the multiple of the disturbance step size based on the predicted results of the prediction algorithm model. This multiple is then input into the variable step perturbation observation method to form an improved MPPT control algorithm. The algorithm converts the latest disturbance step size into a PWM (Pulse Width Modulation) signal to control the boost converter circuit, thereby achieving the goal of maximum power tracking.
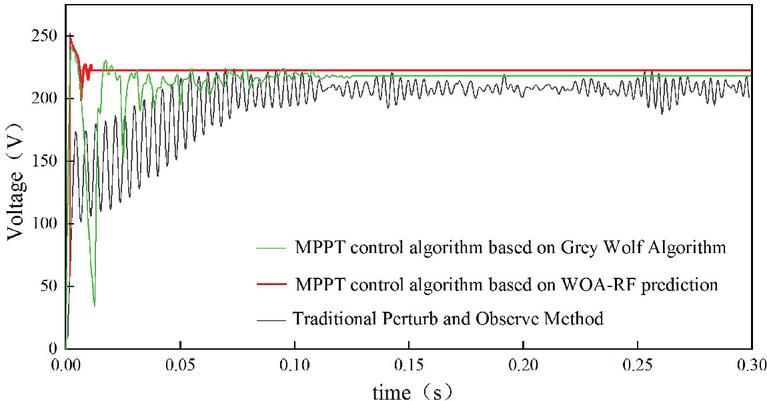
Figure 9 Bus voltage disturbance curve.
According to Figure 9, it can be clearly seen the improved MPPT control algorithm based on the WOA-RF prediction algorithm achieves a shorter time to track the maximum power point compared to the MPPT control algorithm based on the Grey Wolf Algorithm and traditional control algorithms. Although the intelligent MPPT algorithm based on the Grey Wolf Algorithm can effectively track the maximum power point, its tracking speed remains slow.
This indicates that the improved MPPT control method using the WOA-RF prediction model has the advantages of avoiding oscillation and misjudgment issues while maintaining good sensitivity.
(1) The single-peak MPPT simulation curves under light intensity W/m, temperature T 25C are shown below.
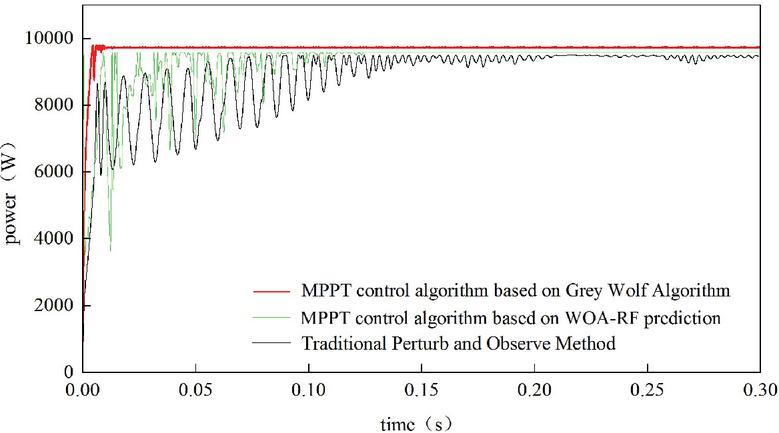
Figure 10 Comparison of the reference voltage of the two methods for single peaks.
Figure 10 shows the curve of the reference voltage of the PV system over time, and the reference voltage perturbation can be observed;The three methods, namely the traditional Perturb and Observe (P&O) method, the WOA-RF-based control algorithm, and the Grey Wolf Algorithm-based control algorithm, exhibit differences in tracking the maximum power and the speed of tracking the maximum power. The traditional P&O method, even when finding the maximum power point around 0.2 s, shows noticeable power oscillations. On the other hand, the WOA-RF-based control algorithm and the Grey Wolf Algorithm-based control algorithm can adaptively adjust the perturbation step size, resulting in smaller power oscillations. In comparison to the Grey Wolf Algorithm-based control algorithm, the WOA-RF-based control algorithm demonstrates faster tracking speed, smaller amplitude, and less energy loss.
By comparing the results of these three methods, it is evident that the improved control method outperforms in terms of response speed and stability. It enables rapid and accurate tracking of the maximum power point of the photovoltaic system, enhancing the output power and keeping the output power of the solar cells near the maximum power point consistently.
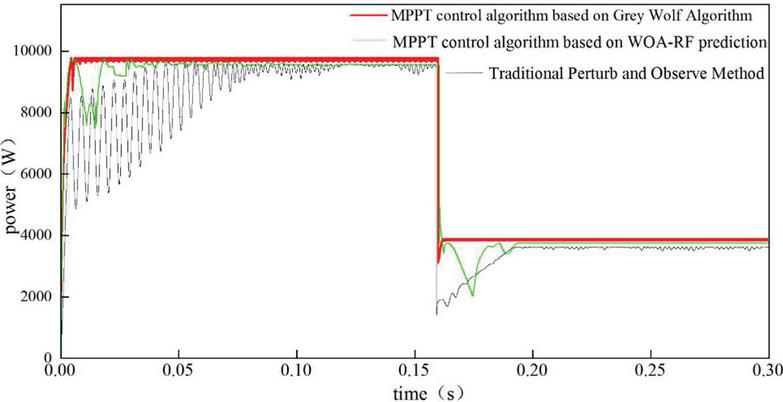
Figure 11 Comparison of multi-peak maximum power outputs.
(2) The output characteristic curve of the PV cell shows a multi-peak characteristic due to the PV cell under the shading condition. To simulate the actual operating conditions of a photovoltaic (PV) cell under shading, a sudden decrease in light intensity is introduced within a time frame of 0.3 seconds. In the MPPT (Maximum Power Point Tracking) control algorithm, parameter is set to 0.05. When the power fluctuation growth rate exceeds the set value under variable small perturbations, the predictive model is triggered. The simulation results, as shown in Figure 11, demonstrate that when the initial light intensity is set to 1000 W/m, the PV system using the improved MPPT control algorithm reaches the maximum power output around 0.01 seconds. When the light intensity suddenly changes to 400 W/m, the system searches for and stabilizes at the maximum power point around 0.17 seconds, consuming only approximately 0.0014 seconds. The maximum output power is 4120 W. Based on the analysis above, when there is a transient change in light intensity, this algorithm can quickly respond, has a short transient process, enhances the system’s input power, and efficiently tracks the maximum power point.
8 Conclusion
When the PV cell is partially shadowed, its characteristic curve has multiple extreme points, and the traditional MPPT algorithm is prone to make the PV maximum power tracking system misjudge and look for the wrong direction of the MPP when faced with this situation, resulting in the failure to maximize the PV output efficiency and causing energy waste. In this paper, the WOA-MPPT algorithm is proposed. The proposed multi-peak composite MPPT method discussed in the paper combines the WOA-RF prediction algorithm with the variable step-size perturbation observation method. This combination results in excellent stability, sensitivity, and response speed. The method effectively tracks the maximum power point of multi-peak PV systems, leading to improved efficiency. These characteristics make it highly practical and promising for application in real-world scenarios.
Acknowledgments
This research was supported by Hunan Provincial Natural Science Foundation (2022JJ50122).
Conflict of Interest
We all declare that we have no conflict of interest in this paper.
Availability of Data and Materials
All data generated or analysed during this study are included in this article.
References
[1] Sutikno T, Subrata A C, Jusoh A. A New FL-MPPT High Voltage DC-DC Converter for PV Solar Application[J]. Distributed Generation & Alternative Energy Journal, 2022: 1527–1548.
[2] Gupta A, Sharma S, Saroha S. A New Hybrid Short Term Solar Irradiation Forecasting Method Based on CEEMDAN Decomposition Approach and BiLSTM Deep Learning Network with Grid Search Algorithm[J]. Distributed Generation & Alternative Energy Journal, 2023: 1073–1118.
[3] Dai Jing, Wang Jianxiao, Zhang Zhaohua et al. Morphological characteristics and key technologies of electrically new power systems [J/OL]. New Power System, 2023, 1(2):161–183.
[4] Ghatak A, Pandit T, Kishan D, et al. Comparative Analysis of Maximum Power Point Tracking Algorithms for Standalone PV System Under Variable Weather Conditions[J]. Distributed Generation & Alternative Energy Journal, 2023: 215–248.
[5] Shi Y. Application of energy storage system in new energy generation system [J]. Industrial Innovation Research, 2023, (20): 96–98.
[6] Xu Libin, Cheng Ruofa, Yang Jiajing, Liu Lubing. Improved INC algorithm for rapid change of light intensity[J]. New Technology of Electrical Engineering and Electricity, 2020, 39(08):56–65.
[7] Alaas Zuhair, Eltayeb Galal eldin A., Al Dhaifallah Mujahed, Latifi Mohsen. A new MPPT design using PV-BES system using modified sparrow search algorithm based ANFIS under partially shaded conditions [J]. Neural Computing and Applications, 2023, 35(19): 14109–14128.
[8] Guo Jinzhi, Pan Zijun, Yuan Shaojun, et al. A variable step-size MPPT algorithm based on improved conductivity increment method[J]. Electrical Drives, 2022, 52(20):50–56.
[9] Liu Bangyin, Duan Shanxu, Liu Fei, Xu Pengwei. Maximum power point tracking of photovoltaic array based on improved perturbation observation method[J]. Journal of Electrotechnology, 2009, 24(06): 91–94.
[10] Wang Jinyu, Wang Yuxin, Wang Haisheng. Photovoltaic maximum power point tracking based on quantum CS-P&O algorithm[J]. Power Technology, 2022, 46(07):789–792.
[11] Chepuri Venkateswara Rao, Rayappa David Amar Raj, Kanasottu Anil Naik. A novel hybrid image processing-based reconfiguration with RBF neural network MPPT approach for improving global maximum power and effective tracking of PV system [J]. International Journal of Circuit Theory and Applications, 2023, 51(9): 4397–4426.
[12] Lv GuanXi, Bai Di. Research on MPPT control strategy based on the Perturbation observation method [J]. Journal of Physics: Conference Series, 2023, 2474(1).
[13] Gao, Jian, Guo, Qian, Weidong. Typical fault analysis and diagnosis of photovoltaic modules based on their I-V output characteristics [J/OL]. China Test, 1-6 [2023-11-23].
[14] Ran Chengke, Xia Xiangyang, Yang Mingsheng, et al. Photovoltaic power prediction by BP network based on day type and fusion theory[J]. Journal of Central South University (Natural Science Edition), 2018, 49(09):2232–2239.
[15] Zhou Liang, Wu Meina, Hu An. Fast modeling of photovoltaic arrays under localized shading and characterization of extreme point distribution[J]. Journal of Electrotechnology, 2021, 36(S2):572–581.
[16] Shi Ji-Ying, Xue Fei, Qin Zi-Jian, et al. A 3-step photovoltaic maximum power point tracking algorithm[J]. Journal of Tianjin University(Natural Science and Engineering Technology Edition), 2016, 49(05):485–490.
[17] Mirjalili S, Lewis A. The whale optimization algorithm[J]. Advances in Engineering Software, 2016, 95: 51–67.
[18] Zhao YN, Ye L, Zhu QW. Characterization and processing methods of wind abandonment anomaly data clusters in wind farms[J]. Power System Automation, 2014, 38(21):39–46.
[19] Li Terrible Yong, Zhang Weibin, Zhao Xinzhe, et al. Improved whale algorithm to optimize support vector regression for photovoltaic maximum power point tracking[J]. Journal of Electrotechnology, 2021, 36(09):1771–1781.
[20] Hou Shuaihu, Zhao Hui, Yue Youjun, Wang Hongjun. MPPT tracking study of photovoltaic system under localized shading based on IDBO-IP&O algorithm [J/OL]. Complex Systems and Complexity Science, 1–9 [2023-11-23].
[21] Li Hongyan, Wang Lei, An Pingjuan, Yang Zhaoxu, Zhao Tianyue, Liu Bao. Study of photovoltaic MPPT under localized shading based on improved viscous bacteria algorithm [J]. Journal of Solar Energy, 2023, 44(10): 129–134.
[22] Guo, Kunli, Liu, Luyu, Cai, Weizheng. Research on photovoltaic multi-peak MPPT based on hybrid algorithm [J]. Power Technology, 2021, 45(08): 1040–1043.
Biographies

Zhiwei Xu was born in Hunan, China, in 1978. He received the M.S. and Ph.D. degrees in 2006 and 2014, respectively, from the College of Electrical and Information Engineering, Hunan University (HNU), Changsha, China. He is currently a associate Professor of Mechanical Engineering with the Hunan Institute of Engineering, Xiangtan, China. His current research interests include wind power generator and its control, power electronic transformer system, special motor and control.

Bin Wang was born in Xiangtan, Hunan in 1997 and graduated with a bachelor’s degree from Hunan Institute of Engineering. His main research direction is new energy and smart grid.

Kexian Xiang was born in 2000 in Hunan, China. He graduated from the School of Applied Technology of Hunan University of Engineering in 2022 and is now a graduate student at Hunan University of Engineering. His current research interests include power electronic transformer systems and photovoltaic power forecasting.

Xianguo Li was born in Shandong, China, in 1999. He is a Master’s student at Hunan University of Engineering, Xiangtan, China in 2023. His supervisor is Zhiwei Xu, Associate Professor, Department of Mechanical Engineering, Hunan University of Engineering, Xiangtan, China, and his research interests are in the area of new energy and smart grids.

Wantai Liu was born in Henan, China, in 1981. He is currently an associate professor at the School of Wind Energy Engineering, Hunan Electrical Vocational and Technical College. At present, the research direction is motor electromagnetic scheme design and motor control.
Distributed Generation & Alternative Energy Journal, Vol. 39_4, 851–874.
doi: 10.13052/dgaej2156-3306.3948
© 2024 River Publishers