An Improved HBA Method for Path Planning of Substation Inspection Robots
Tang Shengfei*, Xie Hui, Zhou Jingjing, Chen Jin and Meng Zhigang
State Grid Shanghai Municipal Electric Power Company, Shanghai, 2000000, China
E-mail: 1961467934@qq.com
*Corresponding Author
Received 18 July 2024; Accepted 22 August 2024
Abstract
Aiming at the problems of honey badger algorithm (HBA) in the path planning of substation inspection robot, such as long path length, time-consuming search and high obstacle risk rate, an improved HBA algorithm called IHBA is proposed. Firstly, the honey badger population is initialized by reverse learning mechanism to increase its diversity. Secondly, the adaptive weight factor is used to improve the density factor of the HBA, which effectively balances the exploration capacity in different stages and improves the optimization accuracy of the population. Finally, the elite mutation strategy is used to strengthen the honey badgers’ location, which can guide the population to produce offspring in the food source area with better adaptability. To verify the improved effect of the algorithm and its path planning performance, the path planning experiments are designed, which indicate that compared with the BOA, IACO, GFA and classic HBA, the proposed IHBA in this paper has shorter path, higher search efficiency and lower obstacle risk rate, which can not only help the substation inspection robot plan the optimal path globally, but also increase the smoothness of the planned path.
Keywords: Substation inspection robot, reverse learning mechanism, adaptive weight factor, elite mutation strategy, path planning.
1 Introduction
In modern enterprise, it is usually necessary to regularly check many equipments and components in substations, such as switchgear, transformers and protective devices, to ensure their normal operation [1]. With the expansion and complexity of the power system, it is difficult for manual inspection to comprehensively monitor and manage the substation, which will directly affect its efficiency and performance [2]. The traditional path planning method has some limitations in dealing with complex dynamic environment, such as the planned path is not short enough, the search time-consuming and the obstacle risk rate is high. Therefore, inspection robots can be used to inspect and maintain substations, improve inspection efficiency, and reduce personnel costs and exposure risks, which has important practical significance [3]. In the path planning field of traditional substation inspection robot, it mainly include Dijkstra [4], A* [5], PRM [6] and RRT [7] methods. However, although these algorithms can quickly find the complete path, they may have some shortcomings such as long planning path, time-consuming and high obstacle risk rate, and they still have certain limitations for substation inspection robots [8]. In recent years, some bio-heuristic algorithms have gradually attracted the interest of scholars [9], developed by learning the behaviors and strategies of creatures in nature, which can help the inspection robot to effectively plan the path, avoid obstacles and find the best path in a complex environment. Common bio-heuristic algorithms mainly include the ACO [10], GWO [11], butterfly optimization algorithm [12] and honey badger algorithm [13].
The HBA method is a novel method developed by Fatma et al. [13] in 2022 by imitating Honey Badger’s foraging behavior strategy, which offers the benefits of simple variables. However, when solving complex engineering optimization problems, still issues with the the classical HBA, such as its sluggish convergence and susceptibility to local optimization. Therefore, this paper proposes an improved HBA (IHBA) for path planning of substation inspection robots. Firstly, the honey badger population is initialized by reverse learning mechanism, which increases the population diversity and makes its population distribution more uniform. Then, an adaptive weight factor is proposed to improve the density factor of HBA, which effectively balances the ability in different stages. Finally, the elite mutation strategy improves the location update mode of honey badger to avoid the algorithm falling into local optimization.
The primary contributions of this paper include:
1. This paper introduces an innovative improvement to HBA aimed at addressing the path planning challenges encountered by substation inspection robots.
2. The honey badger population undergoes an initialization process through reverse learning mechanisms, enhancing diversity and refining the algorithm’s initial solution quality.
3. A novel adaptive weight factor is introduced to enhance the density factor of HBA, effectively balancing the algorithm’s search capability across different stages and accelerating convergence rates.
4. The adoption of an elite mutation strategy enhances the location update mechanism of honey badgers during both digging and honey phases, thereby preventing the algorithm from getting trapped in local optima.
2 Related Work
Researchers have conducted studies on traditional global path planning algorithms applied to address path planning challenges for substation inspection robots. Aiming at the problem that most inspection tasks of high-voltage substations take a long time for a single substation robot, Chen Xiao et al. [14] proposed a time window-based path planning method for multiple inspection robots, allowing simultaneous task execution by multiple robots in substations, thereby greatly enhancing maintenance efficiency. Wang Lei et al. [15] integrated the navigation system of a line patrol robot and introduced a navigation approach based on wireless sensor networks, enhancing the robot’s adaptability. To address the challenges of increased inspection robot loads and expanding substation inspection areas, Tang Biao et al. [16] utilized a knowledge map approach to integrate data, which matched the inspection robot with the project standard and improved the work efficiency of inspection robot. Ren Jianxin et al. [17] built a chassis simulation environment in ROS, and developed a new navigation system to integrate odometer and inertial navigation data, thus realizing the automatic navigation of the inspection robot in substation. As the shortcomings of A* method, including slow search speeds, excessive curved paths, roughness, and vulnerability to obstacles, Luo Ping et al. [18] introduced an enhanced A* method and designed an heuristic function with dynamic adjustment of weighting factors to prevent robot collisions with obstacles and smooth the generated path using the Bezier curve method, which improved the efficiency of mobile robots’ inspection of substations. Liu Zixuan et al. [19] introduced a novel method, integrating the obstacle and lidar information into a finite state, establishing an environmental model to increase the training efficiency and verify the method in gazebo simulation environment. By selecting, hybridizing and mutating populations, Chen Luobing et al. [20] introduced a method to plan the shortest path of intelligent inspection robots, while avoiding the detected obstacles, which improves the inspection efficiency of robots in remote wind farms. Zhang Xiaoye et al. [21] put forward a path planning algorithm for power equipment fault detection to reduce the collision times of the robot.
Furthermore, Wang Zhenwei et al. [22] devised an enhanced approach to address low efficiency in substation robot inspections. Su Lei et al. [23] put forward an intelligent inspection robot for substation based on real-time deep learning model. By integrating accelerated hardware module and software framework, it meets the calculation requirements of deep learning application, and has low energy consumption and high detection accuracy in fault diagnosis tasks of object detection and case segmentation. Song Baoye et al. [24] devised an enhanced ACO to solve the path planning problem of coal mine robots, taking into account the mixed cost related to the path distance and path optimization criteria. Ravankar Abhijeet et al. [25] introduced a method taking into account the remaining battery power and task priority, which can allocate the most suitable charging station for the robot that needs to be charged and reduce trajectory re-planning. As the traditional excitation bio-neural network method has the defect of neuron activity field near the boundary and obstacles, Chen Nankai et al. [26] proposed a method to complete the inspection tasks in intelligent microgrid, effectively shorten the path length and turn times, and have better inspection performance. Zhang Xin et al. [27] built a map model of substation based on graph theory to improve Dijkstra and make it more practical. To solve the problem that the historical path explored by ant colony cannot be fully utilized, Hou et al. [28] proposed an improved ant colony method (IACO) with communication mechanism. By integrating roulette method and adaptive S-shaped attenuation function, the heuristic information in different stages was optimized and the path planning performance of the IACO was improved. So as to solve the problem that firefly method (FA) is easy to fall into local optima, Zhang et al. [29] combined the FA and genetic method (GA) into GFA method, which was employed for robot path planning and improved the accuracy and adaptability of path optimization.
3 Classical HBA Method
Honey Badger Algorithm (HBA) is a novel intelligence optimisation algorithm proposed in 2022, which simulates the foraging behavior of honey badgers in nature, leveraging their effective search capabilities and rapid convergence speeds for optimization tasks. There are two main phases in which honey badgers acquire food, namely digging phase and honey phase. The former refers to continuously dig burrows to explore preys, while the latter refers to continuously capture preys. The HBA method mainly simulates these two unique predation modes of honey badgers, and builds relevant mathematical models for iterative optimisation.
3.1 Population Initialisation
The model of HBA method is established by simulating the predatory instincts of honey badgers to achieve optimization. In the first step of the HBA, population initialization generates the initial value evenly within the range of each feature, ensuring the diversity of the population. In other words, population initialization involves initial positions randomly within a defined boundary, which is expressed by the following formula:
| (1) |
Where, is the random value. is the i-th individual position. and denote the lower and upper bounds, respectively.
Assumed that the population is defined as and the intensity of prey is defined as , which affects the moving speed. As the honey badger approaches its prey, its intensity increases, resulting in faster movement. Specifically, the greater the intensity of smell, the faster the honey badger runs, and conversely, the slower the honey badger moves, as specified in the formula below:
| (2) |
Where, is known as the concentrated intensity. represents the distance. .
Assumed that the density factor of the HBA is defined as , which will decrease with the increase of iterations. Since the time-varying optimization path, the non-linear density factor is used to make the evolution process of the algorithm more stable, which is expressed by the following formula:
| (3) |
Where, represents the max iterations. , which set as 2 generally.
3.2 Digging Phase
During the digging phase, honey badgers are guided by the intensity of scent and proximity to prey, following a path that resembles a heart shape, which can be expressed by the formula:
| (4) |
Where, denotes the optimal position. means that the honey badger changes the search direction, which is expressed by the formula as follows:
| (5) |
Where, is the random value.
3.3 Honey Phase
During the honey phase, the honey badger adjusts its optimization path to follow the honey direction. The model of the path and track of the bird guide to the bee nest of the target is shown in the following formula:
| (6) |
Where, is the random value. At this phase, the honey badger mainly updates its position around the optimal food source position .
4 Improved HBA Method
4.1 Reverse Learning Mechanism
In the classical HBA method, it is guided by the prey intensity, which changes with time, and constantly searches for the optimal solution through iterations. However, when the optimal solution is a non-global optimal solution, the algorithm will fall into premature. Aiming at the premature problem, Long et al. [30] incorporated a reverse learning strategy into PSO to enhance the quality of the population. By comparing the original solution with the reverse solution generated by reverse learning mechanism, better individuals are selected to continue to join the population, so that the population range is expanded. In this paper, the reverse learning mechanism is introduced on the basis of different path updates of digging phase. During the iteration of the algorithm, the current population individuals are subjected to reverse learning strategy to generate a new reverse solution, which increases population diversity. The formulation of the reverse learning mechanism is as follows:
| (7) |
Where, represents the reverse learning solution. represents a solution of dimensional space. and represent the dynamic boundary of the whole population at the iteration. is a dynamic boundary expansion control quantity, and its value is a random number of [0, 1]. Compared with Tent chaotic mapping mechanism, it limits the inverse solution from crossing the boundary, further optimizes the population quality.
4.2 Adaptive Weight Factor
According to the HBA, with the nonlinear decrease of density factor , the algorithm gradually changed from global exploration to local development, but the decline curve of decreased slowly and could not converge to 0, which led to the decrease of search performance of the algorithm. Considering the influence of prey target on the location update of honey badger during hunting and the adaptive weight factor can effectively balance its ability in different stages. In this paper, an adaptive weight factor is proposed, as shown in the following formula:
| (8) |
Where, is variance. Then, the adaptive weight factor is introduced to improve the density factor , which is expressed as follows:
| (9) |
Compared with the classical HBA, the improved density factor decreases more rapidly in the pre-iteration and mid-iteration, which can increase the convergence speed. When becomes smaller, the local search ability strengthens. At the same time, random numbers with normal distribution are introduced to locally disturb .
4.3 Elite Mutation Strategy
In the classical HBA, honey badger individuals mainly update their positions around . However, the population individuals will gather at the edge, which will lead to the algorithm falling into a local optima. Then, an elite mutation strategy is introduced, which makes the population evolution more random and improves the overall optimization ability of the algorithm by randomly selecting three individuals who participate in the mutation with great differences in fitness. Specifically, the honey badger population is divided equally for two groups, one group carries out optimization by digging phase, and the obtained elite solution is set as , while the other group carries out optimization by honey phase, and the obtained elite solution is set as . Then, the elite solutions found by the two groups of populations are subjected to elite mutation to generate a new elite solution . This mutation strategy can guide the population to produce offspring in the food source area with better fitness, and at the same time avoid the blindness of the traditional differential evolution mutation process. The process of elite mutation is expressed by formula as follows:
| (10) |
Where, is the mutation factor; is the elite solution found by digging phase, is the elite solution found in honey phase, and is a new elite solution generated by elite mutation. Then, new elite solutions generated after elite mutation, and the solution with the smallest fitness among the three elite solutions is selected to guide the next generation of honey badger population to move to the global optimal position.
5 Simulation Experiments
5.1 Scenes Design And Parameter Settings
There are several simulation models of map environments to represent large substations. The grid map model includes feasible area and obstacle area, and the maintenance robot needs to avoid obstacles to patrol and maintain the substation. We model the substation as a directed graph, in which each grid represents a location in the substation and each edge represents the connectivity between two locations, so the constructed substation environment is as depicted in Figure 1.
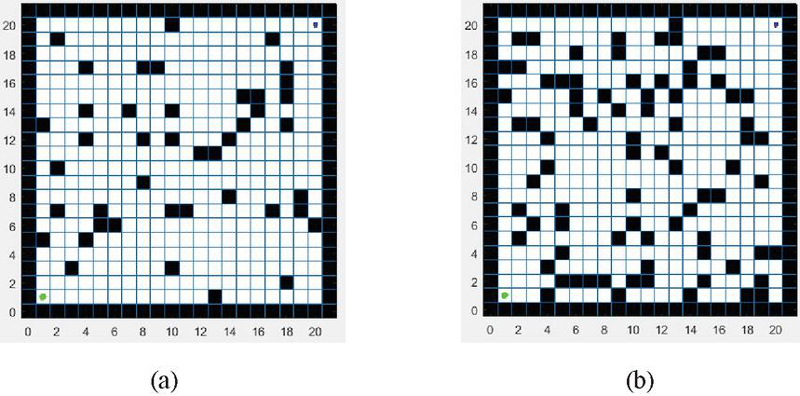
Figure 1 Two established simulation substation models: (a) substation model 1; (b) substation model 2.
Where, the scale of the two environmental map models is 20 m 20 m, and the gray indicates the feasible area, cyan represents the obstacles. The starting coordinates of the maintenance robot in the substation are (0.5, 0.5) and the ending coordinates are (19.5,19.5).
5.2 Compared Approaches
In substation model 1, the BOA, IACO in Ref. [28], GFA in Ref. [29], HBA and IHBA are employed for path planning of the substation robots, respectively. Then, the path planning outcomes are depicted in Figure 2.
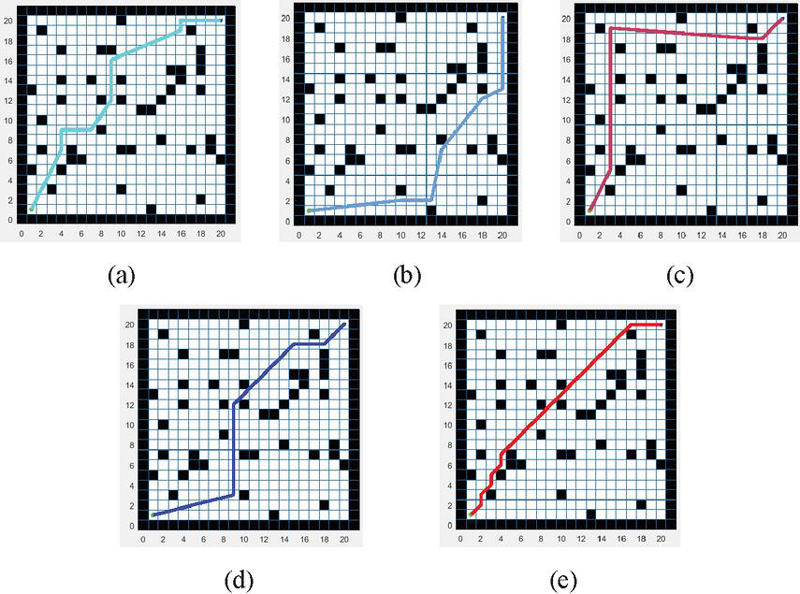
Figure 2 Path planning results of the proposed algorithm in substation model 1: (a) path planned by the BOA; (b) path planned by the IACO; (c) path planned by the GFA; (d) path planned by the HBA. (e) path planned by the IHBA.
Compared with the BOA, IACO, GFA and HBA, IHBA exhibits the shortest path length, minimal collisions, and a smoother trajectory. In order to clarify the contrast effect, the convergence curves are depicted in Figure 3.
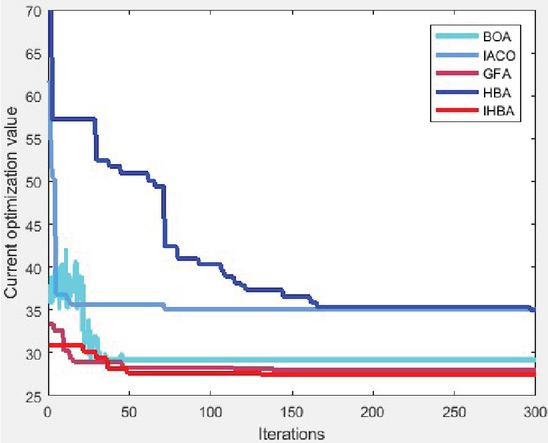
Figure 3 Convergence curve of fitness value of the mentioned algorithm (BOA, IACO, GFA, HBA, IHBA) in substation model 1.
As can be seen from Figure 3, compared with BOA, IACO, GFA and traditional HBA, the proposed IHBA has higher convergence accuracy in solving the path planning problem of inspection robot in substation model 1, and the convergence speed of the proposed IHBA is also higher than other algorithms.
In order to verify the generalization of IHBA, the BOA, IACO, GFA, HBA and IHBA are applied to plan path in substation model 2, and the path planning effect is depicted in Figure 4.
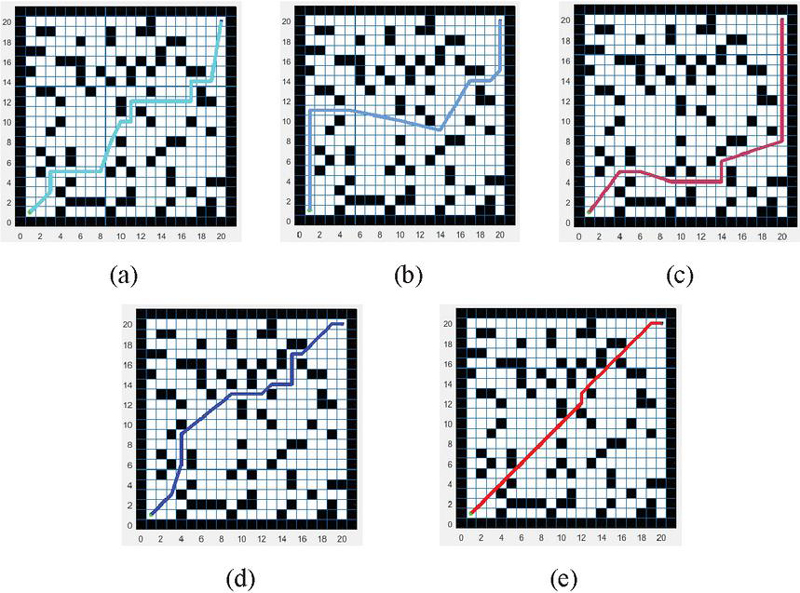
Figure 4 Path planning results of the proposed algorithm in substation model 2: (a) path planned by the BOA; (b) path planned by the IACO; (c) path planned by the GFA; (d) path planned by the HBA. (e) path planned by the IHBA.
Obviously, the path length of the substation maintenance robot planned by IHBA is the shortest, the path is smoother, and the number of collisions with obstacles is the least. The convergence curves are depicted in Figure 5.
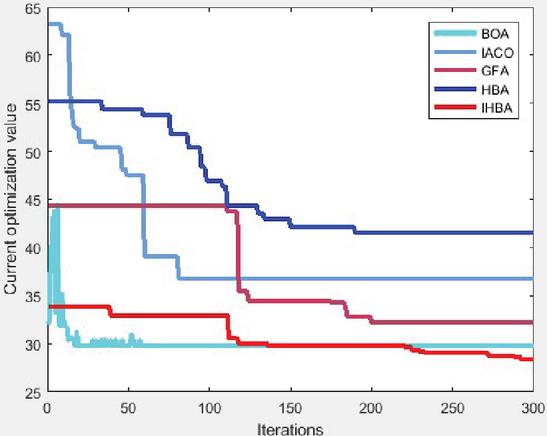
Figure 5 Convergence curve of fitness value of the mentioned algorithm (BOA, IACO, GFA, HBA, IHBA) in substation model 2.
As can be seen from Figure 5, the proposed IHBA has the highest convergence accuracy, and the traditional HBA has the lowest convergence accuracy. From the point of convergence speed, the proposed IHBA is the fastest convergence speed, and the traditional HBA is the slowest convergence speed.
After completing the comparative experiment of substation model 1 and substation model 2, three algorithms are evaluated based on three indicators: path length, search time, and obstacle risk rate, as presented in Table 1.
Table 1 Comparison of performance indexes of related algorithms
| Metrics | ||||||
| Environmental Model 1 | Environmental Model 2 | |||||
| Path | Search | Obstacle | Path | Search | Obstacle | |
| Algorithms | Length(m) | Time(s) | Risk Rate (%) | Length(m) | Time(s) | Risk Rate (%) |
| BOA | 30.21 | 9.91 | 23 | 39.79 | 12.12 | 27 |
| IACO | 32.51 | 4.17 | 17 | 42.87 | 9.82 | 22 |
| GFA | 31.19 | 5.42 | 14 | 41.22 | 8.72 | 19 |
| HBA | 29.97 | 6.05 | 12 | 31.55 | 7.76 | 15 |
| IHBA | 27.46 | 2.54 | 5 | 29.43 | 3.27 | 8 |
As can be seen from the table, whether in substation model 1 or substation model 2, compared with BOA, IACO, GFA and HBA algorithm, the proposed IHBA has the least planned path length, search time and obstacle risk rate.
6 Conclusion
In order to address the path planning challenge of substation inspection robots, this paper innovatively proposes an improved HBA method (IHBA). Firstly, the reverse learning mechanism initializes the honey badger population to increase its diversity. Then, an adaptive weight factor is proposed to improve the density factor of HBA, balance its ability, and accelerate the convergence. Lastly, the elite mutation strategy is applied to improve the location update mode of honey badger, so as to boost its efficiency and the probability of escaping local optima. The proposed IHBA is simulated in substation model 1 and substation model 2, and the path length, search time and obstacle risk rate of the inspection robot in substation planned by IHBA are reduced by 12.5%, 65.8% and 63.4% on average, respectively, compared with BOA, IACO, GFA and classical HBA. The proposed IHBA is only assessed through simulations, and the future research should focus on applying the IHBA to plan paths in actual substation to verify its effectiveness.
Potential Conflicts Of Interest: The author declares that there is no potential conflict of interest.
Funding Information: Not Applicable.
Acknowledgments: The author thanks the anonymous reviewers for their valuable comments.
Research Involving Human Participants And/Or Animals: Not Applicable.
Informed consent: The author unanimously agreed to the revision and publication of the manuscript.
Data Availability: Not Applicable.
References
[1] B. Patle, A. Pandey, D. Parhi, and A. Jagadeesh, “A review: On path planning strategies for navigation of mobile robot,” Defence Technology, vol. 15, no. 4, pp. 582-606, 2019.
[2] J. R. Sanchez-Ibanez, C. J. Pérez-del-Pulgar, and A. García-Cerezo, “Path planning for autonomous mobile robots: A review,” Sensors, vol. 21, no. 23, p. 7898, 2021.
[3] L. Liu, X. Wang, X. Yang, H. Liu, J. Li, and P. Wang, “Path planning techniques for mobile robots: Review and prospect,” Expert Systems with Applications, vol. 227, p. 120254, 2023.
[4] D.-D. Zhu and J.-Q. Sun, “A New Algorithm Based on Dijkstra for Vehicle Path Planning Considering Intersection Attribute,” IEEE Access, vol. 9, pp. 19761–19775, 2021, doi: 10.1109/access.2021.3053169.
[5] Z. Zhang, J. Wu, J. Dai, and C. He, “Optimal path planning with modified A-Star algorithm for stealth unmanned aerial vehicles in 3D network radar environment,” Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, vol. 236, no. 1, pp. 72–81, 2021, doi: 10.1177/09544100211007381.
[6] K. Cao, Q. Cheng, S. Gao, Y. Chen, and C. Chen, “Improved PRM for Path Planning in Narrow Passages,” in 2019 IEEE International Conference on Mechatronics and Automation (ICMA), 2019.
[7] Z. Wang, H. Sun, P. Cai, X. Lan, and D. Wu, “Multi-point traversal path planning of manipulator based on improved RRT algorithm,” in the 2019 International Conference, 2019.
[8] J. Zhang, X. Yang, W. Wang, J. Guan, L. Ding, and V. C. Lee, “Automated guided vehicles and autonomous mobile robots for recognition and tracking in civil engineering,” Automation in Construction, vol. 146, p. 104699, 2023.
[9] M. N. Ab Wahab, S. Nefti-Meziani, and A. Atyabi, “A comparative review on mobile robot path planning: Classical or meta-heuristic methods?,” Annual Reviews in Control, vol. 50, pp. 233-252, 2020.
[10] M. Dorigo, M. Birattari, and T. Stützle, “Ant Colony Optimization,” IEEE Computational Intelligence Magazine, vol. 1, no. 4, pp. 28–39, 2006.
[11] S. Mirjalili, S. M. Mirjalili, and A. Lewis, “Grey Wolf Optimizer,” Advances in Engineering Software, vol. 69, no. 3, pp. 46–61, 2014.
[12] S. Arora and S. Singh, “Butterfly optimization algorithm: a novel approach for global optimization,” Soft computing, vol. 23, pp. 715–734, 2019.
[13] F. A. Hashim, E. H. Houssein, K. Hussain, M. S. Mabrouk, and W. Al-Atabany, “Honey Badger Algorithm: New metaheuristic algorithm for solving optimization problems,” Mathematics and Computers in Simulation, vol. 192, pp. 84–110, 2022.
[14] X. Chen, X. Zhang, W. Huang, S. Liu, and H. Dai, “Coordinated optimal path planning of multiple substation inspection robots based on conflict detection,” in 2019 Chinese Automation Congress (CAC), 2019: IEEE, pp. 5069–5074.
[15] L. Wang, L. Yuan, and X. Zhang, “Research on navigation and control method for inspection robot in smart substation,” in Journal of Physics: Conference Series, 2022, vol. 2330, no. 1: IOP Publishing, p. 012014.
[16] B. Tang et al., “Multi-source fusion of substation intelligent inspection robot based on knowledge graph: A overview and roadmap,” Frontiers in Energy Research, vol. 10, p. 993758, 2022.
[17] J. Ren et al., “SLAM, Path Planning Algorithm and Application Research of an Indoor Substation Wheeled Robot Navigation System,” Electronics, vol. 11, no. 12, p. 1838, 2022.
[18] P. Luo, B. Li, X. Xue, and Z. Liu, “Research on Path Planning of Substation Inspection Robot Based on Improved A* Algorithm,” in 2022 China Automation Congress (CAC), 2022: IEEE, pp. 1119–1124.
[19] Z. Liu, Q. Wang, and B. Yang, “Reinforcement Learning-Based Path Planning Algorithm for Mobile Robots,” Wireless Communications and Mobile Computing, vol. 2022, 2022.
[20] L. Chen et al., “Remote wind farm path planning for patrol robot based on the hybrid optimization algorithm,” Processes, vol. 10, no. 10, p. 2101, 2022.
[21] X. Zhang, Z. Xie, and H. Wu, “Mobile robot full ergodic path planning algorithm for power equipment fault detection,” in Journal of Physics: Conference Series, 2021, vol. 1961, no. 1: IOP Publishing, p. 012073.
[22] Z. Wang et al., “Combined inspection strategy of bionic substation inspection robot based on improved Biological Inspired Neural Network,” Energy Reports, vol. 7, pp. 549–558, 2021.
[23] L. Su, X. Yang, B. Cao, Y. Wang, X. Li, and W. Lu, “Development and application of substation intelligent inspection robot supporting deep learning accelerating,” in Journal of Physics: Conference Series, 2021, vol. 1754, no. 1: IOP Publishing, p. 012170.
[24] B. Song, H. Miao, and L. Xu, “Path planning for coal mine robot via improved ant colony optimization algorithm,” Systems Science & Control Engineering, vol. 9, no. 1, pp. 283–289, 2021.
[25] A. Ravankar, A. A. Ravankar, M. Watanabe, Y. Hoshino, and A. Rawankar, “Multi-robot path planning for smart access of distributed charging points in map,” Artificial Life and Robotics, vol. 26, pp. 52–60, 2021.
[26] N. Chen and Y. Wang, “Design and collaborative operation of multimobile inspection robots in smart microgrids,” Complexity, vol. 2021, pp. 1–11, 2021.
[27] X. Zhang, S. Liu, and Z. Xiang, “Optimal inspection path planning of substation robot in the complex substation environment,” in 2019 Chinese Automation Congress (CAC), 2019: IEEE, pp. 5064–5068.
[28] W. Hou, Z. Xiong, C. Wang, and H. Chen, “Enhanced ant colony algorithm with communication mechanism for mobile robot path planning,” Robotics and Autonomous Systems, vol. 148, p. 103949, 2022.
[29] T.-W. Zhang, G.-H. Xu, X.-S. Zhan, and T. Han, “A new hybrid algorithm for path planning of mobile robot,” The Journal of Supercomputing, vol. 78, no. 3, pp. 4158–4181, 2022.
[30] X. Long, W. Cai, L. Yang, and H. Huang, “Improved particle swarm optimization with reverse learning and neighbor adjustment for space surveillance network task scheduling,” Swarm and Evolutionary Computation, vol. 85, 2024.
Biographies
Tang Shengfei (born August 1995), originally from Jinhua, Zhejiang, is an Engineer specializing in electric energy metering research. He holds a Master’s degree in Engineering Management from Shanghai Jiao Tong University (September 2021–March 2024).
Xie Hui (born October 1972), hailing from Shanghai, is an Assistant Engineer focused on electric energy metering research. She obtained a Bachelor’s degree in Business Administration with a concentration in Electric Power Enterprise Management from Tongji University (September 2007–July 2009).
Zhou Jingjing (born March 1988), originating from Wuwei, Anhui, is an Engineer dedicated to electric energy metering research. She earned a Master’s degree in Instrument Science and Technology from Shanghai Jiao Tong University (September 2011–March 2014).
Chen Jin (born August 1994), from Zhongxiang, Hubei, is an Engineer specializing in electric energy metering research. He completed a Master’s degree in Electrical Engineering at Huazhong University of Science and Technology (September 2016–June 2019).
Meng Zhigang (born February 1979), a native of Shanghai, is a Senior Technician engaged in electric energy metering research. He received a Bachelor’s degree in Electronic Engineering from Shanghai Jiao Tong University (September 1999–January 2005).
Distributed Generation & Alternative Energy Journal, Vol. 39_4, 899–914.
doi: 10.13052/dgaej2156-3306.39410
© 2024 River Publishers