Path Planning of Electric Power Inspection Robot Based on Optimized AHA Method
Yupeng Li1, 2,*, Litao Sun1, Longxue Cheng1, 2, Xianxia Liang1 and Longfei Yue1
1Department of Electrical Engineering, Hebei Institute of Mechanical and Electrical Technology, Xingtai 054000, China
2Xingtai Technology Innovation Centre for Multi-Sensor Fusion and Intelligent IoT Electronic Product, Xingtai 054000, China
E-mail: liyupeng_china@163.com
*Corresponding Author
Received 09 March 2025; Accepted 22 March 2025
Abstract
Since the problems of artificial hummingbird algorithm (AHA) in electric power inspection robot (EPIR) path planning, including excessive route length, extended time and inadaptability, this paper proposes an improved AHA, called as IAHA. Firstly, an -stable distribution is applied to initialize the population and enhance its diversity. Secondly, the fractional order calculus is employed to update location mechanism of artificial hummingbird, balancing global search and local excavation capabilities. Finally, flexible t distribution is utilized to improve the location strategy of artificial hummingbird, enabling IAHA to escape local optima. When the route length, inspection time and adaptability are taken as the metrics, the proposed IAHA outperforms both particle swarm optimization algorithm (PSO) and the classical AHA, which has shorter route length and inspection time.
Keywords: -stable distribution, fractional order calculus, flexible t distribution, EPIR; path planning.
1 Introduction
The intelligent electric robot inspection system has increasingly become a crucial component of the power industry. As a critical element of power system, power patrol inspection usually needs to use electric robots to regularly inspect and maintain the switches, transformers and protective devices of substations [1]. Traditional manual inspections are inefficient and susceptible to human error. As power equipment becomes more complex, manual inspections face significant challenges, especially in high-voltage lines, remote areas, and difficult terrains, where the difficulty and risk increase. The stable operation of the power system is crucial for the economy and society, and patrol inspections play a direct role in ensuring power safety [2]. Therefore, seeking a more intelligent, efficient and safe inspection method has become a realistic problem to be solved urgently in the power industry.
As one of the core technologies to realize automatic inspection of substations, path planning technology has attracted extensive attention of scholars. With the increasing complexity of power system and the improvement of safety, reliability and economy requirements, substation automation inspection has become a key task in the power industry [3]. Therefore, using electric robots for patrol inspection, especially through accurate path planning technology, can greatly improve patrol inspection efficiency, reduce patrol inspection cost and effectively avoid potential safety hazards caused by manual patrol inspection while ensuring patrol inspection quality. In this context, path planning technology aims to provide efficient and reliable motion paths for electric robots to complete tasks in complex environments. Its application in electric patrol robots has gradually become an important direction of academic research, with important application value and practical significance [4].
Path planning means that in a given environment, the robot can reach the target point from the starting point through mathematical models and algorithms [5], while avoiding collision and optimizing the path length or time. In the task of automatic inspection of substation, electric robots need to move autonomously in complex power equipment and environment, avoid obstacles, plan the optimal inspection path, and be able to adjust flexibly under various external environment changes [6]. Therefore, the path planning of electric robot involves not only basic navigation and obstacle avoidance, but also the complexity of equipment layout in substation, the dynamic change of environment and and the time-sensitive nature of the tasks. Traditional route planning algorithms, such as RRT [7], PRM [8], A* [9], Dijkstra [10] and so on, have been widely used in various navigation and planning tasks. However, in the face of complex environment, these classical algorithms often face some obvious shortcomings, such as consuming a lot of computing resources when traversing the search space, constantly updating the shortest path value of each node during the traversal process, long planning time, high computational complexity, etc., especially in large-scale and real-time application scenarios, which can not meet the actual needs. In recent years, swarm intelligence optimization algorithm has gradually emerged.
The advantage of swarm intelligence optimization algorithm is that it can find a better solution in a large-scale search space, and can adapt to the dynamic changing environment, with strong robustness and adaptability. The AHA is an innovative method, which simulates the hunting strategy of hummingbirds for search and optimization [11]. Compared with the classical methods, the obvious advantage of AHA offers a significant advantage in finding an optimal path within a shorter time, especially suitable for dynamic environments that need rapid response, and it shows stronger adaptability and efficiency when dealing with complex environments or large-scale problems. However, the AHA has certain limitations in practical applications, such as a tendency to converge to local optima, which can degrade its performance, so it needs to be further improved. Therefore, based on previous research, this paper introduces the IAHA, which integrates multiple strategies. By combining advanced techniques such as -stable distribution, fractional-order calculus, and flexible t-distribution, it is applied to EPIR path planning. This approach enhances the patrol efficiency of electric robots and overcomes the limitations of traditional path planning algorithms.
The key contributions of this paper are outlined below:
1. An optimized AHA method (IAHA) is proposed to address the path planning issue of EPIR in substations.
2. -stable distribution method is used to initialize the artificial hummingbird population and enhance the solution quality.
3. Fractional-order calculus is employed to refine the artificial hummingbird position during the territorial foraging stage, balancing global search and local excavation capabilities
4. Flexible t distribution is employed to adjust the position of the artificial hummingbird during the migration foraging phase, improving the algorithm’s ability to escape local optima.
2 Related Work
The traditional global path planning algorithm has been widely used in the path planning of power inspection robot. For the purpose of RRT algorithm problems in path planning within complex scenarios, Huang et al. [12] introduced an enhanced RRT that utilizes a cyclic sampling strategy to ensure randomness, and developed a cost rule for filtering random points and incorporated the turning angle when selecting adjacent points. Li et al. [13] proposed the PQ-RRT*, which achieves rapid convergence to the optimal solution, provides a better solution, and demonstrates asymptotic optimality, as validated through benchmark comparisons.
In order to construct a near-optimal path, Aria et al. [14] developed an enhanced PRM, which minimized the path length through iterative sampling of an ellipsoid subset and employs local search to generate sample points. Ma et al. [15] introduced a two-way search PRM, which enhances search connection rules and adopts alternate search paths in positive and negative directions, unnecessary node connections were reduced, thus speeding up the efficiency of path planning. So as to solve the large memory space, Tang et al. [16] introduced an enhanced A-star incorporating bidirectional search, guide lines, and key point lists. By optimizing and rasterizing the A-star for indoor scenarios, memory usage is minimized without the need for complex calculations. In an effort to address the issue of long processing times, Hong et al. [17] enhance the A-Star by utilizing the terrain data map, which improved the mixed data structure. For the sake of solving the vehicle planning in car navigation system, Zhu et al. [18] considered the time attribute spent at intersections, developed a mathematical model of the problem, and proposed an improved Dijkstra with reverse labeling and analyzed that the algorithm had lower polynomial time complexity and faster convergence speed. To realize the efficient operation of railway logistics multi-robot system, Zhou et al. [19] proposed an improved Dijkstra. By introducing the real-time node occupancy rate and time window conflict judgment model, it can be used for global path planning and conflict coordination of multi-robot system, which can determine the shortest feasible path for each task and avoid the path conflict problem and adjust the on-orbit conflict dynamically.
In recent years, swarm intelligence optimization algorithm has been gradually recognized by scholars in the application of EPIR path planning. Goli et al. [20] introduced a butterfly optimization method (BOA) which used geometric shapes to mesh the environment. By routing in three-dimensional space with evolutionary algorithm, the random state was reduced, and the calculation speed was improved so as to minimize its operating power. Focusing on the deadlock phenomenon, Zhai et al. [21] introduced an modified BOA, which improved the diversity of butterfly population by establishing a grid model of path planning and introducing kent mapping in the process of population location. In addition, strategies such as adaptive weight coefficient, convex lens imaging and mutation operator solve the path planning problem effectively. In an effort to settle the premature convergence and particles easily falling into local optimum in traditional PSO, Cheng et al. [22] proposed an enhanced IPSO-GWO, which guide particles finding the path quickly. For the purpose of solving the UAV navigation in disaster scene, Yu et al. [23] presents a hybrid method combining GWO and DE, and the other wolves searched around alpha wolves to improve the development degree, and designed a mutation strategy based on rank, which promoted the development while maintaining the exploration ability. To address the UAV path planning in hostile environments, Shin et al. [24] introduced an optimized PSO to find the path, determined the path cost by considering the deadly envelope of air-to-air missiles, terrain shielding, anisotropic radar cross section and dynamic constraints of UAV, used multiple groups and subgroups to balance exploration and development, and used coordinate transformation to reduce the calculation time. Simulation experiments verified the performance of the proposed method.
3 Classical AHA Method
Artificial hummingbird algorithm (AHA) [11] is a new swarm intelligence optimization algorithm. With its unique physical model and powerful global search ability, it shows remarkable potential in solving complex optimization problems. As a natural method, AHA is developed by the hummingbirds flying. Hummingbirds, by virtue of their flexible and efficient flight modes, have shown outstanding exploration and utilization capabilities in nature. They catch nectar by constantly adjusting their flight trajectory, which inspires the design of artificial hummingbird algorithm, aiming at simulating the exploration and utilization mechanism of hummingbirds when looking for food, thus providing a new global optimization method. There are three foraging behaviors in the AHA, while the guided foraging and territorial foraging occur with equal probability of 50% each.
3.1 Guided Foraging
The core idea of AHA is to seek the nectar and explore the solution space by using flight strategy. Then, the initial position is randomly generated, which is expressed as:
| (1) |
Where, indicates the i-th position in space, and . and indicates the boundary vectors. stands for Hadamard product, which is used to multiply the elements at the corresponding positions of two vectors to obtain a new vector. and represent the upper and lower boundary vectors of d-dimensional space, respectively.
The access list is used to store the access information of hummingbirds, and help them find the target food sources during the flight. The integer value indicates the non-access time, and the longer the non-access time, the higher the priority. Therefore, AHA needs to update the visit table in real time according to the visit of hummingbirds. Hummingbirds have three flying skills in flight: diagonal flight, axial flight and omnidirectional flight. Each hummingbird will choose one of the flying skills with equal probability.
In the moving process to target food source, hummingbirds use different flight skills for path planning, and then obtain candidate food sources. The candidate food sources found by guided foraging:
| (2) |
Where, stands for flight vector. represents the position of the i-th food source in the iteration. represent the target food source position of the i-th hummingbird in the iteration. indicates the guiding foraging factor that obeys the standard normal distribution.
Hummingbird individuals update the position of the i-th food source in the iteration by comparing the nectar supplement rates of the old and new food sources, and the formula is as follows:
| (3) |
Where, represents fitness function, and its function value is nectar replenishment rate.
3.2 Territorial Foraging
In the process of hummingbirds foraging, hummingbirds are likely to forage in the vicinity of the current food source, choosing a suitable range for further search. This local search strategy can help hummingbirds improve their foraging efficiency, especially in the case of scattered food sources in the environment. By foraging in nearby areas, hummingbirds can not only save energy, but also quickly find more potential food sources, thus improving the success rate of foraging. The candidate food sources found by territorial foraging are expressed as follows:
| (4) |
Where, indicates the iterative hummingbirds position.
3.3 Migration Foraging
In the AHA, the migration coefficient is used to describe when and how hummingbirds migrate during their search. When the iteration count reaches a certain threshold, the hummingbird migrates to a randomly generated potential food source. The purpose of this migration process is to enhance the global search capability, and the new food source found by hummingbirds is expressed as:
| (5) |
Where, indicates the hummingbirds replenishment position.
4 Improved AHA Method
4.1 -stable Distribution
-stable distribution is a family of four-parameter distribution functions , which is a widely used random signal model [25], and is denoted as . And then, the parameter is a stability parameter, which determines the stability of distribution and the thickness of tail. The parameter is a skew parameter, which controls the skew degree of the distribution, that is, the asymmetry of the distribution. The parameter is the amplification factor, which is used to adjust the scale of distribution. The parameter is a displacement parameter, indicating the center position of the distribution.
-stable distribution is a very rich distribution family, which has three special cases [26]:
1. When, it is a Gaussian distribution, marked as , which is irrelevant to the skew parameter .
2. When and , it is Cauchy distribution, which is denoted as .
3. When and , it is a Levy distribution, which is denoted as .
The -stable distribution can be defined as:
| (6) |
Where, is the symbol of . Then, can be expressed as follows:
| (7) |
Where, stands for probability density function.
At the beginning of the improved AHA iterations, the mutation ability is strong beceause of the small value, which is helpful to enhance its optimization ability prematurely. Then, the value is increased to 2, and the Gaussian mutation is performed at this time, which has the strongest local search ability, which makes the improved AHA have both accuracy and global search ability, and has better applicability.
4.2 Fractional Order Calculus
Fractional order calculus (FOC) is extended from integer to fraction [27], which utilized in digital signal processing and image processing because of its memory, and its most commonly used definition is G-L. Then, the is expressed as:
| (8) |
Where, represents the increment in the interval [a,b]. By further derivation, the n-order derivative of can be expressed as follows:
| (9) |
Where, . By extending the order of the formula, when fractional order , it can be expressed as:
| (10) |
Where, denotes the Gamma. represents the fractional calculus defined by G-L.
In the territorial foraging stage, the newly defined boundary range gradually narrows with the iteration, which enables the algorithm to search in a more accurate area, but in a narrow search area, individuals are more likely to overlap.
Based on the above, the memory of fractional calculus is used to store the previous generation dynamic boundary information. Then, contemporary boundary is adjusted by optimization area, and the fractional order is adaptively adjusted by and . Moreover, the new generation individual position is updated based on the adjusted boundary. Specifically, let the cutoff order in the formula, which expressed as [28]:
| (11) |
Where, represents the result of fractional calculus. Since it gradually weakens with the passage of time, in the territorial foraging stage, the dynamic boundaries can be expressed as:
| (12) |
Where, stands for the optimal position of hummingbird, then the dynamic lower boundaries can be further expressed as follows:
| (13) |
Then, the dynamic upper boundaries can be further expressed as:
| (14) |
Where, the leftmost side of the equation defines the discrete form for G-L, and the fractional calculus equation can be expressed as:
| (15) |
Where, represents the maximum number of iterations.
4.3 Flexible t Distribution
t-distribution is widely used in statistical inference, and it can be expressed as [29]:
| (16) |
Where, is the degree of freedom. It is a transitional form between standard normal distribution and Cauchy distribution, and the t distribution can be transformed from Cauchy distribution to normal distribution by adjusting the degree of freedom.
The normal distribution is replaced with t distribution in the migration foraging stage of improved AHA, and the degree of freedom is set to be positive correlation. When increases with the number of iterations, the t distribution will gradually approach the standard normal distribution, and the foraging range of artificial hummingbirds is relatively concentrated, so the local search ability of the algorithm is enhanced [30]. Through the appropriate degree of freedom calculation method, the t distribution can give full play to the advantages of normal distribution and Cauchy distribution, and realize the adaptive transformation of the algorithm from global search to local search. The formula for calculating the degree of freedom can be expressed as follows:
| (17) |
Where, represents parameter of speed regulation. In different scenarios, the speed regulation parameter can be modified to choose faster convergence speed or higher convergence accuracy. Finally, random numbers are obtained according to the t distribution of each generation, and the offspring are diffused. Then the daughter diffusion position is expressed by the formula as follows:
| (18) |
Where, represents the position of offspring after diffusion of t distribution. stands for parent position. stands for diffusion coefficient. stands for t distribution random number when the degree of freedom is .
It is strong global search ability of t distribution, and mutation operator can be used to disturb the position of the solution. The location update method is expressed as:
| (19) |
Where, indicates flexible t mutation disturbance.
5 Simulation Experiments
5.1 Scenes Design And Parameter Settings
Several map simulation environment models are constructed to represent large substations. The grid map model includes feasible area and obstacle area, and the EPIR needs to avoid obstacles to patrol and maintain the substation. We model the substation as a directed graph, in which each grid represents a location in the substation and each edge represents the connectivity between two locations, so the constructed substation environment is as shown in Figure 1.
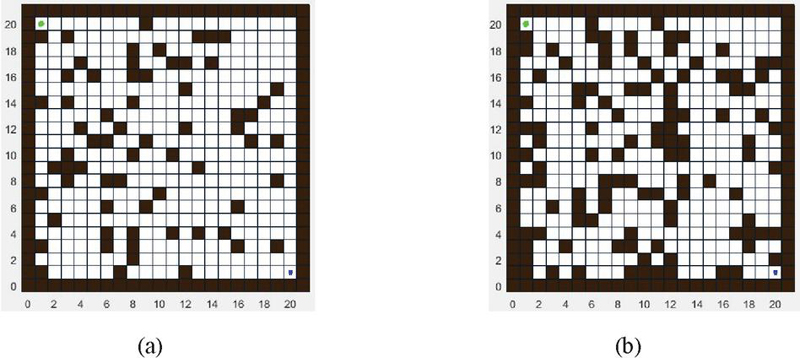
Figure 1 Two established simulation inspection models: (a) inspection model 1; (b) inspection model 2.
Where, the scale of the two environmental map models is 20 m 20 m, the gray represents feasible zone, and the cyan represents obstacles. The starting coordinates of the operation and maintenance robot in the substation are (0.5, 0.5) and the ending coordinates are (19.5,19.5). The artificial hummingbird population is initialized to 50, with a maximum of 300 iterations.
5.2 Compared Approaches
In inspection model 1, the PSO algorithm, AHA algorithm and IAHA algorithm are respectively used for the EPIR path planning. PSO is well-known for its strong global search capability, allowing it to find the global optimal solution, which is widely applied in path planning tasks [31]. The original AHA could be utilized to evaluate the path planning performance of the proposed IAHA in two distinct models. Therefore, PSO and AHA are selected as benchmark algorithms for comparison with the proposed IAHA method in this study. Then, the blue trajectory is planned by PSO, magenta trajectory is planned by AHA and red trajectory is planned by IAHA. The path planning outcomes of three algorithms are illustrated in Figure 2.
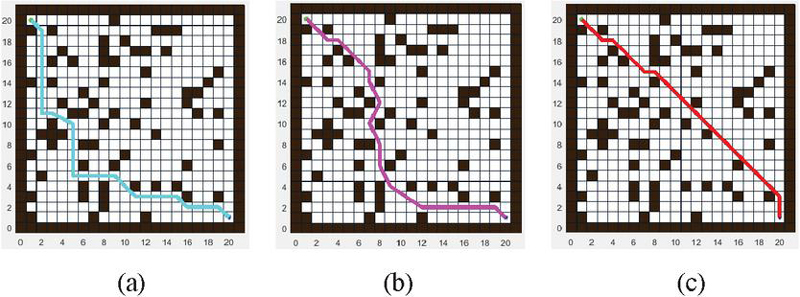
Figure 2 Results of three algorithms in inspection model 1: (a) planned by PSO; (b) planned by AHA; (c) planned by IAHA.
In Figure 2, the IAHA outperforms both the PSO and AHA in convergence speed and solution accuracy, demonstrating the shorter path, fewer collisions, and smoother trajectory, which shows that IAHA method has higher adaptability. To further illustrate this comparison, the convergence curves of three algorithms are presented in Figure 3.
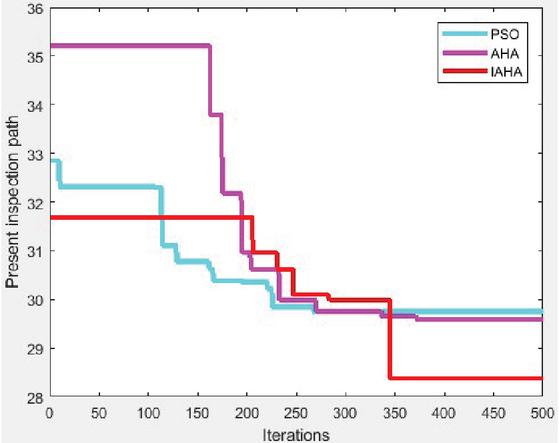
Figure 3 The present path of three algorithms in inspection model 1.
It is clearly that the IAHA exhibits faster convergence and higher accuracy compared to the PSO and AHA. In effort to assess the generalization of IAHA, three algorithms are applied to the EPIR path planning in inspection model 2, and outcomes is presented in Figure 4.
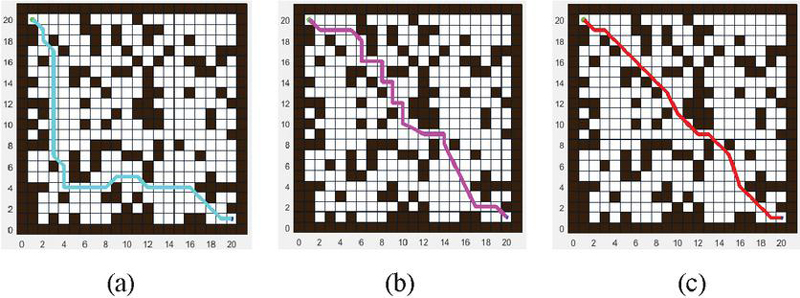
Figure 4 Results of three algorithms in inspection model 2: (a) planned by PSO; (b) planned by AHA; (c) planned by IAHA.
In Figure 4, the obstacles in the inspection model 2 become more complex, but the IAHA method shows faster convergence speed and solution accuracy, which can avoid obstacles more accurately and generate more optimized paths. The path length of EPIR planned by IAHA is shorter, with fewer collisions and smoother path. However, PSO and AHA algorithms have slow convergence speed under the same conditions, and the accuracy and feasibility of the path are low. The convergence curves of three algorithms are depicted in Figure 5.
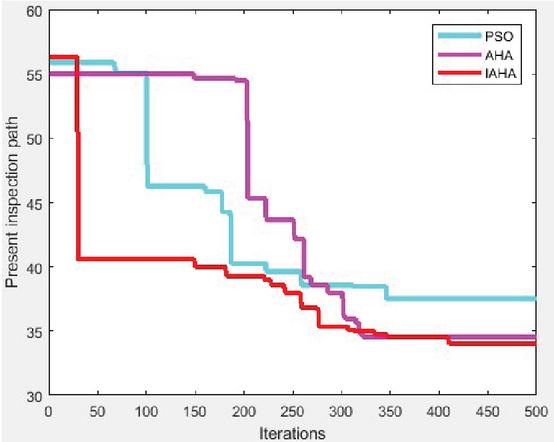
Figure 5 The present path of three algorithms in inspection model 2.
It is obviously that the IAHA outperforms the PSO and AHA, with higher final convergence accuracy. After completing the comparative experiment of inspection model 1 and inspection model 2, the three algorithms are summarized from three indicators, including route length, inspection time and adaptability, as shown in Table 1.
Table 1 Comparison of performance indexes of related algorithms
| Metrics | ||||||
| Inspection model 1 | Inspection model 2 | |||||
| Route | Inspection | Adaptability | Route | Inspection | Adaptability | |
| Methods | Length(m) | Time(s) | (%) | Length(m) | Time(s) | (%) |
| PSO | 31.68 | 8.23 | 49.65 | 38.69 | 11.36 | 53.04 |
| AHA | 29.62 | 5.67 | 59.67 | 36.48 | 7.64 | 59.15 |
| IAHA | 28.54 | 2.36 | 63.18 | 35.04 | 3.48 | 73.68 |
The adaptability is an index employed to measure the path quality planned by path planning algorithm in multi-obstacles map environment. The greater the adaptability, the better the path quality planned by the algorithm and the higher the generalization. As can be seen from the table, whether in inspection model 1 or inspection model 2, compared with PSO and AHA, the route length, inspection time and adaptability of IAHA are the least.
6 Conclusion
In this research, an enhanced AHA is innovatively proposed for EPIR path planning. Firstly, -stable distribution is utilized to initialize hummingbird population, enhancing the solution quality. Then, fractional order calculus is introduced to refine the hummingbird location in territorial stage, optimizing the balance between global search and local excavation capabilities. Finally, Flexible t distribution is employed to modify the hummingbird location in migration stage, boosting its ability to escape local optima. The proposed IAHA is simulated in inspection model 1 and inspection model 2, and the outcomes indicate that the route length, inspection time and adaptability of EPIR planned by IAHA are reduced by 11.02%, 71.32%, and 27.25%, respectively, compared to the PSO and AHA. The introduced IAHA is only evaluated in simulation, and may face challenges such as sensor accuracy and real-time requirements in practical application. Future research should focus on applying the IAHA method to the electric power inspection robot to verify its effectiveness.
Potential Conflicts of Interest
The author declares that there is no potential conflict of interest.
Funding Information
This paper was supported by Key Research and Development Plan Self Funded Project of Xingtai, Hebei Province in 2024 “Research on obstacle detection and path planning methods for indoor mobile robots based on binocular vision perception” (2024ZC044).
Acknowledgments
The author thanks the support of Xingtai Technology Innovation Center for Multi-Sensor Fusion and Intelligent IoT Electronic Product.
Research Involving Human Participants And/Or Animals
Not Applicable.
Informed Consent
The author unanimously agreed to the revision and publication of the manuscript.
Data Availability
Not Applicable.
References
[1] M. Jones, S. Djahel, and K. Welsh, “Path-planning for unmanned aerial vehicles with environment complexity considerations: A survey,” ACM Computing Surveys, vol. 55, no. 11, pp. 1–39, 2023.
[2] G. Gugan and A. Haque, “Path planning for autonomous drones: Challenges and future directions,” Drones, vol. 7, no. 3, p. 169, 2023.
[3] J. Zhao et al., “Autonomous driving system: A comprehensive survey,” Expert Systems with Applications, vol. 242, p. 122836, 2024.
[4] T. Shengfei, X. Hui, Z. Jingjing, C. Jin, and M. Zhigang, “An Improved HBA Method for Path Planning of Substation Inspection Robots,” Distributed Generation & Alternative Energy Journal, pp. 899–914, 2024.
[5] H. Hu, J. Zhao, Q. Li, Z. Jing, Q. Guo, and Z. Yang, “Research on Frequency Regulation with Dynamic Trajectory Planning of Participation Factors,” Distributed Generation & Alternative Energy Journal, pp. 751–776, 2024.
[6] S. Poudel, M. Y. Arafat, and S. Moh, “Bio-inspired optimization-based path planning algorithms in unmanned aerial vehicles: A survey,” Sensors, vol. 23, no. 6, p. 3051, 2023.
[7] I. Noreen, A. Khan, and Z. Habib, “Optimal path planning using RRT* based approaches: a survey and future directions,” International Journal of Advanced Computer Science and Applications, vol. 7, no. 11, 2016.
[8] P. Boldrini, P. Fiore, and G. Checchia, “A survey on surveys: How a national scientific society of PRM investigated itself to improve its activity,” Annals of Physical and Rehabilitation Medicine, vol. 61, p. e510, 2018.
[9] P. Paliwal, “A survey of a-star algorithm family for motion planning of autonomous vehicles,” in 2023 IEEE International Students’ Conference on Electrical, Electronics and Computer Science (SCEECS), 2023: IEEE, pp. 1–6.
[10] P. Niranjane and S. Amdani, “A Survey of Recent Applications of Improved Dijkstra’s Shortest Path Algorithm,” International Research Journal of Engineering and Technology (IRJET), vol. 7, no. 11, pp. 2395–0056, 2020.
[11] W. Zhao, L. Wang, and S. Mirjalili, “Artificial hummingbird algorithm: A new bio-inspired optimizer with its engineering applications,” Computer Methods in Applied Mechanics and Engineering, vol. 388, p. 114194, 2022.
[12] G. Huang and Q. Ma, “Research on path planning algorithm of autonomous vehicles based on improved RRT algorithm,” International Journal of Intelligent Transportation Systems Research, pp. 1–11, 2022.
[13] Y. Li, W. Wei, Y. Gao, D. Wang, and Z. Fan, “PQ-RRT*: An improved path planning algorithm for mobile robots,” Expert systems with applications, vol. 152, p. 113425, 2020.
[14] M. Aria, “Optimal path planning using informed probabilistic road map algorithm,” Journal of Engineering Research, 2021.
[15] X. Ma, R. Gong, Y. Tan, H. Mei, and C. Li, “Path planning of mobile robot based on improved PRM based on cubic spline,” Wireless Communications and Mobile Computing, vol. 2022, no. 1, p. 1632698, 2022.
[16] T. XiangRong, Z. Yukun, and J. XinXin, “Improved A-star algorithm for robot path planning in static environment,” in Journal of Physics: Conference Series, 2021, vol. 1792, no. 1: IOP Publishing, p. 012067.
[17] Z. Hong et al., “Improved A-Star algorithm for long-distance off-road path planning using terrain data map,” ISPRS International Journal of Geo-Information, vol. 10, no. 11, p. 785, 2021.
[18] D.-D. Zhu and J.-Q. Sun, “A new algorithm based on Dijkstra for vehicle path planning considering intersection attribute,” IEEE Access, vol. 9, pp. 19761–19775, 2021.
[19] X. Zhou, J. Yan, M. Yan, K. Mao, R. Yang, and W. Liu, “Path planning of rail-mounted logistics robots based on the improved dijkstra algorithm,” Applied Sciences, vol. 13, no. 17, p. 9955, 2023.
[20] H. Mazaheri, S. Goli, and A. Nourollah, “Path planning in three-dimensional space based on butterfly optimization algorithm,” Scientific Reports, vol. 14, no. 1, p. 2332, 2024.
[21] R. Zhai, P. Xiao, D. Shu, Y. Sun, and M. Jiang, “Application of Improved Butterfly Optimization Algorithm in Mobile Robot Path Planning,” Electronics, vol. 12, no. 16, p. 3424, 2023.
[22] X. Cheng, J. Li, C. Zheng, J. Zhang, and M. Zhao, “An improved PSO-GWO algorithm with chaos and adaptive inertial weight for robot path planning,” Frontiers in neurorobotics, vol. 15, p. 770361, 2021.
[23] X. Yu, N. Jiang, X. Wang, and M. Li, “A hybrid algorithm based on grey wolf optimizer and differential evolution for UAV path planning,” Expert Systems with Applications, vol. 215, p. 119327, 2023.
[24] J.-J. Shin and H. Bang, “UAV path planning under dynamic threats using an improved PSO algorithm,” International Journal of Aerospace Engineering, vol. 2020, no. 1, p. 8820284, 2020.
[25] A. Achim and E. E. Kuruoglu, “Image denoising using bivariate -stable distributions in the complex wavelet domain,” IEEE Signal Processing Letters, vol. 12, no. 1, pp. 17–20, 2004.
[26] C. Huang, W. Zhou, Q. Cheng, and R. Cao, “Probability density function analysis of water entry sound based on stable distribution model,” Ocean Engineering, vol. 285, p. 115299, 2023.
[27] R. E. Gutierrez, J. M. Rosario, and J. Tenreiro Machado, “Fractional order calculus: basic concepts and engineering applications,” Mathematical problems in engineering, vol. 2010, no. 1, p. 375858, 2010.
[28] A. P. Singh and K. Bingi, “Applications of fractional-order calculus in robotics,” Fractal and Fractional, vol. 8, no. 7, p. 403, 2024.
[29] W. Yao, Y. Wei, and C. Yu, “Robust mixture regression using the t-distribution,” Computational Statistics & Data Analysis, vol. 71, pp. 116–127, 2014.
[30] H. Zhang, Q. Huang, L. Ma, and Z. Zhang, “Sparrow search algorithm with adaptive t distribution for multi-objective low-carbon multimodal transportation planning problem with fuzzy demand and fuzzy time,” Expert Systems with Applications, vol. 238, p. 122042, 2024.
[31] G. Mengting, “Multi-objective Optimal Scheduling Analysis of Power System Based on Improved Particle Swarm Algorithm,” Distributed Generation & Alternative Energy Journal, pp. 1609–1636, 2023.
Biographies

Yupeng Li, M.E., is a lecturer at the Department of Electrical Engineering, Hebei Institute of Mechanical and Electrical Technology. His research focuses on mobile robotics, embedded systems, applied electronics, and IoT technologies.

Litao Sun, M.E., is a lecturer at the Department of Electrical Engineering, Hebei Institute of Mechanical and Electrical Technology. His research focuses on intelligent control systems, pattern recognition, and AI-driven defect detection.

Longxue Cheng, M.E., is a lecturer at the Department of Electrical Engineering, Hebei Institute of Mechanical and Electrical Technology. Her research covers applied electronics, information engineering, mobile robot localization algorithms, path planning algorithms, multi-sensor fusion frameworks, and embedded system development.

Xianxia Liang, M.E., is a lecturer at the Department of Electrical Engineering, Hebei Institute of Mechanical and Electrical Technology. Her research interests include mechatronics, industrial robotics, machine vision, and image processing.

Longfei Yue, M.E., is a lecturer at the Department of Mechanical and Electrical Technology. His work centers on control theory analysis and control-related engineering applications.
Distributed Generation & Alternative Energy Journal, Vol. 40_2, 239–258.
doi: 10.13052/dgaej2156-3306.4022
© 2025 River Publishers