Optimization of Electric Vehicle Discharge Strategy Based on Genetic Algorithm and Battery Loss
Yinquan Hu1,* and Heping Liu2
1School of Intelligent Manufacturing & Transportation, Chongqing Vocational Institute of Engineering, Chongqing, 402260, China
2School of Electrical Engineering, Chongqing University, Chongqing, 400044, China
E-mail: yinquanhu@outlook.com
*Corresponding Author
Received 10 March 2025; Accepted 10 September 2025
Abstract
This study endeavors to address several critical challenges. Traditional evolutionary algorithms frequently encounter the issue of being trapped in local optima and grapple with insufficient population diversity during the optimization of electric vehicle (EV) discharge strategies. Moreover, the disorderly discharge of EVs can precipitate instability in power grids and precipitate excessive battery degradation. To surmount these obstacles, this study introduces an optimized approach for formulating EV discharge strategies. This approach leverages an enhanced genetic algorithm that explicitly accounts for battery degradation. The Monte Carlo simulation technique is employed to construct a discharge load model for EVs that incorporates battery degradation. This model enables precise simulation of the erratic discharge behavior of EVs and facilitates the calculation of the aggregate discharge load. The experimental outcomes reveal that the refined algorithm exhibits accelerated convergence. After roughly 100 iterations, the accuracy stabilizes near 1.0, achieving the minimum loss function value. From an economic standpoint, the total cost associated with the ordered discharge strategy that considers battery degradation amounts to 1,340 yuan, markedly lower than the 1,565 yuan incurred by the ordered discharge strategy that neglects battery degradation. This research has effectively curtailed charging expenses and battery wear, bolstered power grid stability, and furnished pragmatic optimization methodologies to foster the sustainable advancement of the EV industry.
Keywords: Genetic algorithm, battery loss, electric vehicles, discharge strategy, optimize scheduling.
1 Introduction
As the global energy crisis escalates and environmental pollution issues grow increasingly acute, the development of electric vehicles (EVs) as a clean and sustainable transportation solution has attracted considerable scholarly and industrial attention [1, 2]. The extensive proliferation of EVs serves to mitigate greenhouse gas emissions and reduce reliance on fossil fuels. Nevertheless, their large-scale deployment has also introduced novel challenges, particularly in the domains of grid load management and battery performance enhancement [3–6]. The discharge strategy of EVs is crucial for the efficiency and stability of the entire energy system. A reasonable discharge strategy can not only optimize the energy utilization of EVs, but also reduce the impact on the power grid and extend the service life of batteries. However, the prevailing discharge patterns of EVs are predominantly characterized by randomness and a lack of coordination, which not only undermines the stability of the power grid but also accelerates battery degradation. This disordered discharge phenomenon occurs when EVs, in the process of feeding electrical energy back to the grid, operate without adhering to any predetermined schedule or strategy, resulting in haphazard electricity release. Given their global search capabilities, traditional evolutionary algorithms have been extensively employed to tackle such complexities, which encompass grid load management, mitigating grid instability arising from unregulated discharge behaviors, and safeguarding the overall robustness of the power system. Optimizing battery performance serves to mitigate the adverse effects of discharge patterns on battery lifespan and operational efficiency. Concurrently, economic cost optimization focuses on minimizing both the charging expenses and battery degradation costs associated with the discharge strategy, thereby enhancing overall economic returns. The global search capability inherent in the optimization algorithm prevents it from being ensnared in local optimal solutions – a common pitfall of traditional evolutionary algorithms – during the optimization process, enabling the identification of a globally optimal discharge strategy. However, traditional evolutionary algorithms often fall into local optima and lack population diversity when dealing with structural optimization of EVs, resulting in unsatisfactory optimization results. In addition, the impact of unregulated charging of EVs on grid stability and battery loss issues also need to be addressed [7, 8].
To deal with the matter of optimizing the discharge strategy of EVs, numerous studies have proposed different optimization strategies, among which the method based on Genetic Algorithm (GA) has garnered significant interest because of its beneficial attributes in global search ability and avoiding local optima. To deal with the matter of traditional evolutionary algorithms in handling EV structural optimization tasks, Lyu Fy et al. presented an improved GA based on reinforcement learning. This approach integrates a sophisticated mechanism that categorizes the population based on individual fitness rankings, dividing it into elite and regular subpopulations, and subsequently applies tailored selection and crossover-mutation strategies to each group. The research results indicated that the GA based on reinforcement learning had significant advantages compared to other evolutionary algorithms in solving the structural optimization problem of EVs [9]. To improve the performance of EV drive systems, Jassim et al. proposed a multi-converter/multi-machine system and induction motor drive scheme. Adaline neural network is used for field-oriented regulation, and speed control is achieved through a hybrid Proportional Integral Controller (PI) and Repetitive Integral Separated Controller (RISE) controller. The research results indicated that this neural network-based two-level controller significantly improved system performance and enhanced the traction and stability of EVs [10]. Du et al. proposed an improved particle swarm optimization algorithm to model the orderly charging strategy in response to the impact of disorderly charging of EVs on the power grid. After obtaining the distribution information of disordered charging of EVs through Monte Carlo (MC) simulation, the rotation matrix was used to slightly deflect the search direction of particles to maintain population diversity. Additionally, by modifying the inertia weight and learning factors, the original particle swarm’s issues of limited local optimization capability and premature convergence were mitigated. The outcomes indicated that the proposed ordered charging strategy could substantially decrease charging expenses and minimize peak-to-valley variations [11]. To mitigate the environmental repercussions associated with the construction of EV charging infrastructure and enhance user satisfaction, Alhussan et al. proposed a feature selection methodology based on the binary Gray Goose Optimization (GGO) algorithm. Subsequently, they formulated a strategy aimed at optimizing the allocation of charging demand across various charging stations. The research results indicated that by considering the expense factor related to traffic jams, this method could effectively optimize the layout of charging stations, reduce charging costs and peak valley differences, and enhance the efficacy and economy of EV charging [12].
In summary, traditional GA has insufficient considerations in terms of practicality, computational cost, and implementation difficulty. The algorithm has limitations in adaptability and generalization ability under different environmental conditions and EV characteristics, which may affect the comprehensiveness of optimization strategy selection and the effectiveness of practical applications. Therefore, to improve and reduce the charging cost of EVs, minimize battery losses, and enhance grid stability, a discharge strategy optimization method for EVs based on improved GA and battery losses is proposed. By constructing a discharge load model for EVs that considers battery loss, MC analysis is used to simulate the discharge behavior of EVs, and an improved GA is adopted to optimize the discharge strategy. The innovation of the research lies in incorporating battery loss factors into discharge strategy optimization. By combining GA and Simulated Annealing (SA) algorithm, it aims to achieve more refined local search to improve optimization efficiency and accuracy.
The contribution of the research lies in the establishment of an optimization system for EV discharge strategies that takes into account both battery loss and grid stability. Through the innovative integration of an IGA-SA, this approach effectively overcomes the limitations of traditional evolutionary algorithms, which are prone to becoming trapped in local optima and suffering from inadequate population diversity. Consequently, it achieves both efficient global optimization and meticulous local search capabilities for the discharge strategy. Meanwhile, a discharge load model considering battery loss is constructed based on Monte Carlo simulation, accurately quantifying the impact of disordered discharge on battery life and grid load. Experimental verification shows that this optimization strategy not only reduces the total cost of ordered discharge considering battery loss, but also significantly improves the convergence speed and stability of the algorithm. It offers practical and actionable technical solutions aimed at reducing charging expenses, prolonging battery lifespan, and bolstering the stability of the power grid. These solutions hold substantial practical importance in fostering the coordinated and sustainable advancement of the EV industry and the broader energy system.
The inaugural section, serving as the introduction, delves into the pivotal role of EVs as a sustainable and eco-friendly mode of transportation. It highlights the challenges posed by their widespread adoption, notably in terms of grid load management and the optimization of battery performance. Furthermore, it articulates the research objective of refining the discharge strategy by enhancing the GA with considerations for battery degradation factors. The second section, Methods and Materials, provides a detailed introduction to the construction of an EV discharge load model considering battery loss. In the third section, the performance of IGA-SA and other algorithms is compared through experimental parameter configuration, and its advantages in accuracy, convergence speed and loss function are analyzed. Combined with the cost data, the economy of the ordered discharge strategy considering battery loss is verified. The fourth section serves as a conclusion to the research findings, highlighting the factors that the model has not accounted for and pointing out the future research direction concerning the adaptive adjustment of algorithm parameters.
2 Methods and Materials
The study elaborated on the establishment of an EV discharge load model that incorporates battery loss considerations. It also presented an optimization approach for discharge strategies based on an improved GA. By leveraging simulation and optimization techniques, this method aimed to enhance the discharge efficiency of EVs, while alleviating the impact on the power grid and minimizing battery losses.
2.1 Construction of EV Discharge Load Model Considering Battery Loss
The power transmission network supplies AC form of electrical energy, while the storage devices of EVs require DC electrical energy. To achieve energy exchange between vehicles and the power network, a conversion device is required to convert the high-voltage AC power of the power network into low-voltage DC power suitable for EVs. Additionally, the low-voltage DC power of the battery can also be converted into high-voltage AC power, thereby assisting in load allocation of the power network [13, 14]. This mechanism for discharge conversion is referred to as the internal energy exchange system within EVs. The transmission path of electrical energy from the power grid to EVs is illustrated in Figure 1.
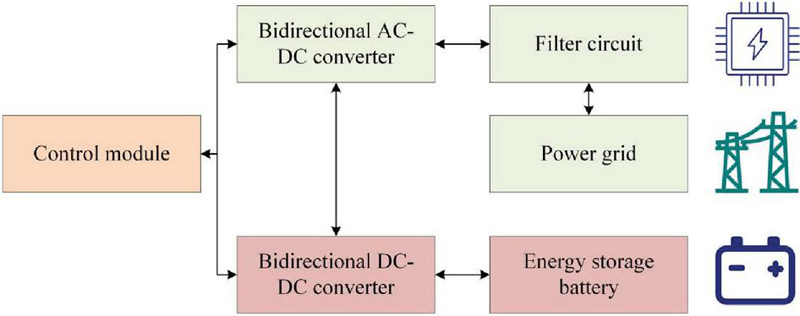
Figure 1 Architecture diagram of EV discharge system.
In Figure 1, both bidirectional AC-DC converters and bidirectional DC-DC converters can perform bidirectional power conversion. The control module manages the flow of power by controlling these two converters to ensure the effective operation of the power system. The power grid, as the source of electrical energy, undergoes preliminary processing through filtering circuits to reduce noise and interference in the current. Subsequently, the electrical energy is converted between AC and DC through a bidirectional AC-DC converter to meet the charging needs of EVs. When EVs are required to feed electrical energy back into the grid, bidirectional DC-DC converters undertake the task of transforming the low-voltage DC power from the battery into high-voltage AC power. The control module occupies a core position in the entire system, coordinating the work of various parts to ensure efficient conversion and stable transmission of electrical energy [15, 16]. When constructing a discharge load model for EVs considering battery loss, the MC analysis method is utilized. This approach estimates the frequency distribution of random events and calculates the mean value of random elements by conducting repeated random experiments, thereby enabling precise simulations of real-world scenarios. By integrating the characteristics of family cars and arbitrary discharge patterns, MC technology can construct a simulation experiment that is both realistic and in accordance with natural laws [17, 18]. The schematic diagram of the steps for estimating the overall discharge load of an EV using the MC principle is shown in Figure 2.
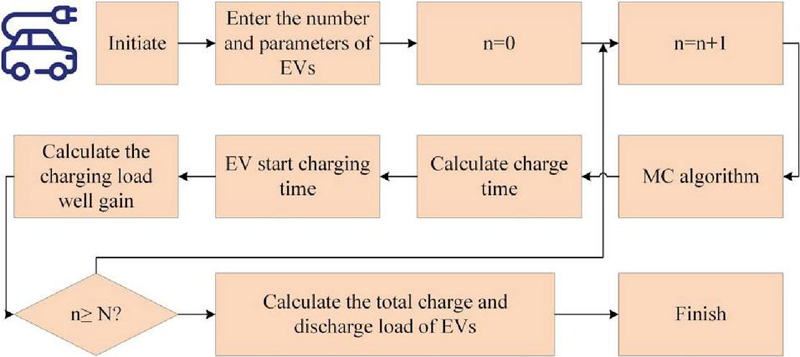
Figure 2 Flow chart of total EV discharge load calculation.
In Figure 2, the probability model of the event is first defined. For non-random occurrences, exemplified by the haphazard charging patterns of EVs, these are converted into stochastic events, and subsequently, pertinent statistical models are formulated. Subsequently, random selection is conducted within the statistical model to generate random quantities based on the previously constructed model. Afterwards, numerous simulation experiments are conducted to obtain random statistical answers to the problem. With the first two steps of operation, it is possible to generate a large amount of data for EV discharge simulation. When simulating the disorderly discharge behavior of EVs, daily mileage and return time are key factors. Through these data, the discharge load of the EV population at different time points can be calculated, and these loads can be combined with the community’s basic load to obtain the total load [19–20]. The overall discharge load is presented in Equation (1).
| (1) |
In Equation (1), refers to the total discharge power of all EVs. is the discharge power output of EV numbered at time point . represents the number of EVs involved in the calculation. The time point is divided into 96 time periods throughout the day, numbered from 1 to 96. The discharge power of a single battery set by the model is 2 kW. Therefore, if an EV is in a discharge state during a specific period , its discharge power is 2 kW; On the contrary, if the EV does not discharge during this period, its discharge power is zero.
2.2 Optimization of EV Discharge Strategy Based on Improved GA
Building upon the exploration of constructing an EV discharge load model, this study will delve further into optimizing the EV discharge strategy utilizing GA. The objective is to maximize both EV discharge efficiency and grid stability, all the while taking into account the implications of battery degradation. GA may not be efficient enough in finely searching for local optimal solutions. In the process of seeking optimization of discharge strategies for EVs, an improved GA is adopted, which demonstrated outstanding performance in handling complex multi-objective and constrained conditions [21, 22]. The improvement of GA includes the introduction of more efficient selection mechanisms, crossover and mutation strategies, and finer parameter encoding methods, thereby enhancing the algorithm’s global search capability and avoiding local optima [23]. The visual representation of chromosome crossover process in GA improvement is presented in Figure 3.
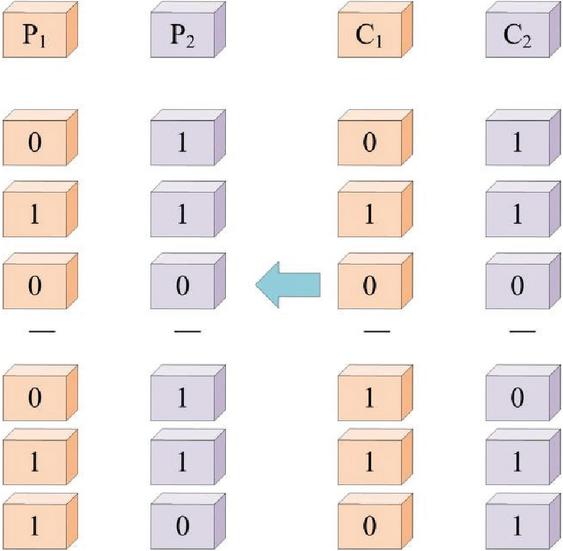
Figure 3 Visual representation of the chromosome crossing process in GA.
In Figure 3, two parental chromosomes P1 and P2 generate two offspring chromosomes C1 and C2 through crossover operation. Parental chromosome P1 is composed of gene 010, while P2 is composed of gene 110. The crossover point is located at the second gene position of two parental chromosomes. Through crossover operation, C1 obtains the first gene 0 from P1 and the last two genes 10 from P2, forming a new gene sequence 010. To ensure the diversity of GA solutions and prevent the algorithm from being prematurely fixed on non-optimal solutions, a mutation operation mechanism is introduced in the study. By making subtle random adjustments to chromosomes during algorithm execution, the variety within the population is enhanced, allowing the algorithm to escape from potential local optima and move towards the global optimum. The schematic diagram of the chromosome mutation process in GA improvement is presented in Figure 4.
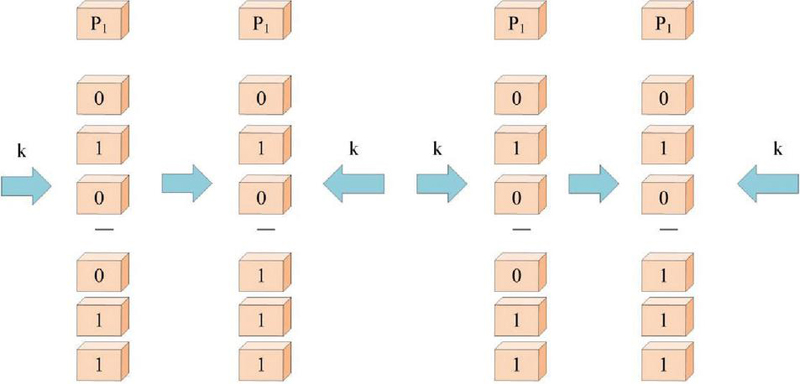
Figure 4 Chromosome mutation process.
In Figure 4, two parallel chromosomes present gene sequences 010 and 011 in their initial states, respectively. In the first step of the mutation operation, the second gene position of the first chromosome flips from 1 to 0, forming a new gene sequence 001. Subsequently, in the second step, the last two loci of the second chromosome also underwent a mutation, changing from 11 to 00, resulting in the gene sequence 001. These two mutations were instigated by mutation points denoted as k, illustrating how the mutation operation within the enhanced GA randomly alters the gene positions on chromosomes. This process introduces population diversity with a certain probability, prevents the algorithm from becoming trapped in local optima, and ultimately bolsters the genetic diversity within the population. The improved GA that integrates crossover and mutation mechanisms enhances the ability to identify global optimal solutions in a wide search space. The crossover probability is associated with an individual’s fitness value (FV). The crossover probability depends on two factors: one is the FV of the individual with lower fitness among the two individuals participating in the crossover, and the other is the ratio of the average FV of all individuals in the parent population to the minimum FV. Additionally, an adjustment parameter is introduced to regulate the crossover probability. Specifically, as shown in Equation (2).
| (2) |
In Equation (2), represents the crossover probability. indicates the current FV. is the FV of the individual with lower fitness among the two individuals participating in the crossover. indicates adjustable parameters. is the average fitness of all individuals in the parent group. is the minimum value of fitness in the parent generation. The calculation of mutation probability also takes into account the individual’s FV and the fitness statistics of the parent population, including the average fitness and minimum fitness, as presented in Equation (3).
| (3) |
In Equation (3), represents the probability of mutation. Although the improved GA performs well in global search, it may not be efficient enough in finely searching for local optimal solutions. To overcome this limitation, an Improved Genetic Algorithm combined with Simulated Annealing (IGA-SA) is proposed to optimize the discharge strategy of EVs. The IGA-SA process is shown in Figure 5.
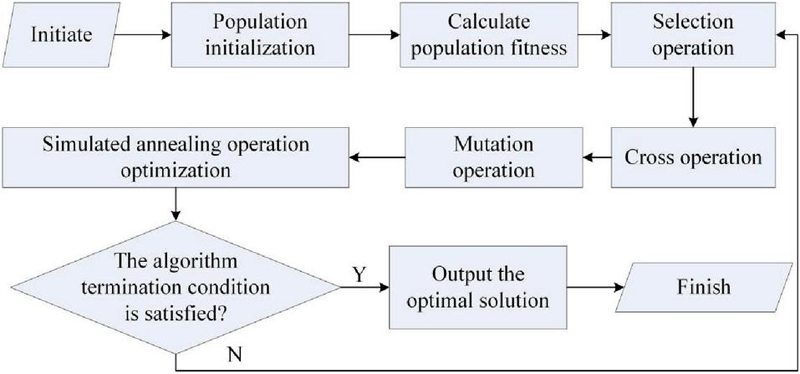
Figure 5 IGA-SA flow chart.
In Figure 5, starting from the initialization phase, the initial population is generated and its fitness is calculated. Subsequently, individuals exhibiting superior fitness are chosen via selection operations and proceed to the crossover phase, during which they generate novel offspring through the exchange of genetic material. Subsequently, mutation operations are performed to randomly adjust genes in offspring to increase the genetic variety within the population. After completing the genetic operation, the algorithm enters the SA optimization stage. At this stage, the Metropolis criterion is adopted to accept new solutions. If the new solution outperforms the current one in terms of fitness, it is immediately adopted. Conversely, if the fitness of the new solution is inferior, it may still be accepted, albeit with a probability that diminishes as the temperature decreases. The temperature update formula is shown in Equation (4).
| (4) |
In Equation (4), represents the new temperature. is the temperature attenuation coefficient, usually between 0.8 and 0.99. indicates the old temperature. The entire process iterates continuously until a satisfactory solution is attained or the designated termination condition is fulfilled. The termination criteria may encompass achieving the maximum number of iterations, attaining a specified fitness threshold, or reducing the temperature to a minimum value. Through the above steps, the hybrid method combining GA and SA can achieve a balance between global search and local search, effectively avoiding local optima and improving optimization efficiency and accuracy.
3 Results
The study presented a comprehensive performance assessment of an optimization model for EV discharge strategies, which integrates the IGA with SA. It conducted a comparative analysis of various algorithms, evaluating their performance based on discharge cost, battery degradation cost, and overall cost. Furthermore, the study scrutinized the economic implications of incorporating battery loss considerations into the discharge strategy.
3.1 IGA-SA Performance Evaluation
In the experimental research of EV discharge load model, parameter configuration is crucial for the accuracy and reliability of experimental results. The experimental parameter configuration table meticulously outlines the crucial parameters pertinent to the experiment, encompassing the fundamental attributes of EVs, their charging and discharging behaviors, GA settings, and grid-related parameters. This provides a standardized reference for configuring the experiment, thereby guaranteeing its seamless execution and the validity of the obtained results. The specific experimental parameter table is presented in Table 1.
Table 1 Experimental setting parameters table
| Parameter Name | Model/Specification | Numerical Value |
| EV | BYD Qin EV 300 | 100 units |
| Battery capacity | kWh | 30 |
| Charging power | kW | 3 |
| Discharge power | kW | 2 |
| Electricity consumption per kilometer | kWh/km | 0.15 |
| Theoretical cycle number | time | 2151 |
| Population size | / | 160 |
| Crossover probability | / | 0.65 |
| Variation probability | / | 0.01 |
| Peak-valley average hourly | Yuan /kWh | Valley time: 0.4, normal time: 0.6, |
| electricity price | peak time: 0.78 | |
| Initial charging time | / | Random, normal distribution |
| Daily mileage | / | Lognormal distribution |
In Table 1, 100 BYD Qin EV 300 EVs were selected for the experiment, each equipped with a 30 kWh battery capacity, a charging power of 3 kW, a discharging power of 2 kW, and a power consumption of 0.15 kWh per kilometer traveled. In theory, the battery can cycle and charge 2151 times. The experimental setting had a population size of 160, a crossover probability of 0.65, and a mutation probability of 0.01. The experiment adopted a peak valley equal distribution electricity price system, with a valley electricity price of 0.4 yuan/kWh, a normal electricity price of 0.6 yuan/kWh, and a peak electricity price of 0.78 yuan/kWh. The initiation time for charging EVs was randomly determined, adhering to a normal distribution pattern, whereas the daily mileage was simulated in accordance with a logarithmic normal distribution. To verify the performance of IGA-SA, it was compared with GA, Parallel Migration Genetic Algorithm (PMGA), Immune Genetic Algorithm (IgGA), and Whale Optimization Algorithm (WOA). The accuracy and recall of several algorithms are shown in Figure 6.
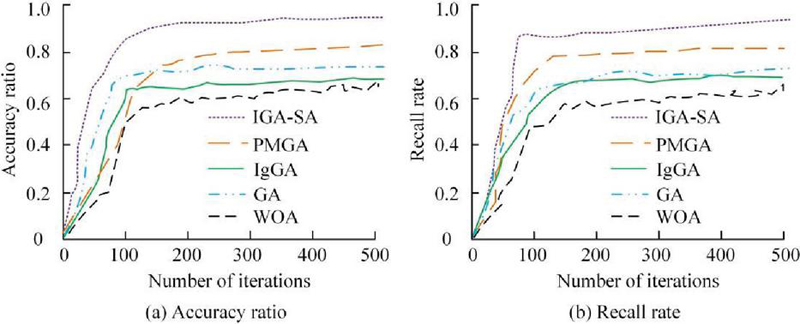
Figure 6 Comparison of accuracy rate and recall rate of algorithm.
In Figure 6(a), the accuracy of IGA-SA rapidly increased and stabilized after approximately 100 iterations, with an accuracy close to 1.0, demonstrating excellent classification performance. In contrast, although PMGA and IgGA also showed better accuracy, their growth rate and final stable value during the iteration process were slightly inferior to IGA-SA. The accuracy growth of GA and WOA was slow, and the final stable value was lower than that of IGA-SA. In Figure 6(b), the IGA-SA algorithm also demonstrated excellent performance, with a recall rate rapidly approaching 1.0 after 100 iterations, demonstrating the high efficiency of IGA-SA in identifying positive samples. The recall growth trend of PMGA and IgGA was similar to that of IGA-SA, but slightly lower. The recall rate of GA grew slowly and did not reach the level of IGA-SA after 500 iterations. WOA had the slowest recall growth rate and the lowest recall rate at the end of the iteration. IGA-SA had good stability and efficiency in handling the optimization problem of EV discharge strategy, and could quickly find optimal solutions, providing an effective optimization method for intelligent charging management of EVs. The iterative loss functions of several algorithms on different datasets are shown in Figure 7.
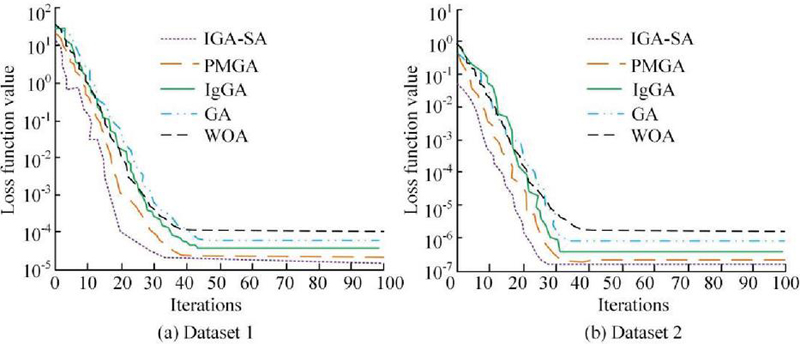
Figure 7 Iteration of loss function.
In Figure 7(a), the loss function value of the IGA-SA algorithm rapidly decreased in the initial stage, showing a fast convergence speed. After about 20 iterations, it tended to stabilize, and the final loss function value was the lowest among all algorithms, indicating its best optimization effect. In Figure 7(b), the IGA-SA algorithm also exhibited the fastest convergence speed and the lowest final loss function value, demonstrating its good generalization and optimization performance on different datasets. The performance of PMGA and IgGA on dataset 2 was similar to dataset 1, with fast convergence speed but ultimately higher loss function values than IGA-SA. The IGA-SA algorithm demonstrated superior performance in optimizing the loss function, with significant advantages over other algorithms in both the initial rapid decline and the final low loss function value. The IGA-SA algorithm had good stability and efficiency in handling optimization problems, and could quickly find optimal solutions. The average fitness and optimal fitness of IGA-SA and GA are shown in Figure 8.
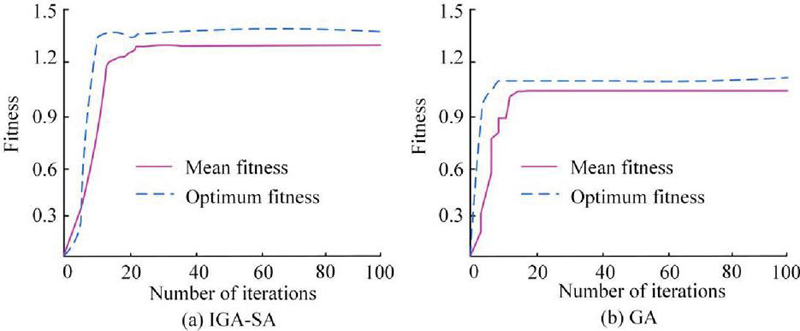
Figure 8 Average fitness and optimal fitness.
In Figure 8(a), the average fitness and optimal fitness of the IGA-SA algorithm rapidly improved with the increase of iteration counts. In the first few iterations, both showed a rapid growth trend, especially in the first 20 iterations where the improvement in fitness was particularly significant. After about 20 iterations, the optimal fitness tended to stabilize, approaching 1.5, indicating that the IGA-SA algorithm could quickly find solutions close to the optimal one. The average fitness also tended to stabilize after 20 iterations, but slightly lower than the optimal fitness, and the fitness of most individuals in the population reached a high level. In Figure 8(b), compared to IGA-SA, the growth rate of GA’s average fitness and optimal fitness was slower, especially in the first 20 iterations, where the improvement was not as significant as that of IGA-SA. After about 40 iterations, the optimal fitness of GA tended to stabilize, and the stable value was slightly lower than that of IGA-SA, with the final optimal solution quality also slightly inferior to IGA-SA. The Mean Absolute Error (MAE) and Root Mean Square Error (RMSE) of several algorithms are shown in Figure 9.
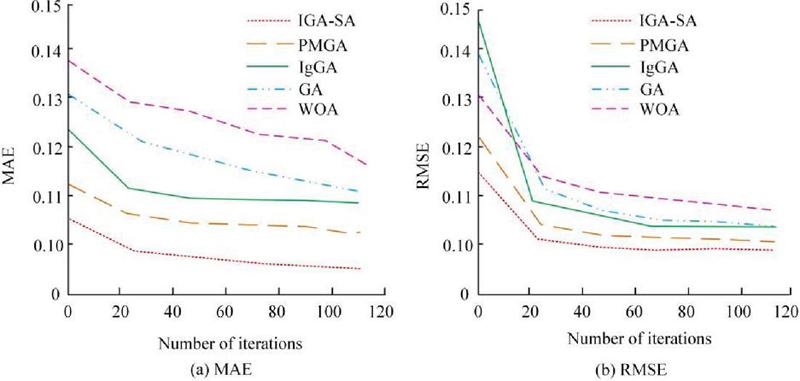
Figure 9 MAE and RMSE of several algorithms.
In Figure 9(a), the MAE value of the IGA-SA algorithm rapidly decreased in the initial stage and stabilized after approximately 20 iterations, ultimately stabilizing at around 0.10, demonstrating superiority in error control. In contrast, the decrease rate of MAE values for PMGA and IgGA was slightly slower, and the final stable value was slightly higher than that of IGA-SA. The MAE value of GA decreased slowly throughout the entire iteration process and eventually stabilized above IGA-SA. The MAE value of WOA decreased the slowest and remained at a high level at the end of the iteration. In Figure 9(b), the RMSE value of IGA-SA also rapidly decreased in the initial stage and tended to stabilize after about 20 iterations, ultimately stabilizing at around 0.10.
3.2 Evaluation of EV Discharge Strategy Based on IGA-SA and Battery Loss
In assessing the cost-efficiency of EV discharge strategies, the study conducted a thorough evaluation by contrasting the economic indicators derived from scenarios that either neglected or incorporated battery degradation considerations. The study compiled comprehensive data on the discharge cost, battery degradation cost, and total cost associated with both standard ordered discharge and ordered discharge that accounts for battery loss. Table 2 elucidates how discharge costs and battery degradation costs influence the overall economic efficiency under various strategies, as well as the selection of the optimal strategy when balancing battery health preservation and economic advantages.
Table 2 Comparison of discharge cost and battery loss cost
| Conditions | Discharge Cost (Yuan) | Battery Loss Cost (Yuan) | Total Cost (Yuan) | Battery Life (Cycles) | Grid Stability (Voltage Fluctuation) | Charging Efficiency (%) |
| Orderly discharge (regardless of battery loss) | 575 | 989 | 1565 | 1500 | 0.05 | 75 |
| Ordered discharge (considering battery loss) | 713 | 627 | 1340 | 2151 | 0.03 | 85 |
| Disordered discharge (regardless of battery loss) | 650 | 1200 | 1850 | 1200 | 0.08 | 70 |
| Disordered discharge (considering battery loss) | 800 | 900 | 1700 | 1800 | 0.06 | 78 |
| Intelligent discharge (considering battery loss and grid requirements) | 750 | 550 | 1300 | 2200 | 0.02 | 90 |
In Table 2, it was evident that when battery damage was disregarded and discharge was executed as planned, the discharge expenditure amounted to 575 yuan, whereas the battery depreciation expense reached 989 yuan, culminating in a total cost of 1565 yuan. Conversely, when battery loss was factored in, the cost of ordered discharge rose to 713.04 yuan, the battery loss cost was 627 yuan, and the aggregate cost was 1340 yuan. When assessing the discharge cost of EVs in the past, it was imperative to thoroughly consider the impact of battery loss to accurately reflect the economic benefits of the discharge process, prolong the battery’s service life, and consequently, diminish long-term operational costs. Intelligent discharge, which accounted for both battery loss and grid requirements, represented a sophisticated discharge strategy that harmonized these critical factors. The specific data were as follows: The discharge cost was 750 yuan, the battery loss cost was 550 yuan, the total cost was 1,300 yuan, the battery life cycle was 2,200 times, and the grid stability (voltage fluctuation) was 0.02. The charging efficiency was 90%. These data indicated that this intelligent discharge strategy was relatively low in terms of discharge cost, battery loss cost and total cost. Additionally, it could extend the battery’s service life, improve the stability of the power grid, and had a high charging efficiency. The total charging load, charging efficiency, and charging cost of several algorithms are shown in Figure 10.
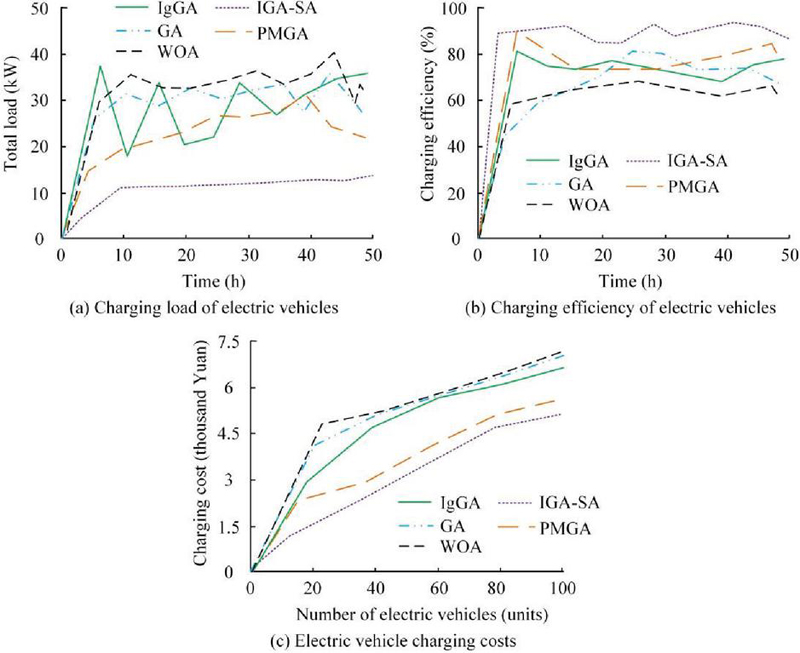
Figure 10 Total charging load, charging efficiency and charging cost.
In Figure 10(a), the IGA-SA algorithm rapidly reached a high charging load in the initial stage, around 10 kW, and then maintained stable growth until reaching about 15 kW after 50 hours. In contrast, the IgGA charging load rapidly increased to nearly 40 kW in the first 10 hours, and then showed a fluctuating downward trend. The charging load of GA and PMGA fluctuated significantly throughout the entire time period, while WOA exhibited a relatively stable but lower charging load. In Figure 10(b), the charging efficiency of the IGA-SA algorithm was the most outstanding among all algorithms, maintaining above 90% from the beginning and slightly improving throughout the entire 50 hours, ultimately approaching 100%. The charging efficiency of IgGA and GA remained between 70% and 80% for most of the time, while the charging efficiency of PMGA and WOA was relatively low and fluctuated greatly. In Figure 10(c), the charging cost of the IGA-SA algorithm was the lowest among all algorithms and gradually increased with the increase in the number of EVs, but the growth rate was relatively small. The IGA-SA algorithm demonstrated significant advantages in EV charging management. It not only achieved high charging efficiency quickly but also maintained high stability and low charging costs throughout the entire charging process.
4 Conclusion
The research aims to improve grid stability and battery life while reducing operating costs by optimizing the discharge strategy of EVs. A discharge load model for EVs considering battery loss was developed, and an improved GA was applied to optimize the discharge strategy. This algorithm simulated the evolution process in nature, combines crossover, mutation and other operations to find the optimal discharge strategy, and introduced SA algorithm to improve the refinement of local search. The research findings revealed that, when compared to the discharge strategy that did not take battery loss into account, the ordered discharge strategy incorporating battery loss considerations led to a reduction in total cost from 1,565 yuan to 1,340 yuan, with both the discharge cost and battery degradation cost experiencing a decline. The average fitness and optimal fitness of the IGA-SA algorithm rapidly improved with the increase in iteration times. After about 20 iterations, the optimal fitness tended to stabilize, approaching 1.5, indicating that the IGA-SA algorithm could quickly find solutions close to optimal. The improved GA demonstrated excellent performance in optimizing discharge strategies for EVs, with faster convergence speed and higher optimization efficiency compared to traditional GA and other evolutionary algorithms. However, the construction of the discharge load model has not yet considered all factors that may affect the discharge behavior of EVs, such as climatic conditions, driving behaviors, etc. Future research can explore the adaptive adjustment mechanism of algorithm parameters to improve the generalization ability and robustness of the algorithm.
Fundings
The research is supported by 2022.7.1-2025.7.1 Scientific and Technological Research Program of Chongqing Municipal Education Commission:Research on State of Charge Estimation and Health Status Diagnosis of Vehicle Power Batteries. (Grant No. KJQN202203411) The research results are funded by the Science and Technology Research Project of the Chongqing Municipal Education Commission.
References
[1] Haq K U, Bakhsh F I, Sekhar O C. Improved Performance of Dual Active Bridge Converter using Particle Swarm Optimization based Phase Shift Modulation for EV Application. Distributed Generation & Alternative Energy Journal, 2025, 40(02): 361–400.
[2] Wang Y, Zhou Y, Luo Q. Parameter optimization of shared electric vehicle dispatching model using discrete Harris hawks optimization. Mathematical biosciences and engineering: MBE, 2022, 19(7):7284–7313.
[3] Benedikt P. Consideration of Damaging Frequency Ranges of Structural Excitation for Testing Large Battery Packs in Battery Electric Vehicles (BEV). Journal of Technology & Innovation, 2023, 3(2): 69–79.
[4] Comert S E, Yazgan H R. A new approach based on hybrid ant colony optimization-artificial bee colony algorithm for multi-objective electric vehicle routing problems. Engineering Applications of Artificial Intelligence: The International Journal of Intelligent Real-Time Automation, 2023, 123(Pt. B):106375-1–106375-24.
[5] Xie S, Du F. Design of Hybrid Power System for Hydrogen Fuel Cell and Electric Vehicle. Distributed Generation & Alternative Energy Journal, 2025, 40(01): 141–164.
[6] Xu F, Zhang W. Research on the Optimal Location of Urban Electric Vehicle Charging Stations Based on the Whale Optimization Algorithm in the Context of Green Energy. Distributed Generation & Alternative Energy Journal, 2025, 40(01): 193–212.
[7] LI Lin-hui, ZHANG Xin-liang, LIAN Jing, ZHOU Ya-fu. Optimization of Power Consumption Algorithm for Pure Electric Vehicle Under the Influence of Multiple Factors. Journal of Northeastern University (Natural Science), 2022, 43(2):228–235.
[8] Vani B V, Kishan D, Ahmad M W, Reddy B N K. An efficient battery swapping and charging mechanism for electric vehicles using bat algorithm. Computers and Electrical Engineering, 2024, 118(Pt. A):109357–109388.
[9] Lyu F Y, Zhan Z F, Zhou G L, Wang J, Li J, He X. Improved genetic algorithm based on reinforcement learning for electric vehicle front-end structure optimization design. Advances in Manufacturing, 2024, 12(3):556–575.
[10] Jassim A A, Karam E H, Ali M M E. Design and optimization of two-stage controller for three-phase multi-converter/multi-machine electric vehicle. Open Engineering, 2024, 14(1):523–532.
[11] Du W, Ma J, Yin W. Orderly charging strategy of electric vehicle based on improved PSO algorithm. Energy, 2023, 271(May 15):127088.1–127088.7.
[12] Alhussan A A, Khafaga D S, El-Kenawy E S M, Eid M M, Ibrahim A. Urban Electric Vehicle Charging Station Placement Optimization with Graylag Goose Optimization Voting Classifier. Computers, Materials & Continua, 2024, 80(7):1163–1177.
[13] Bogrekci I, Demircioglu P, Ozer G. Autonomous Underwater Vehicle Design and Development: Methodology and Performance Evaluation. Journal of Automation, Mobile Robotics and Intelligent Systems, 2024, 18(4):47–61.
[14] Wei X, Niu C, Zhao L, Wang Y. Combination of ant colony and student psychology based optimization for the multi-depot electric vehicle routing problem with time windows. Cluster Computing, 2025, 28(2):1–25.
[15] Shao M, Yin X. Multi-objective optimal coordination of electric vehicle charging, power grid, energy storages and renewables. Journal of cleaner production, 2024, 474(Oct. 5):1–15.
[16] Drallmeier J A, Nazari S, Solbrig R S J. Intelligent Setpoint Optimization for a Range Extender Hybrid Electric Vehicle with Opposed Piston Engine. Journal of Dynamic Systems, Measurement, and Control, 2024, 146(2):1–11.
[17] Arivalahan R, Balaji S. An optimization framework for capacity allocation and energy management of fast electric vehicle charging stations-wind photovoltaic energy using artificial transgender longicorn algorithm. International Journal of Energy Research, 2022, 46(11):14827–14844.
[18] Abedini M. A novel controller algorithm to improve stability of power system based on a hybrid of fuzzy controller and Gray wolf optimization by coordinating PSS and TCSC with considering uncertainty. Soft Computing, 2024, 28(23):13225–13243.
[19] Guo R, Shen W. A Model Fusion Method for Online State of Charge and State of Power Co-Estimation of Lithium-Ion Batteries in Electric Vehicles. IEEE Transactions on Vehicular Technology, 2022, 71(11):11515–11525.
[20] Sowmya R, Sankaranarayanan V. Optimal Scheduling of Electric Vehicle Charging at Geographically Dispersed Charging Stations with Multiple Charging Piles. International journal of intelligent transportation systems research, 2022, 20(3):672–695.
[21] Salimi H, Ouadi H, Borhani A. Genetic algorithm for sizing optimization of the EV chargers in a smart building. ifac papersonline, 2022, 55(12):414–419.
[22] Gheisari M, Hamidpour H, Liu Y, Saedi P, Raza A, Jalili A, Rokhsati H, Amin R. Data Mining Techniques for Web Mining: A Survey. Artificial Intelligence and Applications, 2023, 1(1): 3–10.
[23] Banerjee S, Roy P K, Saha P K. A novel enhanced performance-based differential search algorithm for the optimization of multiple renewable energy sources-based hybrid power system. Energy, Ecology and Environment, 2024, 9(6):656–679.
Biographies

Yinquan Hu received the Doctoral degree in electrical engineering from Chongqing University in 2013. His research interests include power electronics and power transmission, electric vehicle drive control, and power battery charging, discharging, and capacity detection.

Heping Liu Doctoral supervisor and professor of the School of Electrical Engineering, Chongqing University. His research interests include electric power transmission, electric vehicles, automotive electronics, intelligent test instruments, and online applications of microcomputers in power systems.
Distributed Generation & Alternative Energy Journal, Vol. 41_1, 123–144
doi: 10.13052/dgaej2156-3306.4116
© 2026 River Publishers