Research on Path Planning of Power Operation Robot Based on Improved SMA Method
Longxue Cheng1, 2,*, Yupeng Li1, 2, Longfei Yue1, Litao Sun1 and Xianxia Liang1
1Department of Electrical Engineering, Hebei Institute of Mechanical and Electrical Technology, Xingtai 054000, China
2Xingtai Technology Innovation Centre for Multi-Sensor Fusion and Intelligent IoT Electronic Product, Xingtai 054000, China
E-mail: longxuec@yeah.net
*Corresponding Author
Received 24 April 2025; Accepted 21 May 2025
Abstract
To address the limitations of the slime mould algorithm (SMA) in power operation robot path planning, such as long path lengths, excessive search time, and uneven paths, this paper proposed an improved SMA, which called as ISMA. Firstly, PWLCM chaotic mapping is utilized to generate the population, enhancing its heterogeneity. Next, an adaptive mutually beneficial symbiosis strategy is introduced to refine the slime mould’s location update process, balancing global search and local exploitation. Finally, a convex lens imaging strategy is adopted to improve position updates, helping the algorithm escape local optima. When evaluating path length, operation time, and safety rate, the proposed ISMA outperforms both the ACO and classical SMA by achieving shorter path lengths and fewer collisions.
Keywords: PWLCM chaotic mapping, adaptive mutually beneficial symbiosis strategy, convex lens imaging strategy, power operation robot, path planning.
1 Introduction
With the increasing demand for electricity in modern society, the scale and complexity of power system are expanding, and the operation and maintenance of power facilities are facing unprecedented challenges. Especially in high-risk operations such as power inspection, equipment maintenance and fault diagnosis, traditional manual operation fails to ensure high efficiency, safety and accuracy. Therefore, intelligent electric power operation robot came into being, which has become an important technology to improve the automation level of power system, ensure operation safety and improve operation efficiency. Electric robot can perform high-risk tasks such as inspection, maintenance and fault detection instead of manual work under high pressure, high temperature and bad weather conditions. Its wide application not only significantly reduces manual intervention and the risk of power accidents, but also improves the accuracy and efficiency of inspection and maintenance. However, when performing tasks, electric robots often need to walk flexibly in complex environments, which requires relying on accurate, efficient and safe path planning algorithms to provide reliable travel routes for robots.
Path planning is a core problem in robot intelligence, which involves how to avoid obstacles, reduce energy consumption, avoid collision with other equipment and finally reach the target point in uncertain environment. In the application scene of electric robot, the dynamic change of environment, the complex layout of obstacles, energy consumption and other issues make path planning particularly complicated. As a result, designing an efficient method is a key technique in electric robot research.
In the field of electric robots, path planning realizes obstacle avoidance and efficient operation of robots. Traditional methods, including Dijkstra [1], A* [2], PRM [3] and RRT [4], are widely used in power inspection, maintenance, equipment inspection and other tasks of electric robots, especially in the static environment, the complete path can be found quickly and effectively. However, the limitations of these traditional algorithms are gradually exposed, especially in the complex and dynamic power operation environment, they may not meet the requirements of high efficiency, real-time and security. Therefore, in view of the shortcomings of traditional algorithms, many researchers began to explore new methods and technologies to meet the challenges in complex electric power working environment.
Recently, the introduction of heuristic group intelligent optimization algorithm provides a new solution for path planning, which can perceive environmental information in real time and dynamically adjust path planning strategy, thus adapting to the changes of complex environment. At the same time, artificial intelligence algorithm can comprehensively consider multiple objectives, such as shortest path, obstacle avoidance effect and calculation time, and optimize the path planning effect, especially in complex power operation environment, which can greatly enhance operational efficiency and safety. The application of optimization method provides an improvement direction for traditional path planning methods, such as the PSO, ACO and slime mould algorithm (SMA). Through multi-objective optimization, these algorithms can not only solve the shortest path problem, but also comprehensively consider many factors including path smoothness, operation consumption. The optimization methods can provide more reasonable path planning under complex constraints in power operation environment, especially suitable for finding the optimal path in a large-scale search space.
Slime mould algorithm is a novel approach [5], which is developed by the characteristic of slime moulds when looking for food sources, and can construct an optimized path or network structure in a complex environment through self-organization to find the shortest path. SMA, with its simple calculations, is employed in function optimization and other fields. However, SMA also has some shortcomings, including a tendency to get stuck in local optima, which leads to its inability to find the global optimal path in complex search space. Therefore, based on prior research, this paper proposes a new SMA variant method (ISMA). By using a variety of advanced strategies to improve SMA and apply it to the path planning of electric robot, the working time of electric robot is effectively shortened and its working efficiency is improved.
The primary contributions of this paper include:
1. The ISMA is innovatively proposed to solve the path planning problem of the power operation robot.
2. PWLCM chaotic mapping method is used to initialize the slime mould population and improve the quality of the initial solution of the algorithm.
3. An adaptive mutually beneficial symbiosis strategy is proposed to improve the slime mould location during the wrap food phase, and balance the global search and local excavation capabilities.
4. Convex lens imaging strategy is employed to modify the slime mould location during the grabble food phase, and enhance the capability for escaping local optima.
2 Related Work
When performing patrol inspection, maintenance, installation and other tasks, electric robot usually needs accurate guidance in complex power facilities. Therefore, researchers have conducted extensive research on the traditional algorithms to address the path planning challenges of electric robot. Luo et al. [6] put forward a modified Dijkstra, which is modeled by triangles, By solving the optimal path channel, the shortest route among all the optimal paths can be obtained, which improves the routing accuracy. Wang et al. [7] present an improved path planning algorithm based on Dijkstra incorporating odometer sensors, which combines the statistical characteristics of dead reckoning positioning error, and distributes the path points evenly in the search space. Lin et al. [8] put forward an optimized A-star, which aims to provide shorter and less inflection points for field disaster relief tasks on unstructured roads. By setting redundant safety spaces, impassable narrow roads are eliminated, thus avoiding collisions between vehicles. Adopting the safe corridor method to optimize the driving path and reduce repeated inspection and correction, thus saving calculation time, which can plan a shorter and smoother route and effectively prevent collisions between vehicles and obstacles.
With the aim of improving the application effect of unmanned surface vehicle in marine environmental monitoring, Zhang et al. [9] present an improved A-star, using a grid-based environment model, and incorporating two-way search and optimized node traversal, which enhances the path planning efficiency, resulting in fewer inflection points and crossing nodes. Thus ensuring a high success rate, fast planning, dynamic obstacle avoidance and shortest path, Liu et al. [10] proposed an improved method based on hierarchical planning. By introducing D algorithm into the network construction and planning process of PRM, the performance of PRM in dynamic obstacle avoidance was improved. The experimental results show that the proposed PRM-D method is superior to other methods in time efficiency of static and dynamic planning when simulating on maps with different complexity, and can successfully complete navigation tasks in actual scenes. For the purpose of solving the problems of PRM algorithm, Li et al. [11] introduced a strategy to enhance road map construction efficiency, resulting in a path that better aligns with vehicle driving requirements. Then, the improved PRM algorithm shows significant advantages in road map construction speed, path planning efficiency and path length, which verifies its effectiveness and correctness. To overcome the limitations of memory and time consumption, Chi et al. [12] proposed NRRT*, where the A-Star generates the model to guide the sampling process, and simulations demonstrate that NRRT* reduces time cost and memory usage through non-uniform sampling, achieving better performance across various scenarios. Qi et al. [13] proposed MOD-RRT*, along with an initial path optimization method that enables re-planning when the path becomes infeasible. By quickly selecting the best path from multiple candidate nodes, taking into account the path length and smoothness, a higher quality initial path can be generated and unknown obstacles can be effectively avoided.
In recent years, swarm intelligence optimization algorithm has been widely applied, showing unique advantages in solving complex optimization problems, and with the increasingly complex scenarios, the role of swarm intelligence algorithm has become increasingly indispensable. In order to solve the problem that it is difficult for ant colony optimization algorithm to balance efficiency and optimization effect between distance heuristic function and transfer function, Chen et al. [14] proposed enhanced ACO, where agents plan their paths based on odor signals. The test results on a variety of complex maps show that the algorithm performs well in path discovery quality and convergence speed, and can maintain excellent performance even in high-resolution grid environment. Cai et al. [15] introduced an improved ACO that integrates the firefly algorithm to optimize the heuristic function. The experimental results show that the improved algorithm effectively shortens the path planning time and reduces the average path length, showing good performance. For the purpose of solving the path planning problem of autonomous mobile robot in static and dynamic environment, Fatin et al. [16] proposed an improved particle swarm optimization (PSO-MFB), which can detect and correct infeasible points and convert them into feasible solutions by optimizing the path, minimizing the distance and ensuring the smooth path. At the same time, this method has the function of obstacle detection and avoidance, which effectively avoids collision with obstacles and overcomes the limitations of the traditional grid method. Marcus et al. [17] present optimized genetic algorithm, which considered the influence of texture changes in the environment on energy demand. By introducing specific genetic operators and active search algorithm, the bypass path of each obstacle was calculated in the preparation stage, and the results were used to optimize the final path, which finally proved the effectiveness and applicability of the method. So as to solve the problems of uncertainty and lack of transparency caused by battery capacity limitation, Christian et al. [18] introduced an energy management model, which aims to generate an optimized path, minimize energy consumption, and consider the influence of obstacles, and at the same time, it can accurately predict energy and time requirements and effectively improve resource utilization efficiency.
3 Classical SMA Method
Slime mould algorithm is a random optimization method, which simulates the three stages of slime mould food search process. The slime mould wave model, based on bio-oscillators, seeks optimal solutions by adjusting weights, thereby selecting different updating strategies. However, the updating process based on random search leads to poor population diversity. Then, the selection of random individuals may cause the algorithm to converge to a local optimum.
3.1 Approach Food
When conditions are met, the search weight is relatively large, so it will turn to other areas for exploration, which is expressed as follows:
| (1) |
Where, stands for the best position currently obtained. and represent the control coefficient that linearly decreases from 1 to 0. other areas for exploration.
| (2) |
Where, represent the control coefficient. stands for selector switch.
| (3) |
Where, indicates the weight coefficient. By sorting the fitness values, it is expressed by the formula as follows:
| (4) |
Where, sort (S) stands for the ranking function of population fitness value.
3.2 Wrap Food
The wrap food stage is a quality adjustment method, where the search weight of this area is redistributed to other areas, and its location update strategy is expressed as follows:
| (5) |
Where, represents the random value. stands for switching probability, which determines whether SMA explores other food sources or searches around the best individual.
3.3 Grabble Food
In the grabble stage, surrounding food randomly floats towards and gradually decreases with each iteration, eventually reaching 0. The position update in the grabble stage is given by the following formula:
| (6) |
Where, represents the optimized position of slime mould in the grabble stage. represents the weight coefficient.
4 Improved SMA Method
4.1 PWLCM Chaotic Mapping
SMA generates the initial population in a random way within the set position lower boundary and upper boundary, which may result in poor uniformity distribution, causing premature convergence. Unlike pseudo-random number generation, chaotic mapping produces chaos, combining ergodicity, randomness, and regularity. Combining with chaotic mapping sequence for population initialization, more uniform population distribution can be obtained, population diversity can be improved.
At present, Logistic, Tent, PWLCM and other chaotic mapping mechanisms are commonly used. However, Logistic chaotic mapping has obvious insufficient distribution and uniformity, which is easy to reduce the optimization accuracy of the algorithm. Although Tent chaotic mapping is more ergodic than Logistic chaotic mapping, it has the characteristics of small period and fixed point, which will make some individuals fall into the fixed point period and make the mapping sequence tend to be stable, thus leading to the loss of randomness. In contrast, PWLCM chaotic mapping [19] is a kind of Piewise chaotic mapping model with good overall performance for the sequence of the machine. It is essentially a Piecewise mapping function with the initial position as the piecewise index, which is more stable than Logistic and Tent chaotic mapping, and basically consistent with Tent chaotic mapping in uniformity. The initial population individual distribution can cover the search space to the greatest extent, and prevent stagnation during algorithm iteration. In this paper, the improved SMA incorporates PWLCM chaotic mapping to initialize the population, as expressed below:
| (7) |
Where, is a chaotic sequence generated by PWLCM chaotic mapping. is the random location of chaotic mapping. is the subsection control coefficient, and when , the chaotic sequence has better ergodicity. The chaotic sequence is generated by PWLCM chaotic mapping, and the initial position of slime mould population is calculated, which is expressed by the following formula:
| (8) |
Where, is the optimized individual position of slime mould population. is the upper bound of slime mould population, and is the lower bound of slime mould population.
4.2 Mutually Beneficial Symbiosis
The randomly selected slime mould location update is random, which may lead to blind search and reduce the optimization accuracy. The location updating method of mutually beneficial symbiosis algorithm [20] after interaction are expressed as follows:
| (9) |
Where, is the optimal individual. and are interest factors, and the choice of 1 or 2 indicates that it may benefit partially or completely. represents the interaction.
Considering that there is a strong knowledge exchange between two individuals in the mutually beneficial stage of SOS, this paper will interact with the current individual and randomly selected individuals, and add the best slime mold to guide the search. On this basis, the inertia weight is introduced, and an improved search strategy in the exploration stage is proposed, which is expressed as follows:
| (10) |
Where, is a randomly selected slime mould position. is the benefit factor. is the inertia weight, which is defined by the following formula:
| (11) |
When and , the test effect of the algorithm is the best.
According to the formula, the improved optimal position of slime mould moves to the vicinity of the current position guided by the interaction . Through the interaction and the guidance of the optimal slime mould, the information exchange between individuals and other individuals is more abundant, and slime mould will explore the global optimal position according to the collected information in the exploration stage, thus avoiding the blind search caused by random selection. The nonlinear decreasing inertia factor enables the algorithm to search in a wide range in the early stage of exploration, narrow the search range in the late stage of exploration, and accelerate the convergence speed.
4.3 Convex Lens Imaging
To enhance search performance, the convex lens imaging inversion strategy is employed to update the target [21]. The principle is that there is a point with height in space, which is after X-axis mapping and is regarded as the global optimum. A convex lens with center and focal length is placed in the center, and the point is mapped by convex lens to get a point with height , then the mapped individual is generated, and the principle of convex lens imaging is shown in Figure 1.
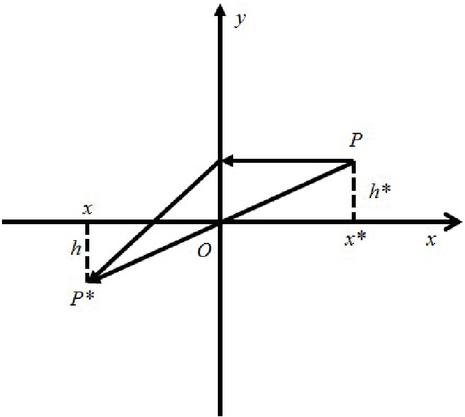
Figure 1 Convex lens imaging schematic.
Furthermore, to maximize the effectiveness of the convex lens inversion strategy, the step size is increased and the foraging search range is expanded during the initial iterations, thereby improving performance and accelerating the process, which is expressed as follows:
| (12) |
It is introduced to disturb the feeding slime mould population, so as to enhance the population diversity and improve the possibility of the algorithm jumping out of the local optimum, which is expressed as follows:
| (13) |
Where, is the component of the current individual in the j-th dimension.
is the inverse solution. is the corresponding proportional relationship between objects and images. Finally, a probability selection strategy of target location update is developed. When the target random value exceeds 0.5, it is used to update the slime mould location, which is expressed as follows:
| (14) |
Where, is a random number conforming to Gaussian distribution. is a random vector. is the current global optimal value.
5 Simulation Experiments
5.1 Scenes Design
Two working maps are designed to validate its effectiveness, and all methods in this simulation experiment are carried out under the same conditions, and ACO algorithm, traditional SMA and ISMA are utilized to plan the routes. In the simulation experiment of this paper, the population size is set to 50, with 400 iterations. The two working maps designed are described in Figure 2.
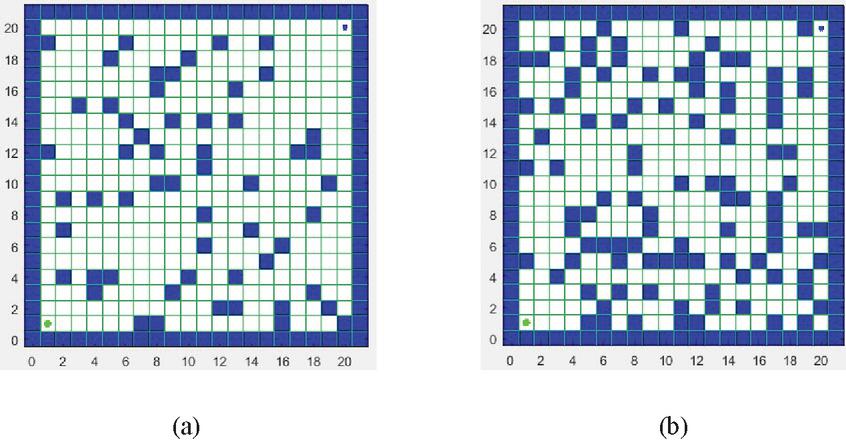
Figure 2 Two working maps: (a) working map 1; (b) working map 2.
Where, the scale of the two working map is 20 m 20 m, the white area represents the feasible area, and the deep blue area represents the obstacles. The starting coordinates of the power operation robot are (1, 1) and the ending coordinates are (20,20).
5.2 Comparison Results
Path planning of power operation robot is a key aspect to ensure its efficiency and safety during deployment, and plays a key role in determining the most efficient and effective route for the robot, avoiding obstacles and reducing machine wear. Therefore, in this paper, simulation experiments are carried out in different working maps, and the ACO and traditional SMA are selected for comparative simulation experiments to validate its effectiveness. In working map 1, the ACO, traditional SMA and proposed ISMA are used to plan the path of power operation robot, and the results are depicted in Figure 3.
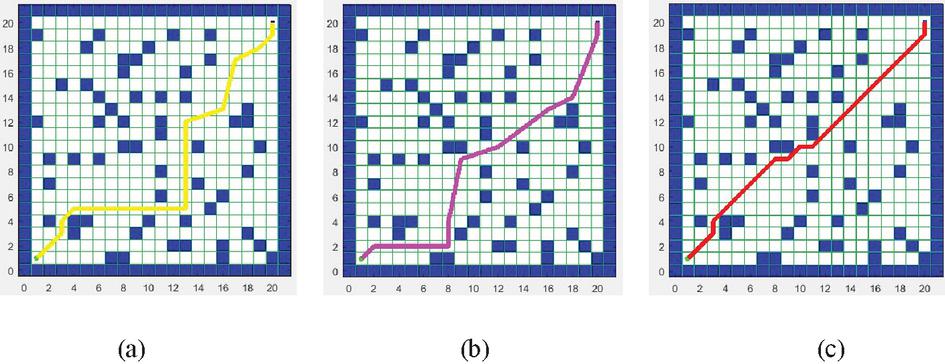
Figure 3 Results of the algorithms in working map 1: (a) ACO; (b) SMA; (c) ISMA.
The ACO and traditional SMA are selected to compare with the proposed ISMA for experimental analysis of convergence curves. Through repeated experiments on these algorithms in the same test environment, the performance of path planning in each iteration is recorded, as drawn in Figure 4.
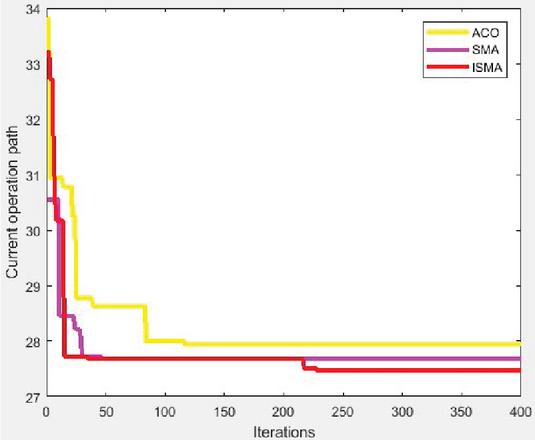
Figure 4 Convergence curves of ACO, SMA, and ISMA on working map 1.
As can be seen from the figure, when the three algorithms plan the path of the power operation robot in the working map 1, the proposed ISMA can quickly find a relatively good path solution in the initial stage, showing a faster convergence speed. In addition, the proposed ISMA can avoid the local optimal solution more effectively through the improvement of PMLCM chaotic mapping, mutually beneficial symbiosis strategy and convex lens imaging in subsequent iterations. Therefore, the convergence accuracy of proposed ISMA is high, and the final optimized path length is obviously better than the ACO and traditional SMA.
To further validate its generalization, the path planning of power operation robot is carried out in the working map 2. Obviously, the working map 2 is more complicated than working map 1, and contains more dynamic obstacles and irregular terrain, which makes the task of path planning more challenging. In such environments, traditional path planning algorithms often struggle, as they may get trapped in local optima, leading to inefficiency and poor robustness in handling complex obstacles. Then, the ACO, traditional SMA and the proposed ISMA is utilized to plan operation path in the working map 2, which are shown in Figure 5.
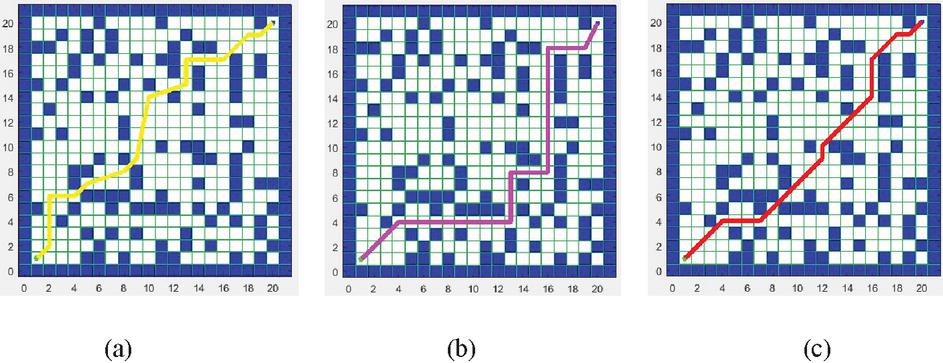
Figure 5 Results of the algorithms in working map 2: (a) ACO; (b) SMA; (c) ISMA.
As can be seen from the figure, the proposed ISMA effectively reduces the total path length of the power operation robot in the working map 2 through intelligent search and optimization strategy, which means that the robot can complete the task in a short time, thus improving the work efficiency. In addition, the proposed ISMA reduces turning points, enhancing the path’s smoothness and stability.
To better assess its convergence and clearly observe the convergence rates and optimization effects, then the experimental analysis of convergence curves with ACO and SMA is carried out in working map 2. After repeated iterations under the same environmental conditions, the path optimization results after each iteration are drawn, and the convergence curves of three algorithms are formed in Figure 6.
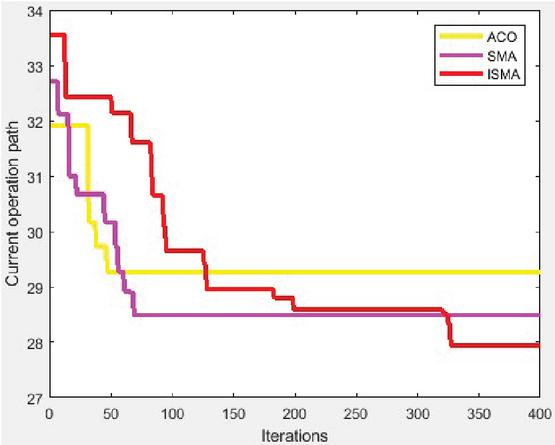
Figure 6 Convergence curves of ACO, SMA, and ISMA on working map 2.
When three algorithms plan operation path in the working map 2, the proposed ISMA can quickly identify a more reasonable path area, which can effectively avoid the trouble. With iterations, ISMA gradually converges and maintains high accuracy, and its optimization effect is obviously better than the ACO and SMA.
To highlights the advantages of the proposed ISMA in path planning, comparing the results of ACO, SMA and ISMA in working map 1 and working map 2, and comprehensively evaluates their performance in multiple indicators. By summarizing these data, we can more intuitively understand the differences between the three algorithms in actual path planning. Specifically, the planning results of the three algorithms in several key performance indicators such as path length, operation time and path safety rate are illustrated in Table 1.
Table 1 Performance comparison of related algorithms
| Metrices | ||||||
| Working Map 1 | Working Map 2 | |||||
| Route | Operation | Safety | Route | Operation | Safety | |
| Algorithms | Length(m) | Time(s) | Rate(%) | Length(m) | Time(s) | Rate(%) |
| ACO | 32.47 | 17.28 | 49.52 | 36.26 | 19.18 | 57.59 |
| SMA | 30.53 | 12.87 | 57.14 | 33.21 | 15.64 | 60.14 |
| ISMA | 27.28 | 7.24 | 78.68 | 28.67 | 8.83 | 81.36 |
Compared to the traditional SMA, the path planning length of the proposed ISMA on the working map 1 and the working map 2 is reduced by 10.64% and 13.67% respectively, which shortens the working length of the power operation robot, reduces the traveling distance required by the robot in the process of performing tasks, and improves the working efficiency. In addition, the operation time of the proposed ISMA is reduced by 43.74% and 43.54% respectively, and the path safety rate is increased by 27.32% and 26.08% respectively, which shows that the proposed ISMA is particularly prominent in the face of complex environment, and it can quickly converge to the optimal solution through fewer iterations, effectively reducing the risk of collision with obstacles, and has better path planning performance.
6 Conclusion
In this study, an optimized SMA (ISMA) for power operation robots path planning is presented. Firstly, PWLCM chaotic mapping is employed to modify the slime mould population, enhancing the initial solution quality. Next, an adaptive mutually beneficial symbiosis strategy is proposed to improve the position update mode of slime mould in the wrap food stage, balancing global search and local exploration capabilities. Finally, Convex lens imaging strategy is utilized to enhance the slime mould location in the grabble food stage, and enhancing the capacity to avoid local optima. The proposed ISMA is simulated in working map 1 and working map 2, and the results show that when compared with the ACO and classic SMA, the trajectory length and operation time of ISMA are reduced by 12.15% and 43.64% respectively, and the safety rate is increased by 26.7% on average. While the ISMA has been evaluated through simulation, future work should apply it to real-world power operation robots to validate its effectiveness.
Potential Conflicts of Interest
The author declares that there is no potential conflict of interest.
Funding Information
This paper was supported by Key Research and Development Plan Self Funded Project of Xingtai, Hebei Province in 2021 “Research on Indoor Mobile Robot Localization Algorithm Based on Multi Sensor Fusion” (No:2021ZC010).
Acknowledgments
The author thanks the anonymous reviewers for their valuable comments and the support of Xingtai Technology Innovation Center for Multi-Sensor Fusion and Intelligent IoT Electronic Product.
Research Involving Human Participants and/or Animals
Not Applicable.
Informed Consent
The author unanimously agreed to the revision and publication of the manuscript.
Data Availability
Not applicable.
References
[1] A. R. Soltani, H. Tawfik, J. Y. Goulermas, and T. Fernando, “Path planning in construction sites: performance evaluation of the Dijkstra, A*, and GA search algorithms,” Advanced engineering informatics, vol. 16, no. 4, pp. 291–303, 2002.
[2] S. M. Persson and I. Sharf, “Sampling-based A* algorithm for robot path-planning,” The International Journal of Robotics Research, vol. 33, no. 13, pp. 1683–1708, 2014.
[3] S. Kumar and A. Sikander, “A modified probabilistic roadmap algorithm for efficient mobile robot path planning,” Engineering Optimization, vol. 55, no. 9, pp. 1616–1634, 2023.
[4] O. Salzman and D. Halperin, “Asymptotically near-optimal RRT for fast, high-quality motion planning,” IEEE Transactions on Robotics, vol. 32, no. 3, pp. 473–483, 2016.
[5] S. Li, H. Chen, M. Wang, A. A. Heidari, and S. Mirjalili, “Slime mould algorithm: A new method for stochastic optimization,” Future Generation Computer Systems, vol. 111, pp. 300–323, 2020, doi: 10.1016/j.future.2020.03.055.
[6] M. Luo, X. Hou, and J. Yang, “Surface Optimal Path Planning Using an Extended Dijkstra Algorithm,” IEEE Access, vol. 8, pp. 147827–147838, 2020, doi: 10.1109/access.2020.3015976.
[7] C. Wang, C. Cheng, D. Yang, G. Pan, and F. Zhang, “Path planning in localization uncertaining environment based on Dijkstra method,” Frontiers in Neurorobotics, vol. 16, p. 821991, 2022.
[8] Z. Lin, K. Wu, R. Shen, X. Yu, and S. Huang, “An Efficient and Accurate A-star Algorithm for Autonomous Vehicle Path Planning,” IEEE Transactions on Vehicular Technology, 2023.
[9] H. Zhang, Y. Tao, and W. Zhu, “Global path planning of unmanned surface vehicle based on improved A-Star algorithm,” Sensors, vol. 23, no. 14, p. 6647, 2023.
[10] C. Liu et al., “PRM-D* method for mobile robot path planning,” Sensors, vol. 23, no. 7, p. 3512, 2023.
[11] Q. Li, Y. Xu, S. Bu, and J. Yang, “Smart vehicle path planning based on modified PRM algorithm,” Sensors, vol. 22, no. 17, p. 6581, 2022.
[12] J. Wang, W. Chi, C. Li, C. Wang, and M. Q.-H. Meng, “Neural RRT*: Learning-based optimal path planning,” IEEE Transactions on Automation Science and Engineering, vol. 17, no. 4, pp. 1748–1758, 2020.
[13] J. Qi, H. Yang, and H. Sun, “MOD-RRT*: A sampling-based algorithm for robot path planning in dynamic environment,” IEEE Transactions on Industrial Electronics, vol. 68, no. 8, pp. 7244–7251, 2020.
[14] X. Chen, Y. Kong, X. Fang, and Q. Wu, “A fast two-stage ACO algorithm for robotic path planning,” Neural Computing and Applications, vol. 22, pp. 313–319, 2013.
[15] Z. Cai, J. Liu, L. Xu, and J. Wang, “Cooperative path planning study of distributed multi-mobile robots based on optimised ACO algorithm,” Robotics and Autonomous Systems, vol. 179, p. 104748, 2024.
[16] F. H. Ajeil, I. K. Ibraheem, M. A. Sahib, and A. J. Humaidi, “Multi-objective path planning of an autonomous mobile robot using hybrid PSO-MFB optimization algorithm,” Applied Soft Computing, vol. 89, p. 106076, 2020.
[17] M. Gemeinder and M. Gerke, “GA-based path planning for mobile robot systems employing an active search algorithm,” Applied Soft Computing, vol. 3, no. 2, pp. 149–158, 2003.
[18] C. Härdtlein, C. Karg, M. Schmelzle, L. Ollinger, and R. Daub, “Energy-orientated path planning for mobile robots using the SMA swarm intelligence algorithm,” Procedia CIRP, vol. 130, pp. 873–878, 2024.
[19] Y. Chen, C. Tang, and Z. Yi, “A novel image encryption scheme based on PWLCM and standard map,” Complexity, vol. 2020, no. 1, p. 3026972, 2020.
[20] M.-Y. Cheng and D. Prayogo, “Symbiotic organisms search: a new metaheuristic optimization algorithm,” Computers & Structures, vol. 139, pp. 98–112, 2014.
[21] Q. Wu, J. Miao, Z. Liu, and J. Chang, “Research on the Optimization Method of Visual Sensor Calibration Combining Convex Lens Imaging with the Bionic Algorithm of Wolf Pack Predation,” Sensors, vol. 24, no. 18, p. 5926, 2024.
Biographies

Longxue Cheng, Master’s degree, Master of Engineering, is a lecturer at the Department of Electrical Engineering, Hebei Institute of Mechanical and Electrical Technology. Her research covers applied electronics, information engineering, mobile robot localization algorithms, path planning algorithms, multi-sensor fusion frameworks, and embedded system development.

Yupeng Li, Master’s degree, Master of Engineering, is a lecturer at the Department of Electrical Engineering, Hebei Institute of Mechanical and Electrical Technology. His research focuses on mobile robotics, embedded systems, applied electronics, and IoT technologies.

Longfei Yue, Master’s degree, Master of Engineering, is a lecturer at the Department of Mechanical and Electrical Technology. His work centers on control theory analysis and control-related engineering applications.

Litao Sun, Master’s degree, Master of Engineering, is a lecturer at the Department of Electrical Engineering, Hebei Institute of Mechanical and Electrical Technology. His research focuses on intelligent control systems, pattern recognition, and AI-driven defect detection.

Xianxia Liang, Master’s degree, Master of Engineering, is a lecturer at the Department of Electrical Engineering, Hebei Institute of Mechanical and Electrical Technology. Her research interests include mechatronics, industrial robotics, machine vision, and image processing.
Distributed Generation & Alternative Energy Journal, Vol. 40_3, 573–594.
doi: 10.13052/dgaej2156-3306.4036
© 2025 River Publishers