Sensitivity Analysis of Quality of B-spline Parameterization on Isogeometric Analysis
Sangamesh Gondegaon1,* and Hari Kumar Voruganti2
1M V J College of Engineering Bangalore, India
2National Institute of Technology, Warangal, India
E-mail: sangamesh.gondegaon@mvjce.edu.in; harikumar@nitw.ac.in
Corresponding Author
Received 27 August 2020; Accepted 11 February 2021; Publication 06 May 2021
Abstract
Isogeometric analysis (IGA) is a mesh free technique which make use of B-spline basis functions for geometry and field variable representation. Parameterization of B-spline for IGA is the counterpart of meshing as in finite element method (FEM). The objective of parameterization is to find the optimum set of control points for B-spline modelling. The position of control points of a B-spline model has huge effect on IGA results. In this work, the effect of B-spline parameterization on IGA result is presented. One dimensional case of bar with self-weight is solved and compared with exact analytical solution. First fundamental matrix is used as evaluation metric to check the quality of parameterization for 2-D domains. A heat conduction problem of a square domain is presented to study the parameterization effect for 2-D case.
Keywords: Isogeometric analysis, B-spline, parameterization, first fundamental matrix..
1 Introduction
Isogeometric analysis is a technique which unifies Computer Aided Design (CAD) and Computer Aided Engineering (CAE) [1]. The idea of isogeometric analysis is to use B-spline basis functions for representation of both geometry and field variable (Ex: displacement in static structural analysis). Since, same geometric model is used for both design and analysis, meshing process in IGA is avoided. Meshing considered to be the biggest bottleneck in finite element analysis, because development of analytical model from CAD model is a time consuming task [2]. Use of B-spline model for analysis also enables exact geometry representation, which outcomes in more accurate results. The way quality of FEM mesh affects efficiency and analysis result, in a similar way quality of B-spline parameterization has huge influence on the IGA result [3].
Parameterization for IGA is determined by a set of control points, order of basis functions and knot vector. The quality of parameterization depends upon the positions of the control points. A B-spline model can be exactly represented by infinite set of control points for a given degree of basis function. Given a boundary curves, finding an optimal set of B-spline control points which provides accurate results is an open problem [3].
The remainder of the paper is organized as follows. Related work is discussed in Section 2 and conventional parameterization methods used in this paper are given in Section 3. Section 4 includes result and discussion and in last section concluding remarks and scope of future work are included.
2 Related Work
In a recent decade, lot of progress has been done in the area of isogeometric analysis. The introductory paper on isogeometric analysis was presented in the year 2005 by Hughes et al. [1], in which the detailed framework of IGA is provided. Moreover, various refinement strategies and its effect on isogeometric results are also mentioned in the paper. To validate isogeometric methodology, various structural problems are solved using IGA. The first paper pertaining to B-spline parameterization with regard to IGA was published by Martin et al. [4]. Authors used discrete volumetric harmonic function for B-spline volumetric parameterization method to fit a genus-0 mesh. A variational based approach for constructing Non Uniform Rational B-splines (NURBS) parameterization of swept volume is presented by Aigner et al. [5]. The idea of converting the problem of B-spline parameterization into an optimization problem was given by Gang Xu et al. [3]. The initial parameterization of the domain is developed with the use of discrete Coon’s method. The idea of breaking the problem of finding optimal control points for a B-spline model into two stages is proposed by Gondegaon et al. [6]. The idea is to find parameter values and control points separately. Moreover, the idea to use first fundamental matrix for the quality evaluation of B-spline parameterization was proposed.
An idea of developing a 2D and 3D B-spline model by dividing the geometrical domain into small Bezier surfaces is presented by Xia et al. [7]. Authors used Jacobian based optimization method to improve the parameterization quality. Pan et al. [8] highlighted that the B-spline model with high rank parameterization increases the computational cost. Authors has developed a low rank B-spline modelling technique by establishing a bijective mapping between computational domain with the unit square. The same methodology is extended for modelling B-spline volume with good quality of tri-variate B-spline parameterization [9]. Adan et al. [10] proposed an algorithm to develop a NURBS triangulation with equilateral triangles.
In this paper, one dimensional B-spline curve for different cases are modelled using two conventional parameterization methods: uniformly spaced method and chord length method. A heat conduction problem of a square domain with two different parameterization is presented to study the parameterization effect for 2-D case. The effect of these parameterizations on isogeometric analysis results are evaluated and compared with the analytical solution.
3 Methodology
A B-spline model is a piece-wise combination of B-spline basis functions and its control points. B-spline equation for a curve is given by [11]
| (1) |
where is the B-spline basis function of degree , is the number of control points and is the co-ordinate of control points.
B-spline model are divided into sub-domains which are called knot-spans. These knot-spans corresponds to elements as in the case of FEM. The points at which B-spline are alienated are called knots and the vector containing these knot values are called knot vector. A knot vector for parameter is written as . Usually for IGA geometric modelling, open knot vector is used where it’s first and last knots repeats times. Use of open knot vector guarantees that the B-spline curve is interpolated at first and last control points. B-spline basis function for a given open knot vector is defined recursively by the following equations [11], For p=0,
| (2) |
For
| (3) |
B-spline control points are calculated by solving B-spline equation mentioned in Equation (1). The input for the problem is the bunch of data points on the B-spline curve/surface. The objective is to find B-spline control points which will approximate all these data points, moreover the B-spline model should have good quality of parameterization. The unknowns in the B-spline equation are degree of B-spline basis functions, knot vector, number of control points and parameter values at the data points. Based on the corrugation of data points, degree of the basis functions and number of control points are chosen. An open knot vector is used for calculation. The parameter values at each data point are calculated with the use of two conventional methods: uniformly spaced method and chord length method.
3.1 Uniformly Spaced Method
In this method, the parameter values are uniformly assigned to the data points regardless of their locations. The method produces satisfactory results for the evenly distributed data points. This method gives bad quality of B-spline parameterization when the data points are randomly distributed. The B-spline model developed from uneven data points with the use of uniformly spaced method will have wriggle and self-intersections. For this reason, uniformly spaced parameterization method is used to assign parameters for the evenly distributed data points.
3.2 Chord Length Method
This method make use of chord length distance of the polyline formed by data points. The parameter values are assigned to data points proportionally to its chord length distance value. If the first parameter value corresponds to data point is , then the succeeding parameters corresponding to can be given as [12]
| (4) |
Chord length method is the most commonly used parameterization method. This method gives good quality of B-spline parameterization even when the data points are randomly distributed.
3.3 Evaluation of Control Points
The parameter values for all data points are calculated using these conventional methods. Upon substitution of these parameter values, each data point is represented in the form of Equation (1). When all the data points are considered, it gives a set of linear equations [11]
| (5) |
The required B-spline control points are calculated by solving this system of linear equations. A bunch of eight data points are considered for comparison of both parameterization methods. B-spline control points are calculated with the use of both the methods. The B-spline model is approximated using second order basis functions with eight B-spline control points. The resulting B-spline curve for both the cases are presented in Figure 1.
From the Figure 1, it can be seen that both the B-spline curves are passing through the data points. The B-spline curve developed using uniformly spaced method has self-intersection which results in singularity. The B-spline curve developed using chord length method has no self-intersection and results in relative better parameterization.
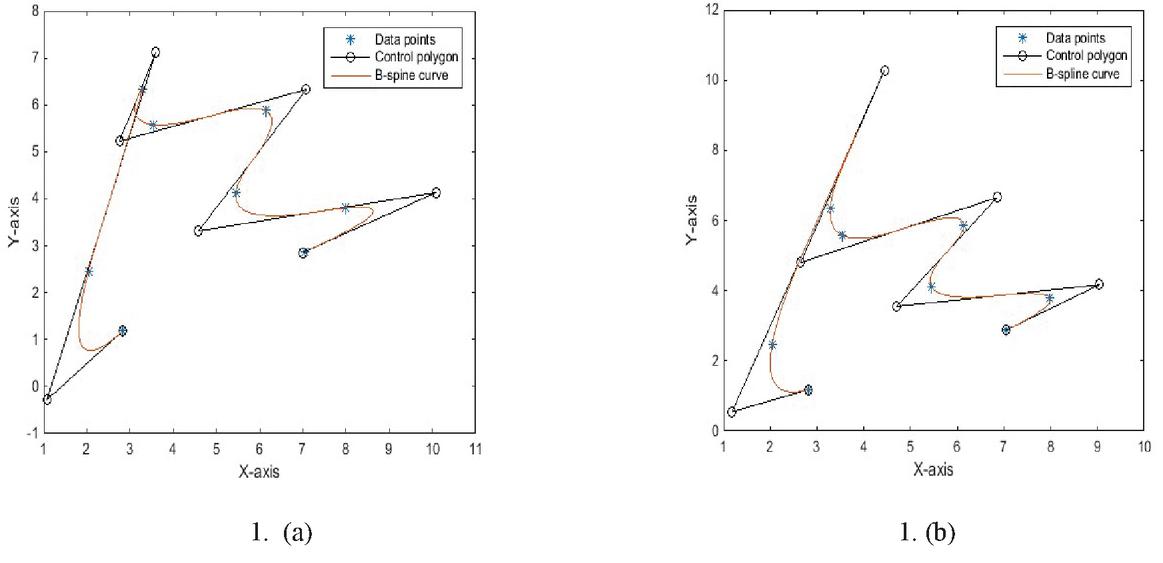
Figure 1 Comparison of parameterization methods: a) uniformly spaced method b) chord length method.
3.4 First Fundamental Matrix
In this paper, first fundamental matrix is used to evaluate the quality of planar B-spline surface. If C is the B-spline equation which maps parameter domain onto physical domain, then the relation for Jacobian matrix is given by [6]
| (6) |
From the Equation (6), the relation for first fundamental matrix is [6]
| (7) |
4 Results and Discussion
In this section, the effect of quality of B-spline parameterization on isogeometric analysis result is analyzed. A bar under self-weight problem is solved to analyze the effect of B-spline parameterization on isogeometric analysis result. For this, a B-spline curve is developed with the use of two parameterization methods mentioned in the previous section. These two B-spline curves are considered for analysis and the results are compared with the analytic solution. Similarly, the B-spline parameterization effect on isogeometric analysis for two dimensional is analyzed with the use of heat conduction problem. A square domain with two different B-spline parameterizations is considered and Poisson’s equation is solved on this domain. Isogeometric analysis results for both the cases are compared with the analytical solution.
4.1 1D case: Bar Under Self-weight
A bar under self-weight problem is solved to analyze the effect of B-spline parameterization on isogeometric analysis result. Modulus of elasticity, density of the material, acceleration due to gravity and cross sectional area is considered. A quadratic B-spline curve with five B-spline control points is considered. A B-spline curve is developed with the use of two parameterization methods mentioned in the previous section. B-spline control points evaluated using both the parameterization methods are mentioned in Table 1.
Isogeometric analysis results for both the B-spline models are compared with the analytical solution for displacement and stress are given by
| (8) | ||
| (9) |
Table 1 Control Points for Bar problem
| Parameterization Method | Control Points () |
| Uniformly spaced method | [0,0], [0.193,0], [0.47,0], [0.73,0], [1,0] |
| Chord length method | [0,0], [0.166,0], [0.5,0], [0.833,0], [1,0] |
Isogeometric analysis results of displacement and stress for both the cases are plotted in Figures 2 and 3. It can be observed from Figure 2 that, the displacement variation of uniformly spaced method differs from that analytical solution. The small deviation of displacement variation results in more error in the stress result which is evident in the Figure 2(b). From Figure 3, it can be observed that displacement and stress results for chord length method are in good agreement with the exact analytical solution. The numerical results are given in Table 2. In the table, error between isogeometric analysis result and exact solution is calculated with the use of norm. The value of norm for displacement using uniformly spaced method is 0.0062, which is on higher side. Whereas the corresponding value for chord length method is 3.0836e, which is in good agreement with analytical solution. Similar trend is observed for the norm for stress.
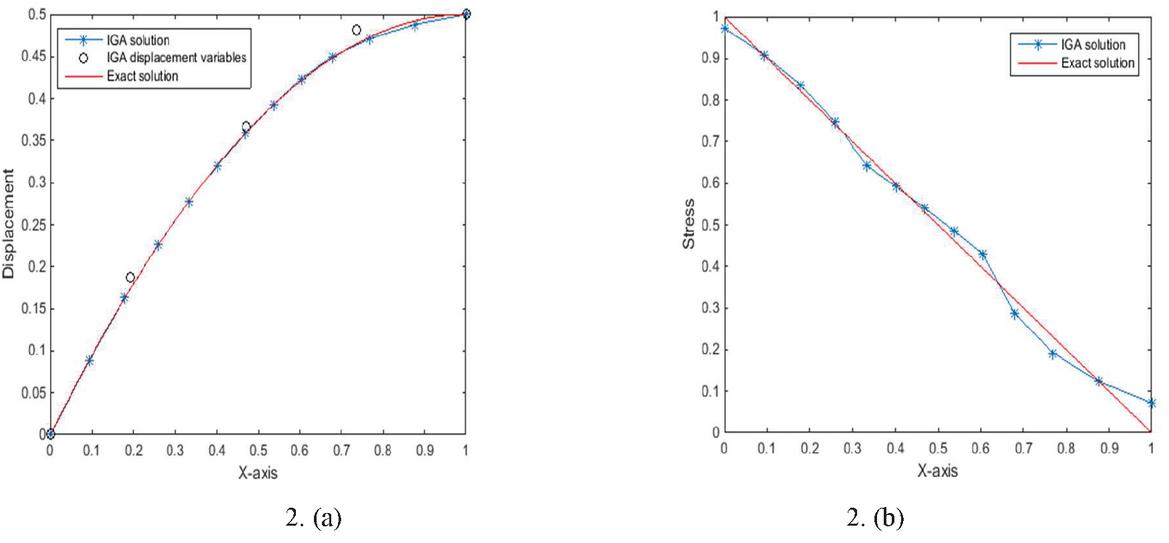
Figure 2 Uniformly spaced parameterization result: (a) displacement (b) stress.
4.2 2D case: Heat Conduction Problem
A heat conduction problem in the form of Poisson’s equation over a square domain is shown in Figure 4. This problem is solved to evaluate the B-spline parameterization effect on IGA result in two dimension. The heat conduction problem is given by
| (10) |
Table 2 Comparative results
| Method | Norm | |
| Displacement | Stress | |
| Uniformly spaced parameterization | 0.0062 | 0.1144 |
| Chord length parameterization | 3.0836e-07 | 1.3188e-05 |
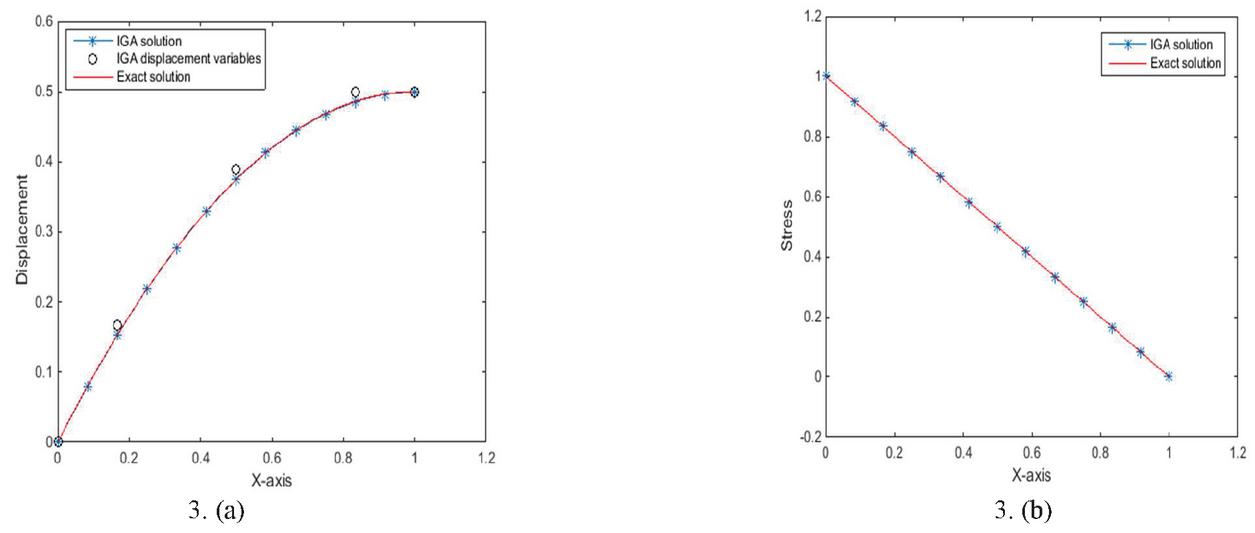
Figure 3 Chord length spaced parameterization result: (a) displacement (b) stress.
Boundary conditions applied on the domain are and , f(x) is a heat source term applied over the domain and is given by [13]
| (11) |
The analytical solution for the given Poisson’s equation subjected to above boundary conditions solved over the square domain is given by [13]
| (12) |
Bi-cubic B-spline basis functions with eight control points in each parametric directions are used to develop a B-spline surface of square domain. Two B-spline surface of square domain with dissimilar parameterizations are taken as input for isogeometric analysis of Poisson’s equation. The IGA results for both these B-spline surfaces are compared to evaluate the parameterization effect. For the first case, chord length parameterization method is used to develop a bi-cubic B-spline surface. The developed B-spline surface with its corresponding control points are shown in Figure 5. From the figure, it can be seen that iso-parametric lines are distributed evenly, indicating in good parameterization.
To evaluate the quality of B-spline parameterization, first fundamental matrix at points is calculated for the B-spline surface shown in Figure 5. The determinant value of the first fundamental matrix is plotted over the domain for the surface. Since the B-spline surface of square domain does not have any self-intersections, the determinant of the first fundamental matrix falls in the positive range as shown in Figure 6(a). The determinant value at all the grid points is one for this ideal case.
Two iso-parametric curves intersect each other orthogonally if the product of second and third term of the first fundamental matrix is zero and is given by . The value of F ranges from 0 to 1. The perfect value of F at all the grid points over the domain is zero. Since in a B-spline surface of square domain, all the curves of one parameter are orthogonal to curves of second parameter, the value of F of the first fundamental matrix at all points over the domain is zero as shown in Figure 6(b).
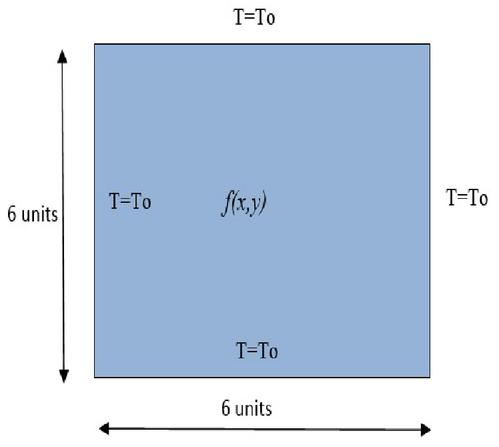
Figure 4 Heat conduction: Problem definition parameterization.
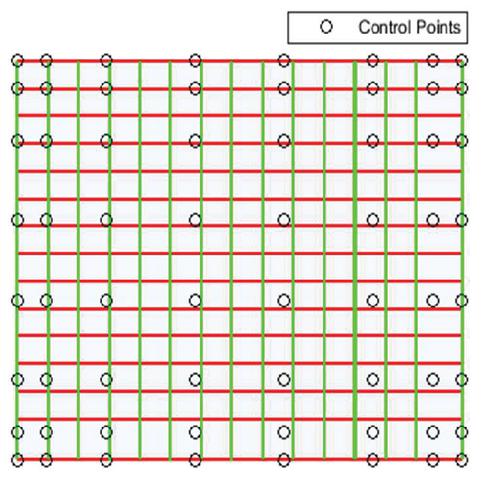
Figure 5 B-spline surface with chord length.
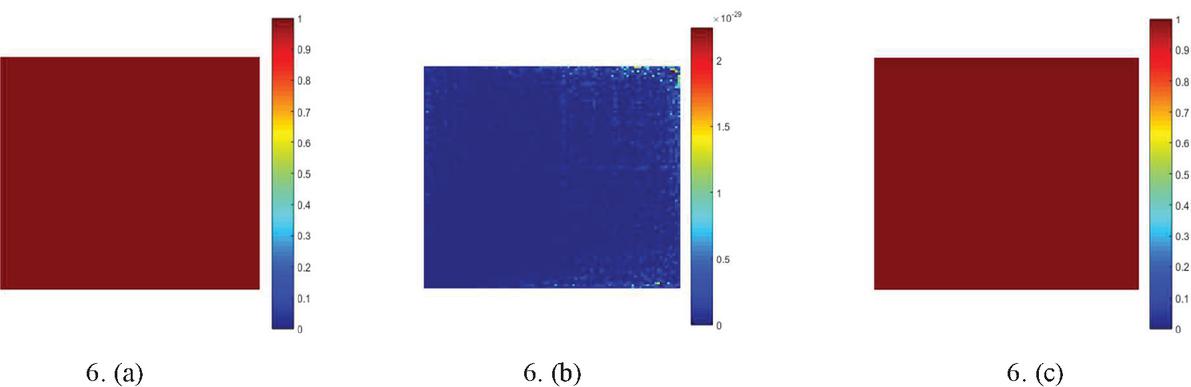
Figure 6 First fundamental matrix parameters for first B-spline surface: (a) bijectivity check, (b) orthogonality check, (c) uniformity check.
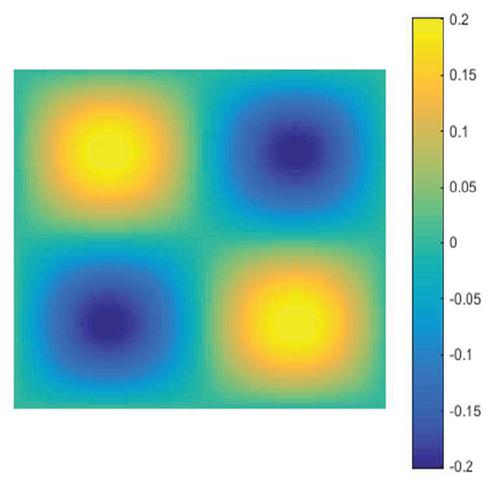
Figure 7 Temperature variation using IGA.
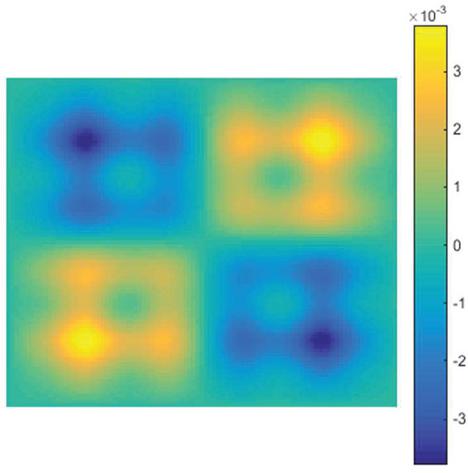
Figure 8 Error between IGA and analytical solution.
The iso-parametric curves are distributed evenly if the product of first and last term of the first fundamental matrix is one and is given by E 1 and G 1 or EG 1. The range of EG is in between 0 to 1. If curves are uniformly spaced, then the product of E and G is one. For the B-spline parameterization to be good, the EG value should be close to unity. Since the iso-parametric structure of the B-spline surface of square domain is uniform, the value of EG of the first fundamental matrix at all points over the domain is one as shown in Figure 6(c).
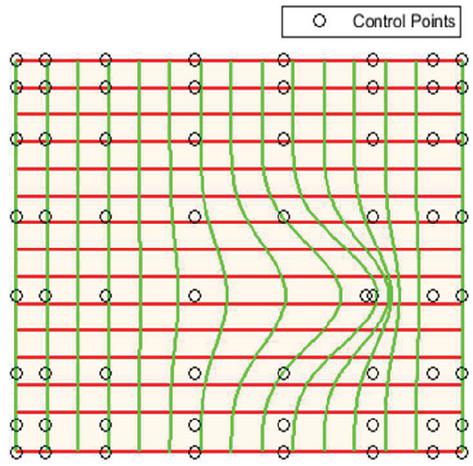
Figure 9 B-spline surface with second parameterization.
To show the effect of B-spline parameterization on IGA, another B-spline model with modified parameterization is considered. Second B-spline surface is created by just moving one control point of first B-spline surface as shown in Figure 9. It can be observed that there is lot of distortion in the iso-parametric curves of B-spline surface. But this B-spline surface is also a valid one since its capturing the domain exactly and does not have any self-intersection.
The determinant value of the first fundamental matrix is plotted over the domain for the surface. Since the B-spline surface does not have any self-intersections, the determinant of the first fundamental matrix falls in the positive range as shown in Figure 10(a). But the determinant values are less than one in the distortion region, which indicates lower quality of B-spline parameterization as compared to the previous B-spline surface.
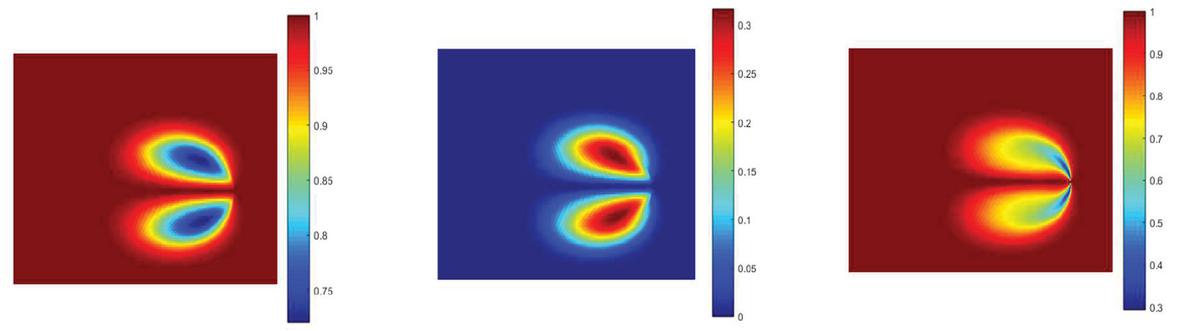
Figure 10 First fundamental matrix parameters for second B-spline surface: (a) bijectivity check, (b) orthogonality check, (c) uniformity check.
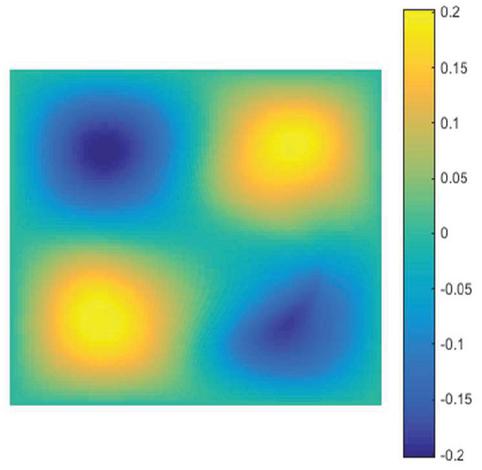
Figure 11 Temperature variation using IGA.
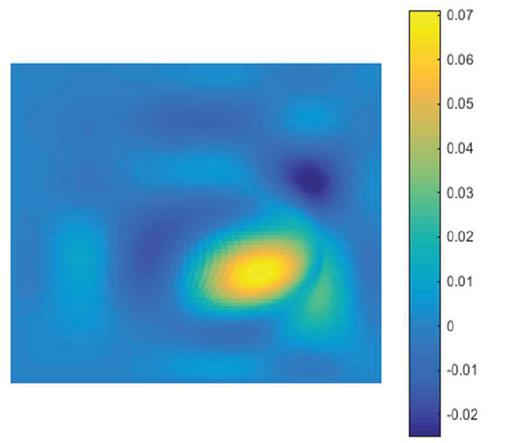
Figure 12 Error between IGA and analytical solution.
Since there is a distortion in the B-spline surface, the iso-parametric net is not orthogonal throughout the domain. Blue region in the Figure 10(b) which indicates value of F near zero is spread all over the domain except the distorted area. The value of F above zero indicates bad quality of parameterization. Similar pattern is observed in the Figure 10(c), the ideal value of EG should be one for uniform distribution of iso-parametric lines. This value is less than one in the distorted region. From these figures, it can be observed that the second B-spline surface has lower parameterization quality than the first B-spline surface.
IGA result for the second case of B-spline parameterization is shown in Figure 11. The effect of distortion can be seen clearly in the temperature variation. Error plot between IGA and analytical solution is plotted in Figure 12 and can be observed that maximum error range is increased as compared to the previous case. For the first case the error range was from to , whereas for the second case the range is form 0.02 to 0.07. Also, the effect of distortion is local one and the error is maximum at the distorted region. It can be observed that by changing one control point there is a significant change in the B-spline parameterization and which results in increase in error.
From these comparative results, it is evident that parameterization of a B-spline model plays a major role in the accuracy of IGA result. Finding an optimum set of B-spline control points which gives a B-spline surface with good parameterization is a difficult task.
5 Conclusions
Isogeometric analysis is emerging as the future alternative to finite element analysis. Since, it is a mesh-free method, IGA based structural shape optimization results in better accuracy and less computational time as compared to FEM. The only bottleneck in IGA is to find the optimum set of control points which gives better IGA result. In this paper, the significance of quality of B-spline parameterization on isogeometric results is shown. Parameterization effect for 1-D case is studied by solving a case of deflection of bar under self-weight problem. It is observed that, chord length parameterization method is effective as compared to uniformly spaced parameterization method. To study the parameterization effect for 2-D case, a heat conduction problem of a square domain with two different parameterizations is solved. It is observed that, by changing the position of only one B-spline control point, there is substantial increase in the error. It is established that the quality of B-spline parameterization is having a significant effect on IGA results.
Developing a B-spline surface/volume with good parameterization for a complex domains is difficult task. Different analysis aware modelling techniques are presented, which are limited to certain geometries. Less work is reported in this field, future scope is to formulate B-spline modelling technique for complex and intricate shapes.
References
[1] Hughes, T. J., Cottrell, J. A., & Bazilevs, Y. (2005). Isogeometric analysis: CAD, finite elements, NURBS, exact geometry and mesh refinement. Computer methods in applied mechanics and engineering, 194(39–41), 4135–4195.
[2] Cottrell, J. A., Hughes, T. J., & Bazilevs, Y. (2009). Isogeometric analysis: toward integration of CAD and FEA. John Wiley & Sons.
[3] Xu, G., Mourrain, B., Duvigneau, R., & Galligo, A. (2011). Parameterization of computational domain in isogeometric analysis: methods and comparison. Computer Methods in Applied Mechanics and Engineering, 200(23–24), 2021–2031.
[4] Martin, T., Cohen, E., & Kirby, R. M. (2009). Volumetric parameterization and trivariate B-spline fitting using harmonic functions. Computer aided geometric design, 26(6), 648–664.
[5] Aigner, M., Heinrich, C., Jüttler, B., Pilgerstorfer, E., Simeon, B., & Vuong, A. V. (2009, September). Swept volume parameterization for isogeometric analysis. In IMA international conference on mathematics of surfaces (pp. 19–44). Springer, Berlin, Heidelberg.
[6] Gondegaon, S., & Voruganti, H. K. (2018). An efficient parametrization of planar domain for isogeometric analysis using harmonic functions. Journal of the Brazilian Society of Mechanical Sciences and Engineering, 40(10), 493.
[7] Xia, S., & Qian, X. (2018). Generating high-quality high-order parameterization for isogeometric analysis on triangulations. Computer Methods in Applied Mechanics and Engineering, 338, 1–26.
[8] Pan, M., Chen, F., & Tong, W. (2018). Low-rank parameterization of planar domains for isogeometric analysis. Computer Aided Geometric Design, 63, 1–16.
[9] Pan, M., & Chen, F. (2019). Low-rank parameterization of volumetric domains for isogeometric analysis. Computer-Aided Design, 114, 82–90.
[10] Adan, D. H., & Cardoso, R. (2020). Quasi-Isotropic Initial Triangulation of NURBS Surfaces. European Journal of Computational Mechanics, 27–82.
[11] Piegl, L., & Tiller, W. (1996). The NURBS book. Springer Science & Business Media.
[12] Saxena, A., & Sahay, B. (2007). Computer aided engineering design. Springer Science & Business Media.
[13] Xu, G., Mourrain, B., Duvigneau, R., & Galligo, A. (2013). Optimal analysis-aware parameterization of computational domain in 3D isogeometric analysis. Computer-Aided Design, 45(4), 812–821.
Biographies

Sangamesh Gondegaon is currently working as Associate Professor at Department of Mechanical Engineering in M. V. J College of Engineering, Bangalore. He received his B.E degree from Sri Jayachamarajendra College of Engineering, Mysore. He received his master degree in Machine Design from B.M.S College of Engineering, Bangalore. He obtained his Ph.D from Department of Mechanical Engineering, National Institute of Technology, Warangal. His research interest are Isogeometric Analysis, Finite Element Analysis and Geometric modelling using B-splines.

Hari Kumar Voruganti is currently working as Associate Professor at Department of Mechanical Engineering in National Institute of Technology, Warangal. He received his B.Tech degree from KITS, Warangal. He received his master degree in Automation and Robotics from Osmania University, Hyderabad. He obtained his Ph.D from Department of Mechanical Engineering, Indian Institute of Technology, Kanpur. He went on pursue his Post-Doctoral Fellowship University of the Witwatersrand, Johannesburg. He was also a visiting scholar for Technical University, Berlin, Germany. He previously worked as Assistant Professor in Indian Institute of Information Technology, Design & Manufacturing, Jabalpur. His research interest are Computer Aided Design, Isogeometric Analysis, Structural Optimization, Robotics, Applied Optimization and Computational Biology.
European Journal of Computational Mechanics, Vol. 29_4-6, 345–362.
doi: 10.13052/ejcm1779-7179.29462
© 2021 River Publishers