The Fluid-structure Coupling Analysis of Steel-Wire-Reinforced Flexible Pipe Under Inner Fluid Pressure Impact
Zhang Shouyuan
School of Vehicle and Mobility, Tsinghua University, Beijing, China
E-mail: zhangshouyuan@163.com
Received 07 October 2020; Accepted 24 February 2021; Publication 06 May 2021
Abstract
Identifying dynamic characteristics of the fluid filled steel-wire-reinforced flexible pipe is vital in controlling the pipe vibration. A direct fluid-structure coupling method based on finite element analysis is proposed and validated by modal simulation of an oil filled T-shape pipe. An innovative way of modeling steel-wire-reinforced rubber pipe is put forward. The modeling method is validated by modal test of the water-filled pipe. The 2nd Mooney-Rivlin constitutive model is used for the rubber material. Transient dynamic simulations of a bending steel-wire-reinforced pipe filled with water under step and sine-shape pressure impact are performed for the first time. Different fluid turbulence models are used to evaluate the influences on pipe vibration. The dynamic characteristics of the water filled flexible pipe is researched under different fluid pressures. The vibration peak frequencies of the water-filled pipe under various impact excitations coincide well with the fluid-structure coupling modes of the pipe.
Keywords: Fluid-structure coupling, steel-wire-reinforced flexible pipe, transient dynamic simulation, finite element analysis.
1 Introduction
The steel wire winding rubber pipe is widely used in industries of aerospace, oil exploitation, vehicle etc. Repeated failures of hydraulic pipes are found in industries at present because of high power density requirement and high fluid pressure. Failure of hydraulic pipe system is mainly caused by violent vibration, which may lead to huge economic loss. The Poisson coupling between the pipe structure and oil in the pipe enhances the vibration, which even cause temporary flow stagnation. Because the axial fluid velocity in the pipe oscillates in a frequency that coincides with the modal frequency of the oil filled pipe under transient pressure impact. The fluid-structure coupling dynamic characteristics of hydraulic pipe determines the vibration level and system reliability. The theory of water hammer considering transient effect in simple pipe is proposed in 1913 by Allievi L [1]. The research on fluid-conveying pipe vibration starts in the 1960s. Paidoussis carries out experiments on dynamics of flexible pipe with axial flow [2]. Tijsseling, Wang L and Ni Q make reviews on the vibration of slender pipe subjected to axial flow [3, 4]. Their researches mainly focus on the modal test of pipe under different pressures and fluid velocities as well as the stability of pipe with various constrains. The dynamic response of pipe under transient flow excitation is originally solved on basis of water hammer equations, for example, by Method of Characteristics (MOC) or 4/6/14-equation method which takes pipe as Euler beam or Timoshenko beam [5–7]. In frequency domain, Component-syntheses method, Transfer Matrix Method (TMM) are proposed [8–11]. However, most of the above methods are limited to simple pipe shape and linear material except combining with Finite Element Method (FEM) or Finite Volume Method (FVM). The Navier-Stokes equations are used to solve the fluid-structure interaction (FSI) problem of complex pipe in 1990s. S Z Zhao developed iterative FSI method based on software CFX and Abaqus to predict the pulsatile flow in Carotid artery bifurcation [12]. Jia Wu performs transient FSI simulation of T-shape metal pipe with closed branch and finds that self-excited vibration sustains in the final stable oscillation [13]. Jari Hyvarinen studies modal frequencies and modal shapes of hydraulic pipe under different fluid velocities using finite element and boundary element method with measured pipe bending stiffness [14]. Most of the studies at present use linear elastic pipe material and the steel wires are not modeled in detail.
The fluid-structure dynamic simulation of curved hydraulic steel-wire-reinforced flexible pipe under transient excitation is a challenging topic due to the complicate pipe structure, nonlinear rubber material with large damping and the inner turbulent flow with high velocity. Efforts are made to find the vibration mechanism of hydraulic pipe and potential solutions in this paper.
There are three following sections in this paper.
Section 2: Direct FSI simulation method using Navier-Stokes (N-S) equations is proposed for dynamic simulation of oil filled pipe. It is validated by FSI simulation of an oil filled T-shape pipe using ADINA software. The modal result from the direct FSI simulation is consistent with the modal test result.
Section 3: Detail finite element model of a curved steel-wire-reinforced rubber pipe as well as inner fluid is built. Innovative modeling method of such complicated flexible pipe is first proposed and described. It is validated by modal simulation and modal test of the water filled pipe.
Section 4: Different fluid turbulence models (Standard k- model, Large-Eddy Simulation (LES) with Smagorinsky-Lilly subgrid model, Spalart-Allmaras Detached-Eddy Simulation (S-A/DES) model) are used to research the dynamic response of pipe under transient fluid pressure excitation. The pipe vibration responses are obtained with three different inner fluid pressures (0.5 MPa, 1 MPa, 1.5 MPa) under step-shape fluid pressure impact. The influences of inner fluid pressure on pipe dynamic characteristics are analyzed. The time and frequency response characteristics of the water filled pipe under step and sine-shape fluid pressure impact is studied. The operational modal shapes of the pipe under fluid pressure impact coincide well with fluid-structure coupling modal shapes. The dynamic response of fluid velocity and pressure in the flexible pipe are researched in transient impact conditions.
2 Validation of Direct FSI Method
2.1 Direct Fluid-structure Coupling Method
The dynamic coupling of fluid and structure is based on the equilibrium of displacement and stress on the fluid-structure interface.
| (1) |
Where: is the normal direction of the interface. fluid mesh and solid displacements on the interface. fluid surface traction and structure stress. The fluid velocity on the interface is resulted from derivative of coupling structure displacement. Arbitrary Lagrangian Euler (ALE) algorithm is used to couple Lagrangian moving solid mesh with an Eulerian fluid mesh. The fluid nodes on FSI boundary follow solid nodes and the nodes inside fluid domain is solved using Laplace equation. The direct fluid-structure coupling method is a two way monolithic FSI approach. With the initial solution guess at time , the computational procedure is as follows:
(1) The coupling maxtrices are assembled. The fluid-structure coupling dynamic equations are linearized in a matrix system at time and at iteration number .
| (2) | |
are Jacobian matrixes of fluid and structure system. are displacement and stress relaxation factors which are used to accelerate convergence in difficult cases. is the solution vector that includes all basic variables in the coupling system such as structure displacement, fluid pressure, fluid velocity etc.
(2) The coupling equations are solved using Newton-Raphson method. The convergence criteria of iterations for fluid-structure dynamic coupling is based on displacement and stress tolerances on the interface as follows.
| (3) |
Where are tolerances for displacement and stress convergence. is a pre-defined small constant for the purpose of overriding stresses or displacements in case they become too small to measure convergence. The stress and/or displacement residuals against the specified tolerances are checked. If the solution not converges, the program goes back to (1) and continue for the next iteration unless a maximum number of FSI iterations have been reached.
(3) If the solution converges at time t, the result is saved. The program continue to solve at time until time is over.
2.2 Modal Analysis of T-shape Oil-filled Pipe
The FSI modal parameters of a T-shape pipe with oil is obtained by both Transfer Matrix Method with 14-equation model and modal test in paper [15]. In order to validate the proposed direct FSI method, Finite element model of the oil filled T-shape pipe is built. The pipe geometry and material parameters are shown in Figure 1 and Tables 1 and 2.
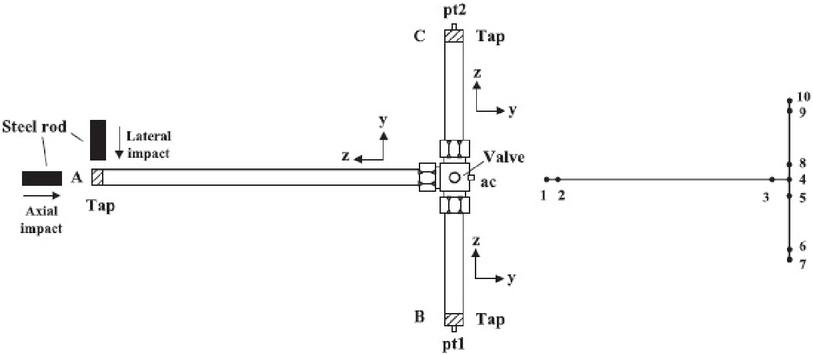
Figure 1 Schematic drawing of T-shape pipe system (pt pressure transducer, ac accelerometer, Tap tapped fitting).
Table 1 Dimension of T-shape pipe
| Position | Length (mm) | Inner/Outer Radius (mm) | Material |
| 1–2, 6–7, 9–10 | 10 | 0.0/12.7 | steel |
| 3–4, 4–5, 4–8 | 40 | 10.5/23.0 | steel |
| 2–3 | 1160 | 10.5/12.7 | Tungum |
| 5–6, 8–9 | 524 | 10.5/12.7 | Tungum |
Table 2 Material of T-shaped pipe and oil
| Pipe (Tungum) | Fitting (steel) | Oil |
| Density 8520kg/m3 | Density 7850 kg/m | Density 876 kg/m |
| Young’s modulus 116.5 GPa | Young’s modulus 207 GPa | Bulk modulus 1.5 GPa |
| Shear modulus 43.8 GPa | Shear modulus 79.6 GPa | Initial pressure 0.94 MPa |
| Poisson’s ratio 0.33 | ||
| Pipe wall thickness 2.2 mm |
Hexahedron solid elements are used for the pipe and oil finite element model. Three layers of elements in pipe thickness direction are built. The basic element size is 12 mm in axial direction. The fluid element size in radial and circumferential direction is 2 mm. The fluid and solid element nodes on the fluid-structure coupling surface coincides but being different nodes. The total element number for the pipe is 32000 and it is 82000 for the oil. The FSI model is shown in Figure 2.
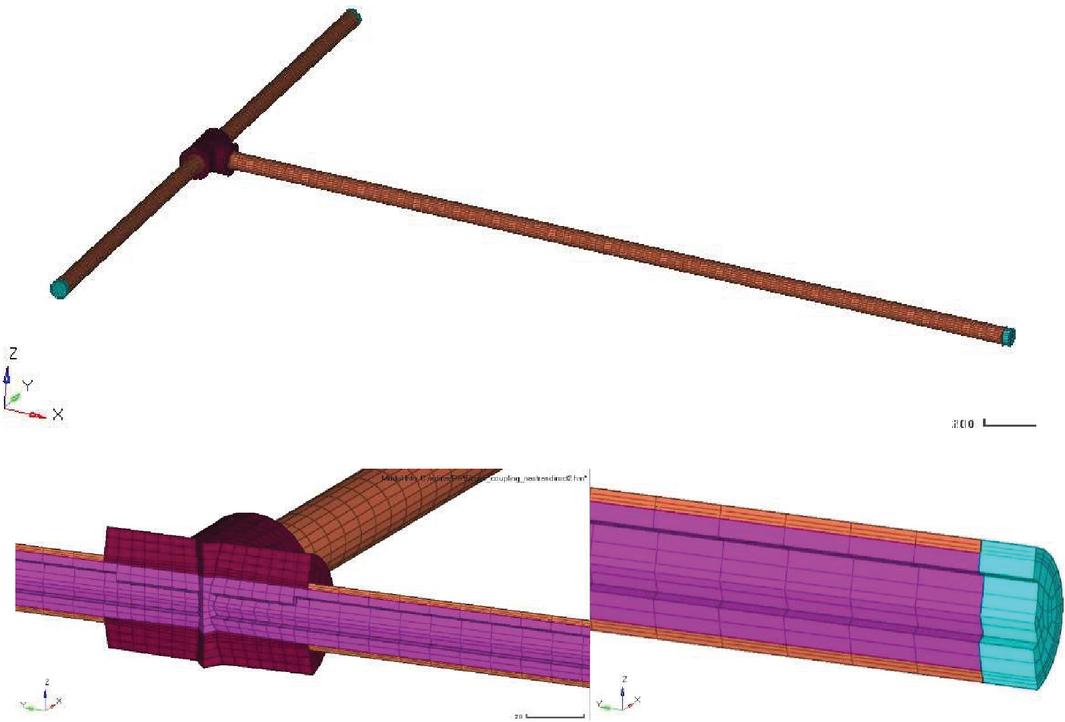
Figure 2 Finite element FSI model of the oil-filled T-shape pipe.
The modal simulation of the T-shape pipe with oil are performed in free-free condition using the direct fluid structure coupling method. The result is shown in Table 3 and Figure 3.
Table 3 Natural frequencies of oil-filled T-shape pipe from experiment and FSI simulation
| Order | Modal Test | Finite Element FSI |
| 1 | 22 (lateral impact) | 22.20 |
| 2 | 45.57 | |
| 3 | 58 (axial impact) | 57.79 |
| 4 | 65.58 | |
| 5 | 68.4 (lateral impact) | 68.42 |
| 6 | 147.47 | |
| 7 | 165.5 (lateral impact) | 165.10 |
| 8 | 191.89 | |
| 9 | 233.8 (lateral impact) | 232.84 |
| 10 | 297.07 | |
| 11 | 325 (axial impact) | 314.39 |
| 12 | 345.85 | |
| 13 | 353.66 |
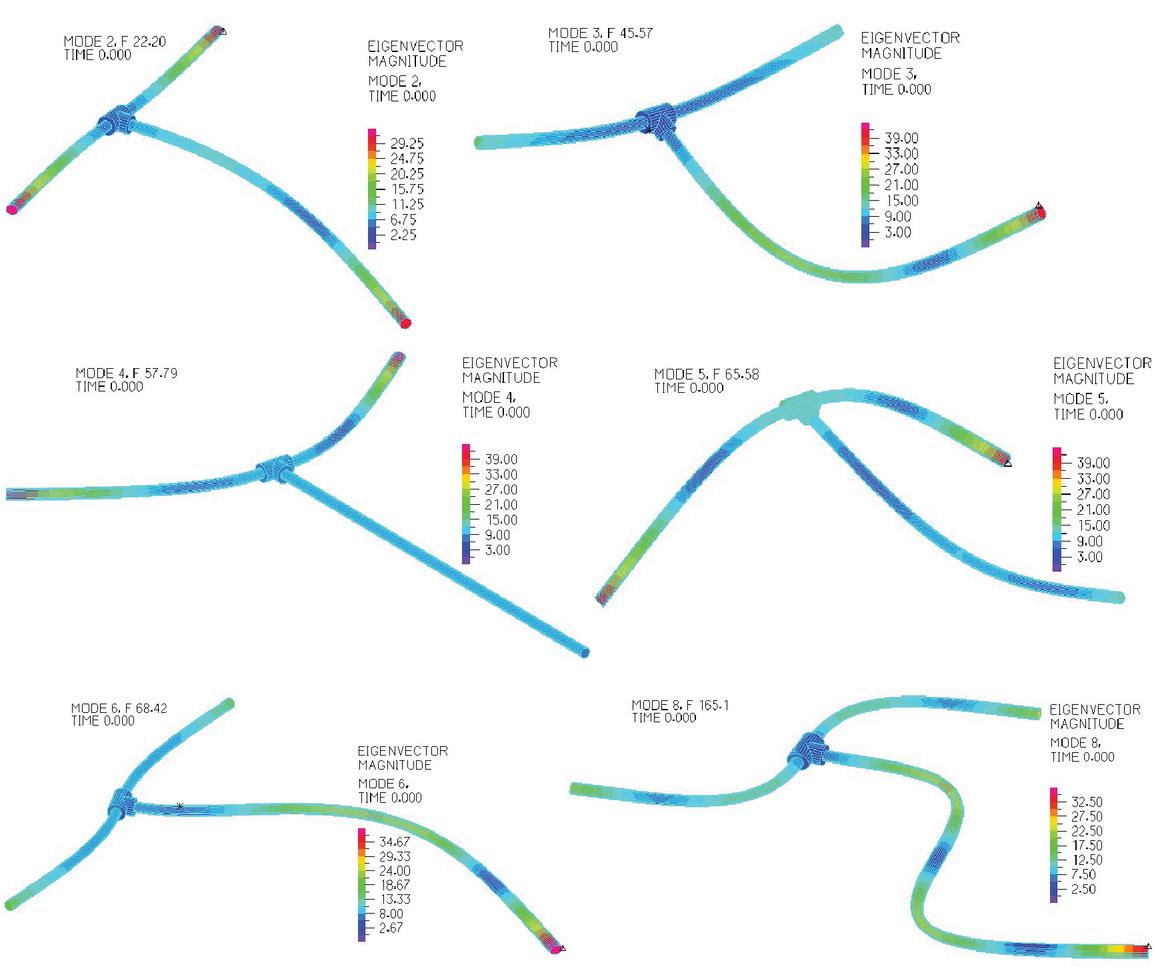
Figure 3 Modal shape of the oil-filled T-shape pipe.
The modal frequencies of the oil filled pipe obtained from simulation coincide very well with the modal test result and solution from TMM. The maximum error of the first 6 modal frequencies is 3.3%. It validates the proposed finite element FSI method in dynamic solution. There are some modes that obtained from finite element FSI simulation but not identified in modal test. Because the measuring points are much less than finite element nodes. Certain local modes could not be identified if the measuring points are not enough or not excited by impact force. The fluid-structure coupling modes solved using finite element FSI method are more complete than that from test.
3 Modal Simulation and Modal Test of Water Filled Steel-Wire-Reinforced Flexible Pipe
3.1 Finite Element Model of Steel-Wire-Reinforced Rubber Pipe
The geometry and cross section of the hydraulic steel-wire-reinforced pipe is shown in Figure 4. The pipe is in natural bending state. It is composed of 3 rubber layers with the thickness of 2 mm, 0.8 mm, 1 mm. There are helical steel wires embedded between every two rubber layers. The helix angle of the spiral wire is 54.6. The inner diameter of the pipe is 25.6 mm.
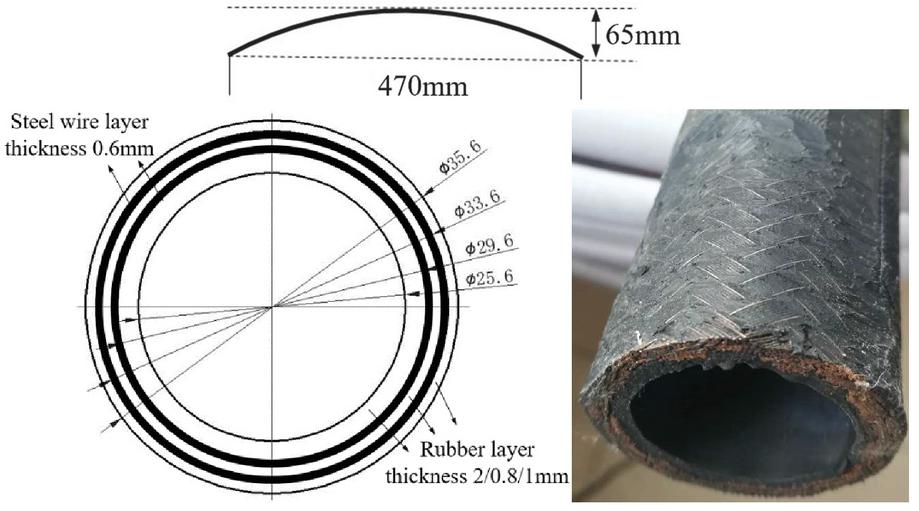
Figure 4 Geometry of the steel wire winding rubber pipe.
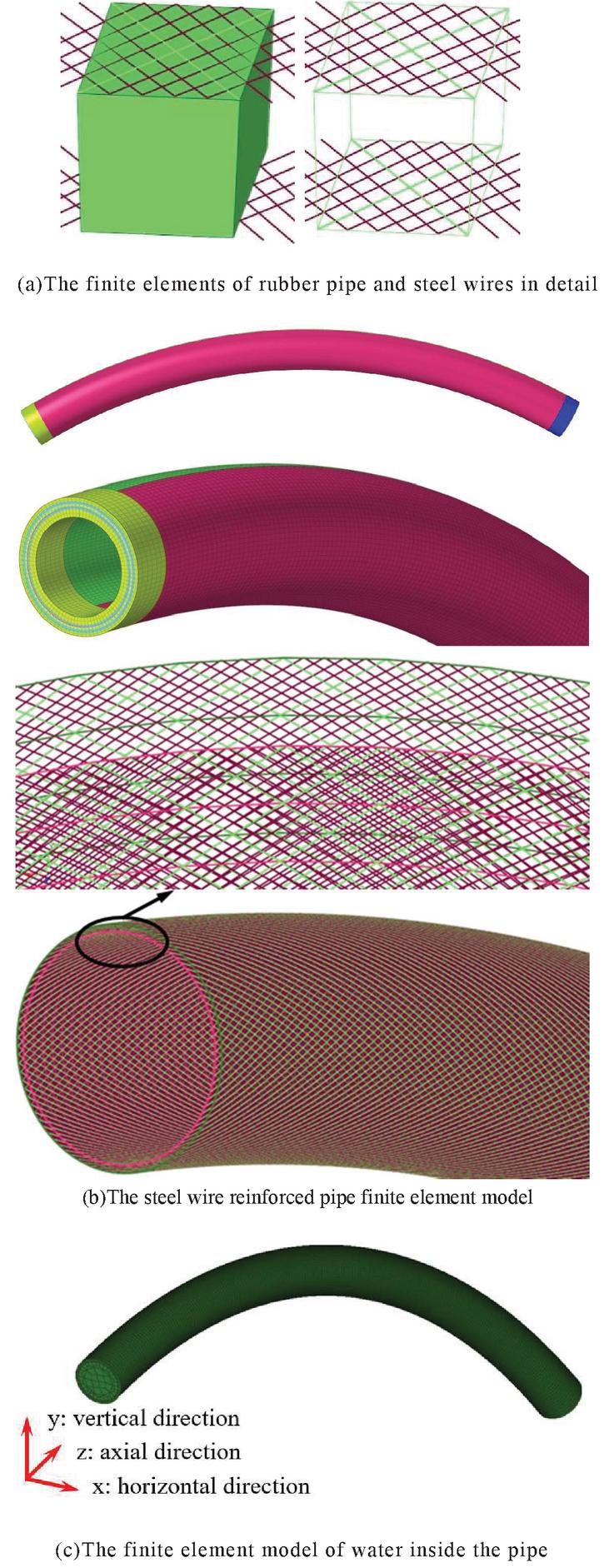
Figure 5 Finite element model of the bending rubber pipe and inner water.
Hexahedron solid elements are built for rubber pipe by dragging 2D quad elements along axial direction. The pipe in thickness direction is meshed with seven layers of elements. 1D rod element is adopted for simulating steel wires in the rubber pipe. Rod elements are built in diagonal direction of a hexahedron element in middle layer of the rubber pipe to simulate the spiral steel wires. The rod elements in middle of rubber solid element connect 3 most nearby solid element nodes through RBE3 constrain equations. The length/width/height of the hexahedron element between two steel wire layers is 2.2 mm/1.13 mm/1 mm. As a result, the helix angle of spiral rod elements connecting diagonal hexa element nodes is 54.6. The diameter of the rod element is 0.6 mm. The total element number of the pipe model is 776790.
The fluid finite element model of water in the pipe is also built with hexahedron element. Non-uniform mesh is adopted in radial direction to balance the computation time and the accuracy. The radial element size is 0.8 mm near the pipe wall and it is 3.8 mm in the middle of the fluid field near the pipe axis. The axial element size is 2.2 mm. The fluid nodes and structure nodes coincide on the FSI coupling surface but being different nodes. The total fluid element number is 38454.
The pipe material is Nitrile Butadiene Rubber (NBR) and the Shore-A hardness of the rubber is 80. The 2nd Mooney-Rivlin constitutive model is used for the rubber simulation because the model is accurate for strain less than 100% when full test data are available and it is easy to converge during simulation. The uniaxial tension test, equibiaxial tension test and planar shear tests are performed to obtain the model parameters. Every test is carried out for 3 times and the mean values are used for model parameters fitting. The material properties are shown in Table 4 and 5. The maximum error between the test data and the fitting data is within 10%.
Table 4 Material Properties for the rubber pipe and water
| Elastic/Bulk | Possion | Density | Viscosity | |
| Material | Modulus (GPa) | Ratio | (Kg/m) | (mPas) |
| Steel | 200 | 0.3 | 7890 | / |
| Nitrile Rubber | 3.3 | 0.499 | 960 | / |
| Water | 2.3 | / | 1000 | 1.01 |
Table 5 Parameters for the 2nd Mooney-Rivlin model of the pipe rubber
| D1 | C10 | C01 | D2 | C20 | C11 | C02 |
| 1.673E-3 | 0.808 | 0.388 | 0 | 1.492 | 3.37 | 1.44 |
3.2 Fluid-structure Coupling Modal Analysis of Steel-Wire-Reinforced Rubber Pipe
The fluid-structure coupling modal simulation of the steel-wire-reinforced flexible pipe filled with water is performed in free-free condition. The first six modal frequencies and corresponding modal shapes are shown in Figure 6.
The modal test of the system is also carried out using LMS.Testlab. The water in the pipe is sealed by rubber cap on both sides. The pipe is suspended by two rubber string. Multi-input multi-output modal test method is used. The pipe is impacted by force hammer at 11 uniformly distributed positions in horizontal and vertical direction. Two three-direction accelerometers is glued in middle and end of the pipe. The vertical rigid body motion modal frequency is 3.79 Hz and the horizontal one is 4.65 Hz, which are much lower than 10% of the first elastic modal frequency. It means the rubber string suspension is good enough for free-free condition.
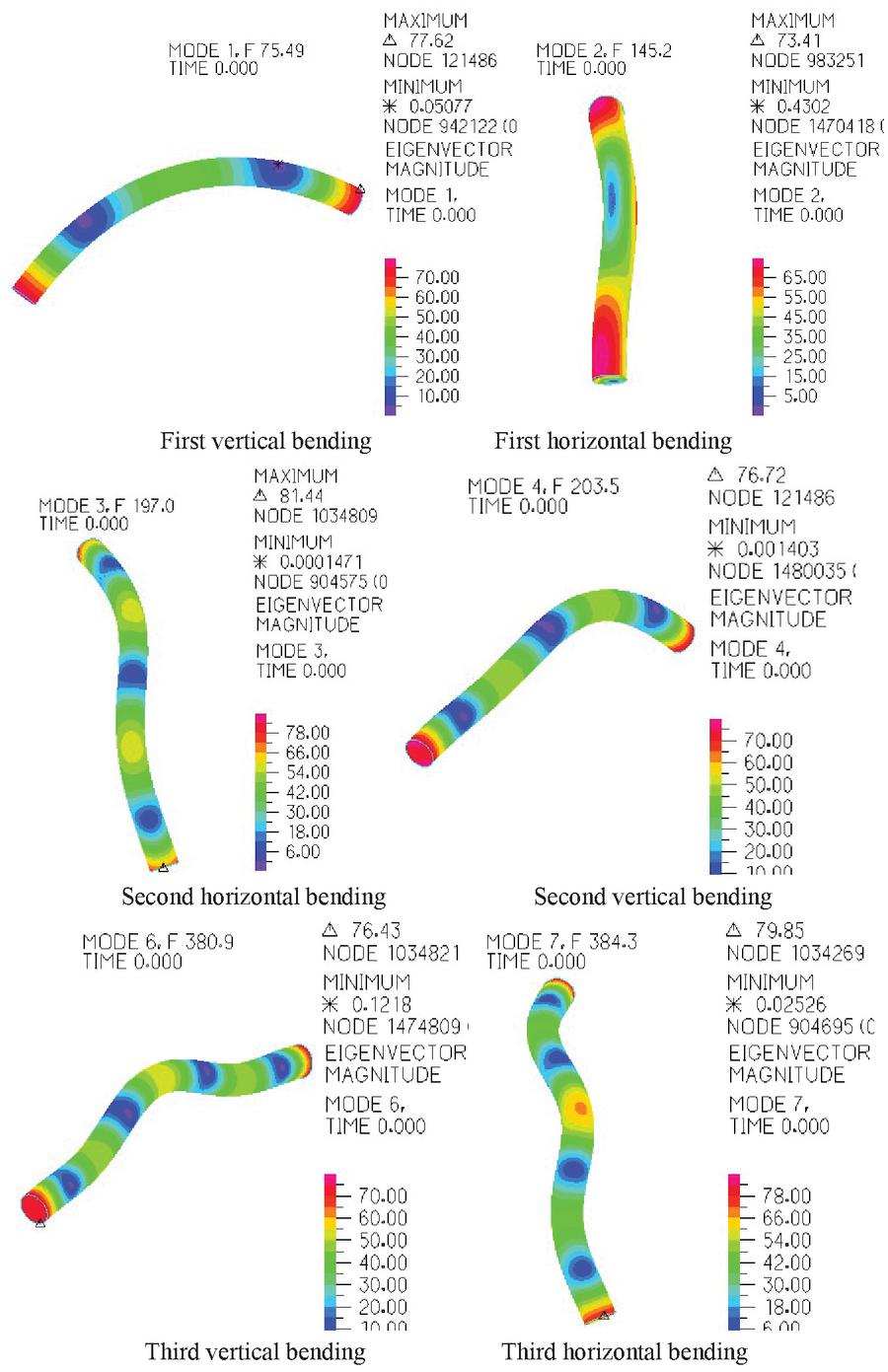
Figure 6 FSI simulation modal shapes of the oil filled pipe in free state.
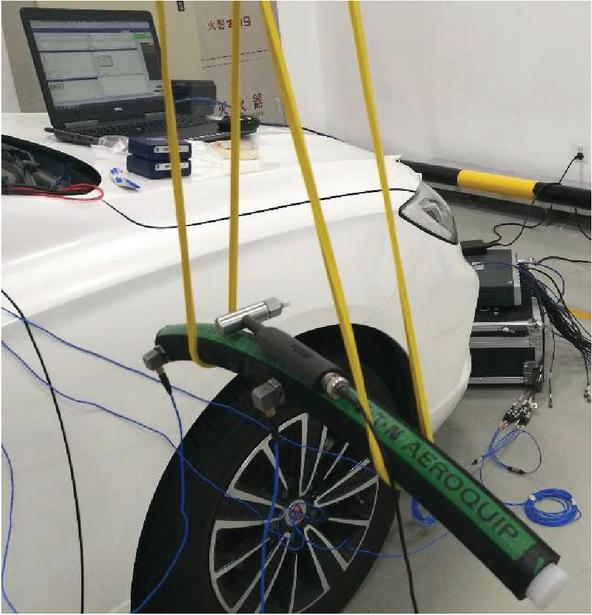
Figure 7 Modal test of the oil-filled pipe.
The modal simulation and modal test result is shown in Table 6 and Figure 7.
The modal frequencies and modal shapes coincide well between simulation result and modal test result within 500 Hz except for the first horizontal bending mode. The first horizontal bending modal frequency is 24.6% higher than that from modal test while the modal shapes are identical. The modal frequency error from simulation result is smaller in high frequency range than that in low frequency range because for high frequency modes the steel wire layers contribute more than rubber material. The steel material is isotropic and the simulation precision is high while rubber material is complicate and it is difficult to simulate in high precision. The comparison between modal test and simulation result shows the finite element FSI model of the water filled pipe is accurate enough to reflect the major dynamic characteristics. It is suitable to be used in dynamic response simulation.
4 Transient Response Analysis of the Flexible Pipe Under Inner Fluid Pressure Impact
4.1 Modal Analysis of the Water-filled Flexible Pipe in Constrain State
Modal simulation of the constrained water-filled pipe is performed before transient response simulation. The finite element nodes on both ends of the pipe are fixed in three directions. The modal parameters are shown in Table 7. The modal shapes are shown in Figure 8. Most of the modes in low frequency are horizontal and vertical bending modes. The modal frequency of the first expansion mode is 491.7 Hz and the second expansion mode is as high as 994.2 Hz.
Table 6 Modal simulation and modal test result
| Modal Frequency | Modal Frequency | |||
| (Hz) | (Hz) | |||
| Order | (Simulation) | (Test) | Modal Shape | Error (%) |
| 1 | 75.5 | 64.7 | First bending (Vertical) | 14.3% |
| 2 | 145.2 | 109.5 | First bending (Horizontal) | 24.6% |
| 3 | 197.0 | 200.3 | Second bending (Horizontal) | 1.67% |
| 4 | 203.5 | 207.5 | Second bending (Vertical) | 1.96% |
| 5 | 380.9 | 378.2 | Third bending (Vertical) | 0.71% |
| 6 | 384.3 | 414.7 | Third bending (Horizontal) | 7.9% |
Table 7 Modal simulation result of the constrained water-filled pipe
| Modal Frequency (Hz) | ||
| Order | (Simulation) | Modal Shape |
| 1 | 83.1 | First bending (Horizontal) |
| 2 | 162.7 | First bending (Vertical) |
| 3 | 213.8 | Second bending (Vertical) |
| 4 | 218.6 | Second bending (Horizontal) |
| 5 | 402.0 | Third bending (Vertical) |
| 6 | 405.6 | Third bending (Horizontal) |
| 7 | 491.7 | First expansion |
| 8 | 944.2 | Second expansion |
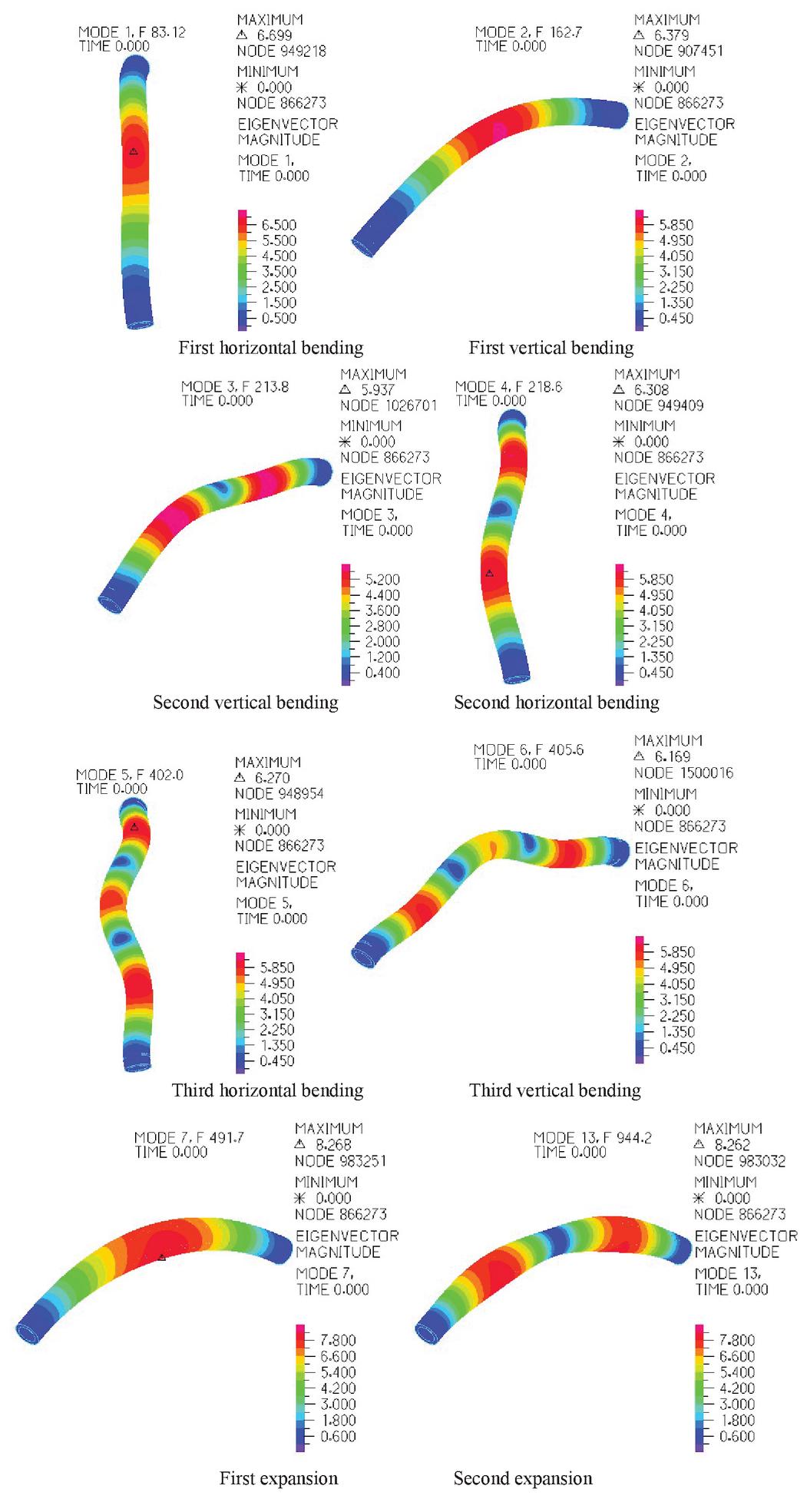
Figure 8 FSI simulation modal shapes of the oil filled pipe in constrained state.
4.2 Transient Response Analysis of the Water-filled Pipe Under Step Pressure Impact with Different Fluid Turbulence Models
Transient simulation of the water-filled pipe is performed using ADINA software to research the dynamic response characteristics of the pipe under different fluid pressure excitations. The pipe is fixed on two ends. The fluid step impact pressure is imposed on both sides of fluid end surface. The imposed fluid pressure rises quickly from 0 to 1.5 MPa in 0.2 ms and keeps constant. The dynamic viscosity of the water is 1.01 mPa.s. The maximum axial fluid velocity under 1.5 MPa pressure impact is 2.5 m/s. The Reynolds number is:
So turbulence flow model is used for fluid simulation in the curved pipe. Three different turbulence models are used for comparison: Standard k- model, LES with Smagorinsky-Lilly subgrid model, S-A/DES model. The time step of the transient FSI simulation is 0.1ms and the total solution time is 1 s. As a result, when time response is transformed to frequency domain by Fast Flourier Transformation (FFT), the frequency resolution is 1Hz and the maximum analysis frequency is 5000 Hz.
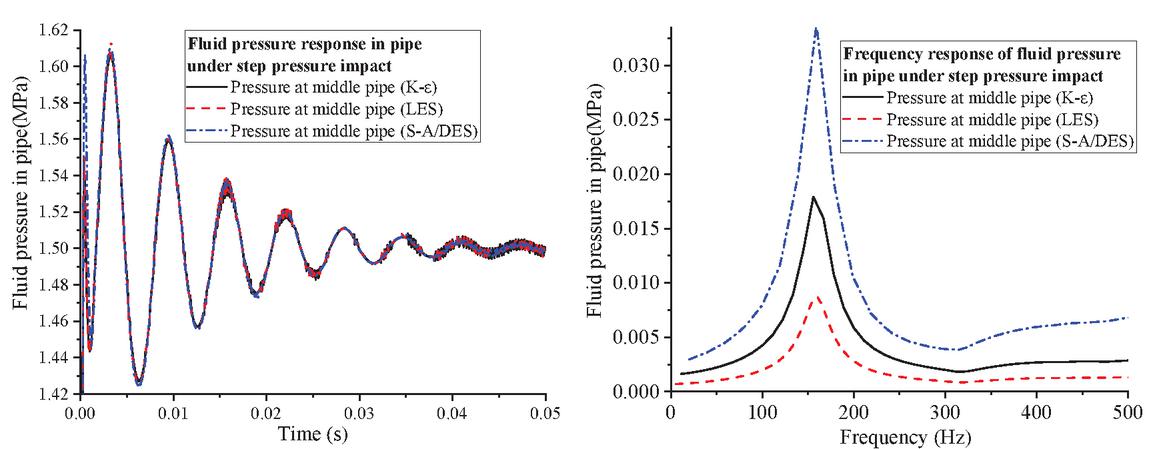
Figure 9 The pressure response after pressure impact.
The fluid pressure response and distribution is shown in Figure 9. It decays quickly in 0.05 s. The pressure oscillation amplitude of the LES model is smaller than that of the k- model after 0.07 s. In frequency domain the peak frequency is 160 Hz which is consistent with the first vertical bending mode of the water-filled pipe. It means the Possion coupling between the water and pipe is strong. The pressure oscillation is mainly influenced by the first vertical bending mode.
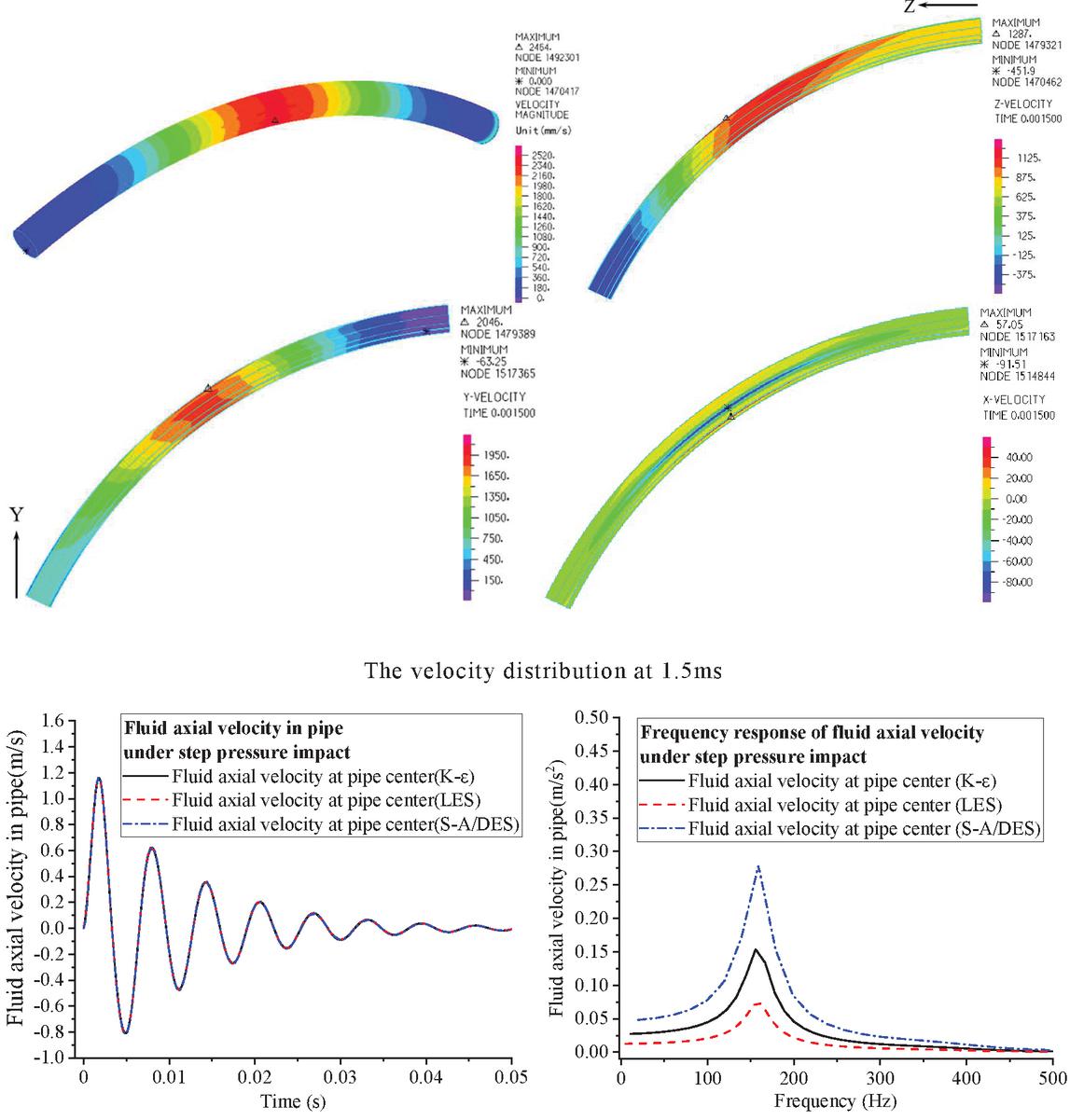
Figure 10 The fluid velocity at center of the pipe.
The maximum axial fluid velocity is 2.46 m/s which lies in the middle of the pipe. The fluid velocity decays quickly within 0.05 s. In the middle cross section of pipe there are vortexes rotating around axial lines on both sides of the pipe. The water flows upward along the vertical middle line of the pipe cross section and flows to two sides. The maximum rotating fluid velocity in horizontal X direction (vertical to bending pipe plane) is 0.09 m/s. The axial fluid velocity obtained with LES model is 30% smaller than that obtained with k- model at decaying stage. In frequency domain the peak frequency of fluid axial velocity oscillation is 160 Hz. It is consistent with the first vertical bending modal frequency.
The vertical acceleration of the pipe in the middle position obtained with different turbulence flow models are shown in Figure 11.
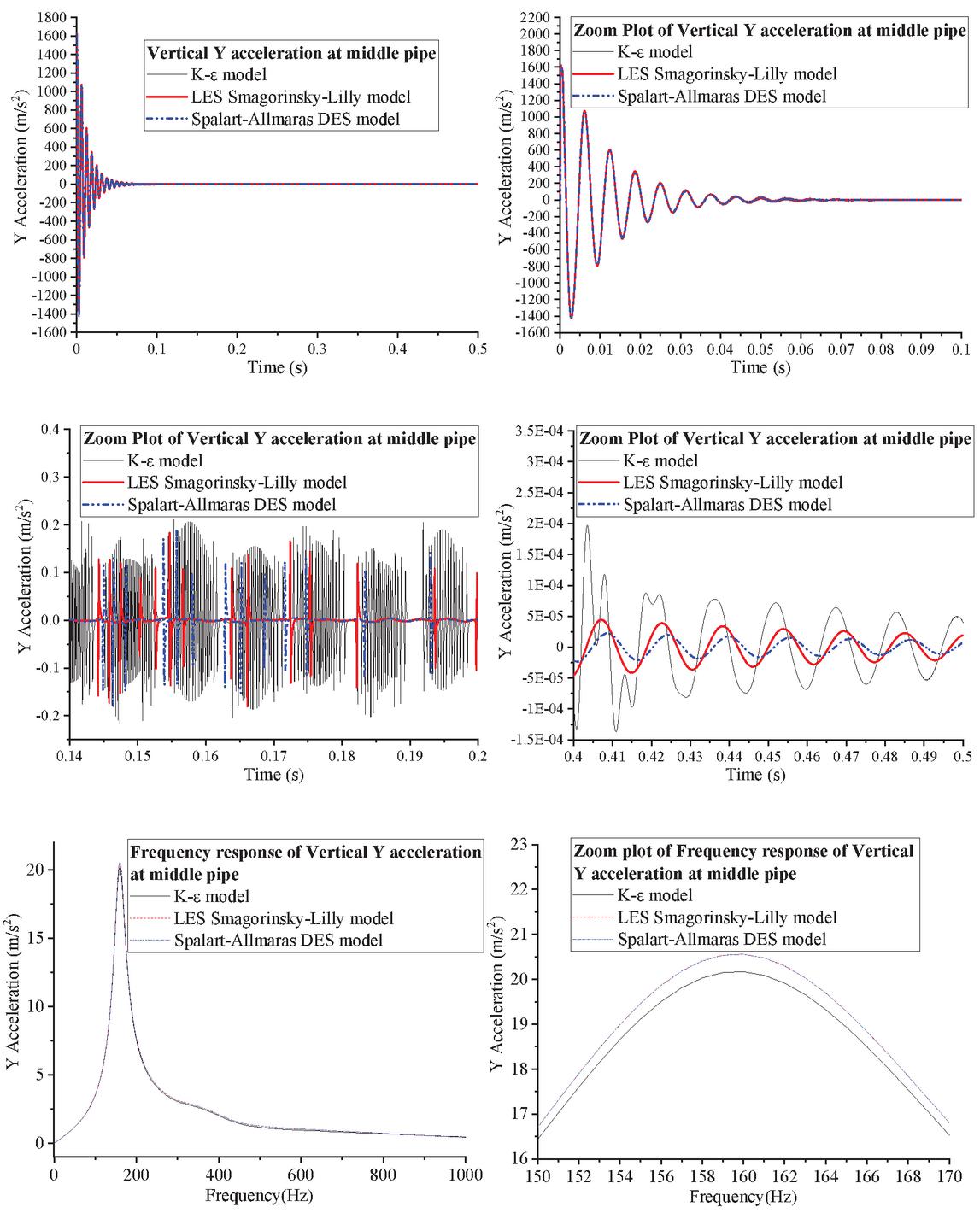
Figure 11 The vertical acceleration at middle of the pipe under pressure impact (The right figures are zoom plots of right figures).
The acceleration of the pipe in time domain is almost the same within 0.05 s for different turbulence models. The maximum vertical acceleration is 1600 m/s. The acceleration decays in the form of beat vibration for k- model while it decays in the form of periodic impulse for LES and S-A/DES models at time 0.1 s–0.2 s. The fluid pressure and velocity major oscillation frequency 160 Hz is consistent with pipe major vertical acceleration, which is largest for pipe using fluid k- turbulence model. They decay in sine form after 0.45 s. The oscillation amplitude for the k- model is 1 times larger than that for LES and S-A/DES models. In frequency domain, the peak frequency is 160 Hz which coincides with the first vertical modal frequency. It means the first vertical bending mode contributes the most to the pipe vertical acceleration response. The vertical acceleration at 160 Hz is 20.5 m/s for LES and S-A/DES model while it is 20 m/s for the k- model. The frequency responses of the pipe are almost the same for LES and S-A/DES model. The LES and S-A/DES turbulence model could both be used to simulate the segregated and vortex flow at high velocity. They are suitable for simulating flow in bending pipe with small fluid element size.
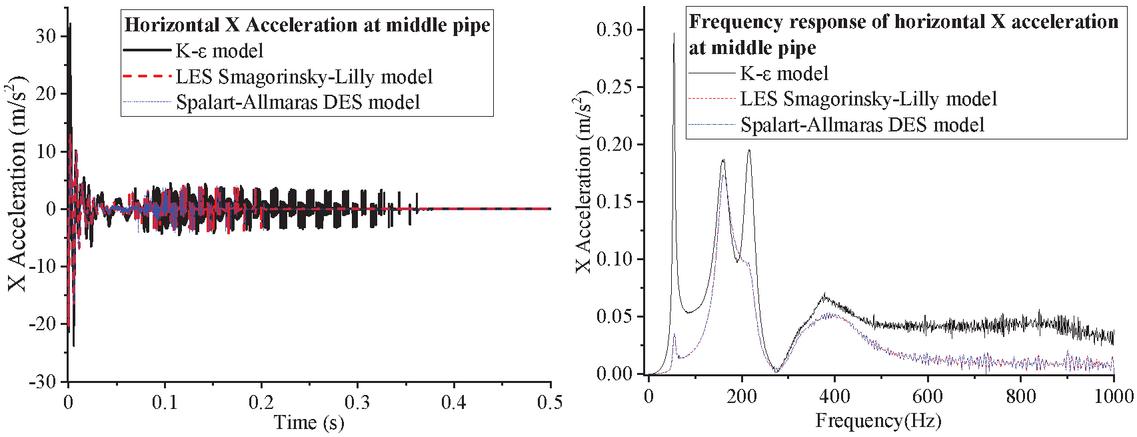
Figure 12 The horizontal acceleration at middle of the pipe under pressure impulse.
The pipe horizontal acceleration response (vertical to bending pipe plane) is much smaller than vertical one under fluid pressure impact. The maximum horizontal acceleration is 30 m/s which is 18.75% of maximum vertical one. But it decays much slow. The pipe horizontal acceleration at 0.5 s for k- model is 5 mm/s while the vertical one is 0.05 mm/s. The pipe horizontal acceleration response is almost the same obtained using LES and S-A/DES turbulence model within 0.05 s. The pipe horizontal beat vibration occurs when using k- model because the pipe vibration response is higher than that using other turbulence models and it couples with fluid pressure oscillation at frequency 160 Hz. In the decaying stage after 0.4 s, the pipe horizontal acceleration using k- model is 2 times as large as that using LES model and 3.7 times as large as that using S-A/DES model. In frequency domain, there are obvious 4 peaks for horizontal (X) acceleration of the pipe using k- model at frequencies of 54 Hz, 160 Hz, 215 Hz, 386 Hz. The peak frequencies are consistent with the fluid-structure coupling modes: first horizontal bending mode, first vertical bending mode, second horizontal bending mode, third horizontal bending mode. The frequency responses of the pipe using LES and S-A/DES model are almost the same and the peak value is relatively small at frequency of 54 Hz and 215 Hz. It means the pipe horizontal vibration is mainly contributed by the first vertical bending mode using LES or S-A/DES turbulence model. Because vortex flow in circled pipe could only be modeled by LES or S-A/DES turbulence model. So much energy is consumed by vortex flow as a result the horizontal coupling with pipe is weak. The horizontal frequency acceleration response of the pipe using k- turbulence model is both contributed by horizontal modes and vertical modes. The flow couples strongly with the pipe in horizontal direction when using k- model. The pipe horizontal accelerations at 11 uniformly distributed points along the pipe at 54 Hz, which is generally called operational modal shape is shown in Figure 12. It is similar with the first horizontal bending modal shape which means the pipe response at 54 Hz is mainly contributed by the first horizontal bending mode.
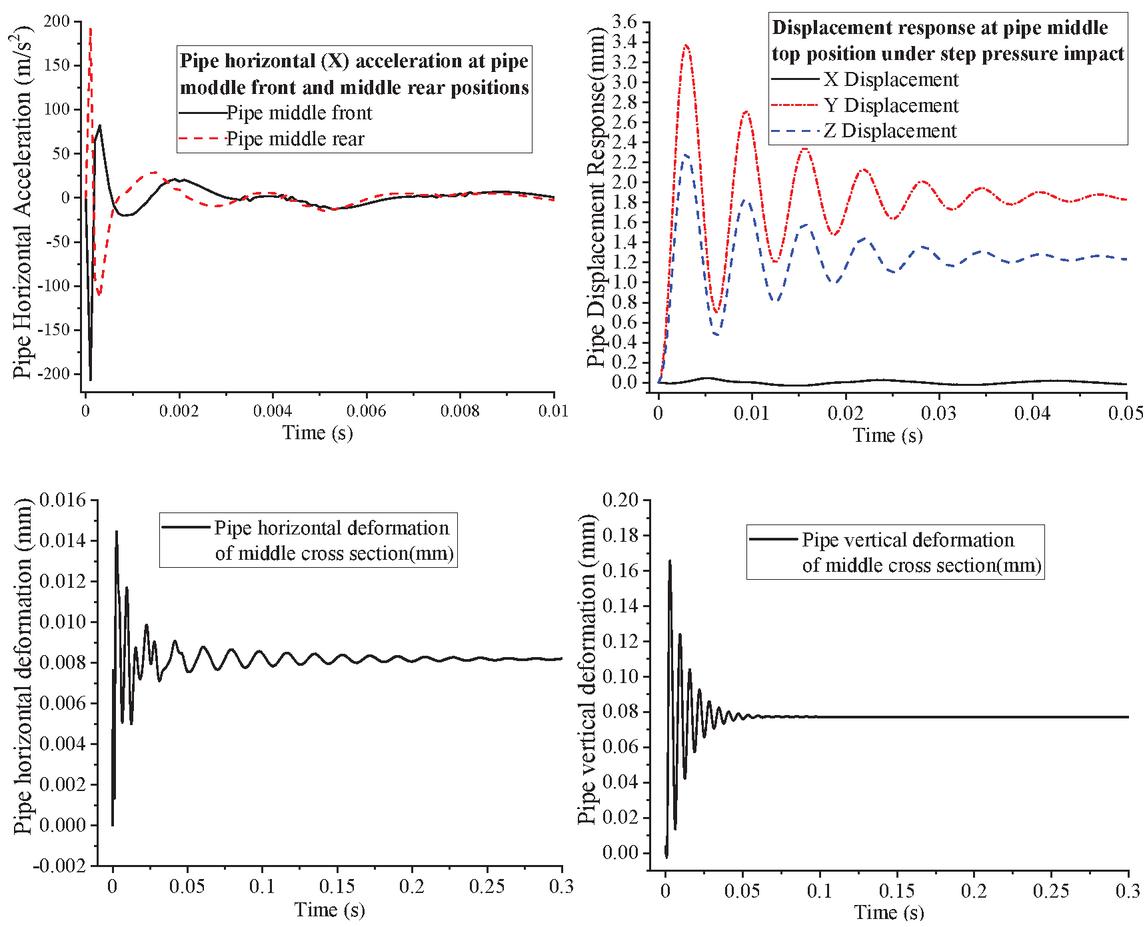
Figure 13 The response at middle pipe using LES turbulence model.
The horizontal acceleration of the pipe at middle front and middle rear position is in reverse phase within 3ms and the maximum amplitude is 200 m/s. The relative horizontal displacement of the pipe between middle front and middle rear position is shown in Figure 13. The relative vertical displacement of the pipe between middle top and middle bottom position is also obtained. The maximum front-rear deformation is 0.014 mm while the maximum top-bottom vertical deformation is 0.16 mm. It shows the pipe deforms in oval shape under pressure impact and the vertical deformation is much larger than horizontal deformation. However, the vertical deformation decays much faster than horizontal one. In stable state under 1.5 MPa pressure the pipe vertical deformation is 0.078 mm and the horizontal one is 0.008 mm.
4.3 Transient Response Analysis of the Water-filled Pipe Under Different Fluid Pressure Impact
Different step pressures of 0.5 MPa, 1 MPa, 1.5 MPa are imposed on fluid surfaces at both ends of the pipe as shown in Figure 14. The pressure increases from 0.1 MPa to maximum value in 0.2 ms and then keeps constant in simulation time until 1 s. The acceleration of the pipe under different step pressure impact are shown in Figure 15. The peak frequencies are shown in Table 8.
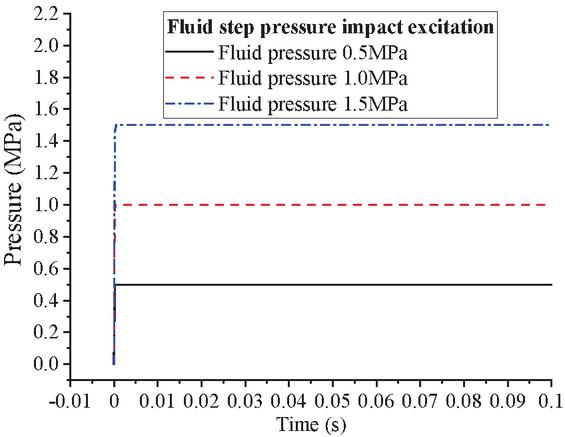
Figure 14 Different step pressure impact excitations.
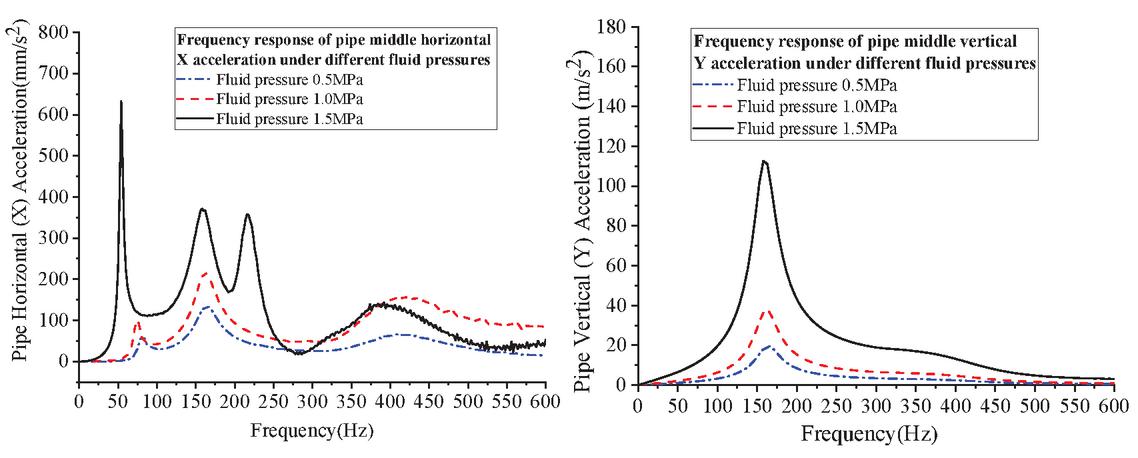
Figure 15 The acceleration response in the middle of the oil-filled pipe under different pressures.
When fluid step pressure increases from 0.5 MPa to 1.5 MPa, the acceleration response peak frequency decreases and the peak value increases. The first horizontal X acceleration peak frequency decreases from 81.95 Hz to 54.29 Hz and the first vertical Y acceleration peak frequency decreases from 163.89 Hz to 157.95 Hz. Because the response peak is mainly contributed by corresponding mode at the same frequency. As a result the modal frequency of the water filled pipe decreases when inner fluid pressure increases. There is no obvious response peak above 600 Hz. One reason is the impact energy in high frequencies is not enough to excite the mode. The other reason is the system damping is large which restrains the response in high frequency.
Table 8 Pipe peak frequency with different inner fluid pressures
| First Peak | Second Peak | ||
| Direction | Fluid Pressure (MPa) | Frequency (Hz) | Frequency (Hz) |
| X | 0.5 | 81.95 | 163.89 |
| 1.0 | 75.83 | 161.13 | |
| 1.5 | 54.29 | 157.95 | |
| Y | 0.5 | 163.89 | |
| 1.0 | 161.13 | ||
| 1.5 | 157.95 |
4.4 Transient Response Analysis of the Water-filled Pipe Under Sine Pressure Impact
The steel-wire-reinforced flexible bending pipe full of water is fixed on two ends. The pressure is imposed on two end surfaces of the inner fluid. LES turbulence model is used for the inner flow simulation. The pressure increases from 0.1 to 1.5 MPa within 0.5 ms and the pulse period is 1 ms. The impact pressure is shown in Figure 16. The pressure distribution at 1.6 ms is shown in Figure 17. The maximum fluid pressure is 1.53 MPa which lies in middle and near inner side of the bending pipe.
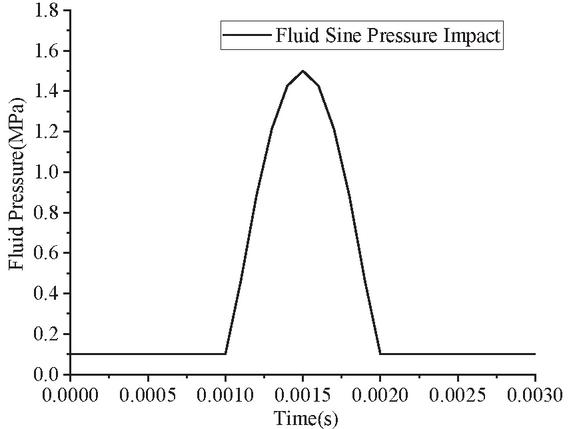
Figure 16 The half-sine-shape pressure excitation.
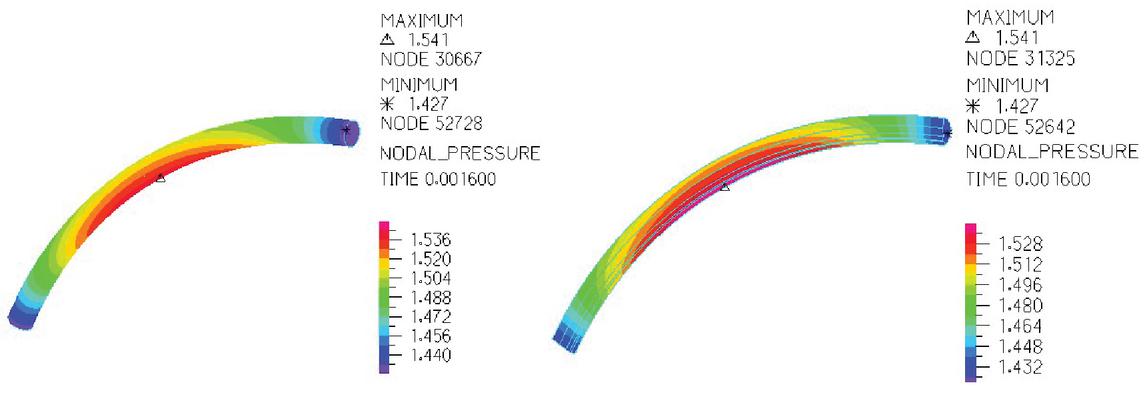
Figure 17 Fluid pressure distribution at 1.6 ms.
The fluid velocity distribution at 1.6 ms is shown in Figure 17. The fluid flows from two sides to middle of the pipe. The maximum fluid velocity is 780 mm/s which lies at end of the pipe. There is vortex flow in middle of the pipe. It flows upward from bottom to top of pipe and flows to both sides. The maximum horizontal flow velocity is 92 mm/s.
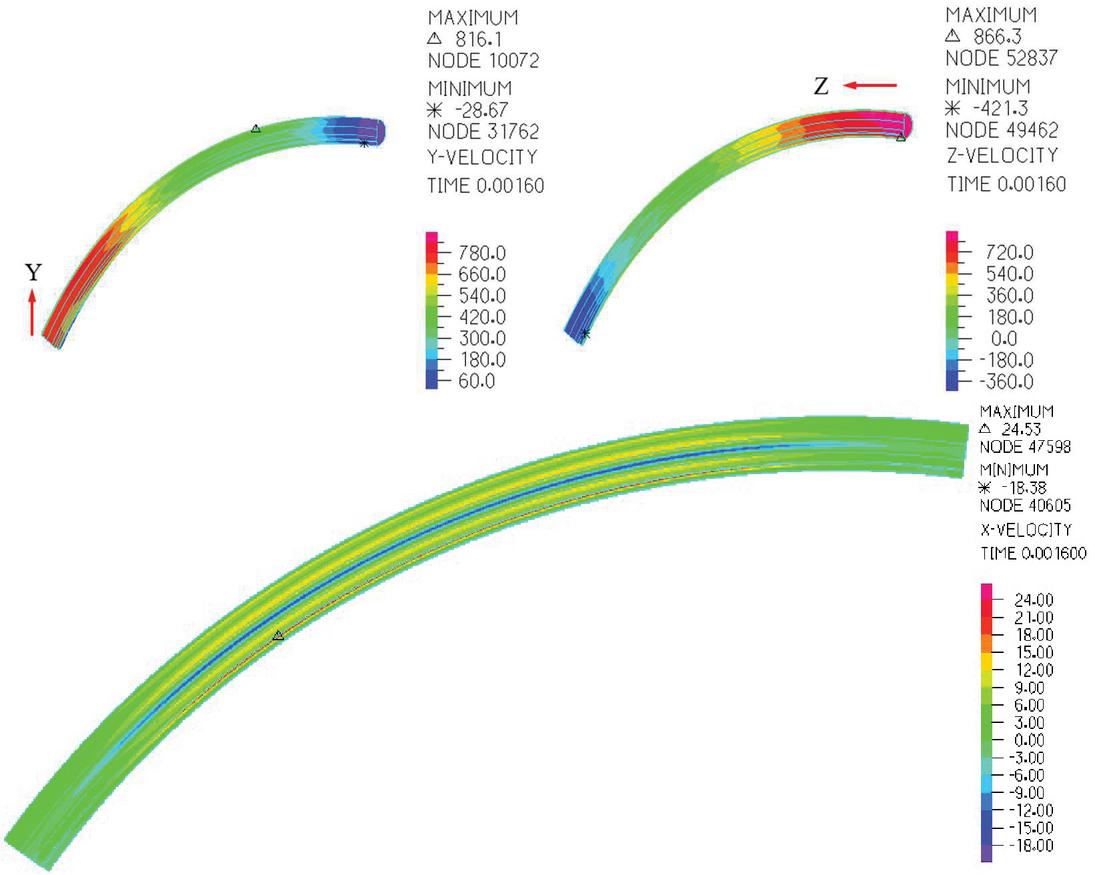
Figure 18 The flow velocity distribution at 1.6ms.
The horizontal (X direction) acceleration response at the pipe middle position is shown in Figure 18. The maximum X acceleration is 25 m/s, which is 48% larger than that under step pulse impact. But it decays quickly and the magnitude is negligible after 0.05 s. There is no periodic pulse acceleration response after 0.06 s comparing with that under step pulse impact as shown in Figure 19. There are peak acceleration responses at 84 Hz, 166 Hz and 402 Hz, which coincide with first horizontal bending mode, first vertical bending mode and third horizontal bending mode. The peak frequency under sine-shape pressure impact is larger than peak frequency (54 Hz, 160 Hz, 386 Hz) under step pressure impact. The reason is that the stable fluid pressure after sine-shape impact in the pipe is 0.1 MPa. It is much small comparing with 1.5 MPa after step pressure impact. Due to the modal frequency increases when inner fluid pressure decreases, so the induced response peak frequency is high.
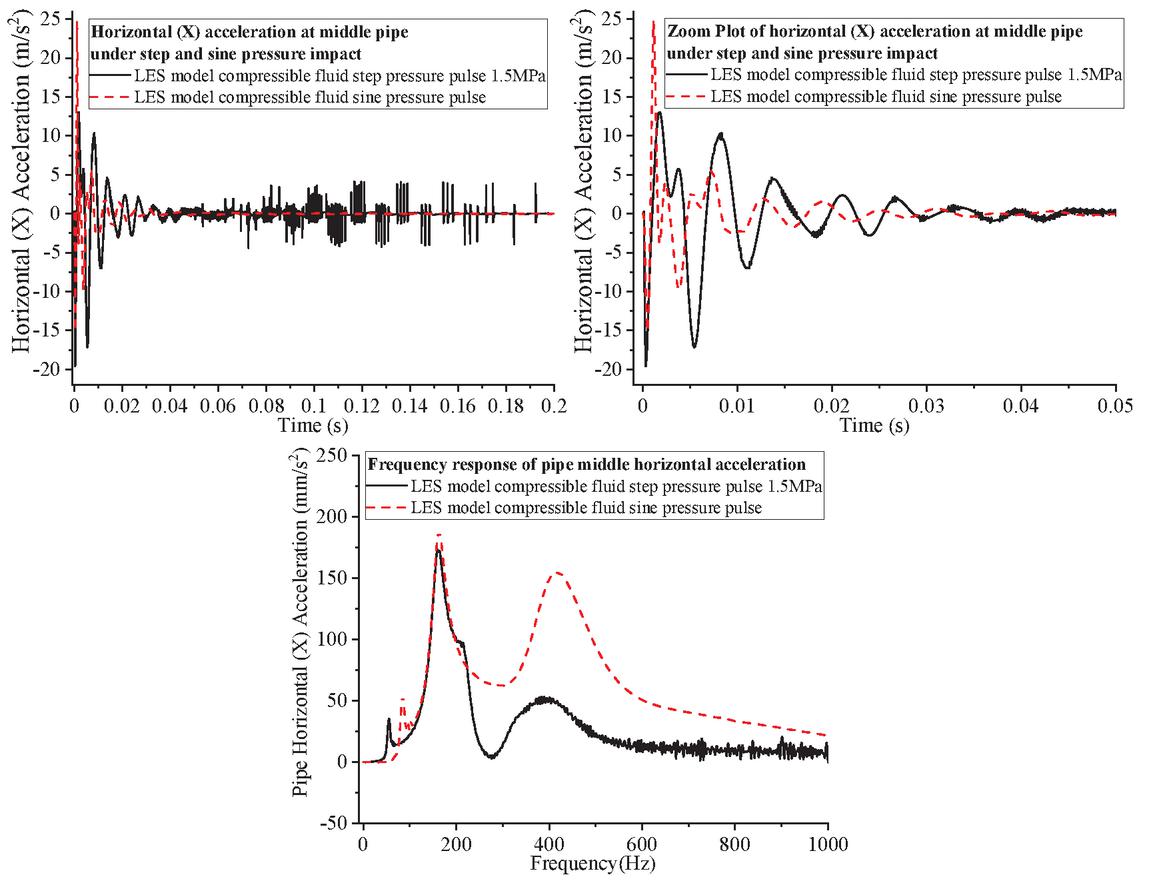
Figure 19 The horizontal acceleration of the pipe at middle position under sine and step pressure impact.
In frequency domain, there are also three horizontal X displacement response peaks at 84 Hz, 162 Hz, 402 Hz. The maximum horizontal displacement is 0.2 m at 84 Hz. The horizontal displacement frequency responses at different positions along pipe at 84 Hz and 402 Hz are shown in Figure 20. The response curve shape is similar to modal shape at the same frequency. It shows the pipe response at the frequency is mainly contributed by the corresponding mode.
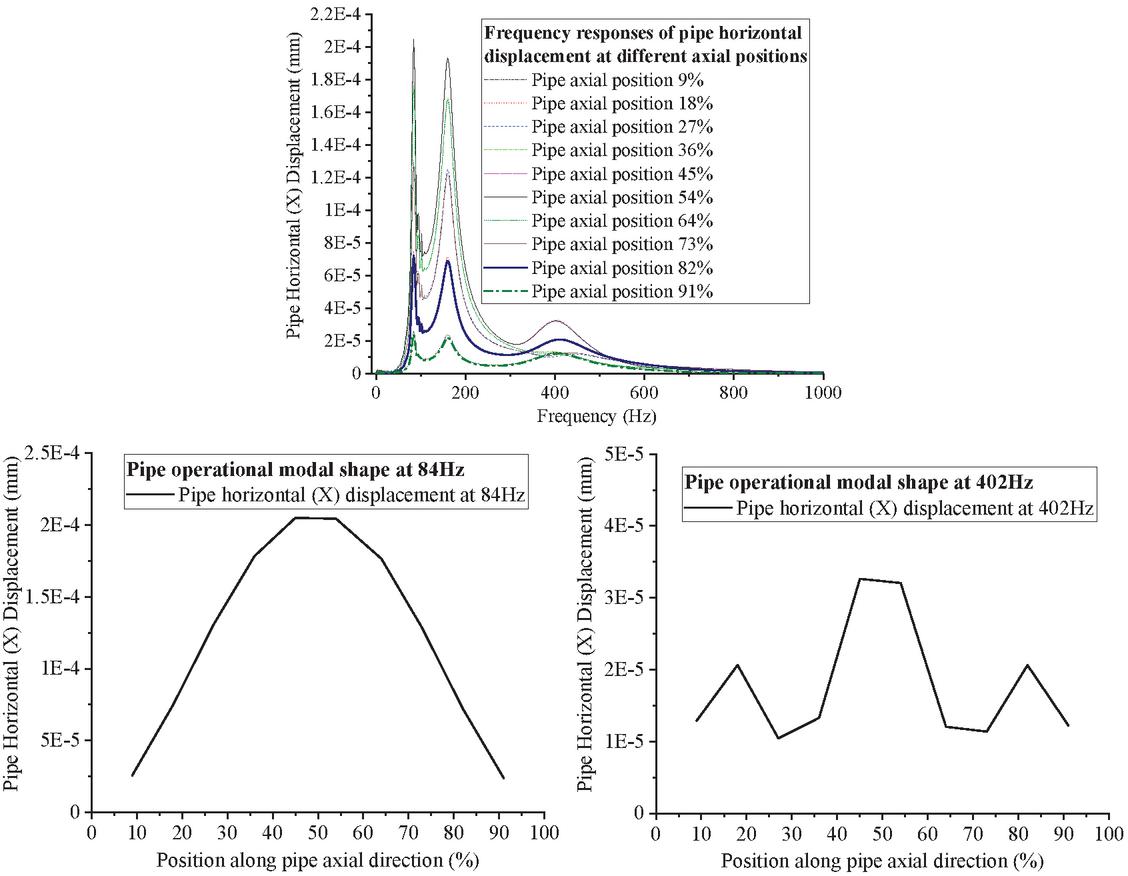
Figure 20 The horizontal displacement frequency response of the pipe at different positions and the operational modal shapes at 84 Hz and 402 Hz.
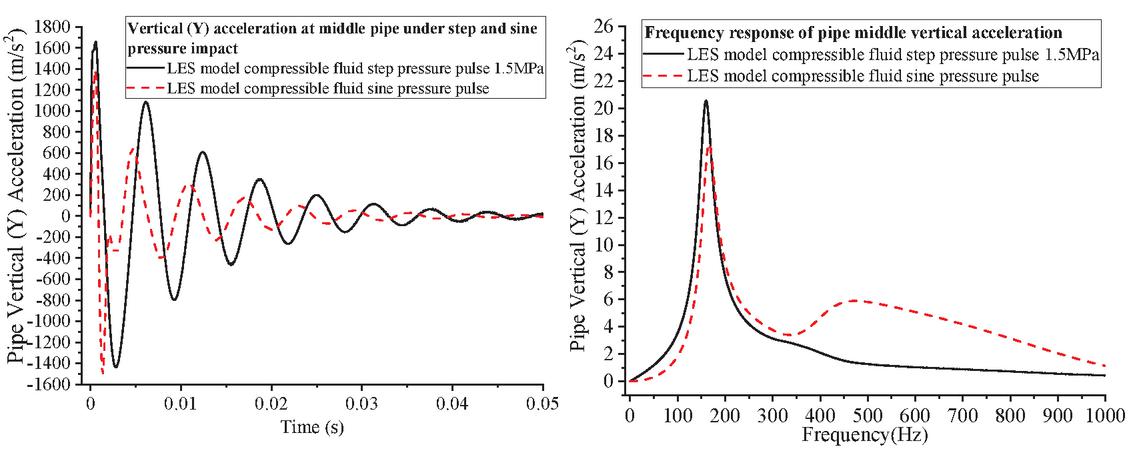
Figure 21 The vertical acceleration of the pipe at middle position under sine and step pressure impact.
The maximum vertical Y response at pipe middle position is 1500 m/s. The vertical acceleration decays faster than that under step pressure impact as shown in Figure 21. It is rather small after 0.12 s and no periodic pressure pulse occurs in decaying process. The vertical acceleration peak frequency is 166 Hz under sine-shape pressure impact which is larger than peak frequency 160 Hz under 1.5 MPa step pressure impact.
The vertical displacement frequency responses of the pipe at different positions are shown in Figure 22. There are peaks at 166 Hz and 406 Hz which coincide with first vertical bending and third vertical bending mode. The maximum displacement is 0.028 mm at 166 Hz. The vertical displacement operational modal shape at 166 Hz and 406 Hz are shown in Figure 22. It shows again the pipe response at peak frequency is mainly contributed by corresponding mode.
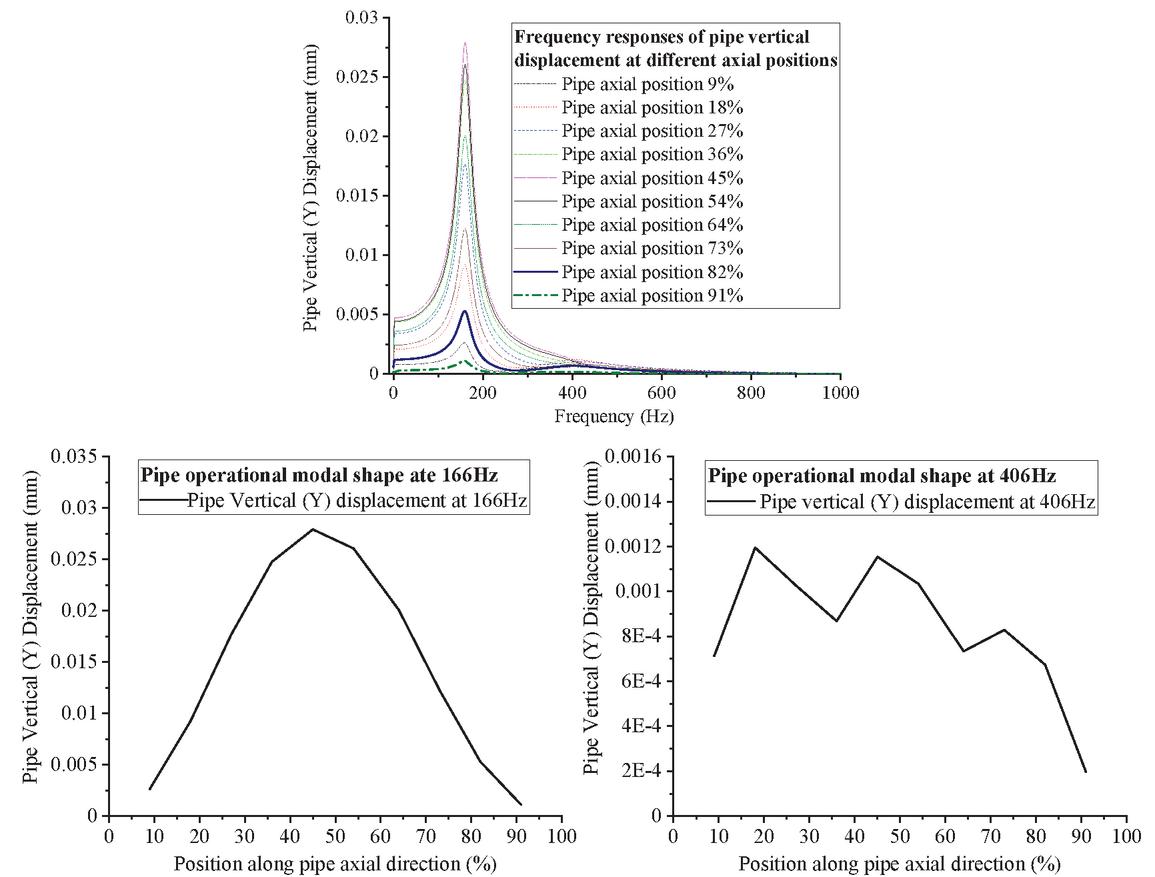
Figure 22 The vertical displacement frequency response of the pipe at different positions and the operational modal shapes at 166 Hz and 406 Hz.
The horizontal (X direction) and vertical (Y direction) deformation of the pipe at middle position under sine-shape pressure impact is shown in Figure 23. The maximum horizontal deformation is 8 m. The maximum vertical deformation is 35 m which is 4.375 times as large as horizontal one. The deformation decreases quickly with time. At 0.5 s the horizontal expansion magnitude is 0.048 m. The vertical expansion at 0.5 s is 0.32 m which is 6.6 times as large as horizontal one. It shows the horizontal deformation decreases faster than vertical one under sine pressure impact.
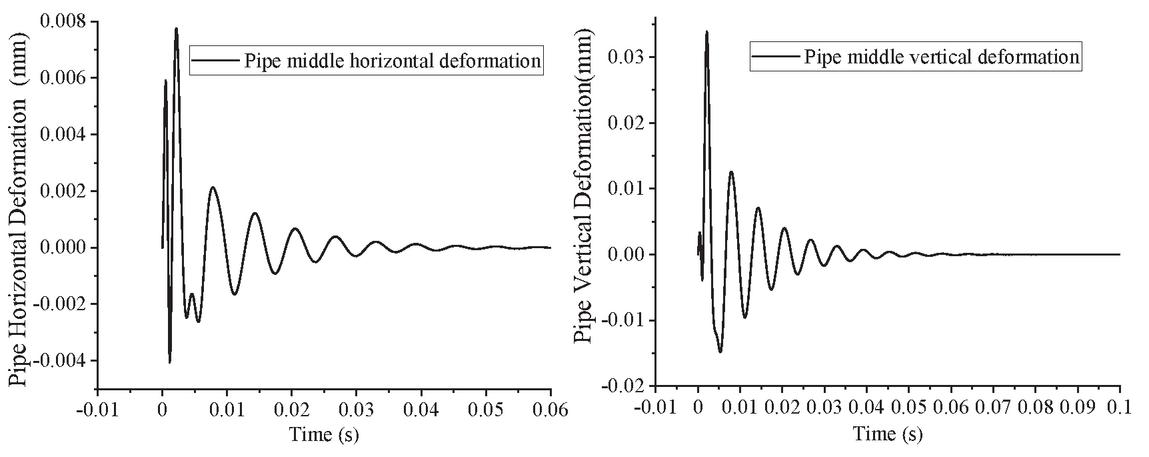
Figure 23 The horizontal and vertical pipe deformation at middle position.
5 Conclusion
Transient dynamic FSI simulation of water filled steel-wire-reinforced rubber pipe is performed under inner fluid pressure excitation. Modal simulation of an oil filled T-shape pipe is carried out to validate the proposed fluid-structure coupling method. An innovative way of building finite element dynamics model of spiral steel-wire-reinforced rubber pipe is proposed. The model accuracy is validated by modal test of the water-pipe system. The transient dynamic fluid-structure coupling analysis of the complicate pipe with nonlinear material is performed for the first time.
1. The steel-wire-reinforced rubber pipe finite element model is built from modular hexahedron elements with rod elements connecting solid element nodes in diagonal direction. The helix angle and diameter of the rod elements is the same as steel wires in real pipe construction. The material parameters of the pipe are obtained from experiments. The pipe model is validated by fluid-structure coupling modal test which shows it is an effective method in modelling complicated steel-wire-reinforced pipe.
2. In both time and frequency domain, the pipe acceleration response peak values using k- model are larger than that using other turbulence models. The reason is that LES and S-A/DES model could simulate vortex or rotating flow in the pipe which consume much energy so the fluid kinematic energy coupling with pipe structure is smaller than that using k- turbulence model. S-A/DES turbulence model is recommended for fluid-structure coupling dynamic simulation of circled pipe because of vortex simulation capability and high efficiency.
3. The horizontal coupling modal frequency of water-filled pipe decreases fast when the inner oil pressure increases from 0.5 MPa to 1.5 MPa. Because the pipe deforms in oval shape under step pressure impact and the pipe vertical displacement at stable pressure state is 9 times larger than horizontal one. So the pipe horizontal stiffness decreases fast when fluid pressure increases.
4. The pipe response peak frequency under sine pressure impact is larger than that under step pressure impact because the stable pressure after sine pressure impact is low. The operational modal shapes of the pipe under pressure impact show the pipe response at peak frequency is mainly contributed by related fluid-structure coupling mode. It indicates fixing pipe at anti-node positions helps to reduce vibration.
References
[1] Paidoussis MP. Dynamics of flexible slender cylinders in axial flow part 2: experiments. J Fluid Mech 1966; 26: 737–751.
[2] Tijsseling A. Fluid-structure interaction in liquid-filled pipe systems: a review. J Adv Acoust Vib Vol. 10, 2001: 109–146.
[3] Wang L and Ni Q. Vibration of slender structures subjected to axial flow or axially towed in quiescent fluid. J Fluid Struct 2009: 109–146.
[4] Wiggert DC and Tijsseling AS, Fluid transients and fluid-structure interaction in flexible liquid-filled piping, ASME Applied Mechanics Reviews, Vol. 54, 2001: 455–481.
[5] Zhang L, Tijsseling AS, and Vardy AE, FSI analysis of liquid-filled pipes, Journal of Sound and Vibration 224(1), 1999: 69–99.
[6] Vardy AE, Fan D, and Tijsseling AS. Fluid/structure interaction in a T-piece pipe, Journal of Fluids and Structures Vol. 10, 1996: 763–786.
[7] L.C. Davidson, J.E.Smith, Liquid-structure coupling in curved pipes, Shock and Vibration Bulletin 40 (Part4), 1969: 197–207.
[8] L.C. Davidson, D.R.Samsury, Liquid-structure coupling in curved pipes-II, The Shock and Vibration Bulletin 42 (Part1) 1972:123–136.
[9] F.J. Hatfield, D.C. Wiggert, R.S. Otwell, Fluid structure interaction in piping by component synthesis, ASME Journal of Fluids Engineering 104(3) (1982) 318–325.
[10] S.Z. Zhao, X.Y. Xu and M.W. Collins. The numerical analysis of fluid–solid interactions for blood flow in arterial structures Part 2: development of coupled fluid–solid algorithms. Proc Instn Mech Engrs Vol 212 Part H. 1998.
[11] Jia Wu, Shuiying Zheng, Chao Wang, Zhenping Yu. Study on pipeline self-excited vibration using transient fluid-structure coupling method. The International Journal of Advanced Manufacturing Technology (2020) 107:4055–4068.
[12] Jari Hyvarinen, Matts Karlsson and Lin Zhou. Study of concept for hydraulic pipe dynamics investigations to enable understanding of the pipe fluid – structure interaction behavior. Advances in Mechanical Engineering. 2020, Vol. 12(4) 1–18.
[13] Yuanzhi Xu, D. Nigel Johnston, Zongxia Jiao, Andrew R. Plummer. Frequency modelling and solution of fluid-structure interaction in complex pipes. Journal of Sound and Vibration. 333, 2014:2800–2820.
[14] J.E. Drew, D.K. Longmore and D.N. Johnston. Measurement of the longitudinal transmission characteristics of fluid-filled hoses. Proc Instn Mech Engrs. Vol. 211, 1997: 219–227.
[15] Jia Wu, Chunjie Li, Shuiying Zheng, Jingheng Gao. Study on Fluid-Structure Coupling Vibration of Compressor Pipeline. Shock and Vibration. Volume 2019, 2019. 1–12.
[16] Haiyan Qiang, Wanli Li, Junqi Xu, Yanran Wang. Experimental test and numerical analysis for curvature ratios effect on the heat transfer and flow characteristics of a multi-layer winding hose. International Journal of Distributed Sensor Networks. Vol. 15(4), 2019: 1–9.
[17] D.K. Longmore, A. Schlesinger. Transmission of vibration and pressure fluctuations through hydraulic hoses. Proc Instn Mesh Engrs, Vol. 205, 1991: 98–104.
[18] Tijsseling A.S. An overview of fluid-structure interaction experiments in single-elbow pipe systems. J Zhejiang Univ Sci A 20(4), 1996: 233–242.
[19] Pittard M.T., Blotter J.D. Numerical modeling of LES based turbulent flow induced vibration. ASME International Mechanical Engineering Congress & Exposition. 2003: 65–78.
[20] Pittard M.T., Evans R.P., Maynes R.D. et al. (2004) Experimental and numerical investigation of turbulent flow induced pipe vibration in fully developed flow. Rev Sci Instrum 75(7):2393.
[21] Bai Y., Xu W., Cheng P., Wang, N., Ruan, W. Behaviour of reinforced thermoplastic pipe (RTP) under combined external pressure and tension. Ships Offshore Structures. 9(4), 2014:464–474.
[22] Yong Bai, Songhua Liu, Peihua Han, Weidong Ruan, Gao Tang & Yu Cao. Behaviour of steel wire-reinforced thermoplastic pipe under combined bending and internal pressure, 3(6), 2018:1–9.
Biography

Zhang Shouyuan is a Ph.D. student at the Tsinghua University since Autumn 2015. He received his Master.Sc. in Vehicle Engineering from the Northeastern University, China in 2008. He has a solid experience in NVH (Noise/Vibration and Harshness) simulation of automobile electrical powertrain and body structure. His Ph.D. work focuses on thermal-fluid-structure simulation of reciprocating seals and flexible pipe used in hydrogas suspension.
European Journal of Computational Mechanics, Vol. 29_4-6, 363–392.
doi: 10.13052/ejcm1779-7179.29463
© 2021 River Publishers