Application of Multi Body System Coupling Dynamic Model in Posture Stability Evaluation of Sports
Haijin Pan
Public Course Department, Hainan Vocational University of Science and Technology, Haikou, 571126, China
E-mail: haimian5851@163.com
Received 21 April 2021; Accepted 27 May 2021; Publication 20 July 2021
Abstract
Due to the lack of more precise and complete data support, the reliability of posture stability evaluation method based on common technology is poor. In the face of such problems, the application of multi-body system coupling dynamic model in the evaluation of sports posture stability is proposed. The coupling dynamic model of human motion posture is established, and the relevant data of human motion posture is collected. The complete data of human motion posture is obtained by solving the dynamic model. Choose the appropriate stability evaluation index, calculate the stability evaluation index, divide the stability level, and realize the evaluation of posture stability. The experimental results show that: the application of multi-body system coupling dynamic model in the stability evaluation method makes the time delay and data error of the evaluation method small, and its overall reliability is improved.
Keywords: Multi body system, coupling dynamic model, athletic sports, attitude stability.
Introduction
For a long time, human beings have been exploring the mysteries of life, and many researchers have been keen on the analysis and research of human body’s own motion. The earliest we can trace back to around 500 BC, in ancient Greece, philosophers have made a high degree of philosophical explanation, description and analysis of the human body’s motion posture [1]. However, this kind of explanation and analysis is only at the level of thinking, without the support of relevant experiments and data. Dating back to the early 17th century, Descartes, a French physicist, established a complex human body structure model, following the view of pure mechanics. This idea is highly innovative and influential. Up to now, this idea is still being applied and improved, and is constantly making achievements [2]. After entering the 21st century, with the rapid development of various new technologies, such as high-speed photography technology, sensor technology, nanotechnology, computer technology and measurement technology [3]. The development of these technologies has made great progress in the research of human motion posture, thus entering the research height of three-dimensional kinematics and spatial mechanics [4]. Human posture is mainly divided into motion posture and static posture. The research of human motion posture is to use various methods to detect and track the motion posture information of human body. In this way, various data information of human motion can be obtained, so as to realize the description and interpretation of human motion posture. With the passage of time, the study of human motion posture is also in-depth step by step, thus forming a new discipline of human motion biomechanics [5].
It is very valuable to detect, track and evaluate human motion posture. It can be applied to athletes’ daily sports training, military training and rehabilitation treatment of children with cerebral palsy, so as to provide more scientific rehabilitation training and treatment programs. The application in the related research of robot is helpful to realize the real-time and accurate control of robot [6]. At the same time, it is also used in aerospace navigation, military reconnaissance, telemetry and other fields [7]. In the field of sports training, the study of human body posture is of great significance to the improvement of athletes’ skills. In the study of human body, posture balance in sports is an important part of physical quality. It is an important index to measure the human body’s own factors and external ability to resist breaking the balance in order to keep the whole body in a stable state. A good balance ability can not only improve the physical fitness, but also improve the physical fitness It can not only help athletes’ outstanding sports performance and avoid injuries in sports, but also reduce the risk of accidental falls and avoid injuries [8–10]. Therefore, it is very important to evaluate the stability of human motion posture. In order to accurately understand the stability of human motion, it is necessary to diagnose the stability ability of human by appropriate and comprehensive methods [11]. The other is to evaluate the stability of some instruments qualitatively and quantitatively [12].
At this stage, the simple sports posture stability evaluation method has been unable to meet the actual application needs. In recent years, some scholars and experts continue to apply new technology to the stability evaluation, but there are always some small problems in the application integration. As we all know, human posture can be divided into many different forms. In sports, human posture can be divided into different forms In this case, the acquisition of attitude data is always a research difficulty, and the reliability of stability evaluation method is always poor due to the lack of big data support [13–15].
Therefore, the application of multi-body system coupling dynamic model in sports posture stability evaluation is proposed to solve the above problems. By considering the human body in motion as a multi-body system, the coupling dynamic model of human motion attitude is established. On this basis, the complete motion attitude data are obtained by solving the model, and the appropriate stability evaluation index is selected to calculate the stability to realize the evaluation of the motion posture stability. Finally, the experiment proves that the method can effectively solve the problems existing in the existing methods, and has certain reference and popularization value.
1 Research on the Application of Multi-body System Coupling Dynamic Model in the Evaluation of Sports Posture Stability
1.1 The Dynamic Model of Motion Attitude Coupling is Established
In the process of motion, human posture is multimodal, which can be regarded as a multi-body system. In this system, there is dynamic coupling between human body and supporting surface, which makes it difficult to evaluate the stability. This is mainly reflected in the fact that the dynamic equation of the system can not be linearized, resulting in many evaluation methods that require the linearization of the system can not be applied [16]. Virtual mechanism method can solve these problems effectively. In mechanism kinematics, in order to analyze the velocity and acceleration of some mechanisms, one or more components connected by kinematic pairs are fictitious on the original mechanism, in which the mass and inertia of the virtual structure of kinematic pairs are zero, and there is no friction between the kinematic pairs [17]. From the perspective of kinematics [18], the 6-DOF virtual mechanism and the -DOF actual attitude of human body system are combined to form an attitude model with degrees of freedom, and then the spatial dynamic model of the system is established [19]. The specific establishment process is as follows:
The whole human motion posture is regarded as a multi-body system, is the center of mass of human body, is the center of mass of supporting surface, the human body and supporting surface are connected flexibly, and the force of supporting surface is simplified as the generalized restoring force exerted on human body, which is related to the inclination angle of human posture. According to the above content, the generalized coordinate of the given system is , is the pitch angle and roll angle of human posture in the inertial coordinate system according to the subscript number order, and the pitch angle and roll angle (i.e. attitude angle) of the virtual mechanism coordinate system of human posture relative to the supporting surface [20, 21]. The definition of attitude angle is consistent with the transformation matrix of connecting support surface. Let the mass of supporting surface be and the mass of human body be .
As for the degree of freedom of motion of human body posture, considering that the weight of human body is relatively large in time, it can significantly affect the swing of limbs. In addition, the working range of support surface is limited, so the center of mass of the system can be simplified as a fixed point. The point located on the axis of the coordinate system near the center of mass of human body can be selected, and its coordinate in the support surface coordinate system is . For convenience, the origin of inertial coordinate system is located at the center of mass of the system. Then:
| (1) |
The homogeneous transformation matrix of the support surface coordinate system to the inertial coordinate system is:
| (2) |
The homogeneous transformation matrix of human body coordinate system to support surface coordinate system is as follows:
| (3) |
The attitude transformation matrix in formula (2) and the pre-transformation matrix are as follows:
| (4) | ||
| (5) |
Where is the attitude change displacement. Based on the above, the dynamic model of human motion posture is established by Lagrange method, expressed as:
| (6) |
In the formula, is the Lagrange function, which is defined as the difference between the kinetic energy and the potential energy of the conservative force system. is time, and the dot above the symbol is the total derivative of time .
| (7) |
In the formula, is the kinetic energy of the system and is the potential energy of the system. After the establishment of human motion posture coupling dynamic model, the relevant data of sports posture are collected and solved.
1.2 Calculating the Posture Data of Sports
Before solving, the data of sports posture are obtained. The attitude measuring device is responsible for obtaining the information of human body motion posture. The motion attitude information obtained by each measuring device can simulate the human body’s motion posture. Each attitude measuring device is corresponding to an important joint of human body. The movement attitude of human body can be determined by the orientation of attitude measuring device, and the action attitude of human body can be transferred to the action posture simulation scene. The motion attitude data of each node of human body can reflect the human motion posture more truly after processing. The attitude measurement device composed of MEMS nine axis sensor is used to measure the posture of human body when it is moving. The three axis accelerometer, gyroscope and magnetometer are integrated on the nine axis sensor. The division of human body structure will be the key to obtain the information of human motion posture. The data of human motion attitude are obtained by the attitude measurement device installed at the key node. According to the physiological structure of human body, the human body is divided into three parts, namely upper limb, trunk and lower limb, with 9 key nodes. In order to accurately obtain the posture information of human body movement, the attitude measuring device is installed in the chest of the upper arm, upper arm, thigh of lower limb, lower leg leg and torso of human body respectively, as shown in Figure 1.
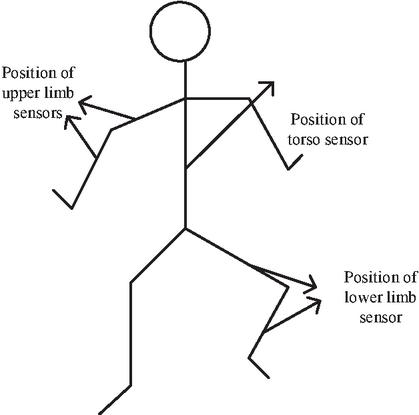
Figure 1 Installation position of measuring device.
In order to avoid the relative displacement between the detection device and the upper and lower limbs of the human body in the process of human movement, large errors will be produced in the measurement results. In the process of installing the measuring device, it should be fixed at the position where the muscle deformation is small and the skin and muscle are relatively flat.
After obtaining the attitude related data, the motion attitude is calculated according to the relative position relationship between the dynamic model and the coordinate system, and the Euler angle method is used to solve the motion attitude. Euler angle method is also known as three parameter method. It obtains attitude azimuth angle, pitch angle and roll angle by solving Euler differential equation. These three parameters are represented by , and respectively. The corresponding coordinate system can be obtained by rotating , and according to different axes. The angular velocity vector of the carrier coordinate system relative to the navigation coordinate system is defined as:
| (8) |
Through the above contents, we can get the projection along the carrier coordinate system, and the angular velocity of the carrier coordinate system relative to the navigation coordinate system along the three coordinate axes of the carrier coordinate system. Through the above calculation process, the data of sports posture can be solved.
1.3 Evaluate Attitude Stability
According to the calculated attitude data, the evaluation index system is established. The first problem of quantitative evaluation of stability function is the selection of quantitative index. The selected indexes must be able to reflect the balance ability of human body comprehensively and reliably, that is, the quantitative indexes are highly correlated with the balance ability. On the one hand, the selection of evaluation indicators can reflect some information of the evaluation object, which can not be repeated or too little. Therefore, the selection of indicators must abide by the principles of operability, representativeness and sensitivity. The principle of operability is to infer the unobservable and measurable performance by some indicators that can be directly observed or measured; representativeness is to reflect a certain side of the evaluation object as far as possible; sensitivity is the role played in the evaluation. In the evaluation, less indicators are used to achieve comprehensive functions.
Suppose the evaluation index system is , where is the set of index functions composed of evaluation index functions, is the set of evaluation indicators, and is the weight corresponding to the evaluation index. The established stability evaluation index system takes the sports posture as the evaluation target, takes the posture inclination angle, secondary parameters, boundary conditions and sports load as the first level indexes, and the second level indexes include the body weight, height, age, upper limb support and lower limb support under the secondary parameters.
According to the established evaluation system of sports posture stability, the stability level is divided and the sports posture stability is analyzed. Under normal circumstances, human movement is at a normal level at the beginning, with high physical fitness and stable posture. With the increase of exercise time, human physical fitness is gradually consumed, and the movement posture is gradually unstable. If we can’t adjust the physical fitness in time and let it develop, human energy consumption is too large, which seriously threatens the safety of human life. Both upper limb strength and lower limb strength have a certain impact on the stability of human posture. According to the actual state of human movement, the stability level of sports posture should be standardized. The classification table is shown in Table 1.
Table 1 Stability level classification
| Level | Stability Index Range | Stability Level |
| 6 | Extremely unstable | |
| 5 | Strong – extremely unstable | |
| 4 | Strong instability | |
| 3 | Moderate strong instability | |
| 2 | Moderate instability | |
| 1 | Mild to moderate instability | |
| 0 | Stable |
in Table 1 represent the stability index score, which shows the corresponding score. In the specific evaluation process, the scores are given according to the indicators and grades shown in the table. At the same time, based on the above information, the stability is divided into five levels, from “extremely stable” to “extremely unstable”, and the stability of sports posture is accurately evaluated.
2 The Application of Coupled Dynamic Model of Multi-body System in the Evaluation of Sports Posture Stability
2.1 Building Experimental Platform
The experimental platform consists of hardware and software. In the hardware part, binocular stereo vision system is selected, including a triangle bracket, a fixed base and two binocular cameras. The two cameras are connected with the host through gige, interface. The camera collects images, and the host processes data and displays results. The angle of the tripod in three directions can be adjusted. In the experiment, the height can be adjusted to fix the camera to a suitable height for shooting. In the experiment, each part of the body of the experimental object needs to be photographed, so the height needs to be adjusted to a higher position. In addition, the tripod can shrink at will, which is convenient to carry, deploy and move, and can be used for outdoor sports According to the collection of data.
The base material is thick aluminum sheet, which is used as the base of the fixed camera in the experiment. Therefore, two aluminum sheets are used to achieve the effect of no deformation, so that the positions of the two cameras can be kept fixed, and the camera can be used all the time after one calibration. At the same time, the base can adjust different baseline distances. Generally speaking, the smaller the baseline is, the smaller the measurement range is, but it can achieve relatively high measurement accuracy. In the experiment, the distance between the experimental object and the camera is 2–3 meters, so the baseline can not be too small. Using a 30 cm baseline can achieve better measurement accuracy, and the reconstruction error is less than 1%. For other types of motion, the baseline of the camera can also be adjusted to suit the type of motion, so as to achieve better measurement accuracy.
The camera is used for image data acquisition. The Mars industrial camera series is selected. The model is mars 2000–50 gm, and the resolution is 1920 * 1200. The higher resolution can improve the accuracy. The lens focal length is 8 mm, which can adapt to the distance and perspective of the experimental shooting. The video acquisition frame rate of the camera is 50FPS, because the moving video to be shot in the experiment is faster, and the low frame rate will cause motion blur The effect of the experiment is affected by the image.
The software platform is mainly built in visual studio environment. In the development process, openCV, MFC interface library and Qt5 interface library of Python are used. pyQt5 is a python interface based on Qt5, which is composed of Python modules. pyQt5 has more than 620 classes and 6000 functions and methods, which can run on multiple platforms. Qtcore module, QtGui module and QtWidgets module are used in the experiment. QtCore covers the core GUI function of the package. The module is used to process the files, data types, text streams and other objects involved in the program. QtGui module covers a variety of graphics functions, including window set, 2D graphics, basic image interface and font text. QtWidgets module includes A complete set of UI elements, including buttons, text boxes, text labels, etc.
2.2 Experimental Subjects
There were 126 volunteers from a university. They had no nervous system, major bone injury, vestibular or visual system diseases, and had not participated in the dynamic balance training similar to this system. Before the test, all volunteers were familiar with the whole test process and requirements, and voluntarily participated in the test. The experimental objects are divided into three groups as shown in Table 1. Group 1 and group 3 are used to verify the reliability of the system, and group 2 is used to test the feasibility of the dynamic balance test of the system. The specific information of the subjects is shown in Table 2.
Table 2 Information of three groups of subjects
| Age | Weight | Height | |
| Group 1 – Boys (38) | |||
| Group 1 – Girls (17) | |||
| Group 1 – All (55) | |||
| Group 2 – Boys (21) | |||
| Group 2 – Girls (39) | |||
| Group 2 – All (60) | |||
| Group 3 (11) |
The experiment is divided into two parts, one part is the balance keeping experiment, group 1 and group 3 carry out the balance keeping experiment, all the subjects need to wear uniform sportswear and sports shoes, and carry out the balance keeping experiment after more than 10 minutes of warm-up exercise. In the experiment, the experimenters were required to stand on the balance board longitudinally, their feet were located in the two green areas of the balance board, their arms were always natural drooping, their eyes were looking straight ahead, and the test time was 20 s. The subjects were asked to keep the balance board horizontal as far as possible. During the experiment, once the edge of the balance board touches the ground or the subject adjusts the balance by hand, it is regarded as the experimental time scale. One experiment was conducted in group 1, and two repeated experiments were conducted in group 3, with an interval of 5 minutes.
The other part of the experiment is the dynamic following experiment. Group 2 carries out the dynamic following experiment, and the requirements for the experimental object are the same as the balance keeping experiment. The task of the experimental object is to follow the task command to control its own motion. The task command is set by the computer, and the experimental object does not know the motion law before the experiment. Group 2 carries out an experiment. In the experiment, the parameters to evaluate the dynamic following performance of the experimental object are: average angular velocity, average angular acceleration, the number of left and right swings in 20 seconds, the average value of the first platform reached, the number of swings and the standard deviation, the correlation coefficient between the following curve and the standard curve, and the correlation coefficient between the dynamic following curve and the standard curve.
2.3 Experimental Results and Analysis of Balance Keeping
The main purpose of the experiment is to verify the reliability of the evaluation methods of sports posture stability using different technologies. Before the experiment, five identical experiments were carried out under the above experimental conditions and environment to ensure the reliability of the experiment. Before the experiment, all the parameters of group 1 balance keeping experiment were analyzed by descriptive statistics to test their normal distribution characteristics. The test results are shown in Table 3.
Table 3 Descriptive statistics and test results of group 1
| Average | Standard | Inspection | ||
| Value | Range | Deviation | Value | |
| Average angular velocity | 0.45 | 0.150.84 | 0.16 | 1.117 |
| Number of direction changes | 34.93 | 1941 | 4.91 | 0.756 |
| Average angle | 0.98 | 5.23.46 | 1.92 | 0.664 |
| Angle standard deviation | 1.93 | 0.786.22 | 0.94 | 1.522 |
| Angular acceleration | 0.56 | 0.060.54 | 0.15 | 0.744 |
As shown in Table 3, the test significance of average angular velocity, direction change times, average angle and angular acceleration is greater than 0.1, so the null hypothesis can not be rejected, which indicates that these parameters are subject to normal distribution, and only the angle standard deviation deviates from the normal distribution, and the angle standard deviation is one of the main indicators reflecting the balance keeping task. In the balance keeping experiment, the standard deviation of the motion attitude value of the experimental object is evaluated, and the more obvious the standard deviation is, the better the stability evaluation method is. Because only the angle standard deviation does not meet the normal distribution, Spearman nonparametric analysis is used for the correlation analysis, as shown in Table 4. Partial correlation analysis was conducted on three indicators of response task performance: angle standard deviation was significantly correlated with average angular velocity, while the number of direction changes was not significantly correlated with angle standard deviation, while the number of direction changes was not significantly correlated with average angular velocity.
Table 4 Correlation Analysis of selected indicators
| Control Variable | Nothing | Other Variables | Height & Weight & Gender |
| Direction change times & angle standard deviation | 0.270 | 0.330 | 0.533 |
| Angle standard deviation & average angular velocity | 0.606 | 0.639 | 0.724 |
| Direction change times & average angular velocity | 0.403 | 0.120 | 0.456 |
Based on the above analysis results, the stability evaluation methods using different common techniques are used to obtain the experimental data and calculate the standard deviation of each experimental parameter. The experimental results are shown in Table 5.
Table 5 Experimental results of balance keeping data reliability
| Standard | Average | Inspection | ||
| Deviation | Range | Value | ||
| Stability evaluation method using common technology 1 | Average angular velocity | 2.21 | 0.942.35 | 0.918 |
| Change of direction | 3.84 | 1.014.02 | 1.114 | |
| Average angle | 2.69 | 0.842.94 | 1.305 | |
| angular acceleration | 3.04 | 1.133.12 | 0.892 | |
| Stability evaluation method using common technology 2 | Average angular velocity | 1.90 | 0.542.15 | 0.936 |
| Change of direction | 1.47 | 0.662.94 | 1.026 | |
| Average angle | 1.31 | 0.412.64 | 1.047 | |
| angular acceleration | 1.26 | 0.571.94 | 0.923 | |
| Stability evaluation method based on coupled dynamic | Average angular velocity | 0.18 | 0.090.31 | 0.893 |
| model of multibody system | Change of direction | 0.15 | 0.040.12 | 0.926 |
| Average angle | 0.23 | 0.070.43 | 1.058 | |
| angular acceleration | 0.12 | 0.090.15 | 1.345 |
The data in the table can be seen that the test values of each evaluation method are above 0.1, which indicates that the experimental results are effective. In the experimental results of the stability evaluation method with common technology, the range of variation of each parameter is large and the standard deviation is high. In contrast, the standard deviation of the stability evaluation method using the coupled dynamic model of multi-body system is relatively low, the range of variation is narrow, and the overall number value changes are at a low level. It shows that the method is stable in operation and small in error.
2.4 Follow Up Experiment Results and Analysis
The process of follow-up experiment is divided into four stages: A: the balance board starts from touching the ground on the left side and returns to the level linearly in 2 seconds; B: keep the balance board level for 4 seconds; C: change of 3/4 sine curve, lasting for 6 seconds; D: Return to the horizontal line linearly, lasting for 5 seconds. In the evaluation standard of follow-up experiment, the evaluation method follows the correlation degree, time delay and unnecessary swing of the motion trajectory of the balance plate, outputs the dynamic test curve, and judges the advantages and disadvantages of the stability evaluation method according to the time delay of the dynamic curve. Before the experiment, design a unified variable weight for the variables involved in the experiment, and the specific settings are shown in Table 6.
Table 6 Experimental variable weight setting
| Variable | Subjective Weight | Variation Weight | Average Weight |
| Whole course correlation coefficient | 0.50 | 0.13 | 0.315 |
| Change of direction in the whole process | 0.30 | 0.22 | 0.260 |
| Balanced standard deviation | 0.10 | 0.21 | 0.155 |
| Third stage correlation coefficient | 0.06 | 0.10 | 0.080 |
| time delay | 0.04 | 0.34 | 0.190 |
According to the weight coefficient obtained above, the time delay of motion attitude tracking using different common techniques is calculated, and the evaluation methods are compared and analyzed according to the experimental results of time delay. The experimental results are shown in Table 7.
Table 7 Time delay test results of stability evaluation methods using different technologies
| Full Swing | Balance | Follow | ||
| Experimental | Time | Swing | Time | |
| Stage | Delay/ms | Time Delay/ms | Delay/ms | |
| Stability evaluation method | Stage a | 231 | 184 | 117 |
| using common technology 1 | Stage b | 206 | 175 | 204 |
| Stage c | 314 | 162 | 174 | |
| staged | 267 | 143 | 162 | |
| Stability evaluation method | Stage a | 201 | 206 | 182 |
| using common technology 2 | Stage b | 194 | 217 | 184 |
| Stage c | 162 | 232 | 156 | |
| Stage d | 174 | 241 | 143 | |
| Stability evaluation method | Stage a | 55 | 46 | 49 |
| based on coupled dynamic | Stage b | 62 | 51 | 57 |
| model of multibody system | Stage c | 59 | 57 | 53 |
| Stage d | 61 | 39 | 42 |
It can be seen from the time delay experiment results of each index in each stage of the experiment that the time delay of the stability evaluation method using common technology is higher, and the time delay of the stability evaluation method using multi-body system coupling dynamic model is lower in each stage, which is always less than 60ms, indicating that the method has good effect on Sports posture tracking. The main reason is that before the stability evaluation, the coupling dynamic model of human attitude multibody system is constructed, and the relatively complete motion attitude data are obtained by solving the model, which reduces the time wasted in collecting the data.
Combined with the analysis of balance keeping experimental results, the two groups of experimental results prove that the proposed method of sports posture stability evaluation based on multi-body system coupling dynamic model has less error in obtaining the data of sports posture, less time delay in data acquisition, and higher overall reliability.
3 Conclusion
The stability evaluation of exercise posture is one of the most important indexes of physical function evaluation. However, simple and reliable stability assessment techniques and tools are not widely used, and related diseases and falls are still increasing. In this paper, the application of the multi-body system coupled dynamic model in the evaluation of the sports posture stability is proposed. The multi-body system coupled dynamic model is integrated into the stability evaluation. By the design experiment, the time delay of the coupling dynamic model of multi-body system is low, the stability evaluation test value is above 0.1, and the standard deviation is relatively low, the range of variation is narrow, and the overall numerical change level is low. The reliability of the method is always less than 60 ms,. The experimental data have good statistical significance. But there are still many small problems in this design, such as the database establishment of the experimental object and the content in the application are not well combined, the selection of indicators also needs more scientific theory and data support, and further correction and improvement is needed. In the future research, the stability evaluation method of the motion posture will be further improved from a more detailed place for the future sports and sports The research of stability evaluation method provides some foundation and support.
References
[1] Iaboni A, Gulka H, Flint A. The Impact of SSRI Treatment of Major Depression on Gait and Postural Stability in Older Adults: A Pilot Feasibility Study[J]. American Journal of Geriatric Psychiatry, 2020, 28(4):S147–S148.
[2] Dabak S V, Teerawattananon Y, Win T. From Design to Evaluation: Applications of Health Technology Assessment in Myanmar and Lessons for Low or Lower Middle-Income Countries[J]. International Journal of Technology Assessment in Health Care, 2019, 35(6):1–6.
[3] Taoli, Ding, Antony, et al. The applications of nanopores in studies of proteins[J]. Science Bulletin, 2019, 64(19):456–1467.
[4] Wen X D, Liu C W, Huang Z P, et al. A First-Order Differential Data Processing Method for Accuracy Improvement of Complementary Filtering in Micro-UAV Attitude Estimation.[J]. Sensors (Basel, Switzerland), 2019, 19(6).1340.
[5] Yang Z, Zhang Z, Wang D. Design method of measurement errors of MEMS-IMU in attitude capture clothing[J]. Journal of Physics: Conference Series, 2021, 1827(1):12203.
[6] Cvetkovic B N, Gligorijevic M, Petkovic D, et al. Evaluation of information and communication technology sector in the teaching process and strategic collaboration between universities and industry[J]. Computer Applications in Engineering Education, 2019, 27(3):653–662.
[7] Deng W, Pi Z, Lei W, et al. Pencil Code improves learners’ computational thinking and computer learning attitude[J]. Computer applications in engineering education, 2020, 28(1):90–104.
[8] Xiong L, Zhu H, Wu W, et al. A new attitude integration algorithm for coning environment[J]. Advances in Space Research, 2019, 64(11):2379–2389.
[9] Mf A, Sn A, Ak B. On the ability of sliding mode and LQR controllers optimized with PSO in attitude control of a flexible 4-DOF satellite with time-varying payload[J]. Advances in Space Research, 2021, 67(1): 334–349.
[10] Chung Y C, Wu Y R. Dynamic modeling of a gear transmission system containing damping particles using coupled multi-body dynamics and discrete element method[J]. Nonlinear Dynamics, 2019, 98(1):129–149.
[11] Gupta A, Agrawal S, Pal Y. Performance evaluation of hybrid photovoltaic thermal thermoelectric collector using GOA with simulated annealing[J]. Journal of Solar Energy Engineering, 2020, 142(6):1–55.
[12] Chae S, Haberland N, Mccarthy K J, et al. The Influence of Schooling on the Stability and Mutability of Gender Attitudes: Findings From a Longitudinal Study of Adolescent Girls in Zambia[J]. Journal of Adolescent Health, 2020, 66(1S):S25–S33.
[13] Batista P. Robustness to measurement noise of a globally convergent attitude observer with topological relaxations[J]. Nonlinear Dynamics, 2019, 98(1):589–600.
[14] Sun L. Constrained adaptive fault-tolerant attitude tracking control of rigid spacecraft[J]. Advances in Space Research, 2019, 63(7):2229–2238.
[15] Zou A M, Kumar K D, Ruiter A. Finite-time spacecraft attitude control under input magnitude and rate saturation[J]. Nonlinear Dynamics, 2020, 99(10):2201–2217.
[16] Matthew J. G, Matthew T. K, Samuel L. B, et al. Recall Bias in Retrospective Assessment of Preoperative Patient-Reported American Shoulder and Elbow Surgeons Scores in Arthroscopic Rotator Cuff Repair Surgery[J]. The American Journal of Sports Medicine, 2020, 48(6).1471–1475.
[17] Gregory A, Poddar S. Diagnosis and Sideline Management of Sport-Related Concussion[J]. Clinics in Sports Medicine, 2021, 40(1):53–63.
[18] Bh A, Bjt B, Kacs C, et al. Sports Participation and Exercise Restriction in Children with Isolated Bicuspid Aortic Valve[J]. The American Journal of Cardiology, 2020, 125(11):1673–1677.
[19] Moeijes J, Busschbach J, Bosscher R J, et al. Sports participation and health-related quality of life: a longitudinal observational study in children[J]. Quality of Life Research, 2019, 28(9):2453–2469.
[20] Sarah, L, Chen, et al. Outcomes of Hip Arthroscopic Surgery in Adolescents With a Subanalysis on Return to Sport: A Systematic Review:[J]. The American Journal of Sports Medicine, 2019, 48(6):1526–1534.
[21] Tchakounte F, Corneille R, Kamla V C, et al. LimonDroid: a system coupling three signature-based schemes for profiling Android malware[J]. Iran Journal of Computer Science, 2020, 3(2):20.
Biography

Haijin Pan is a excellent teacher of Hainan Vocational University of Science and Technology. He was born in Binxian, Haerbin, Heilongjiang Province. He attended Hainan normal University where he received his bachelor’s degree in physical education in 2010. Meanwhile, as a national swimming intermediate coach and a swimming coach of Hainan disabled people’s Federation special Olympic, his team got the Fifth in National Swimming Championships for the Disabled in 2018 and got 1 gold, 3 silver and 7 bronze MEDALS in People’s Republic of China Tenth Paralympic Games and Seventh Special Olympic Games in 2019.
European Journal of Computational Mechanics, Vol. 30_1, 81–98.
doi: 10.13052/ejcm1779-7179.3013
© 2021 River Publishers