Fundamental MHD Creeping Flow and Electric Potential for a Conducting Fluid Bounded by Two Parallel Plane Walls
A. Sellier
LadHyX. Ecole Polytechnique. 91128 Palaiseau Cédex. France
E-mail: sellier@ladhyx.polytechnique.fr
Received 05 March 2019; Accepted 30 May 2019;
Publication 05 August 2019
Abstract
This work determines the MHD fundamental viscous flow and electric potential induced by a concentrated force, with arbitrary strength s, immersed in a conducting Newtonian liquid bounded by two motionless, parallel and plane no-slip walls. The walls are perfectly conducting or insulating surfaces normal to the imposed uniform ambient magnetic field B. Each fundamental quantity (velocity component, pressure, electric potential) is the analytical one prevailing in the absence of walls plus another ‘confinement’ quantity due to the walls. By performing direct and inverse two-dimensional Fourier transforms, each such confinement quantity is obtained in closed form solely in terms of one-dimensional Bessel-type integrals. The resulting fundamental flow and electric potential are found to depend upon the concentrated force location, the wall-wall gap, the properties of the walls and the problem Hartmann layer thickness where and denote the liquid uniform viscosity and conductivity, respectively. For a force normal to the walls there the electric potential vanishes and the fundamental velocity components and pressure are independent of the nature of the walls and also receive tractable closed forms. These properties remain true for the fundamental pressure and velocity component normal to the walls in case of a force tangent to the walls. In contrast, the electric potential and the velocity component tangent to the walls admit quite involved closed forms and deeply depend upon the nature of the walls when the concentrated force is parallel with the walls.
Keywords: MagnetoHydrodynamics, Viscous flow, Fundamental solution, Parallel plane walls, 2D Fourier transform
1 Introduction
The determination of the coupled flow (velocity u and pressure p), electric potential and magnetic field B about a solid body moving in a conducting Newtonian liquid, with uniform conductivity 0 and viscosity , is a very challenging problem encountered in MagnetoHydrodynamics [2, 15, 24]. In getting (B, u, ) one indeed must simultaneously solve the Maxwell equations and the non-linear Navier-Stokes equations subject to the Lorentz body force with j the current density. These equations, even when supplemented with the well-established linear Ohm’s law j ), are tremendously-involved.
Depending upon the range of the problem dimensionless Reynolds magnetic number Re, Reynolds number Re and Hartmann number Ha, simplifications can fortunately occur. For body length scale , flow velocity typical magnitude V 0, magnetic field scale 0 and a liquid with uniform magnetic permeability 0 and density the previous numbers are defined as Re, Re and Ha where is the so-called Hartmann layer thickness [9]. Note that for applications, ReRe. Neglecting henceforth inertial effects, i.e. assuming that Re , then gives and therefore, if the body has the same uniform magnetic permeability 0 as the liquid, shows that B is uniform in the entire liquid domain (taking the ‘ambient’ uniform value it adopts far from the body). Because B is uniform, the charge conservation property becomes .(u B). This relation and the body force j B in the Stokes equations in general couple the unknown electric potential and flow (u, p).
As shown by [3], considering an axisymmetric insulating body translating parallel with both B and its axis of revolution brings considerable simplifications to the previous viscous (Re ) MHD problem. Then, (u, p) is axisymmetric with no swirling velocity and therefore 0 in the liquid. In absence of electric field far from the insulating body, it follows that 0 in the entire liquid [3, 5, 6]. Thus, the axisymmetric problem reduces to the determination, versus the Hartmann number Ha a/d, of the creeping flow (u, p) driven by the body motion and the Lorentz force . There is a huge literature (see, for instance, the standard textbooks [8, 12]) for the ‘pure’ Stokes case ( i.e. Ha 0) of a body migrating in absence of magnetic field. For Ha 0 (d finite) the problem is more involved and therefore much less has been done. However, for a sphere translating parallel with B one can cite [3] for Ha 1, [4] for Ha 1 and also [22] for the entire range Ha 0.
One should note that [22] resorts to a new boundary formulation to deal for arbitrary Hartmann number with the viscous axisymmetric flow (u, p) about the sphere. This efficient approach appeals to two fundamental axisymmetric viscous flows produced by distributing force points on a circular ring normal to the magnetic field B. These flows are obtained by [21] using the coupled electric potential and viscous flow produced in an unbounded liquid by a concentrated force and analytically determined by [18]. This approach has been recently extended by [20] to the case of a sphere translating normal to a plane solid no-slip wall normal to the ambient uniform magnetic field. A key step in [20] employs the fundamental coupled MHD viscous flow and electric potential produced by a concentrated force located near a plane insulating or perfectly conducting wall. Such a bounded fundamental solution, obtained by [19], is more general than the axisymmetric solutions given in [25, 26]. Of course, the flow obtained in [19] matches, as , the fundamental ‘pure’ Stokes flow bounded by a no-slip motionless plane wall and derived by [1].
Nowdays, especially in Microfluidics, many basic applications also concern strongly confined (liquid in a tube or between two parallel flat walls,...) viscous flows. The relevant fundamental flow produced by a Stokeslet in the ‘pure’ Stokes flow case () are given by [14] for a cylindrical tube and also, in different forms, by [10, 13] for the two-wall geometry. Note that [23] and [16] implemented in a boundary element approach the form given by [13] and [10], respectively. In contrast, the form of the solution obtained by [14] for a circular tube is so involved that it has not yet, to the author’s very best knowledge, received such a boundary element implementation. The present work looks, for a finite Hartmann layer thickness, at the fundamental MHD solution (u, p, ) produced by a concentrated force located in a conducting Newtonian liquid bounded by two parallel plane walls. The point force location and strength are arbitrary. Moreover, each wall is solid, no-slip, motionless, normal to the ambient uniform magnetic field B and either insulating or perfectly conducting.
The paper is organized as follows. The addressed MHD fundamental problem together with two basic properties and a fruitful decomposition are given in . The axisymmetric case of a force normal to the walls is solved in . Three solutions for a force parallel with the walls and different natures of the walls (insulating or perfectly conducting surfaces) are established in . Finally, a few concluding remarks close the paper in .
2 Addressed MHD Problems and Basic Properties
This section gives the MHD problem governing the coupled fundamental creeping flow and electric potential produced by a point force located in a conducting liquid bounded by the two parallel flat walls. It also gives two basic properties and introduces the auxiliary regular MHD flow and electric potential which are obtained in and .
2.1 Governing Fundamental MHD Problem
As illustrated in Figure 1, we consider a concentrated force, with arbitrary strength s, placed at the point in a conducting liquid domain occupying the 0 domain .
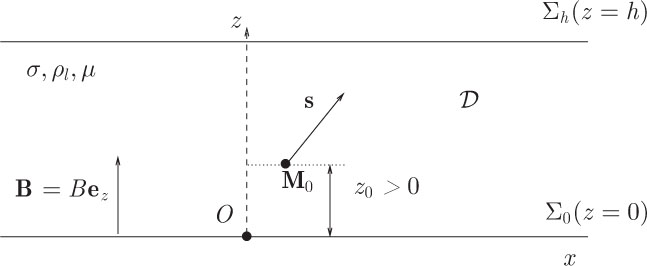
Figure 1: A concentrated force, with strength s, located at a point in the 0 z h liquid domain bounded by two motionless, plane and parallel no-slip walls and . The prescribed ambient magnetic field B is uniform and normal to the walls.
The flat surfaces and are motionless and no-slip. Cartesian coordinates (O, x, y, z), with associated unit vectors () and origin O on , are employed. Then, each point in the liquid is located by the vector x OM. Accordingly, . Inertial effects are neglected and therefore (see the introduction) the magnetic field B in the liquid is uniform. Here, B is normal to the walls with prescribed magnitude 0. The liquid uniform viscosity and conductivity 0 are given and therefore so is the Hartmann layer thickness d [9] defined as d . The concentrated force produces, at each point in the liquid, coupled electric potential and viscous flow with velocity u and pressure p. Owing to Ohm’s law, the current density j in the liquid is ). The steady flow (u, p) obeys the creeping flow equations with the Lorentz body force j B. Finally, the liquid is quiescent and free from electric field far from the point source . Requiring the charge conservation property , the fundamental quantities (u, p, ) then obey the MHD problem
with and the usual three-dimensional Laplacian operator and Dirac delta pseudo-function, respectively. The problem (1–3) must be supplemented with boundary conditions on the walls complying with the far-field behaviours (3)1. On the no-slip walls u 0 and, therefore, j . Moreover, on a (perfectly) conducting or insulating surface, with unit normal n, it is required [15] that or j.n 0, respectively. On the plane walls and the boundary conditions complying with (3) thus are
| (4) |
Clearly, the problem (1–4) is linear in s. Thus, its solution (u, p, ) writes
| (5) |
with second-rank velocity tensor G, pressure vector P and potential ‘vector’ V to be determined. These tensor and vectors solely depend upon the vector , the coordinates and the given wall-wall gap h and Hartmann layer thickness d.
2.2 Basic Properties
This subsection shows that there is no electric potential when the force is normal to the walls and also gives, whatever the force orientation, a key symmetry property for the velocity tensor G.
2.2.1 Axisymmetric Case
For s parallel with (case of a force normal to the walls) the flow (u, p) is axisymmetric about the () axis and without swirl velocity component. Thus, the second Equation (2) becomes 0. Using the far-field behaviour (3) and the boundary conditions (4) on the walls then shows that 0 in the liquid. Accordingly, the vector V in (5) satisfies 0.
2.2.2 Symmetry Property
Consider the solution (u, p, ) to (1–4) for a concentrated force, of strength s, placed at point . Denoting by and the stress tensors for the flows (u, p) and (u, p), the Equations (1–2) rewrite
Since the stress tensors are symmetric and the flows are divergence-free,
| (8) |
Moreover, using Ohm’s law for the currents j and j and the identities
in which the last scalar products on the right-hand sides are expressed, from (6–7), in terms of and also yields
| (11) |
Taking the first Equations (6–7) and using (8) and (11) finally gives
| (12) |
Integrating (12) over the liquid domain (exploiting the far-field behaviours (3)) for the considered fundamental solutions and recalling the definition (5) of the velocity tensor G then shows that
| (13) |
| (14) |
where n denotes the unit normal on the walls directed into the liquid. The boundary conditions (4) have not been employed in establishing (13). These conditions dictate the value of the flux , defined by (14), and thereby the properties of the velocity tensor G. Using the usual tensor summation convention for repeated indices l and t in {}, this tensor reads . Inspecting (4) readily shows that 0 on both walls and . Thus, (13) yields the following key symmetry property
| (15) |
The property (15), of importance for the present work, deserves a few comments:
- (i) this symmetry property has already been noticed for the case of a single plane wall in [19] but after the determination of G. It can be easily proved for this single wall case by mimicking the above treatment.
- (ii) even in the absence of magnetic field, i.e. for the usual ‘pure’ Stokes case (), the property (15) is not necessarily true. For instance, while it holds for a Stokeslet close to a no-slip plane wall (see [1] and also [17]) it is not valid any more for a Stokeslet close to a porous slab (see [11]).
- (iii) owing to (15), it is sufficient to determine in this work the components
(16)
2.3 Free-space Solution and Regular Auxiliary MHD Problem
A solution to (1–3) in absence of walls (unbounded liquid), termed the free-space solution and denoted by (), has been analytically obtained by [18]. It is expressed in terms of a function () solution to the problem
| (17) |
with the Hartmann layer thickness. Here, it is no use giving which is available in [19, 21]. As shown by [18], the flow () reads
| (18) |
For further purpose, some useful Cartesian components of the free-space (recall (5)) velocity tensor , pressure vector and ‘potential’ vector are given in Appendix A.
By superposition, the solution (u, p, ) to (1–3) and (4) is sought as
| (19) |
Clearly, the auxiliary viscous flow (U, Q) and electric potential , regular in the entire liquid domain , obey the MHD problem
The solution (U, , ), due to the walls, is linear in the force stength s. More precisely, setting and gives
| (23) |
Recall that G fulfills the symmetry property (15). As noticed in Appendix A, the free-space tensor also obeys (15). Hence, satisfies
| (24) |
3 Point Force Oriented Normal to the Walls
This section considers the case s of a force normal to the walls.
3.1 Advocated Form of the Auxiliary MHD Viscous Flow
The point force, with strength s , is located at with and 0 . As noted in 2.2.1 and in Appendix A, 0 while (u, p) and () are axisymmetric about the () axis and without swirl. Accordingly, 0 and (U, Q) is axisymmetric about the () axis and without swirl. Following [24], U and Q are then sought as
with an unknown function. As the reader may check, (U, Q) is found to obey the Equations (20–21) with 0 as soon as F satisfies
| (27) |
Moreover, from (25–26), the far-field behaviours (2) require that
Injecting in (18) shows that () is obtained from the function H by relations similar to (25–26). Thus, the no-slip boundary conditions (4) read
| (29) |
In summary, the task reduces to the determination of F solution to (27–29).
3.2 Associated Problem in Two-dimensional Fourier Space and Its Solution
Inspecting (27–29) shows that with and . This suggests using the two-dimensional Fourier transform, , of a function given by
| (30) |
with the vector in the two-dimensional Fourier space and i the usual complex square root of 1. Omitting its dependence upon , the Fourier transform of F is denoted by . Setting q —q— and taking the Fourier transform of (27) yields for the linear differential equation
| (31) |
Seeking solutions of (31) of the form A(q)e easily provides four different real values for . These values are and such that
Accordingly, the general form of the solution to (31) is
| (34) |
The unknown functions () are determined by enforcing the two dimensional Fourier transform of each velocity boundary conditions (29).2 Denoting by (q, z) the Fourier transform of the free-space function , then gives the linear system
The right-hand sides of (35–38) are analytically obtained from the Appendix A (use (106) and also the property ). It is immediately found that Ĥ(q,0)=
The problem (35–40) is analytically solved using Maple algebra software. After many manipulations and exploiting the identity both functions and have been cast into the following condensed closed forms
with dimensionless functions D and analytically given in Appendix B. The pressure Fourier transform , obtained by taking the Fourier transform of the second relation (26), is given by (45). Exploiting (33–34) yields
| (43) |
Injecting the solution () into (43) the Maple software then gives
| (44) |
with dimensionless functions still analytically displayed in Appendix B.
3.3 Obtained Auxiliary Flow and Pressure
The Fourier transform of (25–26) immediately provides the relations
| (45) |
Since each function and , derived in , depends upon the vector q soley through its magnitude q the inverse Fourier transform of (45) is obtained from Appendix C. Setting and recalling (23) yields
in which and denote the usual Bessel functions. In summary, the auxiliary flow (U, Q) has been analytically expressed in terms of three one-dimensional Bessel-type integrals for the case .
4 Point Force Oriented Parallel to the Walls
This section considers the case of a force parallel with the walls. The case will follow immediately and is therefore let to the reader.
4.1 Auxiliary Pressure and Velocity Component Normal to the Walls
From (20–21) and the scalar product of (20) with the auxiliary velocity component and the pressure Q obey (recall the definition (27) of )
| (49) |
Taking (18) with gives for the free-space velocity Cartesian components
| (50) |
Thus, on the walls the condition U v and the property read
| (51) |
It appears from (49) and (51) that both and Q are independent of the walls properties (insulating or perfectly conducting walls). Invoking (49) and the two first properties (33), the (two-dimensional) Fourier transforms and write
with unknown functions () dictated by the Fourier transform of the conditions (51). Such conditions yield the linear system
which is analytically solved by Maple algebra software using (40) and also, from the result (106) in Appendix A, the identity
| (58) |
After many manipulations the following condensed results are obtained
| (59) |
with new functions given in Appendix D while is obtained from the function , encountered in (42) and defined in Appendix B, by switching z and . In other words, . Exploiting this property and taking the inverse Fourier transform of (59) immediately recovers the symmetry property theoretically predicted in 2.2.2. Using the second identity (115) also easily yields
4.2 Auxiliary Electric Potential and Velocity Tangent to the Walls
The determination of the velocity components (), tangent to the walls, and of the electric potential is a bit tricky. As shown in [19], for the free- space electric potential is . Recalling (50), the boundary conditions (22) require that on each plane wall and
Moreover, (20–21) show that, recalling (27), The Fourier transform of these Equations (see also (34)) and the previous boundary conditions on the walls (in which and depends upon only through —q—) then suggest to write
Taking the Fourier transform of the identity ) (second Equation (21)) and using the two first properties (33) easily provides
These relations reveal that, in contrast to the functions and , the functions do not solely depend upon q. Taking the Fourier transform of the Equation yields relations involving the functions (see (52)) determined in the previous section for the axisymmetric case . These relations are
Combining (65–66) with (67–68) and using the links gives
On both walls (z 0, h) the divergence-free condition and the no-slip requirements and have been already combined to obtain the second condition (51). Therefore, the required functions () are obtained by enforcing on the walls four conditions: the ones (61) for and the additional ones for z 0, h.3 These latter conditions read
| (71) |
| (72) |
with the right-hand sides given by (39). The two linear Equations (71–72) for () have to be supplemented with two relations obtained by expressing (61), using (64) and (69, 70). These relations depend upon each wall nature (insulating or conducting surface). Inspecting (62, 64) and (67–70) suggests the decompositions and with the following Fourier transforms
The functions and are gained from the solution () derived in 4.1 for and by recalling (53) and (59) for . It is found that
with each previously-encountered function and new function given in Appendix D. Accordingly, the required quantities and are
The velocity and the electric potential do not depend upon the walls properties. In contrast, the solution is, as the quantities (), sensitive to each wall nature. It is obtained from the relations
which, from Appendix C, readily yield the following solutions
As shown below, it is possible to analytically obtain the required functions and (see (81)) for the considered insulating or conducting flat walls and . Combining (77–78) with (82–83) finally provides the desired quantities (recall (23))
| (84) |
4.2.1 Solution for Two Conducting Walls
For two conducting walls the first condition (61) is enforced for . Using (64) and (69–70) thus yields the Equations
It has been possible to cast and into the following condensed forms
| (88) |
with functions given, versus (), in Appendix D. Still using Maple software algebra in solving the linear system made of (71–72) and (85–86) provides in closed form both () and also, from (81), and . The Fourier transforms and , expressed in terms of () and (), are also given in Appendix D.
4.2.2 Solution for Two Insulating Walls
This time (71–72) are supplemented with two equations obtained from the second condition (61) on each wall. These equations are
This time, admits for j 1, 2 the condensed form
with functions still given, versus (), in Appendix D. Solving (71–72) and (89–90) provides () for the case of two insulating walls. The resulting quantities and are displayed in Appendix D.
4.2.3 Solution for One Conducting Wall and a Second Insulating Wall
For symmetry reasons, the attention is restricted to a perfectly conducting wall and an insulating wall. Accordingly, () is obtained by solving (71–72), (85) and (90). The resulting needed Fourier transforms and are again available in Appendix D.
5 Conclusions
The fundamental MHD viscous flow and electric potential produced by a concentrated force located in a conducting liquid bounded by two parallel solid plane no-slip walls has been analytically obtained whatever the point force location and orientation. It has been achieved, assuming a prescribed uniform ambient magnetic field normal to either perfectly conducting or insulating walls, by using a two-dimensional Fourier transform. The obtained results, expressed in terms of one-dimensional Bessel-type integrals, agree with a key symmetry property established for the fundamental velocity field without solving the problem. For a force normal to the walls there is no electric potential and the axisymmetric pressure and velocity receive a tractable form which is independent of the nature (insulating or perfectly conducting) of the walls. The same property holds for the pressure and velocity component normal to the walls when the concentrated force is parallel to the walls. In addition, when the force is tangent to the walls the results for each velocity component tangent to the walls and for the electric potential are pretty involved and strongly depend upon the properties of the walls.
The derived analytical fundamental fields will be used in future to investigate the migration of a solid sphere immersed in the conducting liquid and translating normal to the walls. As shown in [22] for the unbounded liquid case and recently in [20] for a liquid bounded by one solid plane wall, this issue can be tackled by numerically inverting a suitable boundary-integral equation on the sphere surface only. The key step in such an efficient procedure is the determination of the axisymmetric MHD viscous flows produced by distributing on a circular ring, located in a plane immersed in the liquid and parallel with the walls, some point forces. These flows comply with the boundary requirements on the walls (no-slip and additional relevant condition for the current), and can be built using the results established in the present work. However, such a task requires many additional efforts and is therefore postponed to future investigations.
A. Free-space Solution
The free-space solution (), analytically determined by [18], is given in [19, 21] versus and the Hartmann layer thickness d. The free-space velocity tensor , pressure vector and ‘potential’ vector are then deduced. The tensor is found to obey the symmetry property (15). Moreover,
- taking (case ) gives and
- taking (case ) gives
with the following definitions
The free-space function H, solution to (17), reads with . Thus, . Setting , the two-dimensional Fourier transform of (17) yields the equation
| (103) |
which is solved by introducing the one-dimensional Fourier transform , on the variable , of . Using (103) and the definitions (32) of and gives
Injecting (105) into the second equality (104) provides in terms of a one-dimensional integral analytically given in [7] (page 409). Dropping the dependence in and using the defintion (32) of , the result for (q, z) is
| (106) |
B. Auxiliary Material for the Axisymmetric case
The functions D and arising in the result (41) for are defined as
and by the additional identities and . The functions appearing in (42) for are
and . Finally, the functions for the formula (44) are
while
C. Two-dimensional Inverse Fourier Transform
Recalling (30), the inverse Fourier transform f of a function is defined by
| (114) |
Consider for the functions defined as and for k and l in {1, 2}. Introducing the usual functions and then gives the useful relations
Since and it also follows that
D. Auxiliary Material for the Asymmetric Case
The dimensionless functions and in (59) are defined as and
The coefficients occurring in (76) for the quantity are
In expressing in closed form the required Fourier transforms and it is convenient to adopte the following notations and property
| (125) |
- Material for two conducting walls:
The functions , introduced in (88), depend upon (). Dropping the dependence upon (), one gets
Elementary algebra then provides for 1, 2. The results read
with new functions and given by
- Material for two insulating walls:
The functions , introduced in (93), solely depend upon (). Dropping again the dependence upon (h, ), it is found that
After many elementary manipulations, it is then found that (for 1, 2)
with the following definitions
- Material for a conducting wall and an insulating wall:
For 1, 2 it has been found, in such circumstances, that
with the following definitions
References
[1] Blake, J. R. A note on the image system for a Stokeslet in a no-slip boundary. Proc. Camb. Phil. Soc. 70 (1971), 303–310.
[2] Branover, G. G., and Tsinober, A. B. Magnetohydrodynamic of incompressible media. Moscow: Nauka, 1970.
[3] Chester, W. The effect of a magnetic field on Stokes flow in a conducting fluid. J. Fluid Mech. 3 (1957), 304–308.
[4] Chester, W. The effect of a magnetic field on the flow of a conducting fluid past a body of revolution. J. Fluid Mech. 10 (1961), 459–465.
[5] Gotoh, K. Magnetohydrodynamic flow past a sphere. Journal of the Physical Society of Japan 15, 1 (1960), 189–196.
[6] Gotoh, K. Stokes flow of an electrically conducting fluid in a uniform magnetic field. Journal of the Physical Society of Japan 15, 4 (1960), 696–705.
[7] Gradshteyn, I. S., and Ryzhik, Y. I. M. Tables of Integrals, Series, And Products. Academic Press, Inc., San Diego, 1965.
[8] Happel, J., and Brenner, H. Low Reynolds number hydrodynamics. Martinus Nijhoff Publishers, The Hague, 1983.
[9] Hartmann, J. Theory of the laminar flow of an electrically conductive liquid in a homogeneous magnetic field. Det Kgl . Danske Videnskabernes Selskab. Mathematisk-fysiske Meddelelser XV (6) (1937), 1–28.
[10] Jones, R. B. Spherical particle in poiseuille flow between planar walls. The Journal of Chemical Physics 121 (2004), 483–500.
[11] Khabthani, S., Sellier, A., Elasmi, L., and Feuillebois, F. Motion of a solid particle in a shear flow along a porous slab. J. Fluid Mech. 713 (2012), 271–306.
[12] Kim, S., and Karrila, S. J. Microhydrodynamics. Principles and selected applications. Martinus Nijhoff Publishers, The Hague, 1983.
[13] Liron, N., and Mochon, S. Stokes flow for a stokeslet between two parallel flat plates. J. Eng. Math. 10 (2004), 287–303.
[14] Liron, N., and Shakar, R. Stokes flow due to a stokeslet in a pipe. J. Fluid Mech. 86 (1978), 727–744.
[15] Moreau, R. MagnetoHydrodynamics. Fluid Mechanics and its Applications Kluwer Academic Publisher, 1990.
[16] Pasol, L., and Sellier, A. Gravitational motion of two-particle cluster between two parallel plane solid walls. Comptes-Rendus Mcanique 334, 2 (2006), 105–110.
[17] Pozrikidis, C. Boundary integral and singularity methods for linearized viscous flow. Cambridge University Press, 1992.
[18] Priede, J. Fundamental solutions of MHD Stokes flow. arXiv: 1309.3886v1. Physics. fluid. Dynamics (2013).
[19] Sellier, A. Fundamental mhd creeping flow bounded by a motionless plane solid. European Journal of Computational Mechanics 26, 4 (2017), 411–429.
[20] Sellier, A., and Aydin, S. H. Axisymmetric MHD viscous flows bounded by a solid plane normal to a uniform ambient magnetic field: fundamental flows and application to a solid sphere translating normal to the wall. European Journal of Computational Mechanics 27, 5–6 (2018), 443–468.
[21] Sellier, A., and Aydin, S. H. Fundamental free-space solutions of a steady axisymmetric mhd viscous flow. European Journal of Computational Mechanics 25, 1–2 (2016), 194–217.
[22] Sellier, A., and Aydin, S. H. Creeping axisymmetric MHD flow about a sphere translating parallel with a uniform ambient magnetic field. Magnetohydrodynamics 53 (2017), 5–11.
[23] Staben, M. E., Zinchenko, A. Z., and Davis, R. H. Motion of a particle between two parallel plane walls in low-reynolds-number poiseuille flow. Physics of Fluids 15 (2003), 1711–11.
[24] Tsinober, A. B. MHD flow around bodies. Fluid Mechanics and its Applications. Kluwer Academic Publisher, 1970.
[25] Tsinober, A. B. Axisymmetric magnetohydrodynamic Stokes flow in a half-space. Magnetohydrodynamics 4 (1973), 450–461.
[26] Tsinober, A. B. Green’s function for axisymmetric MHD Stokes flow in a half-space. Magnetohydrodynamics 4 (1973), 559–562.
Biographies

A. Sellier is Professor of Fluid Mechanics at Ecole Polytechnique, Paris, France. He belongs to LadHyX, the fluid laboratory hosted by this Institution and develops there research works devoted to creeping flows, suspensions and MHD.
European Journal of Computational Mechanics, Vol. 28 1&2, 130.
doi: 10.13052/ejcm1958-5829.28121
© 2019 River Publishers