Investigating the Design Parameters’ Influence in a Fast Switching Valve – An Approach to Simplify the Design Process
Henrik C. Pedersen1,*, Niels Christian Bender2 and Torben O. Andersen1
1Department of Energy, Aalborg University, Denmark
2R&D A/S, Hinnerup, Denmark
E-mail: hcp@energy.aau.dk; ncb@rdas.dk; toa@energy.aau.dk
*Corresponding Author
Received 16 November 2021; Accepted 19 October 2022; Publication 29 April 2023
Abstract
Designing Fast Switching Valves (FSVs) for digital displacement units is a complicated process pushing the technology to the limit. The system dynamics and the interaction of the fluid, mechanical structure, actuator and control hence calls for advanced modelling, including CFD and FEA, to capture, e.g. fluid stiction effects, end-damping and impact contact stresses. Unfortunately, this essentially renders optimization processes infeasible due to the computational burden involved, although this is precisely what is required for this type of complex multi-domain problem.
Therefore, the focus of the current article is on how a complex mechatronic design problem, like designing an FSV, may be aided by considering decomposing and simplification through sensitivity analysis and analyzing correlations between the design and output parameters. This is done to significantly reduce the original design problem without compromising the investigated design space. The paper focuses specifically on the results related to an FSV and the flow delivering part of this, showing the influence of the various design parameters. However, the approach and considerations may be generalized to an other areas as well.
Keywords: Fast switching valve, sensitivity analysis, design simplification.
1 Introduction
Digital hydraulics and digital digital displacement® technology is expected to change the fluid power industry, as it enables full range operation with part-load efficiencies much higher than conventional fluid power machinery, [1]. The heart of this technology are the Fast Switching Valves (FSVs), controlling the flows to and from the pistons within the units. Typical operating conditions include operating pressures up to 350 bar and speeds up to several thousand rpm. Therefore, the requirements for the valves include opening- and closing times in the very low milli-second range, flow rates of several hundred litres/min with minimal pressure drop across the valve, and billions of operating cycles. Hence, developing and designing these types of valves pushes the technology to the limit and involves advanced (dynamic) Computational Fluid Dynamics (CFD) and Finite Element (FE) analysis, as theoretical models are limited without relying on e.g. CFD to determine parameters, thus limiting designing using numerical optimization procedures. Therefore, the focus of the current article is looking at one way of decomposing and simplifying the design problem for an FSV. This is done by analyzing correlations between the design parameters and phenomena that needs consideration when designing the valve, identifying the insignificant design parameters and significantly reducing the design problem.
Fast Switching Valves
FSVs have been considered and analyzed in several research contexts, see, e.g. [2, 3, 4, 5, 6, 7, 8, 9], and also considered by commercial valve manufacturers as discussed in [7]. Therefore, some general requirements are starting to emerge. However, the research has been fragmented, focusing on different valve topologies and more addressing analysis of designs and observed phenomena than considering design approaches. [2, 10, 6] have focused on the design of various actuator types. In these cases, a set of Lumped Parameter Models (LPM) have been applied for the flow geometry, where transient (magnetic) FEA is coupled with standard ODEs to describe the valve dynamics. Similar approaches are to some extent applicable to the flow delivery part, comprising the plunger and seat. However, for the flow delivery part the available LPMs are highly dependent on parameters, that require (transient) CFD-analysis, as these cannot be determined analytically.
An analysis of using LPMs is presented in [28], by the current authors. However, the validity of the model is restricted to limited parameter variations, and the model/approach still rely on utilizing CFD baseline parameters and then correcting parameters using relatively simple analytical approximations. However, this is design/parameter-dependent, and in some cases, this only contributes limited to the models accuracy. Therefore methods for further simplification are desirable. This article proposes to use advanced models in the early stage of the analysis and design phase to pinpoint dominating parameters and test the validity of simpler models. This is hence a fundamentally different approach from what is usually used. This reduces the design space without omitting superior designs, and the simpler models may subsequently be used in the optimization to locate candidate designs.
Mechatronic Design Approaches
In a general context, mechatronic system design is a complicated process. General frameworks do exist like the VDI 2206, [11]. When considering a dynamic system, the major issue with these frameworks is the process to formulate an accurate model that is rapidly executed and that may be used actively without limiting the design space.
Often for dynamic systems, the design process is separated into several areas. This is known as “co-design”, [12], and is divided into sequential, iterative, simultaneous and bi-level. Roughly speaking, sequential and iterative design approaches consider the plant a separate optimization problem, where the control-related parameters are optimized after an optimal plant is found. Contrary, the simultaneous approach considers all design parameters at once, why the design space may become huge. Finally, bi-level or multi-level approaches optimize the system as a whole, but where parts of the optimization are placed in inner loops like, e.g. controller design, [13]. Therefore, the relevant approach for a given system depends on the specific design problem, allowed optimization time, and system complexity. Additionally, the required model detail levels should be identified.
Other approaches include modelling frameworks like, e.g. [14, 15], applying a standard model library of mechanical components, sensors, actuators etc., to create the mathematical representation. In this case, the problem lies in realizing the design of these components in a given system. The most automated optimization approaches are related to topology optimization, [16], e.g. to optimize stiffness and thermal conductivity in [17] or reducing mass of an automotive engine cradle [18], thus, significantly reducing the engineering intuition. The method has been applied to multi-objective and multi-physics problems, but has yet to find adaptation in complex dynamic systems, [19].
Finally, a sequential design procedure based on design sensitivity was presented in [20] where a solenoid actuated automotive valve was designed, incorporating a soft-landing control strategy. The optimal design was identified using a simplified magnetic circuit model, and fine-tuned using FEA. The optimization benefits from having a simplified model which sufficiently accurate describes the actuator. However, for the valve considered here, where the valve’s dynamic performance is highly dependent on the fluid-plunger interaction, simplified models are inadequate in the initial phases, as the models will rely on parameters that requires CFD-analysis. The same applies to the structural properties which require FEA to determine the stresses. Measures, therefore, have to be taken to limit the computational burden if optimization is to be used.
The current work’s focus is on simplifying the design problem for an FSV through sensitivity analysis utilizing advanced models to determine the correlations between design parameters and valve behaviour. The currently best design is used as baseline (BL) through which models may be validated using advanced numerical tools. Based on this evaluation and identification of the influential design parameters, LPMs are formulated, which ideally do not require additional CFD and/or FE analysis. Hereby the problem may be reduced by removing design parameters with little to insignificant influence on valve performance, and the developed LPMs may be used for the optimization. Finally, the performance of a candidate design may then be compared with a complete computational analysis before prototypes are developed. Still, however, the method is limited by only given insight into the problem at hand within a limited design space around the baseline design, why several iterations may also be required.
The article is structured as follows. Section 2 describes the system considered and related design problems. Section 3 addresses considerations for simplifying the design process, and Section 4 describes how this is done through analysis of parameter correlations. Section 5 considers the parametrization of the design problem and Section 6 how the CFD- and FE-analyses are made. Finally, Section 7 presents the results followed by the conclusion.
2 Considered System and Design Problems
The FSV considered is to be used in a Digital Displacement motor (DDM), as shown in Figure 1. The motor is a radial piston design, where each piston chambers is connected to a high-pressure FSV (denoted HPV) and a low-pressure FSV (LPV). Each chamber has a peak flow rate of 125 l/min at a rated speed of 800 RPM.
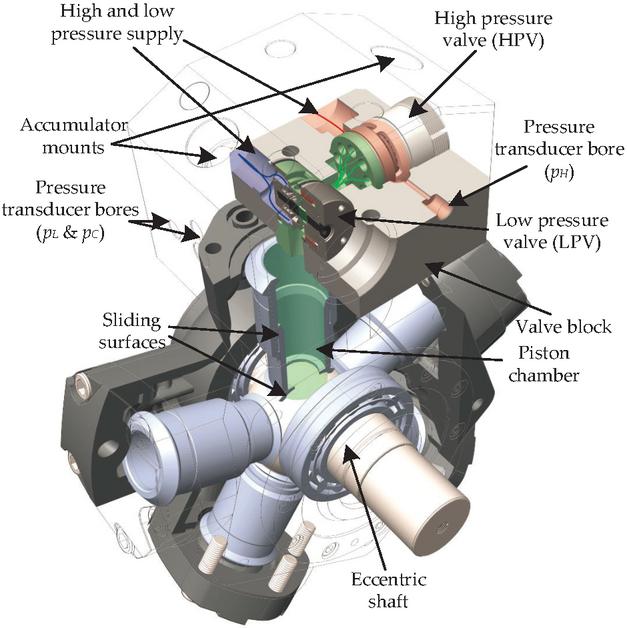
Figure 1 The DDM prototype with FSV. Picture from [21].
The two FSVs control the flow to and from the piston chamber. Flow enters through the HPV during motoring and leaves through the LPV. The two valves are identical and have check valve functionality, i.e. they open passively when cf. Figure 2. By proper timing of the valve openings, it is not a requirement to open against a high pressure, which significantly lowers the actuator requirements. However, the valve actuator needs to be able to counterbalance the peak flow force. The considered valve is shown in Figure 2. The actuator part comprises a stationary copper coil, a moving Permanent Magnet (PM) and a magnetic conducting housing material. The PM is mounted to the plunger. The active valve closing happens when the coil is energized. When closed, the plunger and seat are leak tight squeezed together. When de-energized, the PM on the plunger latches to the top of the valve housing. However, in the current article, it is the flow design part, indicated by the green box in Figure 2, which is of interest. It should be noted that the actuator force does influence the switching time. The force is hence based on the current actuator design to evaluate valve performance.
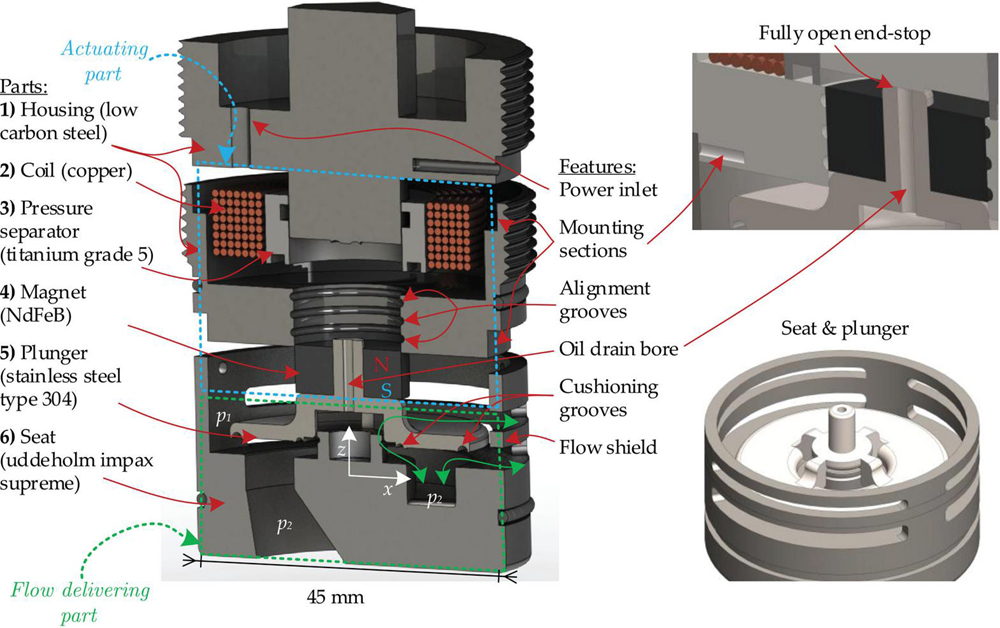
Figure 2 Cut-through of the valve design considered. The design is a second iteration of the one present in [5], where the flow design is revised and also includes a cushioning damping.
2.1 Fluid-Mechanical Design Constraints and Objectives
Besides typical design objectives like minimal pressure (throttling) loss and power consumption, the design is restricted by several constraints and physical limitations like e.g., components not interfering and the following requirements (described in text for ease of understanding):
: The valve is capable of bi-directional flow, i.e. no flow forces cause the valve to close.
: Switching time from open to close is within limits (depend on rated rotation speed, here 800 RPM).
: The valve can open passively (in case there is a sufficient negative pressure differential).
: The flow force is below the magnetic latching force.
: The maximum stress in the mechanical parts are below design limits.
: The impact velocity is below the specified threshold.
: The tolerances are within manufacturing limits.
: The system efficiency is above threshold.
are required to make the valve applicable in a DDU, and are to avoid low durability designs, and is for practical and economic reasons. is imposed as an additional constraint used before detailed evaluations and is based on the simple energy considerations described below.
2.1.1 First Measures for Evaluating System Efficiency
The following approximation is used to evaluate the system efficiency (effects like fluid compression and decompression are omitted). Under the assumption of instantaneous valve switching, each piston will over one rotation ideally contribute with the following energy [7]:
| (1) |
where is the machine displacement ( is the piston area and is the eccentric radius), is the dead volume, is the effective bulk modulus, and the difference of high and low pressure manifold.
The largest hydraulic power loss occurs during idling when the LPV is opened during the entire rotation, for which the total throttling loss for one piston yields:
| (2) |
where and are the turbulent and laminar related flow coefficients, related directly to the valve design, as described in Equation (5). The above may be used to approximate the system efficiency dependent on operating conditions, and shows that the losses relatively are more influenced by the rotation speed and machine displacement than the ideal output energy is.
3 Considerations for Simplifying the FSV Design Process
To simplify the design process, other properties relate to the valves physical behaviour need consideratiopn, like e.g., the flow force playing a vital role in the valve dynamics, cf. below. Hence, the plunger movement gives rise to a resisting force as discussed in [22] where both stiction and Movement-Induced (MI) parametric relations are described. Thus increasing the contact area between plunger and seat means significantly increasing the stiction force, but also ensures a leak-free design and lowers the mechanical stresses. However, these fluid effects cannot be accurately described by analytical models, without relying on CFD-determined coefficients. Hence, this is the background for identifying what is termed the “output parameters”, i.e. measures used to represent the essential properties and behaviour of the valve.
3.1 Lumped Parameter Model Background
Generally the system is described by complex models using e.g., Navier-Stoke’s equations, Maxwell’s equations, etc., which are used in the detailed simulation of the system. However, to understand how different parameters are related to the design parameters, simplified models are presented in the following, based on previous studies of the valve [25, 22]. These models are used to identify the output parameters considered when investigating various designs parameters sensitivity, cf. “Identification of output parameters” in Figure 3. However, it should be stressed that in the current work, the output parameters are all evaluated directly from the CFD and FEA analyses. Hence, the following expressions are only included to indicate the initially expected correlations between design- and output parameters.
The first factor considered includes the flow force, which is influential for dimensioning the actuator. The fluid velocity will locally cause pressures to decrease, thus potentially affecting the flow force. The following parametric form has been proposed, [22]:
| (3) |
with
| (4) |
where is the angle used to describe the influence of the vena contracta, dependent on plunger displacement, , and seat width, . & are constants fitted by CFD data, and is the effective area for the pressure difference.
The pressure-flow relationship is described by the orifice equation, modified to account for laminar flow conditions, [23], and a transient term as derived in [24] and validated by transient CFD simulation in [25]:
| (5) |
where is the orifice’s narrowest flow area, is the fluid density, and the discharge coefficient. is the critical Reynold’s number, the fluid dynamic viscosity, and the hydraulic diameter. The coefficient is the valve’s flow inductance, describing the acceleration and deceleration of fluid going through the orifice. Therefore, maximizing will result in a pressure drop reduction required to deliver a certain flow.
The actuator requirements depend on the mass, , and the forces acting on the plunger. The objective is to deliver the required mechanical work to switch the valve with the lowest power consumption and response time. Simplified, the require power may be approximated, by only considering the resisting fluid forces and moving mass, as [26]:
| (6) |
where is the switching frequency, the stroke length, and & are fluid resistance coefficients. The flow force will aid in closing the valve, why omitted for worst-case energy considerations. The mass, , is the combined mass of the moving parts, evaluated from the geometrical design parameters. The mass from movement induced flow is excluded, as this requires advanced transient CFD models to evaluate.
3.2 Determining Output Parameters
When identifying output parameters the mechanical stress in the seat and plunger needs to be considered, as fatigue problems may arise. As this involves stress concentrations near the edges and cushions, accurate values calls for FE-analysis. The structural parameters of interest are thus the static- and dynamic contact loads, where Hertzian stresses and the maximum von Mises stress are not allowed to exceed the fatigue limits.
The above described effects are evaluated through the parameters given in Table 1, referred to as the output parameters.
Table 1 Output parameters
| Fluid Dynamical Properties | ||
| Steady-state flow force acting on the plunger | [N] | |
| Pressure differential/throttling loss | [bar] | |
| Plunger velocity at end-stop | [m/s] | |
| Movement-induced fluid volume from plunger | [m] | |
| Work required to move the plunger | [J] | |
| Mechanical Properties | ||
| Maximum von Mises stress | [MPa] | |
| Maximum shear stress | [MPa] | |
| Maximum von Mises stress over time (impact) | [MPa] | |
| Maximum shear stress over time (impact) | [MPa] | |
| Mass of the moving parts (and total mass) | [kg] | |
4 Sensitivity Analysis to Simplify the Design Process
For this kind of system, it is clear that design investigation calls for advanced models early in the design phase, where lumped parameter models may be insufficient. The advanced models may subsequently be used to determine coefficients and the necessary detail-level for LPMs, which may then be used in an optimization context. Therefore to gain as much knowledge as possible and take full advantage of the detailed simulations, the idea is to determine the sensitivity w.r.t. the various design parameters. This is done by investigating parameter correlations between input and output parameters, as described below. However, still the limitations of the approach should also considered, which include that the approach is only valid for a given area around the investigated design.
In the normal V-model for designing mechatronic products, [11], the level of detail increases in the process down to prototype level. The approach here is to turns part of the design process upside down and include a sensitivity analysis to simplify part of the design problem, as illustrated in Figure 3.
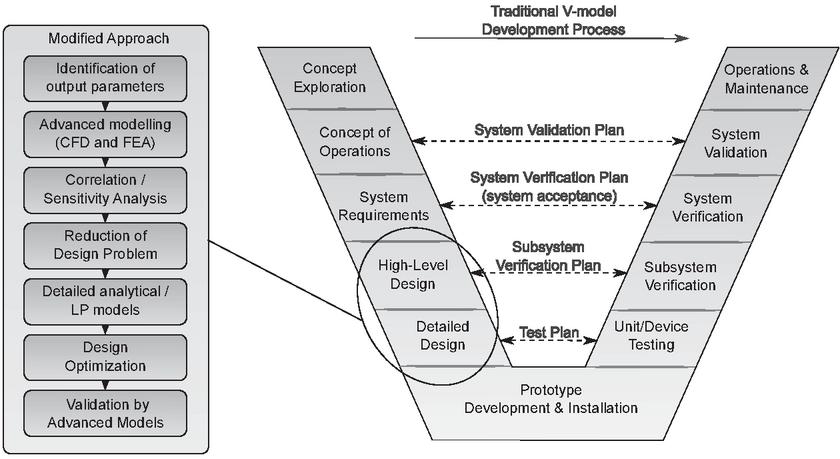
Figure 3 Illustration of the approach suggested (steps to the left).
The approach taken to visualize the correlation between input and static output parameters is here using Spearman’s rank correlation coefficient [27]. This requires a monotonic increasing or decreasing relationship between input and output to give useful results. However, it is applicable for both linear and non-linear tendencies. The method may be used to discover the strength of a link between two parameters or data sets. The interpretation of this statistical method is a measure of the probability of observing a change in output given a change in input ? The results always yield a symmetric matrix with ones along the diagonal. The Spearman’s rank correlation is a probability: , where a negative value means an increase in causes a decrease in with probability , and a positive value means an increase in causes an increase in with probability . This probability gives a confidence in how strong the correlation is. Generally the interpretation is:
• : indicates a very high correlation.
• : indicates a high correlation.
• : indicates a moderate correlation.
• : indicates a low correlation.
• : indicates a negligible correlation.
The intervals indicate to what degree an output parameter can be altered from varying a single input, thus yielding a good indication of which parameters are influenced by the different input parameters. Input parameters yielding negligible (or low) correlation coefficients for all output parameters may be removed from the design process.
The computational burden dictates that the sample size is significantly smaller for the dynamic related output parameter, i.e. when the plunger moves. In this case, the approach is based on inspiration from [20]. Due to the smaller sample size, it is beneficial to quantify the relative sensitivity , where and describe the change in normalized input and output parameter, respectively. Hence, by normalizing the parameters, the different design parameter’s influence may be directly compared.
In the following, the process is described with basis in the FSV considered.
5 Design Basis & Parametrization
To describe the valve this is parameterized as shown in Figure 4.
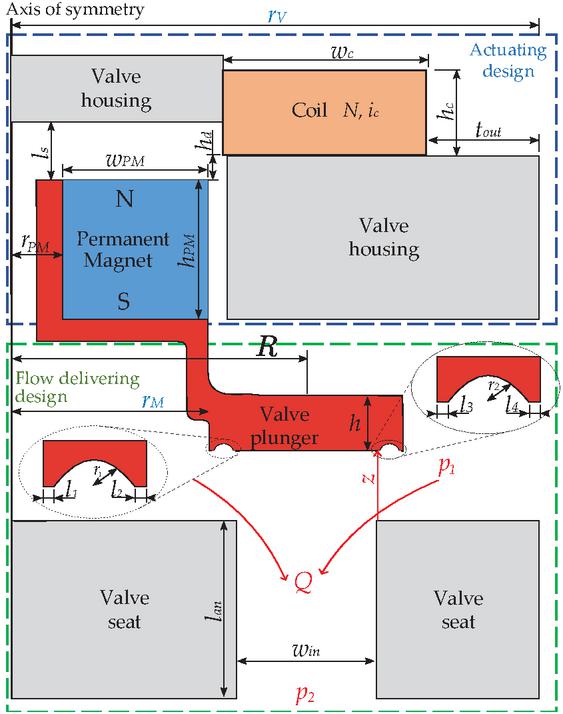
Figure 4 Parametrization of the FSV. Axisymmetric view.
In Figure 4 The independent parameters are indicated by black, whereas the dependent variables (blue) are calculated as: and respectively.
The independent design parameters serve as inputs for the sensitivity analysis. The other input parameters are related to the influential fluid dynamic and mechanical properties. The input parameters are determined from physical factors known to influence the output parameters and a systematic series of simulations. For this, several manufactured sub-optimal valve prototypes have been used to validate the quantities predicted by the models, described and validated in [8, 25, 6, 9].
The inputs are summarized in Table 2. The pressure difference across the valve, , and the impact speed, , directly affect the calculated stresses. Therefore, these are input parameters for the mechanical analysis, despite also being output parameters of the fluid dynamic analysis. However, for the mechanical analysis, the pressure difference is when the valve is closed, whereas it relates to the throttle losses in the fluid dynamic analysis. The remaining input parameters are structural. The considered parameter variations are determined based on the previous studies of the valve, i.e. what is physically obtainable (in size and what is realistic to manufacture), the required flow capacity of the valve, to maintain the effect of the dampening groove, and the possible stroke length. As the analysis is bounded by the used ranges, variations outside the described area may significantly affect the correlation. Hence, the conclusions are only valid within the given parameter ranges.
Table 2 Input parameters. Geometrical parameters, cf. Figure 4
| Geometry parameters | Fluid Dynamical Analysis | ||||
| [mm] | [kgms] | ||||
| [mm] | [l/min] | ||||
| [mm] | |||||
| [mm] | Mechanical Analysis | ||||
| [mm] | [bar] | ||||
| [mm] | [m/s] | ||||
| [mm] | |||||
| [mm] | |||||
| [mm] | |||||
| [mm] | |||||
6 Mesh Independence
As described, the analysis is based on advanced CFD- and FE-models to determine the sensitivity to the various design parameters. Therefore, spatial discretization and meshing is required. It is essential to ensure that the mesh refinement is proper to yield consistent results – especially for the transient CFD simulations where the fluid domain is changed from iteration to iteration. This is verified by increasing the number of elements, especially in the zones of steep gradients for the fluid dynamics. It is less critical for the CFD part if too fine meshing is used (apart from increased simulation time). In contrast, the FE-analysis of the mechanical parts requires closer consideration, as contact and point loads and/or sharp corners may yield results, which is partly due to real stress concentration, but may also partly result from using a too fine mesh resolution. I.e. where mesh refinement near a singularity may cause the computed stress to increase beyond what is physically possible. However, it follows from Saint-Venant’s principle that this does not affect the stress sufficiently far from the singularity.
For the considered valve, the stresses arising is due to compression between the two parts, why the main problem is Hertzian stress concentration in the valve seat beneath the tips of the grooves on the valve plunger. In this case there will be a deformation in both valve seat and plunger, and the actual stress concentration is therefore distributed and not a single point load. Hence, using a too fine mesh refinement will not yield more accurate results, but may lead to numerical problems, as singularities may arise during the solution. Therefore, determining the appropriate number of elements is a necessity, as shown in Figure 5. The outputs are here normalized with the mean value of all function evaluations to better visualize the variations.
Figure 5 CFD and FEM results as function of the mesh refinements on geometry edges.
The graph shows the fluid dynamical domain being properly discritized from around 80e3 elements, where no significant variations occur, and this number scales approximately linearly with the fluid domain size. This is ensured by fixing the maximum allowed face size of each element. Furthermore, inflation layers have been used in the regions near the wall boundaries. In comparison, the mechanical analysis shows signs of approaching singular points. Figure 5 shows decreasing stresses until a certain mesh refinement is reached around 15e3 elements; hereafter, the stresses start rising approximately linearly, due to the singularity problems arising from the points of contact. Further mesh refinement is therefore undesirable. Therefore, the mesh length scale used for the reference geometry is fixed to preserve the generality for the future calculations, i.e. changing the geometry changes the number of elements accordingly.
7 Results
Based on the above, the results are presented and analyzed in the following. The CFD related output parameters are evaluated as follows:
1. Plunger velocity is evaluated at m (gives a conservative measure and the allowed step-size is small below this threshold)
2. The total displaced fluid volume of the plunger:
3. The amount of mechanical work required:
7.1 Fluid-mechanical Properties
Considering the flow-related properties, the results are shown in Figures 6–7. The sensitivity related to and is determined from stationary CFD results. The other results are obtained from transient CFD simulations.
The design described above, [25], is baseline for the investigation. Only one parameter is changed at a time, and the value is set to represent the boundaries of the design space, due to the computational burden involved (average evaluation time 1.5 hours incl re-meshing and CFD computations, Intel Core i7-5600U CPU 2.6 GHz). In general, additional simulations may be included to yield better insight, but here, this is considered sufficient. The transient simulation results are shown in Figure 6, with the red line being the baseline design. Each test is performed with and , with being Low Pressure (LP). The plunger moves from fully open () towards during the simulation. The actuating force and the spring force are identical for all simulations; hence the variations are entirely a result of the changes in the moving mass and fluid force due to the parameter variation.
Figure 6 Simulation results of dynamic CFD analysis (350 bar pressure – HPV) with Movement-Induced flow area and plunger velocity as function of the plunger position. LP illustrate the case for simular simulations, but with the pressure being 5 bar (LP-valve) instead. BL is the baseline design.
It is seen that the pressure, and hence density and viscosity, has negligible influence on the shadow area. However, the fluid viscosity is vital for the end (squeeze-film) damping, as the impact speeds for the LP-curves are higher than for the corresponding HP-valve. Therefore the LPV dictates the strictest design requirements. Furthermore, the graphs demonstrate that increasing the cushioning radiuses ( & ) provides a significant amount of end-damping.
The static output design parameter’s sensitivity are shown in Figure 7, and the CFD analysis of dynamic switching in Figure 8.
Figure 7 Correlation indices of the static fluid dynamical output parameters.
Figure 8 Sensitivity indices of the dynamic and transient fluid dynamical output parameters.
Figure 7 reveals a very high correlation between the stroke length, , and the flow force, , but only a low correlation to the pressure loss, . The negative values indicate that increasing results in decrease of both and . The width of the seat, , has close to low correlation for both parameters. Furthermore, it is notable that increasing decreases while increasing due to the larger area. The radius () has a low correlation on . The flow has moderate correlation with but is not as influential on which must be attributed the importance of . Furthermore it is clear that neither the viscosity or cushion groove radii are correlated to any of the outputs in the considered ranges. It should be noted that and have also been tested, which resulted in for all outputs. From the above, it is clear that is dominated by , and is primarily correlated to and , where is typically one of the valve design requirements.
The dynamic output parameters are shown in Figure 8. The figures show that changing or results in an approximately similar relative change in (the value is close to one). However, the results also reveal that decreasing actually leads to a relatively higher impact velocity . I.e. the relative change in damping force is less than the change in force required to decelerate the plunger due to the plunger mass reduction.
Furthermore it may be seen that changing & simultaneously will only moderately affect and . However, the cushion groove radii significant influences the impact speed , as expected. Furthermore, variation of changes the required work and displaced volume as expected, where decreasing also decreases , as the plunger does not have time to fully accelerate. Finally, affects the switching time, which couples strongly to the operation of the DDM.
Therefore, shortly summarising the impact speed may be reduced by increasing the cushion grooves without this significantly affecting the other output parameter, whereas the stroke length is the most influential parameter for all the other output criteria. Therefore, these are the focus parameters and effects to monitor closest if optimizing the valve for a given objective.
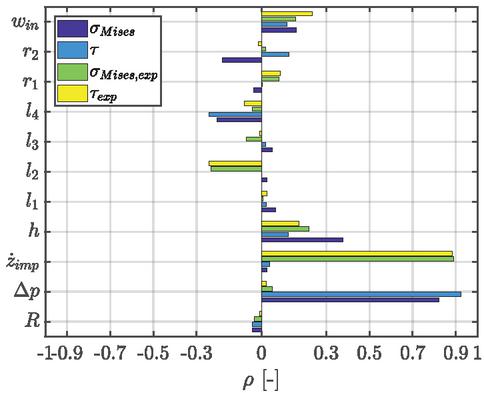
Figure 9 Sensitivity indices of the output parameters.
7.2 Mechanical Properties
Considering the mechanical output parameters, the sensitivity results are shown in Figure 9. The evaluation is made when the plunger collides with the seat, and the plungers kinetic energy is converted into displacement and stress waves within the materials. The stresses ( and ) are calculated by FEA as a function of the impact speed, considering also the geometry and plunger mass. In addition the static pressures are applied to the surfaces, which means that the contacting surfaces are squeezed together after impact, yielding the static stress. The maximum von Mises and shear stress are described by and , although of minor importance relative to the stress cycles. For the steel used in the valve and and an endurance limit of 350 MPa is considered. The latter is included in Figure 10, which shows the actual function evaluations of the mechanical impact, whereas simulations have shown that neither nor significantly influence the outputs. It should be noted that an FEA of contact-mechanics does include an uncertainty caused by the influence of unknown surface topographies. However, the primary stresses are compressive and thus act to harden the material in the impact regions.
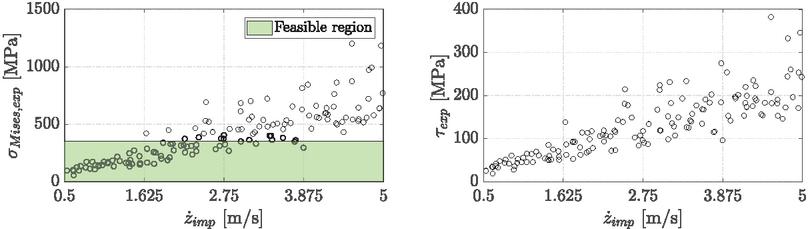
Figure 10 Outputs from mechanical impact of plunger and seat. The feasible region corresponds to 350 MPa endurance limit which occurs for all designs below 1.5 m/s.
The results yield, not surprisingly, a clear correlation between the maximum stress and the pressure difference across the valve (). Similarly, the impact stresses relate directly to . Contrary, none of the other design parameters significantly impact the stresses, except for the height , which has a low correlation to the maximum von Mises stress. Therefore, although not visualized, results yield that the peak stress in the plunger stays below 400 MPa for all designs, which is below the endurance limit of both titanium and steel. When design the valve to be used in a DDM running up to 350 bar, the chosen parameter intervals are therefore not critical from an endurance point of view. The sensitivity indices and relation between and stresses therefore underlines the significance of designs that include a high fluid dynamical damping near end-stop to reduce the impact speed. From the evaluation, the shear stresses are in an allowable range; however, the von Mises stress end up at critical levels as increases. Based on the results of Figure 10 it will therefore be reasonable to choose any design in the proposed design space with a below 1.5 m/s. This does, of course, depend upon the applied materials and coatings used, but this at least limits the von Mises stress to be below 350 MPa.
8 Conclusion
The focus of the current article has been two-fold. Specifically, an FSV was analyzed concerning how different design parameters affected physical quantities determining the performance and behavior of the valve. This analysis was based on both static and transient CFD analyses and FE-analysis, yielding that for the current design, the dominant design parameters included the stroke length, cushion groove radii and the flow driving pressure differential the valve is designed for. Similarly, it was found that the fatigue stresses are related to the impact velocity, which again is linked to the cushion groove radii, but that the problem may be discarded if the impact velocity is kept below approximately 1.5 m/s.
The article’s second objective was to inspire the use of sensitivity and correlation analysis approaches as part of an aid to simplify complex design processes. The approach was utilized for the FSV to identify design parameters with negligible influence on a system’s behavior and performance, and was based on using advanced models in visualizing and quantifying the parameters with insignificant correlation to the output parameters, which could then be used for ignoring uncorrelated parameters in simpler LPM models. The presented approach is thus a mean that may aid in decomposing and simplifying mechatronic design problems. The intention is thus to reduce the computational effort while maintaining a sufficient modelling accuracy for complex problems, thereby significantly reducing the original design problem without compromising the investigated design space too much, but still considering the limitations that the approach is just an aid and the validity of the approach is limited by the region for where the sensitivity analysis is valid.
Acknowledgement
This work was supported by the Danish Council for Strategic Research via the HyDrive-project (case no. 1305-00038B). The authors are grateful for the funding.
References
[1] Ehsan, M., Rampen, W. H. S., and Salter, S. H., 1997. “Modeling of Digital-Displacement Pump-Motors and Their Application as Hydraulic Drives for Nonuniform Loads”. ASME J. Dyn. Sys., Meas., Control,122(1), pp. 210–215.
[2] Roemer, D. B., Johansen, P., Bech, M. M., and Pedersen, H. C., 2015. “Optimum design of a moving coil actuator for fast switching valves in digital hydraulic pumps and motors”. IEEE/ASME Trans. Mechatronics,20(6), pp. 2761–2770.
[3] Winkler, B., Plöckinger, A., and Scheidl, R., 2010. “A novel piloted fast switching multi poppet valve”. Int. J. Fluid Power,11(3), pp. 7–14.
[4] Uusitalo, J. P., Ahola, V., Soederlund, L., Linjama, M., and Kettunen, L., 2010. “Novel Bistable Hammer Valve For Digital Hydraulics”. Int. J. Fluid Power,11(3), pp. 35–44.
[5] Noergaard, C., Madsen, E. L., Joergensen, J. M. T., Christensen, J. H., and Bech, M. M., 2018. “Test of a Novel Moving Magnet Actuated Seat Valve for Digital Displacement Machines”. IEEE/ASME Trans. Mechatronics,23(5), pp. 2229–2239.
[6] Noergaard, C., Bech, M. M., Christensen, J. H., and Andersen, T. O., 2018. “Modeling and Validation of Moving Coil Actuated Valve for Digital Displacement Machines”. IEEE Trans. Ind. Electron.,65(11), pp. 8749–8757.
[7] Noergaard, C., 2017. “Design, Optimization and Testing of Valves for Digital Displacement Machines”. Ph.d. dissertation, Aalborg University.
[8] Bender, N. C., Pedersen, H. C., and Nørgård, C., 2017. “Experimental Validation of Flow Force Models for Fast Switching Valves”. In Proc. ASME/BATH 2017 Symp. Fluid Power Motion Control, ASME.
[9] Bender, N. C., Plöckinger, A., Foschum, P., Winkler, B., and Pedersen, H. C., 2019. “Measurements of a Novel Digital Hydraulic Valve Comprising a Cushioning Feature”. J. Dyn. Syst. Meas. Control,under revi.
[10] Madsen, E. L., Joergensen, J. M. T., Noergaard, C., and Bech, M. M., 2017. “Design Optimization of Moving Magnet Actuated Valves for Digital Displacement Machines”. In ASME/BATH 2017 Symp. Fluid Power Motion Control, pp. 1–12.
[11] Verein Deutscher Ingenieure (VDI), 2004. VDI 2206: Design methodology for mechatronic systems. VDI.
[12] Kamadan, A., Kiziltas, G., and Patoglu, V., 2017. “Co-design strategies for optimal variable stiffness actuation”. IEEE/ASME Trans. Mechatronics,22(6), pp. 2768–2779.
[13] Pedersen, H. C., Andersen, T. O., Hansen, M. R., and Bech, M. M., 2010. “Presenting a Multi-Level Superstructure Optimization Approach for Mechatronic System Design”. In Proc. ASME 2010 10th Bienn. Conf. Eng. Syst. Des. Anal., pp. 891–898.
[14] da Silva, M. M., Brüls, O., Desmet, W., and Van Brussel, H., 2009. “Integrated structure and control design for mechatronic systems with configuration-dependent dynamics”. Mechatronics,19(6), pp. 1016–1025.
[15] Malmquist, D., Frede, D., and Wikander, J., 2014. “Holistic design methodology for mechatronic systems”. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng.,228(10), pp. 741–757.
[16] Bendsoe, Martin Philip, Sigmund, O., 2004. Topology Optimization Theory, Methods, and Applications, 2 ed. Springer-Verlag Berlin Heidelberg.
[17] Chen, Y., Zhou, S., and Li, Q., 2010. “Multiobjective topology optimization for finite periodic structures”. Comput. Struct.,88(11-12), pp. 806–811.
[18] Li, C., Kim, I. Y., and Jeswiet, J., 2015. “Conceptual and detailed design of an automotive engine cradle by using topology, shape, and size optimization”. Struct. Multidiscip. Optim.,51(2), pp. 547–564.
[19] Deaton, J. D., and Grandhi, R. V., 2014. “A survey of structural and multidisciplinary continuum topology optimization: Post 2000”. Struct. Multidiscip. Optim.,49(1), pp. 1–38.
[20] Yang, Y. P., Liu, J. J., Ye, D. H., Chen, Y. R., and Lu, P. H., 2013. “Multiobjective optimal design and soft landing control of an electromagnetic valve actuator for a camless engine”. IEEE/ASME Trans. Mechatronics,18(3), pp. 963–972.
[21] Noergaard, C., Christensen, J. H., Bech, M. M., Hansen, A. H., and Andersen, T. O., 2017. “Test Rig for Valves of Digital Displacement Machines”. In Ninth Work. Digit. Fluid Power, pp. 1–13.
[22] Bender, N. C., Andersen, T. O., and Pedersen, H. C., 2019. “Feasibility of Deep Neural Network Surrogate Models in Fluid Dynamics”. Model. Identif. Control A Nor. Res. Bull.,40(2), pp. 71–87.
[23] Borutzky, W., Barnard, B., and Thoma, J., 2002. “An orifice flow model for laminar and turbulent conditions”. Simul. Model. Pract. Theory,10(3-4), pp. 141–152.
[24] Funk, J. E., Wood, D. J., and Chao, S. P., 1972. “The Transient Response of Orifices and Very Short Lines”. J. Basic Eng.,94(2), pp. 483–489.
[25] Bender, N. C., Pedersen, H. C., Winkler, B., and Plöckinger, A., 2018. “Numerical Investigation of Switching Features of a Hydraulic Seat Valve with Annular Flow Geometry”. Int. J. Fluid Power,19(3), pp. 152–164.
[26] Bender, N. C., Pedersen, H. C., Plöckinger, A., and Winkler, B., 2018. “Evaluating the Influence of Leaking Active Check Valves in Digital Displacement Units”. In IEEE Glob. Fluid Power Soc. PhD Symp., IEEE, pp. 1–9.
[27] Best, D. J., and Roberts, D. E., 1975. “The Upper Tail Probabilities of Spearman’s Rho”. R. Stat. Soc. Ser. C (Applied Stat.,24(3), pp. 377–379.
[28] Pedersen, H. C., Andersen, T. O., and Bender, N. C., 2021. “Investigating the Influence of Design Parameters on the Fluid-Structure Interaction in Fast Switching Valves”. Proc. ASME/BATH 2021 Symposium on Fluid Power & Motion Control FPMC 2021, ASME, 2021.
Biographies

Henrik C. Pedersen, since 2016 Professor (with special responsibilities) at the Department of Energy at Aalborg University, with a specialty in Fluid Power and Mechatronic Systems. Research areas include modeling, analysis, design, optimization and control of mechatronic systems and fluid power systems in particular. Author of 160 publications within these areas. Head of the section for Mechatronic Systems and program leader for several research projects within this area.

Niels Christian Bender, received his Ph.D. in 2020 at the Department of Energy at Aalborg University, with a specialty in Fluid Power and Mechatronic Systems focusing on Fast Switching Valves. Since 2019 and until now he has been employed at R&D Test Systems. Mainly doing control and hydraulic-related R&D work within the industry of large-scale test benches – primarily for the wind industry.

Torben O. Andersen, 2005-present Professor in Fluid Power Systems and Mechatronic Systems at Department of Energy at Aalborg University, DK. Research areas include: Control theory. Energy usage and optimization of fluid power components and systems with focus on hydrostatic transmissions and linear actuation. Mechatronic system design in general, Control of robotic systems, Modelling and simulation of dynamical systems. Digital valve technology.
International Journal of Fluid Power, Vol. 24_2, 247–270.
doi: 10.13052/ijfp1439-9776.2424
© 2023 River Publishers