Energy Management Based on Neural Networks for a Hydraulic Hybrid Wheel Loader
Henrique Raduenz1,*, Liselott Ericson1, Karl Uebel2, Kim Heybroek2, Petter Krus1 and Victor J. De Negri3
1Division of Fluid and Mechatronic Systems, Linköping University, Linköping, Sweden
2Volvo Construction Equipment, Eskilstuna, Sweden
3Laboratory of Hydraulic and Pneumatic Systems, Federal University of Santa Catarina, Florianópolis, Brazil
E-mail: henrique.raduenz@gmail.com; liselott.ericson@liu.se; karl.uebel@volvo.com; kim.heybroek@volvo.com; petter.krus@liu.se; victor.de.negri@ufsc.br
*Corresponding Author
Received 09 June 2022; Accepted 21 July 2022; Publication 22 September 2022
Abstract
This paper presents a method to derive optimised energy management strategies for a hydraulic hybrid wheel loader. Energy efficiency is a key aspect for the sustainability of off-road mobile machines. Energy management strategies for on-road hybrid vehicles cannot be directly applied to off-road hybrid machines. One significant reason is that there are added degrees of freedom with respect to how power can be recovered, exchanged and reused in the different functions, such as drivetrain or work functions. This results in more complex energy management strategies being derived. This paper presents an analysis and preliminary conclusions for a proposed method to derive optimised online energy management strategies for a hydraulic hybrid wheel loader. Dynamic programming is used to obtain optimal offline energy management strategies for a series of drive cycles. The results are used as examples to train a neural network. The trained neural network then implements the energy management strategy and is used to make optimised control decisions. Through simulation, the neural network’s ability to learn the dynamic programming decision-making process is shown, resulting in the machine operating with fuel consumption similar to that of the offline optimal energy management strategy. Aspects of simplicity to model these machines for dynamic programming optimisation, the data necessary to train the network, the training process, variables used to learn the dynamic programming decision-making process and the robustness of the network when facing unseen operational conditions are discussed. The paper demonstrates the simplicity of the method for taking into account variables that affect the control decisions, therefore achieving optimised solutions.
Keywords: Construction machines, hydraulic hybrid, energy management strategies.
1 Introduction
This paper presents the preliminary results from a research project aiming to study suitable methods to obtain Energy Management Strategies (EMS) for complex hybrid constructions machines. This research is motivated by the fact that construction machines have added degrees of freedom compared to on-road vehicles when it comes to hybridisation. In on-road vehicles, power is mainly exchanged between the wheels, engine and/or energy storage system. In construction machines, power can be exchanged between the wheels, engine, work functions and/or energy storage system. Therefore, they are more complex, and the degrees of freedom impose a greater challenge for the derivation of Energy Management Strategies (EMSs). This highlights the importance of research on methods to obtain Energy Management Strategies for construction machines.
The EMS is a controller that defines where, how, how much and when power from different sources is split or added to provide the power requested for different functions. There are already several methods used to generate EMSs for on-road hybrid vehicles ([1–3]), e.g., Dynamic Programming, Equivalent Consumption Minimisation Strategy, Rule-based EMSs, Fuzzy-logic Controllers, Model Based EMSs and others.
The EMSs obtained through each method differ in their capacity for online implementation, optimality, coverage of operational conditions and ease of realisation for complex systems. Therefore, not all of them are promising for construction machines. However, it is expected that the methods could be adapted and/or combined to generate suitable EMSs for construction machines. This approach seems to be true, as argued in [3–9].
As an initial study, this paper presents a method to derive optimised online energy management strategies for a parallel hydraulic hybrid wheel loader. Online terminology is used to define that the controller does not have prior knowledge of the complete drive cycle. In Section 2, some of the methods encountered in the literature are presented and their applicability to construction machines is discussed. Section 3 describes the method that is the subject of this paper. Section 4 presents the case study used to evaluate and discuss the proposed method. Results and discussions are presented in Sections 5 and 6, followed by the conclusions.
2 Methods to Derive Energy Management Strategies
A few methods to obtain EMSs are described in the sequence, with a focus on construction machines. Several authors ([1, 4, 7, 10, 11]) divide these methods into two main categories according to the resultant EMS, depending on whether they are optimisation-based or rule-based EMSs. On the other hand, [2] and [3] choose to classify the methods in terms of whether they result in online or offline EMSs. This classification is adopted in this paper, and various methods are presented in Figure 1. In this paper, not all the existing methods are discussed.
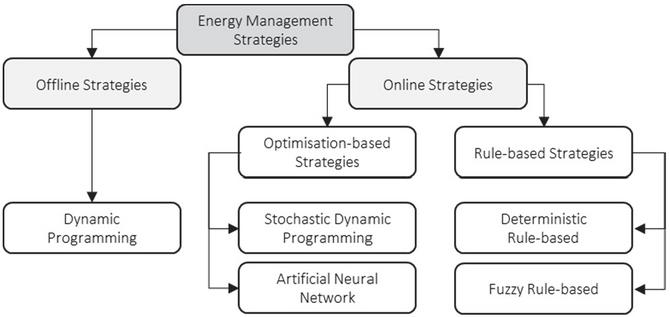
Figure 1 Classification of methods to obtain Energy Management Strategies, adapted from [2] and [3].
Some of the optimisation-based strategies are capable of finding the global optimal solution but require full a priori knowledge of the drive cycle; therefore, they cannot be implemented online and are also limited to a specific drive cycle. However, they usually serve as a benchmark to analyse, tune, evaluate and/or propose other optimised online EMSs ([1, 2, 6, 11–14]). One of such methods is Deterministic Dynamic Programming (DP).
A description of DP can be extracted from [15] and [16]. DP is a mathematical technique used for the optimisation of multi-stage decision-making processes. Such decisions cannot be viewed in isolation because the cost of the present decision must consider the cost of future decisions. DP at each stage ranks decisions based on the sum of the present cost and the expected future cost. It requires a discrete dynamic model of the system and a cost function that is additive over time. This dynamic model expresses the evolution of state variables, under the influence of decisions made at discrete time instants. It is capable of finding the optimal decision-making policy for the stages; this policy minimises the total cost function over the stages.
DP is applied to the development of hybrid vehicles to find a global optimal EMS for a given drive cycle that results in minimum fuel/energy consumption. The resultant EMS could be, e.g., the law defining how power is split between the engine and the hybrid system to meet the power requirement at the wheels along the drive cycle. DP has a high computational cost and requires a priori knowledge of the power demand; therefore, it is not implementable online.
A few examples of the application of DP to obtain EMSs for construction machines are found in the literature. Reference [13] develops an EMS for a wheel-loader with hybrid power-split transmission. The authors adopted DP and made comparisons using a Rule-based (RB) approach.
Reference [12] addressed the problem of combined design and EMS optimisation for a parallel hybrid wheel loader. DP and RB strategies were formulated to evaluate the combined optimisation approaches in terms of optimality and computational load.
According to Figure 1, online strategies are further divided into optimisation-based and rule-based strategies. Examples of methods that result in optimisation-based online EMSs are: Equivalent Consumption Minimisation Strategy (ECMS), Stochastic Dynamic Programming (SDP) and Artificial Neural Networks (NN).
One way of achieving a close-to-optimal online EMS is by using results from offline optimisations as inputs for supervised learning algorithms. According to [11], algorithms such as Artificial Neural Networks could be used to learn an EMS.
Reference [17] states that Artificial Neural Networks (NN) provide a practical method for learning from examples. The author describes their structure as a densely interconnected set of simple mathematical units (neurons). With a network composed by several layers of parallel units, it is possible to approximate complex functions, in this case the EMS.
Reference [18] proposed and investigated an EMS based on DP and NN for a hydraulic series hybrid on-road vehicle. An NN was then trained to reproduce the DP’s optimal accumulator pressure trajectory based on the vehicle’s velocity. It demonstrates that, if the optimal accumulator pressure trajectory is known, then an NN-based control scheme can achieve near globally optimal fuel efficiency. Similar approaches have been used by other authors for similar cases ([11, 19–22]).
The most widely used EMSs in hybrid construction machines are the Rule-based (RB) ones due to their high reliability and easy realisation [5]. They are heuristic strategies implemented as “IF-THEN” rules. Human expertise, intuition, operational boundaries, mathematical models and safety considerations determine the rules ([1] and [11]).
Rule-based (RB) strategies are characterised by lower computational requirements, simplicity and easier applicability online, at the cost of suboptimality [1]. Another unfavourable characteristic is the required development effort when using them for complex machines that require many variables to be monitored and control decisions to be made.
According to [2], there is a possibility that the control rules can be made detailed and complex enough to take care of any event that may affect the vehicle’s operation. This may be true for less complex vehicles but could be a difficult task for complex construction machines.
The literature review showed that Rule-based EMSs have already been developed for wheel loaders. Reference [23] implemented an RB-EMS for a parallel hybrid wheel loader. Reference [13] used DP as a benchmark to build an RB-EMS for a power-split hybrid wheel loader. Similarly, [12] used DP to derive an RB-EMS strategy for a hybrid wheel loader.
For a parallel hydraulic hybrid wheel loader, reference [24] developed an RB-EMSs and an Equivalent Fuel Consumption Minimisation (ECMS) EMS. The author compared the fuel consumption for each strategy for different drive cycles. Results highlighted the simplicity of RB-EMSs compared to ECMS and also their smaller cycle-dependency if compared to ECMS.
Taking into consideration the methods discussed above and the classification presented in Figure 1, it is possible to make a comparison between the different resultant EMSs. Online operation, optimality and required data are discussed.
Regarding their applicability to online operation, it was seen that NN-EMSs and RB-EMSs result in EMSs that do not require a priori knowledge of the drive cycle during operation, and therefore can be applied online. On the other hand, an EMS is only obtained through DP if there is full a priori knowledge of the drive cycle and thus this method cannot be applied online.
Despite it not being possible to use DP online, EMSs generated using this method are globally optimal. NN and RB can be designed and optimised with prior information of drive cycles, but these drive cycles will probably not occur online. Therefore, EMSs generated with these methods will not operate in a globally optimum way online because the drive cycles will not match exactly.
Regarding the data necessary for each method, it is seen that DP requires a system model that is correct enough to determine accurate control decisions, but not over-detailed in terms of state and control variables, in order not to demand excessive computational power to run the optimisation. NN requires a fair number of training examples and can quite easily have additional variables included as inputs to improve the accuracy of the network. EMSs of RB type can be made simple, but in a reasonable amount of time they cannot be made as specific as possible to grasp all the nuances or consider all the variables to produce correct control decisions. At the same time, results from DP optimisation are not easy to interpret. Therefore, to use them as a benchmark for the development of RB strategies might require a significant development time.
3 The Proposed Method
In this paper, two methods are combined to generate optimised online energy management strategies for construction machines. Due to its capacity to determine globally optimal policies for multi-stage decision-making processes, Dynamic Programming (DP) is used as the optimisation technique. The Neural Network (NN) is the mathematical technique chosen to learn the decision-making process from DP and to implement it in online operation as an EMS. Figure 2 presents the process used to obtain EMSs from DP and NN.
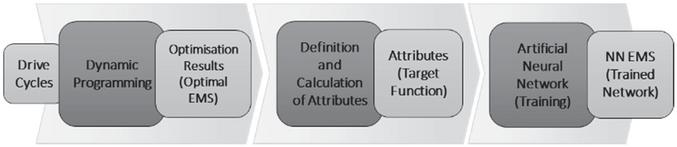
Figure 2 Representation of the process to obtain EMSs from DP and NN.
With the suitable machine model to hand, several distinct machine drive cycles are simulated using DP. The optimisation results will contain the variables of the machine model plus the optimal control decisions, e.g. defining whether energy is used from a main source or from a secondary one. The optimal control decision is the target function that the neural network is expected to learn.
Not every variable in the model has an influence on or directly affects the decision-making process. It is necessary to evaluate and select the ones that might affect the control decisions. A set of variables is selected to be the attributes, also called features, which are the inputs provided to the network, from which it will approximate the target function.
Once the attributes are defined, they are used for the neural network training. During the training process, neuron weights and biases are adjusted based on errors that are backpropagated from the network output. The error is a result of the comparison between the network’s output and the desired target function. After the training process, it is expected that the network will be capable of taking control decisions based on online measurements, leading to increased machine efficiency.
4 The Case Study
A parallel hydraulic hybrid wheel loader is used to implement, test and evaluate the proposed method. The machine concept is presented in Figure 3. It is expected that the machine will have higher efficiency by recovering and reusing braking energy.
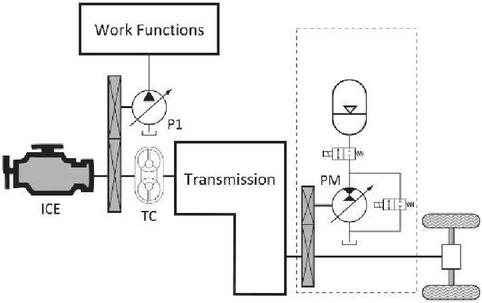
Figure 3 Parallel hydraulic hybrid wheel loader concept (adapted from [12]).
The goal of using this concept is to reduce the torque converter energy losses that mainly occur due to the high converter slip during the bucket-filling operation.
A quasi-static, backwards-facing model of the machine is used for the optimisations and simulation. The model includes the combustion engine (ICE), work functions as a pump (P1) supplying hydraulic power, the torque converter (TC), the transmission, the drivetrain and the parallel hybrid system as secondary energy source. This contains the hydraulic pump-motor (PM), the accumulator and valves. The model is the same as the one presented by [12]. Its inputs are the torque and speed at the wheels and the power consumed by the work functions and auxiliary functions. It has two state variables, the accumulator State of Charge (SOC) and the displacement of the PM.
By controlling the PM displacement setting as the control variable, the energy recuperation or reutilisation is performed. The objective is to determine, first through optimisation and then through the neural network in online operation, the displacement setting that leads to optimal fuel consumption. This is the resultant EMS.
A fuel consumption optimisation problem is formulated as shown by the authors in [12]. Due to the discrete nature of DP, it outputs the optimal displacement setting as discrete values for the whole drive cycle; this is the optimal EMS. The optimisation problem is implemented in a DP tool in Matlab, which can be found at [25].
A framework that implements the process illustrated in Figure 2 was developed in Matlab. Functions available in Matlab for designing, training and evaluating neural networks were used. The machine’s operation with the trained neural network as the controller for the PM displacement setting was simulated for the reference drive cycle.
4.1 Data, Network and Training
The supervised training of the network requires a large number of examples, also called instances. This is to increase their ability to find generalisation rules that are also stable in unseen cases that were not provided to them during the training.
According to the process illustrated in Figure 2, the first task is to have drive cycle data. A drive cycle containing data recorded from three short-loading cycles of a wheel loader is used as reference. Randomisation factors are applied to the reference drive cycle to generate more drive cycles. This is valid to a certain extent because short-loading cycles of wheel loaders are repetitive. On the other hand, one could argue that this method is not suitable to generate sufficient training data because, if a large number of cycles is used, they would in the end just be averaging around the reference cycle. The training process outcome would be a network trained for the reference cycle and not for different scenarios. Therefore, to reduce this effect, only ten cycles are generated. Machine speed data for a number of cycles, including the reference cycle, is shown in Figure 4.
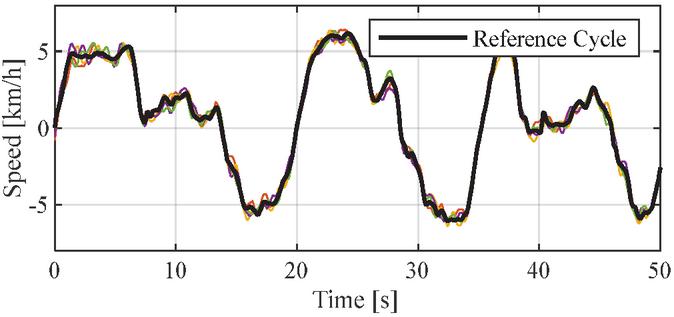
Figure 4 Reference and generated drive cycles for the neural network training and evaluation.
In the following task, according to Figure 2, the machine model was applied, together with the ten cycles in the DP optimisations, to obtain the optimal control decisions and the variables from which the attributes are selected.
According to Figure 2, after the optimisations, the task is to select the attributes that will be inputs for the network. A small number of these avoids an excessively large network. Consequently, only the variables that seem to have a direct influence on the control decisions are selected. The target function and the selected attributes are listed in Table 1.
Table 1 Target function and attributes for the neural network training
| Target Function | Symbol |
| Pump/Motor Displacement Setting | |
| Attributes (Network Inputs) | |
| Pump/Motor Displacement | |
| Accumulator SOC | |
| Machine Speed | |
| Machine Traction Force | |
| Kick-Down Signal | |
| Transmission Gear Ratio | |
| Work Functions Power | |
| Engine Speed | |
| Engine Torque |
Tests were carried out using more or fewer attributes than those presented in Table 1. With fewer attributes, the network could not approximate the target function in an acceptable manner. With more attributes, the network did not significantly improve the target function approximation.
The subsequent task is the network training. Here, data from each DP optimisation provides the attribute values and the respective optimal control value for each instance. These are the examples for training the network. One instance is the information from one time-step sample of the optimisations; there is no time-related information provided to the network. The training process is carried out in Matlab using the available training functions. The reference cycle is not used for training, but is used for evaluation of the training.
In this study, a feedforward network was used. To increase its accuracy, instead of designing it to predict a continuous value for the control signal, the same discretisation from the DP control variable is applied to its output. This means that there is the same number of output neurons as discretised control values. It is a classification network in which the output neuron with the highest value determines the control signal value, . Several tests were carried out with a continuous value output network; however, they were not able to achieve a target function approximation as good as that of a discretised output network.
Regarding the size of the network, reference [25] mentions that a large network, with many neurons and layers, might reproduce noise contained in the data and move away from generalisation. The selected neural network contains 9 inputs, 31 neurons at the hidden layer and 21 neurons at the output layer. The network training process initialise with random initial values for the weights and biases. Several trainings are made until a satisfactory and acceptable result is achieved.
Once the trained network is selected, it is used to control the wheel loader hybrid system in a forward-facing simulation. Figure 5 presents the model simulation process using the neural network as the energy management strategy.
During simulation, drive cycle data (), state variables from the previous time-step () and control signals () are provided as inputs. The model computes the new state variables () and dependent variables (). From the cycle data, new states and dependent variables, the attributes are calculated for the neural network (NN), which then calculates the new control signal that is used in the next time-step.
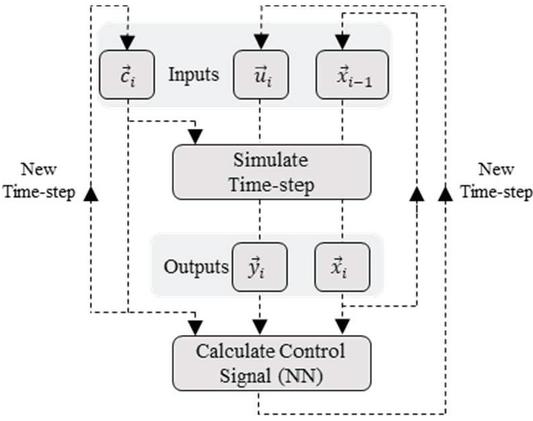
Figure 5 Model simulation.
4.2 Comparison with a Rule-based EMS
In order to compare the network’s performance, a Rule-based EMS was also implemented. It is the same as the one presented in [12]. The objective is to have an EMS that is as simple as possible. Therefore, the following three rules are defined:
• Charge energy storage with braking energy;
• Discharge energy storage when KD active;
• Discharge energy storage for high-traction torque.
Charging the energy storage with engine power is not allowed. Rules are also added to stop the discharge when pressure is approaching the accumulator’s pre-charge pressure and to stop charging when approaching the maximum pressure. The discharging and charging rates are set to maximum by controlling the PM’s displacement setting () to 1 or 1. This corresponds to the idea of fully using the stored energy for the bucket filling.
5 Results
The output of the trained neural network () is used to control the displacement setting of the parallel pump/motor () in a simulation framework, as shown in Figure 5. The network’s output control actions result in the energy management.
Results from the Neural Network Energy Management Strategy (NN-EMS) are compared with the Dynamic Programming Energy Management Strategy (DP-EMS) and the Rule-based Energy Management Strategy (RB-EMS). The reference drive cycle, which was not used for training the network, is used for evaluation.
First, the presented results are used to show that DP-EMS is consistent and can be used as a reference for training and evaluation of the network performance. Figure 6 presents a comparison of the machine speed and accumulator SOC.
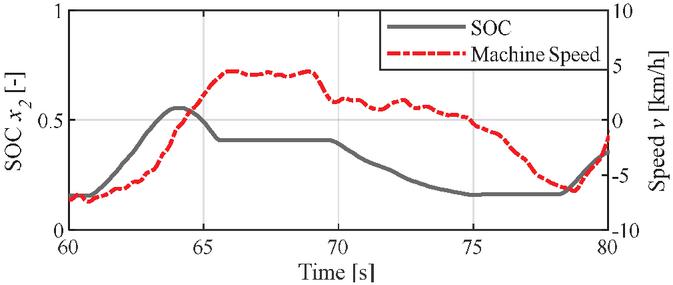
Figure 6 DP-EMS – Machine Speed vs. SOC.
When the machine is reversing and brakes, at around 60 to 64 seconds, the accumulator is charged. Between 70 and 75 seconds, the machine is in bucket-filling phase during which the accumulator is discharged. These two main events exemplify the consistency of the optimal EMS from DP.
The first comparison between the DP-EMS and the NN-EMS is related to the capacity of the network to learn the DP decision-making process. The results are show in Figure 7.
For this setup, the NN-EMS was able to accurately predict the DP control decisions during around 85% of the drive cycle. This shows that the network was able to generalise the target function and learn how to control the machine for unseen cases, since the reference cycle was not used for training. This can be seen either in Figure 7a, where the control signals are equal for most of the drive cycle, or in Figure 7c, where the resultant SOC either increases or decreases around the same time in both EMSs. It becomes clear in Figure 7c that there is room for improvement in terms of the intensity of charges and discharges of the secondary energy source for certain parts of the cycle.
From Figure 7 it can be affirmed that the proposed process resulted in a neural network that learned the DP decision-making process with a high degree of accuracy for most of the drive cycle. This can be translated for this specific case study as: the NN-EMS learned when to recover or reuse braking energy.
Figure 8 presents a comparison between the PM displacement setting () and SOC () for the DP-EMS, the RB-EMS and the NN-EMS.
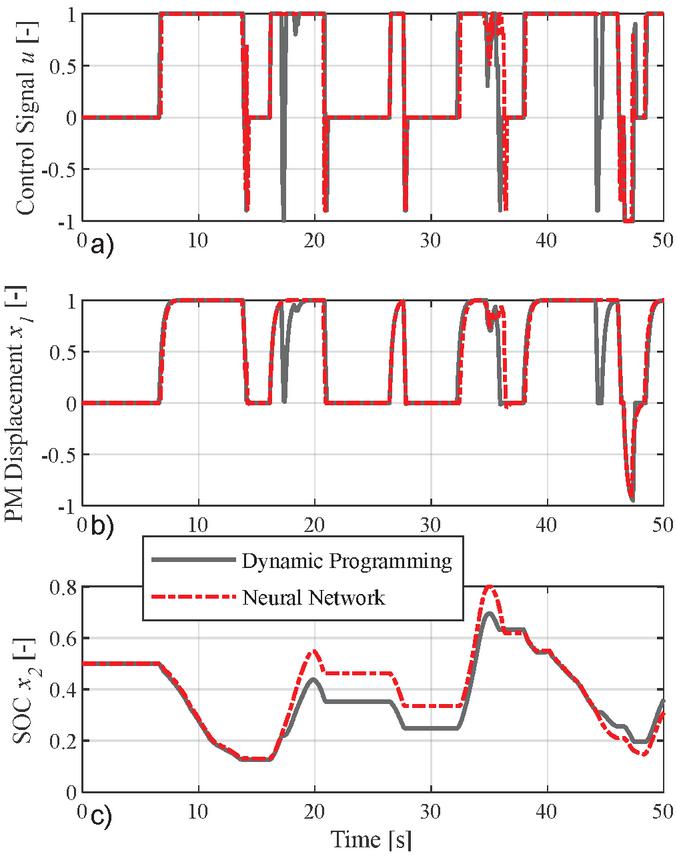
Figure 7 Comparison between DP-EMS and NN-EMS.
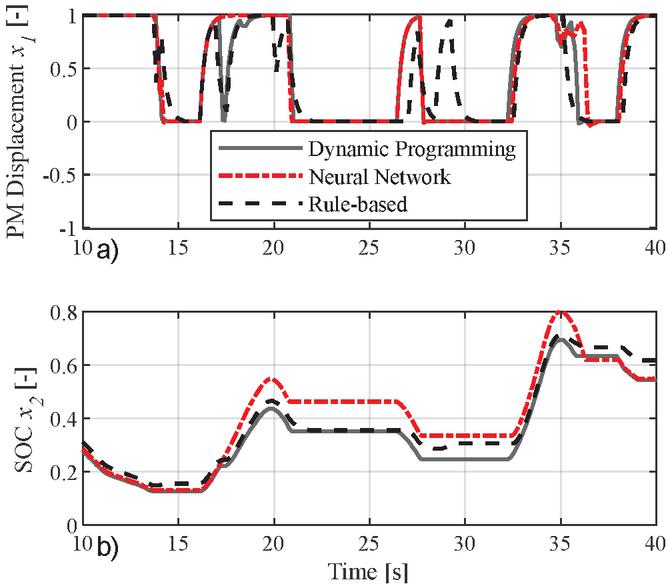
Figure 8 Simulation results for EMS comparisons with respect to: Pump/motor displacement and accumulator state of charge.
Both the NN-EMS and the RB-EMS are capable of controlling the secondary energy source similarly to the DP-EMS. At certain moments, the NN-EMS shows a behaviour more similar to the DP-EMS, at others the RB-EMS shows a more similar behaviour. This is observed in Figure 8.
Between 15 and 20 seconds in Figure 8a, it is seen that the DP and RB control actions make the displacement of the PM go to zero and back to maximum. At the same time, the NN control action maintains maximum displacement. The outcome of the NN-EMS different control action is a higher accumulator charge, as observed in Figure 8b during the same interval. Despite the following NN-EMS control actions, between 20 and 35 seconds, being basically the same as the DP-EMS, the deviation in SOC is still present. This shows that even when the SOC is not the same, the NN learned when and how much of the stored energy to recover or reuse for most of the drive cycle.
The results for volume of consumed fuel are presented in Table 2. They are relative to the optimal fuel consumption from DP-EMS. The negative value means that they had higher fuel consumption when compared with the optimal DP-EMS. The NN-EMS resulted in lower fuel consumption than the RB-EMS.
Table 2 Fuel consumption reduction compared to DP-EMS
| NN-EMS | RB-EMS | |
| Fuel consumption reduction [%] | 2.0 | 3.5 |
The objective of this case study was to demonstrate the implementation of an optimised online energy management strategy based on neural networks and dynamic programming. It was demonstrated that a similar energy management capacity can be achieved, resulting in lower fuel consumption reduction, when compared to an RB-EMS. However, there are still a few considerations that must be mentioned regarding the NN-EMS and its implementation.
6 Discussion
For this case study, both the RB-EMS and the NN-EMS structures are very simple and therefore easy to implement. Each strategy can be further developed to yield even better results.
Considering an even more complex construction machine, it might become significantly more complex to derive and implement the RB-EMS strategy, because more rules must be formulated to cover additional scenarios. On the other hand, NN-EMS would handle more control variables in an easier way. It is basically necessary to change the number of neurons and adapt the respective output neurons for the extra control variables. This would allow the NN-EMS to still perform closer to optimality.
It is expected that the NN-based method can be applied to different machine concepts. The requirement is to build consistent machine models for DP optimisation, to have enough drive cycles to cover different operational conditions and to design and train an NN by providing the necessary variables to allow it to learn the DP optimal decision-making process.
One downside is that, even if the NN learns the DP decision-making process, it is still difficult to interpret the EMS and the decisions made. According to [17], the weights learned by the network are often difficult for humans to interpret; learned neural networks are less easily communicated to humans than learned rules.
Another point to be discussed is the representativeness of the model used for DP. Due to the required computational power, models for DP optimisations cannot account for many state variables. However, they can capture important dynamic effects that directly affect the operation of the hybrid system.
When it comes to the selection of variables to be provided as inputs for the NN learning, it is desirable to use as few as possible to reduce the required computation effort. Therefore, it is necessary to identify which have greater influence on the control decision. This requires knowledge about the machine and its behaviour. Such knowledge could be retrieved and identified from the DP optimisation results as well.
In order to apply the proposed method to generate an EMS for real-life operation, a few aspects must be taken in account. The first concerns the variables used for the training; it is possible to measure all of them from the machine, and none of them is a control command from the driver. The second concerns the data used for training and, clearly, more data is necessary to train a network for real application. A final aspect is that such networks should be accompanied by a safety structure that prevents incorrect outputs from being applied to the system.
7 Conclusions
This paper presents a method to derive optimised online energy management strategies for construction machines. Despite presenting a case study for a parallel hydraulic hybrid wheel loader, the method seems to suit other machines as well. This is because it depends on a model for Dynamic Programming optimisations which can be made for different machines, and also because different signals that are relevant for other machines can easily be used as inputs for a neural network.
It was shown that a simple neural network is able to reproduce in online operation the decision-making process of dynamic programming with high accuracy. The results from the Neural Network Energy Management Strategy were closer to optimal and better than those from the Rule-based Energy Management Strategy. This is also because it takes into account more variables and scenarios as inputs; therefore, it can generalise the target function with greater accuracy than Rule-based Energy Management Strategies.
Acknowledgement
This research is supported by the Brazilian Coordination for the Improvement of Higher Education Personnel (CAPES), the Brazilian National Council for Scientific and Technological Development (CNPq) and the Swedish Energy Agency (Energimyndigheten) Grant Number P49119-1.
References
[1] A. M. Ali and D. Söffker, “Towards optimal power management of hybrid electric vehicles in real-time: A review on methods, challenges, and state-of-the-art solutions,” Energies, vol. 11(3), 476, February 2018. DOI: 10.3390/en11030476.
[2] W. Enang and C. Bannister, “Modelling and control of hybrid electric vehicles (A comprehensive review),” Renewable and Sustainable Energy Reviews, vol. 74, pp. 1210–1239, March 2017. DOI: 10.1016/j.rser.2017.01.075.
[3] M. A. Karbaschian and D. Söffker, “Review and comparison of power management approaches for hybrid vehicles with focus on hydraulic drives,” Energies, vol. 7, pp. 3512–3536, May 2014. DOI: 10.3390/en7063512.
[4] W. Zhang et al., “Energy management strategies for hybrid construction machinery: Evolution, classification, comparison and future trends,” Energies, vol. 12, 2024, May 2019. DOI: 10.3390/en12102024.
[5] J. Wang, Z. Yang, S. Liu, Q. Zhang and Y. Han, “A comprehensive overview of hybrid construction machinery,” Advances in Mechanical Engineering, Vol. 8(3) 1–15, 2016. DOI: 10.1177/1687814016636809.
[6] P. Casoli, A. Gambarotta, N. Pompini and L. Riccò, “Hybridization methodology based on DP algorithm for hydraulic mobile machinery: Application to a middle size excavator,” Automation in Construction, vol. 61, pp. 42–57, January 2016a. DOI: 10.1016/j.autcon.2015.09.012.
[7] K. Baer, Simulation-Based Optimization of a Series Hydraulic Hybrid Vehicle: Division of Fluid and Mechatronic Systems. Doctoral Thesis. Department of Management and Engineering. Linköping University, Sweden. 2018. ISBN 978-91-7685-344-3.
[8] A. Somà, “Trends and hybridization factor for heavy-duty working vehicles,” Intech, June 2017. DOI: 10.5772/intechopen.68296.
[9] I. Naskoudakis and K. Petroutsatou, “A thematic review of the main research on construction equipment over recent years,” Periodica Polytechnica Architecture, vol. 47(2), pp. 110–118, January 2016. DOI: 10.3311/PPar.10384.
[10] V. Krithika and C. Subramani, “A comprehensive review on choice of hybrid vehicles and power converters, control strategies for hybrid electric vehicles,” International Journal of Energy Research, vol. 42(5), pp. 1789–1812, March 2018. DOI: 10.1002/er.3952.
[11] H. Lee, C. Kang, Y. Park and S. W. Char, “A study on power management strategy of HEV using dynamic programming,” EVS29 International Battery, Hybrid and Fuel Cell Electric Vehicle Symposium. Canada. June 2016.
[12] K. Uebel, H. Raduenz, P. Krus, and V. J. De Negri, “Design optimisation strategies for a hydraulic hybrid wheel loader,” in: ASME/BATH Symposium on Fluid Power and Motion Control (FPMC2018). Bath, United Kingdom, September 2018.
[13] F. Wang, M. Azrin, M. Zulkfli, Z. Sun, and K. A. Stelson, “Energy management strategy for a power-split hydraulic hybrid wheel loader,” Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, vol. 230(8), pp. 1105–1120, July 2016. DOI: 10.1177/0954407015600899.
[14] Y. L. Murphey et al., “Intelligent Hybrid Vehicle power control – part I: Machine Learning of Optimal Vehicle Power,” IEEE Transactions on Vehicular Technology, vol. 61(8), pp. 3519–3530, October 2012. DOI: 10.1109/TVT.2012.2206064.
[15] R. Bellman, Dynamic Programming. Princeton, NJ: Princeton University Press, 1957.
[16] D. P. Bertsekas, Dynamic Programming and Optimal Control – Volume I, 3rd Ed. Nashua, NH, Athena Scientific, 2005.
[17] T. M. Mitchell, Machine Learning. New York, NY: McGraw-Hill, 1997.
[18] M. Sprengel and M. Ivantysynova, “Neural network based power management of hydraulic hybrid vehicles,” International Journal of Fluid Power, vol. 18(2), pp. 79–91, July 2017. DOI: 10.1080/14399776.2016.1232117.
[19] C. Majed, S. H. Karaki, and R. Jabr, “Neural network technique for hybrid electric vehicle optimization,” Proceedings of the 18th Mediterranean Electrotechnical Conference. Cyprus, April 2016.
[20] J. Park, Z. Chen, and Y. L. Murphey, “Intelligent vehicle power management through neural learning,” The 2010 International Joint Conference on Neural Networks (IJCNN), pp. 1–7, July 2010. DOI: 10.1109/IJCNN.2010.5596725.
[21] Z. Chen, C. C. Mi, J. Xu, X. Gong, and C. You, “Energy management for a power-split plug-in hybrid electric vehicle based on dynamic programming and neural networks,” IEEE transactions on Vehicular Technology, Vol. 63, No. 4, pp. 1567–1580, May 2014. DOI: 10.1109/TVT.2013.2287102.
[22] C. W. Yen and M. L. Nagurka, “Design of predictive controllers by dynamic programming and neural networks,” Proceedings of the American Control Conference. Denver, CO, pp. 1284–1289, June 2003. DOI: 10.1109/ACC.2003.1239766.
[23] S. Hui and J. Junqing, “Research on the system configuration and energy control strategy for parallel hydraulic hybrid loader,” Automation in Construction, vol. 19(2), pp. 213–220, March 2010. DOI: 10.1016/j.autcon.2009.10.006.
[24] H. T. Do, “Energy management of parallel hydraulic hybrid wheel loader with focus on fuel consumption minimization,” Master Thesis, KTH Royal Institute of Technology, 2018.
[25] O. Sundström, and L. Guzzella, “A generic dynamic programming Matlab function,” 2009 IEEE Control Applications, (CCA) & Intelligent Control, no. 7, pp. 1625–1630, July 2009. DOI: 10.1109/CCA.2009.5281131.
[26] E. Alpaydin, Introduction to Machine Learning, 2nd ed. Cambridge, MA: MIT Press, 2010.
Biographies

Henrique Raduenz received the M.Sc. degree in Mechanical Engineering at the Federal University of Santa Catarina (UFSC), Brazil, in 2018. Currently he is doing his doctoral studies at UFSC and at Linköping University, Sweden. His topic of research is fluid power systems for mobile machines.

Liselott Ericson received a Ph.D in hydraulics at Linköping University (LiU), Sweden, in 2012. She currently works as an associate professor at Fluid and Mechatronic Systems at LiU. The areas of interest include pump and motor design, electro-hydraulic systems, modelling and simulation.

Karl Uebel received his M.Sc. degree in 2009 and joined Volvo Construction Equipment in 2014 as a research engineer and driveline leader for wheel loaders. He received his PhD degree in 2017 from Linköping University with the topic Conceptual Design of Complex Hydromechanical Transmissions. In 2021 he changed position to Global Electromobility System Architect with the focus on driveline and system electrification for Volvo CE products.

Kim Heybroek received his M.Sc. degree in mechanical engineering from Linköping University (LiU), Linköping, Sweden, in 2006. In 2008, he joined Volvo Construction Equipment in Eskilstuna, where he is currently working as a Research Engineer and has a Specialist role in the field of hydraulics. In 2017, he received the Ph.D. degree in hydraulics at the Department of Fluid Power and Mechatronic Systems (FluMeS) at LiU.

Petter Krus is a professor and head of division of Fluid and Mechatronic Systems at Linköping University in Sweden. He is also holder of the Swedish Endowed Chair in Aeronautics at “Instituto Technólogico Aeronáutica”, ITA in Brazil. His field of research is in fluid power systems, aeronautics, systems engineering, modelling and simulation and design optimisation.

Victor J. De Negri is professor at the Federal University of Santa Catarina, Head of Laboratory of Hydraulic and Pneumatic Systems – LASHIP at the Department of Mechanical Engineering. Currently he is the coordinator of SC2C.Aero – Santa Catarina’s Center of Converge for Aerospace Technologies. He is a member of ASME, GFPS and ABCM and Associate Editor of the International Journal of Fluid Power and the Journal of the Brazilian Society of Mechanical Sciences and Engineering. His research areas include the analysis and design of hydraulic and pneumatic systems and components and design methodology for automation and control systems. He has coordinated several projects with industry and governmental agencies in the areas of hydroelectric and wind power, vehicles and aeronautics, and industrial hydraulics and pneumatics.
International Journal of Fluid Power, Vol. 23_3, 411–432.
doi: 10.13052/ijfp1439-9776.2338
© 2022 River Publishers