A Piezo-Electric Valve Actuator for Hydraulic Exoskeleton Drives
Philipp Albrecht-Zagar* and Rudolf Scheidl
Institute of Machine Design and Hydraulic Drives, Johannes Kepler University Linz, Linz, Austria
E-mail: philipp.zagar@jku.at; rudolf.scheidl@jku.at
*Corresponding Author
Received 09 June 2022; Accepted 21 July 2022; Publication 29 September 2022
Abstract
In many exoskeleton applications where heavy lifting is involved (e.g. in military or industrial applications) hydraulic actuators are used because of their high power density. For such applications it is necessary to develop compact and light hydraulic components so that the exoskeleton’s mass and size are low and, therefore, wearing comfort is high and power consumption is reduced to a minimum. Crucial components of hydraulic exoskeletons concerning this weight aspect are hydraulic valves and particularly their actuators, since conventional solenoids contribute the lion share of valve size and weight. As one option to solve this weight and size problem the application of smart materials such as piezo-ceramics to electrically actuate hydraulic valves are seen. The contribution at hand deals with the systematic design of a piezo-actuator which shall be used to switch a hydraulic valve. To overcome the problem of very low strain of the piezo a mechanism for amplification via a bistable buckling beam is analyzed analytically and numerically and an actuator prototype is designed and manufactured. This paper intends to carve out crucial challenges such as the requirements for snapping through of the buckling beam, the bearings of the beam and the integration of the piezo stack.
Keywords: Piezoelectric actuator, Buckling beam, bistable, hydraulics, exoskeleton.
1 Introduction
There is a great demand for compact and light-weight hydraulic actuators which are used for example in exoskeletons (medical, military, etc.) [1]. By using smart materials such as magnetostrictive [2] or piezoelectric [3] actuators one can increase the power density of the switching circuit of a hydraulic valve thereby overcoming the need for heavy and highly dissipative external electromagnetic actuators. The problem which arises when using such actuator principles is especially the small displacement and the nonlinear and hysteretic character of the active material. In literature there are several solutions for these challenges. Hysteretic compensation is e.g. done by introducing the well-known preisach model and generalizations od it [4]. Problems that arise from the the small strain in piezo electric actuators are typically solved by using mechanical or hydraulic amplification mechanisms [5].
This paper discusses the design of a prototype for a piezoelectric actuator used for a hydraulic seat valve. It tackles the displacement issue by introducing an amplification mechanism which is based on a buckling beam and shows how to systematically design such actuators.
2 Specification
As described in the Introduction hydraulic actuators are used in many exoskeleton applications. Some typical applications of exoskeletons are the support of elevating and manipulating heavy loads or the enhancement of the gait of a person. The human body is capable of applying several hundred watts of mechanical power, hence, the exoskeleton, a device which acts as a makeshift for natural movements, must be able to continuously provide power of such order. In this work the starting point for deriving a reasonable specification is to demand for the hydraulic power of the actuator to be P 800 W and for the system pressure to be p 200 bar. The actuator should act upon a 2/2 directional control poppet valve which is operated via pulse width modulation. Hydraulic power and system pressure given above result in a flow rate of q P/p of 2,4 liters per minute. Using the rule of thumb 1 l/min 1 mm at 5 bar this results in an cross sectional area of 2,4 square millimeters. Given an assumed diameter of 4 millimeters the poppet’s stroke must be
| (1) |
hence, approximately 200 micro meters. As the valve should be actuated using pulse width modulation there is the necessity for the actuator to lift and lower the poppet reasonably fast. Therefore, the switching force F is specified as a typical value of 10 newtons.
Besides the quantitative specifications above also some qualitative constrains were introduced. Firstly, the mass and the size should be kept low because of the mobile nature and of the exoskeleton. Secondly, the valve should be bistable so that only the switching process and not the hold phase in the end positions need energy. The following table shows all specified parameters which represent the starting point of the actuator design.
Table 1 Parameters for specification
| Quantitative Specifications | ||
| Description | Symbol | Value |
| Hydraulic power | P | 800 W |
| System pressure | p | 200 bar |
| Actuation force | F | 10 N |
| Flow rate | q | 2,4 l/min |
| Switching time | t | 5 ms |
| Qualitative Specifications | ||
| Bistabel end points (on/off) of hydraulic valve | ||
| Small mass, e.g. 200 g | ||
| Small size, e.g. 50 mm 30 mm 20 mm | ||
The above mentioned specifications – especially the demand for a compact and light-weight hydraulic valve – suggests not to use an electromagnetic actuator, as the power density of such actuators is low compared to e.g. magnetostrictive or piezoelectric actuators. Therefore, a piezoelectric actuator was chosen to be integrated into the hydraulic valve.
3 Design
3.1 Buckling Beam
Typical piezo actuators change length in the order of approximately 1000 ppm of their initial length by applying the maximum voltage (e.g. 100 volts for low-voltage piezo stacks). This small change of size demands for amplification mechanisms in most applications which translates small amplitude and high force into large amplitude and moderate force. Typical displacement amplification principles are based on hydraulic or mechanical transmissions. Latter have the advantage to keep design simple but show high sensitivity to temperature as the piezo’s strain due to the electric field is only one order higher than differences in thermal expansion between the piezo material and a mechanical transmission made of steel. In this paper a mechanical amplifying mechanism based on buckling of a beam is presented. Although it also exhibits thermal expansion problems this will not further be addressed. One way to compensate the thermal expansion effect is described e.g. in [6].
A mechanical mechanism based on a buckling beam was chosen for amplification. Its transmission ratio is almost as high as for a toggle joint but there is no need for a bearing at the joint in the center. In Figure 1 the two principles are depict.
A buckling beam mechanism has two symmetrical buckling modes in the positive and negative y-direction which coincides with the design specification which demands a bistable hydraulic valve.
The buckling beam can be modelled using a one-dimensional approximation and the relationship
| (2) |
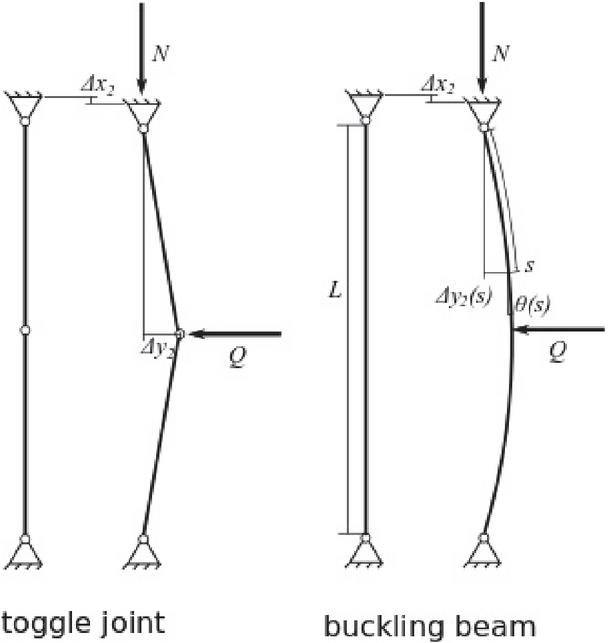
Figure 1 Toggle joint and buckling beam with their transmission ratio y/x at a given normal force N and a lateral force Q.
M is the bending moment, E and J the elasticity modulus and the geometrical moment of inertia respectively. k(s) is the beams curvature at position s, (s) is the angle between the deformed beam and the beam in initial position and s is the coordinate of the arc length of the beam. By determining the internal force variables (shear force and bending moment) of an infinitesimal piece of beam and by setting the resultant to zero the following differential equation can be derived.
| (3) |
Note that the model derived in Equation (3) neglects the longitudinal elasticity of the beam. In linear beam theory the harmonic functions (sin and cos) are approximated by their first-order representatives. This leads to a linear ordinary differential equation which is easy to solve but which does not incorporate the bifurcation properties resulting in buckling solutions. The nonlinear differential equation cannot be solved in closed form but can be approximated by a third-order Ritz-Ansatz function for :
| (4) |
The coefficients b and b are calculated to and respectively by inserting proper boundary conditions of the differential equation Equation (3). These conditions are 1. d/ds(q(s)) 0 for , i.e., the curvature of the beam is zero at the end points (for s 0 this is trivially satisfied) and 2. for /2, i.e., the beam’s tangent in the center is parallel to its initial position before buckling which must be fulfilled due to symmetry arguments. Therefore, in Equation (4) is the angle of the deformed beam at the end points and the only independent parameter of the ansatz function. The energy of the complete (static) system can be represented by three potentials: the potential of the normal force N (), the potential of the lateral force Q () and the potential of elastic deformation ().
| (5) | |
| (6) | |
| (7) | |
| (8) |
Approximating the sine function by its third-order polynomial series for small angels and neglecting the lateral force two nontrivial approximate solutions for the nonlinear differential equation can be found by finding values of for which the total potential energy () is extremal. Both values for have the same magnitude but different sign which corresponds to the two stable post-buckling solutions in positive and negative y-direction. They are a function of the applied forces (N, Q) and are real and, therefore, physically valid in certain regions. For given lateral force Q, the value for N at which the angle of the endpoints gets real is the critical normal force at which the beam starts buckling.
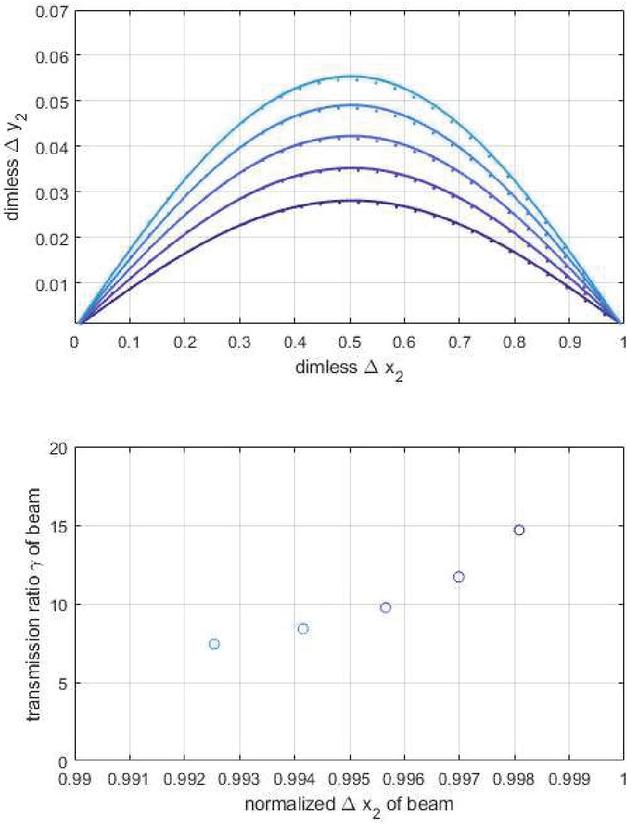
Figure 2 Force versus displacement for a piezo stack at zero and maximum voltage which is preloaded by a spring.
Figure 2 shows the numerical solution of the nonlinear differential equation at normal forces greater than the critical buckling force (solid lines) and compares it to the approximate solutions obtained by the Ritz-ansatz (shown as dotted lines). The values for the actual displacement is calculated through scaling the value by the initial length of the buckling beam, L. The diagram below in Figure 2, shows the transmission ratio of numerical solution of the buckling beam for a scenario were no lateral force is exhibited. Especially in the center where the highest displacement in the y-direction takes place when buckled the transmission ratio is dependent from the lateral force. This increases the compliance of the actuator, thereby, resulting in a pressure dependence of the switching characteristics of the hydraulic valve.
Following values were chosen for the buckling beam to fulfill all requirements from the previous section:
Table 2 Parameters for buckling beam
| Quantitative Specifications | ||
| Description | Symbol | Value |
| Young’s modulus | E | 210 GPa |
| Length | L | 26 mm |
| Width | B | 10 mm |
| Thickness | H | 0.3 mm |
The critical normal force, N, of the buckling beam in Figure 4 (with parameters shown in Table 2) is approximately 55 newtons. In a quasi-static scenario every newton exceeding the critical normal force is converted in a lateral force scaled by 1/ (the inverse transmission ratio). When the buckling begins (if the beam is infinitesimal perturbed in let’s say the positive y-direction) the transmission ratio goes to infinity. For simplicity, this can be shown for the transmission ratio of the toggle joint (compare to Figure 1 on the left hand side):
| (9) |
Therefore, the question on the dynamics of the actuator, i.e. how a mass which is coupled to the buckling beam is accelerating under a certain normal force acting on the buckling beam is non-trivial. It cannot be answered with the insights gained above and demands for numerically solving the coupled nonlinear dynamical system.
3.2 Piezoactuator
A simple standard model for a piezo stack is defined by the American national standard IEEE Std 176-1987 [7]. It is based on linear piezoelectricity and linear elasticity theory, both coupled by their corresponding static coefficients. In the one-dimensional case the state equations of the piezo stack can be described by the equations
| (10) | ||
| (11) |
where D is the electric displacement, E is the electric field, S is the strain of the piezo, is the mechanical stress, c is the piezoelectric coefficient, c is the elastic compliance coefficient and is the permittivity of the piezo material. In one dimension the electric displacement, the electric field, the mechanical stress and the strain can be described as
| (12a) | ||||
| (12b) |
In Equation (12a) Q is the total electric charge on the piezo’s electrodes stack, A is the area of one electrode, N is the number of piezo slices which are stacked, U is the applied voltage to the piezo stack and h is the thickness of one piezo slice in the stack. These simplified relations model the electrostatic field only in the normal direction without considering stray effects at the edges. Equation (12b) describe the mechanical relations where F is the normal force which acts on the piezo and X is the length of the piezo at a given voltage and stress. Inserting Equations (12) in (10) and (11) and solving for X shows that the change in length vs. voltage and normal force is a family of straight lines (Equation 13).
| (13) |
This simple model does not consider nonlinearities which arise from the hysteretic nature of all piezo ceramics or from dissipative effects but is well-suited for calculating the major properties of a piezo actuator during design phase.
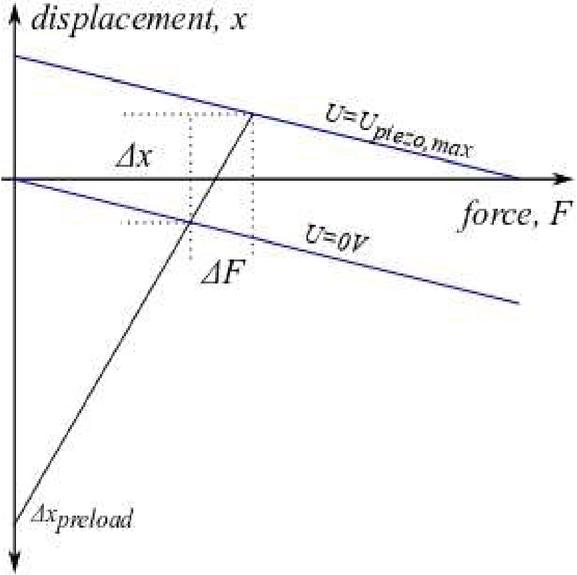
Figure 3 Force versus displacement for a piezo stack at zero and maximum voltage which is preloaded by a spring.
IEEE-Std model suggests a force characteristic of the piezo which is shown as the blue lines in Figure 3 for zero and maximum voltage. In dynamic applications the piezo stack has to be preloaded. This is because the laminated ceramic material is sensitive when tensile stress acts upon it e.g. when the stack is contracted. The preload can be established by a spring with a spring constant which is at least one or two orders lower than the spring constant of the piezo stack itself. This arises from the fact that a stiff spring would reduce the effective displacement of the piezo stack ( in Figure 3) severely. From this argument it follows that the lower the stiffness of the preload spring the better the design. Of course there are natural constraints which shall be discussed in the next few lines. To keep the design of the prototype simple the preload spring was realized as a U-part in Figure 4. This implies that the U-part not only has to act on the buckling beam but also has to make sure that the piezo stack is preloaded properly. For the beam to buckle a force of approx. 55 newtons has to be applied (see subsection A) and, therefore, with the gear transmission ratio of five the spring has to be preloaded at least with 425 newtons (150 newtons for preloading and 275 newtons for buckling).
3.3 Spring Element
The buckling beam is clamped in a U-shaped steel part. It not only holds the beam in place but also has the function of, firstly, transforming the displacement and force by a factor of approximately 5 and, secondly, acting as a spring which preloads the piezo stack (see previous section) as well as applying the normal force to the buckling beam. Figure 4 shows a photograph of the manufactured device and a CAD model of the piezo actuator prototype.
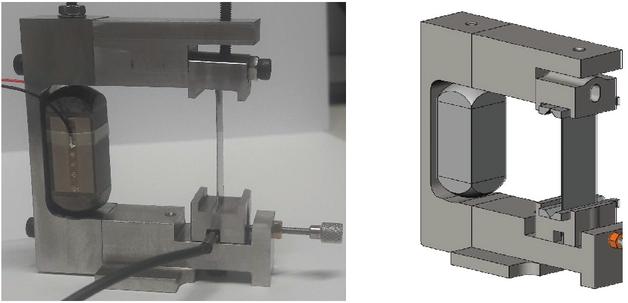
Figure 4 Piezo actuator prototype.
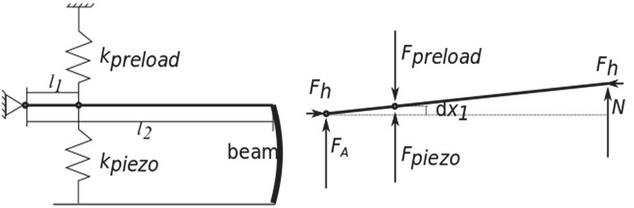
Figure 5 Piezo actuator prototype.
The U-shaped part is designed to show a spring constant of 2 newtons per micrometer which is approximately one percent of the stiffness of the piezo stack itself (the necessity of which was described in the previous section). Due to the fact that the piezo stiffness is much greater than the stiffness of the preload spring the small displacement of the piezo stack will not significantly change the preload force. Additionally, the preload force acting on the piezo stack which results in a diminished displacement (see Equation 13) can also be neglected.
In Figure 5 on the right hand side the force diagram of the construction is shown. Using the equilibrium of moments in the bearing it becomes clear that
| (14) |
Therefore, for the buckling to be fulfilled () and the piezo to be preloaded with approximately 150 newtons minimum the preload force F was chosen to be 450 newtons with .
As mentioned above the curved part of the U-shape was designed to act as the preload spring. Considering the desired spring constant the parameter b seen in Figure 6 of the part was calculated using the simple relation
| (15) |
Using the relations /s for small angels and M F s the spring stiffness can be calculated by taking the derivative dF/dx. This value was set to 2 newtons per micrometer to get the value for parameter
| (16) |
where is the preload spring constant. This gives the value b 2,9 mm. The optimization procedure for b in SolidWorks aiming the spring constant value of 2 newtons per micrometer results in a value for b of 2,8 millimeters which was chosen for the final design of the prototype.
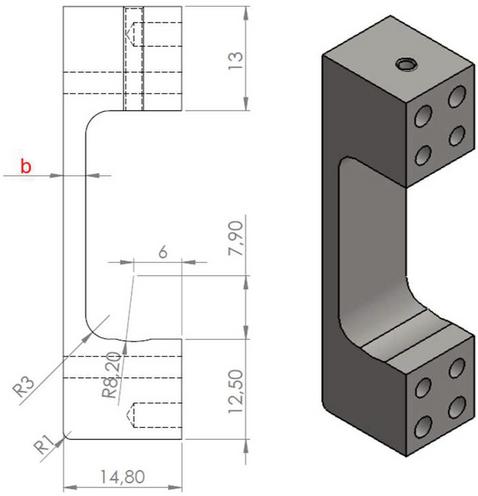
Figure 6 Piezo actuator prototype.
For the design of the spring element not only the theoretical spring constant but also the maximum stress in the material was considered. For this reason the edges of the U-shape were designed bevel-edged.
3.4 Bearing
The buckling beam is mounted between the upper and lower part of the U-shape and is pivoted to sliding contact bearings. Three different bearings where manufactured: a steel bearing with V- and a U-shaped cross section and a V-shaped jewel bearing made out of rubies. The latter one are typically used in high precision micro-mechanical parts such as watches, compasses or gyroscopes. In these applications – where normal forces are low - they exceed other materials when it comes to static friction as well as wear [8–11]. However, to the best of the author’s knowledge there exist no published studies about friction coefficients in V-shaped jewel bearings with high normal stresses in literature. Therefore, this concept was incorporated in the piezo actuator prototype.
The massless buckling beam pinned at both ends with a valve poppet (modelled as a point mass) in the center of the beam has a linearized resonance frequency of approximately
| (17) |
For a mass m of 10 gramms the resonance frequency f yields approximately one-hundred Hertz. For a theoretical periodic behavior (buckling from one stable position to the other stable position and back again) the amplitude of the angle would be approximately two degrees. Introducing the the friction coefficient the dissipated energy in the bearing in one cycle can be estimated:
| (18) |
The stored energy in the system in the buckling position (at the beginning of an aforementioned cycle) is approximately
| (19) |
This leads to a quality factor of
| (20) |
It lays between 3,6 (for high of 0,5) and 18,3 (for low of 0,1). The result of this severely simplified approximation highlights the necessity of low-friction bearings in this prototype.
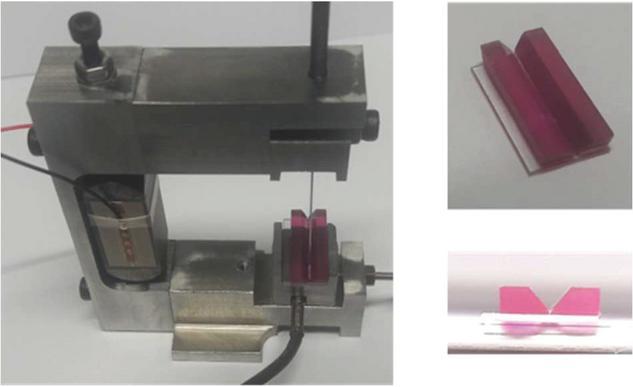
Figure 7 Jewel bearing assembled in prototype (left) and mounted on the sapphire chip view from top and from the front (right).
The jewel bearing was manufactured by gluing two rubies on a sapphire chip and assembling it to the bottom and top part of the end pieces of the U-shaped part. In Figure 7 the mounted bearing as well as the top and side-view of a jewel bearing is shown.
4 Conclusions
The paper at hand show a systematic way how to design a piezo actuator for hydraulic valves which uses a bistable buckling beam as displacement amplification mechanism. It shows how to model and approximate the solution of the buckling beam, introduces a piezo standard model to describe the piezo stack and provides a possibility to overcome friction in the pinning beam bearing.
Acknowledgment
This work has been supported by the COMET-K2 Center of the Linz Center of Mechatronics (LCM) funded by the Austrian federal government and the federal state of Upper Austria.
References
[1] R. Scheidl, “Digital fluid power for exoskeleton actuation – guidelines, opportunities, challenges”, The Ninth Workshop on Digital Fluid Power, September 7–8, 2017, Aalborg, Denmark.
[2] V. Apicella C. S. Clemente, D. Davino, D. Leone and C. Visone “Review of Modeling and Control of Magnetostrictive Actuators”, Actuators 2019, 8(2), 45.
[3] S. Yokota, K. Akutu, “A Fast-Acting Electro-Hydraulic Digital Transducer (A Poppet-Type On-Off Valve using a Multilayered Piezoelectric Device”, JSME International Journal, Series II, Vol. 34, No. 4, 1991.
[4] P. Ge, M. Jouaneh, “Generalized preisach model for hysteresis nonlinearity of piezoceramic actuators”, Precision Engineering Volume 20, Issue 2, March 1997, Pages 99–111.
[5] M. Ling, J. Cao, M. Zeng, J. Lin and D. J. Inman, “Enhanced mathematical modeling of the displacement amplification ratio for piezoelectric compliant mechanisms”, Smart Materials and Sructures, 25 075022, 11pp., 2016.
[6] P. Hantke, “Development of piezo-actuated pilot valve for water-hydraulic mining applications”, ÖP 6 (2003).
[7] An American National Standard – IEEE Standard on Piezoelectricity, ANSI/IEEE Std 176–1987.
[8] T. S. Sankar, P. I. Tzenov, “On Friction and Motion Accuracy in Jewel Bearing”” Tribology Transactions, 37:2, 269–276, 1994.
[9] T. S. Sankar, P. I. Tzenov, “The Steady-State Dynamics of Jewel Bearing with a Free Ball”, Tribology Transactions, 37:2, 403–409, 1994.
[10] X. Dai, Y. Wang, S. Yu, “Ferrographic analysis of pivot jewel bearing in oil-bath lubrication”, Wear, 376–377, 843–850, 2017.
[11] X. Dai, K. Zhang, C. Tang, “Friction and wear of pivot jewel bearing in oil-bath lubrication”, Wear, 302, 1506–1513, 2013. J. Clerk Maxwell, A Treatise on Electricity and Magnetism, 3rd ed., vol. 2. Oxford: Clarendon, 1892, pp. 68–73.
Biographies

Philipp Albrecht-Zagar Born May 29th 1989 in Graz (Austria). MSc of Electrical Engineering at Vienna University of Technology in 2014. Industrial research and development experience in Electronics (EE Elektronik, 2014–2018). Since Sept. 2018 employed at the Johannes Kepler University Linz as junior researcher, university assistant and PhD candidate.

Rudolf Scheidl Born November 11th 1953 in Scheibbs (Austria). MSc of Mechanical Engineering and Doctorate of Engineering Sciences at Vienna University of Technology. Industrial research and development experience in agricultural machinery (Epple Buxbaum Werke), continuous casting technology (Voest Alpine Industrieanlagenbau), and paper mills (Voith). Since Dec. 1990 Full Professor for Mechanical Engineering at the Johannes Kepler University Linz. Research topics: hydraulic drive technology with emphasis on digital fluid power and mechatronic design.
International Journal of Fluid Power, Vol. 23_3, 453–468.
doi: 10.13052/ijfp1439-9776.23310
© 2022 River Publishers