Energy Efficient and Redundant Steer-by-Wire for Articulated Non-road Mobile Machines
Vinay Partap Singh*, Mikko Huova and Tatiana Minav
Innovative Hydraulics and Automation, Tampere University, Tampere, 33720-Finland
E-mail: vinaypartapsingh@tuni.fi
*Corresponding Author
Received 30 November 2023; Accepted 18 April 2024
Abstract
The electrification of on-road vehicles has got momentum in recent years, but for Non-Road Mobile Machines there are still many barriers to cross. In order to completely eliminate the internal combustion engine or reduce its use, the energy loss in machines needs to be minimised at every possible section. One such part is the steering of heavy non-road mobile machines which has been unchanged to a large extent for decades, especially in articulated machines. The major cause of the industry being cautious in replacing the traditional steering system is its safety. As being a safety-critical system, it requires to comply with the highest safety standards. An articulated steered wheel loader has been selected as a case study in this article to first carry out a detailed hazard analysis to assess the machine performance levels required for steering. Two scenarios are selected for hazard analysis: 1. the wheel loader is on work site; 2. the wheel loader is travelling on road. To achieve the required performance level, the requirements of functional safety and safety integrity level of the steering are analysed. Based on corresponding standards and the required performance level for the steering, a new electro-hydrostatic-based steer-by-wire system is proposed. The proposed steering complies with safety standards for articulated steering and has the potential for energy saving. The simulation of the proposed system is carried out from an energy-efficiency point of view in MATLAB/Simulink. The proposed electro-hydrostatic steering system is compared to the traditional steering of a wheel loader in the Mevea digital twin environment and has been found to be substantially more energy efficient in the primary analysis. The simulations show that in conventional steering, 51% of energy is wasted in the steering valve alone, while in EHA (Electro-hydrostatic actuator) steering only 29% is wasted in the entire steering system.
Keywords: Non-road mobile machinery, hazard analysis, functional safety, articulated steering, electro-hydrostatic steering, electro-hydrostatic actuator.
1 Introduction
This paper contains a more extensive analysis of a Steer-by-Wire (SbW) system that was previously presented [1], with hazard analysis considering wider application range, and other safety standard considerations taken into account. The climate crisis is forcing governments and industries across all spectrums to make every possible effort to avoid or minimise fossil fuel consumption [2]. One of the biggest contributors to global carbon emissions is Internal Combustion (IC) engines in on-road and off-road vehicles. To address the issue of IC engine emissions, the on-road vehicle industry has a successful shift towards electrification, but the Non-Road Mobile Machines (NRMM) have completely different applications and power requirements. The NRMM not only need power to be transported from one point to another, but also to perform the work using different actuators and implements which usually is their primary function. Despite the heavy power requirements, the NRMM industry is progressing towards electric hybrid and other hybrid solutions, but that is mostly limited to the vehicle drivetrains, not the work functions and other actuators [3–5]. For the actuators of working implements, one promising solution is the electric motor controlled electro-hydrostatic actuator where reliability and robustness of hydraulic actuator is coupled with the superior controllability of electric motor to eliminate the throttling losses [6, 7]. However, in order to fully replace the IC engine or minimise its use, the losses in every important part of the system need to be minimised as well. One such part is the steering of the vehicle which is an essential and critical part of any moving machine, on-road or NRMM. The steer-by-wire replacing the traditional steering is one potential solution to eliminate losses from steering systems and has been proved by studies in industry and academia including [8, 9].
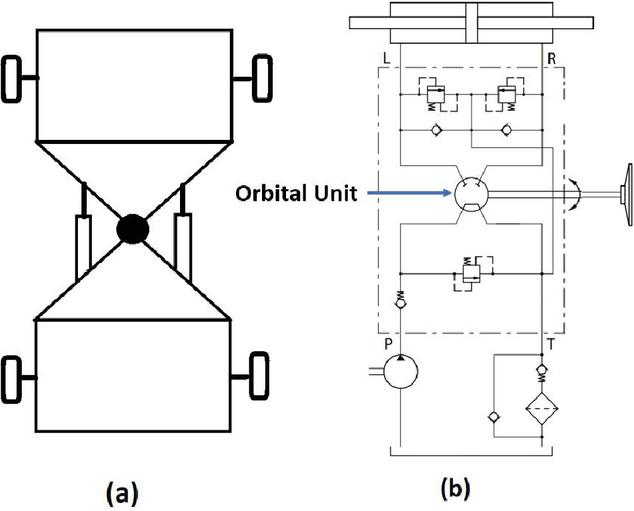
Figure 1 (a) Articulated steering concept (b) hydraulic schematic of a conventional articulated steering [11].
The steer-by-wire despite being proven energy efficient could only be implemented on a commercial scale in some passenger cars, but not in NRMM, especially with articulated steering. The articulated steered vehicle as shown in Figure 1(a) consists of two independent vehicle sections connected by an articulated point. To steer the vehicle, sections are rotated about the joint by using two hydraulic actuators placed at an optimised position [10]. The steering actuators in articulated steering are cross-connected and conventionally powered by the hydrostatic pump rotated by an IC engine. The control of steering is conventionally done by an orbital valve attached to the steering wheel, which in turn controls a proportional hydraulic directional control valve as shown in Figure 1(b) [11].
Limited studies have been carried out to propose an alternative to conventional steering, Daher et al. [14] have tested pump-controlled steering on a compact wheel loader where the steering is controlled by varying the volumetric displacement of a variable displacement pump rotating at a constant speed. The study does not take into consideration the ISO standard requirements and has no secondary steering, hence its adaptation on a commercial level can be doubted. An electrically controlled steering system for a wheel loader has been studied by Wang et al. [15] with a fault-tolerant capability having a secondary steering power source. In the said study a fixed displacement pump is controlled by an electric motor to control the required flow for steering actuators. The speed of the electric motor is controlled according to the steering command, but the final control of the steering is done by a conventional proportional valve controlled by an orbital valve in a similar way as conventional steering, resulting in throttling losses not being avoided. A dual-mode hydraulic steering system is proposed for wheel loader in [16], where two modes of steering are proposed. The steering in the said study has two separate steering control elements, one joystick and the secondary steering is by conventional steering wheel with an orbital and redirector valve. In case of failure of a primary steering control element which is a joystick, the operator must switch to the secondary control element which is the steering wheel. ISO 5010 strictly requires that the steering control element shall continue to be the steering control means for the operator in case of primary steering power source failure. In case a secondary control element is used, the same standard requires that if a conventional steering wheel is one of the steering control elements, it shall always be activated and have a higher priority than any other steering control element and shall be considered as the principal steering control element. The said study does not consider any of the above-mentioned requirements.
The present article proposes to address the gap described above for realistically implementing an energy-efficient steer-by-wire in articulated NRMM, in a systematic manner. Figure 2 shows the process adopted in the present article to propose the novel energy efficient and redundant steer-by-wire for articulated non-road mobile machines.
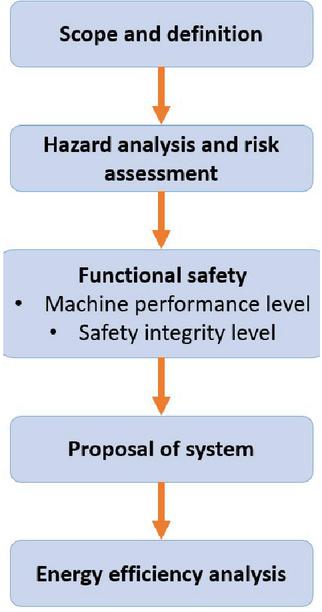
Figure 2 Process adopted for novel solution.
A wheel loader has been selected as a case study for further analysis. The second part of the article focuses on the hazard analysis related to the steering operation of a wheel loader in two different cases, first when the wheel loader is working at an off-road work site, and second for the case it is driven on the road. Based on the hazard analysis and risk assessment, the Machine Performance Level required (MPLr) are accessed in accordance with relevant ISO standards. This analysis further helps to determine the operation and safety aspects of the new steering system. The third part discuss about the functional safety of the steering and the requirements to achieve the desired Machine Performance Level (MPL) according to hazard analysis conducted. As the SbW inherently use Electronic Control Unit (ECU), the Safety Integrity Level (SIL) requirements in line with IEC (International Electrotechnical Commission) standards for the ECU of SbW in NRMM is also analysed. The fourth part of the article proposes a new electro-hydrostatic steering system with a potential to fulfils the relevant safety standards and performance level required based on the analysis conducted in previous sections. Any new system must be at least as safe as the one it is replacing, keeping in view that, the proposed system has potential to offer redundancy and reliability. The last part of the article demonstrates the energy-saving potential of the proposed electro-hydrostatic steering system. A simplified electro-hydrostatic steering is modelled in MATLAB/Simulink to analyse the energy consumption and loss distribution. A loader in Mevea digital twin environment [17] is operated on the same standard ‘Y’ work cycle as used in hazard analysis, to compare the energy consumption and loss of proposed electro-hydrostatic steering and conventional hydraulic steering system.
2 Hazard and Risk Analysis
The articulated steering in NRMM consists of two cross connected hydraulic actuators which are powered by a complex hydrostatic power and control unit, as shown in Figure 1(b) described in the previous section. Hence, the failure of the system, as well as in any of the individual actuators can lead to a hazardous scenario. Therefore, to carry out the hazard analysis of the NRMM equipped with articulated steering, it is necessary to also include the potential failure of the individual actuators. First, the basic introduction to hazard and risk analysis are described to explain the principles to determine the required performance levels, followed by case study in off-road and on-road operation of a wheel loader.
2.1 Principles of Hazard and Risk Analysis
A Hazard according to ISO 12100 [18] is a ‘potential source of harm’ whereas, a hazardous event is an ‘event that can cause harm’. The hazard analysis is completed according to ISO 5010:2019, which again refers to ISO 12100 for hazard relevance. It should be noted here that Automotive Safety Integrity Level (ASIL) as referred to in ISO 26262 [19] is not applicable here. Furthermore, the steering is considered a safety control system (SCS) in ISO 19014-1 which is referred to in ISO 5010 for the same purpose, hence hazard analysis should follow the guidelines and parameters specified in the said standard. The Machine Control System Safety Analysis (MCSSA) described in ISO 19014-1 is followed for the hazard and risk assessment.
The risk can be defined as the combination of the severity of the harm caused by a hazardous event, and the probability of its occurrence. Figure 3 shows the elements of the risk associated with any hazard.
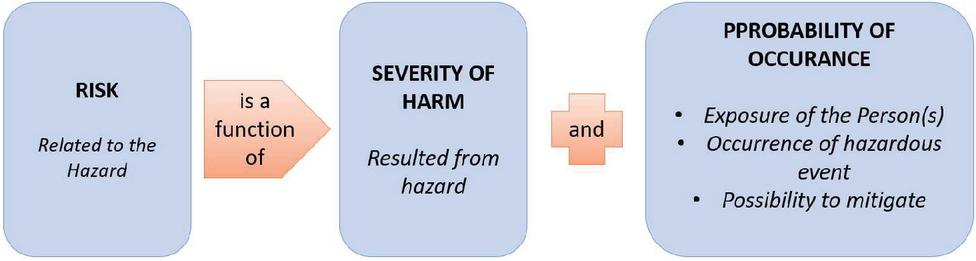
Figure 3 Elements of risk associated with hazard.
The severity of the harm, exposure of person(s), possibility to avoid or limit the harm, and its controllability can be classified according to ISO 19014-1 and categorised as follows.
| S0 | S1 | S2 | S3 |
| No significant injury, require only first aid | Injuries, requires medical attention, total recovery, reversible injury with no loss in work capacity after recovery. | Severe Injury, permanent loss in work capacity. | Fatality |
Table 2 Exposure to hazardous events
| E0 | E1 | E2 |
| E 1% | 1% E 10% | E 10% |
Here,
| (1) |
where A is application use case, P is person group exposure, and is H is hazard time. H can further be formulated as
| (2) |
where H is the amount of time in the work cycle a hazard is present, and t is the percentage of time when the machine remains idle.
The other factors contributing to the assessment of the risk associated with hazard are as follows:
1. Alternative controls (AC):
• AC0 – there is no alternative control or action possible.
• AC1 – at least one or more alternative control or possible action present
2. Awareness of hazardous event (AW)
• AW3 – High: known before the hazard occurs
• AW2 – Medium: know during all the time of hazardous event
• AW1 – Low: known during the hazardous event, some of the time only
• AW0 – None: one cannot see or aware of the hazardous event
3. Ability to react (AR)
• AR 3 – The operator can avoid or minimise hazard by reacting as the operator already has hand or foot on control element
• AR 2 – The operator can react in time by moving hand or foot to control element
• AR 1 – The operator can react in time but an unnatural response, the operator has to engage other functions to avoid or mitigate the risk
• AR 0 – The operator is unable to avoid the hazard even if there is a system to respond with
4. Controllability (C)
• C0 – Highly controllable
• C1 – Medium controllable
• C2 – Low controllable
• C3 – Uncontrollable
The controllability can be classified based on the awareness and ability to react, as presented in Figure 4(a).
The combination of severity, exposure, and controllability can be used to determine the Machine Performance Level required (MPLr) as specified for SCS in ISO 19014-1.
The MPLr are categorised in a,b,c,d,e, where ‘a’ is minimum and ‘e’ is maximum MPLr for an SCS. Apart from them, there is also Quality Measure (QM) which requires only carrying out system development according to quality management tools. MPLr can be determined from Figure 4(b).
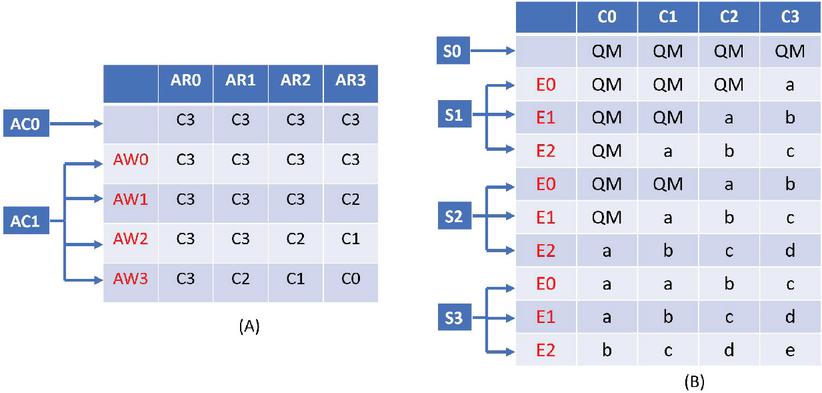
Figure 4 (a) Controllability classification and (b) MPLr based on S, E, and C [12].
The hydraulic system of the steering in itself should comply with ISO 4413 [20] and other relevant standards, for the safety of the individual components within the hydraulic system, that analysis is beyond the scope of this study. In steering of NRMM the following hazard scenarios have been identified.
• Hazard 1 (H1): Loss of steering power
• Hazard 2 (H2): Unintended vehicle steer
• Hazard 3 (H3): Opposite direction vehicle steer
• Hazard 4 (H4): Oversteer
• Hazard 5 (H5): Understeer
2.2 Off – Road Work Site Operation
For the hazard analysis of a wheel loader case a typical ‘Y’ loading work cycle as shown in Figure 5 is selected, as it represents the most commonly used for wheel loader case. Nevertheless, a wheel loader may have varying applications and work cycle as presented in [21]. The wheel loader starts from point C and travels to a pile of material at point A to fill the bucket, returns back to point C and travels to point B to unload the material in a dumper.
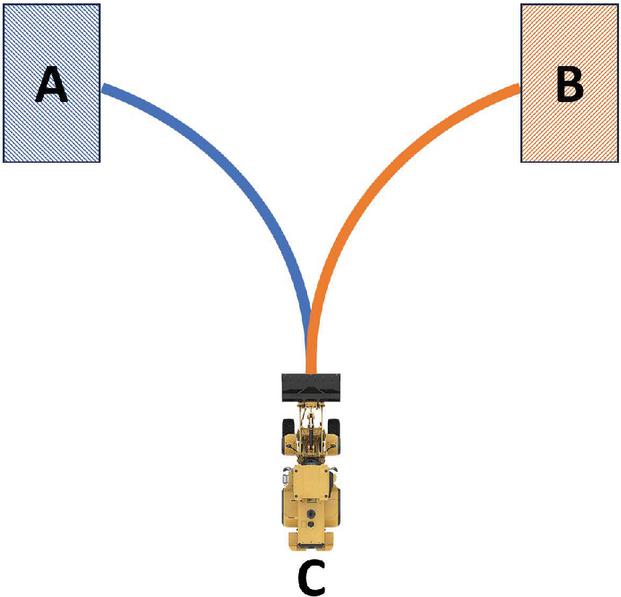
Figure 5 Wheel loader ‘Y’ work cycle.
The detailed analysis of the aforementioned hazards to determine the MPLr is as follows:
2.2.1 Hazard 1: Loss of steering power
Description: The hazard may occur because of any failure in the primary power supply of the steering unit it may be hydrostatic pump or prime mover of the pump, or a malfunction in the priority valve which leads to the flow not being directed to the main valve.
Hazardous outcome: The loader can loss control of steering and can run over bystander(s) and co-worker(s) at the work site. It can also collide with another machine, high wall, electric power, or obstacle nearby.
Severity: Operator loader and truck – S3, as the loader can run into a high wall resulting in fatality of operator.
Bystander(s)/co-workers at site – S3, run over and fatality.
Exposure: As described earlier E is a product of A, P, and H. These coefficients may vary widely depending on the application and location of work site. The numbers used in further analysis have been collected from ISO 19014-1 Annex C, which further refers to the data obtained from the application experts. Hence, In this case,
A is 90% considering the machine is working for 90% of the total time and idle only for the remaining 10%.
H for operator(s) is 2.5% as they will be exposed to hazard only when the machine collides with some solid object or one another, while for bystander(s)/co-worker(s) it is 5%, as their exposure to hazard is more than operator(s).
So, using (2) H is 2.25% while for bystander(s) and co-worker(s) it is 4.5%.
P for operator is 100% as operator is expected to be in the machine when it is in operation, while for bystander(s) and co-worker(s) it is 10%.
Using Equation (1) to calculate E for both groups, E:– 90% 2.25% 100% 2.025% the category is E1 E:– 90% 4.5% 10% 0.405% the category is E0
Controllability: AC1 – as operator can use muscle force to steer the vehicle to safety as the orbital valve will act as a pump, and also simultaneously can engage brakes to stop the loader before it causes any hazard. Hence alternative control element is available.
AW2 – operator can sense the loss of steering by muscle senses and experience and can give audible and visible warnings using honking and lights to alert the surrounding.
AR2 – operator can naturally react to mitigate the hazard as his/her hand and foot are already on control elements such as brake.
Using Figure 4(a), the controllability, in this case, is C2 for operator and Bystanders/co-workers.
Machine Performance Level required (MPLr) based on Figure 3(b). Operators (S3, E1, C2) – MPLr ‘c’ Bystanders/co-workers (S3, E0, C2) – MPLr is ‘b’
2.2.2 Hazard 2: Unintended vehicle steer/uncommanded activation
Description: The hazard may occur because of any malfunction in the valve or other part of the system which can cause the main valve to actuate without any command being given by the operator, and as a result vehicle being steered in any direction unintended.
Hazardous outcome: The loader can steer to any direction unexpectedly and can hit or run over bystander(s)/co-worker(s) on-site, and also can hit a wall, tree, or another machine.
The severity ‘S’, Exposure ‘E’, and ‘AC’ will be the same as in case of Hazard 1.
AR0 – Although there is alternative control element such as brake present, the operator may not be able to react on time is power is being delivered to the steering actuators suddenly without command. Also, bystander(s)/co-worker(s) may not be aware of unexpected steering activation.
AW2 – The unintended steering operation can be known during the time of hazard as the machine moves in direction it is not commanded to move.
Hence, the controllability is C3 in this case. MPLr for operator(s) (S3, E1, C3) – ‘d’ MPLr for bystander(s)/co-worker(s) (S3, E0, C3) – ‘c’
2.2.3 Hazard 3: Steer in the opposite direction as commanded
Description: The hazard may occur because of any malfunction in any control valve or other part of the system which can cause it to steer in the opposite direction as commanded by the operator.
Hazardous outcome: The loader can steer to the opposite direction as commanded, unexpectedly and can hit or run over bystander(s)/co-worker(s) on-site, and also can hit a wall, tree, or another machine.
All the parameters to determine controllability and MPLr will be the same as Hazard 2 in this case, hence controllability and MPLr will also be the same.
2.2.4 Hazard 4: Oversteer
Description: The hazard may occur because of any malfunction in any control valve or other part of the system which can cause it to steer more than intended by the operator. An oversteer may also occur because of inaccurate calibration of the valves, then the vehicle will steer more than commanded.
Hazardous outcome: The loader can steer more than desired by the operator and can hit or in the worst case even run over bystander(s) or co-worker(s) at site, and can collide with nearby walls or trees, or another machine.
All the parameters to determine controllability and MPLr will be the same as Hazard 2 and 3 in this case, hence controllability and MPLr will also be the same.
2.2.5 Hazard 5: Understeer
Description: The hazard may occur because of any malfunction in any control valve or other part of the system which can cause it to steer less than intended by the operator.
Hazardous outcome: The loader can hit or in the worst case can even run over the bystanders or co-workers or hit some object, mainly at some turn, as the operator will command to turn the vehicle whereas someone is standing on the corner or some object or another machine is there, but the vehicle will not turn sufficiently according to the operator’s command, resulting in a hazard.
This case corresponds to the Hazard 1, but wil lower degree of risk associated. The parameters to determine controllability and MPLr will be the same as Hazard 1 in this case, AW2 is here as the operator will know by experience in an early stage of the steering operation, that vehicle is not being steered as desired, hence controllability and MPLr will also be same as Hazard 1 case.
2.3 On – Road Travel
The machine such as a wheel loader although primarily used for the work function at a site, but it may also be needed to travel on road to transport the machine from one work site to the another. The maximum allowed speed of the machine may vary from country to country, and with machine capacity and type. However, the vehicles such as passenger cars, bikes, or motorcycles may travel in the same direction or opposite lane with different speeds on road with respect to the machine under consideration.
As we have seen in previous section that the most dangerous hazard scenario is for unintended/uncommanded steering, i.e., Hazard 2. Furthermore, ISO 19014-5 [22] recommends that in case of steering of machine like wheel loader while roading, all the failure types in steering will create the same hazard, the machine will leave the intended lane. It can be understood by the fact that the uncommanded steering on a straight road will cause the same hazard as failure to steer on demand (loss of steering power; Hazard 1) on a curved road.
Hence, only hazard 2, unintended/uncommanded steering case has been considered to determine the MPLr. Figure 6 shows a typical hazard zone in case of an unintended steering actuation. The normal practice on road is considered as the distance of two car lengths between consecutive cars [22], however it may vary greatly depending on location and type of road.
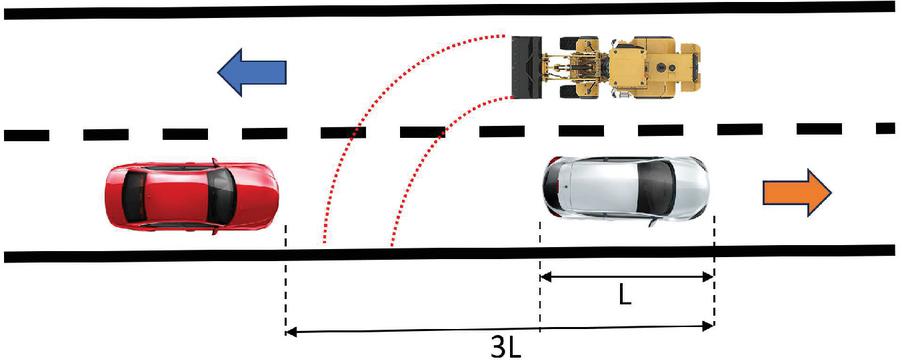
Figure 6 Steering hazard zone for on – road travel.
There may be different hazard scenarios for the same fault type of uncommanded actuation based on the respective locations of the passenger vehicle and wheel loader in question. The machine may collide to the side of the vehicle, or it may run in front of the vehicle, i.e., the vehicle drives straight into the side of the machine. Apart from the road traffic, there is an equal probability that the uncommanded steering will happen towards the other side of the road, hence the wheel loader running over pedestrian, bikes, or stationary objects. Depending on both the cases, different ‘P’ values have been estimated to calculate the overall ‘H’ and ‘P’ variables described in Equation (1).
To calculate the combined ‘P’ value for on – road case, the following formula is used [22].
| (3) |
Here, the subscript with ‘H’ and ‘P’ variables represent the relative value in Left (L) and Right (R) direction.
The case as shown in Figure 6 is when the road traffic is on Left side of wheel loader, however, the failure probability for steering to actuate on both sides is equal.
In the selected case, the ‘P’ variable ‘P’ of 10% is selected for right side of the road, where there is a risk of collision with pedestrian, bikes, or other stationary objects.
To calculate P, the following relation is used [22]
| (4) |
Here, T is Traffic rate, L is one car length, and W is car width.
T = 1/3; as explained earlier in is section [22]
L 1, equivalent to one car length, Figure 6.
W L/3.5, although the ratio of vehicles on road may vary, the standard average estimate has been used [22].
Using the values in Equations (3) and (4), the equivalent ‘P’ value is 15.7%.
The H according to Equation (2) will remain 100% in this case, as while travelling on road, operator is always in the machine and machine is in motion, also, there is always one person driving other vehicle in collision. Note that the ‘P’ variable in Equation (3) have already taken into account the different sides and possibilities of collision in the person group exposure.
The ‘A’ variable for this case does not have a fixed number, it can vary anywhere from 20% – 40% depending on the wheel loader application [22], here we will use an average of 30%.
Using Equation (1),
Hence the exposure according to Table 3, is ‘E1’ for both person groups.
The severity of harm in this case is ‘S3’ in this case, as the collision of wheel loader in such scenario with anything may result in fatality of the person on road vehicle/bystander, or the operator as well.
AC1 – as there are available control means such as brakes.
AW2 – operator and other road users will know and see the machine being steered.
AR0 – although the operator and other road users can be aware of the machine being steered and there is alternative control available, they may not have enough time to react on the road to avoid the hazard.
Using Figure 4(a) the controllability is C3.
MPLr as presented in Figure 4(a) for (S3, E1, C3) – ‘d’
The hazard analysis for both use cases shows that for existing steering in articulated wheel loaders, the MPLr even for the worst-case scenario is ‘d’ which is at the higher end on a scale of ‘a’ to ‘e’. Hence, any new system replacing the existing steering must have at least the same level of performance.
3 Functional Safety
As the MPLr is determined in preceding section, it becomes necessary to investigate means to achieve that Performance Level (MPLa), and one of the methods is functional safety analysis. The functional safety according to IEC 61508 – 4 [23] and [12] can be defined as, the part of safety that relies on the correct functioning of safety control systems (SCS) and other risk reduction measures, with the goal of preventing or limiting harm to people and damage to the machine or work environment. The guidelines and principles to design and integrate the Safety-Related Parts of Control System (SRP/CS) are provided in ISO 13849 – 1 [24], where SRP/CS is also defined as part of a control system that responds to safety-related input signals and generates safety-related output signals regardless of technology and energy used. Whereas the guidelines and design recommendations to achieve a desired machine performance level for overall steering architecture are provided in ISO 13849 – 1, the SbW principle inherently uses ECU which need to have a specific Safety Integrity Level (SIL) as described in IEC 61508 – 0 [25] along with the levels in [23].
3.1 Machine Performance Level
To achieve the MPL of ‘d’ as is required according to the analysis in previous section, the design recommendations of ISO 13849 – 1 shall be followed for system architecture. There are five designated architectures defined in the said standard, the basic one is designated as ‘B’ and then from ‘1’ to ‘4’. To achieve the performance level of ‘d’ the minimum designated architecture is ‘3’, which can be defined as the design where a single fault in any of the parts does not lead to the loss of the safety function. Whenever reasonably practicable, the single fault shall be detected at or before the next demand upon the safety function. The architecture is shown in Figure 7, here I1, I2 are input devices, L1, L2 are logic units, and O1, O2 are output devices, i is interconnecting means, ‘m’ represents monitoring while ‘c’ is for cross monitoring.
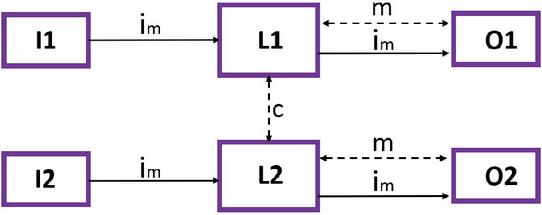
Figure 7 Designated architecture for category 3.
The recommended architecture requires that there shall be two parallel channels of input, logic, and output units with constant monitoring and cross monitoring. Apart from the system architecture, the individual components, channels, and monitoring must fulfil the basic requirements. The individual components and channels shall have the minimum required Mean Time to Dangerous Failure (MTTF), and the monitoring shall be according to the requirements of Diagnostic Coverage (DC). The detailed investigation of the functional safety has been conducted by authors in [26].
3.2 Safety Integrity Level
The safety integrity level (SIL) can be defined as a relative level of risk reduction provided by a safety function, or to the probability of a safety function satisfactorily performing its intended task under specific conditions. Moreover, SIL is used to achieve a desired functional safety level where electric/electronic/programable electronic is used in an SRP/CS. There are four SIL specified in [25] from SIL 1 to SIL 4, where SIL 1 corresponds to lowest level of safety integrity and SIL 4 is for highest level of safety integrity. The different levels targets failure measures for a safety function, in case of steering which is a continuous mode operation, IEC 61508 – 1 [27] provides the relation between SIL and average frequency of a dangerous failure of the safety function [h] (PFH) as shown in Table 3.
Table 3 Safety integrity levels and target failure measures for a safety function
| Safety Integrity | Average Frequency of a Dangerous Failure |
| Level (SIL) | of the Safety Function [h] (PFH) |
| 4 | to |
| 3 | to |
| 2 | to |
| 1 | to |
As there is no such thig as zero risk, the goal of the SIL and MPL shall be to reduce the risk to the minimum acceptable level. Furthermore, ISO 13849 – 1 provides relation between the MPL and SIL for high demand or continuous mode of operation. To achieve a MPL of ‘d’, as is required for the selected case, a minimum of SIL 2 is recommended, which corresponds to an average frequency of a dangerous failure from to .
4 Proposed Electro-hydrostatic Steering
Analysing the requirements and recommendations accessed in preceding sections for a safe and redundant steering system for NRMM, an electro-hydrostatic actuator based steering system is proposed in this section. The primary schematic of the proposed system is shown in Figure 8. The proposed system is steer-by-wire, eliminating the mechanical linkage between the steering wheel and the hydraulic system that controls the steering actuators. It relies on redundant components, sensors, and controllers, the design of the ECU and individual components shall follow the recommendations described in previous section along with other relevant standards. The steering also has a redundant or secondary steering which is also controlled electrically but has a separate power source.
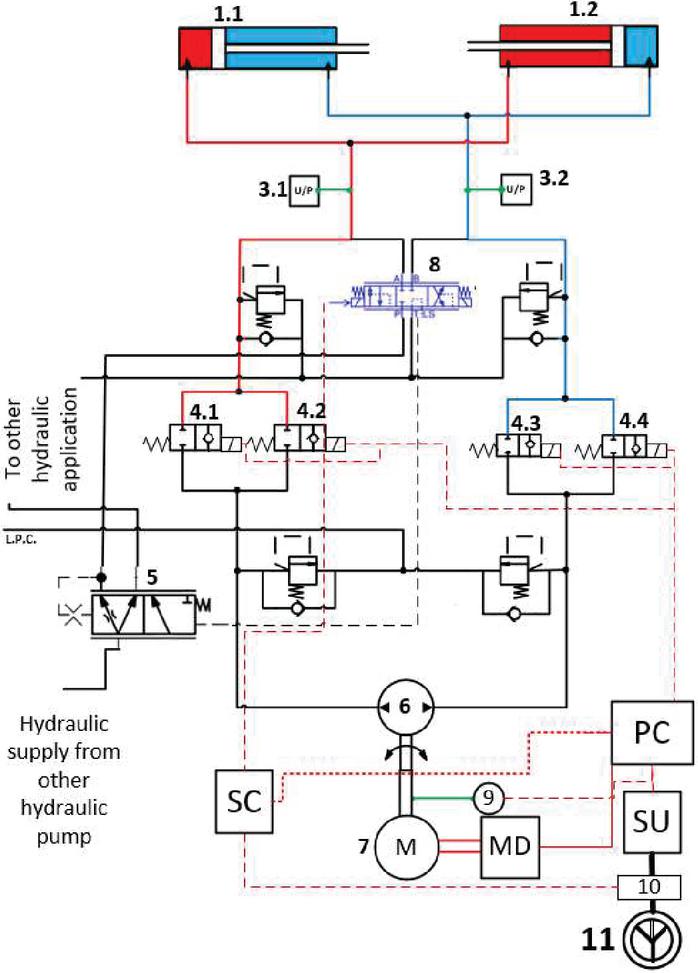
Figure 8 Proposed electro-hydrostatic articulated steering.
To understand the basic components of the steering, the steering actuators (1.1) and (1.2) are powered by a fixed displacement hydrostatic pump (6) rotated by a variable speed electric motor (7) as shown in Figure 8. The locking valves (4.1) through (4.4) are normally closed, which are activated when a steering command is given, to allow flow in only one direction, making sure any malfunction in the controller or valve should not result in unintended or opposite steering as deemed hazardous in the preceding section. In case no steering command is given, these valves will hold the steering in its position without providing any additional command or power input.
When a steering command is given by steering wheel (11), the Steering Unit (SU) will send the input signals to the Primary Controller (PC). The SU shall be embedded with rotational speed, torque, and angle sensors, as well as steering torque elements, according to industry standards. The primary controller also receives signals from displacement transducers (2), pressure transducers (3), and angular velocity transducer (9) in order to control the Motor Drive (MD) and locking valves (4), which in turn controls the electric motor and flow respectively, hence the hydrostatic pump and steering subsequently. If a steering command for rightward steering is given, the hydrostatic pump will circulate the fluid in the clockwise direction, and valves (4.1) and (4.3) will be activated by the controller allowing fluid flow only in the desired direction. On the other hand, in the case of a leftward steer, the fluid circulation will be anticlockwise and valves (4.2) and (4.4) will be activated. It will also make sure that the steering action is in line with the given command preventing opposite-direction steering, as valves (4.1–4.4) only allow flow in one direction using check valves. In case of any failure resulting in the vehicle not being steered in accordance with the steering command, the PC will send a signal to the Secondary Controller (SC) to be activated. The SC can also independently determine the failure by accessing information from PC and steering sensor (10), which can be added for enhanced redundancy. The secondary controller will control the proportional steering valve with load sensing port (8), which will get hydraulic power from a separate hydrostatic pump through priority valve (5). The steering valve presented in Figure 8 is symbolic, there shall be a much more complex and safe steering valve, controlled by an electric signal. The priority valve will send fluid to a machine function with lower safety priority in normal conditions, and whenever the SC will be activated, the priority valve will direct the flow to the steering.
Hydraulic pressure relief valves with anti-cavitation functionality are provided for additional safety of the hydraulic circuit in case of excessive pressure. The pressure relief valves are provided on both sides of the locking valves (4.1-4-4), to prevent excess pressure in both steering controls and also in the locked position. Low pressure circuit (L.P.C.) of the existing hydraulic architecture is connected to maintain a minimum pressure in low pressure side of the steering and also to compensate for the leakage losses.
It is worth nothing that the schematic presented in Figure 8 and described in this section, is basic with only necessary components to describe the intended functionality. Additionally, the similar functionality can be achieved by some different schematic, however the working principle can remain same. Furthermore, the control and communication redundancy shall be maintained Section 3 and in accordance with other relevant standards.
The proposed electro-hydrostatic steering has the potential to fulfil the requirements of the relevant standards as well as consider the safety of the machine as described in the preceding sections of this study. The losses in conventional hydrostatic steering occurring at the proportional valve and orbital valve are being avoided. The steering ideally acts as a symmetric electro-hydrostatic unit which has been proven to be energy efficient over any conventional hydraulic system [28]. Also, when other working functions of the machine are not being used, the proposed steering avoids the parasitic losses of the primary power unit, which is usually a diesel engine. The proposed steering can also be useful in autonomous NRMM or any articulated vehicle, as it can be controlled electrically with high redundancy and reliability. The individual components, sensors, and controllers of the proposed system shall strictly fulfil the relevant standards.

Figure 9 Wheel loader in Mevea environment.
5 Energy Saving Potential of Proposed Electro-hydrostatic Steering
As described in the previous section, the proposed EHA-based steering fulfils the safety standard requirements, however, to make a big change in the system, it must be worth it in terms of efficiency and energy savings. Hence, the proposed electro-hydrostatic steering is compared with a semi-conventional steering unit from energy saving point of view. A wheel loader model shown in Figure 9 is used for study in Mevea virtual environment. Mevea is a digital twin technology and simulation platform for smart ports, construction industry, and mining. Its own physics engine simulates the mechanics, hydraulics, power transmission, and operating environment of the machine [17]. Mevea use physic-based modelling with taking the reference of the commercially available components [33, 34]. The steering system of this model is considered as the baseline for comparison with proposed EHA-based steering. The values of steering actuator position, steering command, and force on the steering actuators are recorded. In absence of the experimental data from real machine, this sufficiently represents the real behaviour of machine in terms of the said parameters for further investigation. The machine was operated in a standard ‘Y’ loading cycle, similar to the one considered for first part of hazard analysis.
The wheel loader is of 16-ton capacity and has a diesel engine with a maximum power of 66 kW. The hydraulics of the wheel loader consists of two variable displacement load-sensing pumps which are of 63 cc/rev and 34 cc/rev in size, the bigger pump is dedicated to only working hydraulics, while the smaller pump supplies fluid to steering as a priority whenever needed, otherwise also contributes to the working hydraulics. The hydraulic schematics of the wheel loader is shown in Figure 10. The steering in red boundary consists of a priority valve and a digitally controlled proportional valve for steering control. In conventional hydrostatic steering units, the control valve is operated manually by mechanical connection as shown in Figure 1(b). In absence of experimental steering data of conventional steering valve, a semi-conventional valve is chosen which is controlled by electrical signal.
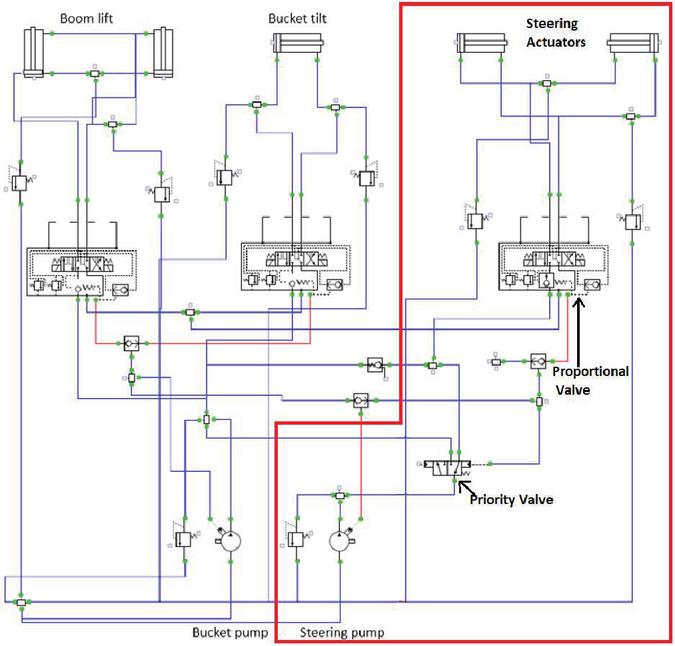
Figure 10 Hydraulic schematic of wheel loader with steering in red boundary.
The steering pump here is also controlled electrically and the flow is also used in working hydraulics, hence the flow and pressure at the inlet of the steering proportional valve are considered for the comparison of the energy consumption. However, this is usually not the case in most of the articulated steered NRMM where the hydrostatic pump is driven directly by an Internal Combustion engine in most of the cases, and irrespective of its use it keeps running all the time.
The energy consumption for this is calculated as follows.
| (5) |
Here Q and p are flow and pressure at the pressure port of the proportional steering control valve. It should be kept in mind that the hydrostatic pump is electrically controlled, hence it is shut off when not in use by either of the application, the working hydraulics or the steering. In this way, the parasitic losses of the engine, which are inevitably present in the conventional machine are avoided already in the baseline model. Also, the losses in the pump and priority valve, which contribute to nearly 37% of the total hydraulic losses in conventional hydrostatic steering [9] are not considered here for comparison with proposed electro-hydrostatic steering.
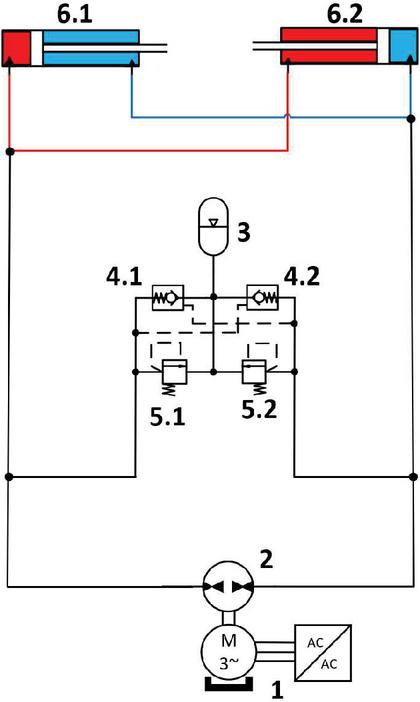
Figure 11 Electro-hydrostatic steering considered for energy efficiency analysis.
The proposed electro-hydrostatic steering with a simplified schematic is modelled in MATLAB/Simulink environment for calculation of the energy consumption. Figure 11 shows the schematics of the electric motor-controlled single pump electro-hydrostatic actuator steering configuration with pilot check valves. The basic working principle of the same can be understood briefly as follows; the Hydrostatic pump (2) driven and controlled by electric motor and drive (1), acts as the hydraulic power source. The hydraulic accumulator (3) through pilot check valves (4.1,4.2) supplies fluid to compensate for any leakages. The pilot check valves connect the low-pressure side of the circuit to accumulator, this also ensures the minimum pressure in low pressure side of the hydraulic circuit during assistive load operation cycle. The passive hydraulic safety is ensured by the two pressure relief valves.
Table 4 Electro-hydrostatic steering simulation parameters
| Component | Parameters |
| Steering Actuators | 80/50 mm; stroke – 340 mm |
| Hydrostatic Pump | Displacement – 11cc/rev; max speed 3000 rpm |
| Accumulator | Volume – 2L; pre-charge pressure – 2bar; initial pressure at start of cycle – 12 bar |
| Pilot Check Valves | Pilot ratio – 3; cracking pressure – 0.5 bar |
| Electric Motor | Rated power – 2.54kW; rated speed – 3000 rpm; rated torque – 8.1 Nm; efficiency – 0.85; power factor – 0.92; Drive VPWM – 380/480 [V AC] |
The main losses in EHA are from electric motor and hydrostatic pump, the other parts like check-valves and hydraulic lines contribute minorly to the losses. The hydraulics part is modelled in a similar way as described in [28] and [29], The Schlösser mathematical loss coefficient model [30] is used for hydrostatic pump as represented by Equations (6) and (7), where the flow and torque losses are calculated respectively.
| (6) | ||
| (7) |
In Equation (6) is the output flow of the pump, V is volumetric displacement, is pressure difference across pump ports, N is rotational speed of pump, and are dynamic viscosity on laminar flow and turbulent flow with value of 1.9e-8 and 4.8e-8 respectively. Whereas, in Equation (7) T is pump torque and coefficients C, C, and C are coulombic, viscous, and hydrodynamic friction loss coefficients with values 0.1, 1.3e4, and 550, respectively.
The power consumption of electric motor is calculated using Equation (8) and parameters are provided in Table 4. The electric motor model has been validated experimentally in past, and its control considered for the simulation is described in [31]. The similar control strategy of the same electric motor with electro-hydrostatic actuator has also been studied for the application case of steering in [32]. The size of steering actuators is used same as in baseline model.
| (8) |
In Equation (8) P is the electric power consumption of electric motor, i is maximum of 3-phase current, V is drive AC voltage, is efficiency, and is power factor.
The forces on the steering actuators individually are calculated by the data obtained from the Mevea model of each actuator as follows.
| (9) |
In Equation (9), and A are the pressure and area of the piston side of the actuator respectively, while and A are from the rod side of the individual actuator.
The forces on both actuators are used for simulation purposes in newly proposed steering in Simulink as calculated in Equation (9), while the drive speed of the electric motor is tuned manually taking the reference of the position and speed of the steering actuators which further was obtained from Mevea model. The electric motor was turned off when no steering command is given, based on the steering valve signal. Figure 12 shows the electric motor speed in Revolutions per Minute (RPM) to obtain the desired steering output according to command.
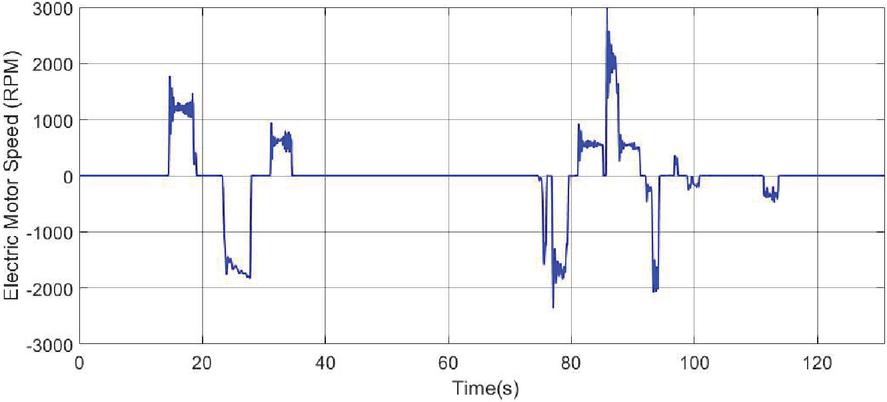
Figure 12 Electric motor speed.
The same steering command reference is used for electro-hydrostatic steering to get the same steering actuator output as shown in Figures 13 and 14. Figure 13 shows the position of the steering actuators in the baseline model and electro-hydrostatic simulation model. The displacement of both of the steering actuators, when the steering command is given, is equal in magnitude and opposite in direction.
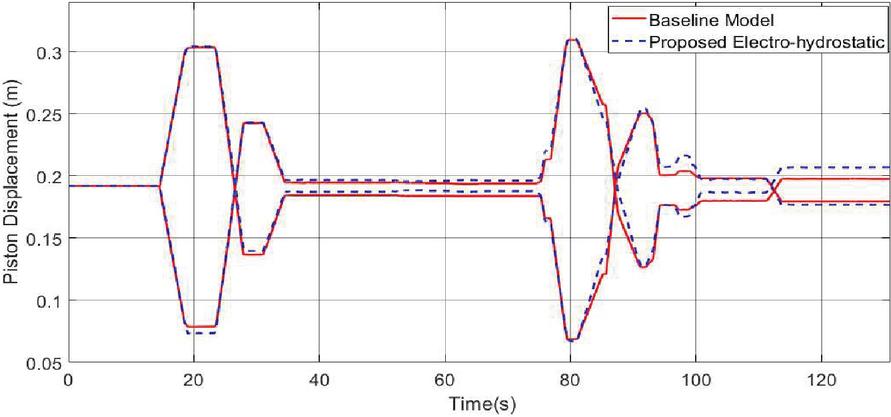
Figure 13 Displacement of steering actuators.
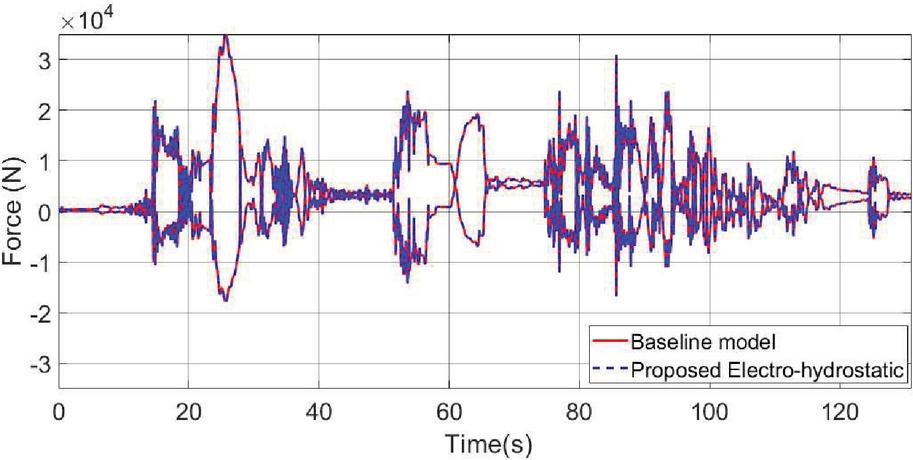
Figure 14 Force on steering actuators.
The MATLAB/Simulink simulation model of electro-hydrostatic steering follows the steering command well with minor offset, which authors believe do not have much effect on the energy consumption and can be improved in future with better control, which is out of scope of this study. Figure 14 presents the force on the steering actuators while the corresponding pressure in both sides of the steering actuator is presented in Figure 15.
The power of the electric motor in electro-hydrostatic steering calculated with the parameters provided in Table 4, is shown in Figure 16. The electric motor power remains well in its rated power limit, while the motor is turned off when no steering command is given. The electric motor as the primary power source, consumed power shown in Figure 16, with a mean value of 152 W for the entire working cycle.
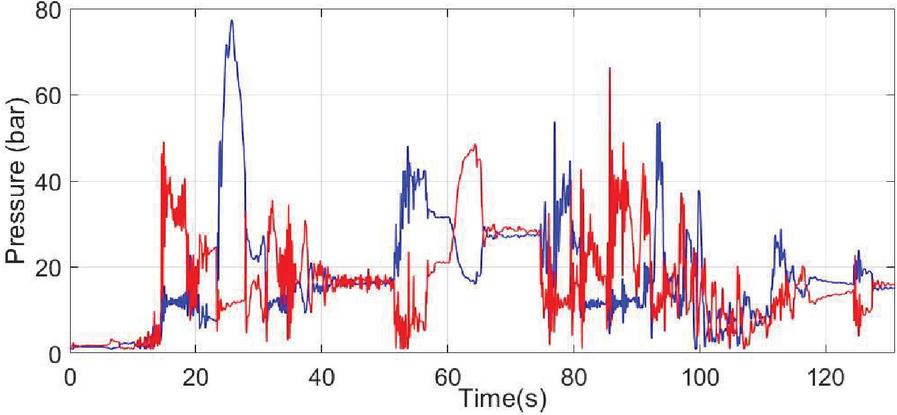
Figure 15 Pressure in steering actuator chambers.
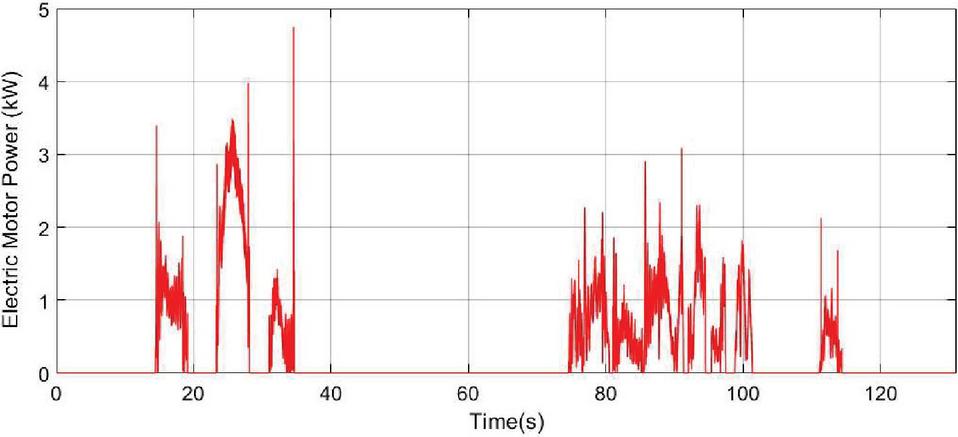
Figure 16 Power of electric motor in electro-hydrostatic steering.
The power of the electric motor is compared with hydraulic power delivered to the steering valve as formulated in Equation (5) and described earlier. The mean power delivered to the proportional steering valve in baseline model is 216 W for the time when a steering command is given, during the entire work cycle. As in absence of a steering command, the flow is directed to the working hydraulics and when the flow is not required at either of the application, the steering pump is turned off in baseline model. The hydrostatic pump, the electric motor used for the hydrostatic pump, and primary power source which is a diesel engine are not considered for energy consumption analysis in baseline model.
The losses occurring at different components have not been analysed independently, as we have the final power required to perform the steering operation. The comparison of hydrostatic pump losses can also be irrelevant keeping in mind the fact that in Mevea the pump used is 34 cc/rev, while in electro-hydrostatic steering 11 cc/rev pump is sufficient. Figure 17 demonstrates the energy consumption and loss for both steering to perform a similar work cycle.
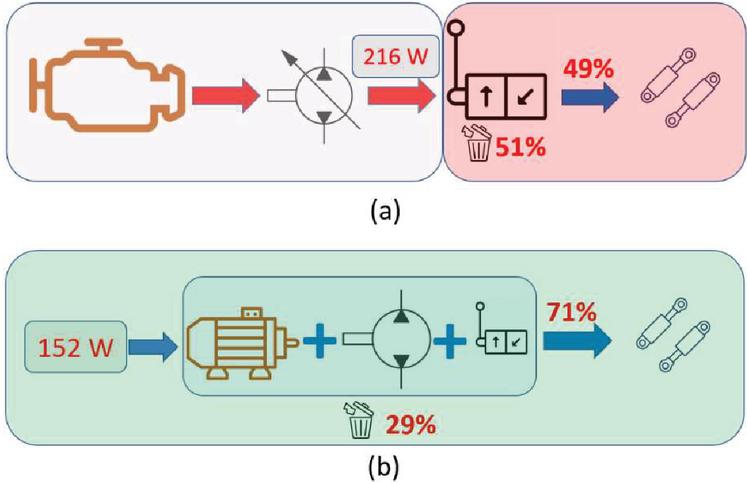
Figure 17 Energy consumption and loss in (A) baseline conventional steering (B) electro-hydrostatic steering.
In case of electro-hydrostatic steering, the system is simplified and there are no locking valves used only pressure relief valves are considered for safety. However, in the system proposed in the previous section, there will be locking valves which cause some additional energy losses in the real system. The simulated system is simplified for primary energy consumption, not control and other functions of the proposed system. The main source of energy loss in the proposed system are the electric motor and hydrostatic pump.
6 Conclusion
In this study, the articulated steering of a wheel loader has been analysed to propose a new electro-hydrostatic steering solution for articulated vehicles which complies with relevant safety standards to minimize the risk of potential hazards. A detailed hazard analysis of the steering of a wheel loader has been carried out as per ISO recommendations. Steering is a safety control element, so the functional safety and safety integrity level requirements to achieve the performance level required are also accessed. Based on the requirements and potential hazards, electro-hydrostatic steering is proposed with detailed schematics. The proposed system fulfils all the relevant requirements in corresponding safety standards and has the potential to mitigate the hazards. Further, the energy-saving potential of the electro-hydrostatic steering has been investigated by comparing the energy consumption of the steering valve of a wheel loader in Mevea environment. It has been found that to perform steering in a similar work cycle, the mean power consumed by the primary power source i.e., the electric motor in electro-hydrostatic steering is less than the energy consumed by the steering valve in conventional steering. It has been found that in conventional steering, 51% of energy is wasted in the steering valve alone, while in EHA-based steering only 29% is wasted in the entire steering operation. The simulated electro-hydrostatic steering is simplified for energy analysis, but in the future, the detailed performance of the proposed steering system will be studied.
Acknowledgement
This research is a part of Business Finland project EM/MA-2 and supported by Finnish Foundation for Technology Promotion (Tekniikan Edistämissäätiö) grant no. 8917.
Nomenclature
| Acronym | Description |
| SbW | Steer-by-Wire |
| NRMM | Non-Road Mobile Machinery |
| IC | Internal Combustion |
| ISO | International Organization for Standardization |
| SCS | Safety Control System |
| MPL | Machine Performance Level |
| MPLr | Machine Performance Level required |
| MPLa | Machine Performance Level achieved |
| ECU | Electronic Control Unit |
| SIL | Safety Integrity Level |
| IEC | International Electrotechnical Commission |
| ASIL | Automotive Safety Integrity Level |
| MCSSA | Machine Control System Safety Analysis |
| SRP/CS | Safety-Related Parts of Control |
| MTTFD | Mean Time to Dangerous Failure |
| DC | Diagnostic Coverage |
| EHA | Electro-hydrostatic actuator |
References
[1] Singh, V. P., Huova, M., and Minav, T. (2023). Energy Efficient Steer-By-Wire in articulated non-road mobile machines: Analysis and proposal. In Proceedings of the 18th Scandinavian International Conference on Fluid Power, SICFP (Vol. 23, pp. 1–15).
[2] European Commission. (2021). European Green Deal: Commission proposes transformation of EU economy and society to meet climate ambitions. Eur. Comm.
[3] Lajunen, A., Suomela, J., Pippuri, J., Tammi, K., Lehmuspelto, T., and Sainio, P. (2016). Electric and hybrid electric non-road mobile machinery–present situation and future trends. World Electric Vehicle Journal, 8(1), 172–183.
[4] Un-Noor, F., Wu, G., Perugu, H., Collier, S., Yoon, S., Barth, M., and Boriboonsomsin, K. (2022). Off-Road Construction and Agricultural Equipment Electrification: Review, Challenges, and Opportunities. Vehicles, 4(3), 780–807.
[5] Pettersson, K., Heybroek, K., Mattsson, P., and Krus, P. (2017). A novel hydromechanical hybrid motion system for construction machines. International Journal of Fluid Power, 18(1), 17–28.
[6] Altare, G., and Vacca, A. (2015). A design solution for efficient and compact electro-hydraulic actuators. Procedia Engineering, 106, 8–16.
[7] Qu, S., Fassbender, D., Vacca, A., and Busquets, E. (2021). A cost-effective electro-hydraulic actuator solution with open circuit architecture. International Journal of Fluid Power, 22(2), 233–258.
[8] Zhao, H., Wang, B., Zhang, G., and Feng, Y. (2019). Energy saving design and control of steering wheel system of steering by wire vehicle. IEEE Access, 7, 44307–44316.
[9] Daher, N., and Ivantysynova, M. (2014). Energy analysis of an original steering technology that saves fuel and boosts efficiency. Energy conversion and management, 86, 1059–1068.
[10] Rowduru, S., Kumar, N., and Partap Singh, V. (2022). Determination of Steering Actuator Mounting Points of a Load Haul Dump Machine for Optimum Performance. In Machines, Mechanism and Robotics (pp. 711–723). Springer, Singapore.
[11] Danfoss. [Technical Information; General, Steering Components] BC00000096en-000501. [December 2019]. Danfoss. General, Steering Components (danfoss.com)
[12] SFS-EN ISO 19014-1:2018:en (2018) Earth-moving machinery. Functional safety. Part 1: Methodology to determine safety-related parts of the control system and performance requirements. International Organization for Standardization.
[13] SFS-EN ISO 5010:en (2019) Earth-moving machinery. Wheeled machines. Steering requirements. International Organization for Standardization.
[14] Daher, N., Wang, C., and Ivantysynova, M. (2013, September). Novel energy-saving steer-by-wire system for articulated steering vehicles: A compact wheel loader case study. In 13th Scandinavian International Conference on Fluid Power; June 3–5; 2013; Linköping; Sweden (No. 92, pp. 541–552). Linköping University Electronic Press.
[15] Wang, X., Yang, J., Quan, L., Zhang, X., and Wang, J. (2018). A novel high-efficiency wheel loader power steering system with fault-tolerant capability. IEEE Transactions on Vehicular Technology, 67(10), 9273–9283.
[16] Wang, Y., Liu, X., Chen, J., Chen, W., Li, C., and Huo, D. (2022). Design and control performance optimization of dual-mode hydraulic steering system for wheel loader. Automation in Construction, 143, 104539.
[17] Mevea Ltd. (2022, August 4). Mevea Real-Time Simulation Software | Digital Twins Techology. Mevea. https://mevea.com/solutions/software/.
[18] SFS-EN ISO 12100:en (2010) Safety of machinery. General principles for design. Risk assessment and risk reduction. International Organization for Standardization.
[19] SFS-EN ISO 26262-1:en (2019) Road vehicles. Functional safety. Part 1: Vocabulary. International Organization for Standardization.
[20] SFS-EN ISO 4413:en (2010) Hydraulic fluid power – General rules and safety requirements for systems and their components. International Organization for Standardization.
[21] Karlsson J. Analyzes of a wheel loader usage. In: Materials Proceedings today; (2010). p. 26 [Online]. Available: https://mdh.diva-portal.org/smash/record.jsf?pid%C2%BCdiva2%3A378714=&dswid=4871.
[22] SFS-EN ISO 19014-5:2021:en (2021) Earth-moving machinery. Functional safety. Part 5: Tables of performance levels. International Organization for Standardization.
[23] SFS-EN IEC 61508-4. (2010). Functional safety of electrical/electronic/ programmable electronic safety-related systems – Part 4: Definitions and abbreviations. International Electrotechnical Commission.
[24] SFS-EN ISO 13849-1. (2015). Safety of machinery – Safety-related parts of control systems – Part 1: General principles for design. International Organization for Standardization.
[25] SFS-EN IEC/TR 61508-0. (2010). Functional safety of electrical/electronic/programmable electronic safety-related systems – Part 0: Functional safety and IEC 61508. International Electrotechnical Commission.
[26] Singh, V. P., Huova, M., and Minav, T. (2023, October). Simulation Study of a Fail-Safe Steer-by-Wire for Heavy Earth Moving Machinery. In Fluid Power Systems Technology (Vol. 87431, p. V001T01A073). American Society of Mechanical Engineers.
[27] SFS-EN IEC/TR 61508-1. (2010). Functional safety of electrical/electronic/programmable electronic safety-related systems – Part 1: General requirements. International Electrotechnical Commission.
[28] Minav, T. A., Laurila, L. I., and Pyrhönen, J. J. (2013). Analysis of electro-hydraulic lifting system’s energy efficiency with direct electric drive pump control. Automation in construction, 30, 144–150.
[29] Singh, V. P., Pandey, A. K., and Dasgupta, K. (2021). Steady-state performance investigation of closed-circuit hydrostatic drive using variable displacement pump and variable displacement motor. Proceedings of the Institution of Mechanical Engineers, Part E: Journal of Process Mechanical Engineering, 235(2), 249–258.
[30] Schlosser, W. M. J. (1961). Mathematical model for displacement pumps and motors. Hydraulic power transmission, 7, 252–328.
[31] Zakharov, V., and Minav, T. (2020). Analysis of field oriented control of permanent magnet synchronous motor for a valveless pump-controlled actuator. Multidisciplinary Digital Publishing Institute Proceedings, 64(1), 19.
[32] Zakharov, V., and Minav, T. (2023). Analysis of Frequency adjustable control of Permanent Magnet Synchronous Motor for pump-controlled actuators. International Journal of Fluid Power, 125–140.
[33] Kotta, Jomi. “Modeling of Patu-655 loader with a combination of Mevea and Simulink using Functional Mock-up Interface.” (2021).
[34] Nikitina, Anna. “Flexible body tutorial for Mevea real-time simulation software.” (2018).
Biographies

Vinay Partap Singh received the masters’s degree in Mining Machinery Engineering from Indian Institute of Technology Dhanbad, India in 2019. Currently he is a Doctoral Researcher at Innovative Hydraulics and Automation – IHA, Tampere University, Finland. His research interest includes fluid power systems, electro-hydraulic actuators, heavy duty off-road mobile machines, and safety of the novel system in mobile machines.

Mikko Huova received the doctoral degree at Tampere University of Technology, Finland, in 2015. Currently he is Senior Research Fellow at IHA lab of Tampere University, Finland. He has over 12 years of expertise on advanced control, multi-pressure systems, and energy efficient digital hydraulic systems of heavy-duty mobile machines.

Tatiana Minav is Associate Professor at IHA lab of Tampere University. She has over 15 years of expertise on system electrification of off-road machinery and electro-hydraulic actuators solutions.
International Journal of Fluid Power, Vol. 25_3, 291–324.
doi: 10.13052/ijfp1439-9776.2531
© 2024 River Publishers