Economic Fault Detection for Axial Piston Pumps Under Variable Operating Conditions
Svenja Horn*, Simon Knoll, Ahmed Shorbagy, Michael Lenz and Jürgen Weber
Institute of Mechatronic Engineering, Technische Universität Dresden, Germany
E-mail: svenja.horn@tu-dresden.de; fluidtronik@mailbox.tu-dresden.de
*Corresponding Author
Received 13 December 2024; Accepted 11 April 2025
This paper presents a method for an economic condition monitoring implementation on axial piston pumps. The vision is to use only one “low-budget” sensor that records as much information as possible. It shows the detection of three typical faults – valve plate cavitation, slipper wear and axial slipper-piston clearance. A variety of sensors were used to collect data on efficiencies, flow rates, temperatures, and accelerations of the new and the faulty pump for 100 different operating conditions. Using a representative set of operating conditions with different speed, pressure and swash plate angle, the faults were predicted for two different machine learning algorithms for different sensors. The triaxial acceleration sensor achieves the best accuracy of 100% with a sampling rate of 16.4 kHz. To further reduce costs, the sampling rate is virtually downsampled until 4.1 kHz, resulting in a drop to 91% prediction accuracy. Moreover, the prediction accuracy for different sets of operating conditions with constant speed, pressure and swash plate angle are compared to each other showing best results for remaining the speed constant.
This paper shows, that it is possible to achieve accuracies over 98% on fault detection with only using the y-component of an acceleration sensor with a sampling rate of 4.1 kHz.
Keywords: Economic fault detection, condition monitoring, machine learning, predictive maintenance, transferability, remaining lifetime.
The ability to record large amounts of operating data with minimal effort and process it with intelligent algorithms opens up new ways for fluid technology, enhancing our understanding of component and system processes. This leads to a sustainable increase in the quality of future engineering and maintenance strategies. Current preventive maintenance guidelines prescribe the replacement of components at regular intervals or based on experience-driven decisions to prevent spontaneous failures. The latter approach utilizes highly specific threshold values, which require extensive long-term experience. While both improve failure safety, they cause high costs for the manufacturing, replacement and disposal of components, as these parts often need to be replaced long before reaching their actual service life and are often designed to be oversized. Furthermore, spontaneous failures are still possible which can cost up to several hundred dollars per minute.
Predictive maintenance (PM) concepts aim to eliminate these disadvantages and enable needs-based, optimal maintenance. This requires knowledge of the current and past status of each component in the system, also known as condition monitoring (CM), and relating this to process and machine data. Classic CM evaluates the wear tendencies to predict when technical usability is no longer guaranteed. Additionally, correlating wear with load history will allow, for the first time, causal statements about the reason for failure and the predictions of the remaining life.
This investigation concentrates on the fault prediction on axial piston pumps. These can be installed in many large industrial plants such as steel mills, where they are sometimes difficult to access, making maintenance work more complicated. Often little or no information is known about the current operating condition of the pump and the integration of additional sensors into existing software structures is complicated and cost-intensive. Although there is great interest in damage prediction in many areas of application, the price is one of the decisive factors for its use. These framework conditions point to a retrofit solution in the form of a sensor box connected to a cloud. With the goal of an economic sensor configuration, the number of sensors as well as the price per sensor must be minimized. Ideally, only one low-cost sensor is capable to survey the pump’s condition and predict the remaining life.
This paper presents one milestone towards this vision, starting with an overview of the existing work in the field of fault detection for Axial Piston Units (APU). Chapter three introduces the artificially generated faults, the installed sensors, the measurement procedure and machine learning (ML) methods. In chapter four, the results of the ML algorithms are presented including the accuracies for different sensors and their sampling rate reduction as well as the influence of different operating condition (OC) sets.
The VDI norm 2888 classifies CM methods into functional, knowledge-based and model-based approaches. The model-based approach is primarily used for system analyses, such as in investigations on valve-controlled drives, e.g. by using parity equations or parameter estimates. For displacement units, the functional approach can be suitable, as it is based on the periodic signals of rotary machines and is already used as standard in the monitoring of rolling bearings, e.g., in wind turbines. The aim of this work is to use only one sensor that should simultaneously contain as much information as possible about the status of the pump and the current operating condition. High-frequency sensors are ideal for this, but due to the large number and complexity of the data, they are most effectively analyzed using ML algorithms. The knowledge-based approach mainly uses pattern recognition methods and processes input and output data with a learning algorithm without information about internal system correlations. Pure knowledge-based methods use vast amounts of field data to draw conclusions about the use and wear of a machine. The knowledge gained usually remains within the company and is not published.
While the knowledge-based approach may provide general and imprecise estimates, robust and transferable algorithms can cope with the high variety of system and environmental influences, as demonstrated in the works of.
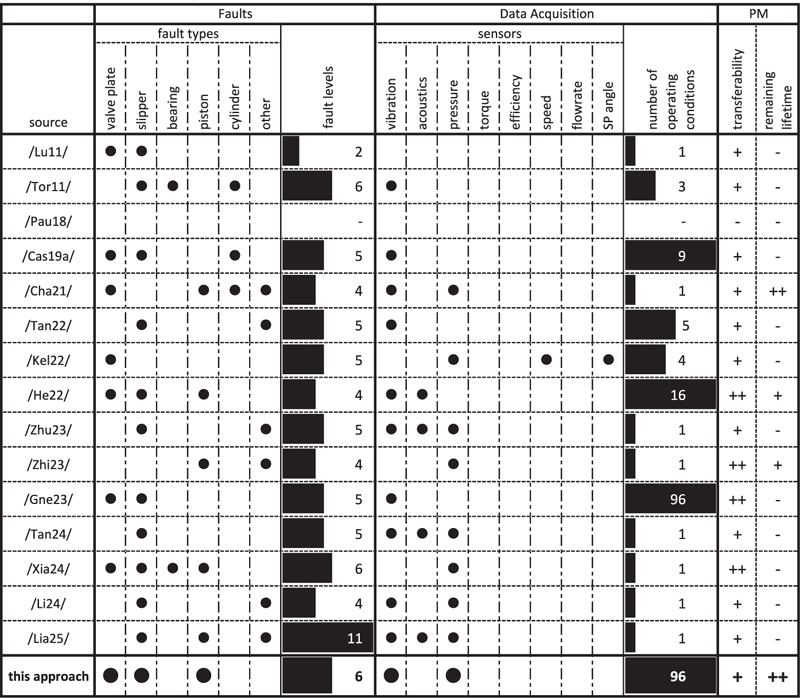
Table 1 provides an overview of the literature on knowledge-based condition monitoring (CM) in axial piston pump systems, aiming to categorize and summarize key findings in a structured manner. The black bars are set to a maximum value to improve the visibility of the variation in the lower range, set to 16 for the column of operating conditions for example. The literature review is organized into the following main categories: investigated faults, data acquisition methods, and a judgment on predictive maintenance (PM) status. The block of the investigated faults is divided into the components where the faults are applied, such as valve plate, slipper, or bearing faults. The number of fault levels investigated across all fault types is also given, offering insights into the scope and depth of fault analysis conducted in the literature. The section on data acquisition methods outlines the sensors used for the fault detection, along with the number of operating conditions considered. Finally, Table 1 provides an assessment of PM status, offering an outlook on the transferability and remaining lifetime aspects of the CM approaches discussed in the literature.
Table 1 Systematic literature overview of implementing CM in APUs
All these studies, as well as the present work, focus on wear detection in pumps and utilize vibration sensors as the primary source for fault diagnosis. The authors Gnepper et al. investigate the effectiveness of high-frequency vibration signals (up to 1 MHz) and compare them to conventional accelerometers (20 kHz). The results demonstrate that high-frequency vibration sensors are more effective at detecting faults than standard vibration sensors with lower sampling rates.
Torikka places a strong emphasis on feature extraction techniques, including time- and frequency-domain methods. A key finding of his study is the recommendation of wavelet transformations as a robust tool for identifying early fault indicators in high-frequency vibration signals. Furthermore, he discovered that a cost-effective ‘knock sensor’ provides even better results than an expensive accelerometer due to its nonlinear transfer characteristics.
Recent studies have aimed to optimize signal preprocessing by utilizing original sensor data in both time and frequency domains. They converted time series into Continuous Wavelet Transform (CWT) diagrams depicted in Figure 1 and applied Deep Learning (DL) algorithms for analysis. Additionally, they’ve used Bayesian optimization to fine-tune Convolutional Neural Network (CNN) hyperparameters.
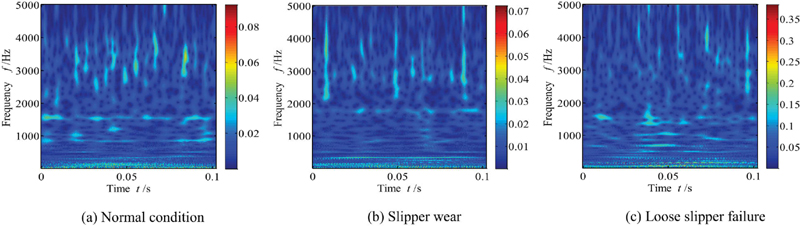
Figure 1 Continuous Wavelet Transformation (CWT) representation of vibration signal for CNN model.
Another novel approach is the use of physics informed machine learning (PIML), which promises a better interpretation of the algorithm results. For this purpose, combines a neural network with the mass conservation equation in the exhaust pipe for different piston wear levels.
To summarise, previous investigations on displacement units have limitations, as they are restricted to a few operating points, and no systematic investigation of the minimum sensor configuration as well as the influence of the OC set has been carried out to date. Many different algorithms are often trained and the results compared with each other. From the authors’ point of view, however, these findings only provide limited added value for others, as the performance of the algorithms is heavily dependent on the data set.
The last row of Table 1 gives the perspective for this research: The overall aim of this project is to develop transferable and intelligent algorithms that function as reliably as possible for a holistic recording of the component condition, including load history, and the necessary minimum requirements for data generation. This paper presents the first milestone towards that perspective.
This section provides an overview of the artificially worn pump parts, the test rig and sensors, followed by a description of the measurement procedure and a brief introduction of the methodical approach of the ML algorithms. More details as well as the pump efficiencies for the different faults are presented in.
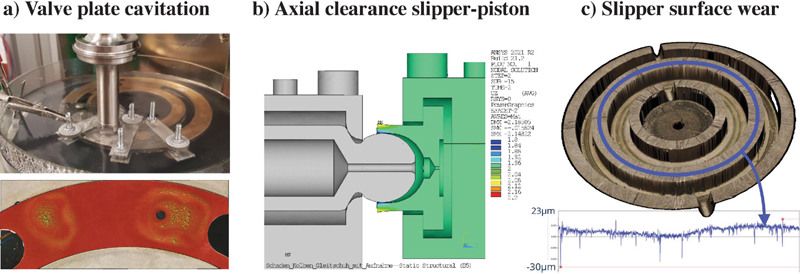
Figure 2 Artificially damaged pump parts, manufactured as realistically as possible (more details in).
In a survey, the faults of field returns of the test pump were evaluated and classified. Figure 2 presents three of the most common types of damage that were manufactured as realistically as possible. In order to determine the location and intensity of the cavitation damage, simulations were carried out at increased speeds and measurements were taken at very low suction pressures. Based on the results, a template was produced and attached to the valve plate to determine the shape and position of the cavitation damage. Real cavitation erosion at three different magnitudes was induced locally in the transition zone between low and high pressure using a sonotrode, see Figure 2a). For the studies presented in this work, only the first fault level with a very small cavitation volume of 3 mm is considered.
One type of damage that can lead to total failure of the pump is axial clearance between slipper and piston. In order to estimate the necessary axial force, a finite element analysis (FEA) of the process was performed, see Figure 2b). All nine slipper-piston joints were then stretched on a tensile testing machine, using a fixture to clamp both parts without damaging the sliding interfaces. A mean value of 179 m clearance was achieved, with a standard deviation of 7 m. This compares to an initial mean clearance of 48 m with a standard deviation of 11 m.
Slipper sealing lands were damaged using a filing tool with control of the achieved damage levels by profilometer measurements, illustrated in Figure 2c).
A standard test rig setup capable of measuring pump efficiency was equipped with sensors to capture high frequency pressure and acceleration signals. Suction pressure was set to 1.8 bar to ensure that cavitation was avoided over the entire operating range. Pressure and temperature were acquired at a low sampling frequency at the ports and leakage outlet for assessment and control of the desired operating condition. Figure 4 gives an overview of the installed high frequency sensors sampled at 16.4 kHz. Pressure is again measured at the inlet and outlet port; two uniaxial accelerometers are placed on the top and the side of the pump housing and a triaxial accelerometer is mounted on the front plate.
Measurements were conducted across the entire operating range of the pump. In total, six pressure levels and four stroke angles were measured at four different speeds, resulting in 96 operating conditions. Figure 3 provides the measured leakage over all speeds and pressures at 100 % swashplate angle. To quantify the wear levels of the faults, the leakage of the faulty pumps was compared to that of the healthy reference pump. Figure 3 shows that all faults are placed in the range of minor wear only little rising the leakage of the pump, complicating wear detection.
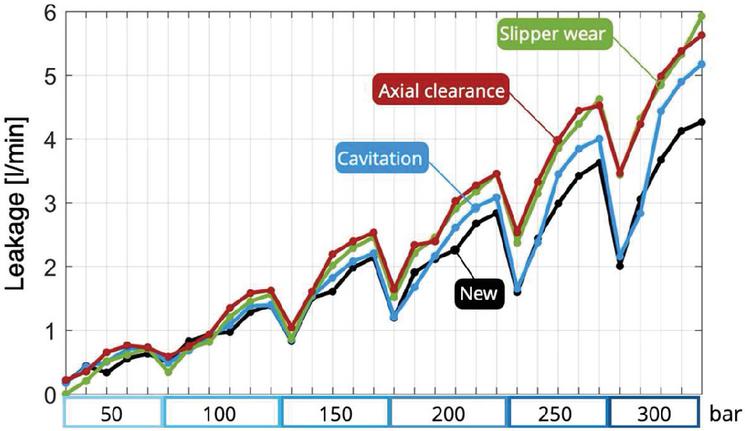
Figure 3 Leakage of the different faults over many operating conditions at 100 % swashplate angle with rising speed for each pressure level.
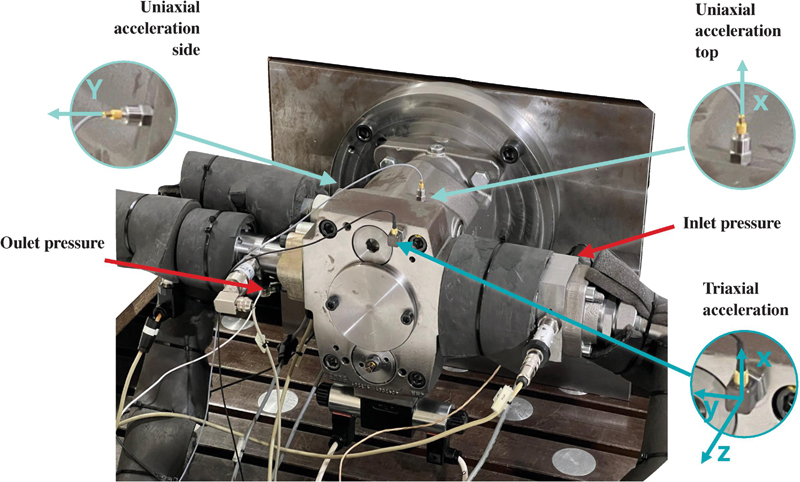
Figure 4 Overview on the installed high frequency sensors.
Table 2 shows a reduced set of 28 OCs, that presents a representative selection to build and test the models. The findings of this paper are confined to this representative set, as a more sophisticated method, currently under development, is being employed to reduce the features for the entire dataset due to the extensive number of features.
The measurement period was chosen to be 10 seconds, which should be sufficient to capture several periodic motion cycles for each speed level. Temperature has a significant influence on leakage and thus damping of vibrations, which are also relevant for fault detection. Therefore, the inlet temperature was regulated to 40C3C for all measured operating conditions. Concerning field applications where temperature will vary, it can be measured cost-effectively and taken into account in the evaluation.
has shown that flow pulsation changes due to faults but is dependent on the pipeline length and therefore the behaviour is less transferable to other systems. In the presented setup, a low reflection line terminator (LRLT) is used, which for each operating condition is steered to mimic the impedance of a pipeline of infinite length, thereby eliminating pressure pulsation reflections of the downstream hydraulic circuit. The LRLT guarantees that any change in pressure pulsations is attributed to the artificially added damage, ensuring transferability of the high pressure pulsation signal.
Initially, a reference measurement was conducted under healthy conditions without any damaged parts. This data serves as a baseline for comparison with subsequent measurements involving damaged parts. Each defect was measured separately, without combining multiple defects.
Table 2 Overview of representative set of 28 operating conditions (OCs)
| 100 % | 75 % | 50 % | 25 % | ||||
| n [rpm] | p [bar] | n [rpm] | p [bar] | n [rpm] | p [bar] | n [rpm] | p [bar] |
| 500 | 200 | 500 | 150 | 500 | 50 | 500 | 100 |
| 1000 | 100 | 500 | 250 | 1000 | 150 | 500 | 250 |
| 1000 | 250 | 1000 | 50 | 1000 | 300 | 500 | 300 |
| 1500 | 150 | 1000 | 200 | 1500 | 50 | 1000 | 150 |
| 1500 | 200 | 1500 | 100 | 1500 | 250 | 1500 | 50 |
| 2000 | 50 | 1500 | 300 | 2000 | 100 | 2000 | 200 |
| 2000 | 300 | 2000 | 150 | 2000 | 200 | 2000 | 250 |
Figure 5 provides an overview of the specific steps for implementing ML algorithms. A very detailed description of the used libraries and algorithms are published in the previous paper. The first step of data pre-processing involves formatting the measurement data into accessible structures and file formats for the Python-based algorithm. The data is segmented into uniform characteristic lengths to ensure consistent relevance across all training data. Since wear effects in axial piston pumps are cyclostationary, the segment length is defined as two revolutions.
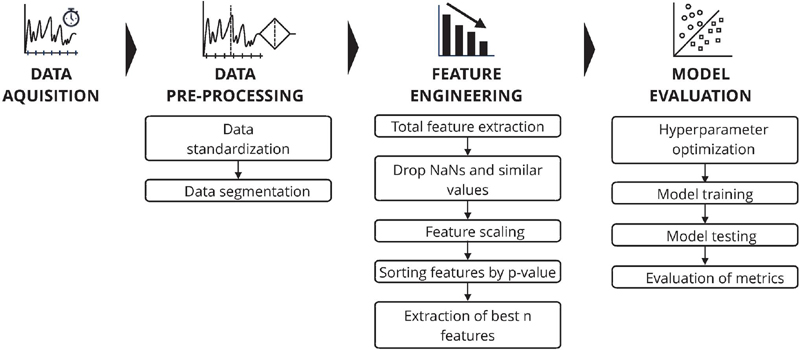
Figure 5 Methodical approach to implement ML algorithms.
TSFresh is used to extract features from the time series. To ensure equal weighting of all features, the features are scaled using the StandardScaler from the scikit-learn library, allowing for a consistent orientation of the separating hyperplane. The p-value is used to calculate the relevance for each of these features. Then sets of the [5, 10, 20, 50, …] most promising features are evaluated. For the data examined, TSfresh calculates a maximum of around 700 features.
In the next step, the features are given to the models, which learn patterns and relationships between features and target labels to make predictions. As the performance of different algorithms is highly dependent on the data analysed, two successful algorithms in the field are used (f.e.), a Support Vector Machine (SVM) and the XGBoost Algorithm. Each algorithm uses hyperparameters, that control the model’s complexity, learning process, and generalization ability, impacting its overall performance. The hyperparameters are newly optimized using the optuna library for each data set of the following studies. The data is split into training and test data and evaluated with a “KFold” (4.1 and 4.2) and a “GroupKFold” (4.3) cross-validation strategy using 10 and 24 folds. Each fold corresponds to an independent model with non-overlapping test data, thus resulting in N (10 or 24) accuracy values.
This chapter describes a method to reduce the number and sampling rate of sensors to only one sensor, while maintaining a high accuracy of the prediction of the different faults. Then, it shows the results of the fault prediction for each high-frequency sensor individually using many features. For the best sensor, which is a triaxial accelerometer mounted on the front plate of the pump, it presents a virtual downsampling study to investigate the accuracy results with the data quality of a low-cost sensor. Finally, it shows the impact of different OC sets on fault detection.
Figure 6 (left) provides a boxplot of the mean accuracies and their dispersion of different sensors, using 700 features for both estimators, Support Vector Classifier (SVC) and XGBoost Classifier (XGBC) for classifying all three faults and the healthy pump. Using all components of the triaxial acceleration sensor results in perfect fault prediction. When examining the individual components (x, y and z), the data from the y-component of the triaxial sensor provides a very high accuracy, also compared to the uniaxial acceleration sensors and the high-pressure sensor. The reason for those differences is not yet conclusively determined. One possible explanation regarding the valve plate cavitation is that cavitation influences the pressure build-up in the piston, thereby affecting the forces and torques on block and valve plate. Due to the torque characteristics, this pump experiences significant torque fluctuations around the y-axis, which could be altered by the faults.
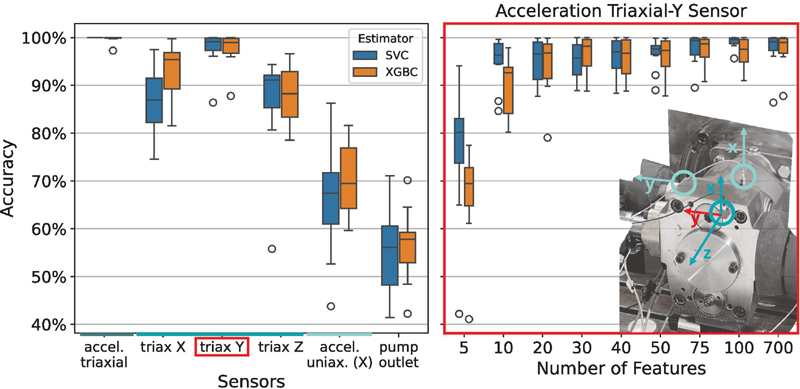
Figure 6 Accuracy results for different sensors (left) with a total of 700 features and accuracy results for different numbers of features of the triaxial-Y sensor (right).
The right plot in Figure 6 shows the accuracy of the triaxial-Y sensor depending on the number of features. The SVC model already provides very high accuracies over 95 % for feature sets with more than 10 features, while the XGBC model achieves similarly high accuracy with more than 20 features.
The learning curves of both, the entire set of all features and sensors as well as the reduced set of 20 features of the triaxial-Y sensor are provided in showing that both models are not overfitted and well generalised.
The goal is, to establish a low-cost sensor box for retrofitting to the pump. At the present time, no market standard has been established for vibration sensors. There are extremely inexpensive components in the cent range, from sensor to PCB, available from the hobbyist sector. At the same time, there are expensive industrial products for specific applications with special characteristics. The cost of these sensors varies significantly between manufacturers, with prices ranging from 100 to 1000 e per sensor, depending on factors such as certifications, sampling rate, number of axes, and DAQ hardware. However, a rough estimation would place the cost at approximately 100 e per axis, with a notable increase in costs observed for higher sampling rates, resulting in the following questions:
– What sampling rate is necessary to obtain the frequency content in the data that is important for wear detection?
– What effect do the lower sampling rates have on prediction quality?
– What is the influence of the number of axes on prediction accuracy?
The triaxial acceleration sensor is used for the following studies, as it achieved by far the best results in wear detection. Furthermore, the evaluations are performed with the XGBoost algorithm only, as both algorithms achieve almost similar accuracies, see Figure 6 for both statements. To simulate lower sampling rates, the original sampling rate of 16.4 kHz is divided by an integer. This procedure recreates the target frequency by first eliminating the high frequency content of the sensor signal using a Butterworth filter and then retaining only every nth reading of the raw time series data. The Butterworth filter is a digital low-pass filter that is configured so that the amplitude in the frequency spectrum is approximately zero from the Nyquist frequency of the sampling frequency to be simulated, without affecting the amplitude curve for lower frequencies too much. This ensures that no information content remains in the sensor signal above the selected sampling frequency.
Figure 7 (left) shows exemplary the results of the standardized time signal of the y-axis of the triaxial acceleration sensor over half a pump revolution for only using half of the data (8.2 kHz) and a fourth of the data (4.1 kHz). The corresponding frequency spectrum is given to the right. Due to the Nyquist-Shannon sampling theorem, the simulated sampling frequency of 8.2 kHz only allows statements to be made about the frequency behaviour up to the so-called Nyquist frequency, which is half of the sampling frequency.
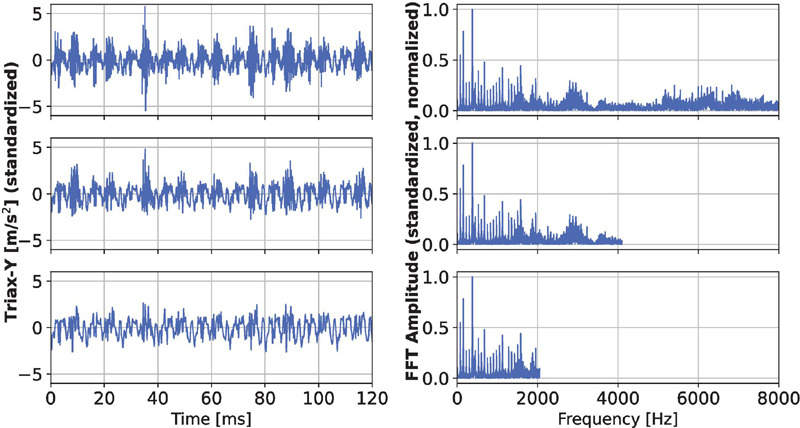
Figure 7 Example of virtual downsampling of raw data of the triaxial-Y sensor: standardized time signal of half a pump revolution (left) and corresponding frequency content (right) for the three investigated downsampling rates.
The fault classification of chapter 4.1. is repeated using only the triaxial sensor with all components x, y, z and only the y-component, newly extracting 700 features for each sampling rate as well as repeating the hyperparameter optimization on the new features. Figure 8 (left) shows the accuracy results for the different sampling rates. The prediction accuracy decreases with lower sampling rates, for the triax-all sensor from 100 % to approx. 91 %. If only the y-component is considered, almost 90 % accuracy can still be achieved for 4.1 kHz sampling frequency.
However, an accuracy of around 90 % is not considered sufficient to make reliable statements about the health status of the pump, as in certain applications a failure costs several hundred dollars per minute. One possibility to increase the accuracy of predictions is to reduce the complexity and variance of the data, also known as Bias-Variance-Trade-off. This will be demonstrated using two examples: reducing the number of classes and reducing the diversity of OCs.
In most applications, knowing the exact cause of damage is secondary, whereas the fact that the pump is damaged and will potentially fail soon is very important information that must be predicted very accurately. A binary classification with only two labels ‘healthy’ and ‘worn’ is therefore sufficient, with the ‘worn’ label indicating the beginning of damage (see Figure 3). The results of such a binary classification are shown in Figure 8, right. The accuracy could be raised drastically compared to the classification of all faults in the left plot and using all three components of the sensor, an almost perfect prediction is possible for only 4.1 kHz sampling rate.
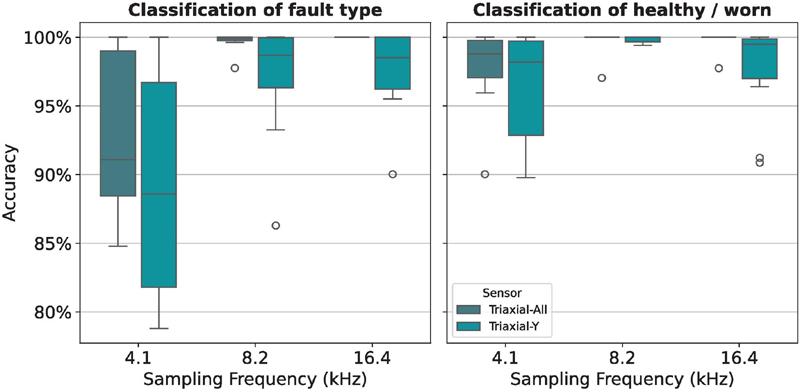
Figure 8 Accuracy results for the triaxial acceleration sensor over different sampling rates for the classification of all fault types (left) and binary classification (right).
Another way to improve the accuracy is to reduce the variance of the OCs. The different speeds, pressures and swashplate angles significantly change the leakages, forces and torques and thus also the damping and vibration spectra. For example, it can be assumed that the pressure has an influence on the amplitudes of the pulsation, while the speed changes the frequency spectra. However, many wear detection features are also based on the amplitudes and frequency ranges of the spectra. A strong variance in the operating points could therefore lead to more difficult wear detection, as the algorithm cannot differentiate between the influence of wear and operating points. To proof this thesis, three different sets of 24 operating conditions with constant pressures (left), swashplate angles (middle) and speeds (right) are studied, compare Table 3.
Table 3 Overview of three different sets of operating conditions (OCs) with constant pressures (left), swashplate angles (middle) and speeds (right)
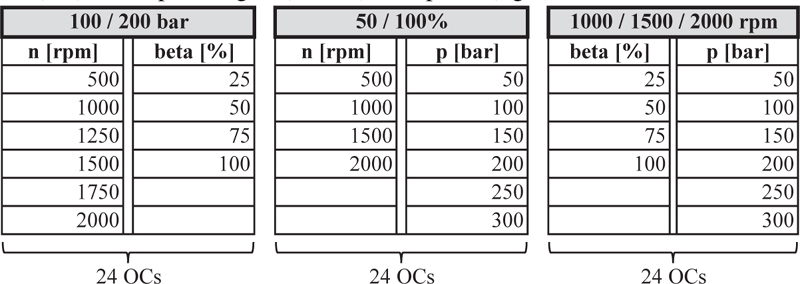
For each set, features are re-extracted and hyperparameters optimized, only considering the y-component of the triaxial accelerometer at a 4.1 kHz sampling rate. The present study demonstrates the impact of the OC on the model quality, which must be taken into account when splitting the data for the training and test data sets. The presence of trained OCs in the test data set results in significantly enhanced prediction accuracy compared to scenarios where the test data set is evaluated with unseen OCs (accuracy can drop from 100% to 20% depending on the data set). For this reason, GroupKFold cross validation is employed in this study to confront the model with OCs that have not yet been trained, thereby accentuating the impact of the OC. The data set is divided into 24 folds, with 23 folds (OCs) allocated for training and one fold reserved for testing with an unseen OC. The reference data set of 28 OCs uses 28 folds with the same strategy.
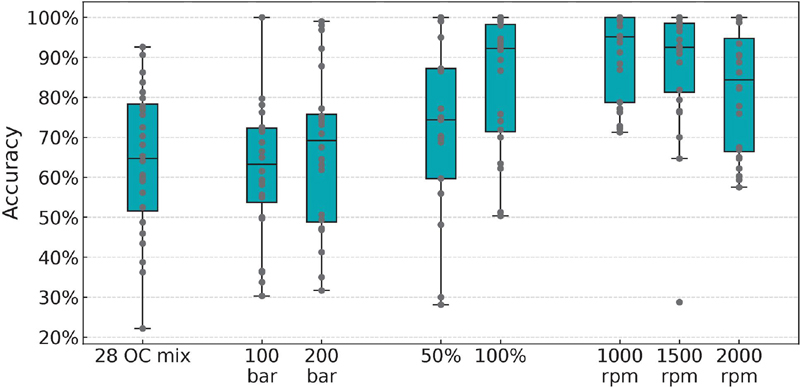
Figure 9 Accuracy results for the triaxial-y acceleration sensor at 4.1 kHz sampling rate for different sets of OCs with constant pressures, swashplate angles and speeds.
Figure 9 shows the accuracies of the folds for the full set of 28 OCs compared to the accuracies of the new sets of 24 OCs with constant pressures, swashplate angles and speeds. Constraining the speed has a very positive impact on the accuracy. The enhancement in accuracy with respect to speed can be attributed to the inherent oscillations of the pump, as the excitation of vibrations is predominantly influenced by speed and to a lesser extent by pressure. The influence of the swashplate angle has not yet been conclusively clarified.
For wear detection in real-world applications, it is extremely advantageous to keep the variation caused by the operating states of the pump as low as possible, which could be implemented as follows:
(A) Reduction of the variance to as few parameters as possible, e.g. by a predefined test cycle at known conditions that could be run at start/warm-up or machine hold for some seconds.
(B) Measure (e.g. temperature) or predict the still varying variables analytically (speed) or with a simple ML model (e.g. swashplate angle).
(C) Train different models for different operating ranges.
This study investigates fault prediction in axial piston pumps under varying operating conditions. Three types of artificial faults were introduced: valve plate cavitation, axial clearance between slipper and piston, and wear of the slipper sealing land, all indicate the beginning of damage, with only a small increase in leakage. Measurements were conducted for nearly 100 distinct operating conditions, covering different speeds, pressures, and swashplate angles with the goal of an economic fault detection method. In the following, the key findings are summarized.
1. Best sensor for fault prediction
Among the different pressure and acceleration sensors used at a sampling rate of 16.4 kHz, the triaxial acceleration sensor achieved the highest prediction accuracy of up to 100%, which reduces to 99% considering only its y-component.
2. Impact of sampling rate and number of axes on accuracy
To investigate the feasibility of using low-cost sensors, the sensor signals were virtually downsampled from 16.4 to 4.1 kHz. This study was conducted using the triaxial acceleration sensor with all components as well as its y-component alone, as number of axes and the sampling rate significantly determine the sensor price. The results showed that, at 4.1 kHz, the prediction accuracy of the y-component alone dropped to 89%, while using all components of the sensor yielded an accuracy of 91%. While these results are promising, they indicate that higher sampling rates are beneficial for achieving optimal accuracy.
3. Accuracy improvements via complexity reduction
By reducing the number of labels from multiple fault types to only two labels (‘good’ and ‘worn’), the accuracy increased significantly to almost 99%. This approach aligns with practical needs, where identifying whether a pump is “healthy” or “faulty” is often more relevant than determining the specific type of fault.
4. Influence of operating condition sets
It is imperative to emphasise the considerable impact of operating conditions on fault detection. The pump’s operation at varying speeds, pressures, and swashplate angles excites the pump to varying vibrations and natural frequencies, making fault detection highly challenging, as it relies on identifying damage-induced changes in vibration behavior. This was demonstrated by analyzing different sets of OCs with constant speeds, pressures, and swashplate angles. Among these, maintaining a constant speed and swashplate angle had the most significant effect, improving fault detection accuracy by more than 20%, suggesting predefined test cycles at known conditions for example at start-up of the machine.
All measurements were carried out under idealised conditions with constant inlet and outlet pressures and a constant inlet temperature. These controlled and reproducible conditions allow the investigation of defined disturbances on the model accuracies as described above. For a good, robust and at the same time general model, a good balance between variance and bias is important. The variance due to different operating conditions should be kept as low as possible in practical application but is automatically induced by manufacturing tolerances and system setups. With measurements on real machines in the field, collecting a large amount of data a more general and robust model can be set up. Further investigations include the influence of different temperature ranges and the transferability of developed monitoring techniques to other pumps of different sizes and manufacturers, ensuring broad industrial applicability.
While the calculated accuracy values cannot be directly transferred in absolute terms, the paper shows the impact of the number of axes and sampling rate on fault prediction as well as the influence of different OCs. This lays the groundwork for the development of a low-cost sensor box for retrofit applications, enabling efficient condition monitoring with minimal sensor configuration.
The presented research activities are part of the project “Causal Condition Monitoring von Verdrängereinheiten durch Verschleiß- und Schadensdetektion in Korrelation zur Betriebs- und Lastsituation” (Ref. No. 22012 BR/1). The authors would like to thank the Fluid Power Research Fund of the VDMA for the funding and support.
Furthermore, a special thanks is given to Dr. Sven Werdin and the Institute of Solid Mechanics, TU Dresden, for facilitating machinery and guidance for the tensile test.
S.H. developed and organized the overall project concept. As the main author of the manuscript, S.H. was responsible for the design and refinement of the condition monitoring procedure and created written content and figures. S.K. was responsible for feature analysis, hyperparameter optimization, model creation, training, and testing of the models and generated some figures showing the results. A.S. and M.L. conducted the implementation of the damaged pump parts and were responsible for the setup, execution and data processing of the measurements. J.W. acted as the overall scientific supervisor.
Y. Benjamini, Y. Hochberg Controlling the False Discovery Rate: A Practical and Powerful Approach to Multiple Testing, Journal of the Royal Statistical Society: Series B (Methodological), Volume 57, Issue 1, Pages 289–300, Tel Aviv, 1995, https://doi.org/10.1111/j.2517-6161.1995.tb02031.x.
Casoli, P.; Pastori, M.; Scolari, F.; Rundo, M. A Vibration Signal-Based Method for Fault Piston Pumps, In: Energies, 2019.
Casoli P, Pastori M, Scolari F A multi-fault diagnostic method based on acceleration signal for a hydraulic axial piston pump, AIP Conference Proceedings 2191, 020037, 2019.
Q. Chao, Y. Shao, C. Liu, X. Yang Health evaluation of axial piston pumps based on density weighted support vector data description, Reliability Engineering and System Safety, vol. 237, Sep. 2023
Chinniah, Y. Fault detection in the electrohydraulic actuator using extended Kalman Filter, Dissertation, University of Saskatchewan, 2004.
Christ, M., Braun, N., Neuffer, J., and Kempa-Liehr, A. W. (2018). Time Series FeatuRe Extraction on basis of Scalable Hypothesis tests (tsfresh – A Python package). Neurocomputing, 307, 72–77. https://doi.org/10.1016/J.NEUCOM.2018.03.067.
C. Dong, J. Tao, H. Sun, Q. Chao, C. Liu Inverse transient analysis based calibration of surrogate pipeline model for fault simulation of axial piston pumps, Mechanical Systems and Signal Processing, vol. 205, Dec. 2023.
Gnepper, O., Hitzer, H., Enge-Rosenblatt, O. Predictive Diagnosis in Axial Piston Pumps: A Study for High Frequency Condition Indicators Under Variable Operating Conditions, In: International Journal of Prognostics and Health Management, vol. 14, no. 1, 2023.
Hacke, B.; Reimers, E.; Hofmann, G. Alles auf den Prüfstand – Neue Wege im Condition Monitoring, In: Antriebstechnik 12, 2007, S. 4 –42.
Y. He, H. Tang, Y. Ren, A. Kumar A deep multi-signal fusion adversarial model based transfer learning and residual network for axial piston pump fault diagnosis, Elsevier B.V., Mar. 2022.
Horn, S., Shorbagy, A., Lenz, M., Knoll, S., Winter, M., Weber, J. Causal condition monitoring for axial piston pumps: Prediction of different faults under variable operating conditions, 2024 International Maha Fluid Power Conference, 2024.
Isermann, R. Fault-diagnosis systems: an introduction from fault detection to fault tolerance, Berlin: Springer, 2006.
N. Keller, A. Sciancalepore, A. Vacca Demonstrating a Condition Monitoring Process for Axial Piston Pumps with Damaged Valve Plates, International Journal of Fluid Power, vol. 23, no. 2, pp. 205–236, 2022.
Khoshzaban-Zavarehi, M. Online condition monitoring and fault diagnosis in hydraulic system components using parameter estimation and pattern classification, Dissertation, University of British Columbia, Vancouver, 1997.
Kreß, R. Robuste Fehlerdiagnoseverfahren zur Wartung und Serienabnahme elektrohydraulischer Aktuatoren, Dissertation, TU Darmstadt, 2002.
Y. Li et al., A novel interpretable semi-supervised graph learning model for intelligent fault diagnosis of hydraulic pumps, Knowledge-Based Systems, vol. 305, 2024.
P. Liang, X. Wang, C. Ai, D. Hou, and S. Liu SRSGCN: A novel multi-sensor fault diagnosis method for hydraulic axial piston pump with limited data, Reliability Engineering & System Safety, vol. 253, 2025.
C. Lu, N. Ma, Z. Wang Fault detection for hydraulic pump based on chaotic parallel RBF network, EURASIP Journal on Advances in Signal Processing, pp. 1–10, 2011.
Münchhof, M. Model-based fault management for a hydraulic servo axis, Dissertation, TU Darmstadt, 2006.
Münchhof, M. Model-based fault management for a hydraulic servo axis, In: The 5th International Fluid Power Conference (5. IFK), Bd. 3, S. 419–430, Aachen, 2006.
Münchhof, M. Fehlerdiagnose für hydraulische Servo-Achsen, In: Automatisierungstechnik, S. 96-103, 01/2007.
Münchhof, M. Modellbasierte Hydraulik-Überwachung - Übersicht über modellbasierte Verfahren zur Überwachung linearer Servo-Achsen, In: O+P Ölhydraulik & Pneumatik, S. 184-193, 04/2007.
G. Paulmann, G. Mkadara Condition monitoring on hydraulic pumps – lessons learnt, European Rotorcraft Forum (ERF 2017), p. 13, 2018.
Razavi, B. Condition monitoring in a hydraulic system of an industrial machine using unscented Kalman Filter, Master-Thesis, University of British Columbia, Vancouver, 2007.
S. Tang, Y. Zhu, S. Yuan Intelligent fault diagnosis of hydraulic piston pump based on deep learning and Bayesian optimization, ISA Transactions, vol. 129, pp. 555–563, Oct. 2022.
S. Tang, B. Cheong Khoo, Y. Zhu, K. Meng Lim, S. Yuan A light deep adaptive framework toward fault diagnosis of a hydraulic piston pump, Applied Acoustics, vol. 217, Feb. 2024.
Torikka T. Bewertung von Analyseverfahren zur Zustandsüberwa chung einer Axialkolbenpumpe, Dissertation, Rheinisch-Westfälis chen Technischen Hochschule Aachen, Fakultät für Maschinenwesen, Aachen, 2011.
Verein deutscher Ingenieure VDI 2888 1999-12, Zustandsorientierte Instandhaltung, Berlin, 1999.
Wirth, R. Entwicklungstendenzen zur vollautomatischen Diagnose von Getriebeschäden, In: VDI Berichte 1826, 2004, S. 117–134.
S. Xia, W. Huang, and J. Zhang A novel fault diagnosis method based on nonlinear-CWT and improved YOLOv8 for axial piston pump using output pressure signal, Advanced Engineering Informatics, vol. 64, 2024.
Z. Wang, Z. Zhou, W. Xu, C. Sun, R. Yan Physics informed neural networks for fault severity identification of axial piston pumps, Journal of Manufacturing Systems, vol. 71, pp. 421–437, Dec. 2023.
Y. Zhu, S. Tang, S. Yuan Multiple-signal defect identification of hydraulic pump using an adaptive normalized model and S transform, Engineering Applications of Artificial Intelligence, vol. 124, Sep. 2023.

Svenja Horn received her diploma degree in Aircraft Construction from the Technical University of Dresden in 2018. Since then, she has been working as a research assistant at the Chair of Fluid-Mechatronic Systems, focusing on improving the efficiency and service life of axial piston pumps. Her research concentrates on tribological phenomena at the slipper-swashplate interface, which she investigates using simulations, a hydrostatic tribometer and pump measurements. Furthermore, she applies machine learning algorithms for pump condition monitoring and lifetime prediction.

Ahmed Shorbagy obtained his Master’s degree in Aerospace Engineering from the Technical University of Berlin in 2015. Since completing his degree, he has been engaged in the development and testing of Computational Fluid Dynamics and Fluid-Structure Interaction models to enhance engineers’ understanding of positive displacement machines. In his role as a research assistant at the Chair of Fluid-Mechatronic Systems, he integrated experimental methods with computational approaches to facilitate a thorough analysis of tribological interfaces, linking their behavior under various operational conditions to the overall efficiency of the pumps. His work aims to clarify the mechanisms of wear and friction, contributing to improved design and operational strategies for hydraulic components.

Michael Lenz graduated from TU Dresden in Applied Mechanics in 2014. As a research assistant first at TU Dresden’s Chair of Dynamics and Mechanism Design and more recently the Chair of Fluid-Mechatronic systems, he has worked on a variety of subjects such as resilient rail wheels and rubber mechanics, ring spinning, sealing wear and hydropump acoustics. Current research interests include pump dynamics and psychoacoustics as well as special sealing applications.

Simon Knoll graduated from the Technical University of Dresden in 2025 with a diploma degree in Mechanical Engineering, specializing in fluid power. During his studies, he focused on research related to the slipper-swashplate interface in axial piston pumps and using machine learning with sensor data to monitor pump conditions. He is currently working as a research assistant at the Chair of Fluid-Mechatronic Systems.
International Journal of Fluid Power, Vol. 26_2, 319–342.
doi: 10.13052/ijfp1439-9776.2628
© 2025 River Publishers