Digital Hydraulic Technology for Linear Actuation: A State of the Art Review
Viktor Hristov Donkov1,*, Torben Ole Andersen1, Matti Linjama2 and Morten Kjeld Ebbesen3
1Aalborg University, Aalborg, Denmark
2Tampere University, Tampere, Finland
3University of Agder, Grimstad, Norway
E-mail: vhd@et.aau.dk
*Corresponding Author
Received 05 May 2020; Accepted 18 November 2020; Publication 04 December 2020
Abstract
This paper analyses the current state of the art in linear actuation with digital hydraulics. Based on the differences in their aims the paper partitions the area into four actuation concepts – parallel valve solutions, single switching valve solutions, multi-chamber cylinders, and multi-pressure cylinders. The concepts are evaluated based on accuracy and smoothness of motion, switching load, reliability, efficiency and the number of components required.
Keywords: State of the art, digital hydraulics, switching valves.
1 Introduction
Hydraulic systems are a popular actuation solution in a number of industries. The high force-to-size ratio is the main reason for their popularity. Applications intended to move large masses (e.g. lifting mechanisms, digging machines) or to work with hard materials (e.g. steel rolling, paper mills, some drilling applications) are areas where hydraulics is and has been an attractive solution.
Unfortunately, the overall efficiency of the hydraulic systems can be low depending on the work area; part loading situations can be especially problematic. The cost of energy has been increasing as the world tries to move towards greener solutions and this puts pressure on traditional hydraulics to evolve. Digital hydraulics is one of the fields concerned with improving the energy efficiency and reliability of traditional hydraulics [1, 2]. The field has been growing and the theoretical work dominating the field until now is starting to produce commercially viable results.
It is important to note that for the purposes of this paper the field of digital hydraulics does not refer to concepts in which digital sensors are used in standard systems i.e. electronic load-sensing. It also does not refer to the digitization trend associated with Industry 4.0 or the Internet of things. In this paper digital hydraulics is the field of study in which hydraulic components (most often valves) are either turned on or off (opened or closed). This on/off nature is the digital part of digital hydraulics.
Recently, several digital hydraulic solutions have successfully been implemented in industrial applications [3]. Winkler et al. mention in [3] that a micro-positioning system for milling machines for Daimler has been working since 2014; a gap control solution for paper mills was successfully brought to market by Valmet [3]; and a digital hydraulic tilting system for the Finish Pendolino trains was introduced in 2015 [3]. The company Valmet has published a document in which they claim that digital hydraulics can reduce lost profit due to reliability by up to 35000 EUR per year [4]. The most widely cited state of the art paper in digital hydraulics was published in 2011 [5], but since then the field has changed considerably. This is the reason for making this new state of the art paper.
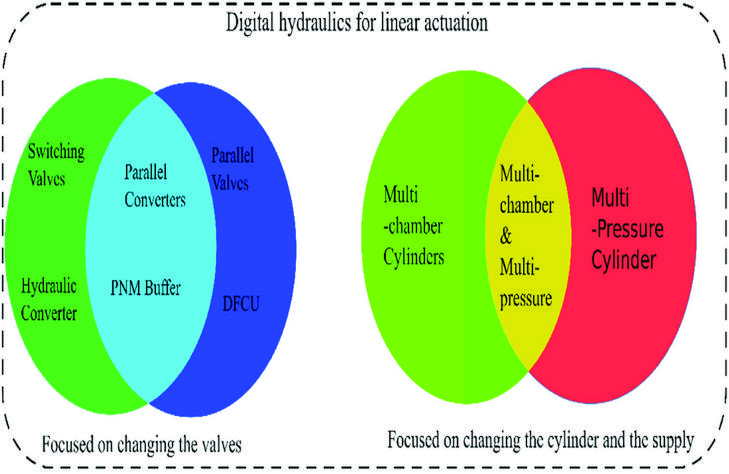
Figure 1 Digital Hydraulic fields and their overlap.
The papers have been divided into four actuation concepts, but the different concepts overlap as seen in Figure 1. The proposed division is based on the changes on the system level. The first two areas focus primarily on changing the valve system between a traditional cylinder and its pressure supply. Section 2 discusses solutions in which a proportional valve can be exchanged with a number of parallel on/off valves. Section 3 contains papers in which a single on/off is used to modulate the flow. The other two sections focus on changing the actuator and/or the pressure supply. In Section 4 cylinders with multiple pressure lines will be discussed and Section 5 contains papers which tackle multi-chamber cylinders. In each section, subsections are devoted to the concept itself, to the key results of the papers, and to a discussion evaluating the concept. The Concept and Discussion subsections offer a bird’s eye view for a reader unfamiliar with the field of digital hydraulics. The papers listed in the Papers section can be used as an index by a reader experienced in the concepts or interested in more details. Each discussion subsection will focus on evaluating the digital hydraulic concept according to accuracy, switching load, reliability, efficiency and the number of components required.
2 Parallel Valve Flow Control
2.1 Concept
The idea behind the parallel valve flow control concept is to use several on/off valves – of either the same or different sizes – connected in parallel in order to simulate a variable orifice. The cumulative opening area of the flow path can be varied by opening specific valves. One of these variable orifices is usually called a Digital Flow Control Unit (DFCU).
One idea behind using flow control units is to arrange four of them as seen in Figure 2. Each flow control unit can allow or restrict the flow between one chamber and one flow source. If a specific flow requirement coincides with a valve opening combination, no continuous switching is required. If the required flow falls between two combinations, on the other hand, the valves need to be switched between the two flow steps in order to achieve the average flow. This leads to a trade-off between tracking accuracy and control effort that needs to be managed. The combination of four DFCUs to simulate a proportional valve has been called a Digital Independent Metering Valve (D-IMV). Controlling each DFCU separately can lead to improved efficiency due to the independent metering of the forward and return flows.
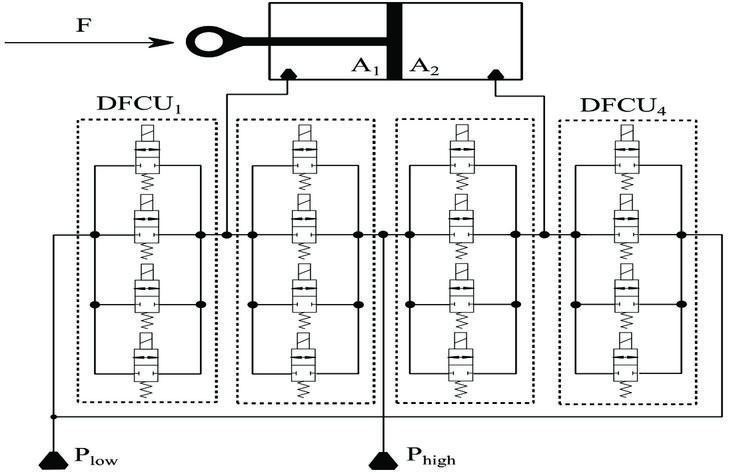
Figure 2 D-IMV concept built from 4 DFCUs.
A comparison between the flow capacity of an example DFCU with 4 binary coded valves and 4 equally coded valves can be seen in Figure 3. Since both DFCUs should have the same maximum flow capacity, the binary coded sizes are 1:2:4:8, while the equally coded valves all have size 3.75. The total area is 15 in both cases, when all the valves are open, but the equally coded DFCU’s resolution is worse. Therefore, in order to get the same resolution, the equal sized valves should be 15 with a relative size of 1. The disadvantage is obviously using more valves, but the benefit is that all valves have the same properties and it does not matter which one is opened or closed. Comparatively speaking, the binary coded DFCU achieves the same resolution with fewer valves, but the drawback is that more dangerous switching events can happen. Dangerous use in this sense is for instance changing from combination 7 to combination 8, which requires that the valves with areas 1, 2, and 4 are closed and the valve area 8 is opened. Due to unknown delays and valve dynamics, a small time period is present when all valves could be closed or all valves could be open. This results in rapid flow changes.
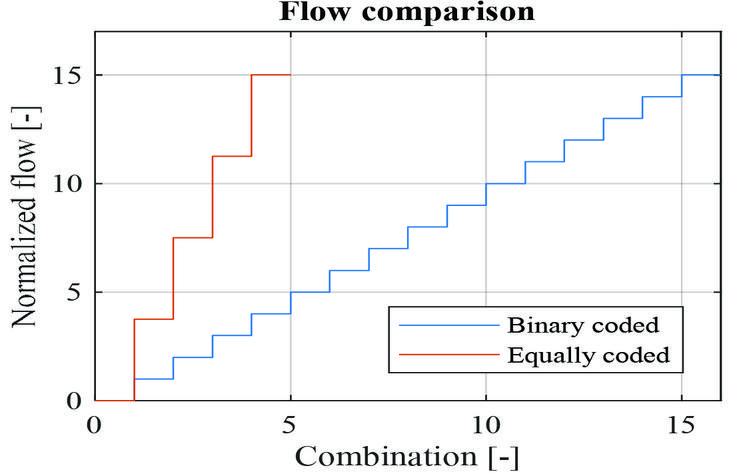
Figure 3 Binary coded vs Equally coded 4 bit valve flows.
Model-based control has been a good way to decide which valves should be opened to follow a specific velocity reference. Papers in Subsection 2.2.1 deal with this subject. As mentioned in the introduction, there is some overlap with other fields and attempts to improve the resolution through Pulse Width Modulation (PWM) have been made. These papers are collected in Subsection 2.2.2. Some interesting papers dealing with reliability and fault detection among other things are described in Subsection 2.2.3.
2.2 Papers
2.2.1 Model-based control
Papers [6–9] are some of the first developments by Linjama et al. in controlling a cylinder with DFCU’s. In the four mentioned papers 4 DFCU units are used to define 4 flow directions. Each cylinder chamber can be connected to the pressure supply or to the tank similar to the architecture in Figure 2. The block diagram of the controller can be seen in Figure 4. In these papers only one DFCU can be opened per chamber. The flow through a DFCU can be calculated analytically using the orifice equation. This is the model part of the model based controller. The major issue is controllability at low velocities. This was researched in [10, 11].
The authors of [10] and [11] allowed three of the DFCU’s to be active at a time. This allows a chamber to be connected to the supply and the tank at the same time. The inclusion improves controllability at low velocities at the cost of energy efficiency. Furthermore when the chamber is connected to two pressures through two different orifices the final pressure in the chamber cannot be calculated analytically any more. Instead, a numerical solution has to be found for each combination. The method uses Newton-Raphson iterations to find the steady state solutions to the systems equations. The system has 20 valves with two states each, which results in 10 possible state combinations. The search area is reduced by analysing the flow balance of each chamber separately by first only considering two active DFCU’s in order to implement the controller in real time. The state equations still have an analytical solution in this way and a control combination can be selected. The combinations involving three active DFCU’s, which are in the vicinity of this combination, are then solved numerically using the Newton-Rhapson method. Further research has iterated upon this basic structure. The papers presented in this subsection are mainly concerned with the robustness of the controller, the computational complexity and accuracy of the valve model used in the model based controller, or obtaining laboratory results.
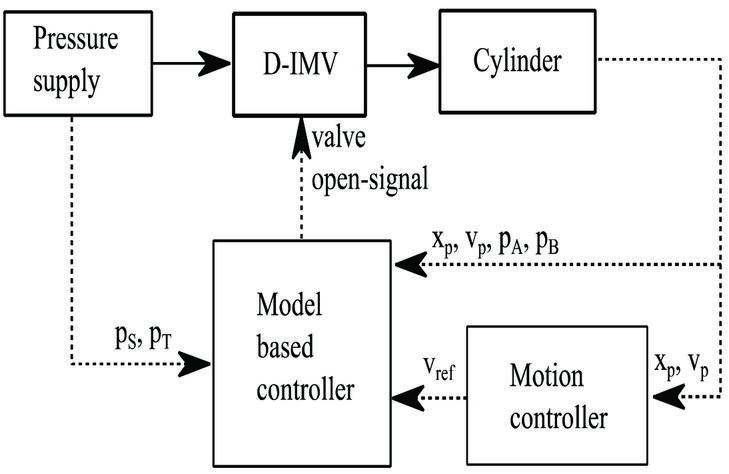
Figure 4 Model based DFCU controller.
Siivonen et al. implemented the DFCU control method from [11] in a mobile hydraulic mining application in [12]. Instead of the normal square root of the pressure difference used in the orifice equation, a general power exponent is used. This power exponent is a tuning parameter for each valve and was found experimentally in laboratory conditions. The control structure was then tuned based on these results. The authors of [12] then tested the system outside of laboratory conditions and found that due to the change in operating conditions the control performance was reduced.
Linjama et al. try to design a more robust motion controller through robust design and mixed sensitivity in [13–16]. According to the authors in [13], the system was stable with 407% increase in the load mass and a 50% reduction in bulk modulus.
Several papers address the valve model used in the model based controller. The general exponent method describes DFCU flows better, but it is computationally intensive. Linjama et al. transform the system equations into scalar form and use Ridders’ method to solve the equations faster in [17]. Linjama et al. present a new valve model based on third or fourth order polynomials in [18]. This also reduces the computation time.
Stauch et al. propose a new valve model, which can be inverted in [19] and then in [20]. The new model allows valves to be open one by one until the desired flow is reached. With this method no search algorithm iterations are needed. The method imposes that the valves are coded with a binary coding. The controller allows the position and force tracking to be decoupled. If the position controller is prioritised, good position tracking is possible even with low inertia systems or poor DFCU resolutions.
Several papers focus on reducing the computation complexity of the controller without changing the valve model. Huova et al. in [21] investigate the possibility of decreasing the computational complexity of the controller established in [11]. The authors introduce a table-based switching cost, instead of the on-line search algorithm. The simplified controller runs 194 times faster. Ersfolk et al. implement the model based controller on a GPU in [22]. The computation time is reduced from 1350 ms on a sequential ARM processor to 7.19 ms on the GPU.
Several papers focus on implementing the control on a wheeled excavator. First, in [23] the system is designed using commercial components. The aim was to achieve a flow rate of up to 400 l/min. The DFCU had 4 control edges with 7 bits each. Four of the valves in each edge had orifices resulting in a binary coding for the first 5 bits as 1:2:4:8. Valves 6 and 7 are opened at the same time to give the 16 in the series 1:2:4:8:16. Ketonen et al. use this valve system to realise independent metering valve control with digital hydraulic valves on a 21-ton Volvo EW210C excavator through a simulation study in [24]. A grading cycle was followed and the results showed that the digital independent metering control could reduce energy consumption by 28–42%. Finally, in [25] Ketonen et al. present the conversion of a Volvo EW210C wheeled excavator from a standard load sensing system into a digital hydraulic system with parallel connected on/off valves. The tests showed a 36% reduction in input energy for a grading work cycle. The authors plan further modifications in order to improve the efficiency.
2.2.2 Introducing PWM in DFCU control
A major problem of DFCUs is that a low number of valves, results in poor flow resolution. Several authors have tackled the possibility of improving DFCU resolutions through introducing Pulse Width Modulation (PWM) into the control structure. If a valve is repeatedly closed and opened in such a way that during one control period it is only open for half of the time, then that valve has delivered approximately half the flow. The ratio dictating how much of the time should the valve be open is known as a duty cycle.
Huova et al. discuss this possibility in [26]. Two of the valves are treated as 5 artificial ones with a binary coding inside the code. These two valves act like 10 binary coded valves. The DFCU has 4 valves, but acts like a DFCU with 12 valves. The largest artificial valve corresponds to a 50% duty cycle of the real valve. The improved resolution resulted in a minimum achieved velocity of 1 mm/s from a maximum of 350 mm/s. This is a max/min velocity ratio of 350. The 4 bit DFCU proposed by [10] discussed in the previous section achieved a ratio of 50.
Paloniity et al. propose a similar scheme in [27] where pulse frequency modulation is used on one of the bits of the DFCU in order to achieve even smaller opening areas. Paloniity et al. report that the method is effective at improving controllability as the average error for a slow trajectory has been reduced by a factor of approximately 4 compared with just the Pulse Number Modulation (PNM) technique.
Paloniity et al. present a method for improving the resolution and the linearity of a digital hydraulic valve system using equal sized on/off valves in [28]. The improvement comes from combining pulse width modulation and pulse frequency modulation into the control structure. All the valves in the DFCU are modulated, but it is done according to a circular buffer. A valve is moved to the back of the buffer when it switches state. This ensures that the same valve is not actuated several times in a row, unless no other valves are available. PFM and PWM are combined in this way and the result is a more equal distribution of the switching duty for the valves, and a wider range within which average flow is linearly proportional to the duty cycle. The method is tested in a laboratory experiment using a vertical differential cylinder with a mass load of 50 kg. Eight prototype valves are used in each of the two DFCUs. The maximum position error during the trajectory is reportedly below 0.2 mm. In comparison, the PNM method achieved 0.8 mm.
Siivonen et al. designed, simulated and tested a digital valve system for a water hydraulic system in [29]. The valve package consisted of 16 prototype on/off valves. The control method used is from [28]. Siivonen et al. conducted 60 days of testing and stated that despite some problems with the valves, performance was still good. The digital solution exceeded the application’s accuracy requirements of 133 m on the cylinder position. Furthermore, it fit within the physical size limitations and had lower water cleanliness requirements.
2.2.3 Other papers
Siivonen et al. present a method for detecting and diagnosing faults in [30]. Only pressure and position measurements are needed to distinguish the faults. The procedure is simple, so it does not require a lot of computations, but it is based on a number of tests which are conducted while the cylinder is not following a trajectory. The procedure cannot be used on-line, which is a disadvantage.
Laamanen et al. discuss the possibility of reducing pressure peaks in the system due to actuation time uncertainty of the digital valves in [31]. The authors examine the possibility of including a weight on the more dangerous switching events. They also examine if the Fibonacci coding has better properties than the popular binary coding. The authors find that even though the dangerous switching events are avoided, the selected event can still exhibit the same property. For instance, when the flow should switch from valves 1, 2 and 3 open to just 4 open, the controller chooses 1 and 4 to be opened. They also find that Fibonacci sequence is theoretically better suited to avoid pressure peaks, due to the smaller steps between flow levels and the possibility of choosing different combinations with the same flow output.
Another benefit of DFCUs is that the components connected in parallel are naturally fault tolerant. Siivonen et al. write in [32] that the systems fault tolerance depends on the software and if faults can be detected online and the control structure is changed to reflect this, all digital hydraulics based on parallel valve combinations can have a degree of fault tolerance. A drawback to including fault tolerance is that the computation requirements are increased.
Lähteenmäki et al. [33] and then later on Ketonnen et al. [34] make a pressure relief valve out of a DFCU through changing the control structure. The DFCU was made of 16 parallel connected equal sized on/off valves. The DFCU was compared to a standard pressure relief valve. The two valves showed similar performance on the test stand with the DFCU achieving a smaller pressure peak. The authors point out that a different pressure relief valve could have performed better.
Huova et al. [35] propose a positioning method for a cylinder based on the on/off valves in a digital valve system realized with DFCUs. The method modulates the flow to one chamber at a time. Due to this, the piston position changes by very small step sizes and achieves a position accuracy of 1 m. This small motion is achieved by using the model of the valve and the model of the cylinder in order to calculate how much fluid a small opening pulse in one chamber would achieve. The experimental setup used is a symmetric cylinder connected to four DFCUs. The valve has an opening and closing time of 2 ms due to booster electronics. The initial error is 70 m. The smallest bit executes a 6.3 ms pulse to reduce the error to 4 m. A second pulse then brings the error down to 0.3 m. The authors note that some practical limitations are present if the position overshoots and the controller has to move the cylinder in the other direction. This is due to the static friction force, which was not considered in the controller design.
2.3 Discussion
The conclusion based on this collection of papers is that DFCUs improve hydraulic efficiency only through independent metering control. The flow to each chamber is still throttled which is a major source of losses in hydraulics.
The position accuracy and smoothness of motion offered by the concept is on par or better than standard proportional valves because they are both based on throttling control. The major advantage of the concepts is the improved reliability. Malfunctions are not critical, since multiple components are actuated in parallel. The seat type valves used also reduce the sensitivity to oil cleanliness and leakages. Constant switching between flow levels is not always necessary. Furthermore, some concepts are designed in such a way as to spread the switching load across all the valves. Overall, this is the digital hydraulic architecture that has the smallest switching load. Component-wise the change to multiple smaller, equally sized valves, that have simpler design can even be beneficial in some cases. The reviewed papers contain multiple experimental results, which show that it is possible to achieve good results with current valve technology, and it is ready to be implemented more widely, but it can be argued that the benefits are smaller due to the reliance on throttling control. It can also be noticed that a lot of the papers focus on computational complexity.
3 Single Valve Switching Control
3.1 Concept
Single valve switching control – an alternative digital hydraulics concept – is based on power electronics theory. Instead of using a proportional orifice open to a certain level, a single on/off valve is used. This valve is opened and closed rapidly in order to give an average flow over time using either PWM or Pulse Frequency Modulation (PFM). Only one valve is needed per flow path as seen in Figure 5. This can still be considered throttling control.
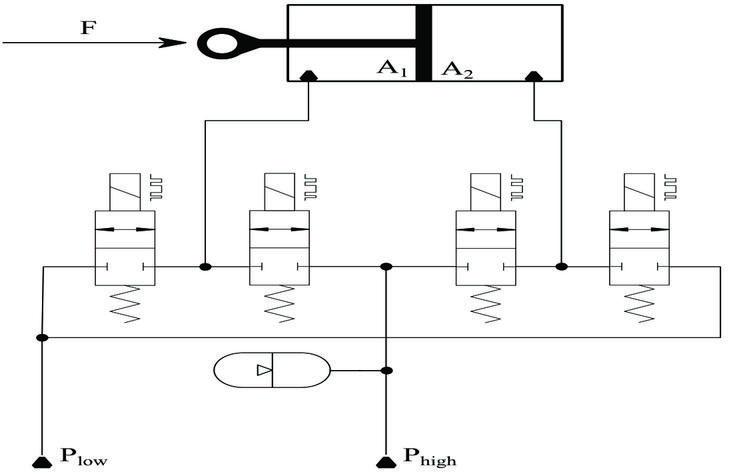
Figure 5 Concept for controlling a cylinder with switching valves.
The idea of using modulation techniques in hydraulics comes down to a simple idea. If a valve can deliver a certain amount of flow in a certain amount of time, then keeping the valve open for a fraction of the time will mean it delivers a fraction of the flow. The inertia and compressibility of the hydraulic fluid, as well as the delay and travel time of the spool complicate this concept. A representation of a duty cycle can be seen in Figure 6. What models and methods to use in order to achieve the concept is a major question in the field.
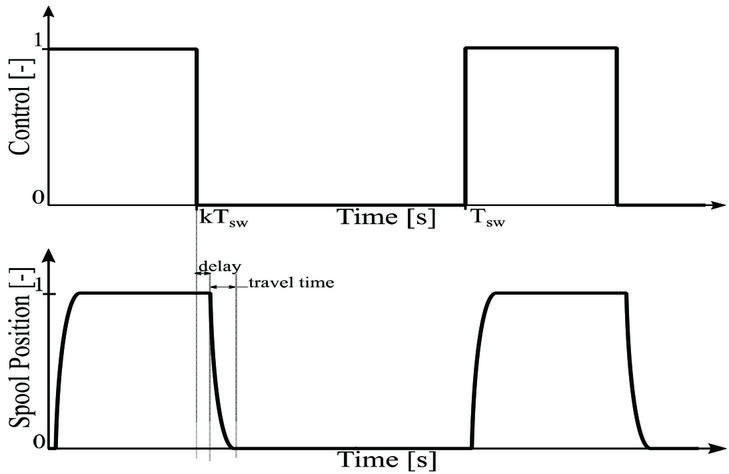
Figure 6 Representation of the concept of duty cycle.
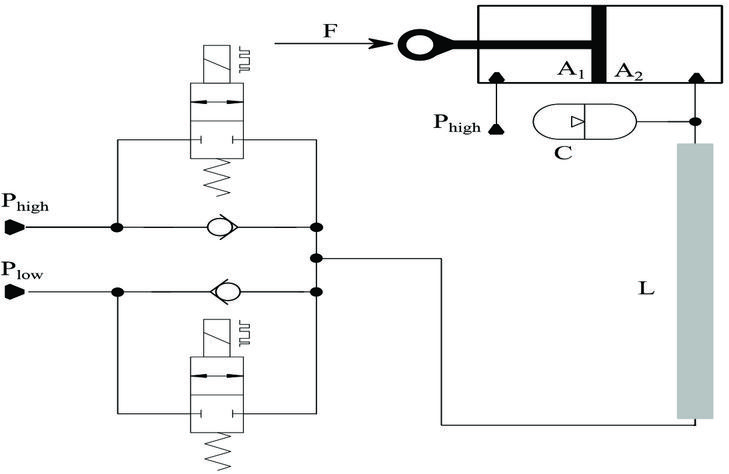
Figure 7 Concept for a Hydraulic Buck Converter (HBC).
The concept can be further augmented by continuing the analogy between electrical systems and hydraulic system. The inertance of the fluid can act as inductance in the system and this can be increase by using long fluid lines. The compressibility of the fluid can act as capacitance. This makes it is possible to realise Buck or Boost converters in a hydraulic system. An illustration of the method can be seen in Figure 7. The concept allows the inertia of the fluid in the long hose to produce a localized pressure drop in front of the check valve. The check valve opens and fluid can be drawn from the low pressure side. The same concept comes into play during retraction and return fluid can be forced back to the supply line. This improves efficiency and allows energy regeneration.
A benefit of these concepts is the possibility of achieving an average flow chosen by a duty cycle according to the well-known PWM technique. The flow resolution of a DFCU is limited by the number of available valves, while the flow resolution of a switching valve is limited by its switching frequency. If the switching frequency is high enough, the duty cycle can be considered a continuous input to the system. These methods have been introduced into DFCUs in order to improve flow resolution without increasing the number of valves.
A disadvantage of the concept is that the valve has to switch constantly in order to achieve any flow level different from the maximum. Furthermore, to achieve good control, the frequency of the valve should preferably exceed the natural frequency of the system by a factor of up to 20 as stated by Gradl et al. [36]. Gradl et al. proposed that several valves can be operated in parallel with a phase shift allowing higher frequencies to be achieved.
The repeated opening and closing of the valves can lead to flow and pressure pulsations. The authors of [36] also propose that instead of modulating the width of the pulse, a specific pulse can be repeated leading to Pulse Count Modulation (PCM). A pulse can be designed such that for a specific system the second pulse removes the oscillations introduced by the first one. Another way to dampen the pulsations is to include an accumulator just before the cylinder as seen in Figure 7. This reduces pulsations, but it also increases the softness of the system. A softer system in this case means a reduce position tracking performance.
The HBC concept greatly benefits from valves, which can open and close very fast. This allows for higher control frequencies. The flow pulsations introduced in the system have less effect if the modulation frequency is high enough. Due to current valve technology limitations, valves have a minimum duty cycle, a maximum modulation frequency and other issues, which researchers are trying to address.
Papers discussing the concept in Figure 4 are described in Subsection 3.2.1. Papers discussing digital hydraulic converters are described in Subsection 3.2.2. The newest development of these concepts have moved into quite complicated control structures to take into account the non-linearity and softness of the system. Another research path has focused on designing converters using a linear model of the system and these papers are described in Subsection 3.2.3. Pressure pulsations have been identified as a major issue with switching control. Most papers in the other three subsections deal with the issue by introducing capacitive elements. Active solutions to the pressure pulsations issue are discussed in Subsection 3.2.4.
3.2 Papers
3.2.1 Replacing proportional valves with switching valves
Tsuchiya et al. investigate the possibility of PWM digital hydraulic control of a table actuated by hydraulic cylinders in [37]. The authors show that it is possible to increase the smoothness of the table’s motion by changing the phase between the valve, which supplies flow to one chamber, and the valve, which drains fluid from the other chamber.
Plöckinger et al. [38] use the same test bench as in [26], but instead of using a mix of DFCU and PWM, they use PWM only. One valve was used for each of the four flow paths. The valves have a response time of 1.8 ms. The minimum duty cycle of the valve was selected based on the PWM frequency in order to avoid ballistic operation of the valve. Thus, higher frequencies resulted in larger minimum duty cycles. This corresponded to worse controllability at small velocities with high PWM frequencies (100 Hz) and better controllability with the lower PWM frequency (25 Hz). The pressure pulsations in the fluid decreased in size with increased PWM frequency i.e. 40 bar at 25 Hz to approximately 10 bar at 75 Hz.
Šimic et al. present the control of a differential cylinder with new digital piezo DPVL-2 valves in [39]. Each of the four flow paths has a valve controlled by PWM. The switching response of the time is below 0.3 ms for 100% control signal. The fast response time of the valve is achieved by actuating it with four piezo elements. The fast valves resulted in improved overshoot and 15% less energy consumed. Unfortunately, the valves are not commercially available.
3.2.2 Converters
Kogler et al. designed and tested a hydraulic buck converter in [40]. Two valves have been used as can be seen in Figure 7. A minimum duty cycle of 20% and a maximum of 60% has been selected at the 100 Hz PWM frequency. The converter charges and discharges an accumulator. The results are compared with those obtained from the same system controlled by a proportional valve. The hydraulic buck converter achieved a 34% reduction in average energy consumption and no significant pressure ripple can be noticed in the measurements.
Kogler et al. present some further developments on the concept in [41]. They identify that the accumulator used to attenuate the pressure introduces softness and non-linearity in the system, which prevents a simpler proportional (P) controller from achieving satisfactory performance. The authors then develop a Flatness Based Controller (FBC) in the second part of the publication [42]. The system can be transformed to a special class of flat system according to the authors. Kogler et al. develop a non-linear observer with a time varying observer gain in order to get full state feedback. The output of the flatness based controller is converted to a duty cycle from the static characteristics of the hydraulic buck converter. The sophisticated control technique allows the hydraulic converter to give the same positional accuracy as the system with the proportional valve and a P controller, but with significantly better efficiency.
The same authors construct a test stand and test the concept in [43]. The results agree with the previous articles – the FBC is more accurate than the P controller and the HBC is more energy efficient than a conventional setup. Pressure oscillations are still a problem for the concept as can be seen in the measurements. This is despite the accumulator at the HBC output, which is meant to attenuate the pressure. Kogler et al. propose that much faster valves would solve the pressure pulsation problems and possibly make the accumulators obsolete, but for the time being, they will research the possibility of using several HBC in parallel.
Scheidl et al. present four cases in which digital fluid system are better solutions compared with the standard one in [44]. Two examples stand out: the control of a gap for rolling mills and the control of mould oscillations. Both of these systems already have low bandwidths making it easier to implement the solution.
Gradl et al. design and manufacture a stepper converter prototype in [45]. The converter is made out of two slave cylinders, which are controlled by fast switching valves. One slave cylinder steps up, meaning that the master cylinder is extended, and one steps down – doing the opposite. The paper also describes the design of a fast switching plate-type check valve and a combined hydrostatic hydrodynamic bearing. These were needed to improve the converter performance. Specifically an improvement in energy efficiency of approximately 15% was seen due to these components. The energy efficiency compared with resistance control of the cylinder was reported as 30% higher.
Lukachev et al. [46] present the building of a prototype of an elementary hydraulic switching control drive concept for heavy load actuation. An analytical model of the transmission line and the cylinder itself is developed according to previous research, and it is further augmented to include the influence of the rod side chamber and the dead volume in the valve block. A laboratory experiment is prepared where a cylinder pushes a 1.5 ton mass. The valves used in the experiment are four Bosch Rexroth WES spool type on/off valves. There are four valves because each line has two valves in parallel. The extra valves are used to increase the apparent switching frequency of the converter as it is seen by the cylinder. The PWM frequency is set to 200 Hz. The authors conclude that the tested switching control drive provided dynamics sufficient for rolling mill actuators and aim to implement the design in a real industrial application.
A gas-loaded accumulator is used in [47] in order to tune the dynamics of the system for a smooth behaviour of the drive. Two PWM valves drive a single acting ram with an attached weight of 500 kg. The accumulator reduces the natural frequency of the drive, so it can still achieve smooth motion even with the valve-imposed limitations on switching frequency. The authors compensate for the added softness with a passivity-based controller. A simulation is conducted in which the PWM frequency was set to 50 Hz. The movement of the cylinder appears to be smooth and the pressure ripple due to switching appears to be below 20 bar. Kogler at et al. mention that in the future experimental work will be done and the influence of line dynamics will be included.
3.2.3 Converter control based on linear models
The performance of hydraulic converters depends on the frequency of the system on which they are applied. Kogler et al. states in [48] that the hydraulic system contains non-linear components, which can make the analysis difficult in the frequency domain alone. The authors propose a mixed time-frequency domain model that needs to be solved iteratively in order to simulate the system with a high degree of accuracy.
De Negri et al. show in [49] that it is possible to use a linear model to predict the average value of the controlled pressure as well as the flow rate in several parts of the system. Nostrani et al. [50] show the design process of a hydraulic step-down switching converter with considerations for the losses in the inertance tube and the switched valve. This is done through a steady state analysis. The results of the analysis are then compared with a non-linear simulation of the system. A hydraulic test rig is used to validate the non-linear simulation. The authors report that when the system was operated in open-loop configuration, the load pressure, the flow rate, and the efficiency predicted by the steady-state model matched the results of the dynamic simulation. According to this, the steady state equation can be used to design hydraulic step-down switching converters.
De Negri et al. present a steady state analysis of a step-down hydraulic converter in [51]. The model is used to calculate the average load pressure and average flow to the system as a function of duty cycle. The theoretical values are compared with experimental results. The minimum and maximum recorded flow rates deviate from the theoretical ones but the average flow rate agrees better.
Nostrani et al. attempt to control a system consisting of two cylinders in [52]. One cylinder is controlled by a conventional proportional valve, while the other is controlled by PWM. The chosen PWM frequency is 32 Hz. The authors find that the valve is not fast enough for position control of the system. During movement the control signal of the valve reached saturation and kept the valve fully opened or closed, which made the losses in the system equivalent to the conventional system. The digital solution resulted in 17% better efficiency, when performing velocity control.
3.2.4 Active damping of pressure pulsations due to switching
Scheidl et al. in [53] point out that one of the major issues with digital hydraulics is still pressure and flow pulsations. Some of the work done in investigating the pressure oscillations due to switching is presented here.
Pan et al. [54] investigate the possibility of attenuating the pressure spikes in a system by active damping. The system consists of a length of pipe with three transducers along the length, a pressure supply on one side and a proportional valve, which can divert flow just before the load, which is in this case a throttling orifice. The method consists of estimating the pressure wave through the pipe by using the transducer measurements and annihilating it by introducing an opposing pressure wave with the valve. This is done at the expense of energy loss. The pressure pulsation frequency is 85 Hz while the proportional valves bandwidth is 350 Hz.
Pan et al. in [55] use a piezo-electric switching valve instead of the proportional valve from the previous test. The control structure is adaptive and it reduces the pressure pulsations significantly. The piezo-electric valve has a bandwidth of 425 Hz, while the pressure pulsations in the system have a maximum frequency of 40 Hz.
Similarly, Kogler et al. investigate the pressure wave propagation due to digital valve switching in [56]. Again, three transducers are used to measure the wave. Instead of using a valve at the end of the pipe, to attenuate the fluid borne noise, the authors investigate the opening trajectory of the switching valve. They find that by using a slower opening or a smoother trajectory the pressure oscillations can be reduced. Kogler et al. further point out that it is possible to design the pipe system in such a way as to force the pressure wave to bounce back from the end of the pipe and annihilate itself.
Peng et al. [57] presents the concept of a zero-flowrate-switching controller. The author uses an extra flow line between the pressure supply and the cylinder chamber, which is specifically designed to resonate at the frequency of the PWM signal. The pressure in the system is supplied by a piston pump, which means that the supply pressure is pulsating with a certain frequency as well. The valve can be switched exactly when there is no flow across it by using the flow waves within the system. The pressure pulsations do not reach the cylinder chamber because at that point the flow is supplied by the second flow line. The resulting switching losses in the system are reduced from 158 W to 1.5 W, but this requires a valve with an opening/closing time of 2 ms.
3.3 Discussion
With regard to accuracy and smoothness of motion it can be said that state of the art control in this field has achieved smooth motion on par with throttling control. The switching load due to this is increased compared with parallel valve solutions, because a constant switching frequency is selected. It can be noticed that papers in the field have focused on systems with a natural frequency of 100 Hz or less. The reliability of this architecture suffers, due to the increased switching load, which does put a lot of strain on the valve. It can be said that having parallel connected converters can improve reliability, because of the added redundancy. This is not clear though, because the apparent switching frequency which the system sees drops with each faulty converter. The load on the valves grows when the natural frequency of the system is increased. The efficiency of systems with hydraulic converters is much improved and this can be said to be the main benefit of the technology. The number of components required to make the concept work is difficult to pin down. Parallel converters or switching valves seem to be needed in order to actuate systems with a steady motion. Each converter requires a state of the art switching valve, a long hose and possibly an accumulator. At the same time fewer valves are needed. The computational complexity of the controllers in this field are not high compared with those used in the other fields. This is due to the fact that no optimization problem needs to be solved at each instant. The active damping of pressure pulsations presented in subsection 3.2.4 seems to be impossible as of yet, because the valves used to attenuate the vibrations are in the 400 Hz bandwidth range and this is not possible with commercially available valves.
4 Multi-pressure Actuators
4.1 Concept
Multi-pressure actuators work on a similar principle as multi-chamber chamber cylinders in the sense that they are controlled by switching between different force levels. A differential cylinder is connected to different pressure lines in order to achieve different force outputs. Multi-pressure systems with only three pressures were proposed first. The low number of pressure lines required that throttling was still used in order to achieve any controllability. Seven or more pressures might be needed in order to achieve good controllability without throttling. Since switching losses scale with the difference between the initial and final pressure, having many pressure lines can greatly reduce losses. A pressure transformer was proposed by [58] in order to create these many pressure lines. One high pressure rail is connected to the rod side chamber of a row of small cylinders as can be seen in Figure 8.
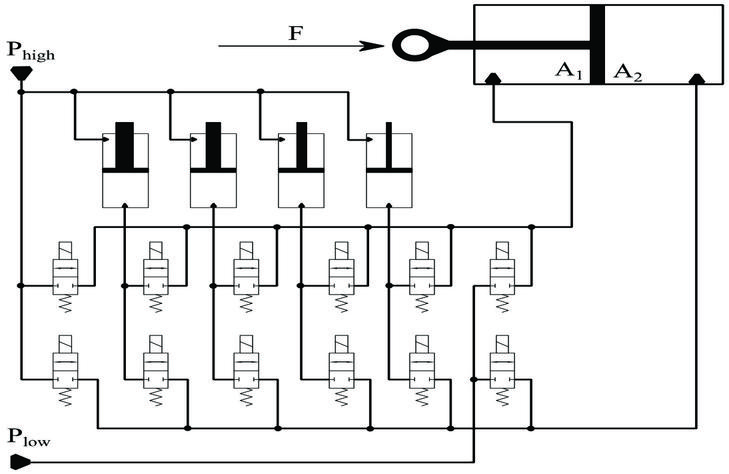
Figure 8 Concept for a multi-pressure cylinder with 6 pressures.
The ratio between piston and rod side produces different pressures in the piston side chamber. These chambers are used as the constant pressure rails. The prototype in [58] was built with rather small cylinders for the pressure line. The pistons of these cylinders move when fluid is extracted from the pressure rail. Care needs to be taken not to drain too much fluid from a single pressure rail, because this reduces the resolution of the controller.
There are few papers available for the digital concept of switching between multiple pressure lines. The following subsection has not been further divided for this reason. The main advantages of the concept is its energy efficiency and so most papers are concerned with that. The main problems to be solved are how to balance energy flows from pressure lines to cylinder chamber, how to achieve smooth motion despite the switching nature of the control and the computational complexity of the controller.
4.2 Papers
Dengler et al. [59] propose to use multiple pressure lines in the control of a linear actuator in a wheel loader. The middle pressure line is supplied by an accumulator. The control structure is based on a model prediction algorithm, which attempts to optimise the energy consumption of the pump. In the cost function, extracting energy from the high pressure line without charging the medium pressure line has a prohibitive cost. The state equations for all control combinations are solved and the two energies in the two pressure rails are calculated for the next time step. The authors then use a proportional valve and throttle the flow to get the correct chamber pressures. The article shows that the resulting controller is 13% more efficient than a load sensing solution.
Stauch et al. propose the use of a digital hydraulic inspired accumulator to store and recover energy in [60]. The accumulator has a multi-area piston type design. The top part is filled with gas, which is the spring as in a conventional accumulator, but the bottom part consists of several concentric annular areas with different sizes. Each area can be switched between a load port and a low pressure port. This makes the accumulator function in a manner similar to a multi-chamber cylinder. The authors simulate a case in which a cylinder moving a weight is used. The weight is first lifted. This discharges the accumulator. Then the weight is lowered which charges the accumulator. The weight is then lifted again but it does not reach the same height due to the throttling losses and the friction in the system.
A three-pressure multi-pressure actuator is investigated in [61]. A state-space representation of the system is obtained and used to find a Linear Quadratic Regulator (LQR), which controls force and back pressure by outputting flow references for the two cylinder chambers. A set of switching rules are defined based on the available pressures and the possible flow directions (i.e. flow from low to high pressure is not possible). Then the inverse valve model is used to realize the flow reference set by the LQR. The switch happens over a period of 100 ms in order to avoid any flow spikes during switching between pressure lines. Both pressure lines are connected to the cylinder at 50 ms and are each providing half of the flow. The resulting energy use was reduced by 49.3% on average for the six test cases, despite the fact that cross-port leakage occurs. The reduction in question is in comparison with the same system using two pressure rails.
Linjama et al. [62] discuss the possibility of combining the energy storage concept from [59] together with the multi-chamber accumulator [60] or a secondary controlled multi-chamber cylinder. The idea is to have an energy storage unit providing the peak power for each actuator as opposed to a unified energy storage solution. This reduces the need to transfer large power quantities from the main power storage to each actuator. The energy peaks are handled locally at the actuators instead. A further benefit is that the energy storage for each actuator can be designed separately. The size and pre-charge of the accumulator influence the efficiency of the system as discussed in [63]. This information is used to conclude that designing multiple actuators with different loading conditions and a single storage system can be difficult. The main issue with both the proposed solutions in [62] is the size of the accumulator. Larger accumulators will be able to supply the system better, but they are bulkier. Smaller accumulators can furthermore have problems with heat dissipation due to the smaller amount of fluid in the system.
A two chamber cylinder is controlled by switching between multiple pressure lines in [58]. Huova et al. propose 100 pressure lines instead of the more common three. A more realistic prototype with 7 pressure lines is tested. The authors compare the energy losses with those of a four-chamber cylinder. The losses are 3.5 kJ for the multi-chamber cylinder and 2.49 kJ in for the multi-pressure cylinder.
Huova et al. [64] study a multi-pressure actuator to drive a mobile hydraulic boom mock-up. The authors consider the possibility of opening one or two valves between a chamber and a pressure line. This changes the maximum flow capacity of the valve and so changes the force resolution at velocities different than zero. They also consider the possibility of allowing crossflow between pressure lines. The authors find that at low velocities only changing the number of valves opened does not improve the resolution. Both PNM and crossflow have to be allowed in order to get good resolution. The inclusion of crossflow does produce losses, but the authors have removed the most costly combinations. The experimental results show an average energy loss over movement distance between 10 and 14 J/mm depending on the controller and the loading conditions. Huova et al. study the source of the power losses in the system and find that 65% are due to the on/off valve.
Linjama et al. develop a force controller for a multi-pressure cylinder in [65]. The system has six possible pressures to choose from, but each line has two valves connected in parallel. Two chambers, six pressures lines and two valves per line result in 24 valves and 2 combinations. The two valves connected to each chamber do not have different sizes, so opening either one is equivalent to opening the other. The total number of unique combinations is 28, because there are two chambers. A cost function is used to evaluate the control combinations by enumerating all of them. The system is experimentally tested on a seesaw bench reported in other papers. The energy efficiency measure was comparable with the results of a multi-chamber cylinder actuating the same test stand.
Linjama et al. collect results and reflect on a 2-year research project for the improvement of fuel efficiency in hydraulic working machines in [66]. The main finding of the project is that hybridization can reduce fuel consumption by 15%. The most effective solution is the combination of independent metering and hybridization where a 28% reduction is seen. It is noted that multi-pressure systems have the potential to reduce fuel consumption by 36%. The inertia of the luffing and extension joints was too low for the system to be implemented, so they used a standard load sensing system with 4/3 proportional valves for those two actuators. The multi-pressure system was only implemented on the swing and lift actuators.
4.3 Discussion
The results for multi-pressure cylinder and multi-chamber cylinders are very similar. Accuracy and smoothness of motion depends on the mass of the system and the force resolution. Energy efficiency is the main advantage of the architecture and results show that multi-pressure cylinders can be more efficient than multi-chamber cylinders. The switching losses can be reduced by both having smaller differences between pressure levels and by having smaller chambers in which the change happens. Switching frequency is not constant and is in general smaller than with a hydraulic buck converter. The number of components needed to make the concept work is rather high as in multi-chamber cylinders. A three-chamber three-pressure cylinder requires 12 valves, while a two-chamber, seven-pressure cylinder requires 14. Since the pressure lines are created locally at the cylinder itself, each actuator would require a transformer and having multiple multi-pressure cylinders does not reduce the number of needed components.
5 Multi-chamber Cylinders
5.1 Concept
Multi-chamber cylinders are hydraulic cylinders with more than two chambers. The authors in [67] explain that using the same constant pressure in different chambers produces different force levels. This can allow the four quadrant secondary control of a multi-chamber cylinder.
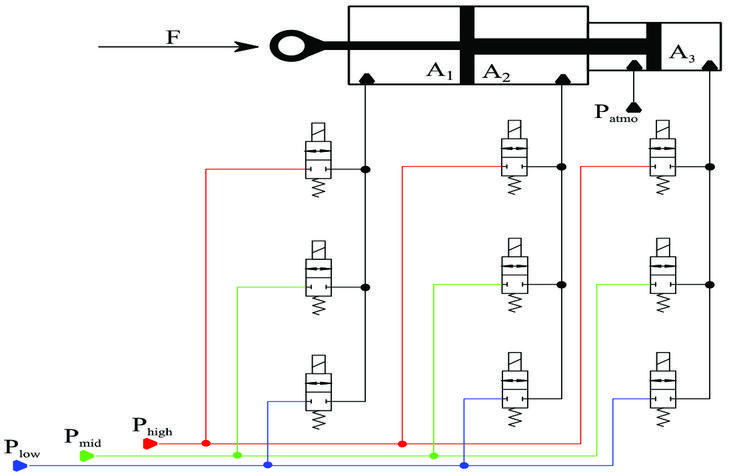
Figure 9 Cylinder used in Wavestar prototype.
In Figure 9, a multi-chamber cylinder with four chambers can be seen. In the figure, only three chambers are used. The fourth chamber is vented to tank. The cylinder can be connected to three pressure levels by a bank of on/off valves. The resulting force level the cylinder is able to produce can be seen in Figure 10. The resolution of the force depends on the number of chambers and number of pressure lines, which are available. A four-chamber cylinder with two pressure lines can produce forces, a three-chamber cylinder with three pressure lines can produce 3 forces, and a four-chamber cylinder with three pressure lines can produce forces. More combinations can result in better performance, but it also necessitates more components and it makes choosing a force level more difficult.
A force trajectory can be followed by switching between these force levels. Since the valves are always on or off, there is no throttling. The multi-chamber cylinder is a different way of creating a hydraulic converter, but instead of modulating the flow, the pressures are being modulated. The major source of losses in the system is switching, as the fluid in the chamber has to be compressed and decompressed depending on the case. Some authors propose throttling control as an inner loop of the force controller. That is – a force level above the reference is chosen and then the minimum amount of throttling is used to reach the force reference.
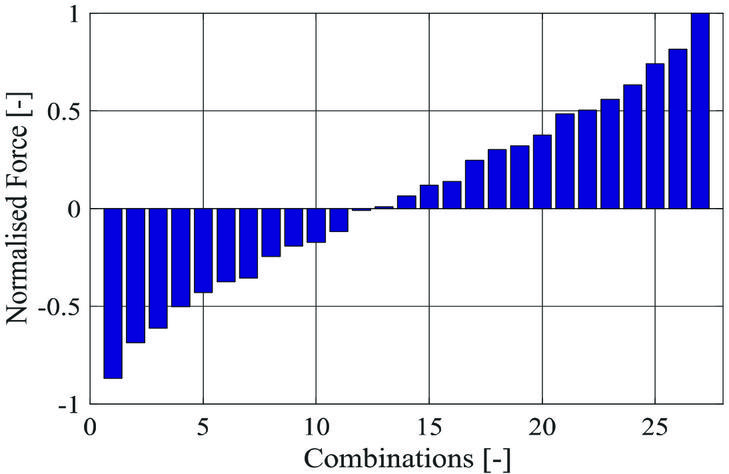
Figure 10 Normalised force levels, which a three-chamber cylinder with three pressure lines can produce.
5.2 Papers
5.2.1 Multi-chamber cylinders with two pressure lines
The cylinder under consideration in [67] has four chambers with binary coding ratios. The chambers are either connected to a high-pressure or low-pressure line. Since there are four chambers and two pressure levels the actuator can provide 16 discrete force levels. The control structure optimises a cost function for the minimum force error while penalising excessive switching. The experiments show that a secondary controlled multi-chamber cylinder can have 60% less losses than a standard proportional valve and cylinder solution. The authors identified the compressibility losses as the largest source of losses in the multi-chamber cylinder solution. Linjama et al. [67] also point out that the controllability at low velocities or with small system inertias is poor.
Huova et al. [68] used a three-chamber cylinder with two pressure levels, but instead of on/off valves the system has DFCUs, which are used to control the velocity of the cylinder. It can be seen from the results that the velocity tracking is improved. The losses are still on average 60% lower than for a standard load sensing system. The authors point out that if the cylinder is supposed to drive overrunning loads a higher load pressure is needed and then the losses are only 33% smaller compared with a load sensing system. The reduction in losses is 50%, if the hoses are excluded from the simulation and the chamber area ratio is changed.
Hansen et al. also optimise the chamber sizes of a four-chamber cylinder in [69] and determine that efficiency can be increased if the loading conditions are known.
Belan et al. [70] investigate the possibility of using secondary controlled multi-chamber cylinder in aviation. The authors have developed a procedure for selecting cylinder areas.
Linköping University and Volvo Construction Equipment discuss the possibility of using digital hydraulics to improve the efficiency of a mobile hydraulic machine in [71–73]. The concept utilises two constant pressure rails. The wheel loaders work functions are realised with multi-chamber cylinders. DFCU’s are proposed for connecting the pressure rails to the chambers in order to efficiently control the transition from one force level to another. The authors propose a model based controller (MPC) for the cylinders. Heybroek et al. [73] focus on the MPC of a multi-chamber actuator. The simulation results show a 5% force error over 99% of the cycle time. The overall energy efficiency is 71%. The authors state that the controller requires a bandwidth of 1 kHz, but 100 Hz is the common capability of the electrical control units used in the excavator industry.
5.2.2 Multi-chamber cylinders with multiple pressure lines
Hansen et al. investigate the compressibility losses in [74] and [75]. The authors point out that when shifting from one pressure level to another, the pressure will overshoot the desired level due to the pressure dynamics. Hansen et al. propose that it is possible to introduce an intermediate pressure level. Thus the initial shift will result in a smaller energy loss, since the pressure drop across the valve will be smaller. When the overshoot reaches its maximum, the desired pressure level is introduced. Since at the time of the shift the new pressure level is equal to the system pressure, the energy loss would be zero. A minimum valve performance requirement to make such shifts possible has been established in [76].
The work in [74–78] used a multi-chamber cylinder with three pressure lines to extract energy from waves. They achieved a 90% efficiency over multiple operating conditions.
Hansen et al. [79] present a test bench representing a part of the wave energy extractor presented in [78]. The authors faced a control problem as the fast switching time of the on/off valves resulted in under-damped chamber pressure responses. Hansen et al. stagger the opening of the valve over the opening period in order to avoid the pressure overshoot or cavitation. An optimal opening trajectory is proposed. In order to follow the trajectory a parallel valves solution is used.
Hansen et al. [80] further show that small shifting times lead to a better efficiency of the system, but they can also lead to larger pressure oscillations in the cylinder chambers. The optimal shifting time depends on the size of the chamber, which in turn depends on the current stroke of the cylinder. The authors proposed selecting opening times for every chamber as a trade-off. The authors then further expanded on their work in [81], where they investigate the influence of a box flow and a cosine flow shape. The conclusion is that the cosine input flow produces less oscillation, because it has a smoother shape and has a longer shifting time.
Dell’Amico et al. use a four-chamber cylinder and three pressure lines in [82]. The resulting structure can produce 81 different forces. The control structure consisted of a PI controller in the outer loop, which outputs the desired force reference. The force reference was compared with the possible steady state forces and the closest match was selected. The smoothness of the motion was improved by using a smaller load and placing a weight on unnecessary switching. When a larger weight was used the pressure to the larger chambers was switched, which resulted in larger fluctuations in velocity.
Niemi et al. attempt to use a multi-chamber cylinder together with a multi-pump approach in [83]. The cylinder has four chambers which can be connected to supply or load pressure. Instead of using a constant pressure rail, the authors have connected three pumps with different displacements to the same motor shaft. The pumps can pump either to the supply line, or directly to tank. This changes the flow output of the pumps. There are three pumps with binary coded displacements and four cylinder chambers, which results in 106 force-velocity combinations. The results showed several problems with the system. Since the supply pressure is dictated by the load force, when the cylinder is stopped against the load force, the supply pressure would rise to the demands of the load. If the cylinder then has to move in the opposite direction (with the load force) the high pressure would result in a velocity surge. The energy efficiency of the system is compared with other control structures on a similar setup. The system is more efficient than a proportional solution with a load sensing system, but not as efficient as [67].
Hansen et al. [84] investigate the performance of a Force Selection Algorithm (FSA) and a Model Predictive Controller (MPC) algorithm for solving the tracking problem of a multi-chamber cylinder, while minimizing energy use. Two MPC algorithms are investigated and are compared to the FSA. The cylinder used has three chambers and three pressure lines. The middle pressure line’s level is chosen as the average of the high and low pressures. The cylinder is pushing against a spring damper system. The time horizon of the MPC was varied from 0.2 to 0.8 s and the time step from 0.1 to 0.5 s respectively. The parameters chosen are 0.5 s and 0.1 s. In order to compare the algorithms, they were tuned so they have less than 3 mm mean squared error over the trajectory. The computation time for the MPC controllers where 38 s and 327 s, values much larger than the 0.5 s horizon. The results indicate that the energy efficiency of a position tracking multi-chamber cylinder can be improved significantly by using the MPC algorithm.
Donkov et al. [85] investigate the energy saving potential of using a multi-chamber cylinder to actuate the inner jib of a knuckle-boom crane. A three-chamber cylinder is used along with three pressure lines in the simulation. The controller is based on a simple FSA, where all switching is punished with the same weight without regard for actual losses involved. A parameter sweep is performed to find the optimal weight and the optimal pressure for the mid pressure line, showing that the controller can perform better if the force levels are tailored to the load and the trajectory. A second controller is presented which has a large weight on the two valves, which connect chamber A and chamber B to high pressure. The two controllers showed close performance with regard to accuracy and energy efficiency, but at the same time, they exhibited different switching patterns. One controller would follow the force trajectory closer and switch less often, while the other switched more often to forces above and below the actual trajectory. The original controller which followed the force trajectory more closely had large force spikes during switching. The force controllers were compared to a traditional hydraulic system – a mobile hydraulic proportional valve and a constant pressure supply. The proportional valve achieved a root mean square (RMS) error of 2 mm while the force controller achieved 74 mm at best. At the same time the energy used was 0.89 MJ versus 0.22 MJ for the force controller.
Hansen et al. [86] investigate how a new MPC algorithm can lead to a significant increase in the harvested power of a wave energy converter with discrete fluid power take-off system. The discrete power take-off system is a three-chamber cylinder with three pressure lines. The losses considered in the MPC are losses due to switching and throttling losses associated with the displacement flow. The influence of the time horizon and the time step size on the controller are investigated. The authors report that average absorbed power increases when the prediction horizon is increased, but the gains flatten out in horizons longer than 4 s. The authors also report that average absorbed energy decreases as time step grows. In practice, a value of 200 ms was chosen, because it takes 50 ms for the pressure shift to occur in the chamber. These dynamics are omitted in the MPC, because they are assumed to happen much faster than the time step. Three cost functions are tested – one without losses, one with switching losses, and one with switching and throttling losses. Harvested power was largest in all tests with the third cost function.
Donkov et al. [87] discuss the possibility of using MPC to control the multi-chamber cylinders actuating a realistically sized crane. This is a simulation study only. A large weight is added to the load, after both inner and outer jibs are extended, to simulate the crane picking up something heavy. The FSA and the MPC are compared against a system with a load sensing pump, proportional valves, and normal cylinders. It is shown that the MPC performs better than the normal cylinders and the FSA in terms of energy efficiency. It is also shown that the large change in weight causes a constant error in the MPC and furthermore reduces its energy efficiency. This is found to be due to the change in the model, which is not reflected in the algorithm.
Hansen et al. investigate the long term effect of valve shifting time on a mechanical structure driven by a multi-chamber cylinder in [88]. A three-chamber, three-pressure cylinder is controlled with a FSA. The simulation is run for 100 wave periods and the force shifts are recorded. These force shifts are converted to an equivalent fatigue load using Miners rule. The results show that harvested energy decreases with increasing valve shifting time, but the fatigue load generally decreases.
Hansen et al. conduct a hardware-in-the-loop validation of a MPC controlled multi-chamber cylinder in [89]. The test bench is two cylinders pushing against each-other. One simulating a wave load, while the other simulates the power take-off system of a wave energy converter. Five different cost functions are compared in terms of energy efficiency, but also in term of computation time. The more complicated cost functions took longer to compute, but also extracted more energy. The least complicated cost function took 16 ms, while the most complicated took 85 ms. In both cases this was below the MPCs prediction horizon, meaning that it is possible to run these controllers in real time.
Donkov et al. [90] investigate a fault-tolerant MPC. A seesaw test bench was driven by a three-chamber, three-pressure cylinder. The faults investigated where valves stuck closed and valves stuck open. A simulation study was performed in which the system was investigated with and without a fault tolerant controller. It was shown that in general valves stuck closed produce a smaller effect on the system. Furthermore, the system can operate normally if the fault is detected. The effects were much larger in the case where valves are stuck open – often resulting in an inability to move the cylinder. Two cases were tested on the test bench to validate the simulations, but modelling errors and undiscovered faults gave inconclusive results.
5.2.3 Multi-chamber cylinders for exoskeletons
A digital cylinder drive is studied for a knee joint of an exoskeleton in [91]. A four-chamber cylinder is used and the aim is to examine the jerkiness of the motion due to force transitions, when the system is used for getting up from a crouching position. The multi-chamber cylinder is made up of three differential cylinders connected in parallel. Only two pressure lines are used. The valves used are 3/3 two-way switching valves. This reduces the number of valves from eight to four. The control structure is described as a simple model predictive controller. The initial and desired angle of the leg are used to compute a position, velocity and acceleration trajectory for the cylinder. It is noted that valve size is a problem as the ones used in the simulation would have to be attached to the upper body. A different trajectory – fast walking, and experimental results are suggested as future work.
Scheidl et al. [92] continue the investigation of a multi-chamber cylinder for the knee joint of an exoskeleton. In this case the focus is on the valves system. In order to reduce the size and weight of the four valves, they are changed from electrically actuated to pilot pressure actuated. The pilot pressure for the four valves is controlled by one proportional valve. Moving the spool of the one valve causes the pilot pressure to change and the four valves to switch states making this a hydraulic binary counter. These valves switch from one state to another in 50 ms, but the authors claim that this can be reduced by changing the switching trajectory.
5.2.4 Discussion
Multi-chamber cylinders rate lower than throttling based approaches such as parallel valves, in terms of accuracy and smoothness of motion. The actual performance depends on the size of the system, the trajectory and the available force levels. The switching frequency and the switching events can be reduced compared with the switching valve or the hydraulic buck converter concepts. The reduced switching load can also lead to improved reliability. Furthermore, the components operate in parallel, so it is possible to avoid using faulty components without affecting the system. The efficiency of multi-chamber cylinders can be considered their main advantage with proven efficiency of the cylinder of 98% in multiple loading conditions. This efficiency can be destroyed though by the inefficiency of the pressure rails if they are not constructed in a smart way (e.g. throttling a high pressure rail in order to create a medium pressure rail). The concept does not require many components – each chamber requires a number of valves equal to the number of pressure rails. Pressure rails may require multiple pumps, accumulators and possibly significant length of hose. This can be offset if the pressure lines supply multiple actuators. The multi-chamber cylinder itself can be costly as it is a more complicated component than a differential cylinder. In terms of control the current trend is towards MPC over FSA. The computational complexity associated with MPC is an issue.
Table 1 Result of state of the art review
| Parallel | Switching | Multi-chamber | Multi-pressure | |
| Valves | Valves | cylinders | cylinders | |
| Accuracy | ||||
| Energy efficiency | ||||
| Switching | – | – | – | |
| Extra Components | – | – | ||
| Computational Complexity | – | – | ||
| Robustness | – |
6 General Conclusion
The general conclusion for these concepts is presented in table form in Table 1. Pluses and minuses have been assigned to each category. A denotes either average result or that the result depends on how you implement the technology. Simple pluses and minuses do not represent the full reality of the differences between technologies and furthermore subjectivity cannot be avoided, but the table can be used to give an estimate of the subject area. The mobile-hydraulic industry in particular has so far shown the largest interest in digital hydraulics, specifically Bosch-Rexroth and Volvo, which have collaborated on some of the papers cited e.g. [72, 93].
In terms of accuracy parallel valves and switching valves have been given very good results. This is a reflection of the fact that parallel valves can use throttling and micro-positioning with single pulses. Papers concerning switching valves also report accurate smooth motion with the complex flatness based controllers. The other two concepts get average results, because most papers in these fields focus energy efficiency more.
Multi-pressure cylinders and by extension multi-chamber cylinders with multiple pressure lines are very efficient and as such are given the highest mark in this category. Switching valves are given a good result, because the field contains both HBC and throttling based concepts. Parallel valves are given an average result, because they still rely on throttling control. They are more efficient that a standard proportional valve solution, because they can throttle the flows to the cylinders chambers separately.
Concerning switching, parallel valves require the least amount of it. The concept controls velocity directly and with possible cross-port leakage good resolution can be achieved with relatively few valves. Multi-chamber and multi-pressure cylinders require switching between forces in order to follow a trajectory, but the control structures try to punish this. That is to say switching will only occur when it is needed. A constant switching frequency is used to the PWM controllers in the case of switching valves. For this reason, switching valves are given the worst score.
Multi-pressure cylinders are given the worst score in the “Extra components” category, because they require a transformer for each cylinder. Multiple multi-chamber cylinders can be actuated from the same pressure rail. Switching valves are given an average result, because HBC require extra check valves and hoses, but at the same time, two valves might be enough to actuate a cylinder.
Multi-pressure and multi-chamber cylinders receive low scores in computational complexity, because the field seems to be moving towards the use of MPC. Depending on the prediction horizon, this can be quite complex. No computational problems have been reported in the field of switching valves and multiple papers address the computational complexity of parallel valve controllers.
Parallel valves receive the highest grade in terms of robustness, since all the valves are essentially equal. Multi-pressure and multi-chamber cylinders have some valves that can be more important i.e. those connecting to the low-pressure line. Switching valves incur the highest switching load and based on that have been given the lowest grade.
A trend can be seen in the field of parallel valves towards reducing the number of valves. This is achieved by adding more switching. The trend in the field of switching valves seems to be to incorporate multiple HBCs in parallel. Increasingly complicated control structures are receiving more attention in both fields, when compared with physical changes to concept or architecture.
The field of multi-chamber cylinders is moving towards MPC and trying to solve the computation problem associated with it. The field of multi-pressure cylinders is still new and not enough papers are present in order for a trend to be detected, though it can be expected that the field will follow the others and control strategies will receive more attention.
Acknowledgments
This research was funded by the Research Council of Norway, SFI Offshore Mechatronics, project number 237896/O30.
References
[1] M Sc Arto Laamanen and Matti Vilenius. Is it time for digital hydraulics. In The eighth Scandinavian international conference on fluid power, 2003.
[2] Rudolf Scheidl, Matti Linjama, and Stefan Schmidt. Is the future of fluid power digital? Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 226(6):721–723, 2012.
[3] Bernd Winkler. Recent advances in digital hydraulic components and applications. In Proc. of The Ninth Workshop on Digital Fluid Power, Aalborg, Denmark, 2017.
[4] Valmet. Digital hydraulics, 2016. [Online]. Available: https://www.valmet.com/globalassets/media/downloads/whitepapers/process-improvements-and-parts/wppdigihydraulics.pdf
[5] Matti Linjama. Digital fluid power: State of the art. In 12th Scandinavian International Conference on Fluid Power, Tampere, Finland, May, pages 18–20, 2011.
[6] Matti LINJAMA, Kari T KOSKINEN, and Matti VILENIUS. Pseudo-proportional position control of water hydraulic cylinder using on/off valves. In Proceedings of the JFPS International Symposium on Fluid Power, volume 2002, pages 155–160. The Japan Fluid Power System Society, 2002.
[7] Matti Linjama, Kari T Koskinen, and Matti Vilenius. Accurate trajectory tracking control of water hydraulic cylinder with non-ideal on/off valves. International Journal of Fluid Power, 4(1):7–16, 2003.
[8] Matti Linjama, Mikko Huova, Pontus Boström, Arto Laamanen, Lauri Siivonen, Lionel Morel, Marina Waldèn, and Mati Vilenius. Design and implementation of energy saving digital hydraulic control system. In Proceedings of the 10th Scandinavian International Conference on Fluid Power, Tampere , Finland, 2007.
[9] M Linjama and M Vilenius. Digital hydraulic control of a mobile machine joint actuator mockup. In Bath Workshop on Power Transmission and Motion Control, volume 2004, page 145. Professional Engineering Publishing, 2004.
[10] Matti Linjama and M Vilenius. Improved digital hydraulic tracking control of water hydraulic cylinder drive. International Journal of Fluid Power, 6(1):29–39, 2005.
[11] Matti Linjama and Matti Vilenius. Energy-efficient motion control of a digital hydraulic joint actuator. In Proceedings of the JFPS International Symposium on Fluid Power, volume 2005, pages 640–645. The Japan Fluid Power System Society, 2005.
[12] L Siivonen, M Linjama, M Vilenius, and P Anttonen. Accurate flow control with digital valve system. In Proceedings of the 51st National Conference on Fluid Power March 12-14, 2008, IFPE 2008, Las Vegas, USA, 2008.
[13] Matti Linjama. Robust control of digital hydraulic servo actuator.
[14] Matti Linjama, Mikko Huova, and Kalevi Huhtala. Model-based force and position tracking control of an asymmetric cylinder with a digital hydraulic valve. International Journal of Fluid Power, 17(3):163–172, 2016.
[15] Matti Linjama, Mikko Huova, Otso Karhu, and Kalevi Huhtaka. Energy efficient tracking control of a mobile machine boom mockup. In The Eight Workshop on Digital Fluid Power, Tampere, Finland, May, pages 268–278, 2016.
[16] Matti Linjama, Mikko Huova, Otso Karhu, and Kalevi Huhtala. High-performance digital hydraulic tracking control of a mobile boom mockup. In The 10th International Conference on Fluid Power, Dresden, Germany, March, pages 37–48, 2016.
[17] Matti Linjama. On the numerical solution of steady-state equations of digital hydraulic valve-actuator system. In The Eight Workshop on Digital Fluid Power, Tampere, Finland, May, pages 144–155, 2016.
[18] Matti Linjama and Mikko Huova. Numerically efficient flow model for on/off valves. In The Seventh Workshop on Digital Fluid Power, Linz, Austria, February, pages 164–172, 2015.
[19] C Stauch, J Rudolph, and F Schulz. Some aspects of modelling, dimensioning, and control of digital flow control units. In Proc. 7th Workshop on Digital Fluid Power, DFP15, Linz, Austria, pages 101–113, 2015.
[20] Christian Stauch and Joachim Rudolph. Control-oriented modelling and development of a model-based switching algorithm for a digital hydraulic independent metering cylinder drive. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, page 0959651816629315, 2016.
[21] Mikko Huova, Miika Ahopelto, Ville Ahola, Matti Linjama, and Kalevi Huhtala. Characteristics of digital hydraulics with commercial controllers. In The Seventh Workshop on Digital Fluid Power, Linz, Austria, February, pages 114–128, 2015.
[22] Johan Ersfolk, Pontus Bostrlöm, Ville Timonen, Jam Westerholm, Jonatan Wiik, Otso Karhu, Matti Linjama, and MarinaWaldèn. Optimal digital valve control using embedded gpu. In The Eight Workshop on Digital Fluid Power, Tampere, Finland, May, pages 239–250, 2016.
[23] Miikka Ketonen and Matti Linjama. High flowrate digital hydraulic valve system. In Proc. of The Ninth Workshop on Digital Fluid Power, Aalborg, Denmark, 2017.
[24] Miikka Ketonen and Matti Linjama. Simulation study of a digital hydraulic independent metering valve system on an excavator. In Proceedings of 15th Scandinavian International Conference on Fluid Power, June 7–9, 2017, Linköping, Sweden, number 144, pages 136–146. Linköping University Electronic Press, 2017.
[25] Miikka Ketonen and Matti Linjama. Digital hydraulic imv system in an excavator–first results.
[26] M Huova and A Plöckinger. Improving resolution of digital hydraulic valve system by utilizing fast switching valves. In: Laamanen, A. & Linjama, M.(eds.). Proceedings of the Third Workshop on Digital Fluid Power, October 13–14 2010, Tampere, Finland, 2010.
[27] M Paloniitty, M Linjama, and K Huhtala. Equal coded digital hydraulic valve system-improving tracking control with pulse frequency modulation. Procedia Engineering, 106:83–91, 2015.
[28] Miika Paloniitty and Matti Linjama. High-linear digital hydraulic valve control by an equal coded valve system and novel switching schemes. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 232(3):258–269, 2018.
[29] Lauri Siivonen, Miika Paloniitty, Matti Linjama, Harri Sairiala, and Salvador Esqué. Digital valve system for iter remote handling–design and prototype testing. Fusion Engineering and Design, 2019.
[30] Lauri Siivonen, Matti Linjama, Mikko Huova, and Matti Vilenius. Pressure based fault detection and diagnosis of a digital valve system. Power Transmission and Motion Control (PTMC 07), pages 67–79, 2007.
[31] A. Laamanen, M. Linjama, and M. Vilenius. On the pressure peak minimization in digital hydraulics, pages 107–121. Tampere University of Technology, 2007. Contribution: organisation=iha, FACT1=1.
[32] Lauri Siivonen, Matti Linjama, Mikko Huova, and Matti Vilenius. Jammed on/off valve fault compensation with distributed digital valve system. International Journal of Fluid Power, 10(2):73–82, 2009.
[33] T Laehteenmaeki, M Ijas, and E Mäkinen. Characteristics of digital hydraulic pressure reducing valve. In: Johnston, DN & Plummer, A.(eds.). Fluid Power and Motion Control (FPMC 2010), 15–17 September 2010, University of Bath, UK, 2010.
[34] M. Ketonen, M. Huova, M. Heikkilä, M. Linjama, P. Boström, and M. Wald’en. Digital hydraulic pressure relief function. In ASME/BATH 2012 Symposium on Fluid Power and Motion Control, pages 138–151. American Society of Mechanical Engineers, 2012.
[35] Mikko Huova, Matti Linjama, Lauri Siivonen, Till Deubel, Heino Försterling, and Edgar Stamm. Novel fine positioning method for hydraulic drives utilizing on/off-valves. In BATH/ASME 2018 Symposium on Fluid Power and Motion Control. American Society of Mechanical Engineers Digital Collection, 2018.
[36] Christoph Gradl and Rudolf Scheidl. A basic study on the response dynamics of pulsefrequency controlled digital hydraulic drives. In ASME/BATH 2013 Symposium on Fluid Power and Motion Control, pages V001T01A022–V001T01A022. American Society of Mechanical Engineers, 2013.
[37] Sojiro Tsuchiya, Hironao Yamada, and Takayoshi Muto. A precision driving system composed of a hydraulic cylinder and high-speed on/off valves. International Journal of Fluid Power, 2(1):7–16, 2001.
[38] Andreas Plöckinger, Mikke Huova, and Rudolf Scheidl. Simulation and experimental results of pwm control for digital hydraulics. In Proceedings of The Fifth Workshop on Digital Fluid Power, Tampere. The Digital Fluid Power Workshop series, 2012.
[39] Marko Šimic and Herakovič. High-response hydraulic linear drive with integrated motion Sensor and digital valve control. In The 10th International Conference on Fluid Power, Dresden, Germany, March, pages 49–58, 2016.
[40] Helmut Kogler, Rudolf Scheidl, Michael Ehrentraut, Emanuele Guglielmino, Claudio Semini, and Darwin G Caldwell. A compact hydraulic switching converter for robotic applications. Proc. Fluid Power and Motion Control, September, Bath, pages 55–66, 2010.
[41] Helmut Kogler and Rudolf Scheidl. Linear motion control with a low-power hydraulic switching converter-part i: Concept, test rig, simulations. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 229(8):677–684, 2015.
[42] Helmut Kogler and Rudolf Scheidl. Linear motion control with a low-power hydraulic switching converter-part ii: Flatness-based control. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 229(9):818– 828, 2015.
[43] Helmut Kogler and Rudolf Scheidl. Energy efficient linear drive axis using a hydraulic switching converter. Journal of Dynamic Systems, Measurement, and Control, 138(9):091010, 2016.
[44] Rudolf Scheidl, Bernd Winkler, Helmut Kogler, Peter Ladner, Rainer Haas, and Evgeny Lukachev. Digital fluid technologies for the steel industry. BHM Berg-und Hüttenmännische Monatshefte, 161(11):504–509, 2016.
[45] Christoph Gradl and Rudolf Scheidl. Performance of an energy efficient low power stepper converter. Energies, 10(4):445, 2017.
[46] Evgeny Lukachev and Rudolf Scheidl. Hydraulic switching type position control of a large cylinder drive. In 2018 Global Fluid Power Society PhD Symposium (GFPS), pages 1–6. IEEE, 2018.
[47] Helmut Kogler, Markus Schöberl, and Rudolf Scheidl. Passivity-based control of a pulse-width mode operated digital hydraulic drive. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 233(6):656–665, 2019.
[48] Helmut Kogler, Rudolf Scheidl, and Michael Ehrentraut. A simulation model of a hydraulic buck converter based on a mixed time frequency domain iteration. In ASME/BATH 2013 Symposium on Fluid Power and Motion Control, pages V001T01A006–V001T01A006. American Society of Mechanical Engineers, 2013.
[49] Victor J De Negri, Pengfei Wang, Andrew Plummer, and D Nigel Johnston. Behavioural prediction of hydraulic step-up switching converters. International journal of fluid power, 15(1):1–9, 2014.
[50] Marcos P Nostrani, Alessio Galloni, Henrique Raduenz, and Victor J De Negri. Design and optimization of a fast switching hydraulic step-down converter for position and speed control. In Proceedings of 15: th Scandinavian International Conference on Fluid Power, June 7-9, 2017, Linköping, Sweden, number 144, pages 361–369. Linköping University Electronic Press, 2017.
[51] Victor J De Negri, Marcos P Nostrani, Pengfei Wang, D Nigel Johnston, and Andrew Plummer. Modelling and analysis of hydraulic step-down switching converters. International Journal of Fluid Power, 16(2):111–121, 2015.
[52] Marcos Nostrani, Alessio Galloni, Henrique Raduenz, and Victor De Negri. Theoretical and experimental analysis of a hydraulic step-down switching converter for position and speed control. In The Eight Workshop on Digital Fluid Power, Tampere, Finland, May, pages 157–175, 2016.
[53] Rudolf Scheidl, Bernd Winkler, and Andreas Plöckinger. Digital fluid power in the 7th year of dfp workshops. In The Seventh Workshop on Digital Fluid Power, pages 4–8. The Digital Fluid Power Workshop series, 2015.
[54] Min Pan, D Nigel Johnston, Andrew Plummer, Sylwester Kudzma, and Andrew Hillis. Active control of pressure pulsation in a piping system using measured dynamic flow rate. In ASME/BATH 2013 Symposium on Fluid Power and Motion Control, pages V001T01A013–V001T01A013. American Society of Mechanical Engineers, 2013.
[55] Min Pan, Nigel Johnston, and Andrew Hillis. Active control of pressure pulsation in a switched inertance hydraulic system. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 227(7):610–620, 2013.
[56] Helmut Kogler, Rudolf Scheidl, and Bernd Hans Schmidt. Analysis of wave propagation effects in transmission lines due to digital valve switching. In ASME/BATH 2015 Symposium on Fluid Power and Motion Control, pages V001T01A057–V001T01A057. American Society of Mechanical Engineers, 2015.
[57] Shuang Peng. The concept of a zero-flowrate-switching controller. In The Eight Workshop on Digital Fluid Power, Tampere, Finland, May, pages 187–199, 2016.
[58] Mikko Huova, Arttu Aalto, Matti Linjama, Kalevi Huhtala, Tapio Lantela, and Matti Pietola. Digital hydraulic multi-pressure actuator–the concept, simulation study and first experimental results. International Journal of Fluid Power, pages 1–12, 2017.
[59] Peter Dengler, Marcus Geimer, and René von Dombrowski. Deterministic control strategy for a hybrid hydraulic system with intermediate pressure line. In ASME/BATH 2012 Symposium on Fluid Power and Motion Control, pages 334–347. American Society of Mechanical Engineers, 2012.
[60] C Stauch, F Schulz, P Bruck, J Rudolph, and Gewerbepark Eschberger Weg. Energy recovery using a digital piston-type accumulator. In Proceedings of the Fifth Workshop on Digital Fluid Power. Tampere: Tampere University of Technology, pages 57–73, 2012.
[61] Niels Henrik Pedersen, Sören Christian Jensen, Rico Hjerm Hansen, Anders Hedegaard Hansen, and Torben Ole Andersen. Control of an energy efficient hydraulic cylinder drive with multiple pressure lines. 2018.
[62] Matti Linjama, Mikko Huova, Matti Pietola, Jyri Juhala, and Kalevi Huhtala. Hydraulic hybrid actuator: Theoretical aspects and solution alternatives. In Proceedings of the 14th Scandinavian International Conference on Fluid Power SICFP, volume 15, pages 20–22, 2015.
[63] H. Hänninen, J. Kajaste, and M. Pietola. Optimizing hydraulic energy recovery system of reach truck. In ASME/BATH 2012 Symposium on Fluid Power and Motion Control, pages 110–122. American Society of Mechanical Engineers, 2012.
[64] Mikko Huova, Arttu Aalto, Matti Linjama, and Kalevi Huhtala. Study of energy losses in digital hydraulic multi-pressure actuator. In Proceedings of 15th Scandinavian International Conference on Fluid Power, June 7-9, 2017, Linköping, Sweden, number 144, pages 214–223. Linköping University Electronic Press, 2017.
[65] Matti Linjama and Mikko Huova. Model-based force and position tracking control of a multi-pressure hydraulic cylinder. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 232(3):324–335, 2018.
[66] Adj Prof Matti Linjama, Tech Mikko Huova, M Sc Jyrki Tammisto, Tech Mikko Heikkilä, Seppo Tikkanen, Tech Jyrki Kajaste, Tech Miika Paloniitty, and Matti Pietola. Hydraulic hybrid working machines project–lessons learned.
[67] Matti Linjama, HP Vihtanen, Ari Sipola, and Matti Vilenius. Secondary controlled multichamber hydraulic cylinder. In The 11th Scandinavian International Conference on Fluid Power, SICFP, volume 9, pages 2–4, 2009.
[68] Mikko Huova, Arto Laamanen, and Matti Linjama. Energy efficiency of three-chamber cylinder with digital valve system. International Journal of Fluid Power, 11(3):15–22, 2010.
[69] Anders Hedegaard Hansen, Rico Hjerm Hansen, and Henrik C Pedersen. Optimisation of working areas in discrete hydraulic power take off-system for wave energy converters. In Proceedings of the 5th Workshop on Digital Fluid Power. Tampere University of Technology, 2012.
[70] Henri C Belan, Cristiano C Locateli, Birgitta Lantto, Petter Krus, and Viktor J De Negri. Digital secondary control architecture for aircraft application. In Proc. 7th Workshop on Digital Fluid Power, DFP15, Linz, Austria, pages 22–40, 2015.
[71] Karl Pettersson, Kim Heybroek, Per Mattsson, and Petter Krus. A novel hydromechanical hybrid motion system for construction machines. International Journal of Fluid Power, 18(1):17–28, 2017.
[72] Kim Heybroek, Erik Norlin, and A Sipola. Hydraulic multi-chamber cylinders in construction machinery. In Hydraulikdagarna, March 16-17, 2015, 2015.
[73] Kim Heybroek and Johan Sjöberg. Model predictive control of a hydraulic multichamber actuator: A feasibility study. IEEE/ASME Transactions on Mechatronics, 23(3):1393–1403, 2018.
[74] Rico H Hansen, Torben O Andersen, and Henrik C Perdersen. Analysis of discrete pressure level systems for wave energy converters. In Fluid Power and Mechatronics (FPM), 2011 International Conference on, pages 552–558. IEEE, 2011.
[75] Rico H Hansen, Anders Hansen, and Torben O Andersen. Influence and utilisation of pressure propagation in pipelines for secondary controlled discrete displacement cylinders. In Applied Mechanics and Materials, volume 233, pages 72–75. Trans Tech Publ, 2012.
[76] Rico Hjerm Hansen, Torben Ole Andersen, and Henrik C Pedersen. Determining required valve performance for discrete control of pto cylinders for wave energy. 2012.
[77] Rico H Hansen, Anders Hansen, and Torben O Andersen. Simulation of utilisation of pressure propagation for increased efficiency of secondary controlled discrete displacement cylinders. In Applied Mechanics and Materials, volume 233, pages 3–6. Trans Tech Publ, 2012.
[78] Rico H Hansen, Morten M Kramer, and Enrique Vidal. Discrete displacement hydraulic power take-off system for the wavestar wave energy converter. Energies, 6(8):4001–4044, 2013.
[79] Rico H Hansen, Torben O Andersen, Henrik C Pedersen, and Anders H Hansen. Control of a 420 kn discrete displacement cylinder drive for the wavestar wave energy converter. In ASME/BATH 2014 Symposium on Fluid Power and Motion Control, pages V001T01A021–V001T01A021. American Society of Mechanical Engineers, 2014.
[80] Anders Hedegaard Hansen and Henrik C Pedersen. Energy cost of avoiding pressure oscillations in a discrete fluid power force system. In ASME/BATH 2015 Symposium on Fluid Power and Motion Control, pages V001T01A044–V001T01A044. American Society of Mechanical Engineers, 2015.
[81] Anders Hansen and Henrik Pedersen. Reducing fatigue loading due to pressure shift in discrete fluid power force systems. In 9th FPNI Ph. D. Symposium on Fluid Power, pages V001T01A002–V001T01A002. American Society of Mechanical Engineers, 2016.
[82] Alessandro DellAmico, Marcus Carlsson, Erik Norlin, and Magnus Sethson. Investigation of a digital hydraulic actuation system on an excavator arm. In 13th Scandinavian International Conference on Fluid Power; June 3-5; 2013; Linköping; Sweden, number 092, pages 505–511. Linköping University Electronic Press, 2013.
[83] Olli Niemi-Pynttäri, Matti Linjama, Arto Laamanen, and Kalevi Huhtala. Parallel pump-controlled multi-chamber cylinder. In ASME/BATH 2014 Symposium on Fluid Power and Motion Control, pages V001T01A014–V001T01A014. American Society of Mechanical Engineers, 2014.
[84] Anders H Hansen, Magnus F Asmussen, and Michael M Bech. Energy optimal tracking control with discrete fluid power systems using model predictive control. In Proceedings of the Ninth Workshop on Digital Fluid Power, Aalborg, Denmark, pages 7–8, 2017.
[85] Viktor Donkov, Torben Ole Andersen, Morten Kjeld Ebbesen, and Henrik Clemmensen Pedersen. Applying digital hydraulic technology on a knuckle boom crane. In The Ninth Workshop on Digital Fluid Power, 2017.
[86] Anders Hedegaard Hansen, Magnus F Asmussen, and Michael M Bech. Model predictive control of a wave energy converter with discrete fluid power power take-off system. Energies, 11(3):635, 2018.
[87] Viktor Hristov Donkov, Torben Ole Andersen, Henrik Clemmensen Pedersen, and Morten Kjeld Ebbesen. Application of model predictive control in discrete displacement cylinders to drive a knuckle boom crane. In 2018 Global Fluid Power Society PhD Symposium (GFPS), pages 408–413. IEEE, 2018.
[88] Anders H Hansen, Magnus F Asmussen, and Torben O Andersen. Valve shifting time in a digital fluid power system-energy efficiency versus fatigue loading. In Proceedings of the 6th International Conference on Control, Mechatronics and Automation, pages 128–132. ACM, 2018.
[89] Anders H Hansen, Magnus F Asmussen, and Michael M Bech. Hardware-in-the-loop validation of model predictive control of a discrete fluid power power take-off system for wave energy converters. Energies, 12(19):3668, 2019.
[90] Viktor Donkov, Torben Andersen, Morten Kjeld Ebbesen, Matti Linjama, and Miika Paloniitty. Investigation of the fault tolerance of digital hydraulic cylinders. In the Sixteenth Scandinavian Conference on fluid power, Tampere, Finland, 2019
[91] Eva Holl, Rudolf Scheidl, and Sulaymon Eshkabilov. Simulation study of a digital hydraulic drive for a knee joint exoskeleton. In ASME/BATH 2017 Symposium on Fluid Power and Motion Control. American Society of Mechanical Engineers Digital Collection, 2017.
[92] Rudolf Scheidl and Simon Mittlböck. A hydraulic piloting concept of a digital cylinder drive for exoskeletons. In BATH/ASME 2018 Symposium on Fluid Power and Motion Control. American Society of Mechanical Engineers Digital Collection, 2018.
[93] Hermann Mehling and Daniel Weiler. Digital hydraulics valve stage, October 13 2015. US Patent 9,157,461.
Biographies
Viktor Hristov Donkov received M.Sc. in Mechatronic Control Engineering (2017) from Aalborg University (AAU), Denmark. Currently he is working towards a doctoral degree at the Energy Department of AAU. His main research interests are multi-chamber cylinders and model predictive control.
Torben Ole Andersen has been a Professor in the Department of Energy Technology, Aalborg University, since 2005, being the head of the section: Fluid Power and Mechatronic Systems. He has a Ph.D. in Control Engineering (1996), and a M.Sc. in Mechanical Engineering (1992), both from the Technical University of Denmark, DTU and a B.Sc. in Mechanical Engineering (1989) from the University of Southern Denmark, SDU. His research interests include control theory, energy usage and optimization of fluid power components and systems and mechatronic systems in general.
Matti Linjama obtained a D Tech degree at Tampere University of Technology, Finland in 1998. Currently, he is an adjunct professor at the Automation Technology and Mechanical Engineering Unit, Tampere University. He started the study of digital hydraulics in 2000 and has focused on the topic since then. Currently, he is leader of the digital hydraulics research group and his professional interests include the study of hydraulic systems with high performance and energy efficiency.
Morten Kjeld Ebbesen is affiliated with the Department of Engineering Sciences, University of Agder, Norway, as an associate professor in the Mechatronics group. He received his MSc (2003) and Ph.D. (2008) in mechanical engineering from the University of Aalborg, Denmark. His interests are dynamics, flexible multi-body systems, time-domain simulation, fluid power, and optimization.
International Journal of Fluid Power, Vol. 21_2, 263–304.
doi: 10.13052/ijfp1439-9776.2125
© 2020 River Publishers