A Health Aware Control Design for Extending the Remaining Useful Life of an Electro-Hydrostatic Actuator
Simo Käki*, Vinay Partap Singh, Mikko Huova and Tatiana Minav
Innovative Hydraulics and Automation, Tampere University, Tampere, Finland
E-mail: simo.kaki@tuni.fi; vinaypartapsingh@tuni.fi; mikko.huova@tuni.fi; tatiana.minav@tuni.fi
*Corresponding Author
Received 24 September 2025; Accepted 06 January 2026
Abstract
Electro-hydrostatic actuators are widely used in aerospace, industrial, and off-road machinery due to their efficiency and self-contained design. However, gear-pump degradation increases internal leakage, reducing performance and elevating failure risk.
This paper proposes a health-aware control framework that accounts for pump degradation in closed-loop control. Internal leakage progression is modeled with a nonlinear Wiener process and the degradation state is estimated online with an extended Kalman filter. The degradation state is used within a nonlinear model predictive controller to adjust control actions using predicted remaining useful life.
The approach is evaluated in nonlinear simulations and compared with a proportional–integral–derivative controller. Results indicate that the proposed controller mitigates leakage-induced performance loss and increases predicted pump remaining useful life by 2.75% while maintaining acceptable position tracking accuracy. Although the improvement is modest under accelerated degradation, the framework is suited to slowly evolving degradation and supports predictive maintenance of safety-critical actuation systems.
Keywords: Electro-hydrostatic actuator, health aware control, hydraulic pump, model predictive control, remaining useful life.
1 Introduction
Safety-critical systems in off-road mobile machinery, such as steering mechanisms, braking systems, and actuators, play a critical role in ensuring both operator and machine safety during operations in challenging environments. These systems are subjected to harsh operating conditions that increase the likelihood of functional degradation and unexpected failures. Failures can have severe consequences, making reliability and timely maintenance essential, particularly in mission-critical applications such as autonomous or remote-operated machines.
In recent years, the focus on sustainability and reliability in engineering has underscored the importance of extending the operational lifespan of key components. This is particularly relevant for off-road machinery, where downtime and maintenance costs have significant economic and environmental implications. A core concern is the accurate assessment and management of Remaining Useful Life (RUL), which quantifies how long a component can operate before performance drops below acceptable thresholds. Degradation is often influenced by how the system is operated, and certain operating points may accelerate wear. Consequently, manipulating operating points to manage degradation and reduce the risk of unplanned stoppages is desirable.
The health-aware control (HAC) paradigm was introduced by Escobet et al. [1, 2] as an approach that integrates health monitoring, control, and prognosis to enhance system reliability. In HAC, a prognosis module continuously estimates health status and aging of critical components, allowing the controller to modify its objectives accordingly. Unlike fault-tolerant control, which primarily aims to preserve operability after faults occur, HAC proactively adjusts control actions before failure conditions are reached. This distinction is important because maintaining performance under poor health conditions may inadvertently accelerate degradation, motivating integrated health-aware strategies.
Model predictive control (MPC) has emerged as an effective framework for integrating prognosis and control to manage actuator degradation. In electro-hydraulic systems, MPC can outperform traditional methods in robustness and performance [3]. Unlike PID controllers, MPC can explicitly handle nonlinearities and constraints. For instance, Pereira et al. [4] developed an MPC framework that uses prognostic information to distribute control effort among redundant actuators to avoid breakdowns due to degradation. Similarly, Dadash and Björsell [5] proposed an MPC-based approach to compute state-action costs without relying on predefined degradation models. Zhang et al. [6] addressed the trade-off between reliability and performance in systems with degrading actuators and demonstrated improved functionality over extended operating periods.
Accurate degradation modeling is a key enabler for HAC. Letot and Dehombreux [7] demonstrated how degradation models support reliability estimation and residual lifetime prediction for maintenance planning. Recent work by Ma et al. [8] highlights the potential of physics-informed machine learning to capture complex degradation phenomena in electro-hydrostatic actuators. Zagorowska et al. [9] surveyed degradation models relevant to control design and emphasized the influence of operating conditions on degradation.
Electro-hydrostatic actuators (EHAs) are used in modern hydraulic systems due to their efficiency, high power density, and ability to operate without centralized hydraulic circuits [10, 11]. EHAs integrate electrical, mechanical, and hydraulic components, typically consisting of an electric motor, a hydraulic pump, and a hydraulic actuator. Unlike conventional hydraulic systems relying on centralized pumps and fluid distribution networks, EHAs function as self-contained units that directly convert electrical energy into hydraulic power. This architecture can enhance reliability, reduce maintenance needs, and eliminate hydraulic piping, making EHAs attractive in aerospace, off-road machinery, and industrial automation [8, 11].
However, EHAs are subject to degradation and faults, particularly due to internal leakage and wear in the hydraulic pump [12]. Previous research has explored real-time health monitoring [13, 14] and fault-tolerant control methods [15] to sustain functionality under failure conditions. These strategies do not actively mitigate degradation; instead, they focus on maintaining operability, sometimes at the cost of accelerated wear. This motivates HAC strategies that integrate degradation estimation and predictive control to extend RUL while maintaining system performance.
While HAC has been explored in various actuator systems, its application to EHAs remains limited. As a result, EHA control designs often do not explicitly account for component degradation when optimizing performance. In particular, there is a lack of integrated EHA frameworks that combine a physics-motivated degradation model for pump internal leakage, online degradation-state estimation, and predictive control actions that explicitly incorporate RUL information. To address this gap, this paper makes the following contributions:
• A health-aware control architecture for an EHA that couples gear pump degradation, online prognostics, and closed-loop control.
• An online degradation-state estimation approach based on an extended Kalman filter to estimate the leakage-related degradation state during operation.
• A degradation-aware control formulation using MPC that adapts control actions based on predicted RUL to balance tracking performance and component preservation.
• A nonlinear simulation-based evaluation against a baseline PID controller, demonstrating RUL extension while maintaining acceptable tracking accuracy.
The primary aim of this research is to develop a health-aware control system for a previously proposed EHA-based steering mechanism [16], with a focus on extending the RUL of the gear pump. The proposed framework is visualized in Figure 1.
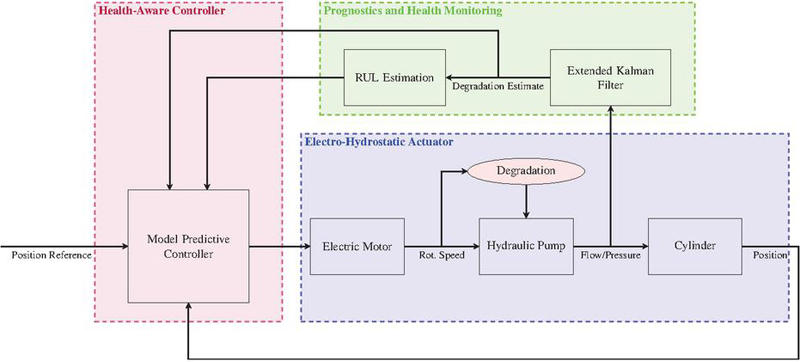
Figure 1 An HAC framework for an EHA.
This journal manuscript extends our previous conference proceeding [17] in several key respects.
First, the health-aware control formulation is refined. In the journal version, the penalty on the manipulated variable is adapted as a function of the estimated RUL. This replaces the earlier approach that directly weighted a degradation tracking objective. The revision provides a more explicit and practically tunable trade-off between tracking performance and pump preservation.
Second, the online degradation estimation is augmented. The extended Kalman filter is extended to estimate not only the degradation state but also its drift rate. This improves robustness in long-duration simulations and under uncertainty in degradation dynamics.
Third, the evaluation is expanded beyond long-term mission simulations. The journal manuscript adds step-response simulations that compare the PID baseline and model predictive control under multiple manipulated-variable weight settings. This clarifies tuning trade-offs between responsiveness and wear mitigation.
Fourth, a sensitivity analysis is added. It quantifies how parametric uncertainty affects tracking error and degradation progression. This strengthens the robustness assessment of the proposed approach.
Finally, the PID benchmark is described in greater detail, including implementation choices supporting stability margins. The long-term simulation results are updated accordingly. As a result, the quantitative RUL extension values reported in this manuscript differ from those in the conference proceeding.
The remainder of this paper is organized as follows. Section 2 presents the EHA system description and the pump degradation modeling. Section 3 presents the degradation estimation and the proposed health-aware control framework, including its implementation using model predictive control. Section 4 presents the simulation results and performance analysis. Section 5 presents further analysis of the results and their implications. Finally, Section 6 concludes the paper and discusses future directions. A list of the abbreviations used in this paper is provided at the end of the article.
2 System Description and Modeling
EHAs offer efficiency and reliability but are susceptible to degradation, particularly in the gear pump, which is the primary focus of this study. Increased internal leakage due to wear reduces performance and safety. First this section presents the EHA system model, capturing its electrical, mechanical, and hydraulic interactions. Then a degradation model for the pump is presented to support health-aware control strategies.
2.1 Electro-Hydrostatic Actuator System Model
The EHA system comprises an electric motor, a fixed displacement hydraulic pump, and a double-acting hydraulic cylinder. A hydraulic diagram of EHA is depicted in Figure 2. The system’s dynamics are modeled to capture the interaction between electrical, mechanical, and hydraulic domains. The following EHA model is adapted from literature [8, 11, 15].
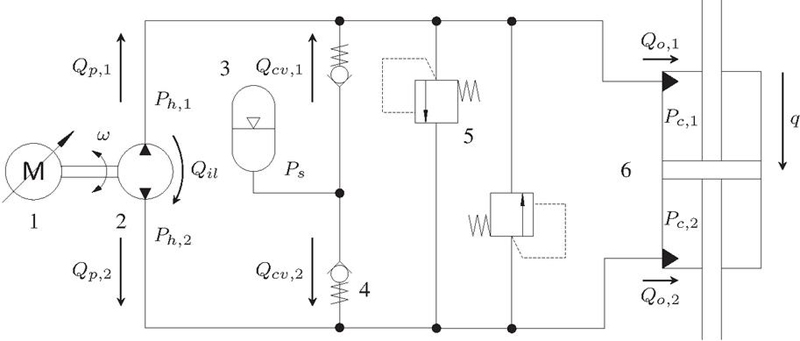
Figure 2 EHA hydraulic diagram. 1. Electric motor, 2. Pump, 3. Accumulator, 4. Check valve, 5. Pressure relief valves, 6. Double-acting cylinder.
Given that the primary focus of this study is the hydraulic pump, the electric motor is approximated as a first-order system
| (1) |
where is the rotational speed of the motor, is the reference rotational speed, and is the time constant. This simplification is justified by the high bandwidth of the torque control loop, which makes the transient dynamics of the motor negligible compared to the slower rotational speed and hydraulic system dynamics in the studied application and load cycle.
The main subject for investigation is the hydraulic pump. The inlet and outlet flows of the gear pump can be expressed as [8]
| (2) | ||
| (3) |
where is the pump displacement, and are the hose pressures, is the internal leakage coefficient, and is the external leakage coefficient. All internal leakage paths are lumped into single laminar leakage term to minimize the number of parameters that need to be estimated. The external leakage coefficient is assumed to be known.
The hoses connecting the pump to the cylinder chambers are modeled using flow continuity equations
| (4) | ||
| (5) |
where and are the hose volumes, is the bulk modulus, and and are the flows through the check valves.
To prevent cavitation, check valves have been integrated to the model with accumulator as a common pressure source . It also serves as a source of oil for the system, replacing possible oil losses of the system. The accumulator dynamics are assumed insignificant and thus neglected from the mathematical model of the EHA [18]. The flow through the check valves can be expressed as modified orifice equations [19]
| (6) |
where , is the flow coefficient, is the discharge coefficient, is the check valve area, is the oil density, and is the transition pressure.
The hoses are connected to the cylinder chambers via orifices. The orifice equations can be expressed as [19]
| (7) |
where , is the flow coefficient, is the orifice area and is the corresponding chamber pressure. The chamber volumes are
| (8) | ||
| (9) |
where and are the effective areas of the piston, and are the dead volumes of the chambers, and the displacement of the piston.
The flow continuity equations for the cylinder chambers are
| (10) | ||
| (11) |
where is the bulk modulus. The force created by the actuator is
| (12) |
where is the viscous friction coefficient. Other friction forces are assumed small and thus neglected.
Finally, the force balance equation
| (13) |
where is the load force and is the equivalent load mass. The numerical values of the EHA model are presented in Table 1.
Table 1 EHA model parameter values
| Parameter | Symbol | Value |
| Motor time constant | 0.1s | |
| Pump displacement | 2.5465.10-6m3/rad | |
| External leakage coefficient | 1.10-13(m3/s)/Pa | |
| Hose volume | 5.0671.10-5m3 | |
| Accumulator pressure | 20.105Pa | |
| Transition pressure | 0.5105Pa | |
| Check valve area | 1.9635.10-7/m3 | |
| Orifice area | 2.9225.10-5/m3 | |
| Discharge coefficient | 0.7 | |
| Piston area | , | 0.0021 m3 |
| Maximum stroke | 0.5m3 | |
| Chamber dead volume | 21.206.10-6m3 | |
| Viscous friction coefficient | 1500N/(m3/s) | |
| Bulk modulus | 900.106Pa | |
| Oil density | 850kg/m3 | |
| Effective inertial load | 650kg |
The derived model is nonlinear and too complex to be used to design a controller and is thus used as the simulation model of the EHA. A linear model derived in [18, 20] gives a good approximation of the piston head dynamics from the rotational speed of the pump. The transfer function relating the pump angular velocity to the linear displacement of the load is given by
| (14) |
where the total leakage coefficient of the system, consisting of pump internal leakage, pump external leakage, and actuator leakage, is given by . The parameter is the mean oil volume in the system.
2.2 Degradation Modeling for Gear Pumps
Gear pumps are critical components in hydraulic systems, where degradation typically manifests as increased internal leakage due to wear and tear. Since precise details of the degradation process are often unavailable, heuristic degradation models can be constructed to represent this behavior [9]. To effectively manage degradation, these models must account for the applied control effort and other influencing factors [21, 22]. For pumps, cumulative degradation models have been commonly used [4, 22, 23], demonstrating that high flow rates accelerate wear and degradation.
In this paper, the degradation of the pump is assumed to depend on rotational speed, with internal leakage increasing as the primary manifestation. This degradation is captured by an increase in the internal leakage coefficient, , which serves as a key indicator of the pump’s health.
Wiener-process-based models have been widely adopted in control applications due to their ability to handle stochastic variations [24, 25]. A nonlinear Wiener-process model, representing the progression of degradation, is formulated as follows:
| (15) |
where is the initial degradation measure, is the diffusion coefficient, is the standard Brownian motion, and is the parameter vector. The nonlinear part describes the deterministic degradation path of the actuator coupled with the control action . The form of is strongly context-dependent and should be carefully determined. This could be done using data recorded from the whole lifetime of a component or utilizing an accelerated life test rig to identify the degradation path of the component.
This formulation can also be expressed as an ordinary differential equation (ODE)
| (16) |
where is white noise. It is also noted that the degradation speed can also depend on the current degradation or degradation at time . Thus (16) is augmented and presented as
| (17) |
To identify the degradation model for gear pumps, data from an accelerated life test rig was utilized [26]. By contaminating the hydraulic oil with particles, controlled wear was induced on a 16cc /rev gear pump. The particle count measured in the test was 23/22/19 in ISO4406:2021 standard [27]. The pump was driven with rotational speed of 1000rpm for the whole duration of the test. The measured internal leakage data is shown in Figure 4, and the fitted deterministic degradation model is expressed as
| (18) |
where is the fitted parameter. The inclusion of degradation in equation (18) is motivated by higher internal leakage flow wearing the pump down even further.
The stochastic component of (15) is also considered by looking at the residuals of the fitted model in Figure 4. The residuals are shown in Figure 3. The effect of sensor noise to the residuals is assumed to be insignificant. The Wiener process satisfies
| (19) |
from which the diffusion coefficient can be estimated with
| (20) |
From the residuals the diffusion coefficient is estimated to be approximately 0[round-mode=places,round-precision=3]2.81877603540169e-15.
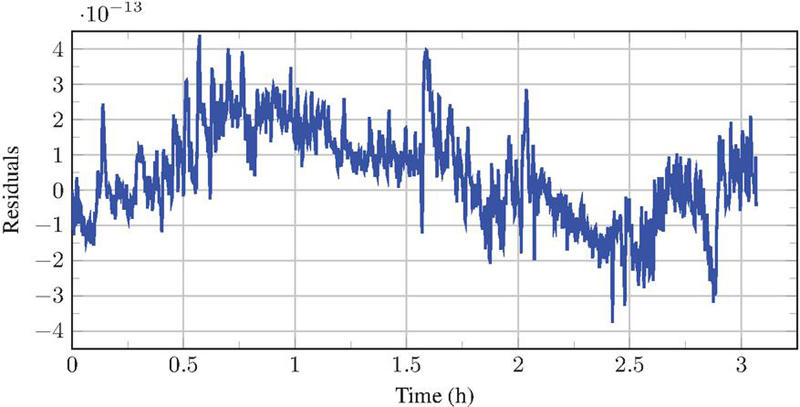
Figure 3 Residuals of degradation model fit.
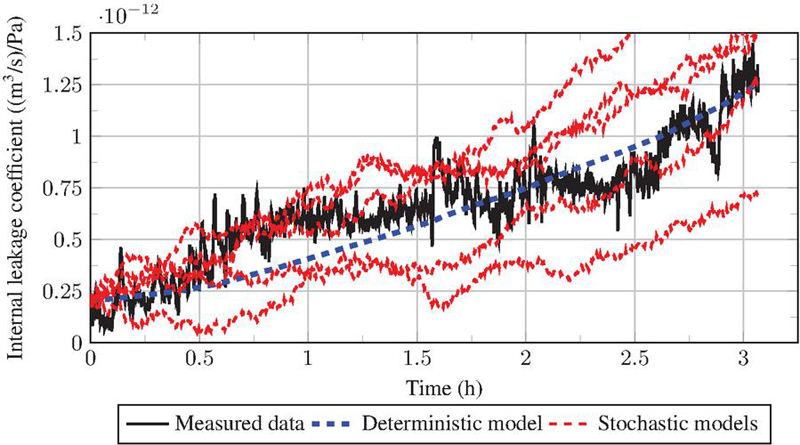
Figure 4 Measured internal leakage coefficient and fitted degradation models in accelerated test conditions.
Finally, the degradation model for the gear pump can be expressed as
| (21) |
Five of these models are also displayed in Figure 4 as stochastic models. It is evident that the deterministic model captures the overall upward trend in degradation, whereas the stochastic component accounts for the observed variability around this trend. As the accuracy of the deterministic model improves, the estimated diffusion coefficient decreases, resulting in reduced deviations of the stochastic model from the deterministic baseline.
The internal leakage coefficient can be estimated using an extended Kalman filter online. To estimate the RUL of the actuator, the future degradation trajectory is derived by solving equation (18) through separation of variables and integration. In this analysis, it is assumed that the rotational speed remains constant and that the influence of noise is negligible. Under these assumptions, the degradation trajectory is given by
| (22) |
where is the current degradation. By setting this equal to a failure threshold and solving for time, the RUL is
| (23) |
From (23) it is evident that the RUL will tend to infinity when pumps rotation speed approaches zero. This effect can be mitigated by adding a small constant to the denominator of (23). Since is assumed constant in the derivation, the RUL estimate must be updated whenever changes. Alternatively, an average value of based on historical usage can be employed. This average can be computed using techniques such as a windowed moving average.
3 Health-aware Control and Degradation Estimation
This section presents the proposed health-aware control implementation and motivates the selected methods. Compared with PID control, model predictive control (MPC) provides prediction and explicit constraint handling, which are essential for an EHA operating under varying conditions and nonlinear dynamics. MPC also enables a systematic trade-off between tracking performance and component preservation, supporting remaining useful life (RUL) extension.
In addition, this section introduces an extended Kalman filter (EKF) to estimate the unmeasurable pump degradation state under nonlinear dynamics and measurement noise. The EKF provides real-time health information that is integrated with MPC to adapt control actions as degradation evolves, mitigating wear while maintaining adequate actuator response.
3.1 Extended Kalman Filter for Degradation Estimation
This subsection presents the implementation of an EKF to estimate the internal leakage coefficient of a gear pump. The degradation is not directly measurable, requiring an estimation approach based on the available system measurements. The EKF is chosen for its ability to provide accurate state estimates in the presence of noise and uncertainties [28], which is crucial for adaptive control. The EKF algorithm is derived for a gear pump, with the assumption that the rotation speed , pressures and , and the flow are measured or known.
The degradation model is formulated as a nonlinear state-space system with two states:
| (24) | ||
| (25) |
where is the internal leakage coefficient, is the drift rate, is the measurable output, is the state vector, is the input vector, and is the measured output. The process noise and measurement noise are assumed to follow zero-mean Gaussian distributions. Thus, the estimation process relies on the measurements of , , , and .
The EKF algorithm consists of a prediction step and an update step. In the prediction step, the state and covariance are propagated forward in time using the system model. This a priori information is denoted by superscript minus (-). In the update step a posteriori information is denoted by superscript plus (+).
Since the system (24) is nonlinear, the model is linearized at each step using a first-order Taylor series expansion. The discrete time jacobians of the system dynamics and measurement function are
| (26) | ||
| (27) |
where is the sampling time of the filter.
The prediction step updates the state estimate and covariance as:
| (28) | ||
| (29) |
In the update step, the measurement residual and Kalman gain are computed as:
| (30) | ||
| (31) |
The estimated degradation state is then updated using:
| (32) |
The covariance matrix update follows the Joseph form, which ensures numerical stability and preserves symmetry:
| (33) |
The use of the Joseph form prevents loss of positive definiteness in the covariance matrix due to numerical errors. This formulation is crucial when dealing with small numerical updates in long-term estimation tasks.
By applying the EKF, the degradation state and its drift rate are continuously estimated based on the available system measurements. This enables real-time tracking of the pump’s internal condition. The proposed estimation method ensures robustness against measurement noise and modeling uncertainties, improving the reliability of the health-aware control system.
3.2 Model Predictive Control for EHA Piston Head Position and Degradation Control
Model Predictive Control (MPC) is employed to achieve two primary objectives: regulating the piston head position and managing the degradation of the gear pump. The MPC framework optimizes the control inputs while considering constraints and performance criteria [4, 6].
The prediction model is
| (34) | ||
| (35) |
where , , and . The controlled value is the postion of the piston. It is to be noted that the first input of the model is the manipulated variable, and the second input is considered measured disturbance.
The MPC tries to find the optimal control sequence by minimizing the cost function
| (36) |
Here the first component referes to output reference tracking and can be formulated as
| (37) |
where is the current control interval, is the prediction horizon, is the predicted value of the controlled variable at the th prediction horizon step, is the reference trajectory, is the scale factor, and is the tuning weight. The reference trajectory may be defined as a constant value or extrapolated from past reference data. The second and third component of the cost function limit the usage of manipulated variable. They can be formulated as
| (38) | ||
| (39) |
where is the value of manipulated variable at the th prediction horizon step, is the reference trajectory, is the scale factor, and and are the tuning weights. The last component of the cost function is
| (40) |
where is the constraint violation penalty weight and is the slack variable at the control interval .
The weights in the above cost function are usually treated as tuning parameters and chosen by hand. But for controlling the degradation, a more sophisticated approach must be used. It was assumed that the amplitude of the rotation speed dictates the speed of the degradation. Based on this assumption it is reasonable to assume that increasing the weight of the manipulated variable increases the RUL. Increasing the weight for manipulated variable will reduce the reference following performance of piston head position. Thus the weight for manipulated variables is chosen with
| (41) |
where
| (42) |
The scaling parameter needs to be ensured to stay between zero and one. This approach increases the weight if the RUL of the pump is insufficient to complete the required mission.
4 Results
The proposed HAC system was evaluated by employing a nonlinear simulation model of the EHA, in which degradation was introduced as an increasing internal leakage coefficient in the gear pump. The system was tested under varying operating conditions to analyze its tracking performance, degradation progression, and RUL extension. The HAC system was compared against a baseline PID controller. This comparison highlights the advantages of MPC and EKF in handling nonlinearities, providing predictive control, and offering robust state estimation, which contribute to the observed improvements in RUL.
The PID controller was tuned utilizing the pole placement method and finetuned by hand. The control signal was calculated using the 2DOF-PID controller equation [29, 30]
| (43) |
in which the filtered derivative satisfies
| (44) |
where is the proportional setpoint weight, is the proportional gain, is the integral gain, is the derivative gain, is the filter time constant, and is the control error. Here, it is worth noting that the derivative term is computed using only the controlled variable . The PID controller parameters are presented in Table 2.
The stability margins of the PID controller are increased by utilizing a notch filter at its output with a transfer function
| (45) |
where is the central rejected frequency, is the damping ratio, and is the gain at . The filter is tuned to suppress the resonant peak around 130rad/s. This sets the gain margin to 3.57 and the phase margin to 46.1°.
Table 2 PID-controller parameters
| Parameter | Symbol | Value |
| P-gain | [round-mode=figures,round-precision=4]6000 | |
| I-gain | [round-mode=figures,round-precision=4]5000 | |
| I-time | [round-mode=figures,round-precision=3]1.2s | |
| D-gain | [round-mode=figures,round-precision=4]2000 | |
| D-time | [round-mode=figures,round-precision=2].3333s | |
| Setpoint weight | [round-mode=figures,round-precision=2].5 | |
| Central rejected frequency | [round-mode=figures,round-precision=2]130rad/s | |
| damping ratio | [round-mode=figures,round-precision=2]1.0 | |
| Gain | [round-mode=figures,round-precision=2]0.1 |
The HAC system was constructed according to section 3.2. The weight for the position error in (36) was set to five. For the control signal, the weight was determined according to equations (41) and (42), with a maximum value of five. Static MPC parameters are listed in Table 3. Step responses for the PID and MPC controllers, with different weight settings, are shown in Figure 5.
Table 3 HAC parameters
| Parameter | Symbol | Value |
| Prediction horizon | 040 | |
| Control horizon | 020 | |
| Position error weight | 05 | |
| Manipulated variable rate weight | 01 | |
| Manipulated variable weight min | 02 | |
| Manipulated variable weight max | 05 | |
| Sampling time | 0.05s |
Figure 5a illustrates the position tracking performance of the controllers over a 30-second interval. At mark, a position reference step is applied, and at 20s mark, a load force step is applied. Both the PID controller and the MPC show sufficient performance. Specifically, an MPC with closely follows the reference trajectory, while higher weight values show progressively smoother but slightly delayed responses. This suggests a trade-off between control aggressiveness and tracking precision as increases.
Figure 5b presents the relative degradation levels of the controllers over the same time horizon. The PID controller shows a consistent increase in degradation, reaching the relative maximum at the end. MPC controller, on the other hand, maintains lower degradation profiles. Notably, MPC with exhibits the lowest degradation, while values between and result in similar degradation levels. However, provides a clearly faster response time. These results indicate that MPC not only enhances tracking performance but also contributes to reduced system wear over time.
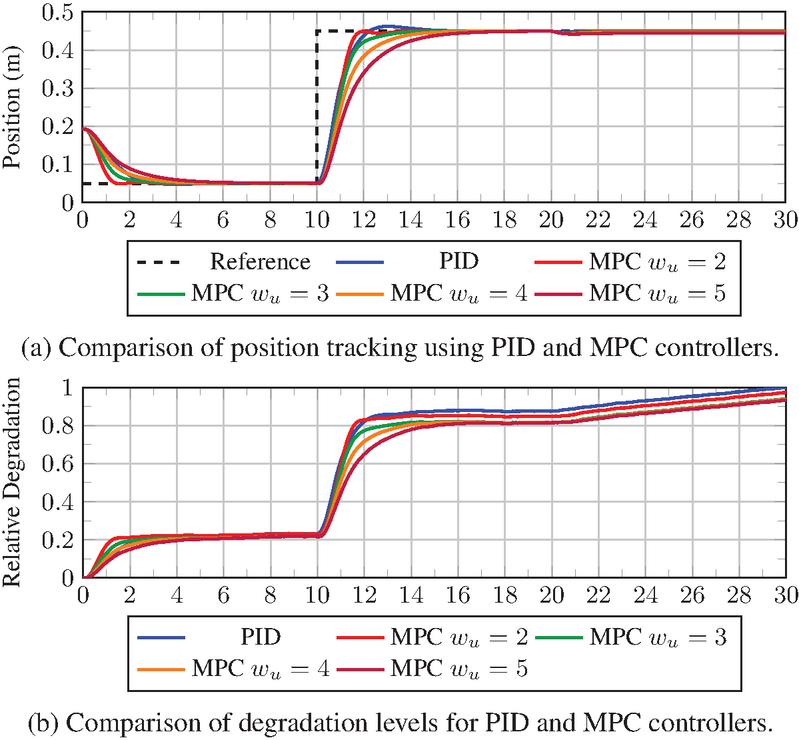
Figure 5 PID and MPC step response comparison.
4.1 Long-Term Simulations
The reference position and load force for the EHA were obtained from Mevea virtual environment simulations [16] and are shown in Figure 6. The reference trajectories were repeated until the degradation reached the specified failure threshold, corresponding to approximately ten cycles under accelerated wear conditions.
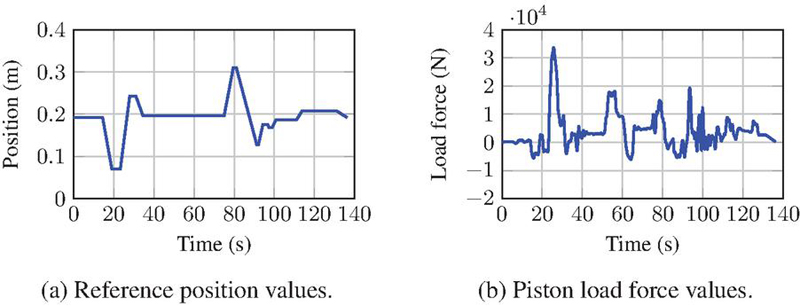
Figure 6 Position and load reference trajectories for simulation.
Figure 7a presents the cylinder position over the long-term simulation. Initially, both the MPC and PID controller exhibit comparable tracking performance. As the pump degrades, the MPC reduces control accuracy to mitigate stress on the actuator, thereby extending pump life. In contrast, the PID controller maintains tighter tracking, which accelerates pump degradation.
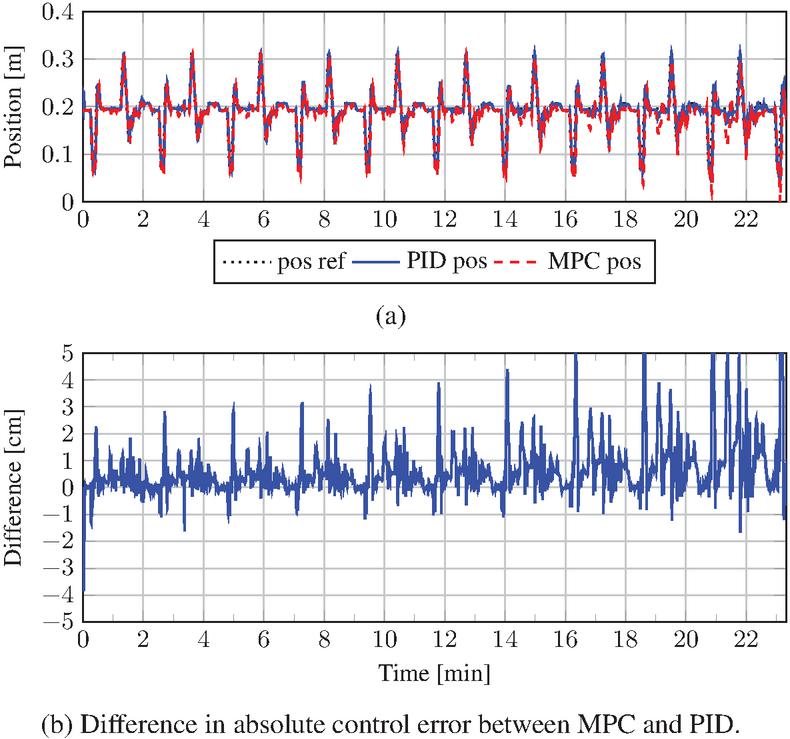
Figure 7 Cylinder position during the long-term simulation.
The position tracking performance of the PID and HAC controllers was compared by computing
| (46) |
Figure 7b shows that the difference in tracking errors was generally below 5cm3. The error difference was smallest when the manipulated variable weight (Figure 9) was close to zero. As degradation increased, HAC reduced pump usage to slow wear progression, resulting in a slightly higher control error. This trend is particularly visible during the final 5min of the simulation, where HAC extended the RUL at the cost of a modest increase in the tracking error.
Figure 8 illustrates the progression of degradation under the PID controller and the proposed HAC system. The pump degradation was accelerated in the simulation to reach failure within a practical time horizon. Under PID control, the EHA reached the failure threshold after 1291.67s. With HAC, the EHA lasted 1327.22s, corresponding to a RUL extension of 2.75%.
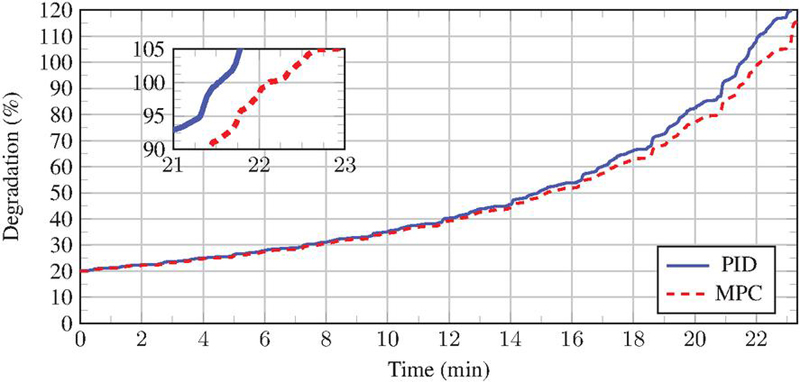
Figure 8 Simulated degradation trajectories of PID control and MPC in accelerated degradation conditions.
The HAC strategy achieved this improvement by dynamically adjusting the degradation weight based on the estimated RUL. The RUL estimate was smoothed utilizing a moving average filter applied to the pump rotational speed, with a window length of 20s. The resulting degradation weight is shown in Figure 9. At the start of the simulation, with minimal degradation present, the HAC system prioritized position tracking exclusively. As degradation progressed, the HAC system reduced pump utilization to extend the RUL. When the load decreased and the RUL estimate exceeded the required mission length of ten cycles, the degradation weight returned to zero.
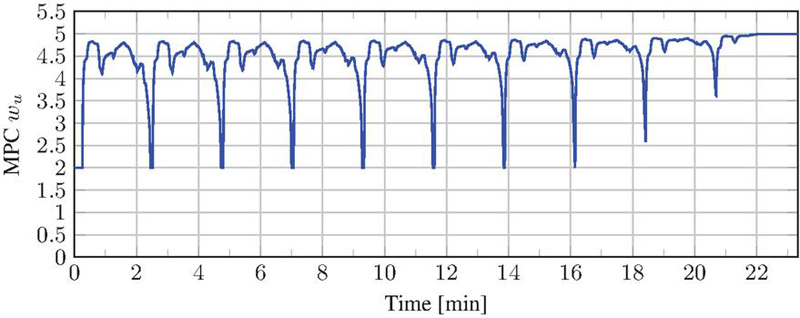
Figure 9 Evolution of the MPC control effort weight over simulation time.
This adaptive weighting illustrates the trade-off between control accuracy and pump preservation. For systems where small deviations in actuator position are acceptable as it postpones wear. However, in applications requiring high precision, further controller tuning may be necessary to balance accuracy and component lifespan.
4.2 Sensitivity Analysis of HAC
To assess the robustness of the proposed HAC system, a sensitivity analysis was performed by varying selected parameters of the nonlinear simulation model while keeping the MPC internal model fixed. The varied parameters were cylinder area, pump displacement, degradation acceleration factor, cylinder viscous friction coefficient, inertial mass, bulk modulus of the oil, and hose volume. Each parameter was modified by 20%, 10%, 10%, and 20% of its baseline value, and the resulting impact on control error and degradation was evaluated. The result of the sensitivity analysis for the most influential parameters are shown in Figure 10.
Parameters, such as the cylinder viscous friction coefficient, inertial mass, bulk modulus of the oil, and hose volume showed negligible influence on both control accuracy and degradation progression. This indicates that the HAC system maintains stable performance despite moderate uncertainties in these components.
In contrast, pump displacement emerged as the most critical parameter. A 10% change in displacement increased the control error by 22.9%, whereas a 10% increase reduced the error by 12%. Furthermore, decreasing displacement accelerated degradation and reduced RUL, whereas increasing displacement mitigated degradation and extended RUL.
Cylinder area also affected performance, albeit to a lesser extent. A reduction in area slightly increased control error and degradation, whereas an increase improved both metrics.
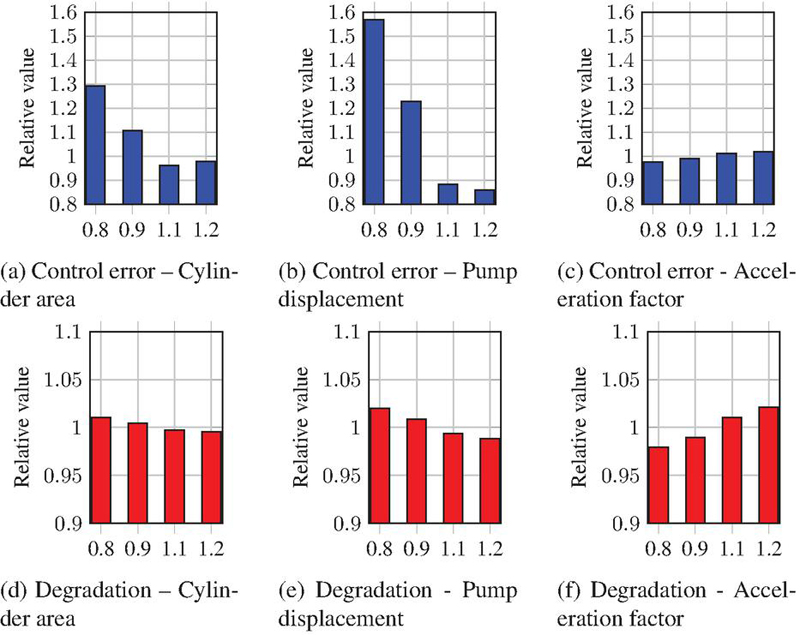
Figure 10 Sensitivity analysis of HAC system. First row: control error (blue). Second row: degradation (red). Columns: cylinder area, pump displacement, and acceleration factor.
Additionally, the sensitivity of the degradation dynamics was studied by scaling the effect of rotational speed on wear progression. Increasing the degradation acceleration factor resulted in a higher control error and faster degradation, whereas reducing the factor produced the opposite effect. This confirms that the HAC system adapts to changes in degradation severity, though it is naturally limited by the speed of the underlying wear process.
Overall, the sensitivity analysis demonstrates that, while most parameters have a minimal influence, pump displacement and degradation dynamics are dominant factors in determining both control performance and RUL extension.
5 Discussion
The results demonstrate that the proposed HAC system effectively mitigates degradation effects and extends the RUL of the gear pump. Under accelerated degradation conditions, the observed RUL extension was comparable to that reported by Zhang et al. [6], who achieved an 8.3s increase. However, while both studies indicate improvements in component lifespan, Zhang et al. focused on a different application area. In contrast, this study specifically addresses EHAs and the degradation of the gear pump, highlighting the relevance of HAC strategies in hydraulic actuation systems.
The degradation model employed in this study successfully captured the increasing trend of internal leakage, supporting its suitability for estimating wear progression in the gear pump. Nevertheless, the calibration data were limited in scope and did not encompass the full operational range of the pump. Additionally, the simulation relied on accelerated degradation conditions, which may not fully replicate the variability and usage patterns observed in real-world operations. These factors introduce uncertainty regarding the generalizability of the simulated results to practical scenarios. Furthermore, the use of a nonlinear Wiener process with static parameters assumes a fixed degradation rate throughout the simulation. In reality, wear progression is often dynamic and influenced by varying loads, temperatures, fluid properties, and operating conditions. As Wang et al. [25] emphasize, adaptive Wiener processes that update model parameters in real time can more accurately capture evolving failure modes. This is a potential direction for future improvements in predictive degradation modeling.
The long-term results show that HAC can extend RUL by reducing pump utilization at the cost of a modest increase in tracking error. In systems where a human operator closes an outer loop, the operator may compensate for reduced tracking fidelity by increasing the commanded input. This compensation can increase actuator demand and may reduce, or in the worst case eliminate, the RUL benefit that arises from lowering control effort. In operator-in-the-loop applications, the HAC strategy should therefore be coupled with explicit performance bounds (e.g., maximum allowable tracking error or rate limits) and, where possible, a operator model at the supervisory level. A practical implementation is a mode-based strategy where the controller prioritizes tracking during high-demand or safety-critical maneuvers and activates stronger health-preserving behavior during low-demand phases.
The degradation model parameters were identified using accelerated test data, which enables observable wear progression within a practical time horizon. Under normal operating conditions, degradation is slower and can exhibit different sensitivities to load, temperature, and fluid properties. The proposed framework remains applicable, but it requires model parameterization and validation under real-life operation conditions. In practice, this can be achieved by re-identifying the degradation model from fleet or test-rig data at nominal conditions, and by enabling online parameter adaptation to account for evolving operating regimes. Slower degradation also implies that the controller has more time to accumulate small reductions in wear, which may increase the achievable lifetime extension, although this should be confirmed experimentally.
The sensitivity analysis highlighted the importance of correct system parameterization. In particular, pump displacement was identified as the most influential factor, with a 10% difference causing a 22.9% increase in control error and accelerating degradation, while a 10% increase reduced error and mitigated wear. This finding underscores that design choices in pump sizing and parameter uncertainty directly affect both control performance and RUL extension. Although other parameters, such as cylinder area, also influenced performance, their impact was less pronounced compared to pump displacement.
Additionally, the sensitivity of the degradation dynamics was studied by scaling the effect of rotational speed on wear progression. Increasing the degradation acceleration factor resulted in a higher control error and faster degradation, whereas reducing the factor produced the opposite effect. This confirms that the HAC system adapts to changes in degradation severity. It also indicates that, when degradation is slower, both RUL and control error improve simultaneously. Therefore, larger lifetime improvements may be achievable under less aggressive degradation dynamics, provided that performance requirements allow corresponding reductions in pump utilization.
Although a 2.75% increase in RUL may seem modest, it has meaningful implications in practical applications. For instance, in off-road mobile machinery operating continuously for eight hours per day, this increase translates into several additional cycles before pump replacement is required. Delaying unscheduled maintenance can reduce costs, increase machine uptime, and improve the ability to schedule component replacements proactively. Even small gains in RUL can therefore contribute to system safety by reducing the likelihood of unexpected failures.
From a deployment perspective, the proposed approach introduces two additional elements beyond classical control, namely online degradation estimation and predictive control optimization. These additions are most justified in applications where constraints, varying operating conditions, and component preservation are explicit design objectives. In practice, the HAC mechanism can also be implemented as a supervisory layer that adjusts controller aggressiveness based on estimated health, while retaining a conventional baseline controller as a fallback for fault handling and safety-critical operation.
Overall, the results provide evidence that HAC can offer measurable benefits in managing actuator degradation. However, caution is warranted when extrapolating these findings to real-world applications, given the limitations of the degradation model and the use of accelerated wear conditions.
6 Conclusion
This paper presented a HAC approach for an EHA system, with the objective of extending the RUL of a gear pump while maintaining actuator performance. The proposed method integrates degradation modeling, online prognostics, and MPC to enable an explicit trade-off between tracking accuracy and component preservation under constraints.
Pump internal leakage progression was modeled using a nonlinear Wiener process. The degradation state was estimated online using an EKF, providing real-time health information for the controller. The estimated degradation and predicted RUL were incorporated into the control design through an adaptive health-aware mechanism, allowing the controller to adjust its behavior as the pump condition evolves. The overall framework was evaluated in nonlinear simulations and benchmarked against a baseline PID controller.
The results show that the HAC system can mitigate degradation effects and extend predicted pump RUL by 2.75% under accelerated wear conditions. The numerical improvement is modest in this accelerated scenario. However, the simulations demonstrate the intended mechanism, namely that reduced pump utilization can slow degradation while maintaining acceptable position tracking accuracy. The sensitivity analysis further indicated that achievable performance and lifetime benefits depend strongly on correct parameterization, particularly pump displacement, and on degradation severity.
The validity and generalizability of the results depend on the fidelity of the degradation model and simulation assumptions. Model parameters were identified from accelerated test data, and the current implementation assumes simplified operating conditions. Therefore, direct extrapolation to field operation should be made with caution. Future work should include experimental validation under normal operating conditions, extension toward adaptive degradation modeling to capture time-varying wear dynamics, and broader evaluation under realistic environmental and mission profiles. In addition, practical deployment aspects should be investigated, including real-time computational requirements and integration with existing control architectures. For operator-in-the-loop applications such as steer-by-wire, future studies should also consider driver compensation effects and supervisory strategies that maintain handling quality while preserving component health.
Overall, the proposed HAC framework provides a structured approach for incorporating health information into EHA control. With further development and experimental validation, it can support predictive maintenance strategies, improve reliability, and contribute to safer and more sustainable operation in off-road and industrial actuation systems.
Abbreviations
The following abbreviations are used in this manuscript:
| 2DOF-PID | Two-degree-of-freedom proportional–integral–derivative |
| EHA | Electro-hydrostatic actuator |
| EKF | Extended Kalman filter |
| HAC | Health-aware control or Health-aware controller |
| ISO | International Organization for Standardization |
| MPC | Model predictive control |
| ODE | Ordinary differential equation |
| PID | Proportional–integral–derivative |
| RUL | Remaining useful life |
Acknowledgment
We acknowledge the financial support of the Finnish Ministry of Education and Culture through the Intelligent Work Machines Doctoral Education Pilot Program (IWM VN/3137/2024-OKM-4).
References
[1] T. Escobet, V. Puig, and F. Nejjari. Health Aware Control and model-based Prognosis. In 2012 20th Mediterranean Conference on Control & Automation (MED), pages 691–696, 2012.
[2] T. Escobet, J. Quevedo, V. Puig, and F. Nejjari. Combining health monitoring and control. In Diagnostics and Prognostics of Engineering Systems: Methods and Techniques, pages 230–255. IGI Global Scientific Publishing, 2013.
[3] Thomas Sendelbach and Tobias Leutbecher. Model Predictive Control of Electro-Hydraulic Systems with Multiple Degrees of Freedom. In 14th International Fluid Power Conference, Dresden, Germany, 2024. River Publishers.
[4] Eduardo Bento Pereira, Roberto Kawakami Harrop Galvão, and Takashi Yoneyama. Model Predictive Control using Prognosis and Health Monitoring of actuators. In 2010 IEEE International Symposium on Industrial Electronics, pages 237–243, July 2010. ISSN: 2163-5145.
[5] Amirhossein Hosseinzadeh Dadash and Niclas Björsell. A framework for designing a degradation-aware controller based on empirical estimation of the state–action cost and model predictive control. Journal of Manufacturing Systems, 76:599–613, October 2024.
[6] Jianchun Zhang, Tianyu Liu, and Jianzhong Qiao. Solving a reliability-performance balancing problem for control systems with degrading actuators under model predictive control framework. Journal of the Franklin Institute, 359(9):4260–4287, June 2022.
[7] Christophe Letot and Pierre Dehombreux. Degradation models for reliability estimation and mean residual lifetime. VUB, Brussels, Belgium, May 2009.
[8] Zhonghai Ma, Haitao Liao, Jianhang Gao, Songlin Nie, and Yugang Geng. Physics-Informed Machine Learning for Degradation Modeling of an Electro-Hydrostatic Actuator System. Reliability Engineering & System Safety, 229:108898, January 2023.
[9] Marta Zagorowska, Ouyang Wu, James R. Ottewill, Marcus Reble, and Nina F. Thornhill. A survey of models of degradation for control applications. Annual Reviews in Control, 50:150–173, January 2020.
[10] Navatha Alle, Somashekhar S. Hiremath, Singaperumal Makaram, Karunanidhi Subramaniam, and Apratim Talukdar. Review on electro hydrostatic actuator for flight control. International Journal of Fluid Power, 17(2):125–145, May 2016.
[11] Min Gu, Shuai Wu, Chunfang Li, Zongxia Jiao, and Tao Yang. Multi-discipline simulation of electro-hydrostatic actuator with Modelica. In CSAA/IET International Conference on Aircraft Utility Systems (AUS 2018), pages 1499–1504, June 2018.
[12] Yannick Duensing, Amos Merkel, and Katharina Schmitz. Degradation Identification of an EHA Piston Pump by Analysis of Load-Holding States. International Journal of Fluid Power, pages 273–290, July 2024.
[13] Anik Kumar Samanta, Shrinivas Kulkarni, and Nitin Hande. Predictive Maintenance for Axial Piston Pumps: A Novel Method for Real-Time Health Monitoring and Remaining Useful Life Estimation. In 14th International Fluid Power Conference, Dresden, Germany, 2024. River Publishers.
[14] Ajinkya Pawar, Andrea Vacca, and Manuel Rigosi. Prediction of Housing Wear-in in External Gear Machines Considering Deformation Effects. In ASME/BATH 2023 Symposium on Fluid Power and Motion Control, page V001T01A034, Sarasota, Florida, USA, oct 2023. American Society of Mechanical Engineers.
[15] Syed Abu Nahian, Dinh Quang Truong, Puja Chowdhury, Debdatta Das, and Kyoung Kwan Ahn. Modeling and fault tolerant control of an electro-hydraulic actuator. International Journal of Precision Engineering and Manufacturing, 17(10):1285–1297, October 2016.
[16] Vinay Partap Singh, Mikko Huova, and Tatiana Minav. Energy Efficient and Redundant Steer-by-Wire for Articulated Non-road Mobile Machines. International Journal of Fluid Power, pages 291–324, October 2024.
[17] Simo Käki, Vinay Partap Singh, Mikko Huova, and Tatiana Minav. Health Aware Control Design for Extending Remaining Useful Life ofElectro-Hydrostatic Actuator Based Steering. In The 19th Scandinavian International Conference on Fluid Power, SICFP’25, pages 176–186, Linköping University, Sweden, 2025. River Publishers.
[18] Saeid R. Habibi and Gurwinder Singh. Derivation of Design Requirements for Optimization of a High Performance Hydrostatic Actuation System. International Journal of Fluid Power, January 2000. Publisher: Taylor & Francis.
[19] Asko Ellman and Robert Piché. A Modified Orifice Flow Formula for Numerical Simulation of Fluid Power Systems. In Fluid Power Systems and Technology, pages 59–63, Atlanta, Georgia, USA, November 1996. American Society of Mechanical Engineers.
[20] Y. Chinniah, R. Burton, and S. Habibi. Failure monitoring in a high performance hydrostatic actuation system using the extended Kalman filter. Mechatronics, 16(10):643–653, December 2006.
[21] Ahmed Khelassi, Didier Theilliol, Philippe Weber, and Dominique Sauter. A novel active fault tolerant control design with respect to actuators reliability. In 2011 50th IEEE Conference on Decision and Control and European Control Conference, pages 2269–2274, December 2011. ISSN: 0743-1546.
[22] J.M. Grosso, C. Ocampo-Martinez, and V. Puig. A service reliability model predictive control with dynamic safety stocks and actuators health monitoring for drinking water networks. In 2012 IEEE 51st IEEE Conference on Decision and Control (CDC), pages 4568–4573, December 2012. ISSN: 0743-1546.
[23] Juan M. Grosso, Carlos Ocampo-Martinez, and Vicenç Puig. Reliability–based economic model predictive control for generalised flow–based networks including actuators’ health–aware capabilities. International Journal of Applied Mathematics and Computer Science, 26(3):641–654, September 2016.
[24] P. Zhang, W. Jiang, X. Shi, and S. Zhang. Remaining Useful Life Prediction of Gear Pump Based on Deep Sparse Autoencoders and Multilayer Bidirectional Long–Short–Term Memory Network. Processes, 10(12), 2022.
[25] Han Wang, Xiaobing Ma, and Yu Zhao. An improved Wiener process model with adaptive drift and diffusion for online remaining useful life prediction. Mechanical Systems and Signal Processing, 127:370–387, July 2019.
[26] Simo Käki, Vihtori Sova, Luca Romagnuolo, Abid Abdul Azeez, Tatiana Minav, and Simone Bulleri. Experimental Method to Estimate Remaining Useful Life of Gear Pumps. In The 11th International Conference on Fluid Power Transmission and Control (ICFP 2025) Conference Proceedings, pages 160–166, Hangzhou, China, April 2025.
[27] ISO Central Secretary. Hydraulic fluid power — Fluids — Method for coding the level of contamination by solid particles. Standard ISO 4406:2021, International Organization for Standardization, January 2021.
[28] Simo Särkkä. Bayesian filtering and smoothing. Number 3 in Institute of Mathematical Statistics textbooks. Cambridge University Press, Cambridge, U.K. ; New York, 2013.
[29] Karl J. Åström and Tore Hägglund. Advanced PID control. ISA - The Instrumentation, Systems, and Automation Soc, Research Triangle Park, NC, 2006.
[30] Dale E. Seborg, Thomas F. Edgar, Duncan A. Mellichamp, and Francis J. Doyle. Process Dynamics and Control, 4th Edition. Wiley, Hoboken, N.J, fourth edition edition, 2017.
Biographies

Simo Käki graduated with the M.Sc. (Tech.) degree from Tampere University, Finland, in 2024. Currently he is a Doctoral Researcher at Innovative Hydraulics and Automation – IHA, Tampere University, Finland. His research focuses on advanced control of electro-hydraulic systems and extension of remaining useful life of components with intelligent control.

Vinay Partap Singh received the doctoral degree at Innovative Hydraulics and Automation – IHA, Tampere University, Finland. His research explores the intersection of electrification and functional safety in off-road mobile machinery, with elements of AI for steering applications. He now works as a Design Engineer at Danfoss Power Solutions. His research interests include fluid power systems, electro-hydraulic actuators, heavy-duty off-road mobile machines, and safety of novel systems in mobile machinery.

Mikko Huova received the doctoral degree at Tampere University of Technology, Finland, in 2015. Currently he is a Senior Research Fellow at IHA lab of Tampere University, Finland. His research focuses on advanced control, multi-pressure systems, and energy efficient digital hydraulic systems of heavy-duty mobile machines.

Tatiana Minav (ASME and IEEE member) has over 18 years of experience improving the efficiency and sustainability of off-road mobile working machines and innovatively combining signal processing, electrical and mechanical engineering. Since 2019 she has been an associate professor (tenured) in the largest Finnish fluid power laboratory at Tampere University, which specializes in off-road machinery, efficiency, powertrain, fluid power and automation-related topics. Professor Minav has authored ca 180 international scientific publications.
International Journal of Fluid Power, Vol. 27_1, 53–84
doi: 10.13052/ijfp1439-9776.2713
© 2026 River Publishers