An Overview of Energy Savings Approaches on Hydraulic Drive Systems
Anil C. Mahato1 and Sanjoy K. Ghoshal2,*
1Department of Mechanical Engineering, Birla Institute of Technology, Mesra, Ranchi-835215, India
2Department of Mechanical Engineering, Indian Institute of Technology (Indian School of Mines), Dhanbad-826004, India
Email: sanjoy.ghoshal@gmail.com
* Corresponding Author
Received 04 February 2019; Accepted 15 May 2020; Publication 23 June 2020
Abstract
Different procedures to improve the energy efficiency of a hydraulic drive system have been surveyed in this article. The energy-saving approaches are classified into four categories: hybridization, control algorithms, waste energy recovery and reduction of energy losses. Also, the sub-categories of each strategy are discussed individually in brief. The energy efficiency can go up to 69% using a hybridization strategy, whereas using a fuel-saving strategy is within the range of 20–40%. Another strategy, i.e., control algorithms, yields 40% of fuel savings on the displacement-controlled excavator system. Similarly, the maximum potential to recover the braking energy is about 78% in the case of the Constant Pressure System (CPS) system using flywheel under the category of waste energy recovery. Moreover, 56–66.1% throttling energy saving potential is observed on an On/Off high-speed valve-controlled hydraulic system under the reduction of energy loss strategy. Different energy saving potentials of the hydraulic system have been presented in tabular form for a clear understanding of the historical development in this field.
Keywords: Power hydraulic system, energy savings, hybridization,energy recovery, regenerative system, energy loss.
1 Introduction
The resources of the natural fuel are declined successively from the universe, and it also increases the environmental pollution successively. Therefore, now a day, energy-saving is an emerging research area. Hydraulic systems have great potential to fulfill the objective of energy savings as it is used in different applications such as heavy industrial application, earth moving equipment, off-road vehicle, aerodynamic application, etc. The power transmission systems can be classified into three major categories: electrical, mechanical, and hydraulic systems [1]. The electrical system usually uses the battery as an energy storage device [2–4], whereas flywheel and accumulators are used in the mechanical and hydraulic systems as an energy storage device, respectively [3–9]. The electric energy storage device (i.e., battery) has an advantage of high energy density. Still, it has a drawback of lower power density, which makes it suitable only for the marginal recovery of the brake energy. On the other hand, super-capacitor is another energy storage device that provides higher power density and lifetime, but much expensive and comparatively less reliable as compared to the battery [10]. The energy-saving on a hydraulic system is a promising technology due to its high capability to recover the waste energy and its higher specific power output potential. Also, the equipment using hydraulics is safety-critical. The procedure of energy saving by using a hydraulic system may be categorized as hybridization, control algorithms, waste energy recovery and reduction of energy losses from the system [11–13].
The energy-saving by hybridization includes different types of hybrid systems such as hydraulic hybrid, electric hybrid, etc. The hydraulic hybrid systems are subdivided into two categories according to the configuration of the energy storage device (hydraulic accumulator) in the hydraulic system, i.e., Parallel Hybrid (PH) and Series Hybrid (SH) [14–16]. In both the hybrid systems, the energy lost during braking stage is stored into an energy storage device, and it is reused as per the requirement in an effective way [17]. The hybrid system is mostly used in heavy commercial vehicles such as trucks, excavators, city buses, earthmover, etc., to reduce the braking energy loss, which is accumulated during the start and stop phases of the vehicle. The start or stop processes are very frequent in these vehicles due to their different function engagement. Many of the researchers concentrated on the electric hybrid system in different forms, such as battery/super capacitor, fuel-cell/super capacitors, battery/fuel-cell/super capacitor, etc. [18–23]. In [24], the authors described dynamic modeling of a series hydraulic hybrid system by the use of bond graph technique. Also, an optimization technique, Broydon Fletcher Goldfarb Shanno (BFGS), was used to optimize the physical and process parameters of the system for its better performance and energy efficiency. It was also observed that the optimization helped to increase the energy efficiency of the system by 3.6%. In [25], Huiand Junqing discussed an energy-saving strategy by considering a parallel hydraulic hybrid loader. The loader is quite heavy equipment and it involves frequent braking cycles for loading and unloading that lead to the generation of heat in the system. Also, the braking increases the waste energy from the system. The single energy storage systems have a drawback that cannot satisfy both the energy density and the peak power requirements of the heavy vehicle [26]. To overcome the drawback of the single storage system, many of the researchers used multi-energy storage resources for hybrid vehicles [27, 28]. A similar concept was adopted in [29] to improve the process of a hybrid strategy, where both the hydraulic and the electrical systems were hybridized in a single system. For further improvement, Do and Ahn [30] discussed a pressure coupling and a flow coupling configuration of the hydrostatic transmission system for reducing the energy consumption of the engine by recovering the braking energy. It was observed that the flow coupling configuration consumed less amount of fuel as compared to the pressure coupling configuration.
Similarly, the system efficiency can be improved by reducing the energy consumption of the system, and it can only be fulfilled by improving the efficiency of the equipment. The efficiency of the equipment can be enhanced by applying a suitable control algorithm on the equipment, effective design of the system, proper selection of the equipment, etc. In this respect, different control strategies such as swashplate control on variable displacement pump or actuators [31, 32], different valve-controlled approaches [33] and power supply unit control [13] can be applied at a different level. Also, the system efficiency depends on how different components of a hydraulic system are combined to meet the specific user demand and selection of equipment. The different available efficient combinations of the hydraulic systems are variable displacement hydraulic pump/fixed displacement hydraulic motor; fixed displacement hydraulic pump/hydraulic motor connected with a variable frequency drive electric motor; fixed displacement hydraulic pump/flow and direction control valves/hydraulic motor, etc. [34, 35].
Another noteworthy means to improve the hydraulic system’s performance is to recover the waste energy from the system by using the regeneration technique. By applying a control strategy on the volume displacement rate of the hydraulic pump/motor, the system works at two different modes, i.e., driving and braking. In the driving mode, the system drives the load, whereas load works as a power source during the braking mode. The energy is transferred from different sources (hydraulic motor, flywheel or charged accumulator) to the driven components during the driving mode, whereas in braking mode, the energy flows in the opposite direction, i.e., from the driven components to the source. The recovered kinetic energy of the load is about 32–66% by using an accumulator [36–38] and around 61% by using a flywheel [39]. A combination of an accumulator and flywheel can recover the energy as high as 63.4 % to 78 % [40, 41].
A massive amount of energy can also be saved by reducing the energy losses from the hydraulic system. In comparison to the other systems (i.e., electrical or mechanical), the hydraulic system possesses less energy efficient, which stems from multiple sources [34]. Hydraulic moving elements such as a hydraulic motor, pump, controlled valves, and cylinders involve frictional and leakage losses, as a result of which the system efficiency decreases. Also, the pressure drop through the fittings and pipes contributes to the energy loss from the system. Apart from that, energy is lost due to controlling of the hydraulic system. Usually, flows of a hydraulic system are controlled by the control valve or throttle valve. These valves exhibit throttling energy loss during the transition of the valve spool [42]. The throttling energy loss is considered too high in comparison to the other losses in the hydraulic domain and its amount to 60% of the total loss [43]. Therefore, the present research is focused on the reduction of the throttling loss rather than reduction of other losses like frictional and leakage losses, compressibility loss, and loss due to pressure drop in pipe fittings. Some of the recent literature [44–48] discussed different schemes to reduce the throttling energy loss of an On/Off valve-controlled power hydraulic system. Those literatures [44–48] are motivated by the concept of soft switching and developed mathematical models of the soft switch. Also, the dynamics of the soft switch and its function have been studied in detail and thereafter validated experimentally. It is observed that the throttling energy loss is reduced by 56-66.1% by using the soft switch.
This article reports a brief survey of different energy savings strategies used in the hydraulic drive system. Also, it presents multiple probable sources of energy losses from the system, which may encourage the research of energy savings related to power hydraulics. The ways of energy saving i.e., hybridization, control algorithms, waste energy recovery and reduction of energy losses, are discussed individually in brief. A comparative study has been prepared at the end to present in a nutshell the energy-saving potential in a hydraulic system by using different strategies.
2 Different Strategies of Energy Saving
2.1 Energy Savings by Hybridization
The hybridization process can decrease the fuel consumption of the hydraulic system. Hybrid systems are those which consist of two different power sources and kinetic energy recovery technology. The feasible combinations of these two distinct power sources may be gasoline/hydraulic (hydraulic hybrid), gasoline/electric (electric hybrid), fuel cell/battery (fuel cell hybrid), and likes. Normally, one source converts the chemical energy of the fuel into potential energy, whereas other source works as a storage system. Generally, in the conventional vehicle, the kinetic energy of the wheel is lost as heat energy during mechanical friction braking. However, in a hybrid system, a regenerative technique is employed to reuse the kinetic energy during the acceleration of the vehicles [49]. The hybrid systems are categorized into two types: Electric Hybrid (EH) and Hydraulic Hybrid (HH). In the EH system, an electric battery is used to capture the regenerated energy and releases it when the vehicle is in acceleration mode. Many of the famous automobile companies (Toyota Motor, Hyundai Motor, Honda Motor, Kia Motor, Ford Motor, etc.) have adopted this EH concept and manufactured different car models such as Toyota Prius, Honda Insight, Ford Escape, etc. [50, 51]. Again, the EH systems are divided into two categories, series EH and parallel EH, which are shown in Figure 1(a) and 1(b), respectively. The parallel EH permits both electric motor and the engine to deliver power in a parallel way to drive the wheels. In contrast, series EH allows the electric motor/engine to deliver power in series to drive the wheels. Generally, both the electric motor and engine are coupled via two clutches to drive the wheels. The impulsive power may be supplied by the engine alone, or by the electric motor or by both. The parallel EH has got some advantages over the series EH. It has two impulsion devices: the electric motor and the engine, and also, smaller in engine size. The electric motor can be used to obtain the same performance until the electric energy storage system (electric battery) is worn-out [52–54]. Similarly, in the HH system, an accumulator is used to store the regenerated energy. The EH system possesses less round-trip efficiency (81%) than the HH system (94%) [15]. The round-trip efficiency is the ratio between the energy put into the energy retrieved from the storage. Higher round-trip efficiency conveys higher energy recovering efficiency potential. Thus, the energy recovering efficiency of the electrical system is less (53%) than the hydraulic system (69%) [15]. The accumulator used in a HH system, experienced high-power density as well as faster charging capability of regenerated energy in comparison to the EH system. Therefore, the HH system is used in construction machinery, heavy vehicles and agriculture machinery. Conversely, the electric battery possesses high energy density as compared to its counterpart [10, 55]. Again, according to the system configurations, the HH systems are categorized into a parallel hydraulic hybrid (PHH) and a series hydraulic hybrid system (SHH). In the PHH system, the power from the engine/the prime mover reaches the output shaft via two different parallel paths i.e., via hydraulic transmission and mechanical transmission, which is as shown in Figure 1(c). But in the SHH system, the input power passes through a purely hydraulic domain of power transmission, which is presented in Figure 1(d). The PHH system provides better efficiency of power transmission but exhibits poor controllability on the power distribution system in comparison to its counterpart because it transmits the power into two different paths as well as domains [56]. On the other hand, the series configuration transmits the power in a single domain [15, 57]. The fuel-saving potential for PHH is about 10-25% and the same for SHH is about 20–40% [15]. Aside from these two hydraulic hybrid power transmissions, another hybrid power transmission is Hydro-mechanical transmission (HMT) or power-split hydrostatic transmission. HMT is designed in such a way that it combines the positive aspects of both hydraulic hybrid power transmissions (i.e., SHH and PHH). In this hybrid transmission, a couple of hydro pump/motor and a planet gear transmission are used to transmit the power. It permits a fraction of power to be transmitted mechanically and the engine to operate at arbitrary operating points. HMTs are different types, such as input-coupled HMT, an output coupled HMT, and compound HMT [58]. In input-coupled HMT, the engine power splits with a fixed gear into a mechanical path and a hydraulic path, whereas the output-coupled HMT is just reversed configured to that of input-coupled HMT. In output-coupled HMT, the engine power is split into the hydraulic path and mechanical path using the planetary power-split device. Another, a compound HMT, is configured when both input-coupled and output-coupled HMTs are combined. An input-coupled HMT is shown in Figure 1(e). In [58], Cheong et al. addressed a computational mathematical approach to optimize the configuration and sizes of the hydraulic pump/motor of a compound HMT system. The authors utilized a generalized kinematic relationship of the transmission to analyze all three configurations of HMTs. Another similar study which is based on the optimization of the structure and the components of the hydro-mechanical transmission system is presented by Rossetti et al. [59]. The structure is implemented by means of graph theory, whereas the components are described by their functional models. The well-known Direct Search Algorithm based on Particle Swarm Optimizer theory is applied to obtain the optimization results for the subjected problem. Furthermore, the established optimization procedure is applied in the high-power agricultural tractor transmission. It has been found that the efficiency is slightly higher when proposed algorithm is used in the high-power agricultural tractor-transmission.Presently, many research articles are available on the same topics [60–62]. Also, in [63], Du et al. presented a comparative analysis between three different hydraulic hybrid systems i.e., SHH, PHH and HMT, based on their fuel economy and engine operation. It was found that HMT architecture had a better fuel economy than the other two SHH and PHH architectures.
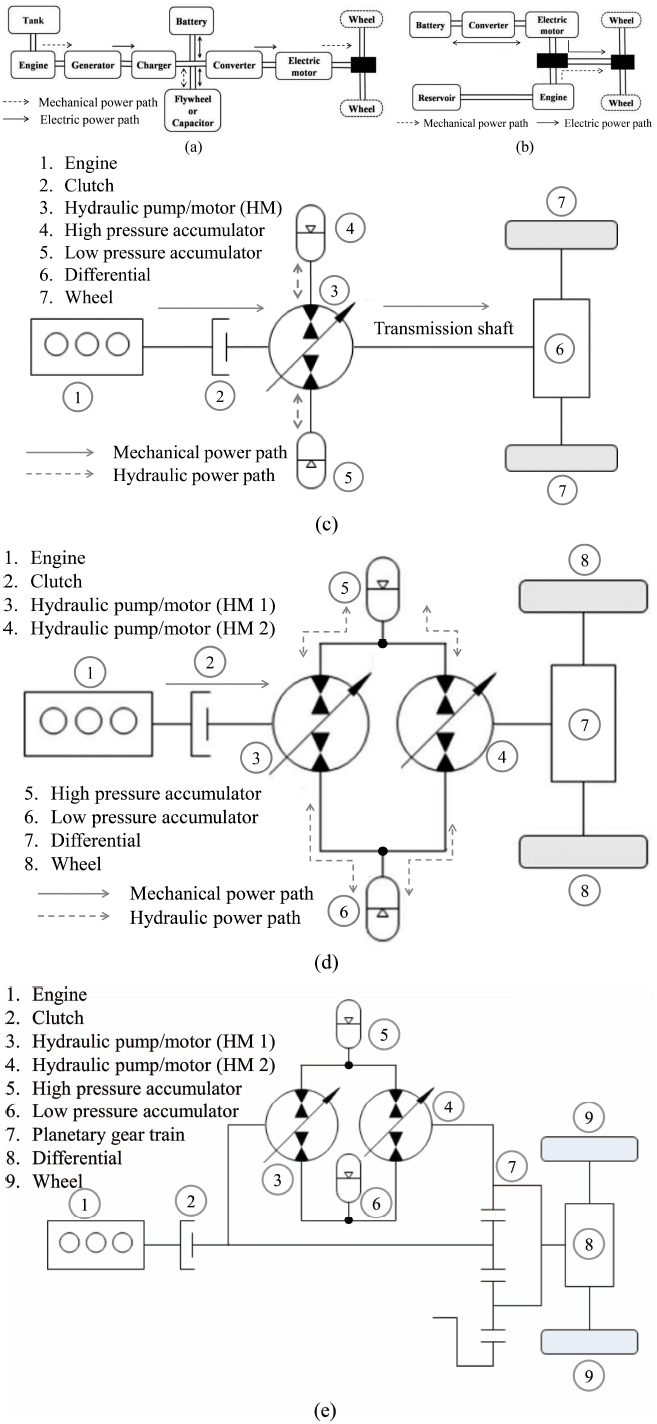
Figure 1 (a) Series electric hybrid (EH) system (b) Parallel electric hybrid (EH) system (c) Parallel hydraulic hybrid (PHH) system(d) Series hydraulic hybrid (PHH) system (e) An input-coupled Hydro-mechanical transmission (HMT) or power-split hydrostatic transmission.
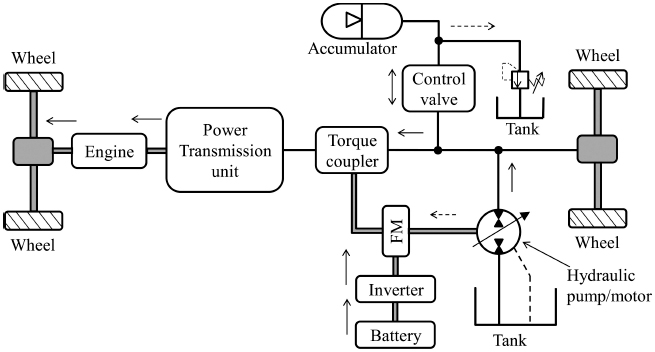
Figure 2 Hydraulic-electric synergy system (HESS).
In the heavy vehicle, the single energy storage system does not satisfy both energy density and peak power requirements at a time [26]. To overcome the drawback of a single storage system, researchers adopted a new concept of multiple energy storage resources for hybrid modeling, as reported in the literature [27, 28]. In [29], Hui et al. designed a combined hydraulic-electric synergistic system (HESS) where both the accumulator and the battery are coupled into the hybrid system. That means both the electric regenerative system and the hydraulic regenerative system are combined in a single system (refer Figure .2) The essential equipment of any hybrid system is an engine, a variable displacement hydraulic pump and hydraulic motor, an accumulator, a reservoir, a battery, an electric motor, transmission and DC/DC converter [29]. In an electric regenerative system, the battery is coupled with the electric motor through a DC/DC converter that delivers a directional current. Generally, the equipment of the hydraulic regenerative system is coupled to its drive shaft through torque coupler at a stable speed ratio.
The HESS contains one accumulator which absorbs the power from regenerative braking and supplies its stored energy to the vehicle during startup and emergency acceleration situations as a secondary power source. During braking conditions, the generated braking energy charges the high-pressure accumulator. The hydraulic pump/motor uses the pressurized fluid and produces torque in the next start of the vehicle and acceleration [64, 65]. In HESS, the accumulator restricts the function of the electric battery in a limit of a state of charge (SOC) characterized by higher efficiency region, which fends off different generated issues i.e., heat generation, destruction, etc. The power of the electric battery is allowed only when the vehicle is in the cruise of power or has a high power demand. The electricity consumed by the hydraulic-electric hybrid vehicles is about 11.4% less than the conventional purely electric vehicles [17].
2.2 Energy savings using different control algorithms
Another way to boost the energy efficiency or the performance of the hydraulic system is to applying different control algorithms on the equipment. The control algorithms are mainly applied on the movable hydraulic equipment such as hydraulic pump/motor, On/Off valve, actuator, etc. [66]. There are mainly three types of control algorithms such as valve-controlled approach [33, 67], swash plate control on variable displacement pump or actuators control approach [31, 32], and power supply unit control approach or Electro-hydraulic actuators (EHA) [13]. All of these control approaches can be applied at different levels in the hydraulic system.
2.2.1 Valve controlled hydraulic system
The valve controlled hydraulic system is widely used in industrial applications due to its higher controllability and better performance. It also has fast response characteristics, but less energy efficient [68–70]. A valve controlled hydraulic system consists of different hydraulic equipment such as a hydraulic pump (variable/fixed displacement), pressure relief valve (PRV), an actuator (hydraulic motor or hydraulic cylinder), an electric motor and a flow modulated control valve. Figure 3(a) refers to a simple valve controlled hydraulic system which consists of a fixed displacement hydraulic pump, a flow control valve and a pressure relief valve. The hydraulic pump is driven by an electric motor and it always supplies a fixed flow (Qs) to the flow control valve. The flow control valve works in user-control mode in open-loop as per the load of the system. If the load demand flow (Ql) is less than the pump supply, high pressure is developed on the pump plenum. When the pump pressure (Ps) reaches the cracking pressure of the PRV, the PRV allows excess flow (Qs–Ql) back to the tank. In this system, the pump pressure is now at a value dictated by the pressure relief valve setting.Hence, PRV helps to maintain the supply line pressure within the safety region. A drawback of this system is observed in the form of pressure drop loss through the PRV and the flow modulated control valve. The shaded area of Figure 3(a) represents the power loss through the PRV and flow control valve (CV) of the system. The efficiency of the circuit is significantly decreased whenever the load demand flow (Ql) and the load demand pressure (Pl) is decreased. This type of system is inefficient due to high power loss.
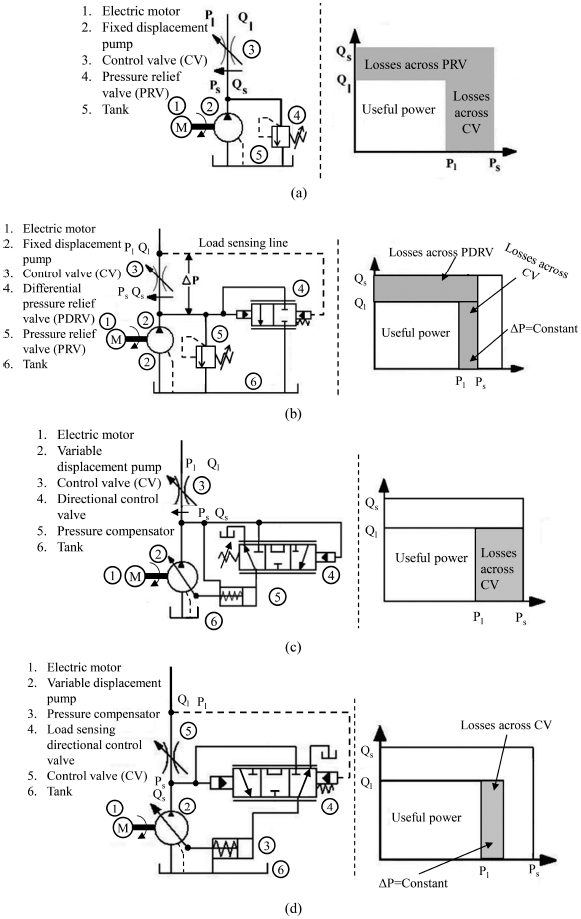
Figure 3 Power losses of different valve-controlled hydraulic systems.
To improve the overall efficiency of the hydraulic system, we additionally incorporate a load sensing Differential Pressure Relief Valve (DPRV) into the system to sense the load pressure as shown in Figure 3(b). The DPRV is designed to maintain a constant pressure differential between any two pressure points in a system, and it is operated hydraulically and by a pilot-controlled, modulating valve. The valve is actuated by line pressure through a pilot control system sensing from two points across which a pressure differential is to be maintained. The operation of the valve is entirely automatic, and pressure settings can be changed easily. In operation, the DPRV tends to open when the differential pressure increases, and it tends to close when the differential pressure decreases. In this system, the cracking pressure of the PRV is set so that the excess flow of the system is passed through the PRV only when the pump pressure lies between the set pressure range of the PRV. Otherwise, the excess flow of the supply line passes through the DPRV. This system is similar to that of the conventional hydraulic system except that of the “effective” relief valve setting. Therefore, the pressure drop loss of the system is deceased through the PRV (refer shaded area of Figure 3(b)) [34] and hence, increases the overall efficiency of the system.
For further improvement of the overall efficiency of the hydraulic system, the fixed displacement hydraulic pump is replaced by a ‘pressure compensated’ hydraulic pump, where the pump supplies only that much flow which the system demands. This system is named as a demand flow system, shown in Figure 3(c). The pump always maintains a fixed pressure using the pressure compensator, and in such cases, the pump should be a variable displacement pump. The energy loss through the control valve is minimized. However, it still exists the metering loss across the control valve (refer Figure 3(c)) [34].
Furthermore, to enhance the overall efficiency of the system, the concept of Figure 3(b) and 3(c) are combined and develop a load sensing system using a load sensing directional control valve (shown in Figure 3(d)). The function of the load sensing directional control valve is to sense the load pressure and adjust the volume displacement rate of the pump using the pressure compensator. This type of system is mainly used in mobile hydraulics as a driving concept with high efficiency [71]. The variable displacement pump delivers flow as demanded and keeps the line pressure higher than load pressure. The power loss in the load sensing system (shown in Figure 3(d)) is minimized as compared to the other three systems.Therefore, the overall efficiency of the load sensing is higher than the other three systems and the same analysis is presented by Liang and Virvalo in [72].
The load sensing system is mostly used in single load applications. However, many multi-user systems are also based on load sensing architecture. In these systems, two or more actuators activated simultaneously with different loads. The efficiency of the load sensing multi-user system is lower with respect to the case when only one actuator is fed into the system. This is due to the loss of pressure drop across the multiple valves and the actuators. It accumulates some power loss from the system. Also, risk of instability is another issue for a load sensing system when it is used in a multi-load application. This issue is observed on the load sensing line. The stability of the load sensing system can be improved by incorporating hydraulic signal filters (i.e., a combination of check valves, orifices, and accumulators) into the load sensing line. But that signal filter may slow down the dynamic response of the system. The dynamic response of the load sensing system can be improved by using electric hydraulic load sensing systems [71, 73, 74], where the load sensing line is replaced by an electric signal line that contains a pressure sensor, electrical controller/filter and a load sensing electrically controlled pump. Still, the system exhibits a slow dynamic response. Mansouriet al. used a latching valve that controlled the flow output to facilitate a variable flow supply into the system, as shown in Figure 4 [75]. The latching valve works on switched-mode control technology. The valve switches it on/off position extremely rapidly, but remains latched in the closed or open position using residual magnetism that is used to control the output flow in order to obtain a variable flow supply (refer Figure 4). The pump supply is directed towards the accumulator or the loading side whenever the latching valve is in the off position or closed position. Adversely, when the latching valve is in the open position, the flow is “shorted” back to the inlet of the hydraulic pump (at low pressure). Hence, the flow could be modulated with minimal losses. The energy of the system can be saved using this approach as compared to the conventional variable displacement pump controlled hydraulic system, especially at partial load conditions of the pump [34].
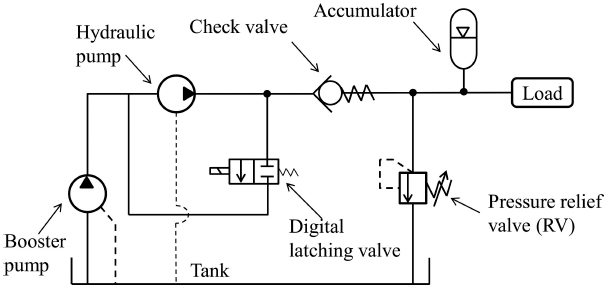
Figure 4 Variable flow using latching valve.
In the current trend, the normal flow control valve is replaced by an electrically controlled valve. The normal flow control valves which are operated mechanically show a significant pressure drop loss across the valve due to its inefficient switching processes. However, when the flow control valves are operated by an electronic signal, the pressure drop loss across the valve is decreased due to the precious and efficient energized/de-energized processes. The electronically controlled valves sense the sensor signal, and accordingly, it energized/de-energized. The response time of these valves is very high. Hence, it reduces the energy loss of the system and increases the energy efficiency of the system. A typical power hydraulic system with 4/3 (four-way three-position) proportional valve is shown in Figure 5(a). The controllability is highly important for the proportional valve or the servo valve controlled hydraulic system. It indirectly affects the energy efficiency of the system. The meter-in and meter-out concepts are introduced to improve the controllability in the hydraulic circuits. In this concept, the pressure and the flow rate in the inlet/outlet of the hydraulic actuator are controlled by a servo valve or a proportional valve separately (refer Figure 5(b)). The servo valves are controlled electronically, and it is embedded with electronic control algorithms. In the meter-in circuit, the inlet flow of the actuator is controlled. When the actuator works against an overrunning load, the weight of the actuator assists the extension operation of the actuator. It makes the extension operation is faster than when the controlled supply is subjected to the actuator. As a result, a cavitation issue is formed into the cylinder. Therefore, the meter-in flow control concept would not perform well when the system work against the overrunning load. Besides, the meter-out circuit restricts the outlet flow of the actuator. This offers a significant resistance to the overrunning load. These systems possess a significant pressure loss across the meter-in and meter-out orifices of the valve. Liang et al. [76] changed the configuration of the same system without altering its function, as shown in Figure 5(b). It allowed to control the meter-in or meter-out orifices of the valve and thereby improved the efficiency of the system.
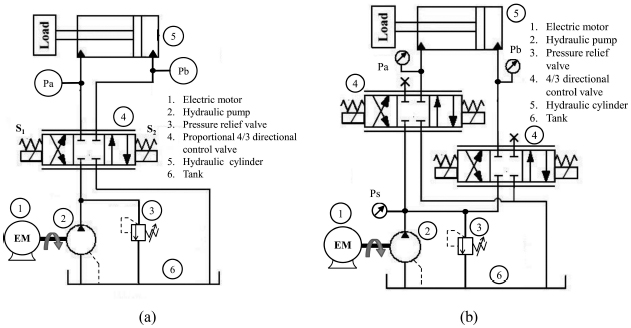
Figure 5 Hydraulic system with metering-in and metering-out control of the valve.
The Load Sensing technique is used in different earth moving equipment (excavator, loader etc.), agricultural tractor etc. In [77], Bedotti et al. deal a load sensing hydraulic system of the excavator to improve the energy efficiency of the system. To fulfill the objective, authors, first, evaluate the energy losses and the potential for energy recovery scope. The major energy loss contribution i.e. almost 45% of total energy loss is observed through the meter-in and meter-out orifices of the directional flow control valve and the pressure compensators on the subjected load sensing system. Authors have provided different effective solutions to reduce these energy losses by introducing a secondary Load Sensing pump. It helps to supply the flow to the actuators according to their individual loads, as results, it reduces the pump margin setup and hence reduces the meter-in loss without affecting the excavator performance. Also, the amount of energy (20%) that is lost through the meter-out orifices in the form of heat is recovered through energy recovery system. The benefits and demerits of each proposed solutions regarding the energy analysis are discussed.Lastly, the most effective combined solution has led towards the development of a new hydraulic hybrid architecture of the excavator with a 15% of fuel saving potential. Another work which is based on individual metering concept for analyzing the energy of a remote valve controlled hydraulic load sensing multi-actuator circuit of a medium-sized agricultural tractor is discussed by Borghi et al. [78]. In this work, the traditional single spool valve controlled load sensing architecture is replaced by an alternative independent metering valves controlled architecture. The single spool remote valves and variable displacement pump with flow compensator of the traditional load sensing circuit is replaced by an independent metering valves and electronically controlled variable displacement pump, respectively. The proposed hydraulic architecture helps to reduce the pressure drop loss in the meter-out sections of the remote valves and the pressure compensators acting at the inlets of the lower loaded actuators of the traditional load sensing circuit. The simulation results of both traditional and alternative architectures are compared and it is concluded that a significant amount of energy can be saved due to the collective use of the independent metering concept and electronic control of pump displacement.However, much scope remains still there to improve the overall efficiency of the valve controlled hydraulic system.
2.2.2 Displacement controlled hydraulic system
The displacement-controlled power hydraulic drive system consists of a variable displacement hydraulic pump, control valve, actuator etc. A pump control hydraulic system is one of the displacement-controlled hydraulic system and it is preferred in the application where large horse power is essential. The actuator (cylinder or motor) is controlled by controlling the pump displacement. The pump controlled system eliminates the dependent loss (pressure and flow losses) from the system and enhances the energy efficiency of the system. The displacement-controlled hydraulic system is used in different mobile/off-road applications such as wheel-loader, skid steer loader, excavator etc. The amount of fuel saving in all these applications are different i.e. fuel savings is about of 15% on a wheel loader [79], skid steer loader shows 20% fuel saving [80] and the fuel saving in the excavator is about of 40% [81]. The pump-controlled hydraulic system is categorized into two different systems, i.e., open-loop circuit type and closed-loop circuit type [82], which are shown in Figure 6(a) and 6(b), respectively. An open-loop system allows the hydraulic pump to draw its flow directly from a reservoir and returns it back to the reservoir after performing its function. In contrast, the return flow path is directly connected to the pump inlet in closed-loop system. However, the leakage flow returns to the reservoir and to replenish that a booster or charge pump is required for closed loop system. The pump displacement control depends on the swash plate angle of the hydraulic pump which is controlled typically by a servo system. Variable displacement hydraulic pumps are widely used in hydraulic system for providing better efficiency, higher power density and enhance versatility of the system. Besides, another emphasis of the swash plate controlled hydraulic pump is to reduce the sound that is generated from the fluid turbulence and the pressure ripples. The sound is generated into the hydraulic pump is due to the existence of the alternating forces inside the pump body and downstream components. During designing of the modern variable displacement hydraulic pump, it is taken care of by precious design of the valve plate. Thus, the swash plate control hydraulic pump reduces the noise level of the system and maintains the health of the pump as well as the hydraulic system that indirectly influences the system efficiency.
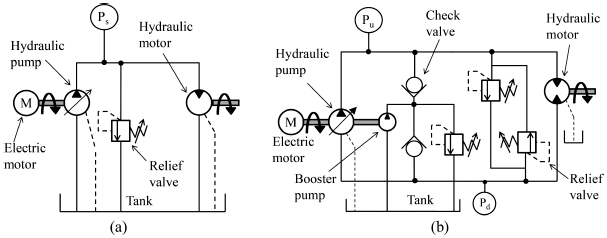
Figure 6 (a) A typical pump controlled open-loop hydraulic system and (b) closed-loop hydraulic system.
2.2.3 Electro-hydraulic actuator (EHA) systems
Most of the machines can perform multiple functions using at least a single actuator. For example, a wheel-loader performs two functions: lifting and tilting using a hydraulic cylinder (actuator) powered by a pump. The actuator’s flow is controlled by a directional controlled valve [83]. Nowadays, the traditional hydraulic systems are being replaced by a few modern machines with electro-hydraulic actuator (EHA) systems to obtain better energy efficiency from the hydraulic system [83]. Previously, this technology was successfully used in wind turbine pitch control [84] and hydraulic injection molding machines [85]. The basic operational principle of the EHA systems is similar to the closed-loop hydrostatic transmission. This type of system consists of a variable speed electric motor, a fixed displacement hydraulic pump, actuators and control valves. The fluid flow to the actuator is mainly controlled by the electric motor by changing its speed and direction. The controller receives the control signal, i.e., information of actuator piston displacement, and transmits the same to the electric motor. After receiving the control signal, the speed or the direction of the electric motor changes; as a result, the hydraulic pump supplies controlled flow to an accumulator. The electric motor receives power from a generator or an energy storage device (battery) or both [83–87]. The EHA-HST system uses electric batteries or capacitors as a storage device. It possesses high energy recovery potential and good system performance. Also, EHA is more liable to cross-coupling effects in a multivariable system [88]. The EHA system has some drawbacks, such as it requires more electric devices which may lead to high installation cost [36, 41], and it decreases the stiffness and the frequency width [89]. To overcome the stated issues, Rongjieet al. (2009) discussed an innovative scheme of the EHA system, which was related to a power regulator that increased the system performances through optimization of the supplied power [90].
2.3 Energy savings by waste energy recovery
Heavy commercial vehicles, i.e., tractor, truck, earthmoving machinery, city bus, etc., have a character to change the modes (starts/stops) very frequently. The hydraulic systems which are used in commercial vehicles can be divided into three different operating modes: driving mode, cruising mode, and braking mode [24]. In driving mode, the energy is transferred from the primary source (engine, high-pressure accumulator, or flywheel) to the driven component of the system. In cruising mode, the hydraulic power source (accumulator) is in cut-off mode, only flywheel or prime mover supply the power to the driven member. On the other hand, in braking conditions, the excess kinetic energy of the system is converted into heat energy by friction in the brakes. The generated heat energy is recovered using an electric motor that works as a generator. A regenerative concept can be adopted for further improvement of the overall efficiency of the system. Some energy recovering hydraulic systems have been developed previously, like secondary control systems using common pressure rail (CPR), electro-hydraulic actuators (EHA), and constant pressure system (CPS) using a flywheel [30].
2.3.1 Common pressure rail (CPR) HST system
The common pressure rail system was first developed in 1980. Subsequently, many researchers studied the same topic [91–94]. Generally, the CPR consists of two lines: the high-pressure line and the low-pressure line. High-pressure rail is directly connected with a high-pressure accumulator, whereas the low-pressure line is connected with the reservoir or a low-pressure accumulator. Thus, many of the secondary units perform functions simultaneously and separately. The pressures of the systems are mainly controlled by the hydraulic pump, whereas the secondary unit controlled the speed of the load by adjusting its displacements. In driving conditions, the secondary unit works as a motor and drives the load. But, during deceleration, it performs as a pump to store the energy. The accumulator is used for twin purposes, storing the recovered energy and generating system pressure as per the demand. Overall, the CPR system shows good energy recovery potential as well as satisfactory performance [36]. The disadvantage of the CPR system is that its efficiency depends on the secondary unit, particularly the swash plate of the motor, which is reduced significantly with low speed due to high load in case of pressure compensation. The schematic diagram of the CPR system is shown in Figure 7, which is proposed by Ho and Ahn [36]. In that literature [36], a pressure coupling configuration of the HST system is proposed, and the results are compared with the traditional HST system (pressure coupling mode). The CPR system used two hydraulic accumulators and two-directional control valves. The system is designed with the energy recovery capability of the secondary control system. It played two important roles: in the CPR system, it recovered the kinetic braking energy and reused it and, secondly, functioned as a traditional HST under full load conditions that improved the efficiency as well as system performance. The results showed that the energy recovery potential is dependent on the displacement of the pump/motor, and it varied from 32% to 66%.
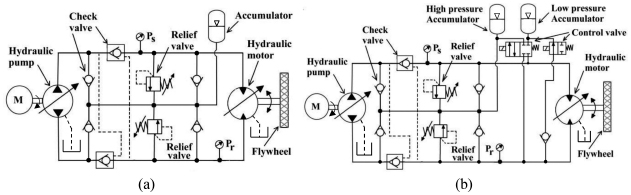
Figure 7 (a) Traditional hydrostatic transmission configuration (Pressure coupling mode) (b) Pressure coupling configuration of the system.
Further, to improve the CPR system and its energy efficiency, Do and Ahn modified the aforesaid CPR system by eliminating the directional control valves [41]. The modified CPR system is presented in Figure 8. The results of the system show that the regenerative efficiency of the system is about 63.4% as compared to the conventional HST system.This system has some limitations such as it cannot work in the four quadrants (two directions of rotation of the motor and two directions of load), since the upper line is always the high pressure line, while the lower one is always at low pressure.
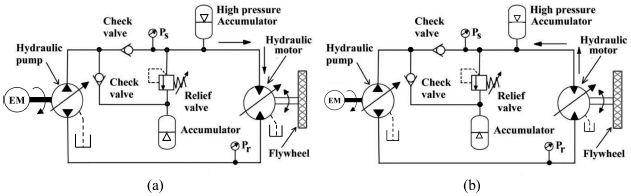
Figure 8 (a) Driving phase of the CPR-HST system [41] (b) Braking phase of the CPR-HST system [41].
2.3.2 Constant Pressure System (CPS) using a flywheel
The braking energy of the vehicles/machines can be recovered by the concept of a constant pressure system (CPS) using a flywheel [30]. This system consists of an auxiliary hydraulic pump/motor each along with a prime over or flywheel so that it can recover the braking kinetic energy of the load and thereafter, reuse the recovered energy. During braking, the kinetic energy of the flywheel returns to the hydraulic pump through hydraulic motor and load. Many researchers studied earlier on the CPS system [30, 36, 39, 95] to improve the performance of the system. Previously, the effectiveness of the CPS system was analyzed by simulation, and it was found that the kinetic energy of the load could be recovered by 50%. But, those systems exhibited some drawbacks: it generated pressure spikes during the change of the displacement of the pump/motor, which restricted its applications. Also, it was not possible to control the wheel as well as the flywheel of the system. To overcome those issues, Ahn et al. proposed a switching type closed loop CPS (SCL-CPS) system, shown in Figure 9 [39].
The SCL-CPS in Figure 9 is a closed-loop hydrostatic transmission system that comprises two variable displacement pump/motors, two accumulators, two relief valves, three electric clutches, and one flywheel. Two different pressure lines: driving lines and recovery lines work, alternatively as per the change of the displacement of the pump/motors. During the driving condition, the driving line becomes a high-pressure line, whereas, in the braking phase, the recovery line is the high-pressure line. The responses of the said system confirmed that the energy efficiency of the proposed SCL-CPS system could be improved by about 61% by recovering the braking energy of the load [39]. The number of the components for the CPS system is more as compared to the normal hydraulic system, and the efficiency of the CPS system depends on the individual efficiency of the equipment. Therefore, if the efficiency of the hydraulic pump/motor or other equipment is low, then the overall round-trip efficiency of the CPS system is affected. Hence, expensive and efficient equipment is highly favorable to increase the overall efficiency of the CPS system.
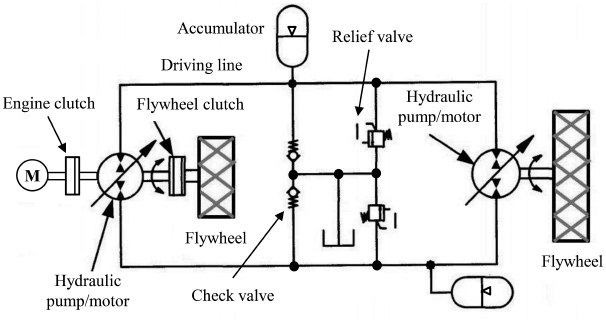
Figure 9 Switching type closed loop CPS (SCL-CPS) system.
For further development, Triet and Ahn [40] had proposed another CPS hydraulic model as shown in Figure 10. It is comprised of two variable displacement pump/motors, one 4/3 directional control valve, two clutches, one high and one low-pressure accumulator and two flywheels. Accumulator functioned as a hydraulic energy storage device, whereas flywheel is used for mechanical energy storage.The flywheel provides higher specific energy and it is important for mobile applications. Another characteristic of the same system is: energy recovery potential and pure hydraulic coupling from the primary source to the load. Authors simulate the developed mathematical model and results are validated experimentally. The experimental results confirmed that the proposed system could be applied for mobile applications. Also, this system not only achieved a benefit from the energy-saving point of view, but also provides better driver comfort in the mobile application. Moreover, it eliminates the hydraulic shock issues due to its fluid flow characteristic in one direction only. The proposed system is categorized as hydro-mechanical hybrid system and it enhances the energy recovery potential of the system is up to 78% due to the regenerative braking.
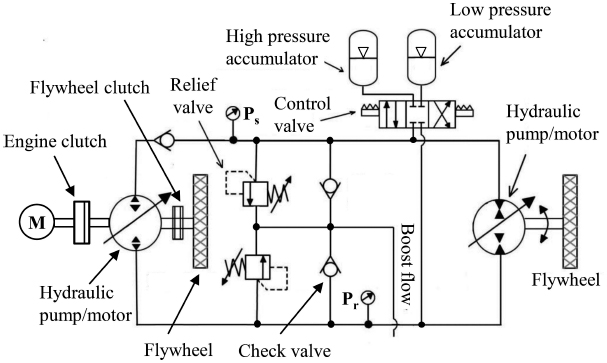
Figure 10 CPS hydraulic model proposed by Triet and Ahn [40].
2.4 Energy savings by reducing the energy losses
The energy savings of a hydraulic system by reducing its energy losses from different sources is the most promising research in the power hydraulics field. The power hydraulic system possesses less energy efficient in comparison to other systems like mechanical and electrical due to multiple sources of energy loss. The movable elements of the hydraulic system are one of the significant sources of energy loss, and these experience fluid frictional and leakage losses. Apart from that, fluid compressibility loss, accumulator hysteresis loss, pressure drop loss, and valve transition loss are realized into hydraulic drive systems [42, 96, 97]. Fluid compressibility loss depends on the bulk modulus of the working fluid, and its numerical value is minimal as compared to the other losses, and most of the cases, it is neglected. A significant amount of pressure drop loss is realized during the fluid flow through the pipes and fittings of the hydraulic system. Another transition loss is caused by the control valve or throttle valve in the hydraulic system. The throttling energy loss of an On/Off high-speed valve-controlled hydraulic system constitutes the significant energy loss, i.e., 60% of the total loss, whereas fluid compressibility loss is about 20% and the full open throttling loss and the leakage loss are 19% and 1%, respectively [44]. Therefore, the research is mainly focused on the reduction of throttling energy loss rather than reduction of other energy losses (frictional and leakage losses, compressibility loss, loss due to pressure drop in pipe/fitting).
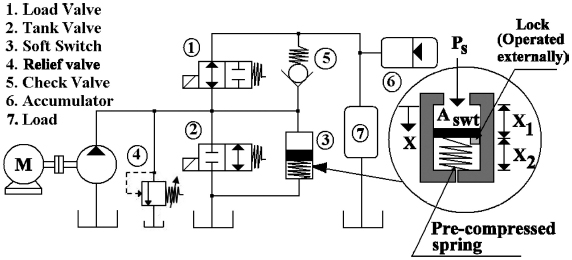
Figure 11 Soft switch with valve-controlled hydraulic system.
To increase the energy efficiency of the valve controlled hydraulic system, Tu et al. proposed a unidirectional rotary valve for pulse width modulation (PWM) of the hydraulic flow [97]. It helped to fast switching, as a result, reduced throttling and pressure drop losses. In [44], Rannow and Li introduced a novel idea with a soft-switching concept in the on/off controlled hydraulic system. The function of the soft switch was to store the high pressure switched volume fluid into its cylindrical chamber during the valve transition, temporarily. The proposed soft switch with a valve-controlled hydraulic system is shown in Figure 11.
The soft switch is comprised of a cylindrical chamber, compression spring, piston, and external locking mechanism. Initially, the piston is locked at the middle position of the cylindrical chamber. The simulation results indicate that the soft switching approach reduces the throttling and compressibility loss by 81% and total energy loss by 64%. The operation of the soft switch, especially the locking and unlocking mechanism, is challenging because it is required to be operated with precise timing. Otherwise, the objective of using the soft switch would be affected profoundly. The locking mechanism should be capable of releasing the piston rapidly under heavy loading conditions or locked the piston with proper timing. This stated difficulty had been eliminated by redesigning the soft switch, whereby a high pressure switched volume signal was used to trigger the releasing mechanism of the piston of the soft switch (refer Figure 12) [45]. In that article [45], five different configurations of the hydraulic systems without and with soft switch were modeled and simulated. The simulation results were compared and concluded that 66.1% of throttling energy loss could be saved by using a soft switch. The authors [45] used two different types of soft switches: passive soft switch and locking soft switch (refer Figure 13(a)). Later, Beckstrand et al. [46] validated experimentally the same theory of soft switching and its performance by incorporating a sole locking soft-switch (refer to Figure 13(b)).
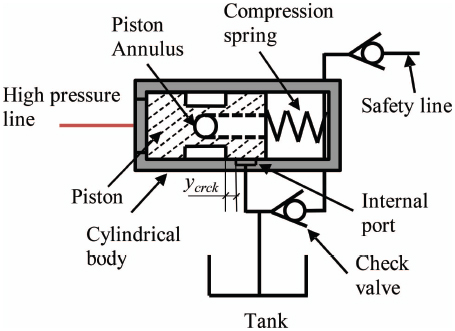
Figure 12 Schematic diagram of the locking soft switch.
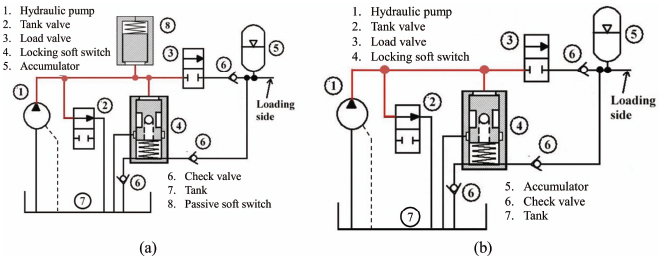
Figure 13 (a) Valve controlled hydraulic system with locking and passive soft switch (b) Valve controlled hydraulic system with locking soft switch only.
The influence of locking and passive soft switch individually, on a switched-mode hydraulic system had been studied in [47] using the bond graph technique. It concluded that, additionally, 3.25 % throttling energy could be saved when the passive soft switch is eliminated from the system, and only the locking mechanism is retained. Previously, many researchers used the bond graph modeling technique [98–100] in power hydraulics. Furthermore, the performance of the soft switch regarding the energy savings (throttling energy) was examined and validated by incorporating the locking soft switch in a typical hydrostatic drive system [48]. That experimental study [48] revealed that 56% of throttling energy could be saved using the soft switching concept.
3 Comparison Between Different Energy Savings Strategies
Different energy-saving strategies of the hydraulic drive systems are compared in Table 1. This study provides a fundamental understanding of the scope of energy savings potential in a fluid power system. It is observed that different energy savings strategies have different parameters such as energy recovering efficiency, fuel-saving potential, braking energy recovery potential, throttling energy savings, etc., to identify its potentiality. The energy saving by hybridization indicates that the potentiality of energy recovery efficiency and the fuel saving potential are about 69% and 20–40% on a hydraulic hybrid system and a parallel hydraulic hybrid system, respectively. Another strategy, i.e., control algorithms, shows that 40% of fuel-saving can be attained in case of the displacement controlled excavator system. Similarly, under the waste energy recovery strategy, the maximum braking energy recovery potential is about 78% in the Constant Pressure System (CPS) using flywheels. The last strategy, i.e., reduction of energy loss shows 56–66.1% throttling energy-saving potential, whenever a soft switch is used on a switch-mode hydraulic drive system. In Table I, the parameters of energy-saving potential which are not associated with the corresponding strategy are marked N.A. (not applicable).
4 Conclusions
This article reports a comprehensive review of the energy-saving potential of hydraulic drive systems using different strategies such as hybridization, control algorithms, waste energy recovery, and reduction of energy losses. Each strategy is sub-categorized into different forms according to the system configuration, control prospect, availabilities of hydraulic equipment, and different losses from the system. All strategies and its sub-categories are reviewed concisely. Thereafter, the energy-saving potential in various parameters such as energy recovering efficiency, fuel-saving potential, braking energy recovery potential, and throttling energy saving are reviewed and compared in tabulated form. The findings obtained from the present study are given below:
- Under the hybridization strategy, the hydraulic hybrid system possesses maximum energy recovery efficiency, i.e., 69%, which is higher than the energy recovery efficiency of the electric hybrid system, i.e., 53%. Also, the fuel-saving potential on series and parallel hybrid hydraulic system is about 20–40% and 10–25%, respectively. Moreover, when the drive system is hybridized with multiple engineering power transmission domains such as hydro-mechanical transmission, hydraulic-electric hybrid drive, etc. provides a better fuel economy than purely hydraulic hybrid or purely electric hybrid system. It is found that the hydraulic-electric hybrid vehicles consume 11.4% less electricity than purely electric vehicles.
- The fuel-saving capability on displacement controlled wheel loader, skid-steer-loader, excavator system is about 15%, 20%, and 40%, respectively, under the energy-saving strategy of control algorithms.
- Similarly, under the third category of energy-saving strategy, i.e., energy saving by waste energy recovery, the braking energy recovery potential in the Constant Pressure Rail (CPR) system, and Constant Pressure System (CPS) is about 63.4% and 78%, respectively.
- The maximum throttling energy-saving potential of an on/off valve controlled hydraulic system under the reduction of energy loss strategy is about 56–66.1% of the total energy loss of the system using a soft switching concept.
Table 1 A comparative study between different energy-saving strategies of a hydraulic drive system
| Strategies | Sub strategies | Parameters of energy-saving potential |
||||
| Energy recovering efficiency | Fuel saving potential | Braking energy recovery potential | Throttling energy saving | |||
| Energy saving by hybridization | Hydraulic Hybrid (HH) system | Parallel Hydraulic Hybrid (PHH) system | 69% | 10–25% | N.A. | N.A. |
| Series Hydraulic Hybrid (SHH) system | 20-40% | N.A. | N.A. | |||
| Electric Hybrid (EH) System | 53% | N.A. | N.A. | N.A. | ||
| Control algorithms | Valve controlled hydraulic system | N.A. | ||||
| Displacement controlled hydraulic system | N.A. | 40% | N.A. | N.A. | ||
| Electro-hydraulic actuators (EHA) system | N.A. | |||||
| Waste energy recover | Common pressure rail (CPR) HST system | N.A. | N.A. | 32–66%. | N.A. | |
| Constant Pressure System (CPS) using a flywheel | N.A. | N.A. | 78% | N.A. | ||
| Reduction of energy losses | Hydraulic system with soft switching concept | N.A. | N.A. | N.A. | 56–66.1% | |
This article describes different circuit layouts, mainly for mobile applications, for analyzing the aspects related to energy savings. This topic is probably vast for detailed analysis in a single paper. However, many exciting advanced technologies on the hydraulic drive system such as digital displacement technology, hydraulic transformer, central or distributed system, electro-hydraulic actuators system, instability situations in the load sensing system, individual meter-in and meter-out technology, etc., can be studied for energy savings research in future.
References
[1] Ho T. H., Ahn K. K. (2012) Design and control of a closed-loop hydraulic energy-regenerative system. Automation in Construction, 22, pp. 444–458.
[2] Divya K. C., Ostergaard J. (2009) Battery energy storage technology for power systems-An overview. Electric Power Systems Research, 79(4), pp. 511–520.
[3] Lukic S. M., Cao J., Bansal R. C., Rodriguez F., Emadi A. (2008) Energy storage systems for automotive applications. IEEE Transactions on industrial electronics, 55(6), pp. 2258–2267.
[4] Chen H., Cong T. N., Yang W., Tan C., Li Y., Ding Y. (2009) Progress in electrical energy storage system: A critical review. Progress in Natural Science, 19(3), pp. 291–312.
[5] Shao Q., Zhao Y., Du S., Du Y. (2015) A Novel Hybrid Energy Storage Strategy Based on Flywheel and Lead-acid Battery in Wind Power Generation System. International Journal of Control and Automation, 8(7), pp. 1–12.
[6] Cimuca G. O., Saudemont C., Robyns B., Radulescu M. M. (2006) Control and performance evaluation of a flywheel energy-storage system associated to a variable-speed wind generator. IEEE Transactions on Industrial Electronics, 53(4), pp. 1074–1085.
[7] Strasik M., Hull J. R., Mittleider J. A., Gonder J. F., Johnson P. E., McCrary K. E., McIver C. R. (2010) An overview of Boeing flywheel energy storage systems with high-temperature superconducting bearings. Superconductor Science and Technology, 23(3), p. 034021.
[8] Aljohani T. M. (2014) The Flywheel Energy Storage System: A Conceptual Study, Design, and Applications in Modern Power Systems. International Journal of Electrical Energy, 2(2), pp. 146–153.
[9] Xu B., Yang J., Yang H. (2005) Comparison of energy-saving on the speed control of the VVVF hydraulic elevator with and without the pressure accumulator. Mechatronics, 15(10), pp. 1159–1174.
[10] Kim Y. J. (2008) Integrated Modeling and Hardware-in-the-Loop Study for Systematic Evaluation of Hydraulic Hybrid Propulsion Options, A dissertation thesis for Doctor of Philosophy, The University of Michigan.
[11] Stienecker A. W., Stuart T., Ashtiani C. (2006) Anultracapacitor circuit for reducing sulfation in lead acid batteries for Mild Hybrid Electric Vehicles. Journal of Power Sources, 156(2), pp. 755–762.
[12] Aly A. A., Salem F. A., Hanafy T. O. S. (2014) Energy saving strategies of an efficient electro-hydraulic circuit (a review). International Journal of Control, Automation and Systems, 3(3).
[13] Rydberg K. E. (2015) Energy Efficient Hydraulics: System solutions for loss minimization. The National Conference on Fluid Power, Hydraulikdagar’15, Linkoping, Sweden, March 16–17, 2015.
[14] Ramakrishnan R., Hiremath S. S., Singaperumal M. (2012) Theoretical investigations on the effect of system parameters in series hydraulic hybrid system with hydrostatic regenerative braking. Journal of mechanical science and technology, 26(5), pp. 1321–1331.
[15] Rydberg K. E. (2009) Energy Efficient Hydraulic Hybrid Drives: Scandinavian International Conference on Fluid Power, SICFP-09, Linkoping, Sweden.
[16] Valente S., Ferreira H. (2008) Braking energy regeneration using hydraulic systems. Polytechnic Institute of Porto (IPP), Portugal, p. 8.
[17] Chen J. S. (2015) Energy efficiency comparison between hydraulic hybrid and hybrid electric vehicles. Energies, 8(6), pp. 4697–4723.
[18] Rodatz P., Paganelli G., Sciarretta A., Guzzella L. (2005) Optimal power management of an experimental fuel cell/supercapacitor-powered hybrid vehicle. Control engineering practice, 13(1), pp. 41– 53.
[19] Thounthong P., Rael S., Davat B. (2006) Control strategy of fuel cell/supercapacitors hybrid power sources for electric vehicle. Journal of Power Sources, 158(1), pp. 806–814.
[20] Li C. Y., Liu G. P. (2009) Optimal fuzzy power control and management of fuel cell/battery hybrid vehicles. Journal of power sources, 192(2), pp. 525–533.
[21] Huang Y. J., Yin C. L., Zhang J. W. (2009) Design of an energy management strategy for parallel hybrid electric vehicles using a logic threshold and instantaneous optimization method. International Journal of Automotive Technology, 10(4), pp. 513–521.
[22] Kim M. J., Peng H. (2007) Power management and design optimization of fuel cell/battery hybrid vehicles. Journal of power sources, 165(2), pp. 819–832.
[23] Bozic A. (2007) Introducing hydraulic-electric synergy into hybrid transmission using the free-piston engine technology. SAE paper 2007-01-4112.
[24] Ramakrishnan R., Hiremath S. S., Singaperumal M. (2014) Dynamic analysis and design optimization of series hydraulic hybrid system through power bond graph approach. International Journal of Vehicular Technology, Hindawi Publishing Corporation, 2014.
[25] Hui S., Junqing J. (2010) Research on the system configuration and energy control strategy for parallel hydraulic hybrid loader. Automation in Construction, 19(2), pp. 213–220.
[26] Tian D. W., Xie D. G., Cui S. M. (2009) Hybrid energy control strategy for hybrid electric drive system in military vehicle. Journal of Mechanical Engineering, 45(2), pp. 41–47.
[27] Farzanehfard H., Beyragh D. S., Adib E. (2008) A bidirectional soft switched ultracapacitor interface circuit for hybrid electric vehicles. Energy Conversion and Management, 49(12), pp. 3578–3584.
[28] Uzunoglu M., Onar O. C., Alam M. S. (2009) Modeling, control and simulation of a PV/FC/UC based hybrid power generation system for stand-alone applications. Renewable energy, 34(3), pp. 509–520.
[29] Hui S., Lifu Y., Junqing J., Yanling L. (2011) Control strategy of hydraulic/electric synergy system in heavy hybrid vehicles. Energy Conversion and Management, 52(1), pp. 668–674.
[30] Do H. T., Ahn K. K. (2012) A study of energy saving hydraulic system by a pressure coupling hydrostatic transmission. Journal of Drive and Control, 9(1), pp. 10–17.
[31] Grabbel J., Ivantysynova M. (2005) An investigation of swash plate control concepts for displacement controlled actuators. International Journal of Fluid Power, 6(2),pp. 19–36.
[32] Park S. H., Lee J. M., Kim J. S. (2009) Robust control of the pressure in a control-cylinder with direct drive valve for the variable displacement axial piston pump. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 223(4), pp. 455–465.
[33] Singh R., Kunt C. (1990) A linear time varying model for on-off valve controlled pneumatic actuators. Transactions of the ASME, 30, pp. 22– 48.
[34] Shang T. (2004) Improving performance of an energy efficient hydraulic circuit, Doctoral dissertation, College of Graduate Studies and Research,University of Saskatchewan, Saskatoon, Saskatchewan.
[35] Kaya D., Yagmur E. A., Yigit K. S., Kilic F. C., Eren A. S., Celik C. (2008) Energy efficiency in pumps. Energy Conversion and Management, 49(6), pp. 1662-1673.
[36] Ho T. H., Ahn K. K. (2010) Modeling and simulation of hydrostatic transmission system with energy regeneration using hydraulic accumulator. Journal of Mechanical Science and Technology, 24(5), pp. 1163–1175.
[37] Yang H., Sun W., Xu B. (2007) New investigation in energy regeneration of hydraulic elevators. IEEE/ASME transactions on mechatronics, 12(5), pp. 519–526.
[38] Mingdong C., Dingxuan Z. (2011) Research on boom energy recovery system with closed circuit in Hydraulic Excavators. International Conference Transportation, Mechanical, and Electrical Engineering, TMEE-2011, pp. 954–957.
[39] Ahn K. K., Ho T. H., Dinh Q. T. (2008) A study on energy saving potential of hydraulic control system using switching type closed loop constant pressure system. Proceedings of the Japan Fluid Power System Society (JFPS) International Symposium on Fluid Power, pp. 317–322.
[40] Triet H. H., Ahn K. K. (2011) Comparison and assessment of a hydraulic energy-saving system for hydrostatic drives. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 225(1), pp. 21–34.
[41] Do H. T., Ahn K. K. (2011) A study on a closed-loop hydraulic braking energy regeneration system driven by a sliding mode controller. International Conference on Control, Automation and Systems (ICCAS-2011), IEEE, pp. 1594–1599.
[42] Rannow M. B. (2016) Achieving Efficient Control of Hydraulic Systems Using On/Off Valves, Doctoral dissertation, University of Minnesota.
[43] Tu H. C., Rannow M., Van de Ven J., Wang M., Li P. Y., Chase, T. (2007) High speed rotary pulse width modulated on/off valve. International Mechanical Engineering Congress, Proceedings of the ASME, Seattle, WA, pp. 42559.
[44] Rannow M. B., Li P. Y. (2012) Soft switching approach to reducing transition losses in an on/off hydraulic valve. Journal of dynamic systems, measurement, and control, 134(6), p. 064501.
[45] Van de Ven J. D. (2014) Soft switch lock-release mechanism for a switch-mode hydraulic pump circuit. Journal of Dynamic Systems, Measurement, and Control, 136(3), p. 031003.
[46] Beckstrand B. K., Van De Ven J. D. (2014) Experimental validation of a soft switch for a virtually variable displacement pump. American Society of Mechanical Engineers/BATH 2014, Symposium on Fluid Power and Motion Control, pp. V001T01A038–V001T01A038.
[47] Mahato A. C., Ghoshal S. K., Samantaray A. K. (2017) Influence of locking and passive soft switching on hydraulic circuit efficiency. Simulation, 93(3), pp. 237–249.
[48] Mahato A. C., Ghoshal S. K., Samantaray A. K. (2017) Energy saving of a hydrostatic drive system by incorporating soft switch. Journal of the Brazilian Society of Mechanical Sciences and Engineering, 39(6), pp. 1929–1945.
[49] Hamzehlouia S., Izadian A., Anwar, S. (2013) Modeling and control of a hybrid hydraulic-electric propulsion system. Advances in Automobile Engineering, 2(1). http://dx.doi.org/10.4172/2167-7670.100 0102
[50] Shen C., Shan P., Gao T. (2011) A comprehensive overview of hybrid electric vehicles. International Journal of Vehicular Technology, 2011, Article ID: 571683. https://doi.org/10.1155/2011/571683
[51] Shakouri P., Ordys A., Darnell P., Kavanagh P. (2013) Fuel efficiency by coasting in the vehicle. International Journal of Vehicular Technology, 2013, Article ID: 391650. https://doi.org/10.1155/2013/391650
[52] Chan C. C. (2007) The state of the art of electric, hybrid, and fuel cell vehicles. Proceedings of the IEEE, 95(4), pp. 704–718.
[53] Burke A. F. (2007) Batteries and ultracapacitors for electric, hybrid, and fuel cell vehicles. Proceedings of the IEEE, 95(4), pp. 806–820.
[54] Chan C. C., Bouscayrol A., Chen K. (2010) Electric, hybrid, and fuel-cell vehicles: Architectures and modeling. IEEE Transactions on Vehicular Technology, 59(2), pp. 589–598.
[55] Dinçmen E., Güvenç B. A. (2012) A control strategy for parallel hybrid electric vehicles based on extremum seeking. Vehicle system dynamics, 50(2), pp. 199–227.
[56] Wu B., Lin C. C., Filipi Z., Peng H., Assanis D. (2004) Optimal power management for a hydraulic hybrid delivery truck. Vehicle System Dynamics, 42(1–2), pp. 23–40.
[57] Kim Y. J., Filipi Z. (2007) Simulation study of a series hydraulic hybrid propulsion system for a light truck. SAE Technical Paper. No. 2007-01-4151.
[58] Cheong K.L., Li P.Y., Chase T.R. (2011) Optimal design of power-split transmissions for hydraulic hybrid passenger vehicles. Proceedings of the American Control Conference, pp. 3295–3300.
[59] Rossetti A., Macor A.,Scamperle M. (2017) Optimization of components and layouts of hydromechanical transmissions. International Journal of Fluid Power, 18(2), pp. 123–134.
[60] Kress J.H. (1968) Hydrostatic power-splitting transmissions for wheeled vehicles – classification and theory of operation. SAE Technical Paper 680549, 1968. https://doi.org/10.4271/680549
[61] Sim T.P., Li P.Y. (2009) Analysis and control design of a hydro-mechanical hydraulic hybrid passenger vehicle. ASME 2009 Dynamic Systems and Control Conference, Paper No: DSCC2009-2616, pp. 667–674.
[62] Sedler S.J. (2012) Design of a hydromechanical transmission with regeneration for a passenger vehicle. A thesis submitted to the University of Minnesota. http://hdl.handle.net/11299/140148
[63] Du Z., Cheong K.L., Li P.Y., Chase T.R. (2013) Fuel economy comparisons of series, parallel and HMT hydraulic hybrid architectures. Proceedings of the American Control Conference, pp. 5954–5959.
[64] Kepner R. P. (2002) Hydraulic power assist - a demonstration of hydraulic hybrid vehicle regenerative braking in a road vehicle application. SAE technical paper, No. 2002-01-3128.
[65] Paul M., Jacek S. (2003) Development and simulation of a hydraulic hybrid powertrain for use in commercial heavy vehicles. SAE technical paper. No. 2003-01-3370DHSHD.
[66] Heybroek K. (2008) Saving energy in construction machinery using displacement control hydraulics: Concept realization and validation. Doctoral dissertation, Linköping University Electronic Press.
[67] Padovani D., Rundo M., Altare G. (2020) The Working Hydraulics of Valve-Controlled Mobile Machines: Classification and Review. Journal of Dynamic Systems, Measurement, and Control, 142(7). https: //doi.org/10.1115/1.4046334
[68] Busquets, E. and Ivantysynova, M. (2013). Temperature Prediction of Displacement controlled multi-actuator machines. International Journal of Fluid Power, 14(1), pp. 25–36.
[69] Sarkar B. K., Das J., Saha R., Mookherjee S., Sanyal D. (2013) Approaching servoclass tracking performance by a proportional valve-controlled system. IEEE/ASME Transactions on Mechatronics, 18(4), pp. 1425–1430.
[70] Ahn K. K., Nam D. N. C., Jin M. (2014) Adaptive back stepping control of an electro hydraulic actuator. IEEE/ASME transactions on mechatronics, 19(3), pp. 987–995.
[71] Backe W. (1991) Electro hydraulic load sensing. Proceedings of the International Off-Highway and Power plant Congress and Expostion, Sep 9–12, Milwaukee, USA.
[72] Liang X., Virvalo T. (2001) What’s wrong with energy utilization in hydraulic cranes. Proceedings of the 5th International Conference on Fluid Power Transmission and Control, April 3-5, Hangzhou, China, pp. 419–424.
[73] Backe W. (1993) Recent Research Projects in Hydraulics. Proceedings of the Second JHPS International Symposium on Fluid Power, September 6–9, Tokyo, Japan, pp. 3–27.
[74] Luomaranta M. (1999) A Stable electro-hydraulic load sensing system based on a microcontroller. Proceedings of the Sixth Scandinavian International Conference on Fluid Power, May 26–28, Tampere, Finland, pp. 419–432.
[75] Mansouri G., Misovec K., Johnson B., Babbitt G., Sturman O. (2001) Variable flow supply using switched-mode control of a fixed-displacement pump. Proceedings of the Seventh Scandinavian International Conference on Fluid Power, 110, pp. 361–376.
[76] Liang X., Virvalo T., Linjama M. (1999) The Influence of Control valves on the efficiency of a Hydraulic Crane. Proceedings of the 6th Scandinavian International Conference on Fluid Power, May 26–28, Tampere, Finland, pp. 381–394.
[77] Bedotti A., Campanini F., Pastori M., Riccò L.,Casoli P., (2017) Energy saving solutions for a hydraulic excavator. Energy Procedia, 126, pp. 1099–1106.
[78] Borghi M., Zardin B., Pintore F.,Belluzzi F., (2014) Energy savings in the hydraulic circuit of agricultural tractors. Energy Procedia, 45, pp. 352–361.
[79] Rahmfeld R., Ivantysynova M., Weber J. (2004) Displacement controlled wheel loader—a simple and clever solution. International Fluid Power Conference Proceedings, Dresden, Germany, 2, pp. 183–196.
[80] Williamson C., Ivantysynova M. (2007) The effect of pump efficiency on displacement-controlled actuator systems. International Conference on Fluid Power, Tampere, Finland, 2, pp. 301–326.
[81] Zimmerman J. (2008) Design and simulation of an energy saving displacement-controlled actuation system for a hydraulic excavator. Master’s thesis, Purdue University, West Lafayette, IN.
[82] Quan Z., Quan L., Zhang J. (2014) Review of energy efficient direct pump controlled cylinder electro-hydraulic technology. Renewable and Sustainable Energy Reviews, 35, pp. 336–346.
[83] Vanderlaan D., Ralf G. O. M. M., Shenouda A. (2014) Method of controlling an electro-hydraulic actuator system having multiple actuators. Parker Hannifin Corporation, U.S. Patent 8, 793, 023.
[84] Chiang M.H., Chen C.C., Kuo C.F.J. (2009) The high response and high efficiency velocity control of a hydraulic injection molding machine using a variable rotational speed electro-hydraulic pump-controlled system. International Journal of Advance Manufacturing Technology, 43:841–851. http://dx.doi.org/10.1007/s00170-008-1759 -z
[85] Chiang M.H. (2011) A novel pitch control system for a wind turbine driven by a variable-speed pump-controlled hydraulic servo system. Mechatronics, 21: 753-761. http://dx.doi.org/10.1016/j.mechatronics. 2011.01.003
[86] Yoon J. I., Kwan A. K., Truong D. Q. (2009) A study on an energy saving electro-hydraulic excavator. ICCAS-SICE-2009, IEEE, pp. 3825–3830.
[87] Lv C., Zhang J., Li Y., Yuan Y. (2015) Mechanism analysis and evaluation methodology of regenerative braking contribution to energy efficiency improvement of electrified vehicles. Energy Conversion and Management, 92, pp. 469–482.
[88] Habibi S.R. (2000) Comparison of hydrostatic and servovalve controlled hydraulic actutation systems in robotics. SAE Technical Paper, 2000-01-2593. Milwaukee, Wisconsin: SAE.
[89] Alle N., Hiremath S.S., Makaram S., Subramaniam K., Talukdar A. (2016) Review on electro hydrostatic actuator for flight control. International Journal of Fluid Power, 17(2), pp. 125–145.
[90] Rongjie K., Zongxia J., Shaoping W., Lisha C. (2009) Design and simulation of electro-hydrostatic actuator with a built-in power regulator. Chinese Journal of Aeronautics, 22(6), pp. 700–706.
[91] Dasgupta K. (2000) Analysis of a hydrostatic transmission system using low speed high torque motor. Mechanism and machine theory, 35(10), pp. 1481–1499.
[92] Jen Y. M., Lee C. B. (1993) Influence of an accumulator on the performance of a hydrostatic drive with control of the secondary unit. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 207(3), pp. 173–184.
[93] Pourmovahed A., Beachley N. H., Fronczak F. J. (1992) Modeling of a hydraulic energy regeneration system: Part I - Analytical treatment. Journal of dynamic systems, measurement, and control, 114(1), pp. 155–159.
[94] Pourmovahed A., Beachley N. H., Fronczak F. J. (1992) Modeling of a Hydraulic Energy Regeneration System: Part II - Experimental Program. Journal of dynamic systems, measurement, and control, 114(1), pp. 160–165.
[95] Shimoyama H., Ikeo S., Koyabu E., Ichiryu K., Lee S. K. (2004) Study on hybrid vehicle using constant pressure hydraulic system with flywheel for energy storage, SAE Technical Paper, No. 2004-01-3064.
[96] Cao J., Gu L., Wang F., Qiu M. (2005) Switch mode hydraulic power supply theory. International Mechanical Engineering Congress and Exposition, ASME, pp. 85–91.
[97] Tu H.C., Rannow M. B., Wang M., Li P. Y., Chase T. R., Van de Ven J. D. (2012) Design, modeling, and validation of a high-speed rotary pulse-width-modulation on/off hydraulic valve. Journal of dynamic systems, measurement, and control, 134(6), p. 061002.
[98] Borutzky W. (2011) Bond graph modelling of engineering systems. New York: Springer.
[99] Borutzky W. (2009) Bond graph methodology: development and analysis of multidisciplinary dynamic system models. Springer Science & Business Media.
[100] Mukherjee A., Karmakar R., Samantaray A.K. (2006) Bond graph in modeling, simulation and fault identification. I.K. International Pvt Ltd, New Delhi.
Biographies

Anil C. Mahato is an Assistant Professor in the mechanical engineering department of Birla Institute of Technology, Mesra, Ranchi. He completed B.Tech in 2009 from the Haldia Institute of Technology under the University of WBUT, Kolkata. After that, he did masters (M.Tech) in CAD/CAM specialization from the NIT Jamshedpur in 2011 and then served one automotive industry as a design engineer until the year 2014. Thereafter, he received Ph.D degree from IIT (ISM) Dhanbad in 2018. He has authored many journal articles. His current research interests are system modeling, simulation and control, condition monitoring, and fluid power.

Sanjoy K. Ghoshal is an associate professor and in-charge of dynamics of machinery lab in the mechanical engineering department in IIT (ISM), Dhanbad. He completed his undergraduate program in 1996 from Jadavpur University (JU), Kolkata, and then worked in different industries as a maintenance engineer until the year 2001. Thereafter, he did his masters in machine design specialization from the same University (JU) in 2003 and then completed doctoral work in 2007 from IIT-Kharagpur. He has authored many journal articles and one book chapter. His current research interests are system modeling, simulation and control, fault diagnosis, automation, condition monitoring, and fluid power.
International Journal of Fluid Power, Vol. 21_1, 81–118.
doi: 10.13052/ijfp1439-9776.2114
© 2020 River Publishers