Analysis and Application of Chaotic Genetic Algorithm Based on Network Security in The Research of Resilience of Cluster Networks
Xiaobo Song
Equipment Management and UVA Engineering College, Air Force Engineering University; Xi’an Shanxi, 710051, China
E-mail: qweasd12320231213@163.com
Received 24 January 2024; Accepted 27 February 2024
Abstract
With the wide application of UAV, in the actual flight process, UAV needs to calculate the safe path according to its own position, environment, obstacles and other information. Due to the complex and changeable scene and environment of UAV mission execution, it is very important to select an appropriate UAV path planning algorithm. This paper aims at the path planning problem of multiple UAVs in a complex three-dimensional environment to ensure that multiple UAVs reach the mission location from different angles. Taking the chaotic genetic algorithm in network security protection as the main body, the operation difficulty of the algorithm is reduced, and the solution speed and accuracy of the algorithm are improved. The path length obtained by the proposed algorithm is 8.4% less than that of the ABC algorithm, 11.3% less than that of the PSO algorithm, and 4.2% less than that of the BABC algorithm. The system running time of the improved algorithm is also reduced by 27% to 45% compared with other algorithms. In terms of unmanned cooperation, this paper proposes a system capability based on network modeling to improve the cooperative combat capability of multiple UAVs. By establishing a network model, information sharing, collaborative decision-making and collaborative decision-making between drones are realized, thereby improving the effectiveness of the entire system. At the same time, this paper also considers the problem of network survivability. By introducing redundant design and fault recovery mechanism, the robustness and reliability of the system are enhanced.
Keywords: Unmanned collaboration, network modeling, system capability, network survivability.
1 Introduction
UAV is an autonomous flight system without airborne pilot operation and can operate remotely or autonomously, allowing ground operators to pre-program, monitor and control it. The Wright brothers flew the first [1, 2] in 1903, followed by the rapid growth of the aviation industry. Soon the first drone was born during World War I, which was built in 1918 by the Americans, Lawrence and Aspersion. The researchers later updated the materials, engines, communications facilities, and weapons and equipment. In 1939, during World War II, Germany made the Vergeltungswaffe-1. It was the first mass-produced drone, and the most important unmanned drone of World War II, built to bomb the city of London. Its technical base was the 1941 pulse jet engine, but there were serious stability problems during test flights. Drones played a bigger role during the Cold War, mainly used for reconnaissance, surveillance and lure radar [3, 4]. The RP-71 drone, built in the United States in 1955, is controlled by a joystick and can take aerial photography. During the 1960 to 1970 Vietnam War, the need to respond with missile attacks, so drone decoys were often used to deceive radar, such as the McConnellADM-20 Quail. After the end of the Vietnam War in 1975, Engineers have developed many new drone models, the [5, 6].
In the 1970s, Israel became a major producer of drones. The scout drones were the most successful drones during that time, mainly used to collect enemy ground information, drone air force information, the location of radar and its parameters [7, 8]. They monitored the movements of the enemy forces during the Israeli air strikes. The Israeli air force monitors the Syrian air base with drones, providing real-time data on the take-off of the MiG fighter jets. As a result, Israeli fighters can attack Syrian aircraft immediately after the enemy takes off. After the initial success of the reconnaissance drone, engineers began to develop more advanced attack drones, including the better-known Pioneer [9, 10]. At the time, the U. S. Marine Corps desperately needed such small, flexible, and inexpensive drones. The Pioneer drone can either fly on a per-planned path or fly it by an operator. It can guarantee 185 kilometres of data transmission, stay in the air for five hours, and can carry a payload of 35 kilograms.
That same year, US Air Force Predator drones joined the war. With the satellite data link system installed, this allows it to perform missions under any meteorological conditions. During their service, the Raiders completed many air-raid missions. Later, because the military needed cheap and hand-launched drones, the Aerosol Environment Pointer [11, 12], which was battery-powered and equipped with night cameras. With a wingspan of 2.74 m, a length of 1.84 meters and weighing 3.6 kg, it can be prepared by two people in five minutes. It can also form a cluster, consisting of four aircraft and a ground control station weighing 22 kg, which can operate for an hour at an altitude of 50 m–150 m and 8 km distance. It turns out that the drone can be used in multiple ways in each theatre, and it is very effective. After nearly 70 years of development, a complete aviation industry system has now been established. Self-developed military drones and commercial drones are also going overseas. Among them, the Wing Logon UAV developed by AVIC Chengdu Aircraft Design and Research Institute is a multi-purpose UAV with long-range navigation capability and fully autonomous take-off, landing and flight capability of [13, 14].
2 Payload Path Planning and Modeling
2.1 Mobility Performance Constraint Model of UAV
3D space modeling is the first step in 3D path planning. When 2D path planning extends to 3D path planning, you can use the 3D mesh method [15, 16] to divide the 3D space into several horizontal planes perpendicular to the Z axis, and then divide each horizontal plane into a grid. To facilitate follow-up work and improve the efficiency of path planning, the UAV workspace needs to be processed before modeling using a 3D mesh approach. First, according to Equations (1) and (2), we can see the ability of the UAV to solve obstacles below the height of the UAV and fill the gap less than the width of the UAV.
| (1) | |
| (2) |
Secondly, according to Equations (3), (4) and (5), we can extend the obstacles and gaps that the UAV cannot cross according to the safe movement radius of the UAV.
| (3) | |
| (4) | |
| (5) |
According to Equation (6), we can deal with the above two steps before modeling the 3D grid environment. Then, the environment was modeled using a 3D mesh approach to establish a 3-D rectangular coordinate system, O-XYLEM.
| (6) |
Owing to constraints related to fuel capacity and mission distance, it is imperative to establish a restricted maximum range for the drone. Based on Equation (7), it can be deduced that the maximum range constraint for a single operation is as follows:
| (7) |
Due to its own mobility constraints and inertia, drones will have the minimum turning radius limit when steering. According to the Equation (8), we can know the minimum turning radius of the UAV:
| (8) |
2.2 UAV Path Planning Cost Evaluation Model
According to Equation (9), we can know that when the height of the UAV is too low, it is easy to cause harm to the UAV itself, which is unfavourable to the flight. When the altitude is too high, it is easy to be detected by radar and attacked. Therefore, the flight altitude should be kept within a certain range.
| (9) |
Due to the limitation of the UAV itself, 360 steering cannot be made during flight. According to Equation (10), we can know that there is a maximum yaw Angle.
| (10) |
The detection probability for each cell represents the system’s overall detection probability. Consequently, the comprehensive average radar detection probability is formulated as Equation (11):
| (11) |
Drones are extremely prone to crash in complex environments, so the collision threat must be considered [17]. According to Equation (12), when the UAV is high enough, the threat of collision is not considered.
| (12) |
Figure 1 Comprehensive assessment diagram of UAV navigation trace.
Figure 1 provides a detailed schematic diagram of the comprehensive evaluation of drone navigation trajectories. The drone’s trajectory encompasses its position, speed, attitude, direction, and other critical state information, all of which interact dynamically with the environment. These intricate factors significantly impact flight performance, necessitating a comprehensive evaluation of drone navigation trajectories. In this assessment, key considerations include trajectory quality, safety, efficiency, and reliability. Quality refers to whether a drone can accurately fly along a predetermined route. Safety involves whether drones can avoid collisions and other hazards during flight. Efficiency refers to whether drones can maximize energy savings while completing tasks. And reliability refers to whether the drone can operate stably under various environmental conditions [18]. By meticulously analyzing and evaluating drone factors, we can gain deeper insights into their performance, paving the way for refined control, planning, and optimization. For instance, if drone efficiency is found wanting, optimizing flight paths or redesigning can enhance it. Similarly, if drone safety measures fall short, enhancing collision avoidance systems or stability can improve it. Figure 1 offers a comprehensive framework for understanding and evaluating drone navigation trajectories, aiding in better control and optimization. This framework is crucial for drone’s widespread applications in fields like cargo transportation, environmental monitoring, search and rescue.
3 Two-dimensional Path Based on Genetic Algorithm with Network Security
3.1 Search Strategy Improvement
The UAV is an autonomous flight system that does not require airborne pilot operation, but can operate remotely or autonomously, allowing ground operators to ore-program, monitor and control it. As a key technology of UAV mission planning, path planning has a very important impact on the effectiveness of UAV combat effectiveness [19, 20]. First, Stanislavsky chaotic sequence is added to the swarm algorithm to improve the initialization distribution and search strategy and optimize the resulting path results [21, 22]. Then, the UAV integrated trace cost function value is taken as the path evaluation factor to compare the path. Finally, in a typical threat scenario, the effectiveness of the algorithm is verified by simulation and the reliability of chaotic genetic algorithm improving network security through multiple comparison simulations [23, 24].
The ABC algorithm exhibits certain limitations, primarily stemming from the inherent necessity of exploration and exploitation within population-based optimization methodologies. In operational contexts, the dual objectives of exploration and exploitation often present conflicting requirements, rendering the ABC algorithm susceptible to local optima. To address these challenges, enhancements are introduced to the ABC algorithm’s search strategy, leveraging the benefits inherent in chaotic sequences. During the “wasp” phase, the algorithm integrates chaotic sequences proximate to the prevailing optimal solution, thereby transitioning from a deterministic to a chaotic sequence paradigm. Consequently, the swarm algorithm harnesses chaotic variables’ properties, facilitating offspring individuals’ traversal across solution spaces. This strategic modification minimizes the inherent randomness and myopia of search processes, enhancing both efficiency and efficacy in identifying optimal solutions, as referenced in [25, 26]. The inception of the artificial swarm algorithm can be attributed to Kara Boga in 2005, subsequently garnering considerable scholarly attention. Within these swarm configurations, distinct bee types—namely, recruiting, tracking, and scouting bees—collaboratively endeavour to discern global optima characterized by minimal fitness metrics. These divisions within the colony fulfil distinct roles across various optimization contexts. Specifically, recruitment bees identify proximal nectar sources, subsequently relaying this information through intricate dance patterns within the hive. In turn, tracking bees select among recruitment bees to shadow, exploring adjacent spatial regions around the identified nectar source. Conversely, scouting bees undertake expansive, albeit randomized, exploratory endeavours throughout the solution space, as delineated in [27]. Should a nectar source remain unchanged over stipulated durations, pertinent recruitment bees transition into scouting roles, broadening their search horizons. This decentralized approach obviates inter-colony dependencies, enabling colonies to randomly explore uncharted territories, subsequently relaying newfound nectar source intelligence.
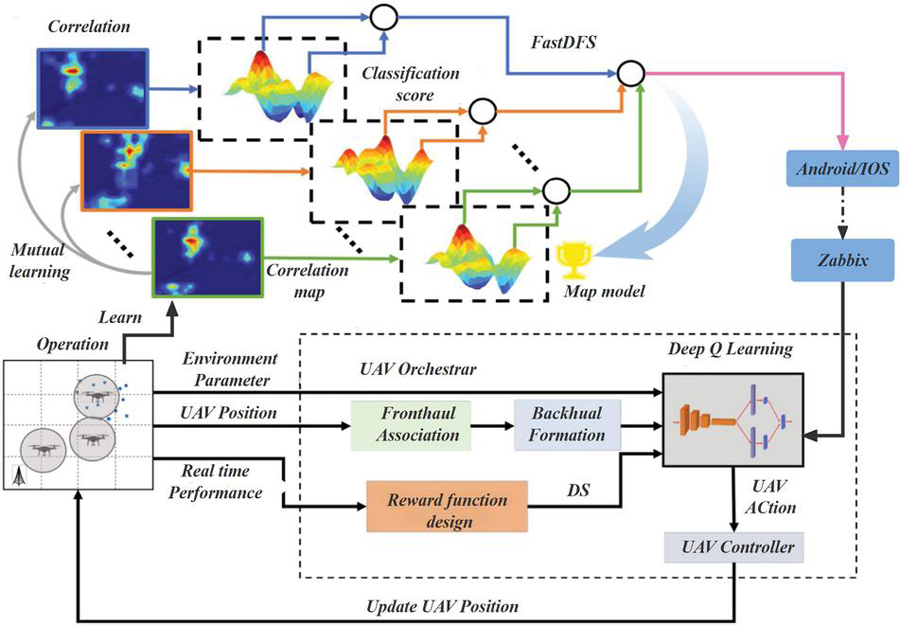
Figure 2 Chaos search diagram.
Figure 2 illustrates the complex dynamics of the chaotic search process. Firstly, based on the size of the indoor positioning space, the number and position of feature light sources are calculated to complete the layout of feature light sources. The ground area is divided into multiple previous areas based on the layout of feature light sources, and the center of gravity of the area shape is used to replace that area. Different regions correspond to the collection of different quantities of feature light source information [28]. For every three samples collected, the centroid coordinates of the current position can be calculated based on non-interference feature light source data. The optimal combination of feature light sources in the current region can be determined through error calculation. This optimal combination represents the minimum error of the image processing results obtained by Open CV for contour extraction and center position coordinate determination. Through this method, each part of the prior region can be calculated to obtain the optimal combination of feature source sets. The encoding information of all feature light sources that can be collected in the prior region and the corresponding optimal combination of feature light sources in that region can be input into the computer accordingly [29].
When the object to be measured enters the indoor space, all the collected and available characteristic light source signals are identified through image processing, all the collected signals are matched with the characteristic light source coding information in the prior region, and the prior region with the largest number of matches is selected. If the coding information of the characteristic light source corresponding to the prior region can completely cover the characteristic light source information collected by the object to be measured, the optimal combination point is directly selected for the calculation of the position coordinates to be measured. If the optimal combination can be collected by the prior area and cannot be measured, using the prior region and the object and the characteristics of the centre of the light source information to determine the second optimal characteristic light source combination, and using the combination of the object position coordinates, using this method is much smaller than any choose the three characteristic light source combination error, mainly because the optimal characteristic light source combination is the calculated halo phenomenon error in image processing is small. If the characteristic light source information collected by the measured object and the characteristic light source information collected by the prior area are less, it means that the prior position division of the area is not reasonable, the characteristic light source information of the measured object is arranged and combined.
3.2 Benchmark Function Test
These results show that the solution results of the improved algorithms in this chapter are all better than the ABC algorithm, and they also provide high accuracy on the test functions with four different peaks [30]. When at D 50, the improved algorithm in this chapter can directly obtain the optimal solution on Astringent and Grievance. When the dimension is high D 100, and the difficulty of optimization increases, the improvement algorithm in this chapter can still maintain a better solving effect. For the indoor space with 3m height, select the lighting device with 0.1m height, the error accuracy of the standard circle is about 0.002 m, and the corresponding resolution is 500500, the error can be identified. At this time, according to the maximum d calculated corresponding to the triangle similarity principle is 0.058 m, and the maximum error generated by the two characteristic light sources 2 d is 0.116 m, and the relative error in the indoor space with 3 m height is 3.87%. The recognition relative error calculation is mainly based on the following two constraints: the accuracy of image processing is the corresponding resolution; the ratio of lighting device height to indoor space height and the two determined two. In addition, increase the height of the signal acquisition device, and then change the ratio of the height of the acquisition device and the indoor space, in the same resolution, the corresponding relative error is smaller. Considering the drone indoor positioning scenario, when the drone is at a certain height can still collect three or more characteristic light source, characteristic light source layout distance should be set reasonable, assuming the distance is 0.1 m, k corresponds to 0 m 0.00345 m, the corresponding height absolute error is 0.055 m, the height of 3 m high indoor space is 1.83%, respectively. According to the height error calculation formula can be introduced when the characteristic light source layout distance increases, the corresponding error will be smaller. Both ABC algorithm and PSO algorithm can find a path between the starting point and the end point, but the paths produced by these two algorithms pass through the space with the influence range of obstacles, so they do not belong to the optimal path to completely avoid obstacles. Especially near the start point, the path generated by the ABC algorithm and PSO algorithm are already very close to the central position of the obstacle. Therefore, it can be seen that the solution quality obtained by both algorithms is poor.
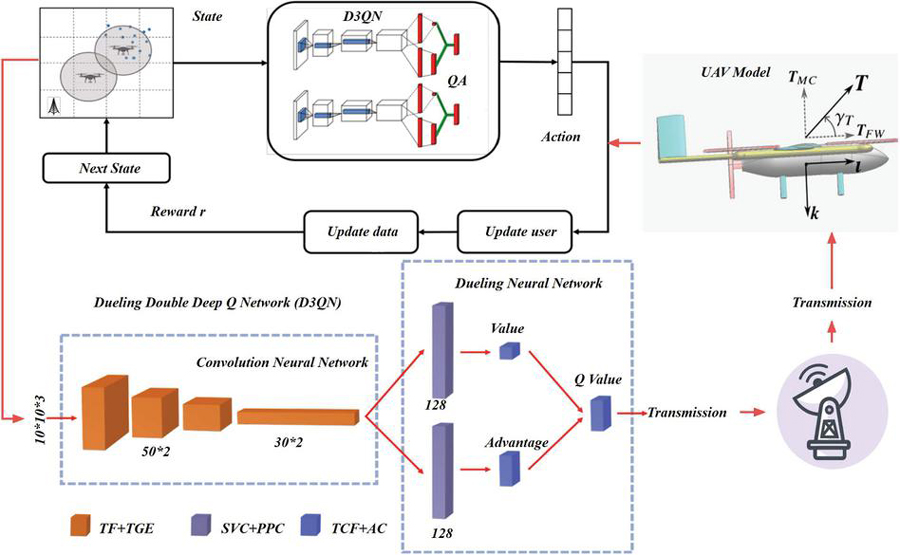
Figure 3 Rotation signal diagram of aircraft.
Figure 3 shows the rotation signal diagram of the aircraft before exploring the stability and reliability of the aircraft’s rotating airflow. Entropy is the bridge that connects the micro world and the macro world. The system achieves entropy increase through motion. Motion is a component of mass and energy. In classical physical systems, mass and energy are independent, and mass is reflected by weight. Energy in mechanics is limited to kinetic energy and potential energy, and a mass object can carry different energies. Therefore, the understanding of mass and energy is narrow and limited, and can only satisfy the motion of low-speed objects, Unable to explain the mass loss in nuclear reactions and the role of high-energy objects in particle energy calculation scenarios. The mass and energy equations proposed by Einstein in special relativity unify mass and energy, believing that mass and energy are different manifestations of the same substance. In general relativity, it states that matter guides the curvature of space and time, guides the motion of matter, and unifies space and time. Time is the external manifestation of energy gradient, and spacetime curvature is the distribution of energy in the field. Due to the inability of this theory to explain the source of massive objects that deform space at the initial moment, it is recommended to assume that energy exists before mass.
Based on the generalized quantum theory, the particle in the induction environment field of self-organized motion can realize dynamic image, it shows that energy can gather the corresponding induction particles, and the greater the energy, the more gathered particles, enough microscopic induction particles coupled to form structure is relatively stable macro-objects, produced the concept of mass, so the energy before mass, through the energy field induction aggregation mass. For an isolated system, the energy is evenly distributed and will be in equilibrium, and the motion is absent. Thus, the existence of motion is due to the existence of the energy gradient difference in the system, and the microscopic fluid particles flow exponentially according to Ulyanovsk exponentially, which is the motion of matter driven by the energy gradient. In the calculation of the object trajectory prediction of macroscopic low speed motion, the essence is to get the optimal solution by finding the minimum gradient. The gradient difference not only drives the motion of the matter, but also guides people to find the optimal solution.
4 Path Plan for Multiple UAVs Based on Particle Hybrid Algorithms
Unmanned Aerial Vehicles (UAVs) have found extensive applications across both military and civilian sectors, often navigating intricate and perilous flight terrains. Path planning for UAVs constitutes a critical technological domain that significantly influences UAV performance. Consequently, devising judicious flight paths within three-dimensional threat matrices is imperative. Distinct from its two-dimensional counterpart, three-dimensional spatial path planning not only offers enhanced practical applicability but also introduces augmented complexities in terms of both threat and kinematic constraints. These heightened intricacies precipitate exponential escalations in computational challenges. To ensure the formulation of collision-averse trajectories within multifaceted three-dimensional environments, it becomes indispensable to address overarching optimization issues, encompassing extended computational durations and premature convergence tendencies.
Chaotic systems have garnered applications across diverse domains, encompassing realms such as communications, economics, and algorithmic optimization. The configuration of particle initialization distribution constitutes a pivotal determinant in discerning optimal solutions. Specifically, a more homogeneous initial distribution augments population diversity, subsequently elevating the likelihood of achieving optimal solutions and expediting convergence rates. Notably, certain scholars have advocated for the adoption of chaotic sequences in initializing the particle swarm optimization (PSO) algorithm, attributing chaos-based initialization strategies with superior performance outcomes relative to stochastic counterparts. To augment the diversity inherent in particle initialization procedures, the Logistic chaos model was prioritized due to its computational efficiency and operational simplicity, particularly when juxtaposed with the Stanislavsky chaos model delineated in Chapter 3. Further refinement was achieved by integrating features of the genetic algorithm, wherein the enhanced particle swarm algorithm iteratively optimizes identified superior chromosomes. This hybrid approach incorporates adaptive dynamic crossover probabilities alongside a consistent mutation rate, thereby mitigating algorithmic complexities while concurrently enhancing solution precision and efficiency. Post derivation of individual UAV trajectories, the trajectory evaluation metrics for each UAV serve as pivotal evaluation criteria. Empirical validation conducted within representative combat scenarios substantiates the algorithm’s efficacy. Simulation outcomes corroborate that the multi-UAV model leveraging the refined genetic particle mixing algorithm manifests commendable path planning proficiency.
Building upon the foundational framework of the genetic algorithm, the presented methodology integrates an enhanced particle swarm algorithm to iteratively refine the selected optimal chromosome. This approach incorporates meticulously designed adaptive dynamic crossover probabilities and a steadfast mutation rate, thereby alleviating algorithmic complexities while enhancing both computational efficiency and solution accuracy. Upon determining the trajectory for each Unmanned Aerial Vehicle (UAV), individual UAV trajectory evaluation indices serve as pivotal criteria for path assessment. Empirical assessments conducted within representative combat scenarios corroborate the algorithm’s efficacy and applicability. Simulation outcomes substantiate that the multi-UAV model, leveraging the refined genetic particle mixing algorithm, demonstrates exemplary path planning capabilities. Given that the multi-UAV path planning quandary inherently embodies a quintessential multi-objective optimization challenge, the intrinsic strengths of genetic algorithms render them particularly adept for addressing such intricacies. Coding is the basis of genetic algorithms and uses different coding methods under different conditions. Encoding methods can not only quickly arrange the elements within a finite set, but also use the advantages of genetic algorithms for fast calculations.
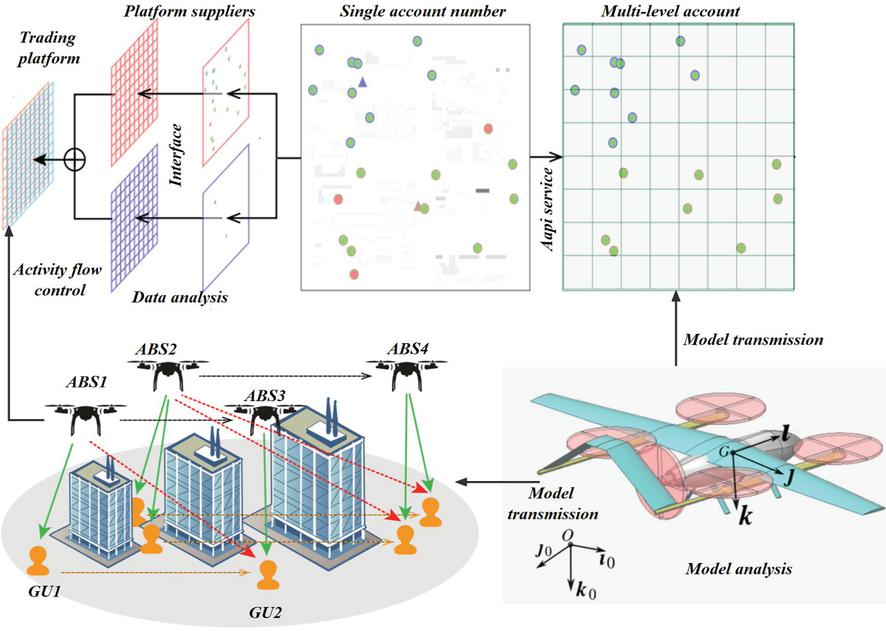
Figure 4 Multi-target optimization diagram.
Figure 4 shows the multi-objective optimization diagram of the drone, where there are many ways to complete the copy operation, including roulette wheel and elite competition. Completion is achieved through a roulette wheel. The crossover process aims to utilize the genetic information of parental chromosomes and generate offspring from them. By utilizing the excellent characteristics of two parental chromosomes, evolution can be guided in some way. Crosser can be done between monochromatic paths. Randomly select two paths as parent paths and then cross them. This system can achieve two types of crossing: single point crossing and two-point crossing. If this operation generates invalid offspring, such as when it conflicts with a constraint, these offspring will be discarded and new offspring will be generated until sufficient offspring are generated. The application of genetic algorithms in optimization problems is very common, with fewer requirements for objective functions and constraints, and good robustness and adaptability. Genetic algorithms do not require the problem to be continuous or differentiable. And the convergence speed of genetic algorithm is relatively slow, while the speed of particle swarm algorithm is faster. Therefore, algorithms can be combined to overcome the above problems.
5 Experimental Analysis
The data analysis in Figure 5 reveals significant differences in the convergence trajectory between the proposed IGAPSO algorithm and the traditional genetic algorithm (GA). Specifically, the IGAPSO algorithm outperforms the GA algorithm in terms of convergence speed and accuracy. For example, suppose the optimal solution to a problem is 100. In the 10th iteration, the GA algorithm may reach a solution of 90, while the IGAPSO algorithm may reach a solution of 95. This indicates that the convergence speed of the IGAPSO algorithm is faster. If we continue to iterate until the 100th iteration, the GA algorithm may reach a solution of 95, while the IGAPSO algorithm may reach a solution of 100. This indicates that the convergence accuracy of the IGAPSO algorithm is higher. Although the initial convergence speed of the two algorithms appears to be similar, the GA algorithm tends to favor local optimization in later iterations, while the IGAPSO algorithm can continuously optimize and ultimately converge to the optimal solution. This indicates that the IGAPSO algorithm has stronger global search ability when dealing with complex optimization problems. These data analysis results indicate that the IGAPSO algorithm outperforms traditional genetic algorithms in both convergence speed and accuracy when solving complex optimization problems. This provides important reference for us to choose and design optimization algorithms.
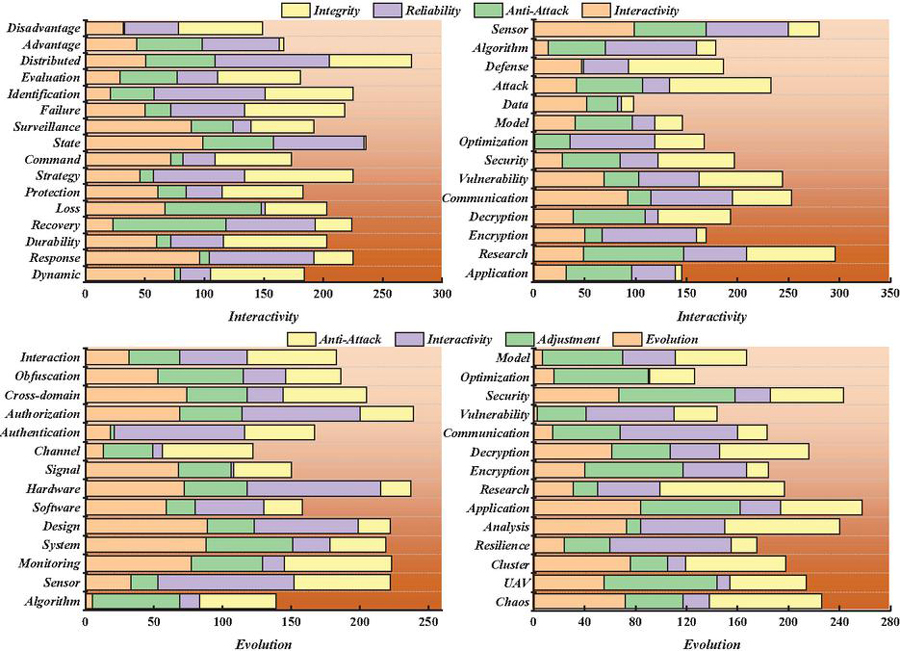
Figure 5 Algorithm evaluation diagram.
The data analysis in Figure 6 shows that the planned path length is short and the flight altitude difference is small. These four drones can effectively avoid terrain obstacles and radar detection areas, while avoiding collisions with other drones. This is achieved through the use of genetic algorithms for path planning, which search for the optimal solution in terms of path length and flight altitude. For example, suppose we have a task that requires a drone to fly from point A to point B, and there are some obstacles in the terrain. Genetic algorithms may find a path that allows drones to minimize flight distance while avoiding obstacles. At the same time, the algorithm also considers the flight altitude to ensure the safety of the drone during flight.
Through simulation and experiments, we have verified the effectiveness of the proposed method. The results indicate that these four drones can efficiently and safely complete tasks. This not only proves the application value of genetic algorithms in drone path planning, but also provides us with an effective tool to improve the efficiency and safety of drones in executing tasks. This is of great significance for the widespread application of drones, such as cargo transportation, environmental monitoring, search and rescue, etc.
Figure 6 UAV path assessment diagram.
Figure 7 Adaptive weight radar diagram.
As shown in Figure 7, our proposed improved particle swarm optimization algorithm adopts a multi-directional improvement strategy, increases the inertia weight of the particle swarm, and designs an adaptive inertia weight. These improvements have significantly improved the speed and accuracy of the algorithm. For example, suppose we have an optimization problem with an optimal solution of 100. In the 10th iteration, traditional particle swarm optimization algorithms may achieve a solution of 90, while our improved algorithm may achieve a solution of 95. This indicates that our improved algorithm has a faster convergence speed. If we continue to iterate until the 100th iteration, traditional particle swarm optimization algorithms may achieve a solution of 95, while our improved algorithm may achieve a solution of 100. This indicates that our improved algorithm has higher convergence accuracy. These improvements enable our algorithm to have stronger performance and higher efficiency in handling complex optimization problems. This is of great significance for solving practical problems such as path planning, scheduling optimization, machine learning, etc.
6 Conclusion
Based on the principle of unmanned collaboration and network modeling, we establish the system capability model of UAV. The model includes 2D and 3D map model, UAV mobility performance constraint model and UAV path planning cost evaluation model. To solve the path planning problem, we propose an improved artificial group algorithm based on a Stanislavsky chaotic system. At the same time, we also designed the ground obstacles and threat evaluation index model, including fuel consumption threat, high threat and radar threat. In terms of network security, we employ a chaotic genetic algorithm with fast convergence, obvious periodicity, high randomness, and sensitivity to initial conditions. This algorithm improves the honey source selection and search methods, alleviates the local optimal trend and improves the quality of the solution. Next, we employ a refined genetic algorithm for path planning and gradually deviate from the local optimal trajectory to identify global optimal paths in a complex and dynamic battlefield landscape.
In hydrodynamics, we find that the Reynolds number also increases proportional when the velocity in the flow field increases with the other parameters constant. Specifically, at a Reynolds number of 20, a stable and symmetric vortex appears downstream of the obstacle. When the Reynolds number increases to 40, the vortex changes from a symmetric steady state to a fluctuating asymmetric mode, thereby delimiting the critical boundary of Re 40. Beyond the Reynolds number of 80, the flow field shows the appearance of alternating asymmetric boundary layers. When the Reynolds number reaches 500, the flow field transforms to a fully turbulent state. Based on the above findings, we propose a 3D path planning algorithm that jointly utilizes particle swarm optimization and synthetic refinement. This approach innovatively addresses path planning challenges for UAVs in volumetric environments, particularly those constrained by mission-specific parameters.
References
[1] Abdulhae, O. T., Mandeep, J. S., and Islam, M. (2022). Cluster-based routing protocols for flying ad hoc networks (FANETs). IEEE Access, 10, 32981–33004.
[2] Li, J., Kang, H., Sun, G., Liang, S., Liu, Y., and Zhang, Y. (2021, May). Physical layer secure communications based on collaborative beamforming for UAV networks: A multi-objective optimization approach. In IEEE INFOCOM 2021-IEEE Conference on Computer Communications (pp. 1–10). IEEE.
[3] Pham, Q. V., Nguyen, D. C., Mirjalili, S., Hoang, D. T., Nguyen, D. N., Pathirana, P. N., and Hwang, W. J. (2021). Swarm intelligence for next-generation networks: Recent advances and applications. Journal of Network and Computer Applications, 191, 103141.
[4] Phadke, A., and Medrano, F. A. (2022). Towards Resilient UAV Swarms—A Breakdown of Resiliency Requirements in UAV Swarms. Drones, 6(11), 340.
[5] Alsolai, H., Alzahrani, J. S., Maray, M., Alghamdi, M., Qahmash, A., Alnfiai, M. M., … and Mustafa Hilal, A. (2022). Enhanced artificial gorilla troops optimizer based clustering protocol for UAV-assisted intelligent vehicular network. Drones, 6(11), 358.
[6] Alrayes, F. S., Alotaibi, S. S., Alissa, K. A., Maashi, M., Alhogail, A., Alotaibi, N., … and Motwakel, A. (2022). Artificial intelligence-based secure communication and classification for drone-enabled emergency monitoring systems. Drones, 6(9), 222.
[7] Singh, S. P., Piras, G., Viriyasitavat, W., Kariri, E., Yadav, K., Dhiman, G., … and Khan, S. B. (2023). Cyber Security and 5G-assisted Industrial Internet of Things using Novel Artificial Adaption based Evolutionary Algorithm. Mobile Networks and Applications, 1–17.
[8] Abualigah, L., Diabat, A., Sumari, P., and Gandomi, A. H. (2021). Applications, deployments, and integration of internet of drones (iod): a review. IEEE Sensors Journal, 21(22), 25532–25546.
[9] Pan, Y., Yang, Y., and Li, W. (2021). A deep learning trained by genetic algorithm to improve the efficiency of path planning for data collection with multi-UAV. Ieee Access, 9, 7994–8005.
[10] Stolfi, D. H., Brust, M. R., Danoy, G., and Bouvry, P. (2020, May). Competitive evolution of a UAV swarm for improving intruder detection rates. In 2020 IEEE international parallel and distributed processing symposium workshops (IPDPSW) (pp. 528–535). IEEE.
[11] Shafique, A., Mehmood, A., and Elhadef, M. (2021). Survey of security protocols and vulnerabilities in unmanned aerial vehicles. IEEE Access, 9, 46927–46948.
[12] Hadi, H. J., Cao, Y., Nisa, K. U., Jamil, A. M., and Ni, Q. (2023). A comprehensive survey on security, privacy issues and emerging defence technologies for UAVs. Journal of Network and Computer Applications, 213, 103607.
[13] Shehab, M., Abualigah, L., Al Hamad, H., Alabool, H., Alshinwan, M., and Khasawneh, A. M. (2020). Moth–flame optimization algorithm: variants and applications. Neural Computing and Applications, 32, 9859–9884.
[14] Khan, A., Zhang, J., Ahmad, S., Memon, S., Qureshi, H. A., and Ishfaq, M. (2022). Dynamic positioning and energy-efficient path planning for disaster scenarios in 5G-assisted multi-UAV environments. Electronics, 11(14), 2197.
[15] Stolfi, D. H., Brust, M. R., Danoy, G., and Bouvry, P. (2021, September). Improving Pheromone Communication for UAV Swarm Mobility Management. In International Conference on Computational Collective Intelligence (pp. 228–240). Cham: Springer International Publishing.
[16] Sun, G., Li, J., Liu, Y., Liang, S., and Kang, H. (2021). Time and energy minimization communications based on collaborative beamforming for UAV networks: A multi-objective optimization method. IEEE Journal on Selected Areas in Communications, 39(11), 3555–3572.
[17] Zhang, H., and Li, P. (2023). Research on Location Privacy Protection Technology in Wireless Sensor Networks Based on Big Data. Journal of Cyber Security and Mobility, 12(06), 845–868.
[18] Quan, R., Liang, W., Wang, J., Li, X., and Chang, Y. (2024). An enhanced fault diagnosis method for fuel cell system using a kernel extreme learning machine optimized with improved sparrow search algorithm. International Journal of Hydrogen Energy, 50, 1184–1196.
[19] Chamola, V., Hassija, V., Gupta, S., Goyal, A., Guizani, M., and Sikdar, B. (2020). Disaster and pandemic management using machine learning: a survey. IEEE Internet of Things Journal, 8(21), 16047–16071.
[20] Chanal, P. M., Kakkasageri, M. S., and Manvi, S. K. S. (2021). Security and privacy in the internet of things: computational intelligent techniques-based approaches. In Recent Trends in Computational Intelligence Enabled Research (pp. 111–127). Academic Press.
[21] Banafshehvaragh, S. T., and Rahmani, A. M. (2023). Intrusion, anomaly, and attack detection in smart vehicles. Microprocessors and Microsystems, 96, 104726.
[22] Li, H., Sun, Q., Zhong, Y., Huang, Z., and Zhang, Y. (2023). A soft resource optimization method for improving the resilience of UAV swarms under continuous attack. Reliability Engineering & System Safety, 237, 109368.
[23] Shi, Y., Lin, Y., Li, B., and Li, R. Y. M. (2022). A bi-objective optimization model for the medical supplies’ simultaneous pickup and delivery with drones. Computers & Industrial Engineering, 171, 108389.
[24] Kuru, K., Ansell, D., Khan, W., and Yetgin, H. (2019). Analysis and optimization of unmanned aerial vehicle swarms in logistics: An intelligent delivery platform. Ieee Access, 7, 15804–15831.
[25] Li, R., Wang, A., Sun, G., Li, J., and Zheng, X. (2022, June). Bi-objective Optimization for Collaborative UAV Secure Communication under Forest Channel. In 2022 IEEE Symposium on Computers and Communications (ISCC) (pp. 01–07). IEEE.
[26] Zhou, G., Zhang, W., Chen, A., He, M., and Ma, X. (2019). Rapid detection of rice disease based on FCM-KM and faster R-CNN fusion. IEEE access, 7, 143190–143206.
[27] Lu, Y. (2023). Security and Privacy of Internet of Things: A Review of Challenges and Solutions. Journal of Cyber Security and Mobility, 12(06), 813–844.
[28] Mukherjee, A., Misra, S., and Raghuwanshi, N. S. (2019). A survey of unmanned aerial sensing solutions in precision agriculture. Journal of Network and Computer Applications, 148, 102461.
[29] Yazdani, M., Babagolzadeh, M., Kazemitash, N., and Saberi, M. (2019). Reliability estimation using an integrated support vector regression–variable neighborhood search model. Journal of Industrial Information Integration, 15, 103–110.
[30] Orlovskyi, R., Kharytonov, S., Samoshchenko, I., Us, O., and Iemelianenko, V. (2023). Countering Cybercrime Under Martial Law. Journal of Cyber Security and Mobility, 12(06), 893–910.
Biography
Xiaobo Song graduated from the Xi’an Institute of Microelectronics Technology in 2008. Working in Equipment Management and UVA Engineering College, Air Force Engineering University. Her research interests include system engineering, Control Science & Engineering.
Journal of Cyber Security and Mobility, Vol. 13_4, 657–676.
doi: 10.13052/jcsm2245-1439.1344
© 2024 River Publishers