Research on Adaptive Fault Diagnosis Control System of Audio Management Component Environment of Airborne Electronic Equipment
Xiaomin Xie*, Shuguo Gui, Renwei Dou and Xuanfu Du
Intelligent Manufacturing College, Anhui Vocational and Technical College, Hefei 230011, China
E-mail: 357106305@qq.com
*Corresponding Author
Received 27 February 2023; Accepted 04 April 2023; Publication 08 May 2023
Abstract
The system adopts adaptive control, and the controller of audio management component is directly applied to the controlled object. Through online calculation, the model is identified online by using the dynamic characteristics of the object, and the relationship between input and output variables is expressed. It can be corrected by entering and leaving data, which is actually to correct the controller. The initial rules of the controller are composed of default models. Through continuous self-reasoning learning, the controller is optimized to achieve data tracking, fast convergence, strong anti-interference ability and excellent performance. Combining intelligent control with adaptive technology not only expands the scope of adaptive system, but also provides an effective way for intelligent control. The environmental adaptive diagnostic control system uses adaptive technology to adjust the parameters, data and knowledge base of the controller. The system detects IO signal, AD signal and the status data sent by the sub-unit through the internal CAN bus according to the power-on self-check of the unit, and at the same time, it monitors all the status data in real time during the operation, judges the operation of each sub-component, gives an alarm in time and carries out protection control. Through the design of integrated detection module, the overall installation space of detection sensors is reduced, signal interfaces and connecting cables are reduced, and the overall adaptive diagnosis effect can be improved. Through the data recording and storage function, the system stores the operation information of each subunit, compares it with the built-in health data table, and prompts the maintenance information in time.
Keywords: Adaptive control, intelligent control, adaptive diagnostic control system.
1 Introduction
The environmental adaptive diagnosis system of the audio management component of airborne electronic equipment is mainly used for comprehensive detection of the environment inside and outside the cabin, which mainly includes the module for detecting the environment outside the cabin, the module for detecting the environment inside the cabin and the data acquisition unit [1–9]. The integrated environment detection module in the cabin is used to detect the temperature, relative humidity, overpressure inside and outside the cabin, harmful gas concentration, oxygen concentration and so on. The extravehicular environment detection unit can detect the data of extravehicular temperature, relative humidity and electromagnetic radiation in real time [10–16]. Among them, the cabin environment detection unit includes temperature and humidity sensors, various gas sensors, dust sensors, differential pressure sensors, etc., which can monitor the concentrations of CO, CO, NO, VOC, smoke and dust, O, temperature and humidity in the cabin, overpressure in the cabin and other data in real time. Firstly, according to the overall demand, the selected research method has carried out relevant technical research and practical application investigation at home and abroad, and analyzed the equipment status, development trend and technical development and application in the field of audio management component environmental control system in detail. Based on the basic principles of advanced performance and mature technology, the technical route selection and overall scheme design optimization were carried out. The data acquisition unit receives signals from sensors and alarms, processes the signals, uploads the collected environmental parameters in real time, and receives instructions such as self-inspection of electromagnetic radiation alarms [17–19]. Among them, the temperature and humidity adjustment module is widely used and has many faults. The module is mainly used for cabin temperature and humidity adjustment and has the functions of refrigeration, heating and dehumidification. It mainly includes electric scroll compressor, condenser, condensing fan, liquid storage dryer, expansion valve, evaporator, drainage pump, drainage solenoid valve, electric heater, etc. The appearance of the environmental detection module of the audio management component is shown in Figure 1.
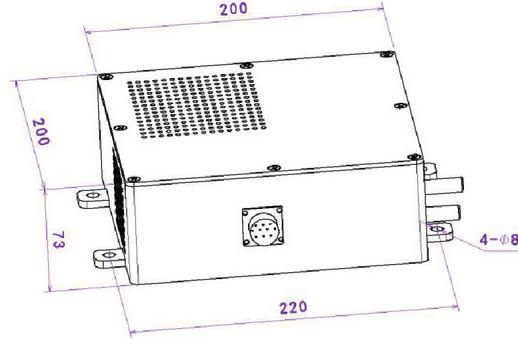
Figure 1 Outline drawing of environmental detection module of audio management component.
2 Structural Strength Check Analysis of Audio Management Component
2.1 Mechanical Modeling Analysis
In order to ensure that the structural strength design of the environmental control system of audio management components conforms to the relevant national regulations and meets the requirements of environmental adaptability indexes related to vibration and shock, ANSYS workbench is used for mechanical simulation calculation. The mechanical simulation model of the environmental control host is shown in Figure 2.
Figure 2 Mechanical simulation model of environmental control host.
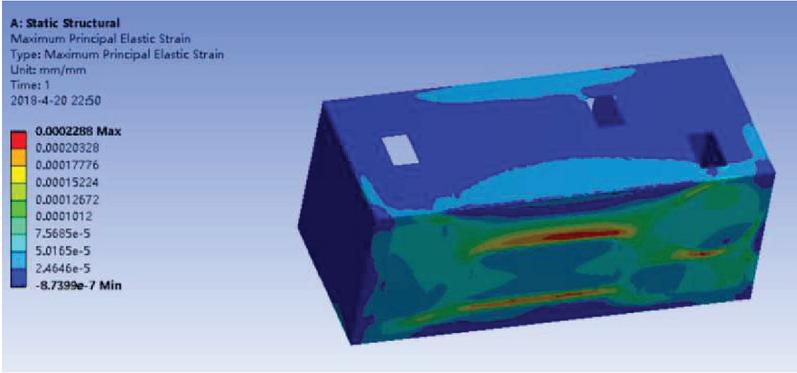
Figure 3 Deformation nephogram of environmental control host.
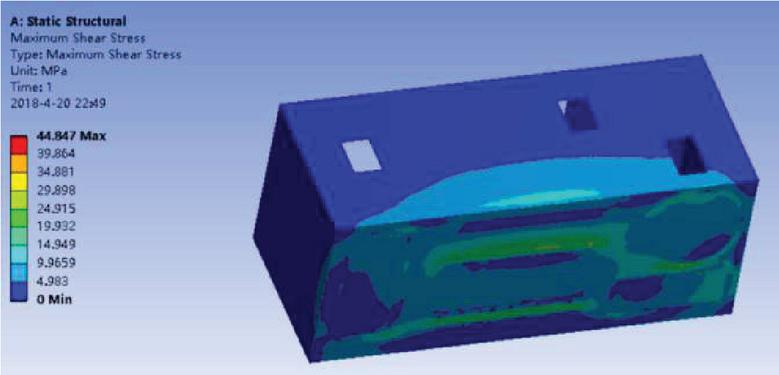
Figure 4 Cloud diagram of stress analysis of environmental control host.
The stress and deformation nephogram of the mechanical simulation of the environmental control host is shown in Figures 3 and 4.
The results of mechanical simulation show that the maximum displacement deformation of the environmental control host is 0.0003 mm, the maximum stress value is 39.8 MPa, and the yield limit of the materials used meets the strength design requirements.
2.2 Mechanical Strength Calculation
Check and calculate the main stress parts of the audio management component environmental control host. In the process of vibration and impact, the M12 bolts used in the four mounting feet are subjected to large shear force, so the shear force of the M12 bolts used in the installation is now checked. The impact acceleration is 40 g, the mass of environmental control device is m 100 kg, and the number of screws is n 4.
The bolt material is A2-70, MPa, and the safety factor S 3.0. According to the third strength theory, MPa, , and the shear force meets the use requirements.
3 Reliability Modeling Analysis of Environmental Adaptive Fault Diagnosis System
The reliability model of airborne electronic equipment shows the relationship between system reliability and component unit reliability, which is expressed in mathematical analytical form and called reliability mathematical model [20]. This relationship is expressed in graphic form and is called reliability block diagram. The purpose of establishing reliability model is to allocate, predict and evaluate the reliability of the system. According to the information of reliability model, working cycle and task time, mathematical expressions or computer programs are drawn up. Using these expressions and programs and the corresponding data of failure rate and success probability, basic reliability and task reliability can be allocated, predicted and evaluated. According to the Reliability Prediction Manual of Electronic Equipment (GJB/Z299C), the distribution and frequency of mechanical parts faults and previous design experience, and based on the reliability test of audio management module, the reliability calculation is carried out. From the calculation results of electrical control failure of audio management module, it can be seen that the mean time between failure MTBF of this diagnostic control system is 1203 h, which is greater than the overall requirement of 1000 h. Meet the requirements of reliability index. The reliability model should include a reliability block diagram and a reliability mathematical model, so as to express the reliability logical relationship and quantitative relationship between the environmental adaptive system and the constituent units. The basic reliability block diagram is shown in Figure 5.

Figure 5 Basic reliability block diagram.
The basic reliability is a series model, and the mathematical expression of reliability is:
| (1) |
Where:
– System reliability.
– Reliability of i(i 1,2…n) th subsystem.
When the life distribution of each subsystem is exponential, that is , then
| (2) |
Where:
– System failure rate.
– Failure rate of each subsystem.
Mean time between failure MFBF of the system is:
| (3) |
3.1 Maintainability Modeling
Maintainability model is a physical model and a mathematical model established by analyzing and evaluating system maintainability. In the stage of engineering development, the maintainability model is established by using the block diagram method of system function hierarchy in physical model. The adaptive fault test of audio management component can automatically test the main performance of equipment according to the programmed program, and can also be manually operated if necessary. When the self-test system fails, it will not affect the normal operation of the equipment. For example, in the electrical design, the possible faults of the equipment are analyzed, and fault prompts and fault alarms are provided. When the system fails, the equipment can automatically detect the failed parts and display them. The audio management component adaptive diagnosis system needs a certain average system repair time. Used to check whether the working state of the component units is normal at the beginning of unit power-on; It is used to periodically and continuously carry out condition monitoring and fault diagnosis of the unit during the execution of the task; It is used for the maintenance inspection of the unit when it is not working, to check and confirm the faults in the work, and to further isolate the faults.
The audio management component environment adaptive fault diagnosis system allocates MTTR indicators according to each module, and the MTTR allocation model is shown in Figure 6.
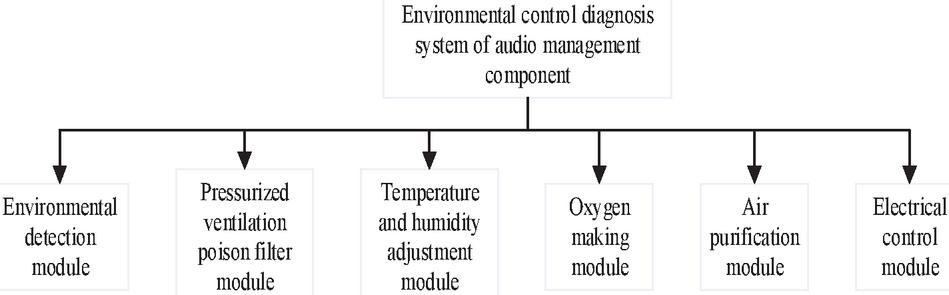
Figure 6 MTTR allocation model.
3.2 Maintainability Prediction
The required average repair time of the system is 1h. The failure rate of each module of the equipment can be predicted from the reliability, and the maintainability of the equipment system can be predicted from the Mcti(min) of each module and the distribution of the average maintenance time as shown in Table 1.
Table 1 Maintainability prediction
| Operation Time of Subsystem Maintenance | ||||||||
| i | Activities (min) | Mcti | Mcti | |||||
| Functional Module | 10h | Position | Isolation | Resolve | Replace | Test | (min) | i |
| Environmental monitoring module | 254 | 2 | 2 | 10 | 10 | 2 | 39 | 9906 |
| Ventilation and pressurization poison filter module | 135 | 2 | 2 | 10 | 10 | 3 | 50 | 6750 |
| Temperature and humidity adjustment module | 165 | 2 | 2 | 10 | 10 | 3 | 62 | 10230 |
| Oxygen making module | 87 | 2 | 2 | 5 | 10 | 3 | 40 | 3480 |
| Air purification module | 50 | 1 | 2 | 4 | 5 | 2 | 27 | 1350 |
| Electrical control module | 140 | 3 | 2 | 3 | 5 | 2 | 25 | 3500 |
| Total | 831 | 42.4 | 35216 | |||||
If the system consists of n subsystems, and the failure rate and mean time to repair (MTTR) of each repairable subsystem are known, the mean time to repair of the system is:
| (4) |
Where:
– Failure rate of I-th subsystem.
Mcti – Average repair time of I-th subsystem.
Mct – Mean time to repair system.
The predicted value of instruction system and average repair time is 42.4 min, and the predicted value of average repair time is less than the index value of 60 min.
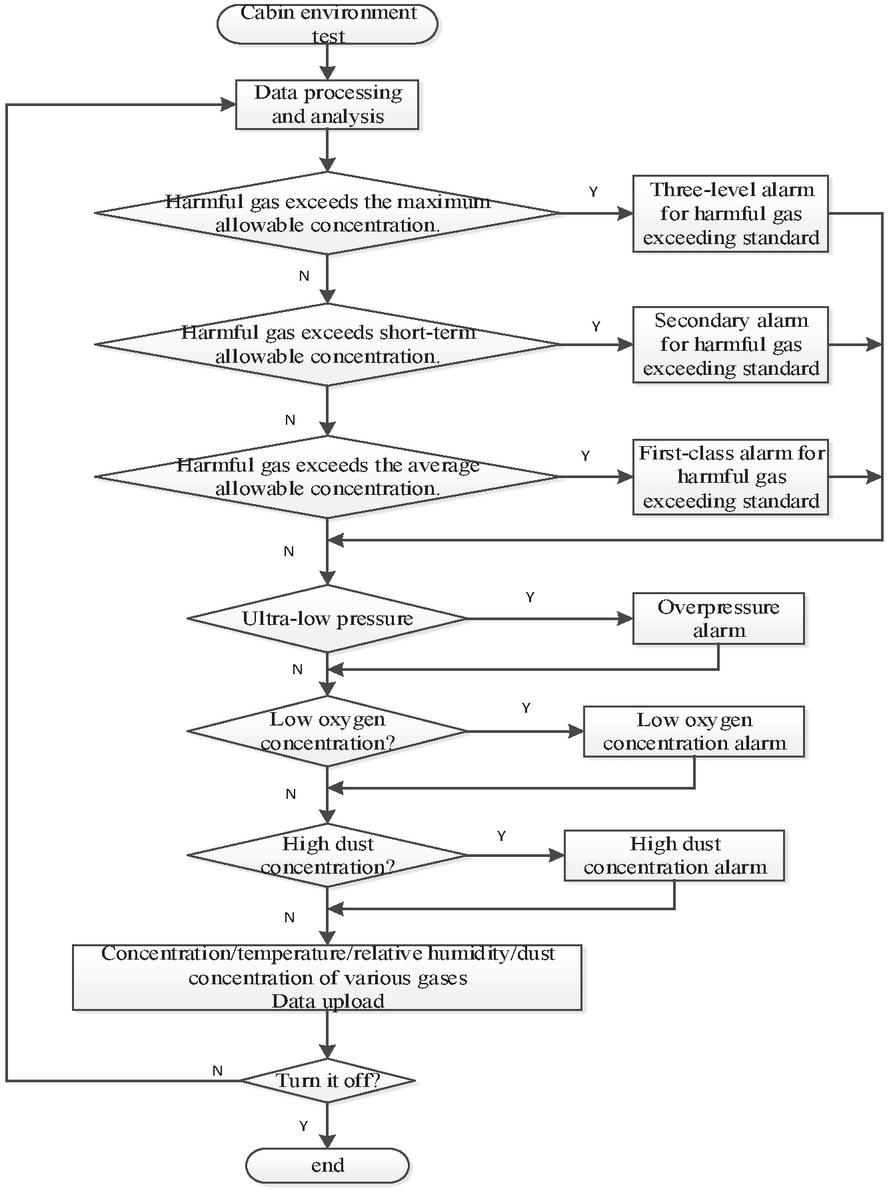
Figure 7 Flow chart of on-line real-time sampling detection for cabin environment detection.
According to the actual performance requirements of airborne electronic equipment, it is stipulated that the average repair time of audio management components at the grass-roots level is not more than 60 min, and the device has the ability to quickly repair faults at the component level. Through BITE and airborne test instruments, the component-level rapid diagnosis is completed, the LRU is located, and the faulty LRU is replaced to complete the component-level maintenance. The electromechanical LRU (repairable) replaced at the component level is sent to the relay level, and the LRU sent for repair is further diagnosed, and the fault is isolated to the SRU and replaced. If the reliability is not considered, the repair time will be further shortened to less than 30 min, and further attempts can be made in this respect in the later stage.
4 Adaptive Detection and Analysis of Audio Management Component Environment
In-cabin environment detection of audio management module adopts online real-time sampling detection, and the sampling interval is 5 s. Among them, according to the relevant provisions of the national standard, according to the time-weighted average allowable concentration, short-time contact allowable concentration and maximum allowable concentration, the alarm levels are divided into primary alarm, secondary alarm and tertiary alarm in turn. The flow chart of on-line real-time sampling detection for cabin environment detection is shown in Figure 7.
4.1 Temperature and Humidity Detection
According to the general requirements, the system should have the ability to detect temperature and humidity inside and outside the cabin [21]. The integrated temperature and humidity sensor is selected, and its sensor parameters are shown in Table 2. Among them, the results of the temperature and humidity measurement error range of the system are shown in Figures 8 and 9. The error range of relative humidity measurement error results at different temperatures is shown in Figure 10.
Table 2 Temperature and humidity sensor parameters
| Sensor | Detection | Detection | Measuring | Standard | Maximum |
| Name | Parameter | Principle | Range | Error | Error |
| Humiture | Temperature | Platinum resistor | 1C | 1.5C | |
| sensor | Relative humidity | Aluminium oxide | 3% | 5% |
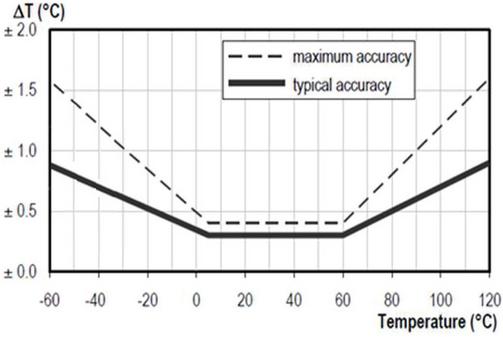
Figure 8 Error range of cabin temperature measurement.
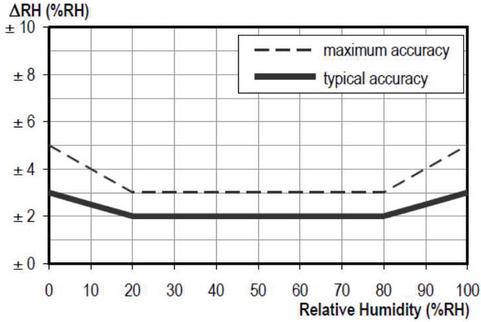
Figure 9 Error range of relative humidity measurement.
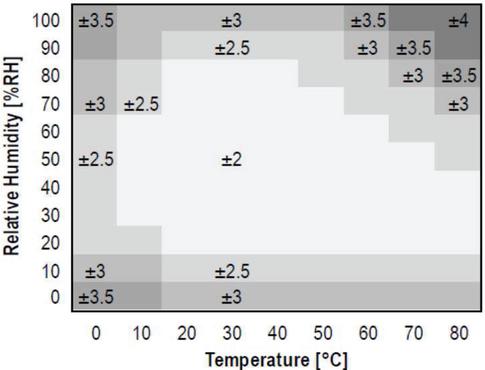
Figure 10 Error range of relative humidity measurement at different temperatures.
4.2 Electromagnetic Radiation Monitoring and Alarm
Electromagnetic radiation detection adopts “single GM counter time to count wide range radiation detection method”. The GM drive module is realized by hardware, which will drive the GM counter to work according to the specified time sequence and output the measurement results under the control of the single chip microcomputer, and the single chip microcomputer can calculate the dose rate through appropriate processing. When particles are incident, ionization occurs in the GM tube. Under the action of high voltage, the ionized positive and negative particles drift to the two poles of the GM tube and produce avalanche discharge. After the detection circuit of the driving module detects the discharge, the high voltage of the GM tube is immediately reduced, and the GM tube stops discharging. The generated particles drift to the two poles at a lower voltage until they are completely absorbed. The driving module reduces the high voltage of GM tube, records the waiting time before the particle incident, and makes corresponding treatment. When the particles produced by the GM tube are completely absorbed, the driving module immediately raises the working voltage of the GM tube, and the GM tube resumes its detection function.
Table 3 Sensor selection
| Sensor Category | Detection Principle | Measuring Range | Resolution Ratio | |
| Carbon monoxide sensor | Electro-chemistry | 0 500ppm | 0.5 ppm | |
| Oxygen sensor | Zirconium oxide | 0 100% | 0.1%FS | |
| Carbon dioxide sensor | Infrared | 0 20000 ppm | 10 ppm | |
| Temperature and | Temperature | RTD | 1C | |
| humidity sensor | Humidity | Aluminium oxide | 0 100% | 3%FS |
| Nitrogen dioxide sensor | Electro-chemistry | 0 100 ppm | 0.1 ppm | |
| Ammonia sensor | Electro-chemistry | 0 100 ppm | 0.1 ppm | |
| Hydrogen sulfide sensor | Electro-chemistry | 0 200 ppm | 0.1 ppm | |
| Sulfur dioxide sensor | Electro-chemistry | 0 100 ppm | 0.1 ppm | |
| VOC sensor | Photoion | 0 500 ppm | 1 ppm | |
| Dust sensor | Optical densimeter | 0.01 2 mg/m | 0.01 mg/m | |
| Differential pressure sensor | Strain type | 0 1000 Pa | 1%FS | |
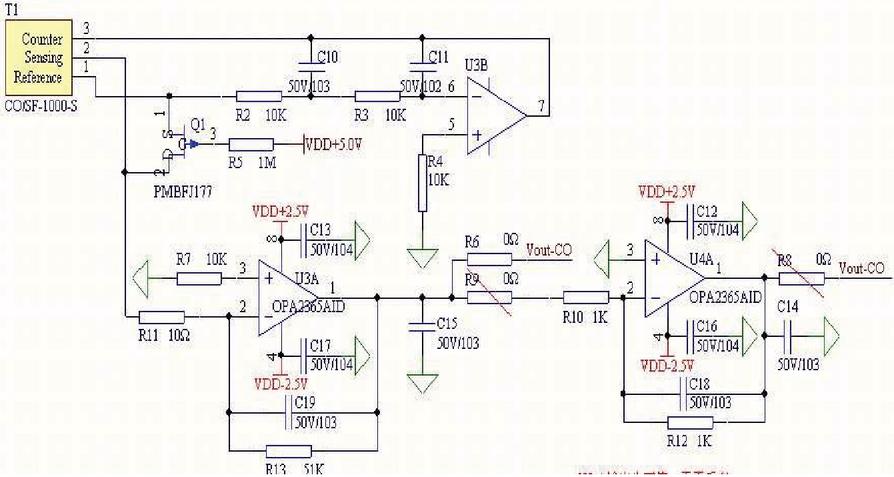
Figure 11 Circuit diagram of different CO detection signal processing.
4.3 Selection of Gas Sensor and Design of Signal Processing Circuit
Based on the overall technical requirements and the limit standard of harmful gas concentration in the cabin, the integrated environmental detection module in the cabin adopts an integrated structure [22–24]. In order to meet the requirements of miniaturization, high sensitivity, fast response, low power consumption and wide temperature working range of sensors in the integrated diagnostic system for environmental control of audio management components of airborne electronic equipment, the design requirements of sensors in the integrated system are shown in Table 3. The CO detection signal processing circuit is shown in Figure 11. The NO detection signal processing circuit is shown in Figure 12. The HS detection signal processing circuit is shown in Figure 13; The SO detection signal processing circuit is shown in Figure 14.
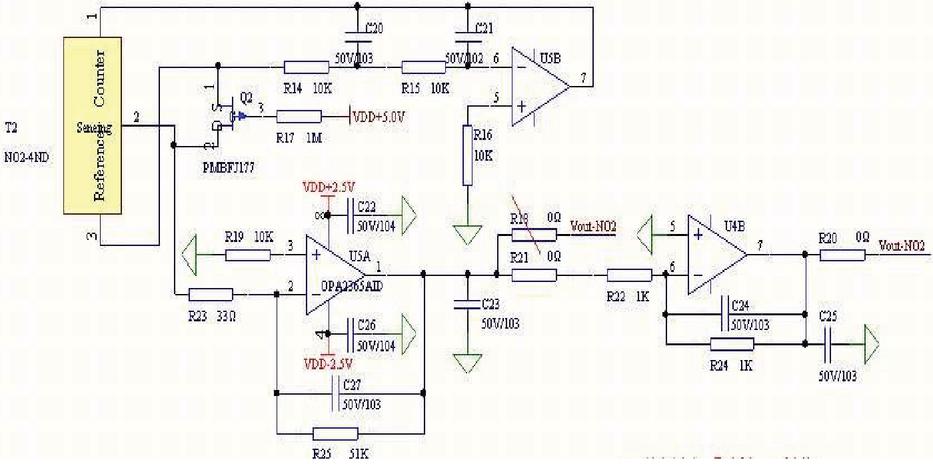
Figure 12 Different NO detection signal processing circuits.
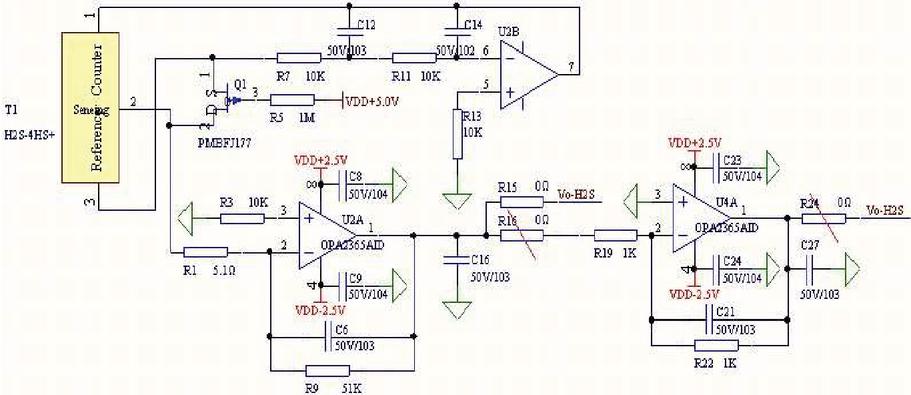
Figure 13 Different HS detection signal processing circuits.
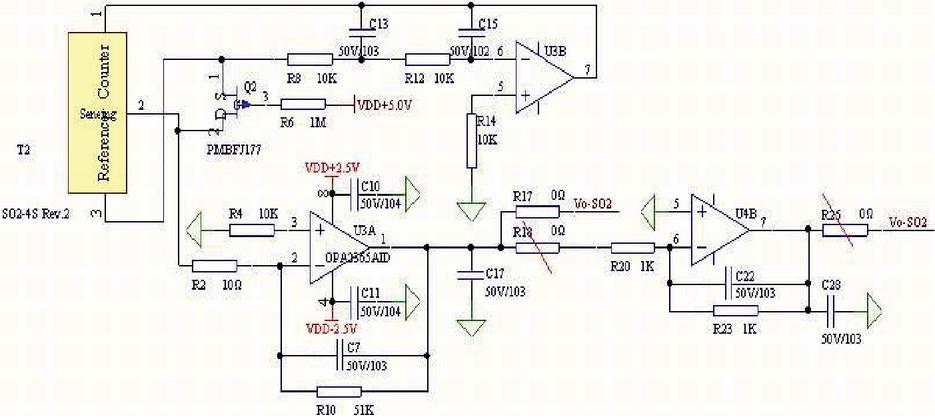
Figure 14 Different SO detection signal processing circuits.
In order to avoid the zero drift and extreme temperature drift of the sensor, a balanced bridge circuit with “in-bridge compensation method” is designed. At the same time, the sensitivity compensation is realized by using the negative temperature characteristics of diodes and adding multiple semiconductor diodes. The nonlinearity is compensated for the second time in software processing, so that the accuracy and sensitivity of the sensor in detecting the whole temperature range are realized. The hardware design block diagram of sensor temperature compensation is shown in Figure 15.
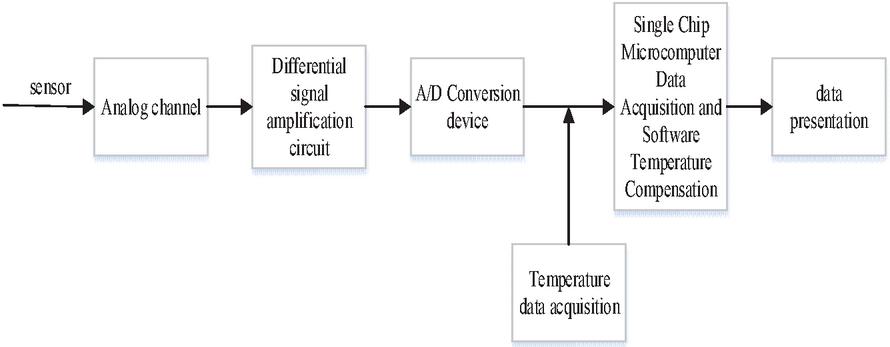
Figure 15 Hardware design block diagram of temperature compensation for different sensors.
4.4 Results Analysis of Environmental Adaptive Gas Purification System
Aiming at the shortage of air purification in the cabin by ventilation in the audio management module of airborne electronic equipment at present, this system studies the addition of internal circulation air purification function on the basis of ventilation and ventilation function to remove harmful gases in the cabin, and the purification system can be effectively regenerated and used for a long time.
During the internal circulation adsorption purification, the air in the cabin is sucked by the fan, and the dust and large-particle impurities in the air are pretreated by the primary filter, and then the harmful gas is filtered by the regenerative purification filter element, and the harmful gas concentration in the cabin is reduced to the required range through continuous circulation filtration. Regenerative purification filter element adopts the principle of temperature change adsorption/desorption, and the special adsorbent contained in it can adsorb and remove carbon dioxide, carbon monoxide, nitrogen dioxide, ammonia, hydrogen sulfide, sulfur dioxide, VOC and other harmful gases at room temperature. When the filter element is saturated, it can be regenerated by regeneration function. During regeneration, it is heated by built-in microwave heating, and harmful substances are desorbed at high temperature, and then pumped out of the cabin by vacuum pump. The adsorption capacity of the purification filter element is restored.
The lower limit value of oxygen concentration is determined according to the altitude. When the cabin concentration is lower than the lower limit value, an alarm will be given, and when the oxygen concentration is higher than the upper limit value, the alarm will be lifted. The specific research results are shown in Table 4.
Table 4 Sensor oxygen concentration limit
| Lower Limit of | Upper Limit Value of | |
| Altitude/m | Oxygen Concentration/% | Oxygen Concentration/% |
| 0 | 19 | 23 |
| 1000 | 22 | 26 |
| 2000 | 25 | 29 |
| 3000 | 29 | 33 |
| 4000 | 34 | 38 |
| 5000 | 39 | 43 |
| 6000 | 45 | 55 |
| 7000 | 56 | 62 |
| 8000 | 68 | 78 |
| 9000 | 85 | 86 |
| 10000 | 96 | 97 |
For the cockpit of airborne electronic equipment, a new type of special adsorbent is used for circulating purification and filtration in the air purification system. The cabin is designed with a space of 4 m, and the calculation requirements of adsorbent loading are shown in Table 5.
Table 5 Calculation of adsorbent loading
| Purification | Required | Adsorption | ||
| Initial | Target | Adsorption | Capacity | |
| Harmful | Concentration | Concentration | Capacity | of 4 m |
| Substance | (mg/m) | (mg/m) | (mg/m) | Cabin Space(g) |
| CO | 4500 | 300 | 4200 | 16.8 |
| CO | 20 | 0 | 20 | 0.08 |
| NH | 20 | 0 | 20 | 0.08 |
| NO | 3 | 0 | 3 | 0.012 |
| SO | 5 | 0 | 5 | 0.02 |
| HS | 5 | 0 | 5 | 0.02 |
| VOC | 20 | 0 | 20 | 0.08 |
The adsorption capacity of adsorbent is about 3%, so the total adsorbent loading is:
The more adsorbent loading, the more harmful substances can be absorbed by the purification filter element at a time, and the longer the continuous purification time of the filter element at a time. Considering the design margin and the installation space, the adsorbent loading of the purification filter element is designed to be 1000 g.
If the completion time of single purification is designed as 10 min, the required air volume for purification cycle is:
Table 6 Purification performance of absorption and purification system for harmful substances
| Harmful Substance | Initial Concentration (mg/m) | Concentration After 30 min Natural Attenuation (mg/m) | 30 min Natural Attenuation Rate % | Start the Purification System and Control the Concentration Within 30 min (mg/m) | Purification Efficiency % |
| CO | 4500 | 4430 | 1.56% | 300 | 93.23% |
| CO | 20 | 19.6 | 2.00% | 1.8 | 90.82% |
| NH | 20 | 19.3 | 3.50% | 1.6 | 91.71% |
| NO | 3 | 2.9 | 3.33% | 0.2 | 93.10% |
| SO | 5 | 4.8 | 4.00% | 0.3 | 93.75% |
| HS | 5 | 3.2 | 36.00% | 0.3 | 90.63% |
The designed purified circulating air volume is 30 m/h.
The experimental simulation shows that the purification efficiency of the air purification system for harmful gases within 30 min minutes is greater than 93%. Design and calculation of purification system are as follows:
The purification capacity test of the purification system for different harmful substances is shown in Table 6, in which the initial concentration of harmful substances refers to the time-weighted average allowable concentration limit in the harmful gas concentration limit in the cabin of airborne electronic equipment.
5 Conclusion
The design idea of integrated design and modular construction is adopted in the interior environment control system. In this paper, the adaptive fault diagnosis control system is used to deeply analyze the functions of each module, the performance of each component, the structural characteristics and the relationship between them. Through the integration of functions and structures, the overall integrated design of the cabin environmental control system is realized, which reduces the volume and weight of the system and improves the comprehensive efficiency of the system. Compared with traditional methods, such as expert system and fuzzy C clustering, it has higher reliability and security. According to the architecture and technical system of the vehicle integrated electronic system, the functional units of the interior environment control system, such as environmental detection module, electrical control module and execution module (pressurization and ventilation, anti-virus filtration, temperature and humidity adjustment, oxygen generation and air purification), are integrated into an integrated system through the in-vehicle bus, and the system function integration and information sharing are realized. It can detect the indoor environment temperature and humidity, harmful gases, smoke/dust, and the outdoor environment temperature and humidity, nuclear, chemical and biological weapons, and realize the functions of refrigeration, heating, dehumidification, purification, ventilation, pressurization and poison filtration, oxygen generation, differential pressure inside and outside the cabin, etc. At the same time, it has the ability of electromagnetic radiation protection.
Fund Project: Key Projects of 2020 Excellent Talents Support Program in Colleges and Universities (gxyqZD2020055);
Major projects of natural scientific research in colleges and universities in Anhui Province (2022AH040281);
Key Natural Research Projects of Anhui Vocational and Technical College in 2020 (azy2020kj04);
2021 Anhui Vocational and Technical College Quality Engineering Quality Improvement and Excellence Action Plan Special Project-Key Research Project of Education and Teaching (2021xjtz029);
References
[1] Hang J, Wu H, Ding S, Hua W, Wang Q (2020) A DC-flux-injection method for fault diagnosis of high-resistance connection in direct-torque-controlled PMSM drive system. IEEE Trans Power Electron 35(3):3029–3042.
[2] Md Nor N, Hussain MA, Che Hassan CR (2017) Fault diagnosis and classification framework using multi-scale classification based on kernel Fisher discriminant analysis for chemical process system. Appl Soft Comput 61(2017):959–972.
[3] Md Nor N, Hussain MA, Che Hassan CR (2017) Fault diagnosis based on multi-scale classification using kernel Fisher discriminant analysis and Gaussian mixture model and K-nearest neighbor method. J Teknol 79:89–96.
[4] Swain RR, Dash T, Khilar PM (2019) Investigation of RBF kernelized ANFIS for fault diagnosis in wireless sensor networks. In: Verma N, Ghosh A (eds) Computational intelligence: theories, applications and future directions – volume II. Advances in intelligent systems and computing, vol 799. Springer, Singapore.
[5] Singh G, Jain VK, Singh A (2018) Adaptive network architecture and firefly algorithm for biogas heating model aided by photovoltaic thermal greenhouse system. Energy Environ 29(7):1073–1097.
[6] Misra G, Kumar V, Agarwal A, Agarwal K (2016) Internet of things (iot) – a technological analysis and survey on vision, concepts, challenges, innovation directions, technologies, and applications (an upcoming or future generation computer communication system technology). Am J Electr Electron Eng 4(1):23–32.
[7] Yadav A, Swetapadma A (2015) Enhancing the performance of transmission line directional relaying, fault classification and fault location schemes using fuzzy inference system. IET Gener Transm Distrib 9(6):580–591.
[8] Ding J, Zhao W, Miao B et al. (2018) Adaptive sparse representation based on circular-structure dictionary learning and its application in wheelset-bearing fault detection. Mech Syst Signal Process 111: 399–422.
[9] Chen M, Shao H, Dou H et al. (2022) Data augmentation and intelligent fault diagnosis of planetary gearbox using ILoFGAN under extremely limited samples. IEEE Trans Reliab 1–9.
[10] Wang D, Guo Q, Song Y et al. (2019) Application of multiscale learning neural network based on CNN in bearing fault diagnosis. J Signal Process Syst 91(10):1205–1217.
[11] Balaga H, Gupta N, Vishwakarma DN (2015) GA trained parallel hidden layered ANN based differential protection of three phase power transformer. Electr Power Energy Syst 67(3):286–297.
[12] Du ZM, Jin XQ, Yang YY (2009) Fault diagnosis for temperature, flow rate and pressure sensors in VAV systems using wavelet neural network. Appl Energy 86(9):1624–1631.
[13] Han H, Cao ZK, Gu B, Ren N (2010) PCA-SVM-Based automated fault detection and diagnosis (AFDD) for vapor-compression refrigeration systems. HVAC&R Res 16(3):295–313.
[14] Chouaib Chakour, Abdelhafid Benyounes, Mahmoud Boudiaf (2018) Diagnosis of uncertain nonlinear systems using interval kernel principal components analysis: application to a weather station. ISA Trans 83:126–141.
[15] Elshenawy Lamiaa M, Mahmoud Tarek A, Chouaib Chakour (2020) Simultaneous fault detection and diagnosis using adaptive principal component analysis and multivariate contribution analysis. Ind Eng Chem Res 59(47):20798–20815.
[16] Hamed Badihi, Youmin Zhang, Henry Hong (2014) Wind turbine fault diagnosis and fault-tolerant torque load control against actuator faults. IEEE Trans Control Syst Technol 23(4):1351–1372.
[17] Wang X, Cai Y, Li A, et al. (2021) Intelligent fault diagnosis of diesel engine via adaptive VMD-rihaczek distribution and graph regularized bi-directional NMF[j]. Measurement 172:108823.
[18] Muralidharan V, Sugumaran V. Feature extraction using wavelets and classification through decision tree algorithm for fault diagnosis of mono-block centrifugal pump. Measurement, 2013, 46: 353–359.
[19] Islam M M M, Kim J M. Automated bearing fault diagnosis scheme using 2D representation of wavelet packet transform and deep convolutional neural network. Comput Industry, 2019, 106: 142–153.
[20] Aljemely AH, Xuan J, Jawad FKJ et al. (2020) A novel unsupervised learning method for intelligent fault diagnosis of rolling element bearings based on deep functional auto-encoder [J]. J Mech Sci Technol 34:4367–4381.
[21] Li S, Wang H, Song L et al. (2020) An adaptive data fusion strategy for fault diagnosis based on the convolutional neural network. Measurement 165:108122.
[22] G. Tao, X. D. Tang, S. H. Chen, J. T. Fei, S. M. Joshi. Adaptive failure compensation of two-state aircraft morphing actuators. IEEE Transactions on Control Systems Technology, vol. 14, no. 1, pp. 157–164, 2006.
[23] Al Younes Y, et al. (2016) Sensor fault diagnosis and fault tolerant control using intelligent-output-estimator applied on quadrotor UAV. In 2016 international conference on unmanned aircraft systems (ICUAS). IEEE.
[24] Mohammadi A, Ramezani A (2019) An active actuator fault-tolerant control of a quadrotor based on analytical redundancy relations. Iran J Sci Technol Trans Electr Eng 44(3):1069–1079.
Biographies

Xiaomin Xie received the bachelor’s degree in Electronic Information Engineering from Anhui Jianzhu University in 2008, the master’s degree in detection technology and automatic equipments from China civil aviation university in 2011, respectively. He is currently working as an associate professor at the Department of Intelligent Manufacturing College, Anhui Vocational and Technical College. His research areas include circuit fault diagnosis and intelligent detection, deep learning, and neural network analysis.

Shuguo Gui is currently working as an professor at the Department of Intelligent Manufacturing College, Anhui Vocational and Technical College. His research areas include mechatronic engineering.

Renwei Dou received the bachelor’s degree in Electronic Information Engineering from Anhui university of finance and economics in 2006, the master’s degree in power electronic technology from University Of Anhui in 2020, respectively. He is currently working as an lecturer at the Department of Intelligent Manufacturing College, Anhui Vocational and Technical College. His research areas include circuit fault diagnosis and intelligent detection, deep learning.

Xuanfu Du received the bachelor’s degree in Mechanical Manufacture and Automation from Hefei University of Technology in 2014, the master’s degree in Mechanical Manufacture and Automation from Hefei University of Technology in 2017, respectively. He is currently working as an Teaching assistants and R&D engineers at the Department of Intelligent Manufacturing College, Anhui Vocational and Technical College. His research areas include Electric power technology research, and neural network analysis.
Journal of ICT Standardization, Vol. 11_2, 175–196.
doi: 10.13052/jicts2245-800X.1124
©2023 River Publishers