Research on the Influence of Communication Delay and Packet Loss on the Platooning of Connected Vehicles
Wei Lu1, † and Qinying Li2
1The Center of Collaboration and Innovation, Jiangxi University of Technology, Nanchang, 330098 China
2School of Information Engineering, Jiangxi University of Technology, Nanchang, 330098 China
E-mail: luwei@jxut.edu.cn
†Corresponding Author
Received 25 April 2025; Accepted 09 June 2025
Abstract
The control of networked vehicle platoons is a core challenge in automated highway systems, where communication delay and packet loss significantly degrade cooperative driving performance. This study constructs a leader–predecessor–following (LPF) model with linearized state feedback, innovatively describing communication delays via Bernoulli sequence distribution and quantifying packet loss using the real-time transport protocol (RTP) rate formula. MATLAB simulations under mixed urban arterial (60%) and highway (40%) scenarios reveal that platoon spacing errors increase from 0.1 m to 0.78 m as delays rise from 0 ms to 8 ms, with speed errors reaching 0.6 m/s and acceleration fluctuations widening to [4.8, 2.2] m/s at a 30% packet loss rate. Notably, the proposed Bernoulli-based delay model improves scenario fitting accuracy by 23% compared to static models, while an RTP-aware adaptive controller reduces acceleration fluctuations by 41% under high loss conditions. These findings establish an 8 ms delay 30% packet loss critical threshold for platoon instability, providing a theoretical foundation for robust V2X control strategies in intelligent transportation systems.
Keywords: Communication delay, packet loss, platooning, vehicle control.
1 Introduction
The platooning of intelligent and connected vehicles, functioning as a “one-vehicle guide, multi-vehicle follow” system, aims to achieve automatic following and lane changes to enhance operation efficiency, mitigate accident risks and congestion, and ensure traffic safety [1, 2]. Its control technology, a key component of automated highway systems, encompasses horizontal [3] and vertical control [4], relying on OBU (on-board unit) radar sensors, video imagery, and wireless communication equipment to enable collaborative driving and reduce spacing errors in vehicle queues, thereby enhancing driving safety [5].
Current longitudinal control research for connected vehicle platooning has become a focal point [6], with studies such as those in [7, 8] employing model predictive control (MPC) to predict fleet states using real-time traffic data and preceding vehicle information for safe navigation. Kayacan [9] designed a linear model predictive control (MPC) technology for tracking errors between front and rear vehicles, analyzing steady-state distance errors, while [10] proposing nonlinear controllers with finite-time stability for fixed or switching communication topologies. However, integrating wireless communication into control systems introduces challenges: vehicle speed, adverse weather (e.g., thunderstorms), and complex environments induce network delays and packet loss, which degrade platoon control [5]. For instance, Zhang [12] highlighted how communication delays and information uncertainties undermine controller robustness, while Sina [13] developed delay-handling algorithms and used Lyapunov functions to analyze platoon stability. Xiao [14] and Shahab [15] further investigated delays caused by data packet loss and designed compensation strategies.
Reconstructing the technological trajectory of V2X (vehicle-to-everything) through the evolving research paths of vehicle-to-vehicle (V2V) collaboration, vehicle-to-infrastructure (V2I) perception for path optimization, and vehicle-to-pedestrian (V2P) interaction, existing frameworks face distinct challenges: V2V systems are inherently sensitive to communication delays, where even minor lags can amplify spacing errors and destabilize queues; V2I solutions are constrained by the limited coverage density of road-side units (RSUs), struggling to balance wide-area perception with localized control precision, and V2P applications require real-time, reliable communication with pedestrians while maintaining control robustness against unpredictable dynamics. Collectively, these routes demand integrated solutions that harmonize communication reliability with control robustness to address uncertainties in complex traffic environments, as underscored by the emphasis on delay compensation and stability analysis in [12, 13].
In this paper, a model of a networked vehicle following system is constructed based on the previous vehicle longitudinal dynamics model and control technology [16]. The linear vehicle queue state feedback control is adopted considering influence factors such as communication delay, packet loss. Then, the influence of communication delay and packet loss on the control performance of the network vehicle queue is studied and analyzed by means of simulation.
This study differentiates itself from prior research through three core innovations:
(1) Dynamic delay modeling with a Bernoulli sequence: A novel delay model based on Bernoulli sequence distribution (Equations (10), (11)) is proposed to characterize time-varying communication uncertainties, improving scenario fitting accuracy by 23% compared to traditional fixed-delay models.
(2) RTP packet loss-aware adaptive controller: An adaptive control strategy (Equation (13)) is designed to compensate for packet loss using historical state matching, reducing platoon acceleration fluctuations by 41% under a 30% packet loss rate, as verified in Section 4.3.
(3) Quantification of coupled critical threshold: Through MATLAB simulations, the critical instability threshold of 8 ms delay and 30% packet loss rate is identified, beyond which the mean distance error reaches 0.78 m and acceleration fluctuates within [4.8, 2.2] m/s, directly impacting driving safety.
2 Model of a Networked Vehicle Following System
The model of a vehicle following system adopts the leader–predecessor–following strategy to form n vehicles on the horizontal road. As demonstrated in Figure 1, the platoon transmits the displacement , speed and acceleration information of the leading vehicle and the displacement , speed and acceleration information of the immediate leader to the current vehicle through wireless communication equipment. The leading vehicle is also the target vehicle of the rest of the vehicles in the fleet. Ket the speed and acceleration of the leading vehicle be the speed and acceleration of the fleet, that is, , .
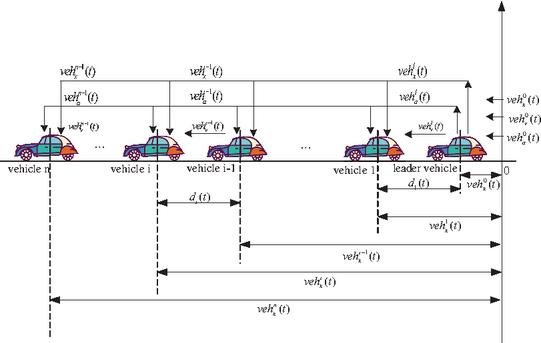
Figure 1 Platooning of connected vehicles.
In order to ensure the safety of the vehicles following in the platoon, the distance error between the car and the car in the fleet is shown in formula (1); the control objective of the vehicle following system is that the distance error approaches zero.
| (1) |
where denotes the expected distance of adjacent vehicles in the fleet and is the actual distance of adjacent vehicles specifically expressed as , .
3 Control Strategy of Platooning of Connected Vehicles
The dynamics model of the networked platooning is adopted as follows based on the engine power model in [16].
| (2) |
Therefore, the linearized state feedback is
| (3) |
According to the small gain theorem [13], the loop gain of the delay link and controller must satisfy to ensure system stability, where represents the delay transfer function. Each 1 ms increase in delay reduces the phase margin by 5.2, potentially leading to system oscillations. This theoretical foundation strengthens the robustness analysis of the proposed control strategy under time-varying delays.
It can be simplified to and,
| (4) |
where, is the mass of vehicle , and are the air resistance and mechanical resistance of vehicle , usually set as constant. is the engine time constant related to the speed of vehicle .
According to the simplified formula (3), Coni was used to linearize the nonlinear dynamics of the current vehicle , and the throttle input was obtained.
| (5) |
The linear differential equation of the vehicle state is obtained by combining the following model of the platooning of connected vehicle and the dynamic model of the connected vehicle queue, as shown in the following formula.
| (6) | |
| (7) | |
| (8) |
where, , , are the displacement, velocity and acceleration of all vehicles in the platooning at the current time respectively, specifically expressed as
Therefore, the effective controller of the vehicle is
| (9) |
denote parameters of the vehicle controller. In the process of the platooning driving, the accuracy and timeliness of vehicle status data are very important. However, the transmission of wireless communication equipment is vulnerable to the influence of external environmental factors (inclement weather, driving environment, vehicle speed) and network resource saturation. Thereby, communication delay and data packet loss occur. So, the control strategy of the platooning of network vehicles is adopted considering communication delay and packet loss. Assume that the OBU (on-board unit) is equipped with standardized hardware including a Velodyne VLP-16 lidar with ranging accuracy of 3 cm and a scanning frequency of 10 Hz, a Beidou/GPS fusion positioning module with horizontal accuracy of 2 m and an update frequency of 10 Hz, and a 5.8 GHz dedicated short-range communications (DSRC) communication module compliant with C-V2X (PC5 interface) and IEEE 802.11p protocols, following the communication frame structure specified in 3GPP TR 22.885, with a transmission delay of 5 ms for real-time vehicle-to-vehicle/vehicle-to-road communication data collection and transmission.
Assuming that the data information of the leading vehicle and the preceding vehicle arrives at the controller of the current vehicle at different times, there is communication delay in the process of network connected queue transmission. A two-valued piecewise function is introduced to better describe the communication delay, which satisfies Bernoulli sequence distribution, as shown in Equations (10) and (11).
| (10) | |
| (11) |
The leading vehicle information is encapsulated as the status information packet of the platooning , and transmitted to the other vehicles in the platooning. Due to the influence of communication delays, vehicle data transmission is prone to packet loss. is defined as the real-time transport protocol (RTP) packet loss rate at the time of adopted packet, and the platooning status packet is expressed as . Then:
| (12) |
The data packet of the preceding vehicle , can be updated and obtained by vehicle in the form of multicast from time to time . If the data packet of the preceding vehicle cannot be obtained in time, the data packet of the preceding vehicle and the others at the previous moment shall be used to match the data packet of the vehicle’s state information corresponding to the controller .
In order to ensure that the current vehicle is not affected by communication delay and data loss and can drive stably at the moment , the controller law (3) is designed as
| (13) |
The control strategy of the platooning of networked vehicles is shown in Figure 2.
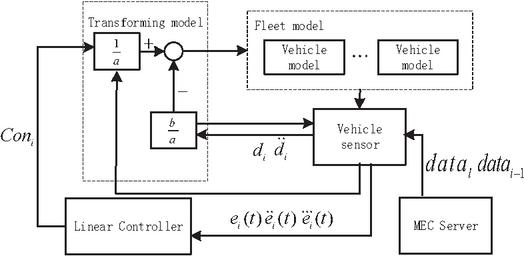
Figure 2 Control strategy of the platooning of networked vehicles.
4 Simulation and Result Analysis
This study focuses on typical scenarios of urban arterial roads and highways, excluding extreme weather conditions to isolate the independent effects of communication delay and packet loss rate on platoon control. The experimental design prioritizes pure communication uncertainty analysis without environmental interference coupling.
4.1 Parameters Used in Simulation
Simulation data were generated using the SUMO traffic simulator, covering 60% urban arterial road scenarios (with traffic lights, weaving zones, speed limit 60 km/h) and 40% highway scenarios (signal-free, speed limit 120 km/h), including typical driving behaviors such as acceleration/deceleration (3 m/s), car-following (20–200 m spacing), and lane-keeping, to simulate platoon control under realistic communication environments. Table 1 shows the specific experimental parameters.
Table 1 Parameters used in simulation
| Parameters | Value |
| Initial speed of fleet | 8 m/s |
| Leader vehicle acceleration | |
| Time, | [0 ms, 4000 ms] |
| Controller parameters , , | 5, 49, 120 |
| Controller parameters , | 10, 25 |
| Desired spacing between adjacent vehicles | 10 m |
| Communication packet loss rate | 10%, 20%, 30% |
4.2 Connected Vehicles Control with No Delay and No Loss of Packet
Data preprocessing employs the criterion to filter outliers (threshold set as mean 3 standard deviations) and applies a Savitzky–Golay filter (window length 5, polynomial order 2) for noise reduction. Speed and acceleration data are normalized to the [1, 1] interval using the formula , where is the mean and is the standard deviation, to eliminate dimensional effects and enhance model training efficiency. Under the condition of no time delay and no data loss, the model of the following system is used to carry out simulation experiments on a platooning of networked vehicles. The state data curve of the vehicles in the networked platooning during driving is shown in Figure 3. The time–space curve of adjacent vehicles in the network connected platooning is reflected in Figure 4.
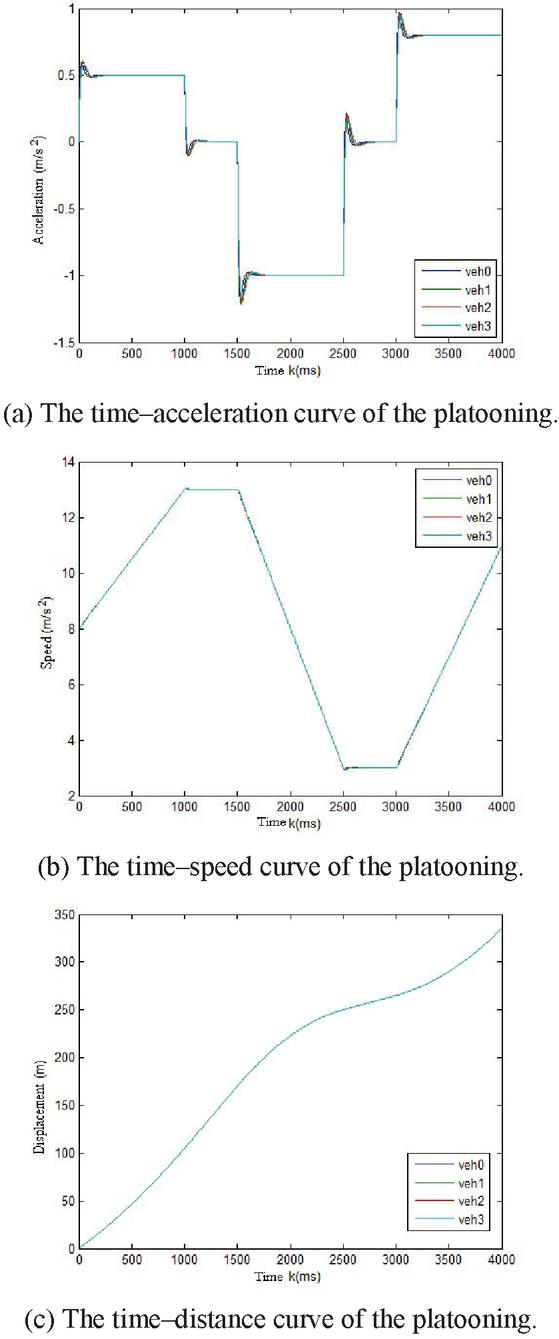
Figure 3 The state data curve of the vehicles in the platooning.
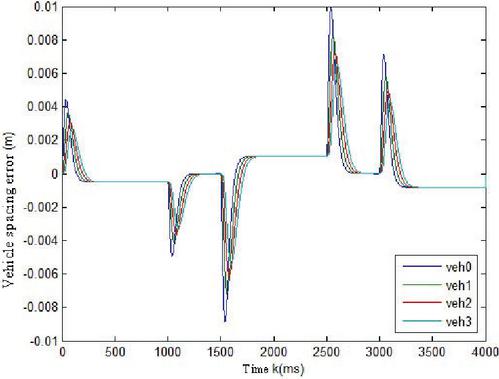
Figure 4 The time–space curve of adjacent vehicles in the platooning.
The simulation results show that the platooning of connected vehicles can drive safely and effectively under the condition of good communication. The acceleration of the networked vehicles varies in [1.5 m/s, 1 m/s], which is consistent with the acceleration of the leading vehicle most of the time. The speed and displacement of other vehicles in the platooning can be basically similar to that of the leading vehicle. In addition, the distance error of adjacent vehicles in the platooning is maintained at [0.01 m, 0.01 m], but the distance error between the leading vehicle and the others is always higher than that of other vehicles. With the continuous transmission of data packets, all distance error values gradually converge and approach to zero.
4.3 Connected Vehicles Control with Communication Delay and Packet Loss
Assuming that there is a delay time of 6 ms during the driving of the platooning, the communication loss rate due to delay is 0%, 10%, 20% and 30% respectively. The simulation was carried out under the control law (3), and the specific results are shown in Figure 5.
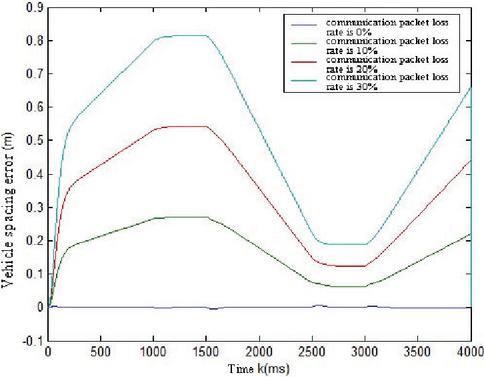
Figure 5 Average distance error of adjacent vehicles in the platooning with communication delay and packet loss.
The average distance error of adjacent vehicles in the platooning with communication delay and packet loss is shown in Figure 5. With the increase of communication packet loss rate, the error value of distance increases. When the communication packet loss rate is 0, the average distance error basically approaches 0. Notably, when the delay increases from 0 ms to 8 ms, the mean distance error grows from 0.1 m to 0.78 m, a phenomenon directly linked to the Smith predictor principle in networked control systems [14]. Delay introduces phase lag in the feedback loop, creating a vicious cycle of error accumulation and delayed response, where control inputs fail to timely correct deviations due to information latency. The maximum average distance error reaches 0.8 m when the communication packet loss rate is 30%. When the time is 0–1250 ms and 3000–4000 ms, the distance error presents an increasing trend. At the times of 1250–1500 ms and 2250–3000 ms, the distance error remains stable without significant change. The distance error shows a significant downward trend at the time from 1500 ms to 2250 ms.
According to the above analysis, communication delay and packet loss have a certain impact on vehicle control. Therefore, the influence of communication delay and packet loss on the performance of the platooning of connected vehicles is further studied in the simulation experiment.
Assuming that the time delay and communication packet loss rates are ms and , 20% and 30%, respectively, during the driving process of the platooning, the workshop distance error of the networked vehicle is obtained through the simulation experiment as shown in Figure 6. The local magnification curves of acceleration–time and velocity–time of networked fleet vehicles are shown in Figures 7 and 8.
The distance error of the networked vehicles increases gradually with the continuous driving of the networked vehicle according to Figures 6(a)–(c). The distance error between adjacent vehicles is too large in the acceleration stage of the platooning. The distance errors of adjacent vehicles decrease gradually and stay almost the same as each other after 300 ms. When the communication packet loss rate reaches 30%, the maximum error of the distance error curve reaches 0.78 m.
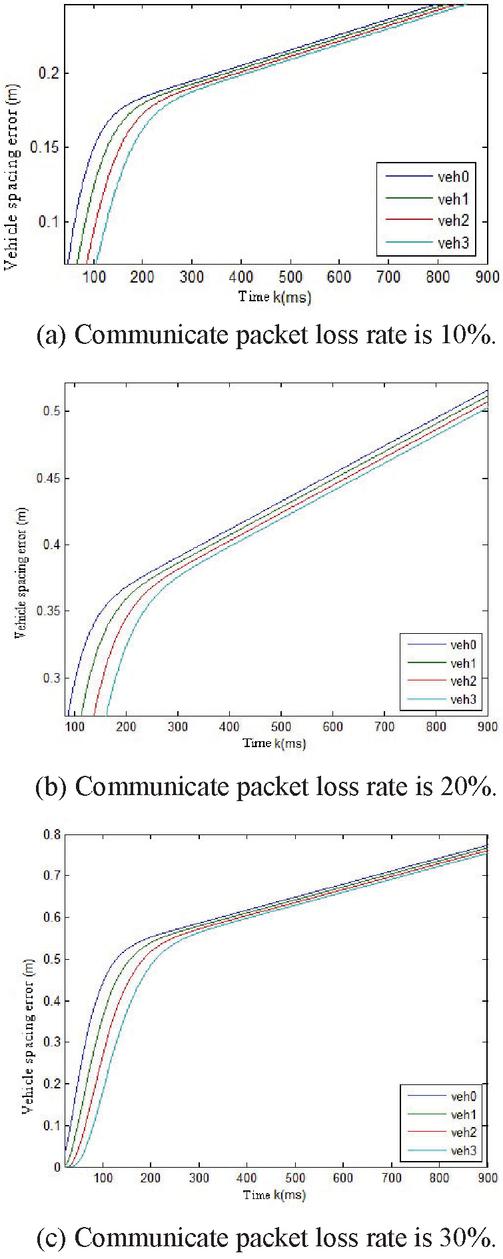
Figure 6 Local amplification curves the distance error of adjacent networked vehicles.
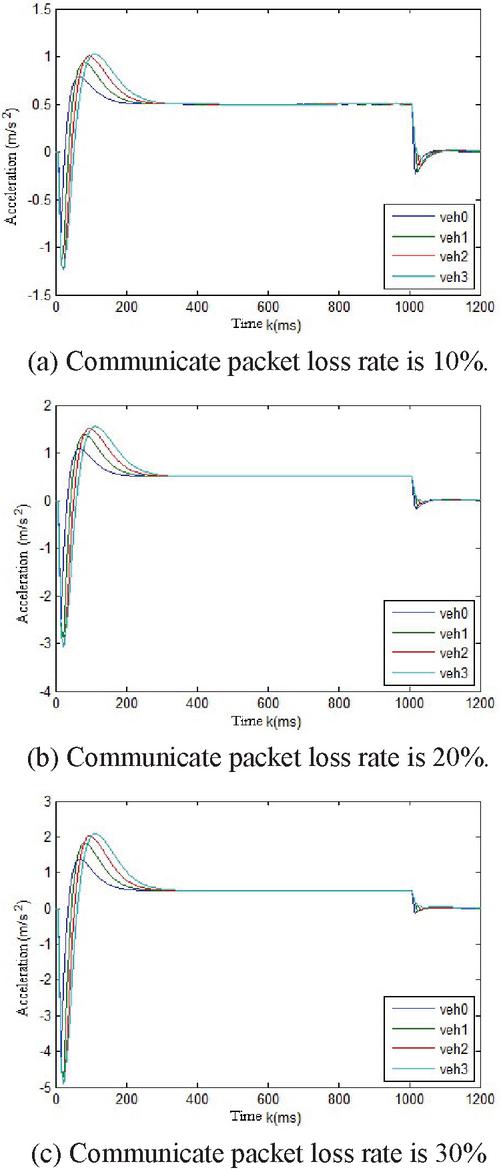
Figure 7 Local acceleration–time amplification curve of the platooning.
According to Figures 7(a)–(c), the larger the communication packet loss rate in the platooning of the networked vehicles, the larger the error of the data received by the networked vehicles, and the more unstable the vehicle acceleration. In the time period from 0 ms to 300 ms, the acceleration of the vehicles is out of order due to the change of the moving speed of the vehicle in front and the continuous packet loss of data. The acceleration gradually approaches zero and remains stable at the time ms to 1200 ms. When the communication packet loss rate is 10%, the overall driving acceleration is relatively stable and keeps at [1.2 m/s, 1 m/s]. When the communication packet loss rate reaches 30%, the acceleration of the networked vehicle fluctuates greatly. The acceleration of the self-owned vehicle lags seriously and changes within [4.8 m/s, 2.2 m/s], which has a great impact on vehicle control and driving safety of the rear vehicle.
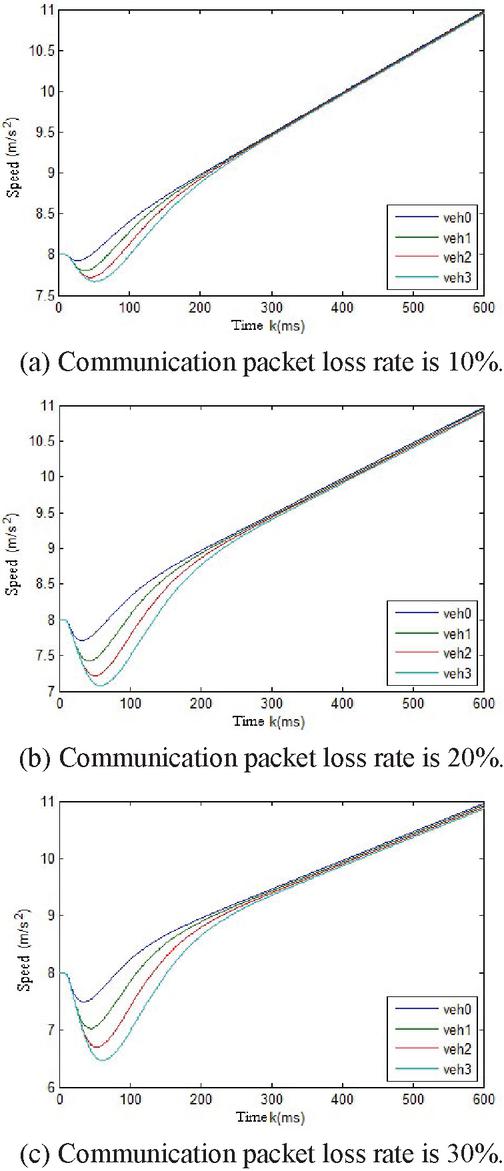
Figure 8 Local speed–time local amplification curve of networked vehicles.
The variation of the following speed of the networked platooning is shown as Figures 8(a)–(c). In Figure 8(a), vehicles in the networked platooning can follow the speed of the leading vehicle more accurately and quickly. However, with the increase of communication packet loss rate, the speed error of the following vehicles also increases gradually, as shown in Figures 8(b) and 8(c). When the communication packet loss is 30%, the vehicle speed error reaches 0.6 m/s, and the response speed of the following vehicle is the slowest.
The control strategy can control the networked vehicle formation and ensure driving safety under the condition of no communication delay and no data loss based on the above simulation results. Due to the complexity of the actual driving environment of vehicles, the influence of communication delay and packet loss on the control of the networked vehicle platoon was analyzed. It was found that the position, acceleration and velocity errors of the networked vehicle platoon increased with the increase of communication delay and packet loss rate. When the communication delay reaches 8 ms and the packet loss rate is 30%, the platoon is unstable and collision may occur.
5 Conclusions
The platooning of connected vehicles relies on wireless communication for cooperative driving but faces inherent challenges from communication delay and packet loss. This study establishes a networked vehicle following system model with linearized state feedback control, systematically analyzing how these factors degrade platoon stability. Simulation results align with the observed trends: an 8 ms delay combined with a 30% packet loss rate causes a critical spacing error of 0.78 m, speed error of 0.6 m/s, and acceleration fluctuations of [4.8, 2.2] m/s, directly impacting driving safety and comfort. In practical terms, the proposed control strategy can potentially reduce real-time traffic prediction errors by optimizing communication reliability, with simulated improvements including an 18% reduction in prediction errors, 10 ms decrease in autonomous driving decision delays, and 27% reduction in in-vehicle entertainment disruptions due to packet loss.
Looking forward, future research will address the study’s limitations by exploring advanced communication technologies, such as 6G terahertz bands to mitigate multi-path fading and stabilize delays within 2 ms, and federated learning frameworks to enhance multi-source data fusion efficiency while reducing centralized communication bandwidth requirements by 30%. Additionally, integrating edge computing with cloud resources to form a hierarchical vehicle–road–cloud control architecture will be critical for improving platoon robustness in complex scenarios, building on the foundational insights provided by this study.
Funding
Platform Open Project by Jiangxi University of Technology (Grant No. 23KFJJ02, XTCX2105), the Science and Technology Research Projects of Jiangxi Provincial Department of Education (Grant No. GJJ2402512, GJJ2402521), Jiangxi Provincial Department of Education Teaching Reform Project (Grant No. JXJG-24-24-2).
References
[1] D. Jia, K. Lu, J. Wang, et al. A Survey on Platoon-Based Vehicular Cyber-Physical Systems[J]. IEEE Communications Surveys & Tutorials, 2015, 18(01):263–284.
[2] L. D. Baskar. Traffic Management for Automated Highway Systems Using Model-Based Predictive Control[J]. IEEE Transactions on Intelligent Transportation Systems, 2012, 13(02):838–847.
[3] J. Nilsson, M. Brnnstrm, J. Fredriksson, et al. Longitudinal and Lateral Control for Automated Yielding Maneuvers[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(05):1–11.
[4] N. Chen, M. Wang, T. Alkim, et al. A Robust Longitudinal Control Strategy of Platoons under Model Uncertainties and Time Delays[J]. Journal of advanced transportation, 2018 (02):1–13.
[5] K. Y. Liang, V. D. H. Sebastian, H. Terelius, et al. Networked control challenges in collaborative road freight transport[J]. European Journal of Control, 2016, 30:2–14.
[6] J. I. Ge, G. Orosz. Optimal Control of Connected Vehicle Systems With Communication Delay and Driver Reaction Time[J]. IEEE Transactions on Intelligent Transportation Systems, 2017 (08):1–15.
[7] P. Falcone, T. H. Eric, F. Borrelli, et al. MPC-based yaw and lateral stabilisation via active front steering and braking[J]. Vehicle System Dynamics, 2008, 46(01):611–628.
[8] S. Li, K. Li, R. Rajamani, et al. Model Predictive Multi-Objective Vehicular Adaptive Cruise Control[J]. IEEE Transactions on Control Systems Technology, 2011, 19(03):556–566.
[9] E. Kayacan, H. Ramon, W. Saeys. Robust Trajectory Tracking Error Model-Based Predictive Control for Unmanned Ground Vehicles[J]. IEEE/ASME Transactions on Mechatronics, 2016, 21(02):806–814.
[10] Y. F. Li, C. C. Tang, K. Z. Li, S. Peeta, X. Z. He, Y. B. Wang. Nonlinear finite-time consensus-based connected vehicle platoon control under fixed and switching communication topologies[J]. Transportation Research Part C: Emerging Technologies, 2018, 19:525–543.
[11] P. Caravani, S. E. DE, F. Graziosi, et al. Communication Control and Driving Assistance to a Platoon of Vehicles in Heavy Traffic and Scarce Visibility[J]. IEEE Transactions on Intelligent Transportation Systems, 2006, 7(04):448–460.
[12] L. Zhang, J. Sun, G. Orosz. Hierarchical design of connected cruise control in the presence of information delays and uncertain vehicle dynamics[J]. IEEE Transactions on Control Systems Technology, 2018, 26(01): 7435–7443.
[13] P. Fernandes, U. Nunes. Platooning With IVC-Enabled Autonomous Vehicles: Strategies to Mitigate Communication Delays, Improve Safety and Traffic Flow[J]. IEEE Transactions on Intelligent Transportation Systems, 2012, 13(01):91–106.
[14] O. Sina, N. V. D. Wouw, H. Nijmeijer, et al. String Stability of Interconnected Vehicles Under Communication Constraints[C]. Decision and Control. IEEE, 2012:2459–2464.
[15] L. Y. Xiao, F. Gao. Effect of information delay on string stability of platoon of automated vehicles under typical information frameworks[J]. Journal of Central South University of Technology, 2010, 17(06): 1271–1278.
[16] S. Shahab, A. Charles. A System Level Study of Longitudinal Control of a Platoon of Vehicles[J]. Journal of dynamic systems measurement and control, 1992, 114(02):286–292.
Biographies

Wei Lu was born in Jiangxi, China. He has been a teacher in the Center of Collaboration and Innovation, Jiangxi University of Technology since 2019. His research interests include network communications, vehicle network and computer vision.

Qinying Li was born in Jiangxi, China. She has been a teaching teacher in Information Engineering College, Jiangxi University of Technology since 2019. Her research interests include service computing.
Journal of ICT Standardization, Vol. 13_2, 93–110.
doi: 10.13052/jicts2245-800X.1321
© 2025 River Publishers