Fusion of Information in Indoor Localization Techniques
P. Kanakaraja*, Sarat K. Kotamraju and K. Ch Sri Kavya
Electronics and Communication Engineering, Koneru Lakshmaiah Education Foundation, Greenfields, Vaddeswaram, A.P, India, 522502
E-mail: pamarthikanakaraja407@gmail.com; kksarat@kluniversity.in; kavya@kluniversity.in
*Corresponding Author
Received 22 October 2021; Accepted 28 December 2021; Publication 05 March 2022
Abstract
In this work, a study of location systems in indoor environments is carried out, starting with the measurement techniques used, the different types of methodologies that can be applied to obtain the position of a device, and the technologies most used to solve these kinds of problems. Lately, it has been an expansion in utilizing location-based services, which builds the investigation of this framework. Also, while the outdoor location is substantially more progressed, the indoor location is continually under audit and, by its inclination, requires a lot tighter precision. The indoor environment can lead the communication from global navigation system and GPS system. The ultrawide band and WLAN techniques are many communication protocols those applications need proper techniques to guide indoor environment. The main objective of this article is based on making a review of the state of the art of location systems in indoor environments, analysing the strengths and weaknesses of existing systems and analysing the possibility of proposing, from a theoretical point of view, the use of information fusion techniques to improve existing systems. Specifically, the possibility of using a system architecture in which several technologies are merged to achieve a more precise result will be analysed. To compare various existing Indoor Navigational methods advantages, disadvantages, and applications. All proposed Indoor Methods based on the requirement the user utilizes required localization techniques. This article mainly focuses on sensor fusion techniques. Moreover, this research introduces an architecture with different layers based on sensor fusion techniques to smooth indoor navigations. The novel methodology providing efficient outcomes like sensitivity 98.34%, accuracy 97.89%, Recall 96.78% and F measure 96.73%.
Keywords: RSS fingerprinting, AOA, TDOA, IMU sensors, Bluetooth, Wi-Fi.
1 Introduction
Information technologies and telecommunications today have become a daily element in our lives. A clear example is a mobile phone (Smartphone) and recently tablets, which have become the central element of communication for people and are an indispensable part of our society, having revolutionized communication and social interaction [1]. Although most people use these means to communicate in the traditional sense (calls, messages, etc.) or more modern methods, such as Internet browsing; The ability of these devices for other types of much more complex tasks such as games, desktop applications and even Global Positioning System (GPS) navigation is undeniable [2].
The information provided by the location infrastructure can provide user services, such as navigation, location of people in emergencies, custody, control of security guards, etc. At present, it is possible to find solutions to these applications [3]. However, all of them have limitations, both at the level of location infrastructure and at the level of the services that can be provided to users. On the one hand, current systems provide specific services focused on navigation, alarm management, etc. It is necessary to propose a general platform that combines services and provides a mechanism to manage many resources and data. On the other hand, the deployment of a specific infrastructure that allows localization (for example, using systems based on the ZigBee protocol) considerably increases the cost of the system, which makes it difficult and in many cases prevents the implementation of this type of technology [4]. In addition, current systems that allow localization using the existing infrastructure (Wi-Fi) requires a long and complex calibration and learning process that, in most cases, is complex to carry out due to the size of the infrastructure to be located or due to the access restrictions to certain spaces [5].
According to studies carried out, most adults who own a Smartphone use this type of location-based services to obtain directions or other information about their current location.
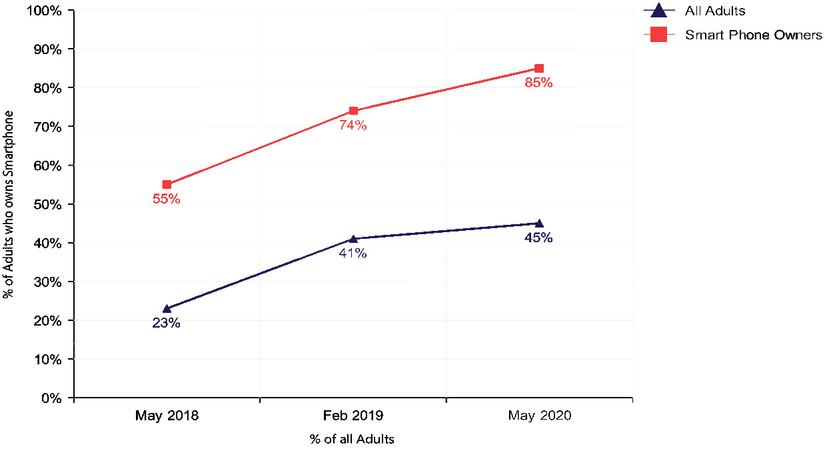
Figure 1 % Of adults who own a Smartphone that uses LBS and % of all adults.
Applications in which it is the pedestrian and not a car that requires some help to find the way in indoor environments, such as an airport, a department store or an exhibition centre, are emerging and acquiring significant relevance to the time to conduct studies on the subject. In outdoor environments, this type of research reaches a more advanced level since the technologies used in these scenarios, and more specifically GPS, have acquired greater development in recent years. An example of this is car navigation systems, which are more than known and widely used [6].
Regarding indoor environments, since the GPS signal is not capable of providing an accurate and truly reliable service, due to the lack of transmission channels of the Line of sight (LoS) between the satellites and the receiver, they have been studied very extensively in recent years a large number of solutions with various technologies. Unlike outdoor spaces, indoor spaces also require much stricter localization precision since the context also varies to space with finer granularity [7]. For example, an error of 5 meters of location in an outdoor environment can still indicate the same street or even the same sidewalk, but 5 meters of error in an indoor space can mean two different environments or rooms in a house or a store. Wi-Fi technology is one of the most used today to solve this need since it is one of the most used technologies that can be practically found today. Most indoor environments. In addition to Wi-Fi, technologies such as Bluetooth, the inertial sensors that smartphones are equipped with, infrared, ultrasound, NFC technology can be highlighted [8].
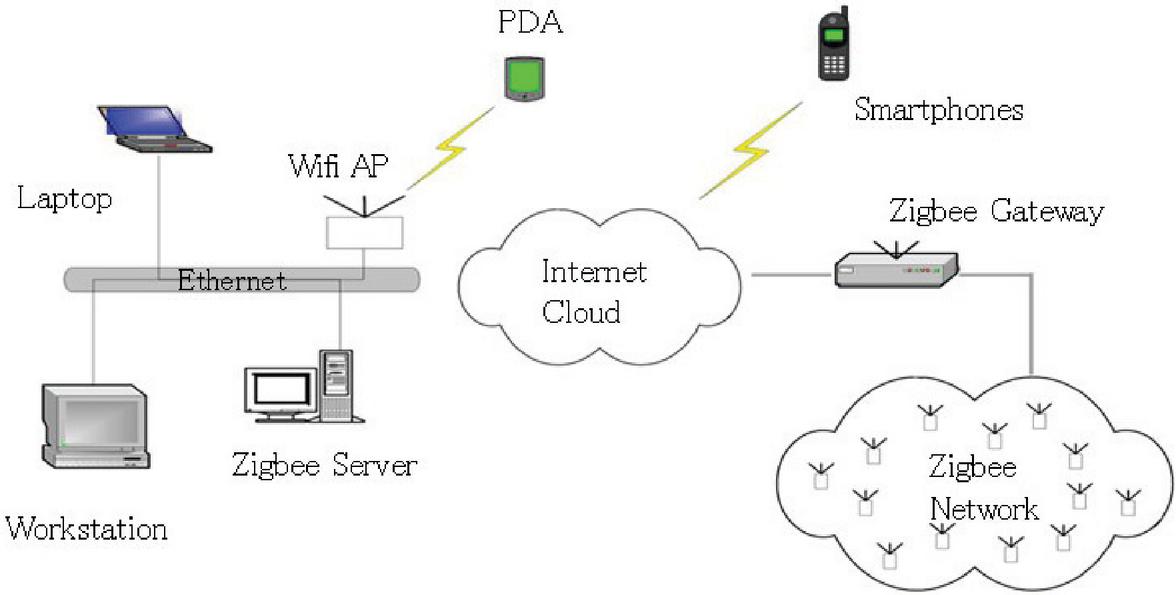
Figure 2 Indoor localization techniques.
The RSS finger print mechanism is more attracting users, here locations of nodes are localized. To deliver its services and relevant information, location-based systems (LBS) necessitate on-the-fly localization of the user. Indoor positioning applications, for example, need accurate user position. Other sensor approaches should be examined since location services such as GPS are ineffective for indoor use. AOA, TDOA, IMU Sensors, Bluetooth, Wi-Fi technologies are used to get node localization information with proposed method.
2 State of the Art
The use of location systems has its origin in the military field through so-called global systems that use the position of the satellites as reference points. Currently, location systems are classified into two large groups:
1. Positioning via satellite.
2. Positioning based on local area networks and metropolitan networks.
Satellite positioning originated the first location systems, the most important and well-known GPS. It was originated by the NAVSTAR company in 1970 and had a military use that allowed the estimation of the position and speed of a vehicle. Subsequently, the Russian system called GLONASS and the Chinese system called Beidou emerged, which has the same characteristics as GPS. Despite its military origin, different civil applications have emerged that have had great acceptance in recent years [9]. One of the best known is Google Maps or TomTom Navigator.
Because GPS systems depend on a United States military system, the European Union decided that it was essential to have its outdoor location system. Therefore, the Galileo system is currently under development, which has two satellites and which is currently in the testing phase on the contrary [10]. However, in this work, we focus on indoor location systems. The literature on the location of interiors is very abundant and extensive due to the great importance that the study of this subject has been acquiring in recent years.
This section introduces some of the different measurement techniques used for indoor locating. They have been classified in such a way that, on the one hand, a review will be made of the measures related to the geometric constraints, such as the measurement by arrival time, by the arrival time difference, by arrival angle and depending on the amplitude of the received signal [11]. And on the other hand, self-measurement techniques will be studied, that is, those with information about the node’s acceleration and orientation called inertial measurement units.
2.1 Measurement Techniques
This section introduces some of the different measurement techniques used for indoor locating. They have been classified in such a way that, on the one hand, a review will be made of the measures related to the geometric restrictions, such as the measurement by arrival time, by arrival time difference, by arrival angle and depending on the amplitude of received signal. And on the other hand, self-measurement techniques will be studied, that is, those that have information about the acceleration and orientation of the node, called inertial measurement units.
(1) Time of Arrival (TOA)
Like the time difference of arrival (TDOA) technique, the time of arrival technique uses information related to the separation distance between a pair of nodes, called transmitter and receiver [12]. This type of measurement is based on calculating the time of flight (TOF) or the propagation time of a signal travelling between a transmitter and a receiver. To achieve a proper location, at least three sensors and the distances between them must be known. If the number of sensors is less than three, there is a possibility that there is no point of intersection between them. Therefore, there is no reliable solution for localization [13].
Starting from each measurement, it is calculated how far the receiver is measured from each transmitting station. Thus, using geometric methods, the point where different centered circles intersect, each one of them, in a transmitting unit and with a radius similar to the measured distance is obtained as shown in Figure 3.
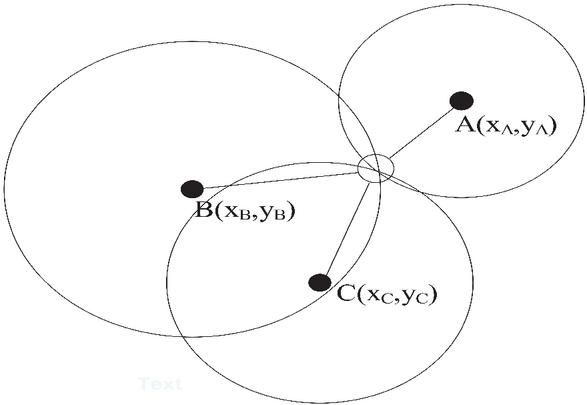
Figure 3 Geometric representation of a TOA positioning system.
As a consequence of time values, the clock’s accuracy is very important in this technique. Therefore the synchronization must be precise [14]. A relative clock drift could still affect precision, so this technique requires a high precision clock in the communication system. The need for synchronization and to send timestamps in the data to achieve sufficient precision in the measurements is one of the disadvantages of this technique. Furthermore, in multipath, with more than three sensors, the measurements are of low precision.
(2) Time of Arrival Difference (TDOA)
The arrival time difference technique, like the arrival time difference technique, is a lateralization technique based on propagation time measurement [15]. Still, unlike the previous one, it is based on the differences in the arrival time of the signals from the different transmitting stations.
The systems that use this technique perform the distance calculation so that the transmitter emits two different pulses. Thus the receiver compares the arrival time of both pulses. As in the prior art, the speed of propagation of the signals has to be known, and thus, the time difference between arrivals will be the distance sought between the transmitter and the receiver as shown in Figure 4.
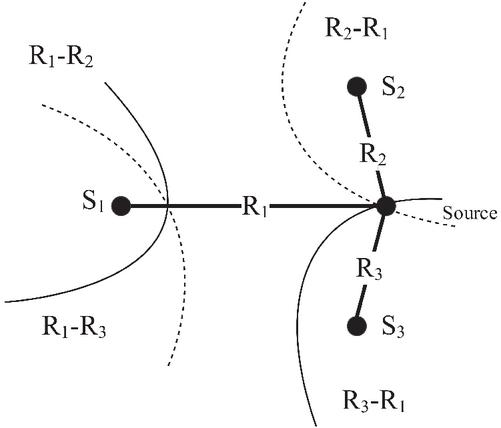
Figure 4 Geometric representation of a TDOA positioning system.
As mentioned in the Time of Arrival technique, both the synchronization and the use of a high precision clock in the communication system are also very important.
(3) Angle of Arrival (AOA)
The desired target location occurs at the intersection of several pairs of angle extension lines, each one formed by the circular radius from the transmitting station to the moving target [16]. In this technique, it is necessary to use a minimum of two known reference points and two measured angles to perform the calculation relative to the location in two dimensions of the target as shown in Figure 5.
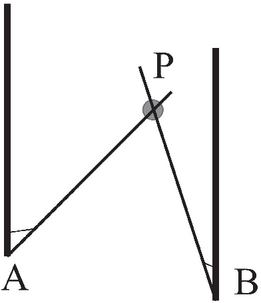
Figure 5 Geometric representation of an AOA positioning system.
As an advantage over the other measurement techniques described above, it can be noted that the position requires only three units of measurement for positioning in three dimensions or two units for positioning in two dimensions [17]. In addition, there is no need to synchronize the units of measure. Instead, you need to use relatively large and complex hardware. The estimate degrades as the mobile moves away from the transmitting stations. Accuracy can also be limited by shadowing, reflections from the signal from unforeseen directions, or the measurement aperture’s direction. The following Time of Arrival (TOA), Time of Arrival Difference (TDOA), Angle of Arrival (AOA) giving presentation position of proposed model with node localization.
2.2 Methods of Localization
There are various indoor localization techniques apart from those to discuss about major techniques which are succsess fully findout location of indoor environments. Those techniques are Dead Reckoning method, Fingerprinting method. In this work, the Dead Reckoning method, some of the various approaches of the Fingerprinting method and the Bayesian method, and finally, some of the fusion methods are studied more in-depth. Different information is derived from different printing techniques is combined. Measurement to get a better location.
(1) Dead Reckoning Method
This type of procedure to detect mobile location has been carried out historically in navigation, for its location from its initial situation, the course and its speed, without using the stars and the sky as a reference. Mobile devices, and particularly smartphones, incorporate low-cost inertial sensors, such as accelerometers, gyroscopes, and magnetometers, which have been seen previously [18]. That is why the study of this location methodology has evolved for its application in this type of device. The interest in obtaining a precise positioning of the same or the person who carries it grows.
Initially, in the first works that were carried out to solve locating a device through the DR, the user was required to carry this device in hand or fixed on the chest to eliminate any type of noise during the procedure. Inertial sensors measurement phase. However, for those applications in which the user is also required to carry the device, these types of requirements become a limitation in practice, since normally the user carries the mobile phone in their pants pocket or other similar places.
Next, it is explained in a more in-depth way how in some studies carried out, the calculation of the detection of the passage is made on the one hand and the direction of the movement on the other. To detect the steps, the accelerometer is used, which indicates the acceleration (in three axes) relative to the device itself. The user’s steps are counted by reading the inertial force, and periodically, series of patterns of the inertial signal is observed on the step events [19]. The strongest indication of the step is located at the maximum peaks of the vertical axis relative to the ground. However, the vertical signal component can be distributed among the three axes of the accelerometer, depending on the orientation and position of the device at the time of capture as shown in Figure 6. This figure is giving more information about peak detection as well as step acceleration modeling, here all GPS node localization is excepting more peak detection.
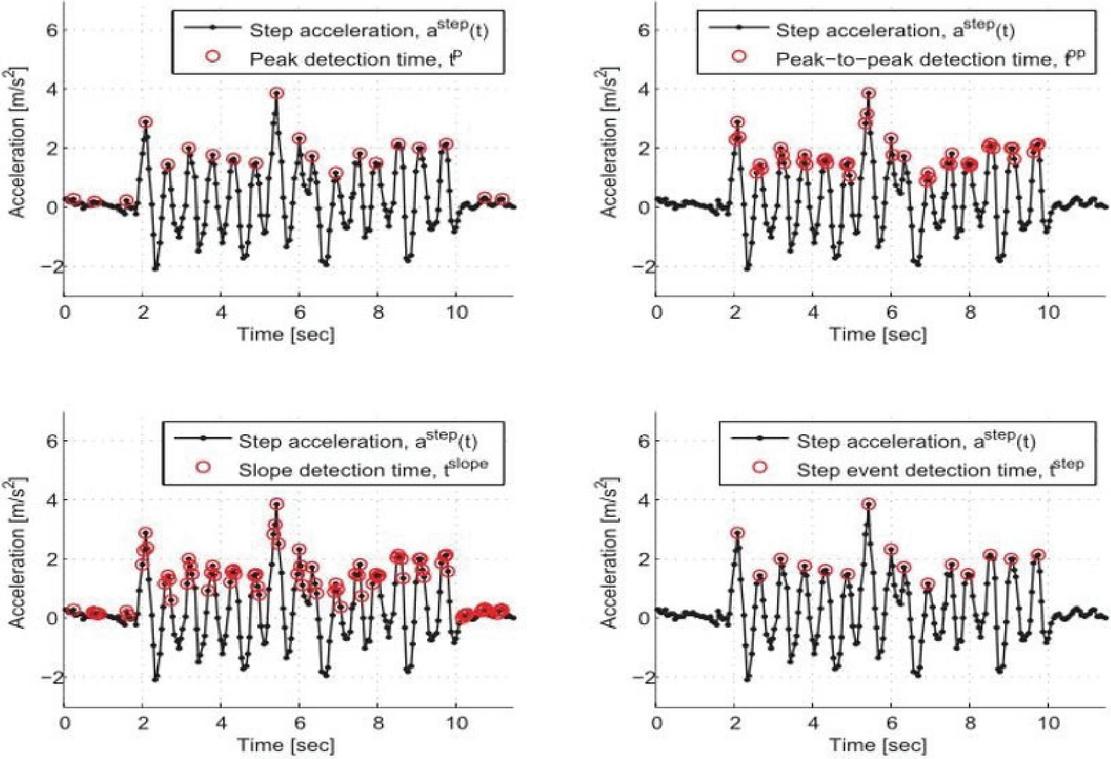
Figure 6 Path detection in a DR-based system.
For calculating the direction of motion, many proposed approaches try to solve this problem. Because inertial sensors are low cost and consider the previous premise that the user generally carries the device in their pocket, the drift relative to movement with the gyroscope can suffer large errors. Also, since indoor environments interfere a lot with the magnetic field, it isn’t easy to calculate the direction of movement based on the magnetometer. The following Figure 7(a), (b) and (c) shows an approach.
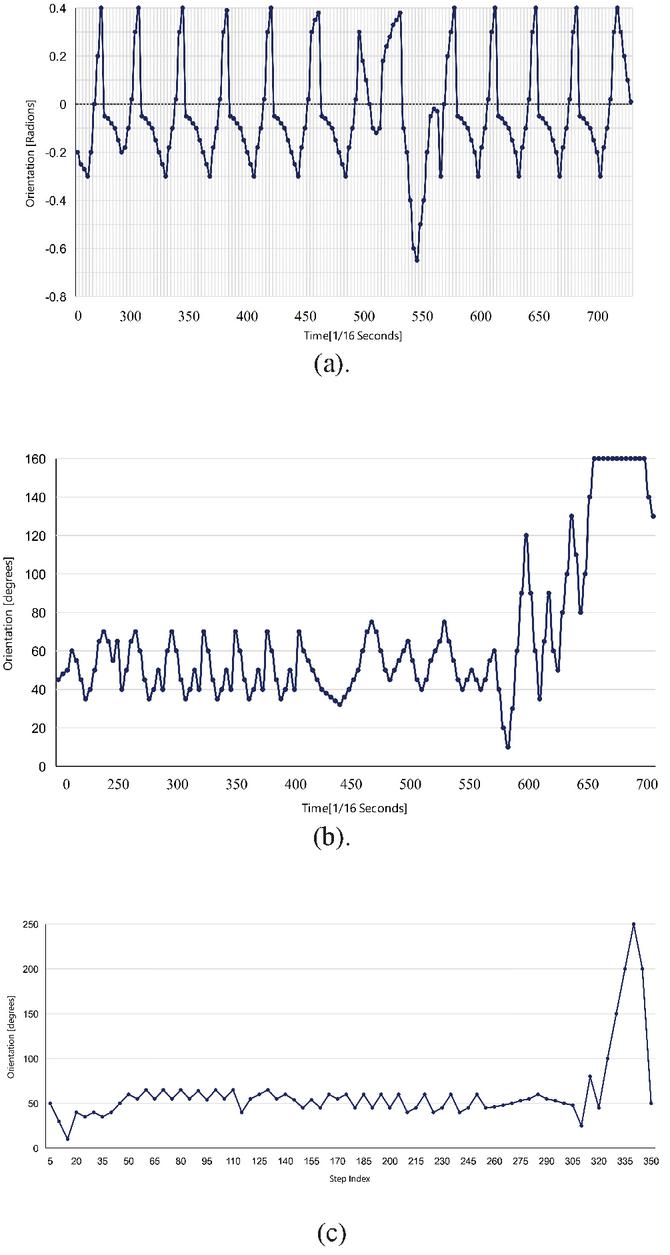
Figure 7 (a). Readings taken from the gyroscope; (b). The magnetometer; (c). The final result.
In the first two figures, it can be seen that the spin only occurs when the measurements of both sensors show large changes. They arrive at the final result by establishing change thresholds, both for the magnetometer and for the gyroscope, to automatically merge both types of results in one time and putting fixed weights. The final result is seen in the last graph of the previous figure.
(2) Fingerprinting Method
Fingerprinting localization methods use measurement techniques related to the received signal’s amplitude (or power) (RSS). This type of measurement can be obtained from different technologies, and therefore, the data with which it is worked can have different origins. Likewise, for this type of measurement, the most commonly applied method to obtain mobile location is Fingerprinting [20]. It is globally one of the most used methods to solve such problems in indoor environments. This is mainly because the type of measurements used in these environments is considered valid values.
The basic Fingerprinting methodology uses radio measurements of the signals received from different transmitting stations to provide a fingerprint of the signal conditions at a specific position. Initially, it is assumed that the transmitting stations are static and that their actual location is known [21]. In addition, normally, the real position is determined by some reference measurement of the same. Thus, a map of the conditions of the radio signal is created to locate the position of a terminal after comparing the real measurements with the conditions reference [22].
The advantages of this type of methodology compared to the rest are the following:
1. No synchronization is necessary between transmitting and receiving stations it is the main advantage.
2. It takes into account multipath effects.
3. No line of sight is necessary.
4. If the environment is not dynamic, a recalibration of the measurements is not necessary.
As for the downsides, here are a few:
1. The Environmental inspection involves high costs in time and labour during the calibration phase.
2. Data may be affected during measurement due to variations in the signal.
3. It is not a robust method for environmental dynamics. In such situations, a recalibration phase is necessary, which again implies costs in time and labour.
4. Possible misalignment between the fingerprint and the actual measured values.
As seen previously, in this type of methodology, a collection of data related to the radio frequency signals is initially carried out, called fingerprints [23]. And then, an estimate of the location of a device is made by comparing the measurements obtained in real-time with those previously collected, as shown in Figure 8 Fingerprinting using RSS.
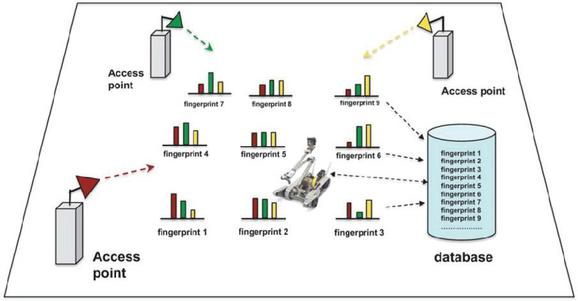
Figure 8 Fingerprinting using RSS measurements of Wi-Fi access points.
Generally, the phase in which measurements are collected to build the reference standard, also called radio-map, is called the calibration phase, the training phase, or the offline phase. In a homologous way, the phase in which the location is determined by comparing the measurements obtained by the device in real-time with the pattern already created is called the location phase, or the online phase as shown in Figure 9.
During the offline phase, when generating the radio map, a minimum number of points must be selected, and in turn, these points must be significant enough to achieve adequate precision.
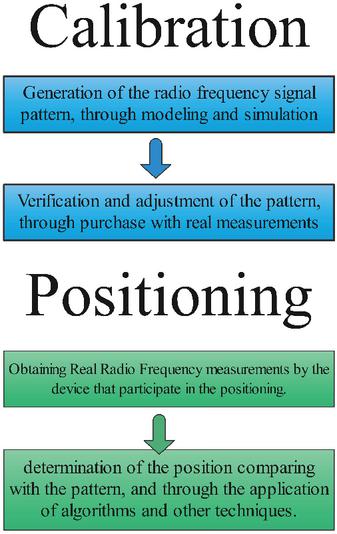
Figure 9 Basic phases of the Fingerprinting methodology.
To choose the positions from which the signals are measured, various techniques can be used, among which the most common is the grating. Employing this technique, space is squared, usually in a two-dimensional way, and a value is obtained for each of the cells whose size has previously been defined. Another consideration that must be taken into account is the height at which the measurements are taken within said space. Concerning the second method to generate the signal pattern, the parameterization method generates the radio-map to reference the parameterization of a propagation method. This second route usually presents two steps: the first simulation step and the second, in which measurements are made directly on the stage to verify and correct the errors caused by the first step.
The online phase is the phase in which the real-time calculation of the device’s position is performed. The location calculation is performed by comparing the radio frequency signal measured by the device with the data stored in the radio map. This part of the process is the lack of coincidence between the value obtained from the device and those stored in the measurement table. Therefore, it is necessary to use techniques and algorithms to perform the pairing and determine the device’s location.
2.3 Localization Technologies
This work is going to focus on the study of the technologies that are currently most used, due to the good results obtained, for indoor location systems: WiFi, Bluetooth and the inertial sensors of Smartphones. The indoor localization is supporting smartphones, Global Positioning System (GPS) navigation, ZigBee protocol, Wi-Fi, etc. these are continually utilizing node localization is positioning and calibration. They will be studied in more detail below.
(1) Wi-Fi
Today, the many existing Wi-Fi (IEEE 802.11) infrastructures, such as routers, are highly available in a large number of commercial and residential buildings, and virtually all mobile devices come equipped with a Wi-Fi receiver. That is why, a priori, it has a low cost, and it is practical to develop an indoor positioning system based on Wi-Fi to provide a localization system in indoor spaces. Some of the works already developed based on this technology achieve meter-level precision in locating the device [24].
The standard that Wi-Fi routers meet has the following transmission characteristics:
1. 802.11/b: it has a maximum transmission speed of 11 Mbits/second operating in the 2.4 GHz band.
2. 802.11/g: it operates in the same band as the previous one, but unlike it, it achieves a maximum transmission speed of 54 Mbits/second.
Due to Wi-Fi availability and the good results obtained, one of the most popular techniques in indoor locating is based on the received signal strength (RSS) of Wi-Fi. On the other hand, one of the drawbacks of Wi-Fi due to the wide variety of signals that exist is that they tend to have large fluctuations. In most cases where Wi-Fi is used as a technology to solve indoor location, the measurement technique applied is RSS, as already mentioned above, and the methodology for localization is usually Fingerprinting. The measurement techniques related to TOA, TDOA and AOA are also used for Wi-Fi technology [25]. The drawback of RSS is that these triangulation techniques have three phases when the RSS technique only has two.
(2) Bluetooth
Bluetooth is a wireless networking standard for personal area networks. It is primarily designed for short-range, low-power consumption operations between various mobile and embedded devices. Since it is a radio frequency-based communication protocol, no line of sight is required between communicating devices. Bluetooth provides connection management and data exchange between nearby devices that do not require broadband data links. Unlike Ethernet-based Wi-Fi networks, Bluetooth devices establish a paired connection with other available devices or services in a paired manner, making this setup process easier.
In recent years, the mobile phone market has been increasing the use of Bluetooth for communication between devices and data exchange [26]. Many computer accessories, including the mouse, keyboard, headphones or printers, also use Bluetooth as the standard for wireless communication as shown in Figure 10 different connection phases.

Figure 10 Connection of different devices via Bluetooth.
As for the particular case of indoor localization with Bluetooth, the most widely used technique is RSS, applying the Fingerprinting methodology, due to the simplicity of the method, despite the number of access points that have to be placed in the environment, as well as the distance that the devices must be found to be able to make a pairing between them.
(3) ZigBee
ZigBee technology is based on the IEEE 802.15.4 standard. It is characterized because its devices have low consumption, a mesh topology and are very easy to manufacture since the electronics present in the devices that use this technology are very simple. At present, we can say that ZigBee is the most appropriate technology, together with Wi-Fi networks, to develop indoor location engines [27]. Its main advantage is its low cost and its low emission power. However, it has a very low bandwidth as its main disadvantage. The wireless area personal networks are getting information from IEEE 802.15.4 model from ZigBee can handling many fundamental networks.
(4) Inertial Measurement Unit (IMU) Sensors
In recent years, inertial navigation systems (INS) have been actively studied for localization. INS are composed of an accelerometer, a gyroscope, and a magnetic compass, which are used to estimate the position and estimate the speed of a mobile device as shown in Figure 11 MEMS based IMU [28].

Figure 11 Miniaturized MEMS component: accelerometer and gyroscope.
Even though INS systems provide information on a precise location quickly, the cumulative error caused by environmental disturbances is too large to be used for a long time. It must be taken into account that a mobile device’s movement can cause large cumulative errors due to the change of speeds, friction, and vibrations of the same. In particular, the inertial sensors related to smartphones that provide relevant information for the location of the device are the accelerometer, gyroscope and magnetometer, which are briefly studied below.
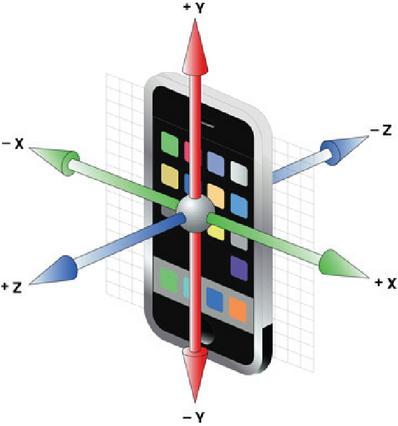
Figure 12 Conceptual graphic of a 3-axis accelerometer.
Accelerometer
The accelerometer detects accelerations or forces in the three axes, which allows two variables to be calculated through the smartphone: on the one hand, the phone’s orientation when it is stationary; and on the other, the movement if it is in motion. It is because there is a force that is always present: the gravitational force [29]. Taking into account where the vector points, the orientation of the device can be inferred as shpwn in Figure 12.
If the device is in motion, the measured acceleration is a composition of the force of gravity and the rotational and linear movements of the device.
Gyroscope
This type of sensor, which is incorporated in the vast majority of Smartphones, does not measure the real orientation but is a miniaturized MEMS component and can only measure angular speeds, such as the speed of rotation, as shown in Figure 13 conceptual graphic of a 3-axis gyroscope in smartphones.
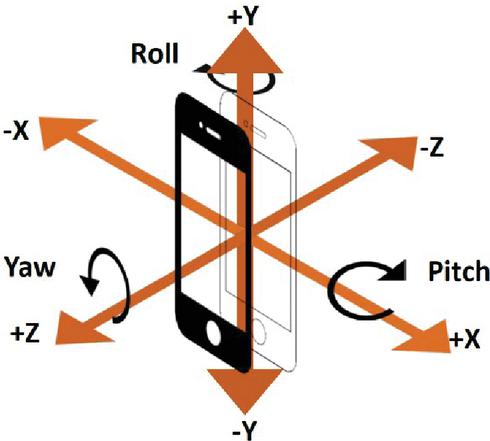
Figure 13 Conceptual graphic of a 3-axis gyroscope.
Magnetometer
The magnetometers built into smartphones are usually three-axis magnetometers, which measure magnetic field strengths. However, if there are no interactions to disturb the sensor, some smart algorithms can calculate the Earth’s magnetic north pole displacement [30].
As with the gyroscope, with the help of other sensors, you can achieve more precise results and with a wide variety of objectives, such as, for example, combining it with a GPS receiver, it helps to determine where you are on a map and in which direction you are looking [31]. The comparison of all Indoor technology’s summary points are mentioned in the Table 1.
Table 1 Summary of some measurement technologies and techniques used in indoor location systems and their precision
| Technology | Measurement Technique | Precision |
| GPS | TDOA | 10–20 m |
| WiFi | RSS | 1–5 m |
| UWM | TOA/TDOA/AOA | 0, 1–1 m |
| Bluetooth | RSS | Connectivity Range |
| INS | IMU | 1–5% of Distance/Angle Displaced |
2.4 Information Fusion Systems
The latest challenges in indoor localization are not exclusively related to the design of specialized sensors for this type of task. Still, they are also aimed at investigating and implementing data fusion methods to exploit all the technologies already in place today.
Below are several jobs are done using various indoor location technologies:
The first of them fuses Wi-Fi technology with various inertial sensors. The main idea is to obtain a pedestrian who carries a mobile device with integrated inertial sensors and a Wi-Fi receiver who is walking through a square-shaped corridor. In each corner of it, a Wi-Fi access point is installed so that the device can detect the signal from any point in the corridor [32]. The final solution is obtained by these two independent technologies that correct each other using particle filter and Kalman filter algorithms.
Wi-Fi measurements are taken using the received signal amplitude technique (RSS), and the Fingerprinting method is used. On the one hand, the particle filter is used to fine-tune the Wi-Fi Fingerprinting approach, while the Dead Reckoning is applied to achieve the particle movement function as shown in Figure 14.
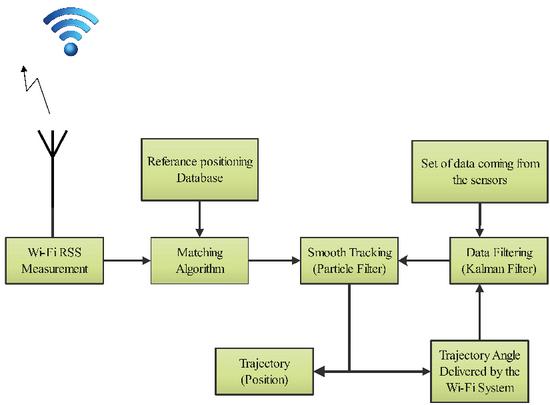
Figure 14 Architecture of the mutual correction system.
The data obtained from the inertial sensors are the direction in which the pedestrian is walking, which is obtained through the gyroscope data; the walking distance, also obtained by the mobile’s accelerometer; To locate the device on a three-dimensional plane, the barometer is used, which through pressure identifies when the pedestrian goes up or downstairs as shown in Figure 15.
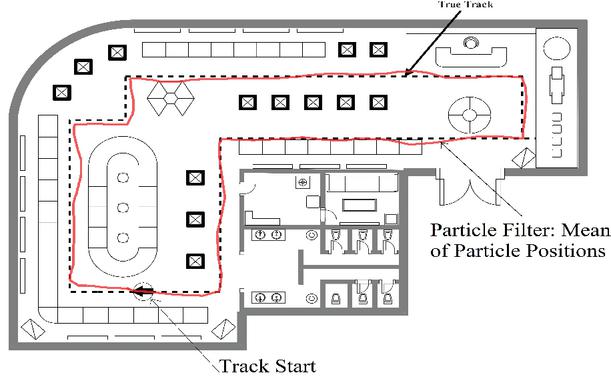
Figure 15 Results merging the inertial sensors and the indoor map, and the inertial sensors, the map and the WLAN data, respectively.
From these data obtained from the sensors, the Kalman filter is used to compensate for the spin obtained, using the trajectory of the Wi-Fi Fingerprinting method. The absolute precision of the system obtained in the experiments is 1.53 meters. Another proposed work uses inertial sensors, indoor maps, and WLAN networks through particle filters. The data obtained from the gyroscope is used to obtain the direction of the road and the three-axis accelerometer to detect each step. A study is also carried out on the relationship between the length of the step and its frequency to estimate the length of the steps.
As for the location based on the WLAN network, use is made of the Fingerprinting technique. On the other hand, to reduce the computational load of the entire system, a method of grouping obstacles is proposed for the interior map. The results obtained can be seen in Figure 16 for the two cases in which the system’s information is merged. In both cases, the precision obtained is higher than in cases where fusion is not used, where errors of 4 to 12 meters are obtained, compared to 2 and 3 meters of error. A work similar to the previous one, in which a fusion of the data obtained from the accelerometer, WLAN signals and map information is proposed to obtain the pedestrian’s path.
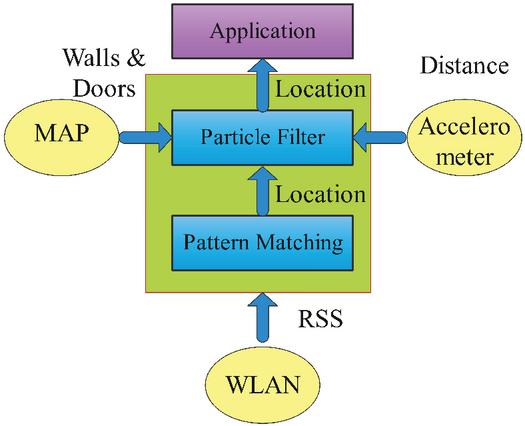
Figure 16 Scheme of the system structure.
Fingerprinting technique is applied for WLAN-based location, which is treated as a benchmark for comparison. Concerning the Dead Reckoning approach, the path length is estimated from an empirical equation. According to the authors, the algorithm’s behaviour is not sensitive to the precision of the path length estimation [33]. The direction of the path is sampled from a uniform distribution. Finally, a particle filter is applied to melt the sensor as shown in Figure 16.
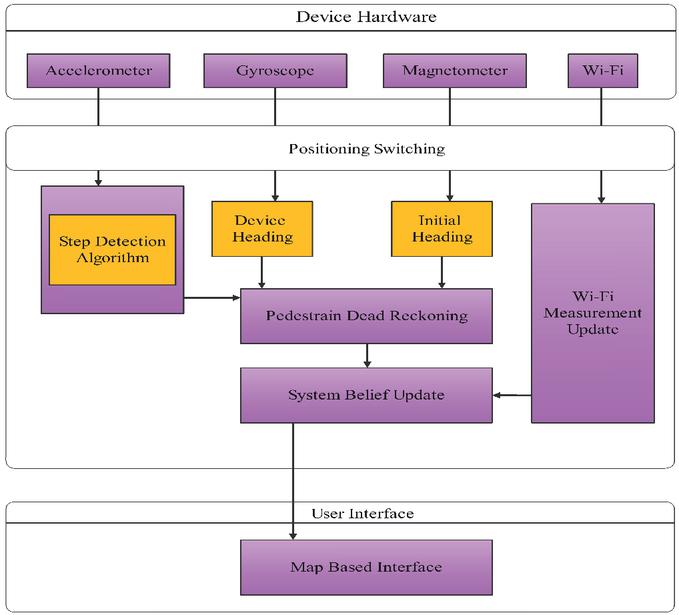
Figure 17 Block diagram of the proposed system.
The experiments have been carried out under two contrasting environments. The results show that their system outperforms other approaches based exclusively on Wi-Fi and requires less training and maintenance costs. In addition, the proposed system works in environments with poor Wi-Fi signal as shown in Figure 17.
3 Proposal
After reviewing state-of-the-art art related to an indoor location, an architecture is proposed for the fusion of information that allows taking advantage of the use and mixing of different types of location technologies. This architecture, which is proposed based on the conclusions obtained after the review of state of art, is divided into three large layers differentiated according to the level of fusion of the information to be treated, as shown in the following Figure 18.
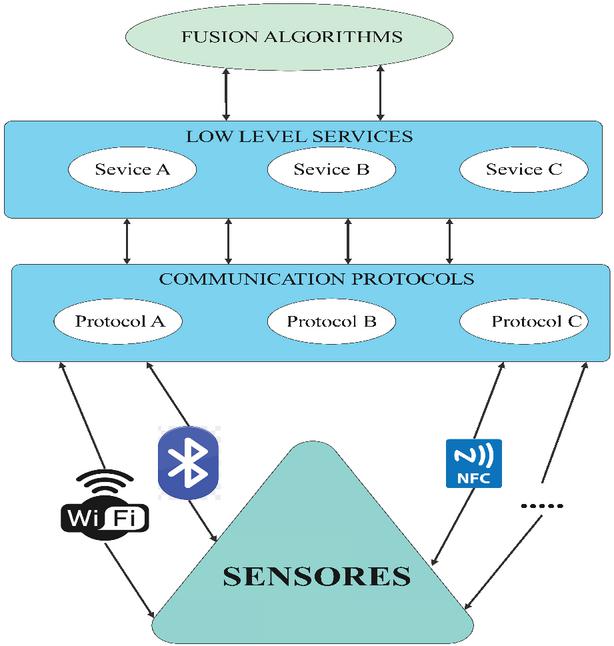
Figure 18 Proposed architecture for information fusion.
In a general way, the proposed architecture aims to provide a frame of reference to deal with the relative information of the different types of sensors that can intervene in an indoor location process, as has been studied throughout the section. Review of the state of the art of this article. The final objective is to obtain data that can be processed by an information fusion algorithm that provides a final result in a more precise way than would be achieved by doing the same work individually, with a single source of information.
More specifically, the architecture that is proposed as a reference would be composed of the following layers:
1. At the first level, the different types of sensors in the environment would be located, dedicated to detecting each instrumentation variable and transforming them into electrical variables to treat them of the system.
2. In the lowest level layer of the architecture, the layer related to communication protocols, the controllers or drivers would be located, which are in charge of communicating on the one hand with the system and on the other with the different sensors. It is the layer that acts as an interface between the lowest level and the services layer. This layer is proposed since it has been observed that location technologies are classified at the communication protocol level.
3. The layer related to low-level services would be in charge of processing the data captured by the controllers of the different devices and transforming them into information. Said information might be used by the next layer relative to the fusion algorithms, providing information services so that the high-level fusion algorithms can use them.
4. The last layer, the highest level, would be the one that would be in charge of merging the information already treated in the previous layer in such a way so that it can be understood by the algorithm used in each case.
Thus, an architecture is created in which layer by layer the different types of information from different sources are treated, such as a Bluetooth receiver, or the inertial sensors of next-generation mobile, to reach a final result in which different types of information are merged, and that, obtains more precise results regarding the location of a device at a certain time. What is achieved with this proposal is to conceptually design and structure a system of fusion of information from different types of information sources that are innovative, since in the review of state of art it has been observed that there are no architectures of these characteristics, with dynamic learning and adaptation capabilities. Thus, depending on the type of sensor used in each case, the communication protocol and the services for processing the information would be different in each case.
4 Results and Discussions
As results of the work carried out, a series of recommendations have been obtained that are synthesized in tables related to the different points that have been studied throughout the article, analyzing both the advantages and disadvantages of each of them, as well as the relationship and use that it has with the rest of the points within the set of the indoor location. Near filed communication model communicating back-to-back with android stream. The NFC is correctly utilized by different apps like android, iOS and different OS’s. The GPS is blocking or unusual signals from different rooms in network.
As can be seen in Table 2, it is worth highlighting the wide use that is given to the Fingerprinting localization method since it is the one that is mostly applied with the TOA, TDOA, AOA and RSS techniques. In these indoor measurements are concentrating on locations of users with accurate signal information. On the other hand, inertial measurement units are usually linked to the Dead Reckoning method, which is widely used for the location using the smartphone and its inertial sensors. Regarding TOA, TDOA and AOA techniques, they have the disadvantage of having three phases. In contrast, RSS has two, and, on the other hand, the importance of synchronization in TOA and TDOA techniques makes the difference concerning measurement employing AOA. About the use of techniques, the power of the received signal is the one that is currently used the most to solve the problem of indoor location.
Table 2 Comparison of various indoor measurement techniques
| Technique | Advantage | Disadvantage | Applications |
| TOA |
1. Correction of errors |
1. Synchronization 2. Clock Accuracy 3. Three Sensors Required 4. Known Distance between Sensors 5. Three Phases |
Use With Fingerprinting Method |
| TDOA |
1. Works without Direct vision signal. |
||
| AOA |
1. No sync 2. Two sensors required. |
1. Use of HW Complex 2. Estimation degradation 3. Multipath reflections 4. Connectivity Range 5. Three Phases |
|
| RSS |
1. High Availability 2. No sync 3. Diversity of data sources. |
1. Bad precision in environments 2. Three Sensors Required 3. Two Phases |
|
| IMU |
1. High Availability 2. Modeling the errors. |
1. Cumulative Errors. |
1. Smart phones 2. Dead Reckoning |
Regarding the localization methods, the Dead Reckoning is notable for its simplicity and, in contrast, the errors due to movement. The Fingerprinting method is the most used in an indoor location and Wi-Fi technology, which is why it has such high availability, but as a drawback, the previous training that has to be done stands out, the comparison of various indoor localization methods in Table 3. This explanation can improve the indoor localization with IMU, RSS, AOA TDOA and TOA techniques. The applications are continually providing multipath, connectivity range and eliminating errors with node sensor unit with localization techniques.
Table 3 Comparison of various indoor localization methods
| Technique | Advantage | Disadvantage | Applications |
| D.Reckoning |
• Simplicity • Divercity of caliculation. |
• Fixed Device • Errors due to movement |
• Step Detection • Direction of movement |
| Fingerprinting |
• Valid Results • High Availability |
• Pre-training Phase • Inspection of the environment • Caliculation of the Number of Measurements |
• The most used in Indoor Localiation • Used with Wi-Fi Technology Mostly |
| Bayesians |
• Operates based on Uncertainty |
• High Cost • Complexity |
• Use with different measurement techniques |
Table 4 Comparison of various indoor localization technologies
| Technique | Advantage | Disadvantage | Applications |
| WiFi |
• High Availability • Low Cost |
• Large Flactuations |
• RSS and Fingerprinting |
| Bluetooth |
• No Line of Sight necessary • Simple Connection |
• Short Range • Low Consumption Operations • High Number of Points of Access |
• Use with different measurement techniques. |
| ZigBee |
• Low consumption • Low Cost • Low Emission Power |
• Reduced Bandwidth |
• Use with different measurement techniques |
| INS |
• Low Cost • High Availability • High Speed |
• Cumulative Error |
• Estimation of Position and Speed • IMU and D.Reckoning |
Wi-Fi, Bluetooth and ZigBee technologies usually use the measurement of received power signals and the Fingerprinting method. On the other hand, inertial sensors usually use Dead Reckoning and inertial measurement units. It should be noted as advantages and disadvantages, the high availability of Wi-Fi, and its tendency to fluctuate due to the wide variety of signals that exist. With Bluetooth, you don’t need a direct line of sight, but to set up a localization, many access points are needed. ZigBee technology has low emission power, low consumption and cost, but low bandwidth. And finally, inertial sensors have high availability and low cost, but the mobile movement can cause large cumulative errors due to changes in speed, friction and vibration. All indoor localization technologies is mentioned in Table 4. This explanation is giving limitations, applications and advantages of node localization of techniques. The RAA fingerprinting with wifi and estimation of user position with INS can providing communication as well as position.
5 Conclusion
Localization in indoor environments is gaining in importance in recent years due to the rise of location-based services. The documentation and the study carried out to date in this regard are very broad and varied. Due to this, not all experts classify or structure their ideas in the same way. That is why it has been considered appropriate in this article to review state of art and propose a structure that allows analysing existing proposals. There are many measurement techniques used in indoor location environments and methodologies and technologies with which successful results are obtained. Throughout this work, data has been provided about those considered most relevant, either because of the good results they provide, because of the high use that they are given or because of the future projection they may have. Currently, there is a clear trend towards using received signal power measurement systems using a Fingerprinting methodology with Wi-Fi technology. This is due largely to the high availability of Wi-Fi technology in commercial and residential environments and the integration of receivers in mobile devices. The good results obtained using these techniques with the technology, as mentioned earlier. At the same time, one of the systems that arouses the most interest is that based on inertial measurement units, the smartphone’s role acquires great relevance, once again. However, the most accurate results and the latest localization challenges are directed towards merging different sources of information. The work carried out in this area is mainly based on filter methodologies Bayesians since they are very powerful statistical tools. The use of very heterogeneous data sources is possible. Regarding the proposed architecture, it is presented at an abstract level. It does not delve into the detailed structure of each of the layers. Still, it is considered that it complies with a conceptual and structural design related to an information fusion system and provides new insight into indoor location systems. The architecture allows working with heterogeneous data that can be taken from different types of sensors, regardless of their origin. It provides a service-based conception that allows the user to easily and transparently configure different techniques and algorithms for merging information in environments. The existed models are getting less improvement like accuracy, sensitivity and Recall adjustments. The novel methodology providing efficient outcomes like sensitivity 98.34%, accuracy 97.89%, Recall 96.78% and F measure 96.73%.
References
[1] Y. Hlaing and N. A. M. Maung, “An enhanced time-based wireless indoor localization using synchronized TDoA technique,” in 2019 16th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology (ECTI-CON), 2019, pp. 693–696.
[2] I. E. Radoi, D. Cirimpei, and V. Radu, “Localization systems repository: A platform for open-source localization systems and datasets,” in 2019 International Conference on Indoor Positioning and Indoor Navigation (IPIN), 2019, pp. 1–8.
[3] R. C. Luo and T.-J. Hsiao, “Indoor localization system based on hybrid Wi-Fi/BLE and hierarchical topological fingerprinting approach,” IEEE Trans. Veh. Technol., vol. 68, no. 11, pp. 10791–10806, 2019.
[4] U. M. Qureshi, Z. Umair, and G. P. Hancke, “Indoor localization using wireless fidelity (WiFi) and bluetooth low energy (BLE) signals,” in 2019 IEEE 28th International Symposium on Industrial Electronics (ISIE), 2019, pp. 2232–2237.
[5] P. Kanakaraja, K. Sarat K, and L. S. P. S. Nadipalli, “IoT Enabled BLE and LoRa Based Indoor Localization without GPS,” Turkish J. Physiother. Rehabil., vol. 32, no. 2, pp. 642–653, 2021, [Online]. Available: https://turkjphysiotherrehabil.org/pub/pdf/322/32-2-82.pdf.
[6] A. Sato, M. Nakajima, and N. Kohtake, “Rapid BLE beacon localization with range-only EKF-SLAM using beacon interval constraint,” in 2019 International Conference on Indoor Positioning and Indoor Navigation (IPIN), 2019, pp. 1–8.
[7] P. Kanakaraja, S. K. Kotamraju, L. S. P. S. Nadipalli, S. V. A. Kumer, and K. C. Sri Kavya, “Localization Algorithms and Approaches for Navigation in Advanced IoT Applications BT - Proceedings of International Conference on Communication and Artificial Intelligence,” 2021, pp. 259–269.
[8] P. Kanakaraja, S. K. Kotamraju, L. S. P. S. Nadipalli, S. V. A. Kumer, and K. C. Sri Kavya, “Indoor and Outdoor Localization Methods for Advanced Navigation Systems BT – Proceedings of International Conference on Communication and Artificial Intelligence,” in Proceedings of International Conference on Communication and Artificial Intelligence: ICCAI 2020, 2021, pp. 247–257.
[9] F. Zafari, A. Gkelias, and K. K. Leung, “A Survey of Indoor Localization Systems and Technologies,” IEEE Commun. Surv. Tutorials, 2019, doi: 10.1109/COMST.2019.2911558.
[10] N. Dinh-Van, F. Nashashibi, N. Thanh-Huong, and E. Castelli, “Indoor Intelligent Vehicle localization using WiFi received signal strength indicator,” in 2017 IEEE MTT-S international conference on microwaves for intelligent mobility (ICMIM), 2017, pp. 33–36.
[11] M. G. Jadidi, M. Patel, J. V. Miro, G. Dissanayake, J. Biehl, and A. Girgensohn, “A radio-inertial localization and tracking system with BLE beacons prior maps,” in 2018 International Conference on Indoor Positioning and Indoor Navigation (IPIN), 2018, pp. 206–212.
[12] B. Choi, K. La, and S. Lee, “UWB TDOA/TOA measurement system with wireless time synchronization and simultaneous tag and anchor positioning,” in 2018 IEEE International Conference on Computational Intelligence and Virtual Environments for Measurement Systems and Applications (CIVEMSA), 2018, pp. 1–6.
[13] G. Y. Ha, S. B. Seo, H. S. Oh, and W. S. Jeon, “LoRa ToA-Based Localization Using Fingerprint Method,” in 2019 International Conference on Information and Communication Technology Convergence (ICTC), 2019, pp. 349–353.
[14] A. Chugunov, N. Petukhov, and R. Kulikov, “ToA Positioning Algorithm for TDoA System Architecture,” in 2020 International Russian Automation Conference (RusAutoCon), 2020, pp. 871–876.
[15] I. Sobron, I. Landa, I. Eizmendi, and M. Velez, “Adaptive TOA Estimation with Imperfect LOS and NLOS Knowledge in UWB Positioning Systems,” in 2020 IEEE Sensors, 2020, pp. 1–4.
[16] Q. Wang, Z. Duan, and X. R. Li, “Source Localization with AOA-Only and Hybrid RSS/AOA Measurements via Semidefinite Programming,” in 2020 IEEE 23rd International Conference on Information Fusion (FUSION), 2020, pp. 1–8.
[17] Y. Zheng, M. Sheng, J. Liu, and J. Li, “Exploiting AoA estimation accuracy for indoor localization: A weighted AoA-based approach,” IEEE Wirel. Commun. Lett., vol. 8, no. 1, pp. 65–68, 2018.
[18] Y. Han, C. Wei, T. Lu, and R. Wang, “A Multi-platform Cooperative Localization Method Based on Dead Reckoning and Particle Filtering,” in 2019 Chinese Control Conference (CCC), 2019, pp. 4037–4041.
[19] Y. Sakuma and M. Fujii, “A study on direction estimation of movement by multiple sensors for pedestrian dead-reckoning,” in 2017 Fifth International Symposium on Computing and Networking (CANDAR), 2017, pp. 603–605.
[20] N. A. M. Maung, B. Y. Lwi, and S. Thida, “An Enhanced RSS Fingerprinting-based Wireless Indoor Positioning using Random Forest Classifier,” in 2020 International Conference on Advanced Information Technologies (ICAIT), 2020, pp. 59–63.
[21] N. A. M. Maung and W. Zaw, “Comparative Study of RSS-based Indoor Positioning Techniques on Two Different Wi-Fi Frequency Bands,” in 2020 17th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology (ECTI-CON), 2020, pp. 185–188.
[22] R. H. Jaafar and S. S. Saab, “A neural network approach for indoor fingerprinting-based localization,” in 2018 9th IEEE Annual Ubiquitous Computing, Electronics & Mobile Communication Conference (UEMCON), 2018, pp. 537–542.
[23] Y. Duan et al., “Data rate fingerprinting: A WLAN-based indoor positioning technique for passive localization,” IEEE Sens. J., vol. 19, no. 15, pp. 6517–6529, 2019.
[24] S. Jeong, H. Lee, T. Kang, and J. Seo, “RSS-based LTE Base Station Localization Using Single Receiver in Environment with Unknown Path-Loss Exponent,” in 2020 International Conference on Information and Communication Technology Convergence (ICTC), 2020, pp. 958–961.
[25] X. Yan, Q. Luo, Y. Yang, S. Liu, H. Li, and C. Hu, “ITL-MEPOSA: improved trilateration localization with minimum uncertainty propagation and optimized selection of anchor nodes for wireless sensor networks,” IEEE Access, vol. 7, pp. 53136–53146, 2019.
[26] C. Du, B. Peng, Z. Zhang, W. Xue, and M. Guan, “KF-KNN: Low-Cost and High-Accurate FM-Based Indoor Localization Model via Fingerprint Technology,” IEEE Access, vol. 8, pp. 197523–197531, 2020.
[27] C. Laoudias, A. Moreira, S. Kim, S. Lee, L. Wirola, and C. Fischione, “A survey of enabling technologies for network localization, tracking, and navigation,” IEEE Commun. Surv. Tutorials, vol. 20, no. 4, pp. 3607–3644, 2018.
[28] D. R.-Y. Phang, W.-K. Lee, N. Matsuhira, and P. Michail, “Enhanced Mobile Robot Localization with Lidar and IMU Sensor,” in 2019 IEEE International Meeting for Future of Electron Devices, Kansai (IMFEDK), 2019, pp. 71–72.
[29] C. Xu, J. He, Y. Li, X. Zhang, X. Zhou, and S. Duan, “Optimal estimation and fundamental limits for target localization using IMU/TOA fusion method,” IEEE Access, vol. 7, pp. 28124–28136, 2019.
[30] Z. Xia and S. Tang, “Robust self-localization system based on multi-sensor information fusion in city environments,” in 2019 International Conference on Information Technology and Computer Application (ITCA), 2019, pp. 14–18.
[31] H. Sadruddin, A. Mahmoud, and M. M. Atia, “Enhancing Body-Mounted LiDAR SLAM using an IMU-based Pedestrian Dead Reckoning (PDR) Model,” in 2020 IEEE 63rd International Midwest Symposium on Circuits and Systems (MWSCAS), 2020, pp. 901–904.
[32] W. You, F. Li, L. Liao, and M. Huang, “Data fusion of UWB and IMU based on unscented Kalman filter for indoor localization of Quadrotor UAV,” IEEE Access, vol. 8, pp. 64971–64981, 2020.
[33] H. A. Hashim and A. E. E. Eltoukhy, “Landmark and IMU Data Fusion: Systematic Convergence Geometric Nonlinear Observer for SLAM and Velocity Bias,” IEEE Trans. Intell. Transp. Syst., 2020.
Biographies

P. Kanakaraja is working in Department of Electronics and Communication Engineering, Koneru Lakshmaiah Education Foundation, Vaddeswaram, Andhra Pradesh, India. His research area is medical images and GPS node localization techniques had 22 Scopus publications.
Scopus id: https://www.scopus.com/authid/detail.uri?authorId=57209467515

Sarat K. Kotamraju, Professor, Department of Electronics and Communication Engineering, Koneru Lakshmaiah Education Foundation, Vaddeswaram, Andhra Pradesh, India. His research area is wireless communication and thermal image processing. He has 85 Scopus publications in various wireless and medical image applications.
Scopus id https://www.scopus.com/authid/detail.uri?authorId=57205265691

K. Ch Sri Kavya, Professor, Department of Electronics and Communication Engineering, Koneru Lakshmaiah Education Foundation, Vaddeswaram, Andhra Pradesh, India. She has 74 Scopus publications and her research area is micro wave applications, IoT, MEMS applications.
Scopus id: https://www.scopus.com/authid/detail.uri?authorId=57220043625
Journal of Mobile Multimedia, Vol. 18_4, 1099–1130.
doi: 10.13052/jmm1550-4646.1847
© 2022 River Publishers