From QoS to QoE plus QoT in Beyond 5G Networks
Maradona C. Gatara* and Mjumo Mzyece
Wits Business School (WBS), Management Campus, University of the Witwatersrand (Wits), Johannesburg, South Africa
E-mail: maradona.gatara@wits.ac.za; mjumo.mzyece@wits.ac.za
*Corresponding Author
Received 10 March 2022; Accepted 31 May 2022; Publication 15 September 2022
Abstract
In the Beyond 5G (B5G) era, a paradigm shift from technical Quality of Service (QoS) oriented networks to user-centric Quality of Experience (QoE) centred network architectures is expected to occur. With this development, the infusion of QoE user requirements into B5G networks will be critical to the emergence of ultra-reliable and ultra-low latency haptic-enabled Internet applications of the future. One such application which will signify the emergence of a tele-haptic Internet will be the mission-critical use case of remote robotic surgical task performance, precipitating a transition from content-based to skillset delivery networks for an augmented user experience. In extending network QoS to user focused QoE and with it, Quality of Task (QoT) dimensions, human users in a global control loop (such as robotic surgeons) will be capable of true-to-life immersive remote task performance through the manipulation of objects in real-time and across large geographical distances. In this paper, we discuss the linkages between network and user-centric QoS and QoE (with QoT) perspectives. Further, we explain the emergence of a future B5G network and haptic-enabled Internet of Skills (IoS), and draw on the example of an architecture applied to the task-sensitive mission-critical use case of tele-haptic surgery. In doing so, we conceptualise and present Task-Technology Fit (TTF) theoretical and predictive modelling that can be empirically applied to this futuristic use case for a novel QoE/QoT perspective of future B5G communication networks.
Keywords: Beyond 5G (B5G), quality of service (QoS), quality of experience (QoE), quality of task (QoT), haptic-enabled internet of skills (IoS), remote-robotic surgery applications, human-in-the-loop (HITL), task-technology fit (TTF) modelling.
1 Introduction
The emergence of Beyond 5G (B5G) networks including 6G [1] and quantum communications [2] are promising. However, the realisation of an immersive real-time user experience continues to elude researchers and practitioners alike. These future digital networks will evolve past the limitations of currently implemented 5G network technologies [3]. In light of this, the design goals of successive networks are currently being explored. This will be particularly important for the emergence of future architectures. At its very inception, the original Internet was envisioned as a global network of computers, marking a revolutionary shift in economies of the 20th century. This was followed by the Mobile Internet revolution, which connected billions of mobile devices and computers, disrupting entire economic sectors in the 21st century [4]. Today, the Internet of Things (IoTs), projected to link trillions of smart devices and set to redefine economies of the next decade, has emerged. However, these Internets will be superseded by the advent of a Haptic Internet through which it will be possible for secure and highly sensitive networks to support the rendering of true-to-life haptic sensations remotely. This would enhance the capacities of the IoT by introducing a novel dimension to human-machine interaction through immersive real-time communications technologies that will be developed [5]. In the Internets of the future, haptic sensations will assume dual characteristics. The real-time transmission of touch and actuation will extend the conventional audio-visual feedback of current systems through the support of both tactile (cutaneous) and kinaesthetic feedback typologies. First, tactile (cutaneous) feedback would render data on surface, texture, and friction dimensions. Second, kinaesthetic feedback would render data on force, torque, position, and velocity dimensions. Through these modalities, human users would be connected to remote environments in a more immersive way. The senses of sight and sound supported by audio and visual feedback and the rendering of haptic modalities will be bi-directional. As such, touch would be detected by effecting motion on an environment with feeling effected through a reactionary or distortion force. Haptics will become increasingly instrumental to Internet architectures of the future with the advent of the B5G era in communications. The emergence of a haptic-enabled Internet will extend traditional Quality of Service (QoS) performance-related indicators, precipitating a shift to the more human-user centred Quality of Experience (QoE) and Quality of Task (QoT) dimensions.
2 The Shift From Quality of Experience (QoE) and Quality of Task (QoT) Centred Architectures for the Human-in-the-Loop (HITL)
Over time, there has been an over-reliance on Quality of Service (QoS) as a measure of overall network system-related performance. However, this has occasioned a limited focus only on the technical aspects of network performance. As we progress towards B5G networks, an evolution towards more user-oriented metrics of performance will become increasingly necessary [6]. Essentially, B5G requirements will be informed by a gradual shift from system to user-centred architectures [7]. Against this backdrop, there has been an increased effort to infuse Quality of Experience (QoE) dimensions into B5G ecosystems in the future, thereby lending credence to network design focused on the user at its core. In essence, user behaviour must be mapped onto technical network QoS-focused specifications [8]. When a given QoE threshold is attained by the human user, the maintenance of consistent levels of user experience with the technology becomes critical. QoE is considered a non-linear counterpart to the more traditional QoS, such that QoS-specific network-related performance will not necessarily guarantee the optimisation of QoE. Hence, the linkage between QoS parameters and QoE characteristics may be curvilinear in nature. QoE must be devised as a measure of user experience and satisfaction levels linked to application and service technologies. Therefore, the usefulness of perceived user characteristics in given task-specific network domains must be considered for inclusion. Besides the technical, more objective measurement dimensions of QoS concepts, user-determined perspectives such as usability will directly impact user experience and satisfaction, leading to the formation of more user-oriented QoE. QoE not only extends QoS in accounting for observed technology performance, but also addresses what end-users can do with given systems or tools, what their expectations are, and to what extent the technologies they use meet their specific task requirements. Hence products or services that are difficult to utilise will be assessed as having a low QoE threshold, which may hamper their user adoption. This is irrespective of whether the technology is highly advanced from a QoS perspective. Thus, it will become incumbent upon designers of future Internet architectures to ensure that networks which enable ultra-reliable and ultra-low latency communications provide the QoS necessary for the sustenance of optimal user QoE. A persistent challenge in developing B5G networks will be the reliable and consistent transmission of low-latency signals with commensurate user-QoE levels. In future B5G networks, it will be prudent for performance-related measures to infuse QoE with QoS dimensions. With the improvement of ultra-reliable and ultra-low latency network and haptic-enabled future Internet architectures, the extension of QoE to Quality of Task (QoT) dimensions is necessitated. This extension of QoE denotes the precision with which a user can perform a given task using supplied technological support functions, owing to the emergent task-dependent nature that will come to characterise the more user-focused B5G network and haptic-enabled Internet architectures of the future. Of note, QoT can augment the inter-linkages between QoS and QoE.
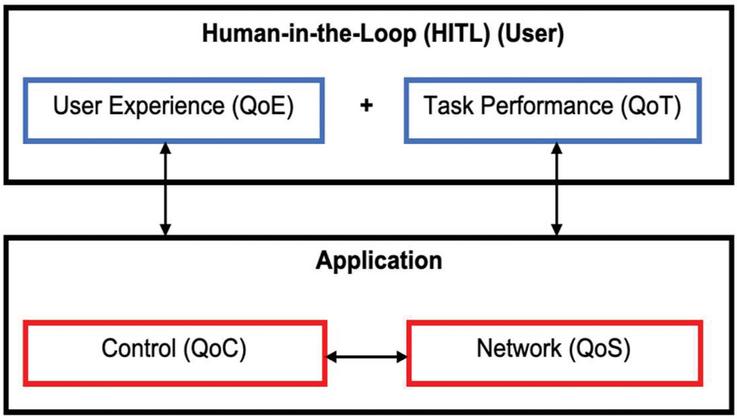
Figure 1 Performance-related dimensions for the evaluation of interlinked quality of experience with quality of task (QoE QoT) and quality of control (QoC) with quality of service (QoS) measures.
A fourth emergent perspective, Quality of Control (QoC) linked to QoS, must also be considered in the design of B5G networks of the future. QoC, which would serve as an extension of human user requirements, will, however, be more applicable to the use of applications where immersive perception is demanded (such as live localisation and mapping systems) [9]. A visual schematic of the link between QoS, QoC, QoE, and QoT dimensions which will all play an integral role in the design of future user-centric future Internet use cases, is shown in Figure 1. In the next section, we propose the architecture of a 5G network and haptic-enabled Internet of Skills (IoS) for the mission-critical real-world use case of remote robotic surgery (tele-haptic surgical task performance), expected to increasingly become relevant with the emergence of B5G network technologies.
3 The Use Case of Remote Robotic Surgery (Tele-Haptic Surgical Task Performance) Applications
The real-time immersive performance of tele-haptic robotic surgery tasks is a mission-critical use case that will leverage the ultra-reliable ultra-low latency requirements that are expected of B5G networks of the future. To envisage the link between QoS, QoT, and QoE components of a haptic-enabled IoS architecture, we propose the following use case as illustrated in Figure 2.
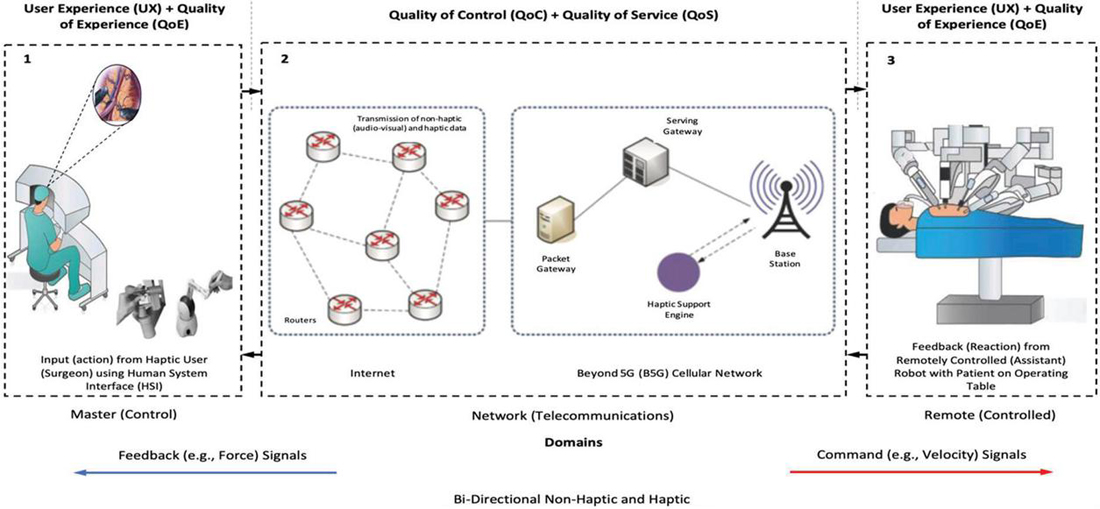
Figure 2 Performance-related dimensions for the evaluation of interlinked quality of experience with quality of task (QoE QoT) and quality of control (QoC) with quality of service (QoS) measures.
For a surgical expert user as the Human-in-the-Loop (HITL) to perform tele-haptic surgery tasks, a master (control) and assistant surgical robot in a remote (controlled) environment must be linked via a reliable high-speed communication network to relay real-time control commands and multi-modal sensory information. Tele-haptic surgical task performance would demand a high-degree of precision in manipulation. As such, there would be more stringent latency, jitter, and packet loss requirements that would need to be supported. As such, emergent B5G networks will be expected to more reliably and consistently ensure the ultra-low latency and ultra-reliable characteristics necessary for seamless bi-directional haptic feedback. This would mean that in a future Internet, surgeons will be equipped to transmit their physical skillsets over remote geographical distances via a B5G-supported telecommunications network. As a result, existing shortages of surgeons, high-quality surgical care, and long-distance travel limitations would be overcome. In addition, enhanced patient safety and precision in surgery will be ensured. In the next section, we discuss the novel approach of Task-Technology Fit (TTF) modelling for the use case of remote robotic (tele-haptic) surgery. This brings into focus the user as a HITL at the epicentre of a haptic-enabled Internet. The HITL is the link between the master (control) and remote (controlled) domains whereby this user and task performer will control and manipulate physical objects to perform a set of specific tasks remotely. If a particular task requirement were to be specified, the actions of the performing human user would result in alterations to position, transmitted from the remote (controlled) environment in the form of force feedback data. This data would then influence the manoeuvres and as a result, positioning, of the task performer. The haptic-enabled Internet would thus form a global closed control loop with forward and backward linkages that represents a confluence of haptics, 5G and B5G networks, Artificial Intelligence (AI) for the perception of zero-delay, and robotics, thereby augmenting the human user experience supporting immersive task performance through the control and precise movement of technology tools in remote environments. This will be synonymous with future emerging B5G networks that will precipitate a shift from traditional communication channels that were content delivery-focused, to task-centric networks for the delivery of skillsets across a number of industry vertical use cases.
4 Task-Technology Fit (TTF) Theory and Predictive Modelling for Remote Robotic Surgery with Proposed Methodology
The concept of Task-Technology Fit (TTF) denotes the measurement of the degree to which the functional capacity of a tool or system is adequate for user needs or requirements [10]. A TTF model of a haptic-enabled IoS is proposed and illustrated in Figure 3.
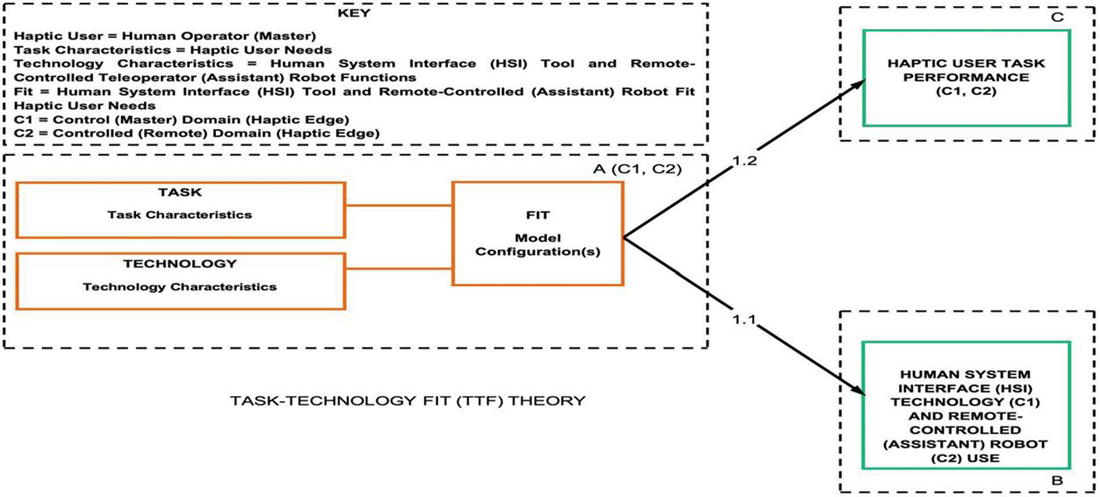
Figure 3 Conceptual task-technology fit (TTF) model for quality of experience (QoE) with quality of task (QoT) perspective of a haptic-enabled internet of skills (IoS).
The model would link task and technology characteristics in (i) the master (control) domain and (ii) the remote (controlled) domains.
First, task characteristics denote the most critical needs of the human technology user [11]. User needs can be specified as surgeons’ most critical task demands in remote robotic surgery (tele-haptic surgical task performance). For example, these include (i) control movement (motion) of remote assistant robotic arms (telemanipulators) e.g. to manipulate a needle drive (end effector) tool (surgical instrument) with wrist-like movements (1A), visualisation (with magnification) of the operative (surgical) field (area) e.g. for immersive stereoscopic view and endoscopic three-dimensional (3-D) High-Definition (HD) imaging (2A), and (iii) feeling and control of grasping force when operating on patient e.g. to displace tender organs (retraction) and soft tissue (clutching) (3A).
Second, technology characteristics denote critical support functions for the most critical needs of the task performer (human user) [12]. For example, there are critical corresponding support tools used by the surgeon including (i) interchangeable needle driver (end effector) tool (surgical instrument) attached to a lateral robotic arm with functional support i.e. movement up to 7 Degrees of Freedom (DoF) (1B), (ii) digital stereoscopic camera (optic lens) with progressive magnification up to 15 times (15x) (2B), and (iii) interchangeable grasper tool (surgical instrument) attached to a lateral robotic arm with functional support i.e. laparoscopic forceps (5 mm, 37 cm) or fenestrated-grasper (3B). These identified task and technology characteristics will be measured using five seven (7)-point Likert measures on a scale from 1 ( to an extremely small extent) to 7 ( to an extremely large extent) [13].
Use and User Performance outcomes will result from a “Fit” between Task and Technology characteristics. The presence of this “Fit” is essential for optimal use and user performance [11]. Thus, a computed/simulated task-technology fit (TTF) would be examined for its effects on Use and User Performance. A predictive (hypothetico-deductive) research design will be used to explain relationship between constructs in the conceptual TTF model. This approach will be used to examine configurations of TTF and its effects on haptic-enabled technology use and task performance.
First, Partial Least Squares – Structural Equation Modelling (PLS-SEM) will be used for data analysis. This will involve robust, component-based, second-generation Ordinary Least Squares (OLS) regression-based path modelling (path analysis) techniques.
Second, Polynomial Regression with Response Surface Methodology will be used to examine the interaction of task and technology components for non-linear effects on use and user performance. These effects will be examined via an atomistic approach, which involves examining separate task and technology components to assess the impact of each factor on use and user performance. Further, this will allow for three-dimensional (3-D) visualisation and observation of dynamic shifts in equilibrium levels between supplied technological support functions and corresponding task demands (user need). The purpose of an atomistic approach is to evaluate the “Fit” between two task and technology predictors and its impacts. The Polynomial Regression component will be implemented to model the relationship between task and technology characteristics, and use and user performance, non-linearly. Using latent variable scores obtained via PLS-SEM (path analysis), we will compute Task (X) and Technology (Y) components, their interaction (XY), and quadratics (X, Y), for predicting use and user performance using Polynomial Regression as per the following expression:
| (1) |
In the above expression, Z Use or User performance, X The Task, and Y The Technology.
5 Intended Scientific Contributions of the Research and Conclusion
We intend that the concepts discussed in this extended abstract and subsequent research will constitute four scientific contributions. First, we explore the potential shift from technical system-oriented QoS to user-centric QoE and QoT Internet architectures of the future. Second, we discuss the emergence of a future ultra-reliable and ultra-low-latency B5G network and haptic-enabled Internet architecture. Third, we apply this architecture to the use case of tele-haptic surgical task performance (remote robotic surgery applications). Lastly, we discuss Task-Technology Fit (TTF) theory and predictive modelling as well as propose related empirical (data-driven) methodologies that can be applied to this use case for a novel QoE/QoT perspective.
With recent advances in ultra-reliable and ultra-low latency communications that will be more prevalent in next generation digital networks, we contribute towards conceptualising the emerging shift from QoS-centric content-delivery networks to QoE and QoT centred skillset-delivery network architectures that will characterise closed-loop control architectures for B5G and haptic-enabled Internets, from the novel perspective of task-technology fit (TTF) conceptualisation and modelling for predictive analysis. This envisioned future Internet will incorporate the task performer in a context-specific technology user-centric domain (remote environment) operating as the human-in-the-loop (HITL), via real-time true-to-life human-to-machine/robot (H2M/R) interactions. We draw on the mission-critical use case of remote (tele-haptic) robotic surgery which is expected to be realised in the B5G era. With a B5G network and haptic IoS, surgeons in the future will be adequately equipped to seamlessly perform remote (tele-haptic) robotic surgery tasks.
References
[1] Giordani, M. Polese, M. Mezzavilla, S. Rangan and M. Zorzi, “Toward 6G Networks: Use Cases and Technologies,” IEEE Communications Magazine., vol. 15, no. 3, pp. 55–61, 2020.
[2] R. Basoli, H. Boche, C. Deppe, R. Ferrara, F.H.P. Fitzek, G. Janssen and S. Saeedinaeeni, Quantum Communication Networks, Cham, Switzerland: Springer, 2021.
[3] S.J. Nawaz, S.K. Sharma, S. Wyne, M.N. Patwary and M. Asaduzzaman, “Quantum Machine Learning for 6G Communication Networks: State-of-the-Art and Vision for the Future,” IEEE Access., vol. 7, no. 1, pp. 46317–46350, 2019.
[4] M. Dohler, “The Future and Challenges of Communications – Toward a World Where 5G Enables Synchronised Reality and Internet of Skills,” Internet Technology Letters., vol. 1, no. 2, pp. 1–3, 2018.
[5] L. Pierucci, “The Quality of Experience Perspective Toward 5G Technology,” IEEE Wireless Communications., vol. 22, no. 4, pp. 10–16, 2015.
[6] D-H. Shin, “Conceptualising and Measuring Quality of Experience of the Internet of Things: Exploring How Quality is Perceived by Users,” Information and Management., vol. 54, no. 8, pp. 998–1011, 2017.
[7] N. Banovic-Ćurguz, D. Iliševic and D. Budimir, “Towards Digital Transformation with 5G Technology,” International Journal of Electrical Engineering and Computing., vol. 2, no. 2, pp. 101–109, 2018.
[8] E. Lioutou, D. Tsolkas and N. Passas, ‘A Roadmap on QoE Metrics and Models,’ Proc. 23rd International Conference on Telecommunications (ICT), pp. 1–5, Greece, May., 2016.
[9] K. Antonakoglou, C. Xu, E. Steinbach, T. Mahmoodi and M. Dohler, “Toward Haptic Communications Over the 5G Tactile Internet,” IEEE Communications Surveys and Tutorials., vol. 20, no. 4, pp. 3034–3059, 2018.
[10] M.T. Dishaw and D.M. Strong, “Supporting Software Maintenance with Software Engineering Tools: A Computed Task-Technology Fit Analysis,” The Journal of Systems and Software., vol. 44, no. 2, pp. 107–120, 1998.
[11] W.D. Nance, “Task/Technology Fit and Knowledge Worker Use of Information Technology: A Study of Auditors,” Ph.D. Dissertation, University of Minnesota, MN, USA, 1992.
[12] M.T. Dishaw, D.M. Strong and D.B. Bandy, ‘Extending the Task-Technology Fit Model with Self-Efficacy Constructs,’ Proc. 8th Americas Conference on Information Systems, pp. 1021-1027, USA, Aug., 2002
[13] H-D. Yang, S. Kang, W. Oh and M.S. Kim, “Are All Fits Created Equal? A Nonlinear Perspective on Task-Technology Fit,” Journal of the Association for Information Systems., vol. 14, no. 2, pp. 694–721, 2013.
Biographies

Maradona C. Gatara is Wits Business School (WBS) Postdoctoral Research Fellow in the BCX Chair in Digital Business at the University of the Witwatersrand (Wits) in Johannesburg, South Africa. His research interests include next-generation digital networks, haptics, health informatics, and technology-enabled service delivery systems. He specializes in quantitative techniques (hypothetico-deductive), multivariate data analysis, structural equation modeling (SEM), response surface methodology, quasi-experimental post-test design, technology-to-performance chain (TPC) models, and user experience (UX) research. He received PhD, Master of Commerce (MCom) (Distinction) and Bachelor of Commerce (BCom) (Honours) degrees in Information Systems (IS) from Wits; and a Bachelor of Science (BSc) degree in Information Systems & Technology (IST) from the United States International University–Africa (USIU-A), Nairobi, Kenya. He has authored/co-authored at least seventeen (17) publications: a book chapter (1), five (5) empirical papers in international peer-reviewed journals and conference proceedings, and eleven (11) additional completed manuscripts targeted/submitted for publication.

Mjumo Mzyece is Associate Professor of Technology and Operations Management at WBS, Wits University, in Johannesburg, South Africa. His research interests include next-generation digital networks, and technology policy, strategy and management. He has over 20 years of international experience in academia, industry and the public sector. He has authored/co-authored over 60 peer-reviewed scientific publications and mentored over 30 students at postdoctoral, doctoral and master’s levels. He received a Bachelor of Engineering (BEng) (Honours) in Electronic & Electrical Engineering from Manchester University, England; a Master of Science (MSc) (Distinction) in Communications Technology & Policy and a PhD in Mobile & Wireless Communications Engineering, both from Strathclyde University, Scotland; and an MBA from Duke University, NC, USA.
Journal of Mobile Multimedia, Vol. 19_1, 135–146.
doi: 10.13052/jmm1550-4646.1917
© 2022 River Publishers