Swarm Optimization of Fuzzy Systems for Mobile Robots with Remote Control
Oleksiy Kozlov1,*, Yuriy Kondratenko1, 2, Oleksandr Skakodub1, Oleksandr Gerasin2 and Andriy Topalov2
1Intelligent Information Systems Department, Petro Mohyla Black Sea National University, Mykolaiv, Ukraine
2Computerized Control Systems Department, Admiral Makarov National University of Shipbuilding, Mykolaiv, Ukraine
E-mail: kozlov_ov@ukr.net; y_kondrat2002@yahoo.com; aleksandrskakodub1996@gmail.com; oleksandr.gerasin@nuos.edu.ua; topalov_ua@ukr.net
*Corresponding Author
Received 24 January 2022; Accepted 25 June 2022; Publication 15 February 2023
Abstract
This paper is dedicated to the development and research of the advanced approach for optimization of fuzzy control systems (FCS) for mobile robots (MR) with remote control based on bioinspired swarm techniques. The proposed approach makes it possible to create effective intelligent control systems for MRs based on the principles of hierarchical multi-level control, remote IoT-based control, fuzzy logic control, and intelligent optimization of fuzzy control devices. The applied hybrid particle swarm optimization (PSO) techniques with elite strategy allow effectively optimizing various parameters of FCSs, finding the optimal solution to the problem, and, at the same time, have a higher convergence rate compared with the basic PSO algorithms. To evaluate the effectiveness of the obtained advanced approach based on hybrid swarm techniques, the optimization process of the FCS for the speed control of the multi-purpose caterpillar MR, which can move on inclined and vertical ferromagnetic surfaces, is carried out. The presented research results fully confirm the high efficiency of the proposed approach, as well as the expediency of its application for the optimization of fuzzy control systems for various remotely controlled mobile robots.
Keywords: Fuzzy control systems, mobile robots, optimization, bioinspired swarm techniques, Internet of Things, remote control.
1 Introduction
Nowadays, there is an extensive digitalization of the economies of the developed countries in the world. Industry 4.0 and the Internet of Things (IoT) technologies are successfully used in various industries, agriculture, and transportation. In particular, there is a trend towards a more confident use of the Internet of Things technologies for tasks not only of monitoring but also of control, even of diverse types of mobile moving objects [1–3]. The risks associated with information security and the protection of transmitted data from the sensors and control signals do not stop developers (the cybersecurity of such systems is also developing in parallel and quite rapidly) [4, 5].
Thus, new digital solutions are being implemented in agriculture, namely, “smart” harvesters, and greenhouses controlled by artificial intelligence (AI) are being appeared; big data analytics helps to predict drought and other natural disasters [6, 7]. These and other scientific and technical solutions optimize costs and simplify data monitoring, control, and analysis, which, consequently, increases profits. Thanks to the current level of development of the IoT and AI technologies, it is possible to significantly increase the efficiency of the concept of precision farming by using the enormous computing capabilities of remote web-servers and big data algorithms, to determine the optimal time for irrigating, fertilizing, sowing and harvesting using mobile unmanned (airborne and ground) agricultural robots [8]. In particular, the quality of management is significantly improved due to the integrated consideration of the terrain (including satellite mapping, GIS), wind strength, soil quality, and moisture level, weather forecast (temperature change, precipitation) based on sensor data collected “on the spot” by the mobile robots.
The global market of digital solutions for transport and logistics is also rapidly developing. According to Forbes Insights, more than 60% of transport and logistics companies in the world have begun actively using digital technologies, including drones, unmanned vehicles, IoT and NFC technologies (near-field wireless data transmission), big data analytics, and AI [9]. Modern cargo control systems help logistics companies to control the freshness of products, fuel consumption, vehicle position, and driver’s driving style. And this, in turn, allows to track the possible (due to various reasons) incorrect behavior of the driver on the road and prevent a potential accident. For ordinary employees using smart public transport services, digital technologies can reduce the average travel time to and from work by 15–20% [2, 9].
The industrial Internet of things (IIoT) and intelligent control technologies are much less developed for production systems, although growth is also observed mainly for SCADA systems [10–12]. Much less attention in the literature is paid to the issues of IIoT control of mobile objects, which are used in industry to perform routine or dangerous technological operations for humans, especially many such tasks have to be performed by teams of workers in shipbuilding and ship repair when processing the ferromagnetic surfaces of the ship hulls [3, 13]. MRs can reduce the present risks to workers’ health and life, as well as substantially improve the performance of technological operations on ferromagnetic surfaces. Cleaning, cutting, welding, polishing, painting, and inspection of large areas, as well as installation of individual elements and fire extinguishing on vessels, bridge supports, tanks, and large diameter pipelines, elevators are the main tasks that can be successfully performed by such mobile robots. However, the industrial MRs have to be able to operate under uncertainty of the working surface and simultaneously move along the given trajectories desirable in fully automatic mode [14, 15].
Traditional control theory means are not enough, as a rule, for reliable and efficient control of such robots, because they are rather complicated non-linear and non-stationary control plants [16, 17]. They require highly effective and safe automatic control systems, based on intelligent principles. In turn, recent research shows that intelligent systems based on fuzzy logic can be quite effectively used for the automation of different types of mobile robots, drones, and other unmanned vehicles [18–20]. On the one hand, the given fuzzy systems make it possible to effectively use expert information, implement complex and flexible control and decision-making strategies, have high interpretability and logical transparency, and can also be effectively trained like neural networks based on training samples or objective functions [21, 22]. On the other hand, to use these advantages and realize the full potential of fuzzy control systems in the automation of mobile robots, it is necessary to have effective approaches and methods for their synthesis and optimization [23, 24]. Thus, currently, research aimed at developing, improving, and testing such methods for the synthesis and optimization of MRs’ fuzzy control systems is very relevant.
The cutting-edge studies show that due to the rapid development and increase in the power of computer technologies, bioinspired intelligent methods of global search are quite promising for solving problems of synthesis and optimization of various fuzzy control systems [25, 26]. These methods include evolutionary and swarm techniques, that simulate processes of natural selection and collective behavior of various social groups of animals, insects, and microorganisms, as well as have several advantages over the classical search methods [27, 28]. Therefore, it is advisable to use the main principles of these bioinspired methods as the basis for creating a highly efficient approach to optimizing fuzzy systems for remotely controlled mobile robots.
This study is devoted to the development of the advanced approach for optimization of fuzzy control systems for mobile robots with remote control based on bioinspired swarm techniques. The rest of the paper is organized in the following way. Section 2 presents a brief literature review of the studied area and the main purpose of this work. Section 3, in turn, describes in detail the proposed advanced approach for optimization of fuzzy systems for remotely controlled MRs. Section 4 presents the results of studying the effectiveness of the designed approach on a specific example of a fuzzy control system for the mobile robot capable of moving on inclined ferromagnetic surfaces. Finally, Section 5 concludes the work and suggests the directions for future studies.
2 Related Works
The issues of developing intelligent control systems for mobile robots, which are controlled via the global Internet and able to navigate in space (including limited), move along curvilinear trajectories, and perform technological operations, are studied in a limited form and remain open [29]. In many cases, it is advisable to build remote control systems for mobile robots based on the generalized structure shown in Figure 1 [30]. This structure allows implementing effective local automatic control of the MR using a local robot computer, as well as remote monitoring and control via the Internet using a web server, desktop computers, and various mobile devices.
Although MRs of this class are extremely important for inspection and research purposes, the creation of their embedded systems based on methods and principles of building intelligent multimedia control systems are becoming especially relevant due to the ever-increasing requirements for quality control, complicating existing mobile robots as control plants, as well as increasing the amount of information processing based on the Internet of Robotic Things (IoRT) [31–33]. Due to the countless advantages of the spread of cloud robotic systems, there has been an increase in sales of such systems in recent years, and this trend is leading to growth [34, 35].
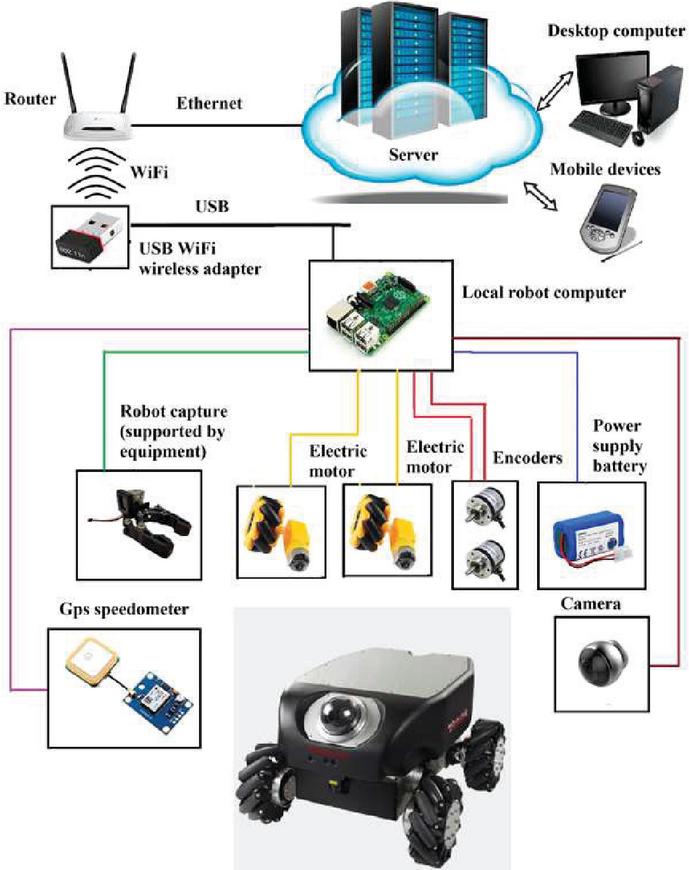
Figure 1 Generalized structure of the remote control system for MR.
Thus, in [35] the authors consider the problem of developing cloud distributed control systems for mobile robots. A set of nine most important design parameters for such systems is identified: general technical requirements for implementation, assessment of the number of connected sensors, specification of the number of drives and non-motorized degrees of freedom, assessment of the need for rapid prototyping, assessment of the criticality of fault tolerance requirements, determination of computing power for the operation of the system, evaluation of the criticality of the noise immunity of the device, evaluation of the limitation on the distance between interacting modules, assessment of the real-time requirements. Moreover, in [36] modern technologies of resource allocation and provision of services in multi-agent cloud robotics are comprehensively considered. The full taxonomy of resource allocation computing and task planning for effective cloud robotics management is presented. Specific examples of IoRT application are in paper [37], which presents a method of traffic planning to coordinate several mobile robots with avoidance of collisions, and the control architecture for the use of cloud computing, operating in real-time. Another similar example is considered in [38], which presents the server infrastructure, the grid method, the artificial potential field method, and the ant colony algorithm. Also, in [39] much attention is paid to the means of communication of mobile robots. In turn, the authors have designed three mobile robots with a single control system that has centralized control by a central server with ROS implementation for local communication and the Internet of Things via MQTT.
The principal outcomes of the systematic review show that the main research focuses on the analysis of key components that a cloud robotic system is made of and how these systems are evaluated. It should be noted that the main trends for the creation of cloud robotics are (a) the decentralization of data processing for the rational use of resources of the mobile robot and server, (b) means of wireless communication with secure communication channels, which provide significant benefits of controlling the mobile robot in a limited space and monitor it in real-time on computer devices connected to the Internet, and (c) modern means of intelligent control, which allow achieving the highest efficiency in the performance of various technological operations by the MRs.
The development of highly efficient intelligent control systems for mobile robots, in particular, fuzzy control systems, deserves special attention. Thus, many studies provide examples of the development and successful application of fuzzy control systems and devices for the automation of various mobile robots [40–42]. However, the issue of creating highly efficient methods and approaches to the FCSs synthesis and optimization, taking into account the peculiarities of the hierarchical structure and remote control, remains open. Recent theoretical and practical research in the field of AI shows that bioinspired evolutionary and swarm methods can quite successfully solve the problems of synthesis and optimization of fuzzy control systems of various classes and purposes [43–45]. The given bioinspired intelligent techniques have the following advantages and attractive features: (a) the strong ability of local minima avoiding compared to the conventional optimization methods; (b) the usage of derivation-free mechanisms in the optimization process; (c) the flexibility and relative simplicity of basic procedures; (d) easy adaptability for solving completely different real-life optimization problems as well as for the synthesis and optimization of the various high-dimensional fuzzy systems. Furthermore, these methods can be effectively hybridized with the local search techniques of different types which allows to rationally take advantage of global and local search strategies [46, 47]. As a result of such combinations, specific hybrid methods are obtained that require fewer iterations to find global optima at solving optimization problems [48–50].
Among the considered bioinspired intelligent techniques, the most efficient and well-proven are ant colony optimization (ACO) algorithms [51], genetic algorithms (GA) [52], methods of artificial immune systems (AIS) [53] and differential evolution (DE) [54]; artificial bee colony (ABC) [55] and particle swarm optimization [56] algorithms, bacterial foraging optimization (BFO) [57] and biogeography-based optimization (BBO) [58] algorithms, etc. The considered bioinspired optimization techniques can be conditionally divided into two main groups: evolutionary methods, which simulate processes of natural selection and evolution in nature, and swarm methods, which model the interacting behavior of collective animals, insects, and microorganisms [28]. As the State-of-the-Art research in this area shows, swarm techniques have several advantages over the evolutionary methods [59]. In particular, swarm methods have fewer operators compared to evolutionary approaches (crossover, selection, cloning, mutation, migration, and so on) and fewer parameters to adjust [59]. Also, swarm algorithms save information about the search space throughout the iteration, while evolutionary algorithms discard the information of the previous generations [59]. As a result, swarm techniques can be easier implemented and are more effective in some cases. Thus, they are more appropriate to be used for the optimization of the fuzzy systems for remotely controlled mobile robots.
Since these techniques are highly iterative and can be performed on parallel processors, then when applying them for optimization of fuzzy systems for remotely controlled MRs, it is advisable to transfer all their main computing operations to a remote powerful server using IoT technologies.
Thus, the main purpose of this paper is the development and research of the advanced approach for optimization of fuzzy control systems for mobile robots with remote control based on bioinspired swarm techniques.
3 Advanced Approach for Optimization of Fuzzy Control Systems for Mobile Robots with Remote Control Based on Bioinspired Swarm Techniques
3.1 Basic Principles of Designing the Intelligent Control System for Mobile Robots with Optimization Unit
The proposed by the authors advanced approach involves the creation of an intelligent control system for mobile robots based on the following principles: hierarchical multi-level control, remote IoT-based control, and fuzzy logic control, as well as intelligent optimization of fuzzy control devices. In turn, the hierarchical multi-level control implies the presence of at least two levels of control (upper and lower) to ensure that mobile robots successfully perform complex tasks and different technological operations. In addition, the upper level can be divided into the highest, strategic and tactical levels of control, and the lower level is the executive control level. At the highest level, the intelligent control system must make a decision on the implementation of a particular technological operation, task, movement, or maneuver of the MR based on the analysis of the environment and the situation, assessment of current operating conditions, external disturbances, etc. [60]. In addition, to make decisions at this level, preliminary simulations of certain situations can be performed based on existing intelligent models to predict the MR’s behavior and the state of the environment. At the strategic level of control, after receiving certain commands (control goals) from the highest level it is necessary to plan technological operations, tasks, or movements and their transformation into certain sequences of elementary actions (subtasks) [60]. The strategic level forms commands for the tactical level to perform specific actions or basic operations. In turn, the main task of the tactical control level is to transform the control commands of the strategic level into the control programs that define the laws of coordinated functioning or movement of executive mechanisms and actuators of the executive level of control. The given programs define sequences of the set values of the generalized controlled coordinates of the MRs’ main executive mechanisms [60]. As for the lower (executive) level of control, it consists directly of executive mechanisms and actuators (AC), sensor systems (SS), as well as of automatic control subsystems, which due to the corresponding control impacts work out the set values of the MRs’ generalized controlled coordinates, that come from the tactical level [60]. In turn, the SS are used to receive feedback and to obtain all available information about the state of the mobile robots and the environment.
The remote IoT-based control principle implies the possibility of dividing the system into the local and remote control levels to increase the effectiveness of the upper level, to simplify the structure, and reduce the cost of the system hardware. This separation is carried out using IoT technologies and allows transferring the upper control level with complex algorithms of the highest, strategic and tactical control to a powerful remote web server with significant computing capabilities. Also, the use of IoT technologies allows the system operator, if necessary, to intervene in the control process at the upper level, make any settings and track all changes from anywhere in the world with the Internet using a special human-machine interface. In turn, relatively simple control mechanisms of the lower (executive) level are implemented at the local level using the embedded hardware of mobile robots to increase the reliability and autonomy of the system.
The principle of fuzzy control implies the use of fuzzy systems and control devices, as well as observers and identifiers at the lower (executive) control level to improve the accuracy and quality of control of mobile robots as complex plants with non-linear and non-stationary parameters. Also, fuzzy devices and systems can be successfully applied at the upper level of control.
The principle of intelligent optimization of fuzzy control systems and devices implies the implementation of structural-parametric optimization procedures for fuzzy systems and devices of the lower level using bioinspired swarm techniques to increase their efficiency. These procedures can be conducted both during the initial synthesis of fuzzy systems and devices and in the process of subsequent MRs’ operation when it becomes necessary to improve their performance. In turn, the powerful optimization units should be located in the remote web server to speed up the optimization procedures and simplify the hardware at the local level.
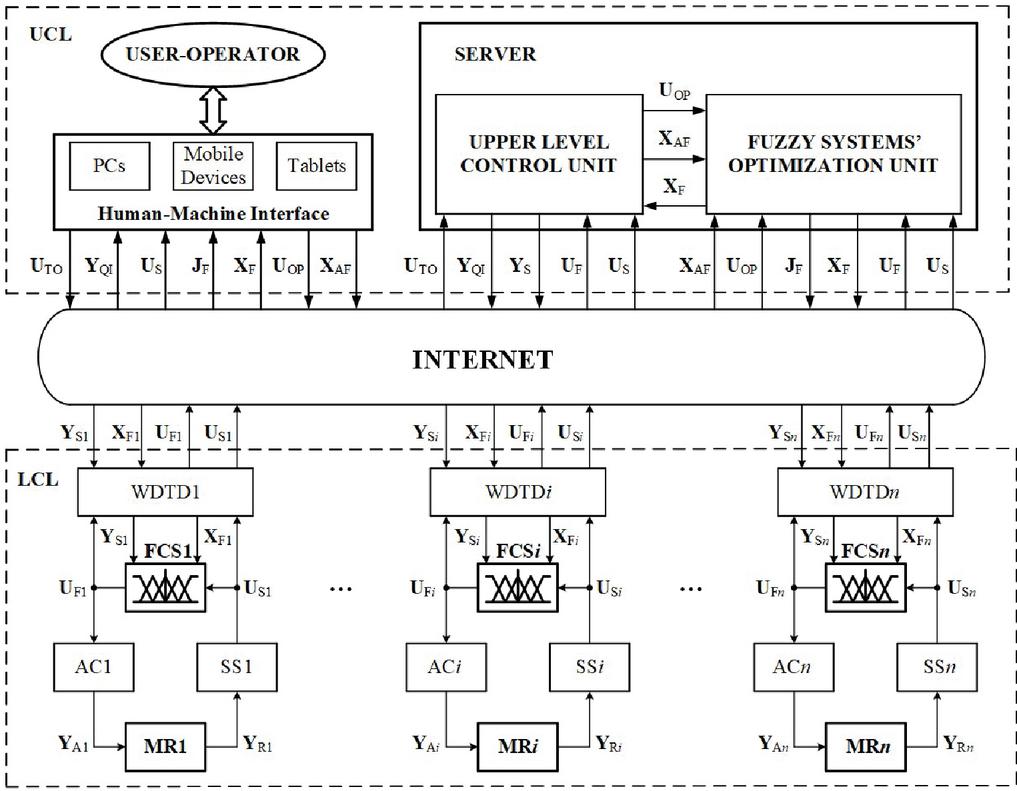
Figure 2 Functional structure of the generalized hierarchical IoT-based intelligent control system for mobile robots with optimization unit.
3.2 Structure of the Hierarchical IoT-based Intelligent Control System for Mobile Robots with Optimization Unit
Taking into account all the above principles, the functional structure of the hierarchical IoT-based intelligent control system for mobile robots is developed according to the proposed advanced approach. The given structure is presented in Figure 2, where the following abbreviations are used: UCL is the upper control level; LCL is the lower control level; FCSi is the i-th fuzzy control system of the lower level for the i-th mobile robot (); WDTDi is the i-th wireless data transmission device for the i-th MR; Y, Y are i-th vectors of set and real values of the control variables of the i-th MR (); Y is the vector of the actuators outputs of the i-th MR; U is the vector of the i-th sensor system’s output signals; U is the vector of the control signals of the i-th fuzzy control system; X is the vector of adjustable parameters of the i-th fuzzy control system; Y is the vector of set values of the control variables of all n mobile robots (Y Y, YYY ); U is the vector of output signals of all n sensor systems (U U, UUU ); U is the vector of control signals of all n FCSs (U U, UUU ); Y is the vector of quality indicators of technological operations performed by all n robots; U is the vector of control signals that specify the performance of certain technological operations by all n robots; X is the vector of adjustable parameters of all n FCSs (X X, XXX ); J is the vector of objective functions that are used for optimization of all n FCSs; X is the vector of adjustable parameters for optimization procedures (includes selection of optimization methods and their parameters, parameters and structures of MRs’ models, parameters and structures of FCSs; parameters of objective functions, etc.); U is the vector of signals that control the start of optimization processes of a particular fuzzy system.
The presented hierarchical IoT-based system is designed for controlling of n mobile robots, in particular, their spatial movement and the implementation of various technological operations. In turn, the given robots can perform jointly a single operation on a single plant or several different operations separately on the different plants. To do this, each MR is equipped with several actuators, as well as with a system of sensors (SS). To implement the high-performance control of MRs’ actuators and main coordinates, the fuzzy control systems are used at the lower level of control. The sensor systems provide feedbacks for these FCSs, as well as the acquisition of information about the current state of the performed technological operations and the robots themselves. All information from sensor systems, as well as FCSs’ control signals, are sent to the upper control level via the Internet using the wireless data transmission devices. Also, these devices receive signals corresponding to the set values of the controlled coordinates Y and adjustable parameters of the fuzzy control systems from the upper control level X . In turn, the upper level control unit is located on a powerful server and designed to control the execution of technological operations and for MRs coordination. In particular, the given unit receives the control objectives from the user-operator, as well as the commands to perform certain technological operations. It performs the planning of operations, dividing them into elementary actions, drawing up the sequences of their execution, issuing control signals at the necessary time points, evaluating the quality of operations performed, evaluating the quality of control of the fuzzy systems, as well as making decisions about the need to reconfigure and optimization of FCSs. Herewith, the user-operator remotely via the Internet sends the control objectives and commands for performing certain technological operations to the upper level control unit. Also, he receives the quality indicators of technological operations performed by all the robots and can make decisions about the need to optimize fuzzy control systems for improving their efficiency. To provide communication between the user-operator and the server, as well as to implement remote control and monitoring, a specialized human-machine interface is used, which can be installed on personal computers (PCs), tablets, and various mobile devices. In turn, the fuzzy systems’ optimization unit (FSOU) is also located on a powerful server and designed to conduct structural-parametric optimization of FCSs based on the advanced bioinspired swarm techniques to increase their efficiency. The detailed structure of the given optimization unit is presented in Figure 3, where the following abbreviations are used: OML is the optimization methods library; FCOU is the fuzzy controllers’ optimization unit; FCM is the fuzzy controller model; MRM is the mobile robot model; OFCU is the objective function calculation unit; FCML is the fuzzy controller models library; MRML is the mobile robot models library; MCU is the model correction unit.
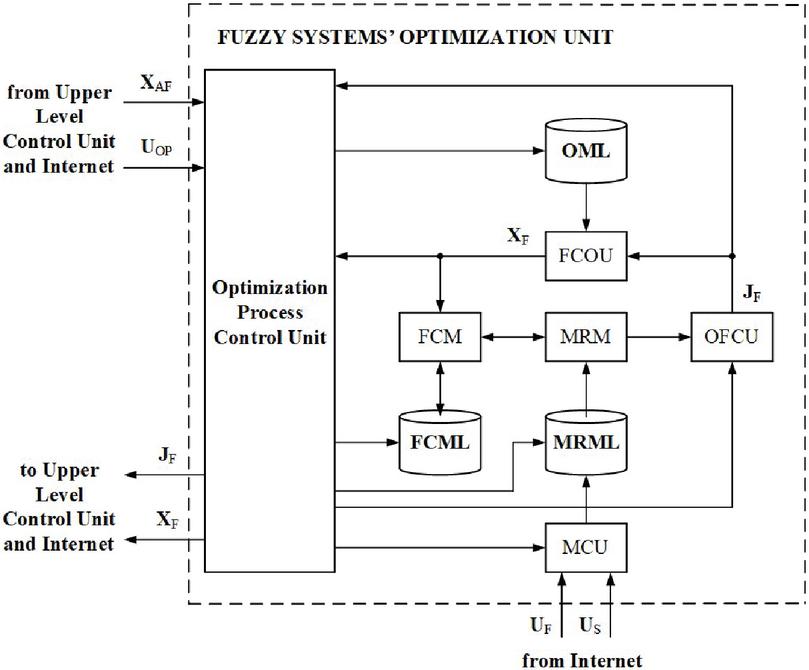
Figure 3 Functional structure of the fuzzy systems’ optimization unit.
The presented fuzzy systems’ optimization unit includes libraries of simulation models of all MRs and fuzzy controllers that are used in different control channels of the FCSs of the lower level of control. This allows performing optimization of any of the fuzzy controllers available in the system. Moreover, the model correction unit receives the current signals from the sensor systems of mobile robots U, as well as the control signals from their fuzzy controllers U, which allows tracking all changes in MRs, identifying their changing parameters, and adjusting the parameters of their models accordingly. Also, the fuzzy systems’ optimization unit has the optimization methods library, which consists of the advanced bioinspired swarm methods for conduction of the effective FCSs’ optimization. For direct carrying out the optimization procedures, the following units are used: FCM, MRM, OFCU, and FCOU. In turn, the MRM and FCM include the current models of the mobile robot and its fuzzy controller, selected for optimization. The OFCU is used for determining the objective function values J to evaluate the effectiveness of the fuzzy systems in the optimization process. The FCOU implements all the optimization procedures of the current fuzzy controller according to all the steps of the chosen optimization method. All new-found values of the adjustable parameters X are uploaded to the FCM and are sent via the Internet to the current fuzzy controller. Herewith, the control of all optimization procedures, choice of the necessary controller, its model, and the MR model, as well as the proper optimization method is carried out using the optimization process control unit based on the signals U obtained from the user-operator or the upper level control unit. Also, the optimization process control unit receives all the adjustable parameters for optimization procedures X from the user-operator or the upper level control unit and implements their setting to all the necessary units.
The main tasks that can be solved by the fuzzy systems’ optimization unit include the optimization of: the number of linguistic terms (LT) of input and output variables, as well as the types and parameters of their membership functions, the antecedents and consequents’ gains of the rule base (RB), the number of RB fuzzy rules, the input normalizing coefficients, the types of aggregation, activation and accumulation procedures, as well as the defuzzification method [61–63]. However, successful optimization of the FCS parameters (consequents’ gains, parameters of membership functions, and normalizing coefficients) has a decisive influence, since due to the flexible and efficient parametric optimization, it is possible to achieve the optimal value of the objective function with its various structural organization [64]. In turn, as swarm optimization techniques, it is advisable to use effective and well-proven PSO methods as well as their hybrid modifications. Next, let us consider in detail several modifications (basic and hybrid) of the PSO methods that can be effectively applied in the FSOU for efficient optimization of MRs’ fuzzy controllers.
3.3 Hybrid PSO Techniques for Optimization of MRs’ Fuzzy Controllers
Particle swarm optimization techniques simulate the collective behavior of flocks of birds or schools of fish with swarm intelligence as they move through space in search of better food sources [48, 64]. Models of interacting individuals of the flock in the PSO techniques are represented by the particles (agents) of a single swarm system, which move in a multidimensional search space finding the optimum of the problem and exchanging information with each other [56]. The current position of the Z-th particle in the m-dimensional search space on the N-th iteration is a potential solution to the optimization problem and, in the case of parametric optimization of a fuzzy system, is a certain value of the parameters’ vector X . In turn, the vector X mainly includes the vectors of normalizing coefficients K, adjustable parameters of linguistic terms P, and the weights of the consequences of the RB rules P,
| (1) |
In some cases, this vector may consist of separate vectors K, P, or P if the optimization is performed consistently.
Changing the current position of the Z-th particle in the iterative search process is carried out by adding to it the velocity vector V [56]
| (2) |
where Z is the total number of particles in the swarm; j is the parameter number that is optimized in the FCS; m is the total number of parameters that are optimized at the same time, depending on the FCS structure.
The velocity vector V in various PSO techniques is determined differently [64]. The most common and effective is the Gbest PSO algorithm [56], in which each particle is connected to all other particles of the swarm and tends to the best position of the whole swarm. According to this algorithm, the velocity vector of the Z-th particle V is calculated based on the dependence (3.3)
| (3) |
where , are the vectors of particle accelerations for optimized parameters, ; , are the vectors of random numbers from the range [0, 1], which bring stochasticity to the algorithm implementation, ; is the best position found by the Z-th particle in the search process, starting from the first iteration; is the global best position of the whole swarm of particles, which was found from the beginning of the search process.
In turn, the best position of the Z-th particle on the iteration N + 1 is determined based on the objective function J of the fuzzy system according to the dependence (4) [48]
| (4) |
The global best position of the whole swarm on the iteration N is selected from the best positions of all swarm particles , by the smallest value of the objective function J [56]
| (5) |
To increase the stability of the PSO techniques and prevent excessively rapid growth of the particles’ velocities, it is advisable to use a limiting mechanism [64], according to which the vector of real velocities of the Z-th particle on the iteration is determined based on the expression (6)
| (6) |
where is the velocity vector of the Z-th particle, which is calculated based on the expression (3.3); is the vector of maximum allowable values of particles’ velocities for optimized parameters, .
In turn, to improve and speed up the processes of FCS parametric optimization, the hybrid modifications of the PSO method are proposed by the authors in the paper [64]. In particular, the hybridization of the PSO technique is implemented based on the elite strategy with such algorithms of local search as gradient descent (GD) and extended Kalman filter (EKF). The main idea of these modifications is to conduct an independent parallel search by the best (elite) swarm particle using GD or EKF, which can significantly speed up the convergence and reduce the computational costs of the optimization procedures.
When using a gradient descent algorithm, the iterative procedures are carried out based on the Equation (7)
| (7) |
where is the vector of steps of gradient descent. In turn, the vector can be determined differently, depending on the selected gradient descent method (with a fixed step, with a fractional step, fastest descent, etc.).
In the case of using the algorithm of extended Kalman filter, the problem of the parameters optimization of a fuzzy system can be formulated as a nonlinear filtering problem [65], for which the model of the nonlinear system is described by expressions (8) and (9)
| (8) | |
| (9) |
where x is the system state vector; d is the system’s observation vector; f and h are nonlinear vector functions of system states; w and v are vectors of process and observation noise.
Moreover, the vector of estimates of the system states is determined using the extended Kalman filter algorithm based on expressions (10)–(13) as follows
| (10) | |
| (11) | |
| (12) | |
| (13) |
where F and H are matrices of system state partial derivatives of functions f and h ; K is a Kalman gains vector; P is a posterior error covariance matrix; Q and R are process and observation noise covariance matrices.
When implementing the algorithm (10)–(13) for parallel optimization of the vector of FCS parameters X : the given vector X is represented as a vector of the system states estimates , the FCS objective function J is the function h, the optimal (desired) value of the objective function J is represented as the system observations d [64, 65]. Also, the matrix F, in this case, is the identity matrix, and matrices Q and R are used as matrices of tunable parameters of this search algorithm.
Figure 4 shows the block diagram of the generalized hybrid PSO technique for optimization of MRs’ fuzzy controllers.
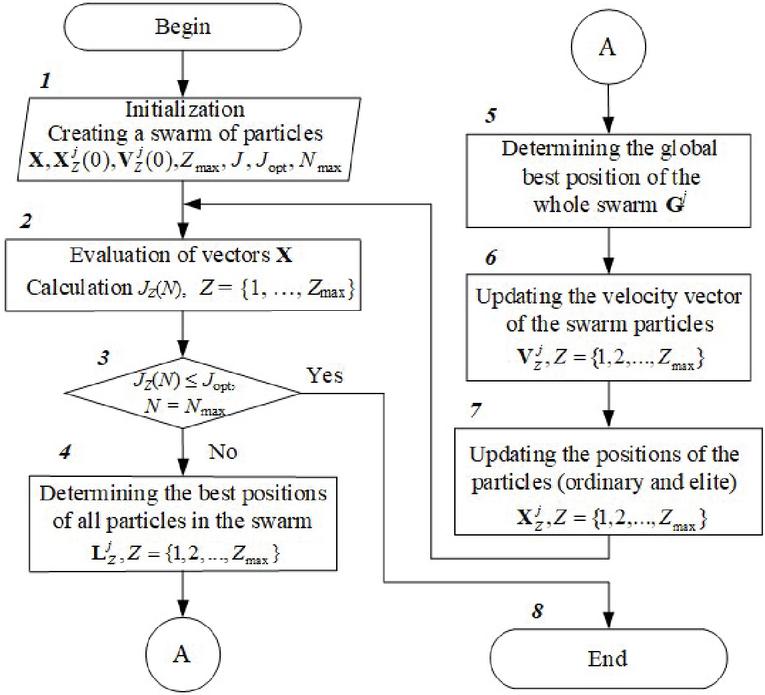
Figure 4 The block diagram of the generalized hybrid PSO technique for optimization of MRs’ fuzzy controllers.
The first step contains the initialization of the PSO technique, as well as the initialization of the parameters of the local search algorithm. At the stage of initialization, the following are selected: the vector of fuzzy system parameters X that are simultaneously optimized, as well as its restrictions and , ; the type, parameters, and optimal value of the FS’s objective function J; the maximum number of iterations N; the criterion of the optimization completion. Herewith, completely all the FCS parameters can be selected as the vector X, or separately taken vectors of normalizing coefficients K, adjustable LT parameters P, and the weights of the consequences of the RB rules P . In turn, the mean integral quadratic control error can be selected, for example, as the objective function J [64, 66]. As the criterion for the optimization completion, it is advisable to choose the achievement of the optimal value of the objective function or performing the maximum number of iterations N. Also, at this stage a swarm of Z particles is created, the initial positions of the particles are determined, their initial velocities , the vector of maximum allowable values of speeds , as well as the acceleration vectors and , . In turn, the initial positions of the particles should be determined randomly, and the values of velocities should be equal to 0. In addition, when choosing a gradient descent algorithm as a local search algorithm, the vector of steps is set depending on the specific method (fixed step, fractional step, fastest descent, etc.). When choosing the algorithm of the extended Kalman filter, the initial values of the parameters of the posterior covariance matrix of errors P, as well as the values of the covariance matrices Q and R are determined.
In step 2, for each Z-th particle of the swarm with the position , the value of the objective function of the fuzzy system is calculated.
In step 3, the checking of the optimization process completion is performed using the calculated values of the objective function for all the particles of the swarm, which is determined by achieving the optimal value of the objective function or performing the maximum number of iterations N. If this checking is positive, then go to step 8. Otherwise, go to step 4.
In the fourth step, the best position for each Z-th particle of the swarm is determined, , based on the values of the objective function according to the dependence (4).
In step 5, from the best positions of all swarm particles , , determined in the previous step, the global best position of the whole swarm is selected by the smallest value of the objective function based on the expression (3.3). Herewith, if the particle with this position was not elite in the previous iteration, it becomes an elite particle with a new global best position , and the elite particle with the previous best position becomes a separate elite particle.
In the sixth step, the values of the velocity vector are calculated based on the expression (3.3) for all particles of the swarm, except the elite. Also, for these particles, the vector of real velocities is calculated using the dependence (6) to limit the excessively rapid increase in the velocities of the particles.
The seventh step calculates the values of the positions of the particles in the m-dimensional search space based on the dependence (2) for all particles of the swarm, except the elite. In turn, for elite particles, the calculation of new positions at this step is performed using the selected local search algorithm. Thus, Equation (7) is used when choosing GD. Equations (10)–(13) are used when choosing the EKF algorithm. Next, go to step 2.
Step 8 is the completion of the FS optimization process.
To study the effectiveness of the proposed approach and hybrid swarm techniques with the elite strategy for optimization of MRs’ fuzzy controllers, the next section presents the optimization process of the FCS for automatic speed control of the multi-purpose caterpillar MR, which can move on inclined and vertical ferromagnetic surfaces [67–69].
4 Case Study: Optimization of FCS for the Multi-purpose Caterpillar MR Based on the Hybrid Swarm Techniques
The remotely controlled multi-purpose caterpillar mobile robots capable of moving on the inclined and vertical ferromagnetic surfaces are quite effectively used to move the working tools along specified trajectories for automatically performing different technological operations (inspection, welding, rust removal, painting, cleaning, etc.) in various industries [16, 30, 70–72]. The appearance of the 3D model and the physical model of the multi-purpose caterpillar MR is shown in Figure 5, a, b.
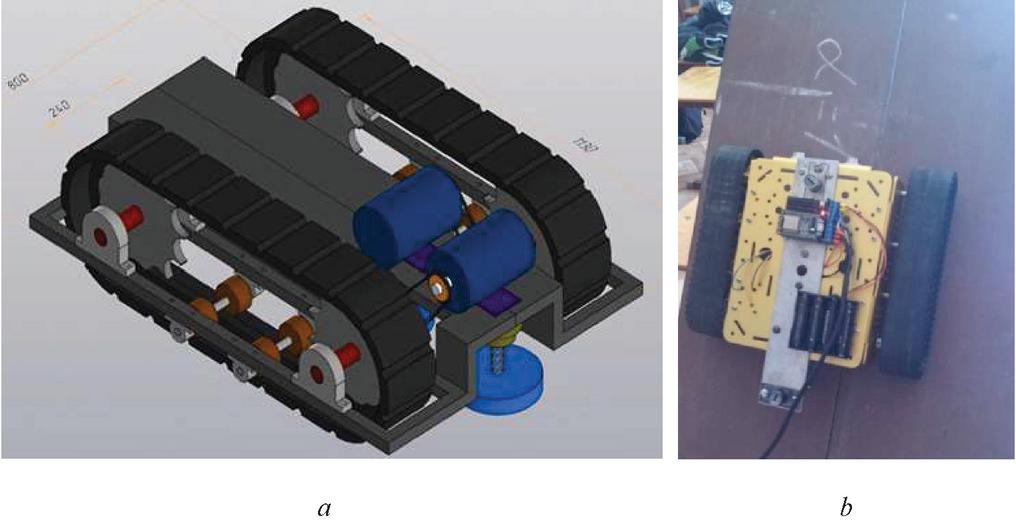
Figure 5 The appearance of the multi-purpose caterpillar MR: (a) 3D model; (b) physical model.
One of the most important tasks in the automation of the spatial motion of the caterpillar MR on an inclined ferromagnetic surface is the stabilization and automatic control of its speed [16]. In this work, to study the effectiveness of the proposed hybrid swarm technique with elite strategy, the parametric optimization of the fuzzy controller of the Takagi-Sugeno type for the MR’s speed automatic control is performed. In particular, the vector of weight gains of the consequences for the RB rules P of the fuzzy controller is selected as the vector of optimized parameters X . Other parameters and the structure of this fuzzy controller are set based on expert knowledge [64].
The considered remotely controlled caterpillar MR has the following characteristics: the total weight of the MR with equipment is 160 kg; the MR’s length is 1.1 m; the MR’s width is 0.85 m; the radius of the caterpillar’s drive wheel is 0.16 m. The detailed functional diagram of the speed automatic control system and the mathematical model of this mobile robot are presented in the papers [16, 64]. In turn, the developed fuzzy speed controller of the Takagi-Sugeno type implements the fuzzy control law based on the dependence (14)
| (14) |
where u is the fuzzy controller output signal; is the speed control error; K, K, and K are the normalizing coefficients for the controller inputs. In turn, K; K; K [64].
For the first controller input, 5 linguistic terms of triangular type are chosen: BN – big negative; SN – small negative; Z – zero; SP – small positive; BP – big positive. In turn, for the second and third inputs, 3 LT of triangular type are selected: N – negative; Z – zero; P – positive. The appearance of the selected terms with the set parameters is shown in Figure 6.
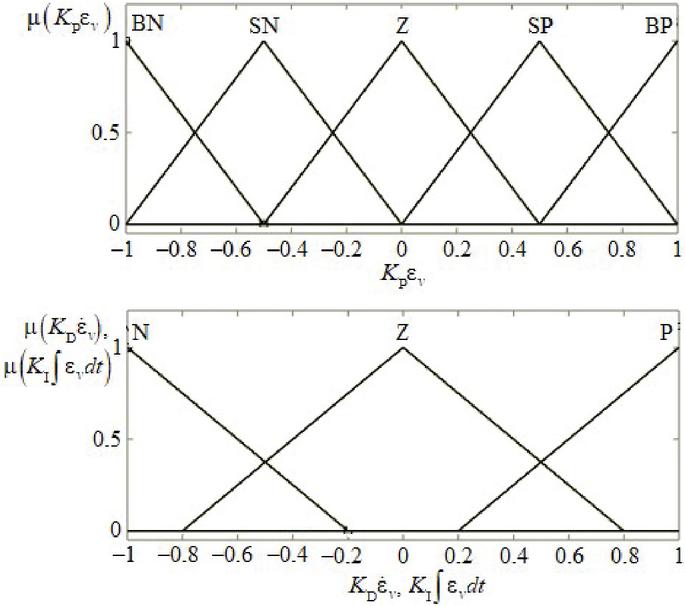
Figure 6 The appearance of the linguistic terms with the set parameters for the MR fuzzy controller.
The total number of RB rules of the fuzzy controller s is determined by the number of all possible combinations of the inputs’ linguistic terms and is equal to 45, . Each r-th rule of the given RB is presented by the expression (15)
| (15) |
where LT, LT, LT are the corresponding linguistic terms; k, k, k are the weight gains of the consequents for the r-th RB rule.
The vector of the weight gains of the consequences P, in this case, consists of 135 gains.
For the comparative analysis and study of the effectiveness of the proposed swarm approach, the parametric optimization of the RB weights is performed with the implementation of the following techniques: basic PSO Gbest, hybrid PSO based on the elite strategy with GD, hybrid PSO based on the elite strategy with EKF, as well as separately taken algorithms of the gradient descent and the extended Kalman filter.
In this case, at the initialization stage (step 1), the vector of weight gains of the consequents of the rules P is selected as a vector of optimized parameters X . In turn, the following restrictions are chosen when optimizing this vector: , , , .
As the objective function J, in this case, the generalized integral deviation of the real transient characteristic of the MR’s control system v(t, P ) from the desired transient characteristic of its reference model v(t) is chosen [64]
| (16) |
where t is the total transient time of the MR’s fuzzy control system; , are the weight coefficients; E is the deviation v(t, P ) from v(t), E v(t) v(t, P ).
In turn, the optimal value of the objective function is chosen J, at which the deviation of the real transient characteristic v(t, P ) from the desired v(t) is within acceptable limits. The execution of the maximum number of iterations N is chosen as the criterion for optimization completion. At the stage of initialization of the PSO algorithm, the main parameters were selected experimentally for this particular task. In particular, a swarm was created to implement each technique with a number of particles Z. In this case, the initial positions of the particles were determined randomly, and their initial velocities were equal to zero. The maximum allowable values of the particle velocity as well as the particle acceleration values were chosen to be the same for all optimized parameters: V; C; C. At the initialization stage of the parameters of local search algorithms, for gradient descent, a fixed-step algorithm was chosen, – for all optimized parameters. In turn, for the extended Kalman filter algorithm, the initial values of the parameters of the posterior covariance error matrix were selected as P, where I is the identity matrix of size 135. The covariance matrix is defined as , and matrix R, in this case, is a scalar, R 480, since the optimized system has only one output.
The parametric optimization of the fuzzy controller weights P was performed alternately using each of the algorithms 5 times, followed by the selection of the best results. Also, at the evaluation of the formed vectors X when calculating the objective function J, the simulation of the MR’s transients was carried out in different operating modes (under the action of various input and disturbing influences) to effectively optimize all parameters of the speed fuzzy controller.
To evaluate the effectiveness of the techniques used to optimize the speed controller for the mobile robot, it is advisable to compare the best values of the objective function J, as well as the computational costs of these techniques [64]. Also, for the evaluation, the computational costs required to find the given optimal value of the objective function J can be used. Herewith, the computational costs of these methods are mainly determined by the total number of times of calculation of the objective function required to achieve its certain value ( – to achieve the optimal value , – to achieve the best (minimum) value ).
In turn, to determine the parameter depending on the number of iterations , required to achieve the optimal value of the objective function, the following equations can be used for the above techniques: (17) – for the basic PSO, (18) – for the hybrid PSO techniques based on the elite strategy (with GD or EKF):
| (17) | |
| (18) |
Similarly, using the above equations, the parameter can be calculated based on the number of iterations , required to achieve the minimum value of the objective function. In turn, for the separately taken gradient descent and algorithm of the extended Kalman filter, the number of calculations of the objective function , which is required to achieve its minimum value J, is equal to the number of iterations .
The best results of experiments obtained in the process of optimizing the weights for the consequences of the RB rules using each of the techniques are presented in Table 1.
Table 1 The best results of experiments obtained in the process of optimizing the MR’s fuzzy control system
| Optimization Technique | |||||
| Basic PSO Gbest | 144 | 4206 | 0.183 | 167 | 4873 |
| Hybrid PSO with GD | 84 | 2550 | 0.149 | 98 | 2970 |
| Hybrid PSO with EKF | 78 | 2370 | 0.146 | 94 | 2850 |
| GD | – | – | 0.479 | 87 | 87 |
| EKF | – | – | 0.412 | 79 | 79 |
Figure 7 shows the changing curves of the objective function (16) best values in the process of optimization of the vector X based on the considered methods: 1 – basic PSO Gbest, 2 – hybrid PSO with GD, 3 – hybrid PSO with EKF; 4 – GD; 5 – EKF.
As can be seen from Table 1 and Figure 7, the proposed hybrid PSO techniques based on the elite strategy with GD and EKF allow conducting optimization of the weights for the RB consequences of this fuzzy controller much more efficiently compared to the basic PSO method Gbest. Thus, finding the optimal value of the objective function J using hybrid PSO techniques with EKF and GD required at best, respectively, for 1836 and 1656 calculations of the objective function less than when using the basic method Gbest. Moreover, the implementation of these hybrid methods on average provided achievement of a lower minimum value of the objective function J compared to the basic PSO method. To solve this particular problem, the most effective is a hybrid PSO technique based on the elite strategy with EKF, the implementation of which managed to achieve the optimal value of the objective function of the fuzzy control system for the least number of calculations of the objective function (). Also, when implementing this method on the 94-th iteration (Figure 7, curve 3) the lowest value of the objective function was achieved (J).
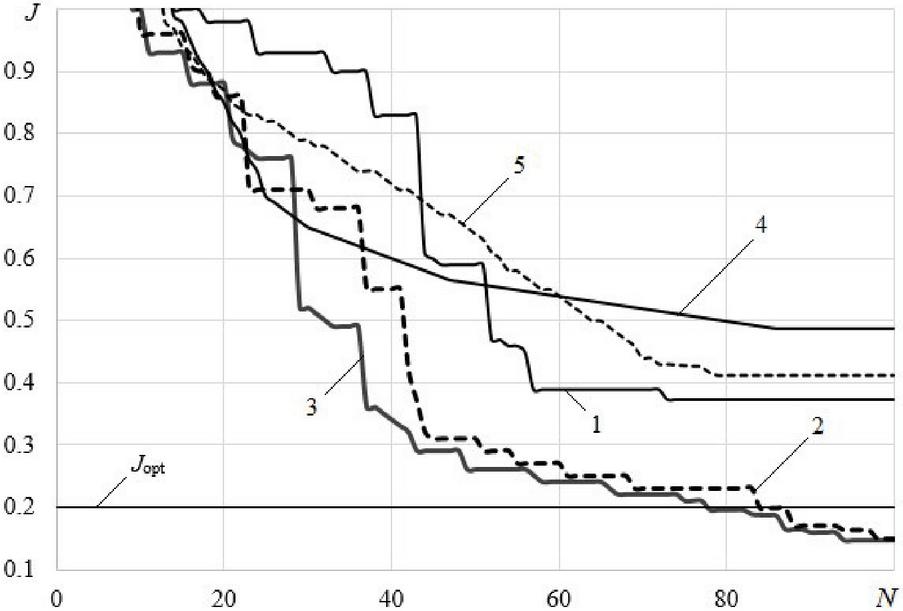
Figure 7 Changing curves of the best values of the objective function J in the optimization process of the MR’s fuzzy control system (in the range N 0…100).
As for the separately taken algorithms of gradient descent and extended Kalman filter, although their implementation requires much lower computational and time costs compared to the bioinspired swarm techniques, their application did not allow to achieve the optimal value of the objective function in solving this problem.
The fragment of the rule base for this fuzzy controller, optimized using the presented hybrid PSO method based on the elite strategy with EKF for the smallest value of the objective function, is presented in Table 2.
To confirm the effectiveness of the developed fuzzy system with an optimized controller based on the proposed hybrid PSO techniques, Figure 8 presents the transients of the MR motion on an inclined ferromagnetic surface under the action of strong step disturbances. These graphs of transients are obtained for the fuzzy control system with the optimized vector of the RB consequents gains P based on: 1 – basic PSO Gbest; 2 – hybrid PSO with GD; 3 – hybrid PSO with EKF. Line 4 is a step disturbance in the form of the load force of the technological operation F (t), varying in the range from 0 to 600 N.
Table 2 Fragment of the rule base for the MR’s fuzzy controller
| Linguistic Terms | Consequents Weights | |||||
| Rule | of Input Variables | of Rules | ||||
| Number | k | k | k | |||
| 1 | BN | N | N | 63.41 | 42.14 | 53.27 |
| 5 | BN | Z | Z | 91.13 | 73.55 | 69.72 |
| 18 | SN | P | P | 48.41 | 74.16 | 47.14 |
| 23 | Z | Z | Z | 69.34 | 51.63 | 29.45 |
| 30 | SP | N | P | 14.58 | 31.88 | 88.16 |
| 36 | SP | P | P | 31.79 | 59.13 | 39.21 |
| 41 | BP | Z | Z | 32.11 | 17.22 | 69.13 |
| 45 | BP | P | P | 9.67 | 24.26 | 45.84 |
In turn, the simulation was performed with the following parameters: the angle of inclination of the working surface ; the set speed value v m/s. The detailed transients of the MR motion under disturbances are presented in Figure 9. Also, Table 3 presents a comparative analysis of the quality indicators for the speed control system at these processes of MR movement (Figure 8).
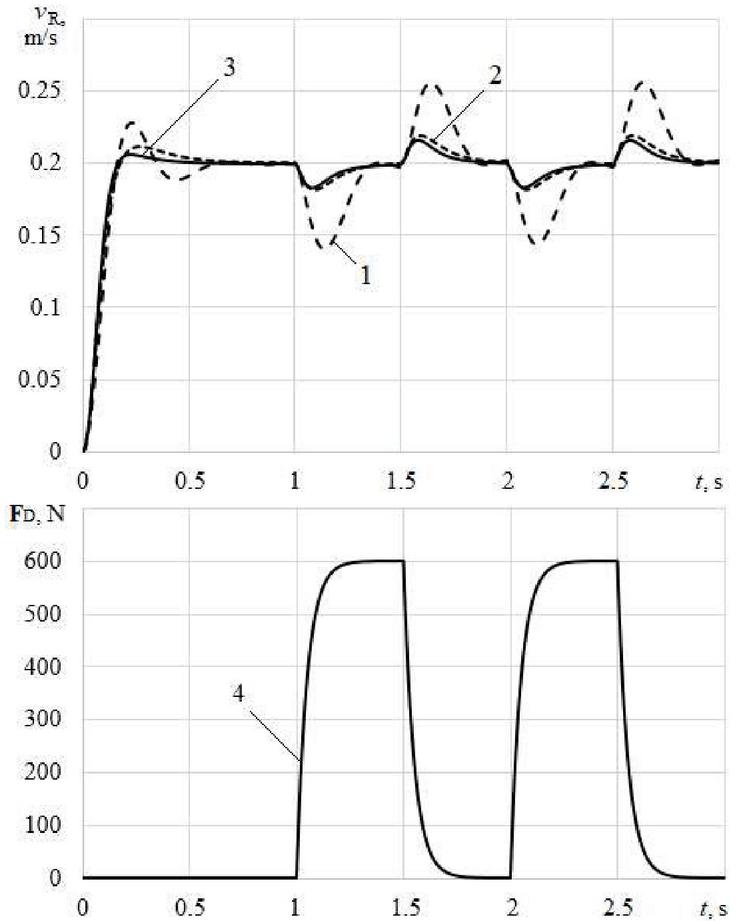
Figure 8 Transients of the MR motion on an inclined ferromagnetic surface under the action of strong step disturbances.
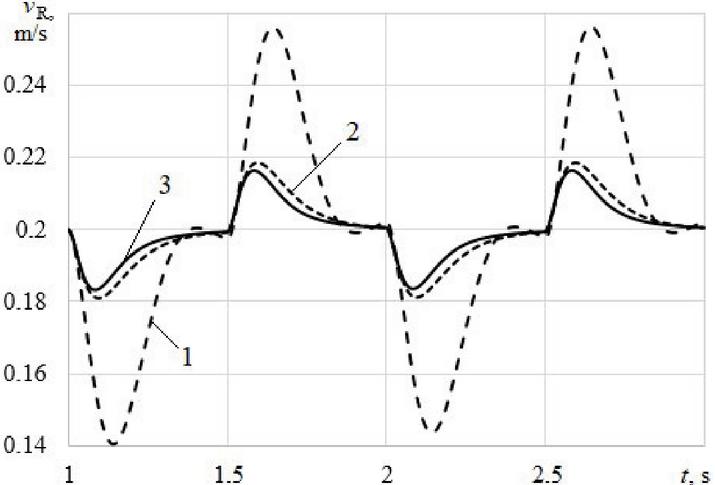
Figure 9 Detailed transients of the MR motion under the action of strong step disturbances.
As can be seen from Figures 8, 9, and Table 3, the MR’s fuzzy control system with the optimized vector of RB consequents gains P based on both modifications of the proposed hybrid technique for parametric optimization (hybrid PSO based on elite strategy with GD, hybrid PSO based on elite strategy with EKF) has higher quality indicators of control than the system with optimized vector P based on the basic PSO method.
In particular, the control system with the optimized fuzzy controller using the hybrid PSO technique with EKF has the best performance when accelerating the MR to a given speed value, as well as the smallest deviations (no more than 8.31%) under the influence of strong step disturbances. As a result, it gives the opportunity to significantly increase the total efficiency of the mobile robot and various technological operations. Namely, by increasing the reduction of deviations of movement speed, caused by the action of disturbances, the quality of the execution of technological operations is significantly improved due to more uniform staining, rust removal, or welding during these operations. Moreover, due to a significant increase in transients speed, the total operating time with the same volume is reduced and, as a result, the total energy costs of the robot and process equipment are reduced, which significantly increases the autonomy. Also, the reduction of deviations and oscillations reduces undesirable loads on the working tool and increases the reliability of its operation.
Table 3 Comparative analysis of the quality indicators for the MR’s speed fuzzy control system under the action of strong step disturbances
| Quality Indicators of the MR’s Speed Control System | |||
| Basic | Hybrid PSO | Hybrid PSO | |
| Quality Indicators | PSO Gbest | with GD | with EKF |
| Disturbances amplitude, N | 600 | 600 | 600 |
| Disturbances action time, s | 0.75 | 0.75 | 0.75 |
| Transient time, s | 0.34 | 0.29 | 0.27 |
| Maximum speed deviation under | 30.05 | 9.45 | 8.31 |
| the action of disturbances, % |
In addition, the procedure of finding the optimal vector of the RB consequents gains P using the considered hybrid PSO techniques required enough small computational and time costs ( – for the hybrid PSO with EKF; – for the hybrid PSO with GD), that confirms their high efficiency. Since all the main computational operations are carried out in the fuzzy systems’ optimization unit on the powerful remote server, the needed processing and storage resources for the implementation of the proposed swarm-based approach can be considered insignificant.
5 Conclusions
The development and research of the advanced approach for optimization of fuzzy control systems for mobile robots with remote control based on bioinspired swarm techniques are presented in this paper. The obtained approach makes it possible to create effective intelligent control systems for mobile robots based on the following principles: hierarchical multi-level control, remote IoT-based control, and fuzzy logic control, as well as intelligent optimization of fuzzy control devices. The applied hybrid swarm (PSO) techniques with elite strategy allow effectively optimizing various parameters of FCSs, finding the optimal solution to the problem, and, at the same time, have a higher convergence rate compared with the basic PSO algorithms.
To evaluate the effectiveness of the proposed advanced approach and hybrid swarm techniques with elite strategy, the optimization process of the FCS for the speed control of the multi-purpose caterpillar MR, which can move on inclined and vertical ferromagnetic surfaces, is carried out in this study. The analysis of the obtained results of computer simulation shows that the hybrid PSO techniques based on the elite strategy with GD and EKF allow optimizing the controller’s RB consequents weights much more efficiently in comparison with the basic PSO algorithm. This is confirmed by the attainment of the lower values of the objective function J at significantly fewer computational costs. Moreover, the MR’s fuzzy control system optimized by both proposed hybrid techniques with elite strategy (hybrid PSO with GD, hybrid PSO with EKF) has higher quality indicators of control than the system optimized by the basic PSO method. In particular, the control system optimized by the hybrid PSO with EKF has the best performance when MR accelerates to a given speed value, as well as the smallest deviations (no more than 8.31%) under the influence of strong step disturbances. Thus, all the research results presented in this paper fully confirm the high efficiency of the proposed advanced approach, as well as the expediency of its application for the optimization of fuzzy control systems for various mobile robots with remote control.
In further work, in a theoretical context, it is planned to develop and study specific algorithms of task scheduling for the group execution of technological operations by robots, taking into account the existing limitations and features of continuous and discrete production processes. In the practical context, it is planned to test the proposed advanced approach in the development and optimization of the real fuzzy control system for mobile robots with remote control. Also, for comparison, it is advisable to consider the possibility of implementing this system based on both IoT and edge computing solutions.
List of Abbreviations
| FCS | fuzzy control system |
| MR | mobile robot |
| PSO | particle swarm optimization |
| FSOU | fuzzy systems’ optimization unit |
| IoT | Internet of things |
| IIoT | Industrial Internet of things |
| IoRT | Internet of robotic things |
| GD | gradient descent |
| EKF | extended Kalman filter |
| AI | artificial intelligence |
References
[1] A. Kor, C. Pattinson, M. Yanovsky, V. Kharchenko, ‘IoT-enabled smart living. Technology for Smart Futures’, in: M. Dastbaz, H. Arabnia and B. Akhgar (Eds.), Cham: Springer, 2018.
[2] B. Ahlgren, M. Hidell, E. Ngai, ‘Internet of Things for Smart Cities: Interoperability and Open Data,’ in IEEE Internet Computing, vol. 20, no. 6, 2016.
[3] A. Topalov, O. Kozlov, Y. Kondratenko, ‘Control Processes of Floating Docks Based on SCADA Systems with Wireless Data Transmission,’ Perspective Technologies and Methods in MEMS Design: Proceedings of the International Conference MEMSTECH 2016. – Lviv-Poljana, Ukraine, pp. 57–61, 2016.
[4] E. Delgado, ‘The Internet of Things: Emergence, Perspectives, Privacy and Security Issues’. New York: Nova Science Publishers, 2015.
[5] S. Dotsenko, O. Illiashenko, S. Kamenskyi, V. Kharchenko, ‘Embedding an integrated security management system into industry 4.0 enterprise management: Cybernetic approach, Studies in Big Data,’ Vol. 84, 2021.
[6] L.F.P. Oliveira, A.P. Moreira, M.F. Silva, ‘Advances in Forest Robotics: A State-of-the-Art Survey,’ Robotics. Vol. 10, 53, 2021.
[7] A. Alherto-Rodriguez, M. Neri-Munoz, J.C. Ramos-Fernandez, M. A. Marquez-Vera, L.E. Ramos-Velasco, O. Diaz-Parra, E. Hernandez-Huerta, ‘Review of control on agricultural robot tractors,’ International Journal of Combinatorial Optimization Problems and Informatics, Sep-Dec 2020, Vol. 11(3), 2020.
[8] S.G. Vougioukas, ‘Annual review of control, robotics, and autonomous systems,’ Agricultural robotics, 2019.
[9] “Smart” harvesters and geologist drones: how digitalization is changing the economy. URL: https://goo.su/atIy3Um.
[10] O. Vermesan and P. Friess, ‘Digitising the Industry – Internet of Things Connecting the Physical, Digital and Virtual Worlds,’ NY: River Publishers, 2016.
[11] S. Jeschke, C. Brecher, H. Song, D. Rawat, ‘Industrial Internet of Things,’ Switzerland: Springer International Publishing, 2017.
[12] Y. P. Kondratenko, O. V. Kozlov, O. S. Gerasin, A. M. Topalov, O. V. Korobko, ‘Automation of control processes in specialized pyrolysis complexes based on Web SCADA Systems’, Intelligent Data Acquisition and Advanced Computing Systems: Technology and Applications (IDAACS): Proceedings of the 9th IEEE International Conference. Bucharest, Romania, volume 1, 2017.
[13] Y. Xiaohua, Zh. Dapeng, Y. Wang, G. Jiajie, L. Kok-Meng, ‘Transmissibility-function-based structural damage detection with tetherless mobile sensors,’ in a book: Bridge Maintenance, Safety, Management and Life-Cycle Optimization, 2010.
[14] Y. Kondratenko, ‘Robotics, automation and information systems: future perspectives and correlation with culture, sport and life science’, in Decision Making and Knowledge Decision Support Systems, Lecture Notes in Economics and Mathematical Systems, in: A. Gil-Lafuente, C. Zopounidis (Eds.), volume 675, Springer International Publishing Switzerland, 2015.
[15] Izonin I., Tkachenko R., Peleshko D., Rak T., Batyuk D. ‘Learning-based image super-resolution using weight coefficients of synaptic connections,’ Proceedings of the International Conference on Computer Sciences and Information Technologies, CSIT 2015, art. no. 7325423, pp. 25–29, 2015.
[16] Y. Kondratenko, O. Kozlov, O. Gerasin, ‘Neuroevolutionary approach to control of complex multicoordinate interrelated plants’, International Journal of Computing, vol. 18, No. 4, 2019.
[17] Kozlov, O. ‘Optimal Selection of Membership Functions Types for Fuzzy Control and Decision Making Systems,’ in Proceedings of the 2nd International Workshop on Intelligent Information Technologies & Systems of Information Security with CEUR-WS, Khmelnytskyi, Ukraine, IntelITSIS 2021, CEUR-WS, Vol-2853, pp. 238–247, 2021.
[18] E. Hernandez, O. Castillo, J. Soria, ‘Optimization of fuzzy controllers for autonomous mobile robots using the grey wolf optimizer,’ 2019 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE), New Orleans, LA, USA, pp. 1–6, 2019.
[19] Y.P. Kondratenko, A.V. Kozlov, ‘Generation of Rule Bases of Fuzzy Systems Based on Modified Ant Colony Algorithms,’ Journal of Automation and Information Sciences, Vol. 51, Issue 3, New York: Begel House Inc., pp. 4–25, 2019.
[20] V.M. Kuntsevich, et al. (Eds), ‘Control Systems: Theory and Applications,’ Series in Automation, Control and Robotics, River Publishers, 2018.
[21] A. Piegat, ‘Fuzzy Modeling and Control,’ vol. 69, Physica, 2013.
[22] Y.P. Kondratenko, O.V. Kozlov, ‘Mathematical Model of Ecopyrogenesis Reactor with Fuzzy Parametrical Identification,’ Recent Developments and New Direction in Soft-Computing Foundations and Applications, Studies in Fuzziness and Soft Computing, Vol. 342, Lotfi A. Zadeh et al. (Eds.). Berlin, Heidelberg: Springer-Verlag, pp. 439–451, 2016.
[23] Z. Jiang, et al. ‘Optimization of fuzzy membership function of runoff forecasting error based on the optimal closeness,’ Journal of Hydrology, Vol. 570, pp. 51–61, 2019.
[24] O. Kozlov, G. Kondratenko, Z. Gomolka, Y. Kondratenko, ‘Synthesis and Optimization of Green Fuzzy Controllers for the Reactors of the Specialized Pyrolysis Plants,’ Kharchenko V., Kondratenko Y., Kacprzyk J. (eds) Green IT Engineering: Social, Business and Industrial Applications, Studies in Systems, Decision and Control, Vol. 171, Springer, Cham, pp. 373–396, 2019.
[25] J. P. Fernández, et al. ‘Coevolutionary Optimization of a Fuzzy Logic Controller for Antilock Braking Systems under Changing Road Conditions,’ IEEE Transactions on Vehicular Technology, 70, 2 pp. 1255–1268, 2021.
[26] C. Van Kien, N.N. Son, H.P.H. Anh, ‘Identification of 2-DOF pneumatic artificial muscle system with multilayer fuzzy logic and differential evolution algorithm,’ 2017 12th IEEE Conference on Industrial Electronics and Applications (ICIEA), Siem Reap, pp. 1264–1269, 2017.
[27] J. M. Cruz-Duarte, et al. ‘Hyper-Heuristics to customise metaheuristics for continuous optimization,’ Swarm and Evolutionary Computation, Vol. 66, 100935, 2021.
[28] D. Simon, ‘Evolutionary Optimization Algorithms: Biologically Inspired and Population-Based Approaches to Computer Intelligence,’ John Wiley & Sons, 2013.
[29] R. Kabir, Y. Watanobe, K. Nakamura, R. Islam, K. Naruse, ‘An efficient cloud framework for multi-robot system management,’ Frontiers in Artificial Intelligence and Applications, 337, pp. 605–617, 2021.
[30] Y. Kondratenko, et al.’ Inspection mobile robot’s control system with remote IoT-based data transmission,’ Journal of Mobile Multimedia. Special issue “Mobile Communication and Computing for Internet of Things and Industrial Automation”, Vol. 17, Is. 4, pp. 499–522, 2021.
[31] M. Balogh et al., ‘Cloud-Controlled Autonomous Mobile Robot Platform,’ 2021 IEEE 32nd Annual International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), pp. 1–6, 2021.
[32] M. Bottone, F. Palumbo, G. Primiero, F. Raimondi, R. Stocker, ‘Implementing virtual pheromones in BDI robots using MQTT and Jason’, 5th IEEE International Conference on Cloud Networking. Pisa, Italy, 2016.
[33] X. Chen, et al., ‘Cloud-based robot path planning in dynamic environments,’ 2021 IEEE International Conference on Real-Time Computing and Robotics, RCAR, pp. 1355–1360, 2021.
[34] P.R.M. de Araujo, R.G. Lins, ‘Cloud-based approach for automatic CNC workpiece origin localization based on image analysis,’ Rob. Comput. Integr. Manuf. 68, 102090, 2021.
[35] S. Sechenev, et al., ‘Development of a Design Methodology for Cloud Distributed Control Systems of Mobile Robots,’ Journal of Sensor Actuator Networks, 11, 1. pp. 1–18, 2022.
[36] M. Afrin, et al., ‘Resource Allocation and Service Provisioning in Multi-Agent Cloud Robotics: A Comprehensive Survey,’ in IEEE Communications Surveys & Tutorials, vol. 23, no. 2, pp. 842–870, 2021.
[37] K.-T. Song, Y.-X. Sun, ‘Coordinating multiple mobile robots for obstacle avoidance using cloud computing,’ Asian Journal of Control, 23(5), pp. 1–12, 2020.
[38] R. Zhao, L. Zhou, ‘Path planning and real time positioning algorithm of intelligent robot based on cloud computing,’ International Journal of System Assurance Engineering and Management, pp. 1–16, 2022.
[39] G. Guerra, et al., ‘Multi-robot System for Collaborative Work Equipped with Trajectory Planning over IoT Architecture,’ in a book: Advances in Automation and Robotics Research, pp. 217–227, 2022.
[40] D. Elayaraja, S. Ramabalan, ‘Fuzzy Logic Control of Low Cost Obstacle Climbing Robot,’ Applied Mechanics and Materials, Vols. 592–594, pp. 2150–2154, 2014.
[41] G. Thomas, P. Lozovyy, D. Simon, ‘Fuzzy Robot Controller Tuning with Biogeography-Based Optimization,’ Modern Approaches in Applied Intelligence: 24th International Conference on Industrial Engineering and Other Applications of Applied Intelligent Systems, IEA/AIE 2011, Syracuse, NY, USA, June 28 – July 1, Proceedings, Part II, pp. 319–327, 2011.
[42] Ju. Xiao, et al., ‘Fuzzy Controller for Wall-Climbing Microrobots,’ IEEE Transactions on Fuzzy Systems, 12(4), pp. 466–480, 2004.
[43] J. Zhao, et al., ‘The fuzzy PID control optimized by genetic algorithm for trajectory tracking of robot arm,’ 2016 12th World Congress on Intelligent Control and Automation (WCICA), Guilin, China, pp. 556–559, 2016.
[44] Ch. Chen, et al., ‘A genetic algorithm-optimized fuzzy logic controller to avoid rear-end collisions,’ Journal of advanced transportation, Vol. 50, pp. 1735–1753, 2016.
[45] M.A. Elaziz, S. Mirjalili, ‘A hyper-heuristic for improving the initial population of whale optimization algorithm,’ Knowledge-Based Systems, 172, pp. 42–63, 2019.
[46] A.-F. Attia, R. A. El Sehiemy, H.M. Hasanien, ‘Optimal power flow solution in power systems using a novel Sine Cosine algorithm,’ International Journal of Electrical Power & Energy Systems, 99, pp. 331–343, 2018.
[47] H. Faris, et al., ‘An efficient binary salp swarm algorithm with crossover scheme for feature selection problems,’ Knowledge-Based Systems, 154, pp. 43–67, 2018.
[48] S. Muthukaruppan, M. J. Er, ‘A hybrid particle swarm optimization based fuzzy expert system for the diagnosis of coronary artery disease,’ Expert Systems with Applications, 39(14), pp. 11657–11665, 2012.
[49] J. Radosavljević, et al., ‘Optimal power flow using a hybrid optimization algorithm of particle swarm optimization and gravitational search algorithm,’ Electric Power Components and Systems, 43(17), pp. 1958–1970, 2015.
[50] T. Jayabarathi, et al., ‘Economic dispatch using hybrid grey wolf optimizer,’ Energy, 111, pp. 630–641, 2016.
[51] A. Yildiz, M. Polat, M. T. Özdemir, ‘Design Optimization of Inverted Switched Reluctance Motor using Ant Colony Optimization Algorithm,’ in: 2018 International Conference on Artificial Intelligence and Data Processing (IDAP), Malatya, Turkey, pp. 1–6, 2018.
[52] X.-T. Dang, et al. ‘A Genetic Algorithm based Pilot Assignment strategy for Cell-Free massive MIMO system,’ in: 2020 IEEE Eighth International Conference on Communications and Electronics (ICCE), Phu Quoc Island, Vietnam, pp. 93–98, 2021.
[53] J. Zhu, et al. ‘Fuzzy Logic Control Optimized by Artificial Immune System for Building Thermal Condition,’ Siarry P., Idoumghar L., Lepagnot J. (eds) Swarm Intelligence Based Optimization, ICSIBO 2014, Lecture Notes in Computer Science, Vol. 8472. Springer, Cham, pp. 42–49, 2014.
[54] M.D.F. Morais, et al. ‘Discrete differential evolution metaheuristics for permutation flow shop scheduling problems,’ Computers & Industrial Engineering, Vol. 166, 107956, 2022.
[55] G. Yavuz, B. Durmuş, D. Aydın, ‘Artificial Bee Colony Algorithm with Distant Savants for constrained optimization,’ Applied Soft Computing., Vol. 116, 108343, 2022.
[56] S. Vaneshani, H. Jazayeri-Rad, ‘Optimized Fuzzy Control by Particle Swarm Optimization Technique for Control of CSTR,’ International Journal of Electrical and Computer Engineering, 5, 11, pp. 1243–1248, 2011.
[57] B. Yang, et al. ‘Discrete bacterial foraging optimization for community detection in networks,’ Future Generation Computer Systems, Vol. 128, pp. 192–204, 2022.
[58] M. Huang, et al. ‘An Improved Biogeography-Based Optimization Algorithm for Flow Shop Scheduling Problem,’ in: 2020 IEEE 8th International Conference on Computer Science and Network Technology (ICCSNT), Dalian, China, pp. 59–63, 2020.
[59] S. Mirjalili, S. M. Mirjalili, A. Lewis, ‘Grey wolf optimizer,’ Adv. Eng. Software, 69, pp. 46–61, 2014.
[60] R. Jabłoński, T. Bøezina (Eds.), ‘Mechatronics. Recent Technological and Scientific Advances,’ Springer-Verlag Berlin Heidelberg, 2012.
[61] Y.P. Kondratenko, O.V. Kozlov, O.V. Korobko, ‘Two Modifications of the Automatic Rule Base Synthesis for Fuzzy Control and Decision Making Systems,’ J. Medina et al. (Eds), Information Processing and Management of Uncertainty in Knowledge-Based Systems: Theory and Foundations, 17th International Conference, IPMU 2018, Cadiz, Spain, Proceedings, Part II, CCIS 854, Springer International Publishing AG, pp. 570–582, 2018.
[62] Y.P. Kondratenko, O.V. Korobko, O.V. Kozlov, ‘Synthesis and Optimization of Fuzzy Controller for Thermoacoustic Plant,’ Lotfi A. Zadeh et al. (Eds.) Recent Developments and New Direction in Soft-Computing Foundations and Applications, Studies in Fuzziness and Soft Computing, Vol. 342, Berlin, Heidelberg: Springer-Verlag, pp. 453–467, 2016.
[63] N. Ben, S. Bouallègue, J. Haggège, ‘Fuzzy gains-scheduling of an integral sliding mode controller for a quadrotor unmanned aerial vehicle,’ Int. J. Adv. Comput. Sci. Appl., Vol. 9, no. 3, pp. 132–141, 2018.
[64] Y.P. Kondratenko, A.V. Kozlov, ‘Parametric optimization of fuzzy control systems based on hybrid particle swarm algorithms with elite strategy,’ Journal of Automation and Information Sciences, Vol. 51, Issue 12, New York: Begel House Inc., pp. 25–45, 2019.
[65] S. Kosanam, D. Simon, ‘Fuzzy membership function optimization for system identification using an extended Kalman filter,’ Fuzzy Information Processing Society, pp. 459–462, 2006.
[66] Y.P. Kondratenko, O.V. Korobko, O.V. Kozlov, ‘Frequency Tuning Algorithm for Loudspeaker Driven Thermoacoustic Refrigerator Optimization,’ Lecture Notes in Business Information Processing: Modeling and Simulation in Engineering, Economics and Management. – K. J. Engemann, A. M. Gil-Lafuente, J. M. Merigo (Eds.), Vol. 115, Berlin, Heidelberg: Springer-Verlag, pp. 270–279, 2012.
[67] Taranov, M.O., et al. ‘Models of Robot’s Wheel-Mover Behavior on Ferromagnetic Surfaces,’ International Journal of Computing, Vol. 17, Issue 1, pp. 8–14, 2018.
[68] Taranov, M.O., et al. ‘Simulation of Robot’s Wheel-Mover on Ferromagnetic Surfaces,’ Proc. 2017 IEEE 9th Int. Conf. IDAACS. Bucharest, Romania, vol. 1, Sept. 21–23, pp. 283–288, 2017. DOI: 10.1109/IDAACS.2017.8095091
[69] Taranov, M.O., et al. ‘Advanced approaches to reduce number of actors in a magnetically-operated wheel-mover of a mobile robot,’ Proceedings of 13th International Conference Perspective Technologies and Methods in MEMS Design, MEMSTECH 2017, pp. 96–100, 2017. DOI: 10.1109/MEMSTECH.2017.7937542
[70] O. Gerasin, O. Kozlov, G. Kondratenko, J. Rudolph, Y. Kondratenko. ‘Neural controller for mobile multipurpose caterpillar robot,’ Proceedings of the 10th IEEE International Conference Intelligent Data Acquisition and Advanced Computing Systems: Technology and Applications (IDAACS), volume 1, Metz, France, pp. 222–227, 2019.
[71] Y. Kondratenko, et al. ‘Slip Displacement Sensors For Intelligent Robots: Solutions and Models,’ in Proc. of the 2013 IEEE 7th Int. Conf. on Intelligent Data Acquisition and Advanced Computing Systems (IDAACS). Berlin, vol. 2, Sept. 12–14, pp. 861–866, 2013. DOI: 10.1109/IDAACS.2013.6663050.
[72] R. Duro, et al. (Eds). ‘Advances in intelligent robotics and collaborative automation,’ Book Series: River Publishers Series in Automation Control and Robotics, Volume: 1, 2015. doi: 10.13052/rp-9788793237049.
Biographies

Oleksiy Kozlov is a Ph.D., Associate Professor, Doctorant, and Associate Professor of the Department of Intelligent Information Systems at Petro Mohyla Black Sea National University (PMBSNU), Ukraine. He has received a master degree in electromechanics (2011) from Admiral Makarov National University of Shipbuilding and a Ph.D. degree in control processes automation (2014) from Odessa National Polytechnic University. Since 2011 took part in the implementation of a number of international and state projects related to the automation of complex industrial plants, information technologies, intelligent control systems, robotics, and the Internet of things. His research interests include automation, intelligent information and control systems, fuzzy logic, bioinspired optimization techniques, and robotics.

Yuriy Kondratenko is a Doctor of Science, Professor, Honour Inventor of Ukraine (2008), Corr. Academician of Royal Academy of Doctors (Barcelona, Spain), Head of the Department of Intelligent Information Systems at Petro Mohyla Black Sea National University (PMBSNU), Ukraine. He has received (a) a Ph.D. (1983) and Dr.Sc. (1994) in Elements and Devices of Computer and Control Systems from Odessa National Polytechnic University, (b) several international grants and scholarships for conducting research at Institute of Automation of Chongqing University, P.R.China (1988–1989), Ruhr-University Bochum, Germany (2000, 2010), Nazareth College and Cleveland State University, USA (2003), (c) Fulbright Scholarship for researching in USA (2015/2016) at the Dept. of Electrical Engineering and Computer Science in Cleveland State University. Research interests include robotics, automation, sensors and control systems, intelligent decision support systems, and fuzzy logic.

Oleksandr Skakodub is a Ph.D. student in the Department of Intelligent Information Systems at Petro Mohyla Black Sea National University (PMBSNU), Ukraine. He received a master degree in Computerized control systems from the Admiral Makarov National University of Shipbuilding in 2019. Since 2019 took part in the implementation of the state project related to the mobile robot’s remote control system development. His main research interests include computer control systems, sensor systems, fuzzy logic, intelligent robotic devices, and measurement systems.

Oleksandr Gerasin is a Ph.D., Associate Professor of the Computerized control systems department of Admiral Makarov National University of Shipbuilding, Ukraine. He has gained bachelor (2012) and master (2014) diplomas in electromechanics, as well as a Ph.D. degree diploma in Automation of Control Processes in 2020. From February 2015 to September 2020 has been involved in different international and state programs related to control and monitoring systems development, robotics, and Internet of Things implementation. His research interests include mobile robotics, sensor systems, industrial automation, artificial intelligence, mathematical and computer modeling of technical plants.

Andriy Topalov is a Ph.D., Associate Professor at Admiral Makarov National University of Shipbuilding, Ukraine. He is a specialist in electrical engineering and got a master diploma in 2014. In 2020 obtained a Ph.D. degree in Computer Systems and Components. He worked in the framework of international scientific university cooperation during the implementation of international projects with the European Union: TEMPUS (Cabriolet), Erasmus (Aliot), and DAAD-Ostpartnerschaftsprogramm (a project with the University of Saarland, Germany). His research interests include computer control systems, sensor systems, fuzzy logic, intelligent robotic devices, and measurement systems.
Journal of Mobile Multimedia, Vol. 19_3, 839–876.
doi: 10.13052/jmm1550-4646.1939
© 2023 River Publishers