Intelligent IoT-based Control System of the UAV for Meteorological Measurements
Oleksiy Kozlov1,*, Yuriy Kondratenko1, 2 and Oleksandr Skakodub1
1Intelligent Information Systems Department, Petro Mohyla Black Sea National University, Mykolaiv, Ukraine
2Institute of Artificial Intelligence Problems of MES and NAS of Ukraine, Kyiv, Ukraine
E-mail: kozlov_ov@ukr.net; y_kondrat2002@yahoo.com; aleksandrskakodub1996@gmail.com
*Corresponding Author
Received 29 October 2023; Accepted 18 February 2024
Abstract
This study focuses on the creation and examination of an intelligent automated control system for UAVs utilized in meteorological measurements based on the Internet of Things (IoT) and mobile technologies. The proposed system enables the achievement of commendable flight control standards for UAVs during meteorological data gathering, thereby markedly enhancing the overall effectiveness of meteorological stations. Notably, this system is constructed on the foundation of three integrated principles: (a) a hierarchical two-level approach for control and data collection based on IoT and mobile technologies, (b) a straightforward and dependable fuzzy logic control characterized by high performance, and (c) the effective optimization of fuzzy control components through the application of bio-inspired multi-agent computing techniques. To assess the performance of the suggested intelligent system, this study involves the creation and bioinspired optimization of the climb speed fuzzy controller. Subsequent simulation experiments are conducted to evaluate the automatic control of UAV’s flight processes under different modes. The analysis of the simulation results indicates that the developed system, utilizing fuzzy control, exhibits superior efficiency and higher quality metrics when compared to existing counterparts, especially in diverse flight scenarios such as uniform climbing, gradual approach to designated altitude levels, and smooth landing during meteorological measurements.
Keywords: UAV control system, meteorological measurements, climb speed control, intelligent control, fuzzy controller, Internet of Things, mobile technologies.
1 Introduction
Unmanned Aerial Vehicles (UAVs), commonly known as drones, have become pivotal across a multitude of industries due to their versatility and capacity to perform tasks that were once logistically challenging or even impossible [1]. Their significance extends far beyond monitoring tasks, encompassing a broad spectrum of applications. In the realm of environmental conservation and monitoring, UAVs play a vital role [2]. They provide a bird’s-eye view of ecosystems, allowing researchers to track wildlife populations, monitor deforestation, and assess the health of ecosystems. This aids in the formulation of conservation strategies and helps mitigate the impacts of human activities on natural habitats. In the field of infrastructure and construction, UAVs have revolutionized surveying and mapping processes [3]. They can quickly and accurately create 3D models of construction sites, monitor progress, and identify potential issues, all of which contribute to streamlined project management and cost savings. In urban planning, drones aid in city modeling and traffic analysis, enabling more efficient city designs and transportation systems. In emergency response and disaster management, UAVs are invaluable tools [4, 5]. They can swiftly assess damage in hard-to-reach areas, locate survivors, and identify potential hazards, which significantly enhances the effectiveness and safety of response efforts. Furthermore, in industries like energy, drones are used for inspecting infrastructure such as power lines, wind turbines, and oil rigs [6, 7]. This reduces the need for risky manual inspections and helps ensure the reliability and safety of energy production. Moreover, another key area where UAVs have made a significant impact is agriculture [8, 9]. With the ability to collect precise data on crop health, soil conditions, and irrigation needs, drones have enabled farmers to make informed decisions, optimize resource allocation, and ultimately increase crop yields. This has not only improved food security but also reduced the environmental footprint of agriculture through more efficient resource utilization.
Looking ahead, the prospects for UAVs are promising. As technology advances, drones are becoming more sophisticated, with capabilities for tasks like autonomous flight, long-endurance missions, and improved sensing capabilities. In the transportation sector, the concept of urban air mobility is gaining traction, with the potential for drones to revolutionize urban transportation and logistics [10, 11]. This includes applications like air taxis, medical supply delivery, and rapid transportation of goods. In general, the importance of unmanned aerial vehicles in today’s world is multi-faceted and spans a wide array of industries. Their prospects are vast, promising even greater advancements in efficiency, safety, and accessibility. However, addressing the challenges associated with their integration into society is crucial to ensuring that the benefits they offer are maximized while minimizing potential risks. With thoughtful planning and responsible implementation, UAVs have the potential to transform various aspects of our lives, making them a cornerstone of modern technology.
The use of drones when performing meteorological measurements deserves special attention [12–14]. In this field, UAVs have become invaluable tools, revolutionizing the way we collect critical atmospheric data. Traditional meteorological measurements are usually taken from fixed ground stations, satellites and weather balloons. While these techniques provide valuable information, UAVs offer unique advantages that greatly enhance our ability to monitor and understand weather conditions. One of the key advantages of using UAVs for meteorological measurements is their ability to access regions of the atmosphere that are difficult or dangerous for humans to reach. This includes flying through turbulent or extreme weather conditions, as well as conducting measurements in remote or hazardous locations. UAVs equipped with specialized sensors can ascend to high altitudes or descend into lower atmospheric layers, providing a more comprehensive view of the vertical profile of the atmosphere. Furthermore, UAVs offer a level of flexibility and agility that surpasses traditional methods. They can be rapidly deployed to respond to evolving weather events or to investigate specific atmospheric phenomena. This agility is especially critical in situations where rapid data collection is essential for accurate weather forecasting, emergency response, or disaster management. In addition to their versatility, UAVs can be equipped with a diverse array of meteorological sensors, allowing for precise and multi-dimensional data collection. These sensors can measure parameters such as temperature, humidity, pressure, wind speed and direction, as well as aerosol and gas concentrations. This wealth of information enables meteorologists to create high-resolution models and forecasts, leading to more accurate and timely weather predictions.
Moreover, UAVs facilitate the development of localized weather stations [15]. These stations can be strategically positioned to monitor specific microclimates, urban heat islands, or other localized weather phenomena. This granular data is invaluable for applications like urban planning, agriculture, and environmental monitoring, where detailed weather information at a small scale is essential. Thus, the use of unmanned aerial vehicles for meteorological measurements and stations represents a significant advancement in our ability to monitor and understand the Earth’s atmosphere. Their versatility, agility, and capacity for precise data collection make them invaluable assets for meteorologists and weather researchers. As technology continues to advance, UAVs are poised to play an increasingly pivotal role in enhancing our ability to predict and respond to weather events, ultimately contributing to greater public safety and improved quality of life.
One critical aspect that underpins the functionality and capabilities of UAVs in meteorological measurements is their remote monitoring and control systems, which incorporate a sophisticated array of sensors, wireless technologies, and integration with the Internet of Things (IoT) and mobile technologies [16, 17]. These technological synergies amplify the capabilities of UAVs, allowing them to collect vital atmospheric data with unprecedented accuracy and timeliness. Sensors equipped on UAVs for meteorological purposes play a pivotal role in data acquisition. These sensors, including high-resolution temperature, humidity, and pressure gauges, as well as specialized instruments for air quality assessments, enable UAVs to capture an extensive array of atmospheric parameters. The integration of cutting-edge sensors not only ensures the accuracy of collected data but also empowers meteorologists to gain deeper insights into weather patterns and phenomena. Wireless technologies serve as the lifeline connecting UAVs with ground control stations. This real-time data transmission capability enables meteorologists to receive and analyze information without delay, allowing for swift adjustments to flight plans or data collection strategies based on evolving atmospheric conditions. Moreover, wireless communication facilitates seamless coordination between multiple UAVs deployed for simultaneous measurements, enabling a more comprehensive assessment of the meteorological landscape.
The integration of UAVs into the IoT ecosystem is further enriched by the incorporation of mobile technologies and devices, significantly enhancing their capabilities for meteorological measurements. Through seamless connectivity with IoT, UAVs can establish interfaces with an extensive network of sensors, weather stations, and mobile devices. This integration forms a dynamic and interconnected system, facilitating UAVs in exchanging data not only with ground-based stations and satellites but also with various IoT-enabled and mobile devices. This synergy empowers UAVs to contribute to a more comprehensive and real-time meteorological data collection process. The utilization of mobile technologies ensures a broader reach and accessibility, enabling UAVs to efficiently communicate and share data with a diverse array of devices. The collaborative network formed by UAVs, ground-based stations, satellites, and mobile devices enhances the accuracy, timeliness, and scope of the information collected during meteorological missions. Moreover, the assimilation of UAV-derived data into broader weather forecasting models becomes even more seamless with the inclusion of mobile technologies. This comprehensive integration leverages the strengths of UAVs, IoT, and mobile devices to create a synergistic framework that optimizes the collection, transmission, and utilization of meteorological data in an increasingly interconnected world.
This convergence of technologies has transformative implications for meteorological research and forecasting. UAVs equipped with advanced remote control systems, state-of-the-art sensors, IoT connectivity, and mobile technologies can be deployed to monitor dynamic weather patterns in real time. This capability is particularly crucial in situations where rapid data collection and analysis are imperative for accurate weather predictions, early warning systems, and disaster preparedness.
However, when using modern IoT-based UAVs systems for meteorological measurements, along with the difficulties of ensuring confidentiality and security of remote data transmission, there is a problem of implementing effective control of basic processes in automatic mode. Since the drones’ flight processes in various modes are quite complex, traditional automatic control algorithms in many cases do not allow achieving the desired results and have significant limitations. This is because these processes depend on many non-stationary, non-linear parameters with uncertainties that are determined by changing characteristics of the UAV and the environment, weather and climatic conditions, etc. At the same time, cutting-edge research shows that intelligent algorithms are increasingly being implemented in UAVs’ control systems [18, 19]. Moreover, fuzzy logic algorithms are especially effective when integrated into IoT-based drones’ control systems as they harness the power of imprecise and uncertain data to make informed, context-aware decisions, mirror human thinking processes, and demonstrate prowess in addressing the complexities and uncertainties [20, 21].
This study focuses on the development and research of the advanced IoT-based fuzzy control system of the UAV for meteorological measurements. The remainder of the paper is structured as follows. Section 2 provides a succinct overview of the relevant literature in the studied domain and outlines the primary objective of this research. Moving forward, Section 3 elaborates on the step-by-step progression of creating the innovative IoT-based fuzzy control system that is being proposed. Subsequently, Section 4 showcases the outcomes obtained from optimization, simulation and evaluating the efficiency of the devised fuzzy system in a specific context. Lastly, Section 5 concludes the work and suggests potential pathways for forthcoming research.
2 Brief Literature Review
In recent years, research in unmanned aerial vehicles for meteorological measurements has witnessed significant strides, with a focus on enhancing their capabilities for more accurate and comprehensive data collection [12, 22–24]. One prominent research direction has been the refinement of sensor technology for meteorological applications [25–27]. There has been a concerted effort to develop specialized sensors that can capture a wide range of atmospheric parameters with high precision. These include sensors for temperature, humidity, pressure, wind speed and direction, as well as more advanced instruments for measuring parameters like aerosols and gas concentrations. Additionally, advancements in sensor miniaturization and integration have enabled UAVs to carry a diverse suite of sensors, allowing for multi-dimensional data collection during flights. This progress is vital in improving the quality and resolution of meteorological data gathered by UAVs.
Another critical research focus is on the development of sophisticated data assimilation and modeling techniques [13, 28–30]. Integrating data collected from UAVs into meteorological models is essential for enhancing the accuracy of weather forecasts and climate models. Researchers are working on methodologies to effectively integrate UAV-derived data with data from other sources, such as ground-based weather stations and satellites. Additionally, advancements in numerical weather prediction models are being pursued to better incorporate high-resolution data from UAVs, leading to more precise and reliable weather forecasts.
Furthermore, there is a strong emphasis on improving UAV endurance and range for extended missions in meteorological research [31–33]. Research in this area is aimed at developing more energy-efficient propulsion systems and exploring alternative power sources, such as solar energy, to increase the operational capabilities of UAVs. Also, investigations into innovative propulsion technologies are conducted, including electric and hybrid systems, as well as exploring advancements in materials and aerodynamics [31]. By extending flight duration and range, UAVs can cover larger geographic areas and provide a more comprehensive view of the atmosphere, ultimately leading to more accurate and timely meteorological data.
Thus, recent research in UAVs for meteorological measurements has centered on enhancing sensor technology, advancing data assimilation techniques, and improving UAV endurance and range. These areas of focus are instrumental in elevating the capabilities of UAVs for meteorological applications, ultimately contributing to more accurate weather predictions and a deeper understanding of atmospheric dynamics. However, in the scientific literature at the moment, insufficient attention is paid to the development and improvement of automatic control systems of drones for meteorological measurements. The design and implementation of advanced IoT-based control systems would enable UAVs to have enhanced decision-making capabilities, allowing them to navigate complex environments, adapt to changing conditions, and perform meteorological measurement tasks with minimal human intervention [34, 35]. This includes the integration of various artificial intelligence [36, 37] and machine learning [38] algorithms to allow the UAV to learn from data and improve its performance over time. As a result, such integration will make it possible to create universal mobile meteorological stations based on UAVs, capable of performing tasks in dynamic and unpredictable conditions.
So, in recent years, there has been a notable shift towards the implementation of intelligent control systems for the automation of UAVs, and among these, systems founded on fuzzy logic have emerged as particularly promising [39–41]. Fuzzy logic control leverages a flexible and adaptive approach to decision-making, allowing for nuanced responses to complex and uncertain environments [42–44]. Unlike traditional binary logic, which relies on precise, yes-or-no conditions, fuzzy logic enables UAVs to navigate through dynamic and rapidly changing scenarios with a degree of subtlety and adaptability that is essential for real-world applications. One of the key advantages of fuzzy logic-based control systems is their ability to handle imprecise or uncertain information. In real-world environments, where factors like wind gusts, sensor noise, and variable terrain can introduce uncertainties, the rigid logic of traditional control systems can be limiting. Fuzzy logic, on the other hand, excels at processing and reasoning with imprecise data, enabling UAVs to make informed decisions even in less-than-ideal conditions [45–47]. This adaptability is crucial in applications ranging from precision agriculture, where UAVs must respond to ever-changing crop conditions, to disaster response, where rapidly evolving situations demand quick and adaptable decision-making. Furthermore, fuzzy logic control systems offer a degree of interpretability and transparency in decision-making [48]. This is essential for building trust in autonomous systems, particularly in industries where safety and accountability are paramount. Engineers and operators can understand and fine-tune the rule sets that govern the UAV’s behavior, providing a level of human oversight while still harnessing the benefits of automation. As UAVs continue to evolve and become integral to various industries, the intelligent control systems, particularly those based on fuzzy logic, represent a significant step forward in ensuring safe, reliable, and adaptable operations.
Moreover, bio-inspired multi-agent approaches have shown great promise in creating highly efficient fuzzy control systems for UAVs [20, 35]. Among these, algorithms of ant colony optimization (ACO) [49], artificial bee colony (ABC) [50], particle swarm optimization (PSO) [51], bacterial foraging optimization (BFO) [52], and grey wolf optimization (GWO) [53] have proven to be particularly effective for solving diverse search problems. These bio-inspired methods offer several advantages and appealing features: they excel in avoiding local minima compared to conventional optimization techniques, employ derivation-free mechanisms, maintain flexibility and relative simplicity in their basic procedures, and demonstrate easy adaptability to a wide range of real-world optimization challenges. Additionally, they can be seamlessly hybridized with various types of local search techniques, allowing for a rational integration of global and local search strategies [54]. This fusion leads to the development of specific hybrid methods that exhibit improved efficiency in locating global optima during the optimization process [55–57].
Therefore, it is advisable to create an IoT-based automatic control system for UAVs employed in meteorological measurements by harnessing the intelligent principles of fuzzy logic and bio-inspired multi-agent computing. This approach guarantees the overall enhancement of efficiency for meteorological stations, more accurate weather predictions and a deeper understanding of atmospheric dynamics.
Hence, the primary objective of this paper is the development and effectiveness study of the intelligent control system of the UAV for meteorological measurements that integrates principles of IoT, fuzzy logic and bio-inspired multi-agent computing.
3 Development of an Intelligent IoT-based Control System of the UAV for Meteorological Measurements
3.1 Main Tasks and Designing Principles
The main purpose of a UAV for meteorological measurements is to take off at the right time, rise to a predetermined altitude, take measurements of all the necessary atmospheric parameters and land at the initial site. In this case, operations can be performed to measure all parameters with a certain altitude step while uniformly climbing to a given altitude value, or to take all sensor readings at a certain altitude during a certain period of time. Also, sensor readings can be taken in uniform increments while descending on the way back. Herewith, the main measurement tasks include measuring such atmospheric parameters as temperature, pressure, humidity, wind speed and direction, presence/absence of precipitation, and presence/absence of clouds. In most cases, these parameters should be measured using appropriate sensors once at each specific altitude value during a uniform climb or descent (for example, every 50 meters when climbing from 0 to 1000 meters, as well as when further descending to 0 meters) to determine the distribution pattern of the values of the main quantities over altitude. Also, if required, these parameters can be measured at one fixed altitude for a certain period of time with a given frequency (for example, at an altitude of 500 meters for 10 minutes with sensor readings taken every 10 seconds) to determine the dynamics of changes in the values of the main quantities over time at one fixed point. Wherein, all measured values of atmospheric parameters must be transmitted in real time through a remote server to a ground-based meteorological station for further processing, analysis and storage.
Moreover, to ensure the fulfillment of all the above measurement tasks, it is necessary to perform the following flight tasks: take-off; climbing at a given speed with constant values of horizontal coordinates; descending with a given speed at constant values of horizontal coordinates; smooth approach to a fixed altitude value in the final stage of the climb; holding at a given point and a fixed altitude; smooth landing. Thus, to successfully perform all the presented measurement and flight tasks, which together are quite complicated, it is necessary to design a highly efficient intelligent IoT-based control system.
In turn, the proposed by the authors intelligent system for automatic control of the UAV for meteorological measurements should be created based on the three main principles: (1) hierarchical two-level control and data acquisition based on IoT and mobile technologies; (2) simple and reliable fuzzy logic control with high performance; (3) efficient optimization of fuzzy control devices based on bio-inspired multi-agent computing.
In turn, hierarchical two-level IoT-based control and data acquisition represent a sophisticated fusion of control strategies and technological advancements in the context of meteorological measurements. This principle integrates hierarchical control, wherein tasks are divided into local and higher-level optimization responsibilities, with the transformative capabilities of remote control and data acquisition based on IoT and mobile technologies. In this framework, localized sensors (of various meteorological quantities and basic parameters characterizing the flight state of the UAV) and actuators (UAV’s rotor propulsors) operate at the lower level, collecting real-time data and executing immediate actions to address on-field dynamics. Simultaneously, the higher level, located remotely at a ground weather station, focuses on holistic optimization strategies derived from aggregated data insights. This hierarchical organization maximizes operational efficiency, enabling agile responses to evolving conditions while also facilitating strategic decision-making driven by a broader perspective.
At the core of this approach lies the power of the Internet of Things, which revolutionizes UAV control by fostering a network of interconnected devices. The integration of IoT technologies empowers UAV operators with remote monitoring, control, and data-driven insights. By leveraging real-time data streams from sensors, and other IoT-enabled devices, the upper level gains comprehensive visibility into critical parameters of weather patterns, flight altitude and speed, etc. This holistic view enables precise control, efficient resource allocation, and predictive analytics, resulting in enhanced general efficiency of meteorological stations. Hierarchical two-level IoT-based control thus embodies the synergy of hierarchical remote control and data acquisition principles with the transformative potential of IoT, propelling intelligent UAV systems into a realm of unprecedented efficiency and sophistication.
The hierarchical two-level IoT-based control implies the presence of the lower level of local control and the upper level of remote control to ensure successful implementation of the UAV flight process in the real-time mode [16, 17]. In turn, at the lower (local) level of control, stabilization and automatic regulation of the set values of flight altitude, speed and horizontal coordinates is carried out using installed at this level sensors, actuators, and controllers. This level receives data on the set value of flight altitude, speed and horizontal coordinates from the upper level of control and also transmits to it the current real values of these parameters and all measured meteorological parameters via the Internet. Moreover, the intelligent controllers based on fuzzy logic are located at this level along with actuators and sensors installed directly on the UAV, to ensure reliable and uninterrupted conduction of the flight and meteorological measurements in the event of temporary or long-term loss of communication with the upper level of control.
The upper control level includes a remote server, to which all data from lower-level sensors is received via the Internet with subsequent storage, as well as a specialized human-machine interface (HMI) for the operator of the meteorological station [58]. The given HMI allows the operator to remotely monitor all the system’s parameters, set the setpoints for flight altitude, climb and descent speed, as well as horizontal coordinates depending on the operating mode, change the settings of fuzzy controllers, and, if necessary, intervene in the flight control processes in manual mode. This interface can be installed on a computer, tablet or smartphone to provide remote access via the Internet to monitoring and control of the flight and measurement processes to the system’s operator or external experts anywhere in the world and at any time. Also, in emergency cases, SMS messages can be sent to the operator’s phone.
The principle of simple and reliable fuzzy logic control with high performance consists in development and implementation of highly efficient devices for fuzzy control of flight altitude, climb and descent speed, as well as horizontal coordinates. In turn, the high efficiency of fuzzy controllers lies in their exceptional adaptability to complex and uncertain systems, making them a valuable asset in various fields, including automatic control of unmanned aerial vehicles of various types [20, 21, 39]. Fuzzy controllers excel at capturing the nuances of imprecise and non-linear relationships within dynamic environments. By utilizing linguistic variables and intuitive rules, these controllers mimic human decision-making processes, enabling them to effectively handle the vagaries and uncertainties inherent in complex plants [40–42]. Such complex plants may include robotic systems, power plants, chemical industry facilities, alternative energy installations, etc. [48, 59–61]. This adaptability translates into robust performance, allowing fuzzy controllers to provide accurate and responsive control in scenarios where traditional automation approaches may falter. As a result, their efficiency in optimizing UAV’s flight processes, such as spatial coordinates control, positions fuzzy controllers as a powerful tool for enhancing productivity and sustainability in modern practices of meteorological measurements.
First of all, these fuzzy devices must be placed directly on the control object (UAV) to ensure reliable implementation of the flight control process with high performance, regardless of the upper control level. Therefore, the fuzzy controller must be embedded and have a fairly simple rule base to avoid the increase in the cost of hardware implementation of the local level. Thus, in this case, it is advisable to use separate controllers for each coordinate with no more than two or three inputs each to simplify their rule bases.
Finally, the principle of efficient optimization of UAV’s fuzzy control devices of the lower level implies the conduction of parametric or structural optimization procedures by means of bio-inspired multi-agent computing techniques to improve control accuracy, speed and overall performance. These procedures can be carried out both during the initial synthesis of UAV’s fuzzy controllers and in the process of their subsequent operation when it becomes necessary to improve control quality indicators. In turn, the powerful optimization units should be located in the remote web server to speed up the optimization procedures and simplify the hardware of the local level.
3.2 Basic Structure, Human-machine Interface and Hardware Implementation
Taking into account all the above tasks and principles, the hierarchical intelligent UAV’s control system based on IoT and fuzzy logic for meteorological measurements should have a generalized structure, as shown in Figure 1.
In this system, the lower level of local control includes specific sensors for measuring the following atmospheric parameters: temperature, pressure, humidity, wind speed and direction, presence/absence of precipitation, and presence/absence of clouds. Also, at this level, there are sensors necessary to provide flight control of the UAV, including an altitude sensor, the three-axis accelerometer and gyroscope, a GPS module and a laser rangefinder to implement a smooth landing. In addition, this level includes the main UAV’s actuators (rotor propulsors), fuzzy controllers for main controlled variables implemented on the local computer, and video cameras that allow the operator to visually monitor the flying area.
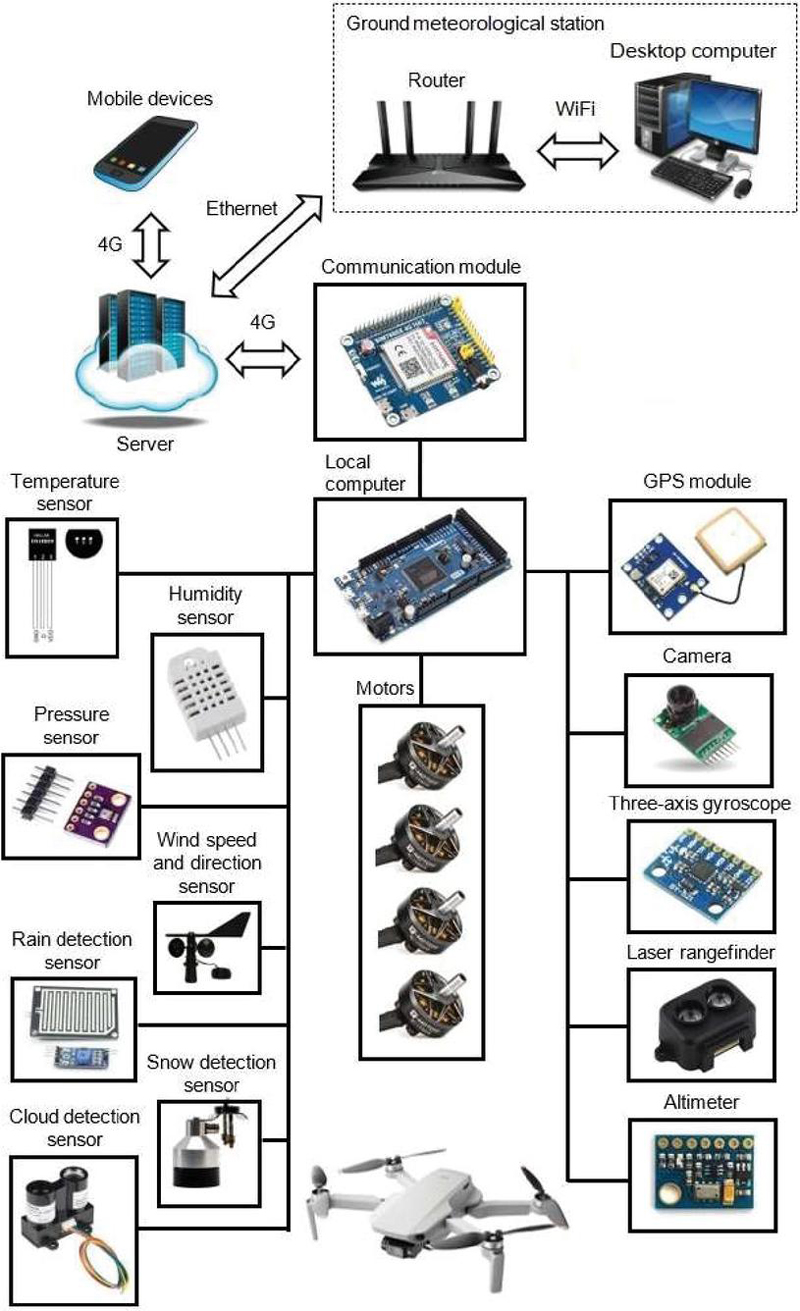
Figure 1 Generalized basic structure of the hierarchical intelligent UAV’s control system based on IoT and fuzzy logic for meteorological measurements.
In turn, the local computer performs the functions of acquisition data from all sensors and transmitting them to the upper level, as well as implementing fuzzy automatic control of the main system variables (altitude, climb speed, and horizontal coordinates) in accordance with the received setpoints from the upper level. To communicate with the upper level of monitoring and control the local computer has the Internet connection organized through a 4G communication module.
At the upper level of control and monitoring, there is a remote server and the ground-based meteorological station that collects and stores all information sent from the lower level. This server can be connected via the Internet to desktop computers, laptops, tablets or smartphones and other mobile devices, which, using an installed specialized HMI allow the operator to monitor all the system’s parameters and implement the control actions of the upper level. Depending on the necessary flight mode to carry out the certain meteorological measurements, the operator must set the setpoints for altitude, climb speed, etc., which the system will subsequently maintain automatically. Moreover, depending on the required quality indicators and at a significant change in the operating conditions, the operator can change the settings of fuzzy controllers (parameters of membership functions of linguistic terms, antecedents and consequents of the rule base, types of aggregation, activation, accumulation and defuzzification procedures) using the certain optimization procedures.
Moreover, external experts with access can also connect to the system from laptops, tablets or smartphones to monitor the key meteorological parameters in the real time mode. At the same time, only the main operator has the functions of setting the necessary setpoints for main controlled variables and adjusting fuzzy controllers.
The human-machine interface developed by the authors for the main desktop computer of the operator of a ground-based meteorological station is presented in Figure 2.
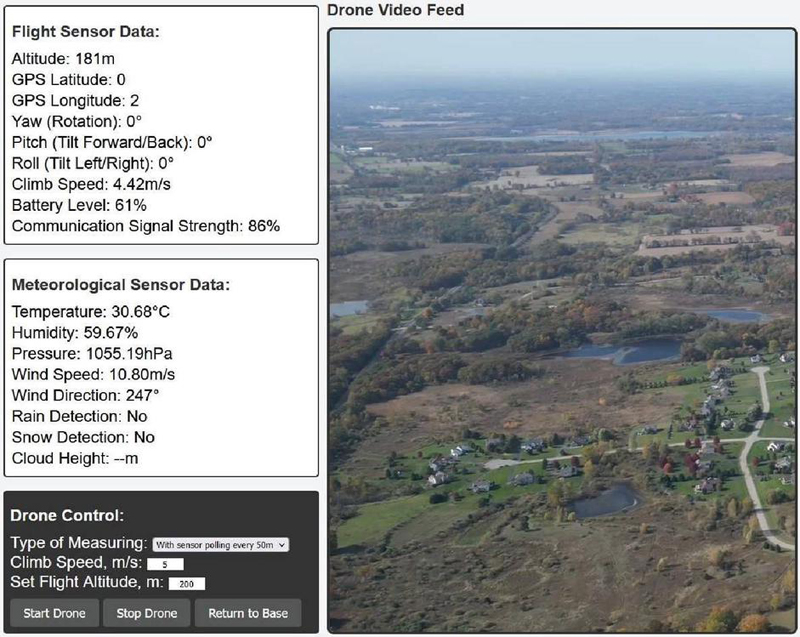
Figure 2 HMI for the main desktop computer.
The given interface (Figure 2) allows the operator to monitor the measured meteorological parameters and main parameters of the UAV’s flight, as well as enter the specified values of the controlled quantities (maximum climbed altitude, climb speed, measurement mode and polling of sensors). It also has buttons to start and stop the flight, as well as return to base if necessary.
In addition, the designed HMI for mobile devices has the form shown in Figure 3. This interface allows external experts to monitor the main parameters of meteorological measurements, as well as the flight parameters of the UAV in real time from anywhere in the world with Internet access. The presented interfaces are meticulously designed and implemented within the PHPStorm integrated development environment. Utilizing a harmonious blend of web programming languages, the platform predominantly incorporates HTML for structuring the content, JavaScript for dynamic interactions and real-time updates, and PHP for server-side data processing and integration. This synergistic confluence of technologies ensures a seamless, user-centric experience, providing real-time telemetry and controls for drone operations. In addition, the developed interfaces can be easily adjusted if it is necessary to make any changes or clarifications in the operation of the proposed system.
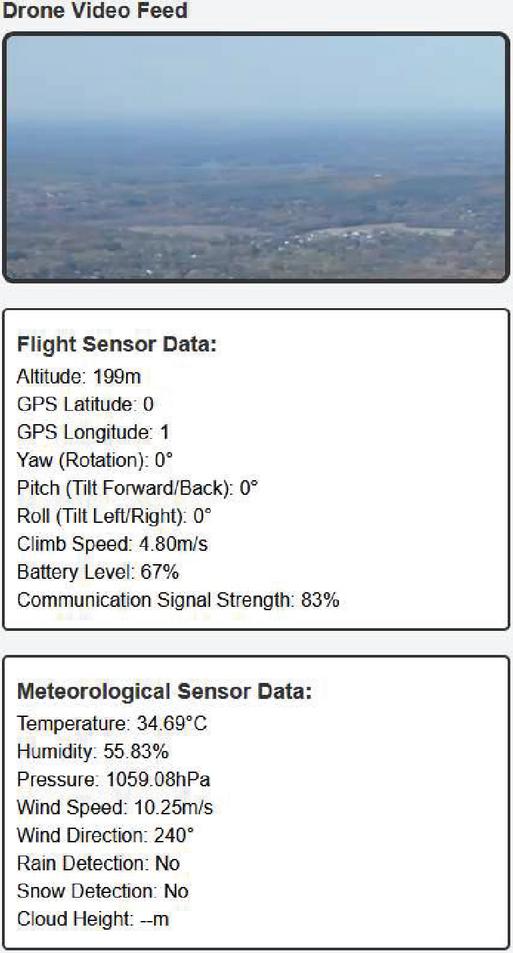
Figure 3 HMI for mobile devices.
For the hardware implementation of the developed hierarchical intelligent UAV’s control system based on IoT and fuzzy logic, the following measuring and control equipment is used:
(a) for carrying out meteorological measurements: temperature sensor DS18B20 (operating range: 55C…125C, accuracy: 0.5C), atmospheric pressure sensor BMP280 (operating range: 300…1100 hPa, accuracy: 1.0 hPa), humidity sensor DHT22 (operating range: 0…100%, accuracy: 2%), wind speed and direction sensor Peet Bros Anemometer (speed operating range: 0–100 m/s, speed accuracy: 0.5 m/s, direction operating range: 0–360, direction accuracy: 3), rain detection sensor RainDrop Sensor, snow detection sensor Snow Depth Sensor SR50A, cloud detection sensor LiDAR-Lite v3;
(b) for carrying out flight support: altimeter MS5611 (operating range: 0 m…10000 m, accuracy: 0.1 m), three-axis gyroscope and accelerometer MPU-6050, Neo-6M GPS Module, laser rangefinder TF-Luna Lidar Range Finder (operating range: 0.1 m…8 m, accuracy: 6%), Arducam Mini Module Camera Shield 5MP Plus OV5642 Camera Module.
(c) as the local computer, the Arduino Due AT91SAM3X8E ARM Cortex-M3 is used with 54 input/output ports. Moreover, the expansion board for sensors Arduino Sensor Shield V5 is used, which has I2C and UART interfaces, as well as digital and analog ports for sensors. Also, the module SIM7600E-H 4G HAT is used as a communication module with a data transfer rate of 150 Mbps.
In the considered hierarchical IoT-based control system, the peculiarities of the fuzzy automatic control implementation of the UAV’s flight process directly play the most important role in ensuring high-quality indicators and, as a result, efficient implementation of the meteorological measurements. Next, we will consider in detail the development of the functional structure and fuzzy controllers for the intelligent control system of the UAV for meteorological measurements.
3.3 Functional Structure and Fuzzy Controllers for the UAV’s Intelligent Control System
In this case, the designing of the functional structure and fuzzy controllers is carried out for the quadrotor unmanned aerial vehicle. Herewith, the intelligent control system based on fuzzy logic should have four channels for controlling spatial coordinates: (1) flight altitude and speed of altitude change during climb or descent; (2) longitudinal-horizontal coordinate ; (3) transverse-horizontal coordinate ; (4) yaw . In turn, the first channel includes two controlled variables simultaneously (z and ), since the climb speed (speed of altitude change) is an internal slave controlled variable of the altitude . Moreover, the first control channel is the main one in this system and the most important, since it allows the UAV to move to the desired altitude and at the required climb speed to carry out the main system’s task – performing meteorological measurements. The remaining three control channels are auxiliary and are used to stabilize the UAV at a given point in the horizontal plane so that it does not move away from the take-off location when climbing and further descending. In addition, in each of all four control channels considered, the actuators are four rotors of the quadcopter (UAV). Therefore, the presented system is a multi-connected automatic control system.
Thus, the developed functional structure of the four-channel multi-connected fuzzy automatic control system of the UAV for meteorological measurements is shown in Figure 4.
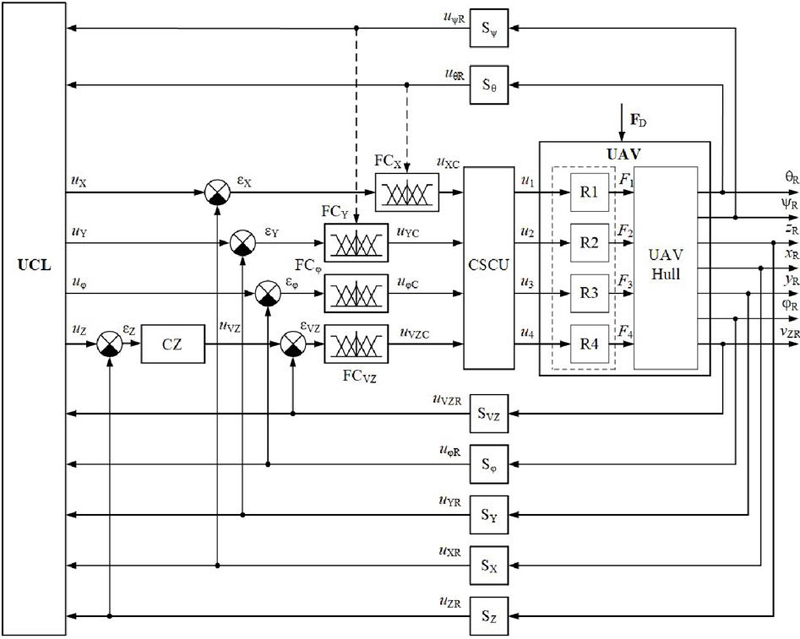
Figure 4 Functional structure of the four-channel multi-connected fuzzy automatic control system of the UAV for meteorological measurements.
The following designations are used in Figure 4: UCL is the upper control level; CZ is the flight altitude controller ( coordinate controller); FC, FC, and FC are the fuzzy controllers for coordinates , , and ; FC is the climb speed fuzzy controller ( coordinate controller); CSCU is the control signal converting unit; S, S, S, S, S, S, and S are the sensors of roll angle , pitch angle , climb speed , yaw angle , transverse-horizontal coordinate y, longitudinal-horizontal coordinate , and flight altitude ; R1, R2, R3, and R4 are the UAV’s rotor propulsors; , , , , , , and are the real values of the corresponding quantities that are measured by sensors; , , , and are the set values of the coordinates , and that come from the UCL; , , , , , , and are the output signals of the corresponding sensors S, S, S, S, S, S, and S; , , , , and are the output signals of the corresponding controllers CZ, FC, FC, FC, and FC; , , , and are the control signals that come from the CSCU to the corresponding UAV’s rotors; , , , and are the lifting force values of the corresponding UAV’s rotors; is the vector of disturbances that act on the UAV; , , , , and are the errors values of the corresponding control coordinates z, x, y, , and .
The UAV control system with the presented functional structure uses an altimeter, a three-axis accelerometer, a GPS module and a laser rangefinder to measure coordinates x, y, z, and . In turn, a three-axis gyroscope is used to measure angles , , and .
Since a quadrotor UAV is a multi-connected control plant, the CSCU is used to convert the output signals of the fuzzy controllers (, , , ) into direct control signals for each rotor (, , , ). In turn, the given converting unit implements the following expression
| (1) |
The climb speed fuzzy controller FC receives the error signal for control of the climb speed as an input, calculates its derivative and integral , and based on these three signals, using a certain fuzzy inference engine (FIE), calculates the corresponding control signal . As for the other three auxiliary fuzzy controllers (FC, FC, FC), it is sufficient to use only the control errors of the corresponding coordinates (, , ) and their derivatives (, , ) as input signals in their FIEs. In addition, to increase the control accuracy in the controllers FC and FC of the longitudinal-horizontal x and transverse-horizontal y coordinates, additional internal loops for slave control of the angles and can be used. To do this, it is necessary to use signals and from sensors S and S as additional feedback (are shown with dotted lines in Figure 4). Herewith, the resulting control signals and of the controllers FC and FC will be calculated based on expressions (2) and (3), respectively:
| (2) | ||
| (3) |
where is the output signal of the FIE of the x coordinate controller; is the output signal of the FIE of the y coordinate controller; , , , are the proportional coefficients of the corresponding internal control loops.
In this case, dependencies (2) and (3) represent proportional-differential (PD) control laws in the internal slave circuits of the roll and pitch control.
Finally, the flight altitude controller (z coordinate controller) CZ performs the functions of determining the required speed of climb or descent (corresponding to the signal ), depending on the set z (corresponding to the signal ) and actual flight altitude of the UAV. Thus, the current value is defined based on the error value using the pre-established by the operator dependencies (4).
In turn,
| (4) |
where is the fixed (set) speed of climb or descent, optimal for uniform measuring meteorological parameters; is the fixed (set) error value of the UAV altitude; and are the time constants corresponding to the smoothness of climb or descent during the final stage of the flight.
The fixed values of the parameters , , and are pre-set by the operator. In this way, controlling the speed setpoint based on the expression (4) allows UAV performing climbing and descending at a given constant speed in the main measurement stage as well as smooth approach to a fixed altitude value in the final stage of the climb and smooth landing in the final stage of the descent. Herewith, a smooth climb and descent at the final stages of the flight will be carried out according to the reference model of a first-order aperiodic dynamic process, which is described by Equation (5)
| (5) |
where .
Since the first control channel of the presented automatic control system (Figure 4) is the main one and the most important, therefore, next we will consider in detail the designing procedures of the climb speed fuzzy controller FC ( coordinate controller).
In this case, for all four fuzzy controllers, it is advisable to choose a Takagi-Sugeno FIE that allows synthesizing highly efficient and fairly easy-to-implement control devices [62].
For the climb speed controller, the input variables are the signals of the climb speed error , its derivative and integral . The signal is the output variable. In turn, the fuzzy inference engine of the Takagi-Sugeno type consists of the successive stages of fuzzification, aggregation, activation, and defuzzification [62]. The stages of fuzzification and aggregation are the same as for the FIE of Mamdani type [62]. At the stage of fuzzification, the instantaneous numerical values of the input variables are mapped to the corresponding fuzzy term sets with the calculation of the membership degree values. In this case, for the first variable , it is advisable to choose five linguistic terms (LT) with triangular-type membership functions: BN – big negative; SN – small negative; Z – zero; SP – small positive; BP – big positive. As for the second and third variables and , it is advisable to choose three triangular LTs for each: N – negative; Z – zero; P – positive. To ensure the versatility and the possibility of using this fuzzy controller in various UAV’s control systems, the input variables are given in relative units from their maximum values and, accordingly, have operating ranges from 1 to 1.
The appearance of the linguistic terms for the controller’s input variables with the initial parameters is shown in Figure 5.
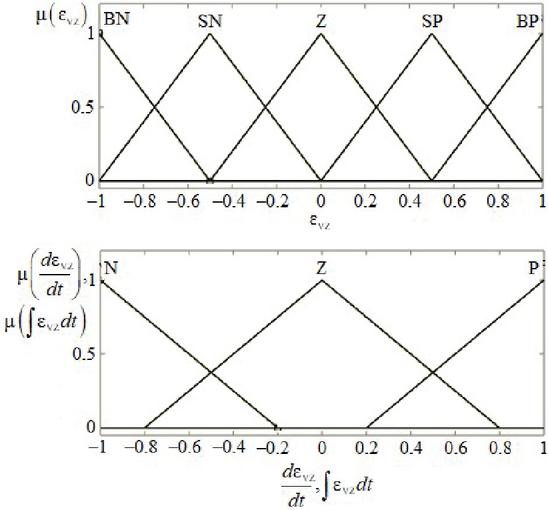
Figure 5 Linguistic terms with the set parameters for the controller’s input variables.
As can be seen in Figure 5, linguistic terms are evenly distributed across their operating ranges. Therefore, to fine-tune the fuzzy controller, the parameters of these terms must be determined using a further bio-inspired optimization procedure.
In turn, the cutoff levels for the antecedents of the rules are determined using the “min” operation at the aggregation stage. As the consequents of rules in the Takagi-Sugeno FIE, the membership functions of the impulse type are used, which are sums of weighted instantaneous values of all input variables [62]. In this case, the total number of the rule base (RB) rules of the controller s is determined by the number of all possible combinations of input signals LTs and is equal to 45 Each r-th rule of the given controller’s RB is represented by the expression (6)
| (6) |
where , , and are certain linguistic terms of the corresponding input variables; , , are the weight coefficients of the RB consequents; r is the rule number.
At the stage of activation for each of the RB rules, a clear value of the output variable is determined [42]. Thus, a point is assigned to each r-th rule, where is the cutoff level for this rule.
Therefore, the fragment of the formed rule base of the climb speed fuzzy controller should be presented in the form of Table 1.
Table 1 Fragment of the rule base of the climb speed fuzzy controller
| Linguistic Terms of Input Variable | Consequents Weights of Rules | |||||
| Rule Number | ||||||
| 1 | BN | N | N | |||
| 5 | BN | Z | Z | |||
| 11 | SN | N | Z | |||
| 18 | SN | P | P | |||
| 23 | Z | Z | Z | |||
| 27 | Z | P | P | |||
| 30 | SP | N | P | |||
| 36 | SP | P | P | |||
| 41 | BP | Z | Z | |||
| 45 | BP | P | P |
To find the optimal values of the weight coefficients , , and for each r-th rule it is also advisable to implement the bio-inspired optimization procedure.
The defuzzification stage of the Takagi-Sugeno FIE includes a transition for each linguistic variable from a discrete set of clear values to a single clear value according to the discrete method of the center of gravity [62]. In turn, this value is calculated based on the expression (7)
| (7) |
where s is the total number of RB rules.
The remaining three auxiliary fuzzy controllers (FC, FC, and FC) of the UAV’ control system are developed in the same way as the presented climb speed controller.
Before applying all the considered fuzzy controllers, it is advisable to use bio-inspired multi-agent optimization to find their optimal parameters [35].
To study the effectiveness of the proposed intelligent IoT-based control system, the next section presents the optimization and simulation procedures of the UAV’s flight processes.
4 Bio-inspired Multi-agent Optimization and Simulation of the UAV’s Intelligent Control System
In this section, to study the effectiveness of the developed intelligent control system, optimization procedures for the fuzzy climb speed controller, as well as simulation experiments of UAV’s flights in various modes are carried out. In turn, the optimization procedures for finding main controller’s parameters are conducted using the bio-inspired multi-agent method of fuzzy systems’ parametric optimization based on hybrid improved grey wolf algorithm that is designed in paper [35]. This approach enables the efficient optimization of diverse parameters within fuzzy control systems, leading to the identification of optimal solutions for the given problem. Notably, it exhibits a superior convergence rate when compared to techniques utilizing both basic and enhanced grey wolf algorithms. This method leverages group hunting strategies and dimension learning-based hunting, along with a local search tactic based on the extended Kalman filter algorithm [35]. As a result, it requires fewer computational resources and enhances the overall convergence rate towards optimal solutions, especially in the optimization of complex fuzzy systems.
The grey wolf optimization algorithm is a newly devised bioinspired multi-agent approach that emulates the collective behavior of wolves as they navigate through space during hunting [53]. In the GWO method, the models of wolves moving and interacting in a pack while in pursuit of prey are mirrored by the agents within a multi-agent system. These agents traverse a multidimensional search space, engaging in information exchange to ultimately locate the optimal solution for the given problem. Furthermore, a prominent characteristic of the GWO algorithm is its emulation of a rigid social hierarchy among the grey wolves within the pack [53]. This hierarchy consists of a specific number of wolves, each of which occupies one of the four hierarchical levels. The first three levels of the hierarchy are occupied by only one wolf each, while all the remaining wolves in the pack are situated at the fourth level. The leader of the pack, referred to as the alpha wolf, holds the highest position at the first level of the hierarchy. Beta and delta wolves, on the other hand, are respectively positioned at the second and third levels in the pack’s hierarchy. All other wolves in the flock, located at the lowest fourth level of the hierarchy, are designated as omega wolves [53]. During the optimization process, the basic GWO algorithm replicates the wolves’ collective hunting strategy, which relies on three primary behavioral mechanisms: encircling prey, hunting, and attacking [53].
The improved GWO technique introduces the dimension learning-based hunting (DLH) strategy alongside the group hunting approach of the basic GWO algorithm. This addition serves to augment population diversity and prevent premature convergence to suboptimal solutions [63]. The dimension learning-based hunting is an individualized hunting strategy conducted independently by each omega wolf in the pack, drawing from the experiences of its immediate neighbors as well as other randomly selected wolves of the omega type, rather than solely relying on the top three performers (alpha, beta, and delta). The DLH strategy operates through three core mechanisms: neighbors detection, learning, and updating [63].
To enhance the search process for the alpha, beta, and delta wolves, the hybrid improved grey wolf algorithm incorporates an additional local search strategy tailored for these top three performers in the pack [35]. This inclusion aims to augment the overall convergence rate towards optimal solutions. During each iteration of the algorithm, while the positions of all omega wolves are updated based on the group hunting and DLH strategies, the positions of the alpha, beta, and delta wolves undergo refinement using the extended Kalman filter algorithm [35]. This involves conducting a parallel local search from the positions of the three most proficient agents to pinpoint the local minima within their respective areas. In subsequent iterations, if any omega wolf advances to become a new beta or delta, it will then undertake a parallel local search from its updated position. Consequently, the former beta or delta wolf reverts to its original status as a regular omega wolf and engages in the search process utilizing the group hunting and DLH strategies like the other omegas. In the event that a new alpha wolf emerges within the pack, a leadership transition occurs. Following this mechanism, the wolf with the most favorable position within the flock assumes the role of the new alpha, while the previous alpha departs from the flock and proceeds to conduct a separate local search, no longer engaging with the pack. In this manner, the hybridization of the improved method with the local search technique is implemented to achieve more effective optimization. The main stages (initialization and search procedures) of this bio-inspired multi-agent method are presented in detail in [35].
In this work, when optimizing a fuzzy climb speed controller, the vector of optimized parameters X consisted of 135 weighting coefficients of the RB rule consequents (in 45 rules), 33 parameters (vertices) of triangular linguistic terms (for all 11 LTs shown in Figure 5), as well as 3 normalizing coefficients used to preliminary converting the absolute values of the controller input variables (, , ) into relative units (from 1 to 1). Thus, the total number of optimized parameters was 171.
The optimization of the given parameters were carried out on the basis of the mathematical model of the quadrotor UAV [64]. This model consists of a system of equations (4)
where m is the UAV mass; , , , , , and are the corresponding values of disturbing effects of wind; is the gravity force; , , and are the UAV’s moments of inertia about the longitudinal, transverse and vertical axes; l is the distance from the rotor to the center of mass; is the yaw moment coefficient; , , , , , , , , , , , and are the UAV’s model coefficients.
Since the time constants of the model of the UAV drives are significantly less than the time constants of the model of the UAV itself, then the dynamics of the rotor drives can be neglected. Also, as an assumption, we accept a directly proportional relationship between the rotors’ control signals , , , and the corresponding lifting force values , , , .
In turn, 30 agents in the population were used at the implementation of the hybrid bio-inspired method based on algorithms of the improved grey wolf optimization and extended Kalman filter. As for the objective function J for the UAV’s climb speed control the generalized integral quadratic deviation between the output of the reference model and the real UAV climb speed was selected:
| (9) |
where is the total transient time of the fuzzy control system; , are the objective function’s weighting coefficients; is the deviation of from the , . The reference model, in this case, is presented by the Equation (10)
| (10) |
where is the reference model’s time constant; is the set value of the UAV climb speed.
The maximum number of iterations was chosen as the criterion for the completion of the optimization. The parametric optimization of the vector X for the climb speed fuzzy controller was carried out 5 times with the subsequent selection of the best results. When calculating the values of the objective function, at each iteration, the simulation of the UAV control system’s transients was carried out in different operating modes (take-off, climbing and descending at a given speed, smooth approach to a fixed altitude value, and smooth landing) to effectively optimize all parameters of the fuzzy controller. The simulation experiments were conducted at the following UAV’s main parameters: UAV’s total mass with measuring equipment was 2.3 kg, distance from the rotor to center of mass was 0.209 m, total maximum lift force of 4 rotors was 40 N.
The Figure 6 shows the changing curve of the objective function J for the best case implementing the bio-inspired multi-agent method (based on the hybridization of algorithms of the improved grey wolf optimization and extended Kalman filter) during the parametric optimization process of the climb speed fuzzy controller.
As can be seen from Figure 6, the smallest value of the objective function was reached at the 47th iteration () in the best optimization case. In turn, this value of the objective function corresponds to the following found controller’s parameters. The normalizing coefficients optimal values are: ; ; . The appearance of the linguistic terms with the optimized parameters is presented in Figure 7.
The fragment of the rule base of the climb speed fuzzy controller with the optimal values of the weight coefficients is presented in Table 2.
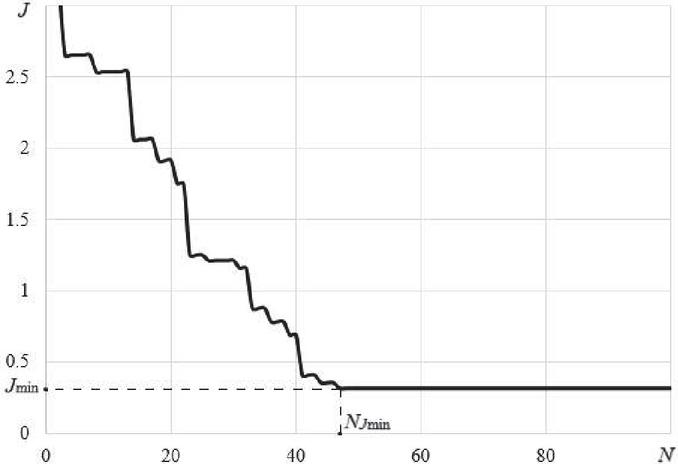
Figure 6 Convergence curve for the best case during the parametric optimization process of the climb speed fuzzy controller.
To study the effectiveness of the designed fuzzy controller it was compared with the optimally tuned conventional PID controller of the UAV climb speed. In turn, the PID controller coefficients values are: ; ; . Moreover, the simulation experiments were conducted for the following initial parameters: the set value of the climb speed at the mode of a uniform climb m/s; the fixed error value of the UAV altitude when approaching the set altitude value m; the fixed error value of the UAV altitude when landing m; the time constants of the flight altitude controller that correspond to the smoothness of climb and landing during the final stage of the flight s, s.
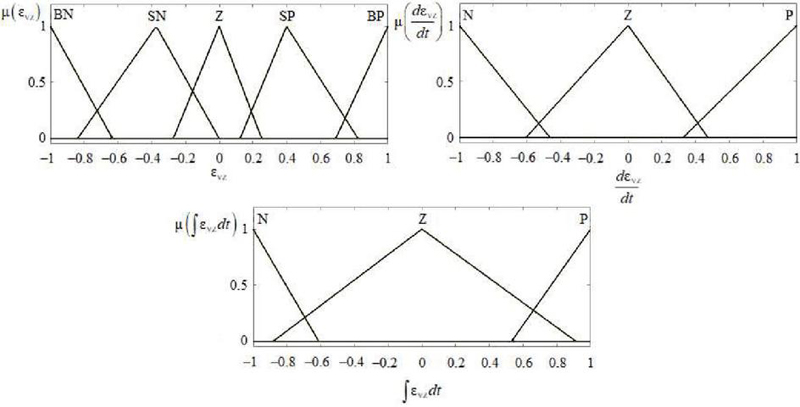
Figure 7 Linguistic terms with the optimized parameters for the controller’s input variables.
Therefore, Figure 8 shows transients graphs of the UAV’s climb speed automatic control during takeoff and further uniform climb.
Table 2 Fragment of the fuzzy controller’s RB with the optimal weight coefficients
| Linguistic Terms of Input Variable | Consequents Weights of Rules | |||||
| Rule Number | ||||||
| 1 | BN | N | N | 9.118 | 0.321 | 3.189 |
| 5 | BN | Z | Z | 8.76 | 0.318 | 3.065 |
| 11 | SN | N | Z | 8.146 | 0.206 | 3.201 |
| 18 | SN | P | P | 6.312 | 0.166 | 3.467 |
| 23 | Z | Z | Z | 5.131 | 0.112 | 3.578 |
| 27 | Z | P | P | 6.227 | 0.189 | 3.545 |
| 30 | SP | N | P | 7.244 | 0.174 | 3.168 |
| 36 | SP | P | P | 9.176 | 0.249 | 3.092 |
| 41 | BP | Z | Z | 9.853 | 0.297 | 2.943 |
| 45 | BP | P | P | 10.257 | 0.334 | 2.528 |
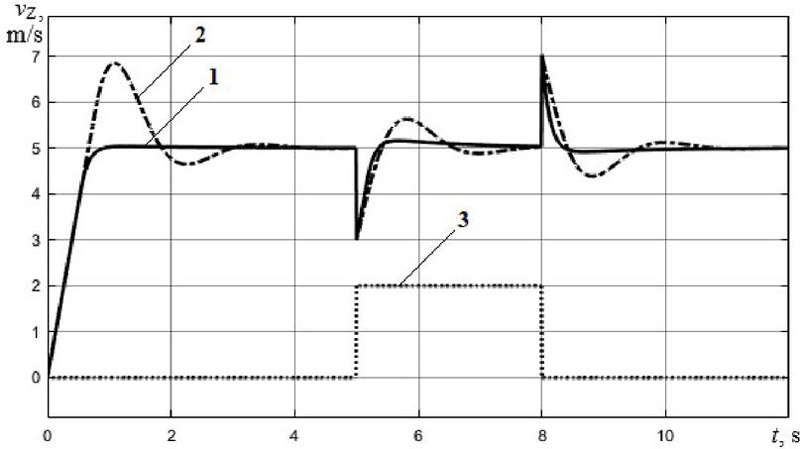
Figure 8 Transients graphs during the UAV’s takeoff and uniform climb: 1 – designed fuzzy controller; 2 – conventional PID controller; 3 – disturbances in climb speed.
In this case (Figure 8), a step control signal of 5 m/s of a set climb speed at the initial time was supplied to the system input. Then, at a time moment 5 s, the system was affected by a stepwise disturbance in speed with an amplitude of 40% from the set speed value (2 m) and a duration of 3 seconds.
Moreover, Figures 9 and 10 show transients graphs of controlling the speed of climb and descent during a smooth approach to a given altitude value and during a smooth landing, respectively.
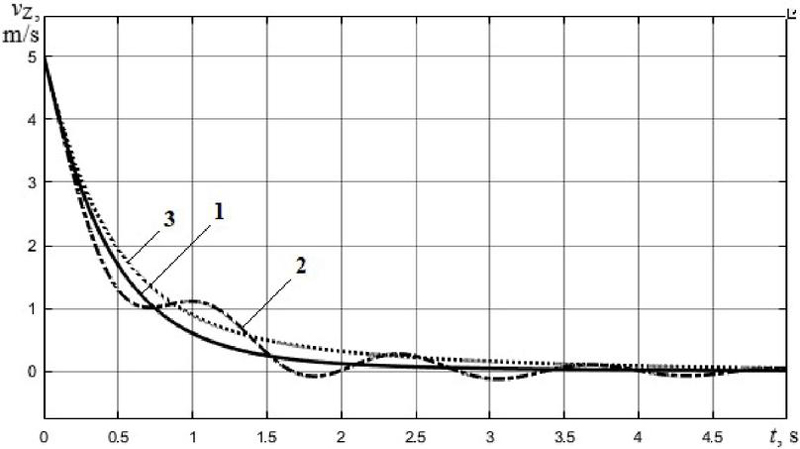
Figure 9 Transients graphs during the UAV’s smooth approach to a given altitude value: 1 – designed fuzzy controller; 2 – conventional PID controller; 3 – desired speed value.
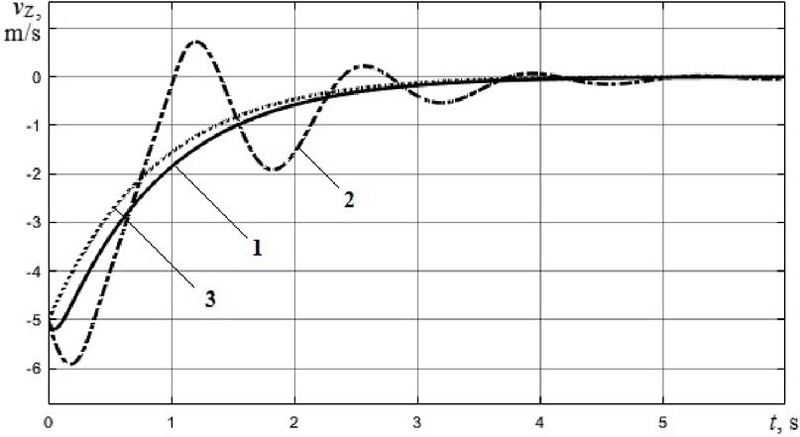
Figure 10 Transients graphs during the UAV’s smooth landing: 1 – designed fuzzy controller; 2 – conventional PID controller; 3 – desired speed value.
As can be seen from Figures 9 and 10, the developed intelligent system allows smoothly reducing the speed of altitude change to 0 m/s during a smooth approach to a given altitude value and during a smooth landing.
Based on the presented graphs of transients (Figure 8), a comparative analysis of the main quality indicators of automatic climb speed control processes was carried out, the results of which are shown in Table 3.
Table 3 Comparative analysis of the quality indicators for automatic control processes of climb speed during the UAV’s takeoff and further uniform climb
| Quality Indicators Values | ||
| Main Quality Indicators | Optimized Fuzzy Controller | Conventional PID Controller |
| System’s responding to a step control signal | ||
| Transient time, s | 0.74 | 2.67 |
| Overshoot, % | 0 | 37,9 |
| Oscillatoryness | 0 | 2 |
| System’s responding to a step disturbance | ||
| Transient time, s | 1.76 | 2.13 |
| Overshoot, % | 2.43 | 12.28 |
| Oscillatoryness | 1 | 2 |
As can be seen from Figures 8–10, and Table 3, the proposed UAV’s intelligent control system based on the developed and optimized fuzzy controller has significantly higher quality indicators of control than similar system with the conventional PID controller. So, when responding to a step control signal and disturbance this system has much shorter transient time (higher performance) and less values of overshoot and oscillatoryness. In particular, when responding to a step control signal, its transient time is 3.6 times less than that of a system based on PID controller. Also, when exposed to a stepwise disturbance, the proposed system has an overshoot value 5 times less with simultaneously lower values of control time and oscillation.
Moreover, with a smooth decrease in speed in the final stages of the flight, the control system with an optimized fuzzy controller practically repeats the trajectory of a given speed change. While the system with the conventional PID controller has significant oscillations, which in a certain way deteriorates quality indicators. This is confirmed in both experiments during a smooth approach to a given altitude value (Figure 9) and during a smooth landing (Figure 10).
As for the remaining three auxiliary fuzzy controllers (FC, FC, and FC) of the UAV’ control system, they can be optimized in the same way as the presented climb speed controller.
In general, the conducted simulation experiments showed that the proposed intelligent system based on integration of IoT, fuzzy logic and bio-inspired multi-agent computing has sufficiently high control quality indicators, which will significantly improve the efficiency of the UAV’s flight and meteorological measurements processes as well as the overall productivity of meteorological stations. Also, the proposed approach for the system’s designing is universal and can be quite easily used for different types of UAVs flying in various modes when carrying out different types of measurements.
5 Conclusions
The development and effectiveness study of the intelligent automatic control system of the UAV for meteorological measurements based on IoT and mobile technologies is presented in this paper. The proposed by the authors control system makes it possible to attain sufficiently high quality indicators of the UAV’s flight control during the meteorological measurements processes, which significantly improve the overall efficiency of the meteorological stations. In turn, the presented intelligent control system is created based on the integration of the following principles: (a) hierarchical two-level control and data acquisition based on IoT and mobile technologies, (b) simple and reliable fuzzy logic control with high performance, as well as (c) efficient optimization of fuzzy control devices based on bio-inspired multi-agent computing.
To evaluate the effectiveness of the proposed intelligent system, the development and bioinspired optimization of the climb speed fuzzy controller are conducted, as well as further simulation experiments for automatic control of the UAV flight processes in various modes are carried out in this study. The analysis of the obtained results of computer simulation shows that the designed system due to the use of fuzzy control has a higher efficiency and quality indicators (transient time, overshoot and oscillatoryness) compared to existing analogue at implementing in various flight modes (uniform climb, smooth approach to a given altitude value and smooth landing) when taking meteorological measurements. Moreover, the high accuracy of fuzzy control is achieved through the use of the advanced bio-inspired multi-agent method of parametric optimization based on hybrid improved grey wolf algorithm. In particular, during the UAV’s takeoff and uniform climb, at the responding to a step control signal the transient time and overshoot values were reduced by 3.6 times and 37,9%, respectively, compared to the similar system with conventional PID controller. As for responding to a step disturbance, the system’s transient time and overshoot values were reduced by 17.4% and 9,85%, respectively. In addition, for the flight modes of a smooth decrease in speed in the final stages of flight (completion of climb and landing), the control system with an optimized fuzzy controller repeated the trajectory of a desired speed change with high accuracy and without any oscillations. Finally, the developed fuzzy controller has only 45 rules, which gives the opportunity to provide enough simple software and hardware implementation as well as easy customization and adaptability.
Thus, all the research results presented in this paper fully confirm the high efficiency of the proposed intelligent control system based on IoT and mobile technologies, as well as the expediency of its application in various integrated meteorological stations using UAVs. In further research, is planned to test the proposed intelligent system in real UAV-based meteorological stations and compare the obtained results with the results of simulation experiments.
References
[1] X. Yang, et al., ‘High Accuracy Active Stand-off Target Geolocation Using UAV Platform,’ in 2019 IEEE International Conference on Signal, Information and Data Processing (ICSIDP), Chongqing, China, 2019, pp. 1–4, doi: 10.1109/ICSIDP47821.2019.9172919.
[2] L. Ruan et al., ‘Energy-efficient multi-UAV coverage deployment in UAV networks: A game-theoretic framework,’ in China Communications, vol. 15, no. 10, pp. 194–209, 2018, doi: 10.1109/CC.2018.8485481.
[3] H. Pi, et al., ‘Application of Multi-Rotor UAV Patrol System in Safety and Quality Management of Power Grid Construction Projects,’ in 2020 International Conference on Artificial Intelligence and Electromechanical Automation (AIEA), Tianjin, China, 2020, pp. 416–419, doi: 10.1109/AIEA51086.2020.00093.
[4] J. Yim, et al., ‘Low-power image stitching management for reducing power consumption of UAVs for disaster management system,’ in 2018 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 2018, pp. 1–3, doi: 10.1109/ICCE.2018.8326248.
[5] J. Lorincz, A. Tahiroviæ, B. R. Stojkoska, ‘A Novel Real-Time Unmanned Aerial Vehicles-based Disaster Management Framework,’ in 2021 29th Telecommunications Forum (TELFOR), Belgrade, Serbia, 2021, pp. 1–4, doi: 10.1109/TELFOR52709.2021.9653238.
[6] A. Smaoui, et al., ‘Automated Scanning of Concrete Structures for Crack Detection and Assessment Using a Drone,’ in 2022 IEEE 21st international Ccnference on Sciences and Techniques of Automatic Control and Computer Engineering (STA), Sousse, Tunisia, 2022, pp. 56–61, doi: 10.1109/STA56120.2022.10019224.
[7] F.H. Panahi, F.H. Panahi, ‘Cooperative Unmanned Aerial Vehicles for Monitoring and Maintenance of Heat and Electricity Incorporated Networks,’ in Coordinated Operation and Planning of Modern Heat and Electricity Incorporated Networks, IEEE, 2023, pp. 157–176, doi: 10.1002/9781119862161.ch7.
[8] A. D. Boursianis, et al., ‘Internet of Things (IoT) and Agricultural Unmanned Aerial Vehicles (UAVs) in smart farming: A comprehensive review,’ Internet of Things, Volume 18, 2022, 100187. https://doi.org/10.1016/j.iot.2020.100187.
[9] El M. Raouhi, et al, ‘Unmanned Aerial Vehicle-based Applications in Smart Farming: A Systematic Review,’ International Journal of Advanced Computer Science and Applications(IJACSA), 14(6), 2023, pp. 1150–1165. http://dx.doi.org/10.14569/IJACSA.2023.01406123.
[10] X. Li, et al., ‘A Novel UAV-Enabled Data Collection Scheme for Intelligent Transportation System Through UAV Speed Control,’ in IEEE Transactions on Intelligent Transportation Systems, vol. 22, no. 4, 2021, pp. 2100–2110. doi: 10.1109/TITS.2020.3040557.
[11] F. Liang, et al., ‘Towards Trajectory Prediction-Based UAV Deployment in Smart Transportation Systems,’ in 2023 32nd International Conference on Computer Communications and Networks (ICCCN), Honolulu, HI, USA, 2023, pp. 1–9, doi: 10.1109/ICCCN58024.2023.10230178.
[12] C. Mourgelas, et al., ‘Classification of Unmanned Aerial Vehicles in Meteorology: A Survey,’ Environ. Sci. Proc. 2023, 26, 135. https://doi.org/10.3390/environsciproc2023026135.
[13] P.J. Nolan, et al., ‘Coordinated Unmanned Aircraft System (UAS) and Ground-Based Weather Measurements to Predict Lagrangian Coherent Structures (LCSs),’ Sensors 2018, 18(12), 4448. https://doi.org/10.3390/s18124448.
[14] T. Shimura, et al., ‘Estimation of Wind Vector Profile Using a Hexarotor Unmanned Aerial Vehicle and Its Application to Meteorological Observation up to 1000 m above Surface,’ J. Atmos. Ocean. Technol, 2018, 35, 1621–1631. https://doi.org/10.1175/JTECH-D-17--0186.1.
[15] N. Shen, et al., ‘UAV Flight Control Algorithm based on Detection and Pose Estimation of the Mounting Position for Weather Station on Transmission Tower using Depth Camera,’ in 2022 IEEE 17th International Conference on Control & Automation (ICCA), Naples, Italy, 2022, pp. 522–528, doi: 10.1109/ICCA54724.2022.9831946.
[16] S. Verma, A. Adhya, ‘DAAPEO: Detect and Avoid Path Planning for UAV-Assisted 5G Enabled Energy-Optimized IoT,’ in IEEE INFOCOM 2023 – IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Hoboken, NJ, USA, 2023, pp. 1–6, doi: 10.1109/INFOCOMWKSHPS57453.2023.10225891.
[17] J.-H. Park, et al., ‘Multiple UAVs-based Surveillance and Reconnaissance System Utilizing IoT Platform,’ in 2019 International Conference on Electronics, Information, and Communication (ICEIC), Auckland, New Zealand, 2019, pp. 1–3, doi: 10.23919/ELINFOCOM.2019.87 06406.
[18] Y. Xian, et al., ‘An Intelligent Attitude Control Method for UAV Based on DDPG Algorithm,’ 2023 8th International Conference on Automation, Control and Robotics Engineering (CACRE), Hong Kong, China, 2023, pp. 190–196, doi: 10.1109/CACRE58689.2023.10208439.
[19] Q. Sun, H. Xu, ‘Adaptive Control Method of UAV Intelligent Rudder Based on Hybrid Genetic Algorithm,’ in 2021 33rd Chinese Control and Decision Conference (CCDC), Kunming, China, 2021, pp. 4753–4757, doi: 10.1109/CCDC52312.2021.9601687.
[20] O. Skakodub, O. Kozlov, Y. Kondratenko, ‘Optimization of Linguistic Terms’ Shapes and Parameters: Fuzzy Control System of a Quadrotor Drone,’ in 2021 11th IEEE International Conference on Intelligent Data Acquisition and Advanced Computing Systems: Technology and Applications (IDAACS), 2021, pp. 566–571, doi: 10.1109/IDAACS53288. 2021.9660926.
[21] M. Jiang, ‘Binocular Stereo Vision Intelligent Control Framework for the Landing Position of Quadrotor UAV Based on Fuzzy Control,’ in 2021 6th International Conference on Communication and Electronics Systems (ICCES), Coimbatre, India, 2021, pp. 1348–1352, doi: 10.1109/ICCES51350.2021.9489043.
[22] S. Prudden, et al., ‘Measuring wind with Small Unmanned Aircraft Systems,’ Journal of Wind Engineering and Industrial Aerodynamics, Volume 176, 2018, pp. 197–210. https://doi.org/10.1016/j.jweia.2018.03.029.
[23] K. Meier, et al., ‘Wind Estimation with Multirotor UAVs,’ Atmosphere, 13, 2022, 551. https://doi.org/10.3390/atmos13040551.
[24] T.F. Villa, et al., ‘An Overview of Small Unmanned Aerial Vehicles for Air Quality Measurements: Present Applications and Future Prospectives,’ Sensors, 16, 2016, 1072. https://doi.org/10.3390/s16071072.
[25] A. Wenz, T.A. Johansen, ‘Estimation of Wind Velocities and Aerodynamic Coefficients for UAVs using Standard Autopilot Sensors and a Moving Horizon Estimator,’ In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 2017, pp. 1267–1276. doi: 10.1109/ICUAS.2017.7991443
[26] P. Bruschi, et al., ‘Wind Speed and Direction Detection by Means of Solid-state Anemometers Embedded on Small Quadcopters,’ Procedia Eng. 2016, 168, pp. 802–805. https://doi.org/10.1016/j.proeng.2016.11.274.
[27] A. Rautenberg, et al., ‘The Multi-Purpose Airborne Sensor Carrier MASC-3 for Wind and Turbulence Measurements in the Atmospheric Boundary Layer,’ Sensors, 19, 2019, 2292. https://doi.org/10.3390/s19102292.
[28] A. Finn, et al., ‘Preliminary Evaluation of Atmospheric Temperature and Wind Profiles Obtained Using Unmanned Aerial Vehicle Based Acoustic Tomography,’ in Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences-ISPRS Archives, Enschede, The Netherlands, 2019; Volume 42, pp. 283–287. doi: 10.5194/isprs-archives-XLII-2-W13-283-2019
[29] W.C. Skamarock, J.B. Klemp, ‘A time-split nonhydrostatic atmospheric model for weather research and forecasting applications,’ Journal of Computational Physics, Volume 227, Issue 7, 2008, pp. 3465–3485. https://doi.org/10.1016/j.jcp.2007.01.037.
[30] A. Chodorek, R.R. Chodorek, A. Yastrebov, ‘Weather Sensing in an Urban Environment with the Use of a Uav and Webrtc-Based Platform: A Pilot Study,’ Sensors, 21, 2021, 7113. https://doi.org/10.3390/s21217113.
[31] V.N. Dobrokhodov, et al., ‘Energy-Optimal Guidance of Hybrid Ultra-Long Endurance UAV,’ IFAC-PapersOnLine,’ Volume 53, Issue 2, 2020, pp. 15639–15646. https://doi.org/10.1016/j.ifacol.2020.12.2500.
[32] C. Ma, Z. Jiao, J. Zuo, ‘Optimization of UAV Endurance Based on Materials,’ in 2022 2nd International Conference on Algorithms, High Performance Computing and Artificial Intelligence (AHPCAI), Guangzhou, China, 2022, pp. 747–751, doi: 10.1109/AHPCAI57455. 2022.10087397.
[33] X. Zhan, ‘Flight Endurance Extension of Medium Altitude Long Endurance UAV Based on Solar Energy System,’ in 2022 China Automation Congress (CAC), Xiamen, China, 2022, pp. 6847–6852, doi: 10.1109/CAC57257.2022.10055997.
[34] B. M. Keneni et al., ‘Evolving Rule-Based Explainable Artificial Intelligence for Unmanned Aerial Vehicles,’ in IEEE Access, vol. 7, pp. 17001–17016, 2019, doi: 10.1109/ACCESS.2019.2893141.
[35] O.V. Kozlov, Y.P. Kondratenko, O.S. Skakodub, ‘Information Technology for Parametric Optimization of Fuzzy Systems Based on Hybrid Grey Wolf Algorithms,’ SN Computer Science, Volume 3, issue 6, 2022. 463. https://doi.org/10.1007/s42979-022-01333-4.
[36] A. I. Shevchenko, ‘Natural Human Intelligence – The Object of Research for Artificial Intelligence Creation,’ International Scientific and Technical Conference on Computer Sciences and Information Technologies, CSIT 2019, Lviv, 2019, 1, pp. XXVI–XXIX, 8929799.
[37] Y. Kondratenko, A. Shevchenko, Y. Zhukov, G. Kondratenko, O. Striuk, ‘Tendencies and Challenges of Artificial Intelligence Development and Implementation,’ Proceedings of the 12th IEEE International Conference on Intelligent Data Acquisition and Advanced Computing Systems: Technology and Applications, IDAACS’2023, Vol. 1, 2023, Dortmund, Germany, pp. 221–226.
[38] I. Sidenko, et al., ‘Machine Learning for Unmanned Aerial Vehicle Routing on Rough Terrain,’ Lecture Notes on Data Engineering and Communications Technologies, 2023, 181, pp. 626–635. doi: 10.1007/978-3-031-36118-0_56.
[39] D. Zhang, Z. Chen, L. Xi, ‘Adaptive dual fuzzy PID control method for longitudinal attitude control of tail-sitter UAV,’ in 2016 22nd International Conference on Automation and Computing (ICAC), Colchester, UK, 2016, pp. 378–382, doi: 10.1109/IConAC.2016.7604949.
[40] E. r. Petritoli, F. Leccese, M. Cagnetti, ‘Takagi-Sugeno Discrete Fuzzy Modeling: an IoT Controlled ABS for UAV,’ in 2019 II Workshop on Metrology for Industry 4.0 and IoT (MetroInd4.0&IoT), Naples, Italy, 2019, pp. 191–195, doi: 10.1109/METROI4.2019.8792915.
[41] G. Sheng, G. Gao, ‘Research on the Attitude Control of Civil Quad-Rotor UAV Based on Fuzzy PID Control,’ in 2019 Chinese Control And Decision Conference (CCDC), Nanchang, China, 2019, pp. 4566–4569, doi: 10.1109/CCDC.2019.8832855.
[42] O. Kozlov, G. Kondratenko, Z. Gomolka, Y. Kondratenko, ‘Synthesis and Optimization of Green Fuzzy Controllers for the Reactors of the Specialized Pyrolysis Plants,’ Kharchenko V., Kondratenko Y., Kacprzyk J. (eds) Green IT Engineering: Social, Business and Industrial Applications, Studies in Systems, Decision and Control, Vol. 171, Springer, Cham, pp. 373–396, 2019. https://doi.org/10.1007/978-3-030-00253-4\_16.
[43] Y. P. Kondratenko, O. V. Kozlov, L. P. Klymenko, G. V. Kondratenko, ‘Synthesis and Research of Neuro-Fuzzy Model of Ecopyrogenesis Multi-circuit Circulatory System’ Advance Trends in Soft Computing, Studies in Fuzziness and Soft Computing, Berlin, Heidelberg: Springer-Verlag, 2014, Vol. 312, pp. 1–14. https://doi.org/10.1007/978-3-319-03674-8\_1.
[44] Y.P. Kondratenko, O.V. Kozlov, ‘Mathematical Model of Ecopyrogenesis Reactor with Fuzzy Parametrical Identification,’ Recent Developments and New Direction in Soft-Computing Foundations and Applications, Studies in Fuzziness and Soft Computing, Lotfi A. Zadeh et al. (Eds.), Berlin, Heidelberg: Springer-Verlag, 2016, Vol. 342, pp. 439–451. https://doi.org/10.1007/978-3-319-32229-2\_30.
[45] J. Lv et al., ‘Fuzzy SMC for UAV to Resist Strong Wind with Disturbance Approximation,’ in 2018 Ninth International Conference on Intelligent Control and Information Processing (ICICIP), Wanzhou, China, 2018, pp. 93–98, doi: 10.1109/ICICIP.2018.8606715.
[46] W. Yu, J. Li, K. Yang, ‘Research on Fuzzy Adaptive Stabilization PID Control System,’ 2018 IEEE 3rd Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 2018, pp. 2037–2043, doi: 10.1109/IAEAC.2018.8577621.
[47] N. Ben, S. Bouallègue, J. Haggège, ‘Fuzzy gains-scheduling of an integral sliding mode controller for a quadrotor unmanned aerial vehicle’, Int. J. Adv. Comput. Sci. Appl., Vol. 9, no. 3, 2018, pp. 132–141. doi: 10.14569/IJACSA.2018.090320
[48] Y.P. Kondratenko, O.V. Korobko, O.V. Kozlov, ‘Synthesis and Optimization of Fuzzy Controller for Thermoacoustic Plant,’ Lotfi A. Zadeh et al. (Eds.) Recent Developments and New Direction in Soft-Computing Foundations and Applications, Studies in Fuzziness and Soft Computing, Vol. 342, Berlin, Heidelberg: Springer-Verlag, pp. 453–467, 2016. https://doi.org/10.1007/978-3-319-32229-2\_31.
[49] A. Yildiz, M. Polat, M. T. Özdemir, ‘Design Optimization of Inverted Switched Reluctance Motor using Ant Colony Optimization Algorithm,’ in: 2018 International Conference on Artificial Intelligence and Data Processing (IDAP), Malatya, Turkey, pp. 1–6, 2018. doi: 10.1109/IDAP.2018.8620923.
[50] G. Yavuz, B. Durmuş, D. Aydın, ‘Artificial Bee Colony Algorithm with Distant Savants for constrained optimization,’ Applied Soft Computing., Vol. 116, 108343, 2022. https://doi.org/10.1016/j.asoc.2021.108343.
[51] Y.P. Kondratenko, A.V. Kozlov, ‘Parametric optimization of fuzzy control systems based on hybrid particle swarm algorithms with elite strategy,’ Journal of Automation and Information Sciences, Vol. 51, Issue 12, New York: Begel House Inc., pp. 25–45, 2019. doi: 10.1615/JAutomatInfScien.v51.i12.40.
[52] B. Yang, et al., ‘Discrete bacterial foraging optimization for community detection in networks,’ Future Generation Computer Systems, Vol. 128, pp. 192–204, 2022. https://doi.org/10.1016/j.future.2021.10.015.
[53] S. Mirjalili, S. M. Mirjalili, A. Lewis, ‘Grey wolf optimizer,’ Adv. Eng. Software, 69, pp. 46–61, 2014. https://doi.org/10.1016/j.advengsoft.2013.12.007.
[54] S., Muthukaruppan, M.J. Er, ‘A hybrid particle swarm optimization based fuzzy expert system for the diagnosis of coronary artery disease,’ Expert Systems with Applications, 39(14), 2012, pp. 11657–11665. https://doi.org/10.1016/j.eswa.2012.04.036.
[55] J. Radosavljević, ‘Optimal power flow using a hybrid optimization algorithm of particle swarm optimization and gravitational search algorithm’, Electric Power Components and Systems, 43(17), 2015, pp. 1958–1970. https://doi.org/10.1080/15325008.2015.1061620.
[56] T., Jayabarathi, ‘Economic dispatch using hybrid grey wolf optimizer,’ Energy, 111, 2016, pp. 630–641. https://doi.org/10.1016/j.energy.2016.05.105.
[57] O.V. Kozlov, ‘Optimal Selection of Membership Functions Types for Fuzzy Control and Decision Making Systems,’ in: Proceedings of the 2nd International Workshop on Intelligent Information Technologies & Systems of Information Security with CEUR-WS, Khmelnytskyi, Ukraine, IntelITSIS 2021, CEUR-WS, Vol-2853, 2021, pp. 238–247. https://ceur-ws.org/Vol-2853/paper22.pdf.
[58] Y.P. Kondratenko, et al., ‘Automation of Control Processes in Specialized Pyrolysis Complexes Based on Web SCADA Systems,’ in: Proceedings of the 9th IEEE International Conference on Intelligent Data Acquisition and Advanced Computing Systems: Technology and Applications (IDAACS), Vol. 1, Bucharest, Romania, 2017, pp. 107–112. doi: 10.1109/IDAACS.2017.8095059.
[59] E. Hernandez, O. Castillo, J. Soria, ‘Optimization of fuzzy controllers for autonomous mobile robots using the grey wolf optimizer,’ 2019 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE), New Orleans, LA, USA, pp. 1–6, 2019. doi: 10.1109/FUZZ-IEEE.2019.885 8861.
[60] Y.P. Kondratenko, O.V. Korobko, O.V. Kozlov, ‘Frequency Tuning Algorithm for Loudspeaker Driven Thermoacoustic Refrigerator Optimization,’ Lecture Notes in Business Information Processing: Modeling and Simulation in Engineering, Economics and Management. – K. J. Engemann, A. M. Gil-Lafuente, J. M. Merigo (Eds.), Vol. 115, Berlin, Heidelberg: Springer-Verlag, pp. 270–279, 2012. https://doi.org/10.1007/978-3-642-30433-0\_27.
[61] Y.P. Kondratenko, O.V. Kozlov, ‘Mathematic Modeling of Reactor’s Temperature Mode of Multiloop Pyrolysis Plant,’ Lecture Notes in Business Information Processing: Modeling and Simulation in Engineering, Economics and Management. – K. J. Engemann, A. M. Gil-Lafuente, J. M. Merigo (Eds.), Vol. 115, Berlin, Heidelberg: Springer-Verlag, pp. 178–187, 2012. https://doi.org/10.1007/978-3-642-30433-0\_18.
[62] T. Takagi, M. Sugeno, ‘Fuzzy identification of systems and its applications to modeling and control,’ IEEE Transactions on Systems, Man, and Cybernetics. 1985, SMC–15, N 1, pp. 116–132. doi: 10.1109/TSMC. 1985.6313399.
[63] M.H., Nadimi-Shahraki, S., Taghian, S. Mirjalili, ‘An improved grey wolf optimizer for solving engineering problems,’ J. Expert Systems with Applications, Vol. 166, 2021, 113917. https://doi.org/10.1016/j.eswa.2020.113917.
[64] V.L. Timchenko, D.O. Lebedev, ‘Optimization of Processes of Robust Control of Quadcopter for Monitoring of Sea Waters,’ Journal of Automation and Information Sciences, NY., Begell House, Vol. 51, Issue 2, 2019, pp. 1–10. doi: 10.1615/JAutomatInfScien.v51.i2.10.
Biographies

Oleksiy Kozlov is a Doctor of Science, Professor of the Department of Intelligent Information Systems at Petro Mohyla Black Sea National University (PMBSNU), Ukraine. He has received a master degree in electromechanics (2011) from Admiral Makarov National University of Shipbuilding, a Ph.D. degree (2014) and a Dr.Sc. degree (2022) in control processes automation from Odessa National Polytechnic University. In 2021 he became a laureate of the Award of the Parliament of Ukraine for Young Scientists. Since 2011 took part in the implementation of a number of international and state projects related to the automation of complex industrial plants, information technologies, intelligent control systems, robotics, and the Internet of things. His research interests include automation, intelligent information and control systems, fuzzy logic, bioinspired optimization techniques, and robotics.

Yuriy Kondratenko is a Doctor of Science, Professor, Honour Inventor of Ukraine (2008), Corr. Academician of Royal Academy of Doctors (Barcelona, Spain), Head of the Department of Intelligent Information Systems at Petro Mohyla Black Sea National University (PMBSNU), Ukraine, Leading Researcher of the Institute of Artificial Intelligence Problems of MES and NAS of Ukraine. He has received (a) a Ph.D. (1983) and Dr.Sc. (1994) in Elements and Devices of Computer and Control Systems from Odessa National Polytechnic University, (b) several international grants and scholarships for conducting research at Institute of Automation of Chongqing University, P.R. China (1988–1989), Ruhr-University Bochum, Germany (2000, 2010), Nazareth College and Cleveland State University, USA (2003), (c) Fulbright Scholarship for researching in USA (2015/2016) at the Dept. of Electrical Engineering and Computer Science in Cleveland State University. Research interests include robotics, automation, sensors and control systems, intelligent decision support systems, and fuzzy logic.

Oleksandr Skakodub is a lecturer in the Department of Intelligent Information Systems at Petro Mohyla Black Sea National University (PMBSNU), Ukraine. He has received a master degree in Computerized control systems from the Admiral Makarov National University of Shipbuilding in 2019. Since 2019 took part in the implementation of the state project related to the mobile robot’s remote control system development. His main research interests include computer control systems, sensor systems, fuzzy logic, intelligent robotic devices, and measurement systems.
Journal of Mobile Multimedia, Vol. 20_3, 555–596.
doi: 10.13052/jmm1550-4646.2032
© 2024 River Publishers