A Mobile Application of a Decision Support System for Ballasting a Floating Dock
Andriy Topalov1,*, Yuriy Kondratenko2, 3, Anatolii Shevchenko3, Valeriy Zaytsev4, Oleksiy Kozlov2, Dmytro Zaytsev4 and Volodymyr Golikov5
1Computerized Control Systems Department, Admiral Makarov National University of Shipbuilding, Mykolaiv, Ukraine
2Intelligent Information Systems Department, Petro Mohyla Black Sea National University, Mykolaiv, Ukraine
3Institute of Artificial Intelligence Problems of MES and NAS of Ukraine, Kyiv, Ukraine
4Design Bureau IMT LLC, Mykolaiv, Ukraine
5National University “Odesa Maritime Academy”, Odesa, Ukraine
E-mail: topalov_ua@ukr.net; y_kondrat2002@yahoo.com; a.i.shevchenko@ipai.net.ua; zvalv1974@gmail.com; kozlov_ov@ukr.net; zdmvl1982@gmail.com; volodymyr.golikov@gmail.com
*Corresponding Author
Received 31 October 2023; Accepted 18 February 2024
Abstract
This paper is devoted to increasing the automation level of docking operations through the development of a mobile application for a decision support system capable of determining the optimal option for loading ballast into floating dock compartments when setting up and launching ships. The proposed decision support system and the mobile application allow implementing effective ballasting of the floating dock before docking the ship based on mathematical calculations of the impact of the ship on the floating dock and the ballasting rules. To test the developed system, the paper presents the functioning of the mobile application for a case of calculation of the docking up process of a 4,100-ton ship. In particular, the load forces of this ship are calculated with a graphical display of the distribution of the influence of 20 sections of the ship on 6 pontoons of the floating dock. As a result, this decision support system with the implemented mobile application has the characteristics of a convenient interface and is easy to operate. It can provide the dockmaster data and suggestions for decision-making, and during its operation, it is actively replenished with a database of the docked up ships.
Keywords: Floating dock, ballasting system, automation of docking operations, decision support system, mobile application, interface, database.
1 Introduction
The number of ships in the world’s merchant fleet is steadily growing [1]. At the end of 2012, there were more than 48,000 ships with a deadweight of 1.5 billion tons. Maritime transport serves about 80% of the volume of international trade. With the increase in the number of ships, their sizes, and speeds, the world community is paying more and more attention to the effective repair of these vehicles using dry and floating docks [2, 3]. First of all, this is an increase in the reliability of shipping, and a reduction in the probability of accidents through the application of a system of international and national measures of a technical, technological, organizational, and legal nature [4–6].
The concept of modern ship repair covers a wide range of issues. The main focus is on the technical condition of the ship and the quality of drawing up the ballast plan of the floating dock. Additionally, attention is given to the preparation of the work crew to perform their duties, etc. [7–9]. However, certain safety issues of docking the ship require constant modernization of the floating dock’s ballasting information systems.
Effective ship repair requires ensuring the safe docking of the ship. This depends on the condition of the ship and the floating dock. The parameters of landing, stability, and overall longitudinal strength should be within the permissible limits determined by existing requirements. At the stage of placement of the ship in the floating dock, proper seaworthiness characteristics are ensured, including stability, unsinkability, and strength, which depend on the distribution of ballast cargo.
The condition of the floating dock largely depends on the quality of its ballasting [10–14]. The relevant ship documentation and the use of computing systems, including those based on mobile devices, allow the calculations necessary to obtain values of stability parameters and loads on the ship’s hull. Taking into account the importance of choosing the optimal option for ballasting a floating dock and determining the most accurate values of the specified parameters, there is a need for an alternative universal tool. This tool would be used for drawing up a preliminary ballast plan. The presence of a double control system will help improve the quality of the cargo plan and reduce the probability of error during the corresponding calculations.
In the transitional conditions of the reformation of innovative and information technologies of shipbuilding and ship repair, the use of a complex of available information technologies by manufacturers is especially relevant. One of the most promising today is the market of computer software and mobile applications as a whole, which is characterized by active development.
The use of software in the shipbuilding field and certain problematic aspects of their development were considered by scientists from around the world. The need to determine the seaworthy condition of a floating object arises during its operation, and modern methods using software are involved in solving this task, in addition to standard computational procedures. In the papers [15–20] general issues of ensuring the seaworthiness of the ship are outlined, which fully reflect the regulation of stability, landing, buoyancy, and strength of ships. In the work [15], the account of the flexibility of the hull in the calculation of landing and bending elements of the ship was considered. An approximate estimate of the effect of flexibility on the bending elements of the ship hull was obtained for the calculation of the loading of the ship on the ship’s computers. In [16] by MAST Systems Ltd. the MastSystem4 program package designed for stability calculations of undamaged and distressed ships was developed. Taking into account the need for periodic control of parameters of stability and simplicity of performed operations. The paper examines the physical models used for calculating the overall stress state of the hulls of single- and multi-hull ships under the action of integral parameters of external loads [17]. In the paper [18], the Polish Maritime Register developed a software package that increases the efficiency of accurate calculations of the strength of ship hulls. The developed programs use the finite element method and provide fast and efficient modeling of the overall structure of the hull or its parts, solving the equilibrium equation and analyzing the calculation results. The method of developing a software product, which allows for generating a ship’s cargo program with an assessment of its seaworthiness criteria based on rear loading, is proposed in [19]. The work [20] described the software module that implements the formation of the ship’s cargo program using the existing database.
Among the sources of literature where software is used for floating docks [21–23], the following studies should be highlighted. The papers [24–30] present different systems for collecting and processing measurement data for remotely conducting docking operations, regarding the raising or lowering of a ship. These systems include specialized hardware and software designed for automated measurement of the level of ballast in the compartments and control of the landing of the floating dock. Moreover, in the studies [31, 32], special attention is paid to measuring the deflections and inclination of the pontoon deck of the floating dock under the influence of the docked vessel. The developed system uses a specialized wireless sensor network and transmits all information to a remote server.
In [33], a variant of floating dock arithmetic was studied. Accordingly, a real-time control and simulation system was developed based on the LabVIEW platform. Matlab was invoked during the calculation process to draw up the ballast water regulation schedule. Computations for real-time simulation were achieved through the collaboration of LabVIEW and Matlab. The working process of the system was represented by expressing the procedure of landing the hull section on the floating dock.
In the research [34], the authors developed a program and instructions for preparing raw data for calculating dock ballasting on a computer. The program allows calculating the dock- ship system for the docking operation, taking into account the variability of the moments of inertia of the hulls of the dock, gaps in the keel track, construction deflection, the presence or absence of a variable gasket, etc.
Despite the presence of a significant number of publications with the existing use of the software, further research into the prospects of their effective use and adaptation in the control of docking operations of sinking and surfacing is also necessary. On the other hand, the number of publications on software and the use of mobile applications for floating dock maintenance is limited. The growing popularity of smartphones is due to the presence of a large number of advantages over stationary personal computers. They allow performing a significant part of the operator’s tasks while remaining portable. According to Statista [35], 197 billion app downloads were recorded on all mobile platforms in 2017. For example, highly efficient mobile applications, as well as wireless data transmission technologies, are widely used to control various robotic systems and other complex technical plants [36–39]. The basic functionality of portable devices can be significantly expanded with the help of applications. They open new channels of communication and opportunities for the introduction of dock operations by the personnel of the floating dock. This potential offers wider access to information databases and basic services, improving the information flows of the ship repair enterprise.
The purpose of the work is to increase the level of automation of docking operations by developing a mobile application for the decision support system. This application will be capable of determining the optimal option for loading ballast in the floating dock compartments when setting up and launching ships.
The rest of the paper is structured as follows. Section 2 provides a brief overview of the mobile applications in the shipbuilding industry. Section 3 presents the mathematical rationale and functional structure of the mobile application for the decision support system of the floating dock ballasting. In turn, the implementation of the mobile application for the decision support system of the floating dock ballasting is presented in Section 4. Finally, Section 5 concludes the work and suggests potential avenues for future research.
2 Features of Mobile Applications in the Shipbuilding Industry
All-encompassing and mobile Internet, miniature smart devices, smart production machines with self-learning, cheapening, and, accordingly, availability of personal mobile gadgets – became the basis of another transformation of society and industry.
Shipbuilding production within the framework of modern industrialization involves flexibility, high efficiency, productivity, and most importantly, satisfaction of individual needs. Mandatory for all digital enterprise models is the presence of a digital counterpart in the virtual world for each physical component (asset). Communication of such components between themselves and the outside world takes place through various networks, which are combined into the so-called Internet of Things (IoT), and in industrial production – Industrial Internet of Things (IIoT). Taking into account the intellectualization and interaction of “everything”, the number of calculations and the amount of data increases significantly, which requires significant computing resources. Part of the data and complex calculations can be located remotely from the physical entity of the asset. This is possible due to the use of cloud technologies (Cloud), which make it possible to remove all complex calculations from end devices, store a large amount of data, and carry out their processing (BigData analytics).
The creation of shipbuilding and ship repair industries following modern requirements of the industry requires the restructuring of the enterprise’s infrastructure. Along with this, an important factor is the possibility of its smooth modernization without long production stops and significant capital investments. At many enterprises, in one form or another, there are automated systems for managing technological processes and productions, made, in particular, in the ideology of Industry 3.0. Integration of these systems in enterprises is at least possible as “atomic” components. This does not give the maximum flexibility of production, but it brings it closer to the required functionality and makes it possible to gradually replace its components. It should be noted that the existing control systems have access to a large amount of data, the potential of which is much greater than the used one. In addition, such systems are usually open for taking control actions, which makes it possible to implement coordination control.
Based on the modernization of the shipbuilding and ship repair industry, the mobile application acts as autonomous software designed to work on smartphones, tablets, and other mobile devices to optimize and solve technical tasks [40]. Moreover, in combination with wireless networks, mobile applications have a significant potential for expanding time, space, and production efficiency. At the same time, mobile technologies open up new communication channels and opportunities for introducing docking operations, potentially offering wider access to information and basic data.
Mobile devices are compact portable devices running the operating system (iOS, Android, Windows Phone) and supporting work in mobile networks and Wi-Fi technology [39]. Their distinctive features are small size, individuality, maximum ease of use, provision of communication and work on the Internet, compatibility with stationary computers and laptops, long battery life, quick startup, and shutdown. The main property of applications should be considered the degree of elaboration of the functionality, which ensures the uniqueness and attractiveness of the final mobile product. Among the most used mobile applications for the shipbuilding industry, the following types should be singled out [41]: (a) mobile applications for process automation, such as systems for automating the production, sale and storage of products, which reduce their cost compared to full-fledged workstations based on personal computers; (b) applications for increasing productivity, collaboration and joint work, including systems of shared access to files and joint work with them, messengers, message trackers, systems of electronic surveys, mobile versions of corporate social networks; (c) project and task management systems that require constant collection, clarification and synchronization of information.
Today, there are several approaches to the technical implementation of applications for mobile devices, namely: native, hybrid, and progressive web applications (PWA). Their main characteristics are presented in Table 1.
Table 1 Comparative characteristics of the main types of mobile applications
| Native | Hybrid | PWA | |
| Possibility of code reuse | The code is being developed separately for each platform | Possible code reuse | Possible code reuse |
| Access to device features | The most complete | Limited progress | Very low |
| Model dissemination | Download from the app store | Loading in shop taxes | Access by PCG |
| Be productive | High | Low | Low |
| Device support | High | High | Average |
| Popularity | High | Average | Average |
| Support external libraries | High | Average | High |
The main operating principles of applications developed using different approaches are shown in Figure 1.
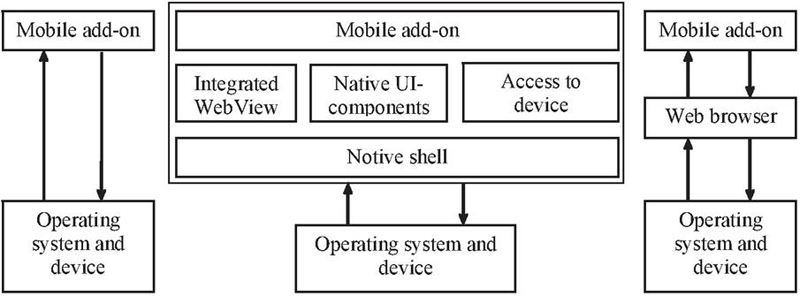
Figure 1 The main approaches to the implementation of mobile applications.
At the same time, mobile applications allow using any service much more conveniently than websites, because they work without access to the Internet and use the built-in APIs of the portable device. Also, their use enables the company to create a powerful brand and expand the sales market. The implementation of mobile loyalty programs has become a proven tool that allows companies to effectively interact with customers while studying the peculiarities of their behavior and incentives. The integration of applications with social networks ensures an increase in the number of buyers [42].
Therefore, the mobile application as one of the main information flows of the enterprise provides: quick access to data for users of any level; wireless two-way communication with technological equipment and information system; receiving relevant information in real time; quick decision-making. The specified functions are implemented based on minimalistic and functional user-friendly interfaces. The optimal design allows the operator to fully focus on the technological process and the performance of job duties.
3 Mathematical Rationale and Functional Structure of the Mobile Application for the Decision Support System of the Floating Dock Ballasting
Based on data about the ship and the layout of its location, verification calculations are carried out. For ships whose mass does not exceed 75% of the loading capacity of the dock, the dockmaster must calculate the ballasting for several positions of the dock when raising (lowering) the ship. Also, this calculation must be performed when icebreakers with a significant displacement and a relatively short length are placed in a floating dock. For ships whose mass exceeds 75% of the loading capacity of the dock, as well as for emergency ships, the overall strength of the system of the dock-ship is additionally checked. A mini-computer is installed on newly built docks of medium and large capacity to monitor on the display screen all the specified values of the state of the dock during sinking and surfacing. This includes settlement at several points of deflection, graphs of bending moments, and shearing forces, etc.
A typical scheme for ballasting a floating dock when docking ships establishes the method of selecting ballast in the dock pontoons and the form of calculations performed by the dockmaster. The purpose of the calculation is to obtain such distribution of ballast in which the dock trim is zero, and the moment that bends the ship’s dock system is less than allowed for this dock. It should be taken into account that with a large reserve of the loading capacity of the dock, bending moments acting on the dock–ship system can be completely eliminated by equalizing the load on each pontoon due to ballast.
When distributing ballast (especially in long multi-pontoon docks), one should strive to make the difference in loads and support forces within each pontoon as small as possible.
During operation, the following forces act on the dock: the weight of the dock itself, the weight of the docked ship, and support forces. To determine the weight of a dock (or ship), the mass is multiplied by the acceleration of free fall. The mass of the dock is given in its passport data, separated by pontoons. The mass of dock gantry cranes is taken into account in the places where the cranes are fixed when the dock is submerged. If there is no data on the distribution of the load on the pontoons, the weight of the dock is distributed on the pontoons in proportion to their volumes or evenly distributed along the length of the dock. This should be taken with sufficient accuracy to calculate the ballasting, considering the load from the gantry cranes on the regular pontoon.
As a rule, the weight of the ship is indicated on the dock plan. In the absence of these data, the mass of the ship can be determined as the volumetric tonnage of the ship, multiplied by the density of water, according to the formulas of the theory of the ship. This process involves taking measurements of the draft of the ship in the bow and stern beforehand. Before measuring the draft with the ship, all cargo to be removed during docking must be removed.
The diagram of the distribution of the weight of the ship can be accepted with sufficient accuracy for the calculation of ballasting in the form of stepped curves with different intensities of ordinates for ships with different coefficients of total completeness.
The load from the ship can be distributed in rectangles (Figure 2, a). The ordinate a is calculated for the general coefficients of completeness 0.5; 0.65; 0.8, according to the equation , where 1.4; 1.2; 1.1. Intermediate values are determined by the interpolation.
The ordinates and are found by calculating the conditions for obtaining the center of gravity of the ship along the length in a certain place, that is, by solving the system of moment levels and the weight of the ship. For the case of the distribution of the load from the ship by rectangles, we will get a system
| (1) |
where are the ordinates; is the length of the ship; is the abscissa of the center of gravity; is the dock weight of the ship. When distributing the load from the ship along a trapezoid with different intensities of the ordinate, which depends on the purpose of the ship (Figure 2, b) , (for stern); .
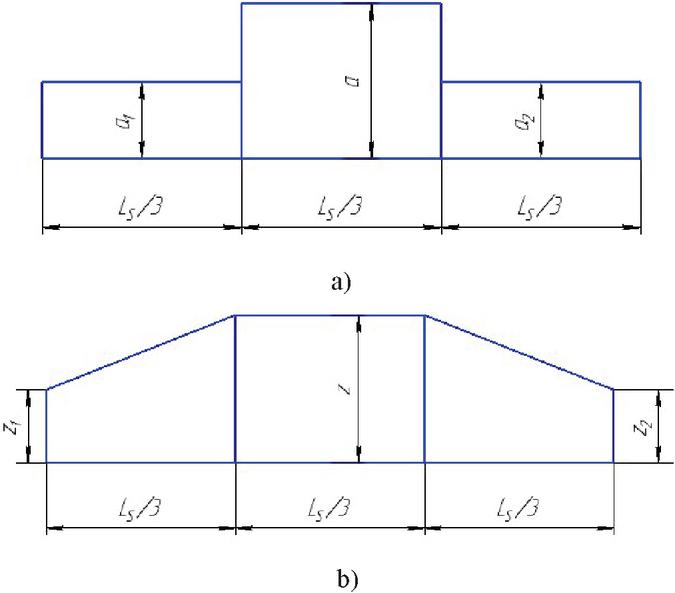
Figure 2 Diagrams of the distribution of the ship’s weight: (a) by rectangles; (b) along trapezoids.
Each of these schemes will provide sufficient calculation accuracy. The choice depends on the type of ship and the distribution of the load along the length of the dock.
The distribution of the load along the length of the dock and the determination of moments relative to the middle are recorded in tabular form. If there is a lack of compensating ballast to bring to zero the difference between the load and support forces within each pontoon, the distribution of ballast must be checked by calculating the total strength according to the typical scheme. In this case, when the compensating ballast is distributed in the end pontoons, the bending moment on the dock midden will be close to zero. However, in sections close to 1/4 of the length from the bow and stern, the moment values may exceed the allowable ones.
Further calculation is carried out in the following sequence. The weight of non-pumping ballast depends on the buoyancy of the dock and the level of the non-pumping water,
| (2) |
where is the water density; n is the number of pontoons; , are the length and width of the pontoon; is the height of undamped ballast; K is the keel of the bottom of the dock.
In tabular form, the load from the ship is distributed by pontoons, taking into account the length of the keel track. In the nose and stern, the load is distributed on the pontoons while preserving the position of the center of gravity of the ship, the sum of weight, and moments in any direction from the middle. To simplify the calculations, a part of the load from the ship that falls on the pontoon and does not exceed 2% of the total weight of the ship is allowed (in this case, it is necessary to add this load to the adjacent pontoon). The load from the ship is distributed on the pontoons so that the center of gravity of each compartment remains in place.
According to [12], convenient expressions are given for the approximate distribution of the load from the ship on the pontoons of the dock. This distribution depends on the number of pontoons receiving the load, the relative center of gravity of the ship from the middle of its given length, and the mass of the ship. The formulas for the weight ordinates allow the dockmaster to distribute the load from the ship with sufficient accuracy when calculating the ballasting of the dock.
For an even number of pontoons (4 pontoons):
| (3) | |
| (4) | |
| (5) |
where is the relative distance of the ship’s center of gravity from the middle of its length; is the coefficient depending on the type of ship (Table 2); is the coefficient of completeness of the parabola of mass distribution on the ship (Table 2).
For an odd number of pontoons (5 pontoons)
| (6) | |
| (7) | |
| (8) | |
| (9) | |
| (10) |
The load intensity of the middle part of the ship is determined from the expression (11)
| (11) |
where is the given length of the ship is a multiple of the length of the pontoon.
Table 2 Coefficients and for some types of ships
| Ship Type | ||
| Surface ships and icebreakers | 0.70 | 1.5 |
| Passenger ships | 0.75 | 1.3 |
| Cargo ships | 0.80 | 1.25 |
| Barges and similar ships | 0.85 | 1.1 |
The indicated length of the ship is determined depending on its position in relation to the pontoons. To do this, the silhouette of each ship is applied to the side projection of the dock, and the number of pontoons that accept their weight is determined. If the edge of the ship overlaps the middle of the pontoon, it is considered that it accepts the load of the ship, and if it does not overlap, then this pontoon is not taken into account.
The support forces of the dock without the ship are equal to the weight of the dock, directed in the opposite direction, and evenly distributed along the length of the dock. When the ship is docked, additional support forces appear that balance the additional weight of the ship. When setting up several ships and balancing the dock system, it is necessary to distribute the ships so that the trim of the dock is equal to zero or is within the permissible limits. The easiest way to do this is to combine the common center of gravity of all ships with the center of gravity of the dock. In this case, the net support force will pass through the general center of gravity of the dock, and the intensity of forces along the length of the dock will be the same. Total support power , and intensity for a solid dock and for a pontoon dock (where is the sum of all intervals between pontoons.
Based on the obtained dependencies, the construction of a decision support system for the control of dock operations is considered. Moreover, the system should work as an interconnected complex of certain elements of the structure in the mobile application. In this case, the system, using certain tools, performs calculations, collects data, transmits and processes them. It provides the resulting information to the dockmaster of the floating dock to implement the functions of reliable docking of ships and maintenance of ship repair cycles at the enterprise. The structure of the mobile application for the decision support system is presented in Figure 3.
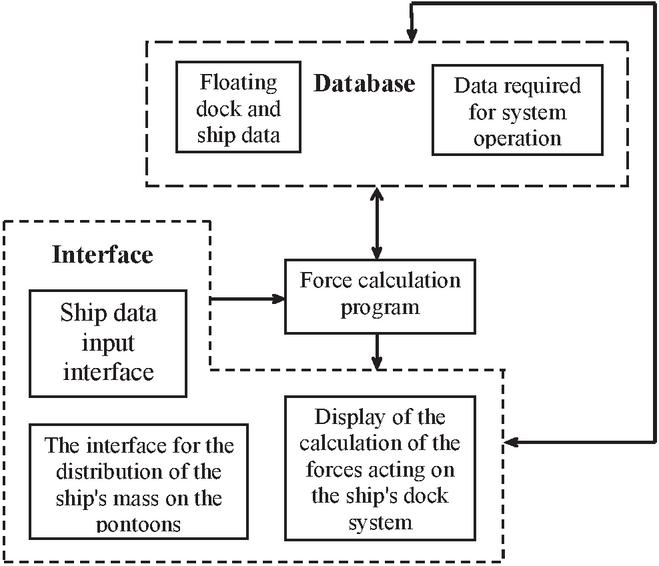
Figure 3 Functional structure of the mobile application for the decision support system.
This structure is a set of individual parts of the system that work together to form the interaction of subsystems at the program level. The database stores information about the floating dock and ships that are scheduled to be docked. The necessary information from the database is submitted to the interface, which can be used to correct the database itself. Based on information from the database or user interaction with the interface, the program calculates the distribution of forces of the floating dock-ship system. The life cycle of the application can be maintained by one person, in the simplest default configuration. However, over time, the application can be updated, add functionality, and link to a specific shipbuilding company.
4 Implementation of the Mobile Application for the Decision Support System of the Floating Dock Ballasting
In our case, Android Studio was used as the official IDE for development on Android. Android Studio offers a logically structured environment. The graphical interface can be written in the form of an XML file. The application will run in the emulator during development. Android Studio offers many features and makes app development more convenient. As an IDE, Android Studio’s function is to provide a decision support system interface for the developer. At the same time, Android Studio provides access to the Android SDK or ’Software Development Kit.
Java is used as the programming language for developing Android mobile applications. Android application code is written using the Java API provided by Google, which will then be compiled into class files. Android does not use the Java Virtual Machine (JVM) to execute class files, instead, it uses the Dalvik Virtual Machine, which is not a true JVM and does not work with Java bytecode. To run on Dalvik virtual machines, class files are compiled into DEX format (Dalvik EXecutable – Dalvik executable files. Access rights are described in the Android application manifest file. Android Studio also allows you to run code either through an emulator or a device connected to a computer.
In the process of creating a mobile application, an environment was chosen that performs the following functions in the current stable version: graphical support for Gradle; specialized refactoring and hotfixes for Android; Lint tools for performance, usability, version compatibility, and other tasks; the possibility of ProGuard integration; templates for creating common structures and components; a feature-rich layout editor that allows users to drag and drop UI components, the ability to preview layouts on multiple configuration screens; support for creating Android Wear applications; support for Google Cloud Platform, which allows integration of Cloud Messaging with “Firebase” (formerly “Google Cloud Messaging”) and Google App Engine; a virtual Android device (emulator) for running and debugging applications in Android Studio.
Android Studio simplifies the process of software development compared to non-professional environments, which are aimed not only at the development of applications and programs specifically for this operating system. To store, process, and add data during execution, the application must use a certain data store. In the development of this application, it was decided to use the lightweight SQLite relational database management system. The database management system is implemented as a library that can be connected to the project. SQLite does not require a separate process (server) and is compiled together with the main application code. This is a fairly fast and convenient way of saving and processing data in the application, which does not require a separate database server and does not load the mobile device. It allows processing and recording information in the database in a short time. The physical model of the database defines the way data is placed in the storage environment and the methods of access to this data, which are supported at the physical level. It differs from conceptual and logical models by a detailed description of the database structure using specific, clearly defined properties. It includes specifications for the selected database management system. The physical model is built exclusively based on logic and clearly follows its structure: an entity corresponds to a table, and an attribute corresponds to a column.
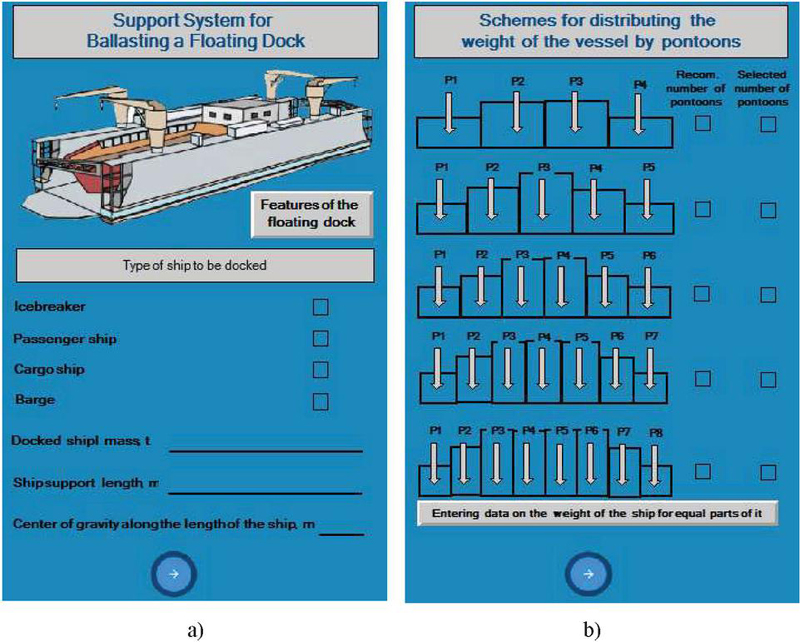
Figure 4 Data input interface: (a) window for entering the characteristics of the ship; (b) window for placing the ship by the number of pontoons.
Modeling of the main interfaces is presented in Figures 4, and 5 with the help of which the decision support system of the floating dock ballasting is implemented. In the process of creating interfaces, a collection of typical interface elements and a visual editor for their layout were involved. This gave a convenient preview of different states of the application interface, such as the ability to see how the interface will look for different versions of Android and different screen sizes. To create non-standard interface elements, a wizard for creating custom design elements was used, which supports the use of templates.
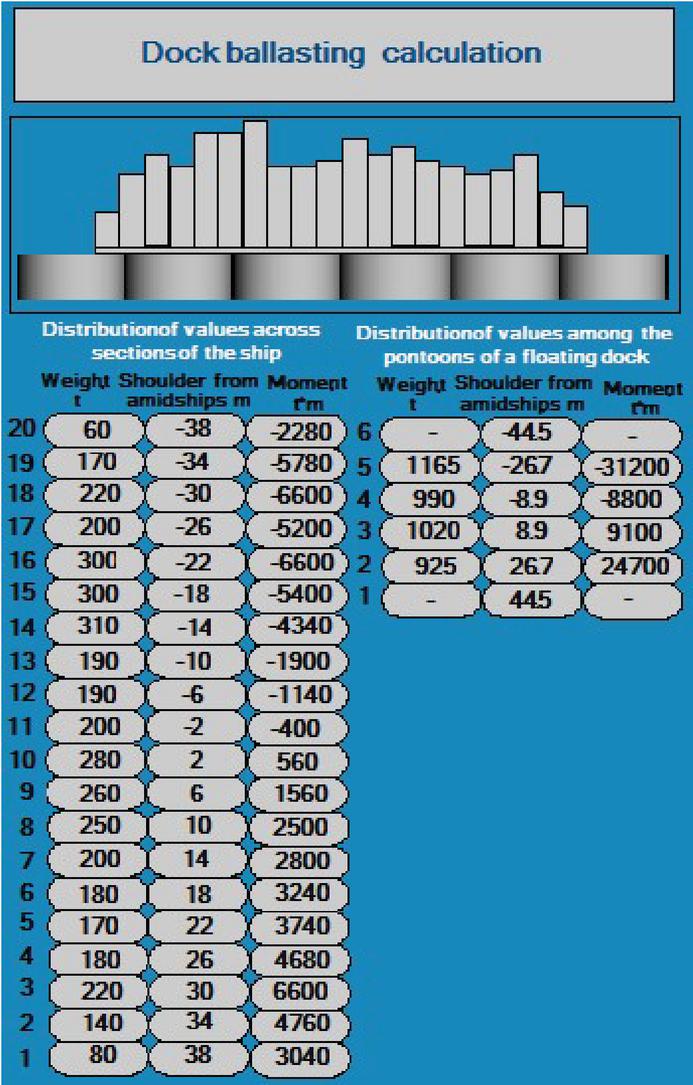
Figure 5 A window for displaying calculation information about the forces of the dock-ship system.
The interface includes a window for entering the characteristics of the ship that will be placed in a floating dock, and a window for placing the ship by the number of pontoons. Additionally, there is a window for outputting calculated information about the forces that will act in the process of docking the ship. Since the method for synthesizing a mobile program for ballasting a floating dock requires the presence of an initial database of a floating dock and ships of a certain structure, such a database was previously created for modeling.
The work of the application begins with the authorization of the dockmaster and the entry of the main parameters of the ship, such as: the type of ship, the weight of the ship, the length of the support surface of the ship, the center of gravity along the length of the ship. After entering the parameters of the ship and moving to the next interface, the program calculates the desired number of pontoons for the task of docking the ship. In this window, there are 5 options for sets of pontoons, and you can also enter data on the weight of the ship for its equal parts.
If the dock operator wants to change the number of pontoons, it can be done manually. Next, the program calculates the forces acting on the dock-ship system based on the coordinates of the centers of gravity of the ballast tanks, which depend on the volume of received ballast and the distributed mass of the ship on the pontoons. Depending on the calculation, the dockmaster estimates how much ballast is needed for a particular pontoon.
Only authorized users of the floating dock personnel have access to the software application. Also, only the dockmaster has the ability to make changes to the database and analytical calculation block manually. The rights of other users are limited only by means of monitoring the progress of the vessel’s dry-docking process. To ensure greater security, the web server maintains a secure encrypted VPN connection with external computers and smartphones connected to the Internet.
As an example, the calculation of the floating dock ballasting decision support system for setting up a ship with a mass of 4100 tons, the length of the supporting surface m, the center of gravity along the length of the ship m (aft from the middle) is considered. Moreover, the mass of the dock with full supplies (without ballast) tons, the length along the slipway deck m; width without anchor bars m; number of pontoons ; height of pontoons m; length of pontoons m; the height of the freeboard during operation m; the weight of the dock, spread over pontoons No 1 and 6, is 575 tons; No 2, 3, 4, 5 – 600 tons.
In the process of modeling, the ship’s load was set for 20 sections, which made it possible to obtain the distribution of individual ship masses on 6 pontoons of the floating dock. As a result of data processing, a detailed histogram of the impact of the ship on the pontoons of the floating dock was obtained. Data on the distribution of values for the ship and for the floating dock were also obtained, namely: mass, t; shoulder from the middle, m; moment, t⋅m.
Based on the data obtained, the dockmaster can calculate all the forces acting on the dock and distribute them across the pontoon, knowing the dock mass of the ship , the dock mass , and the mass of unpumped ballast . The calculated weight of the ballast is positioned so that it absorbs as much as possible of the excess supporting forces at the ends of the dock. The remaining ballast can be used as compensation ballast where is the displacement of the dock with the ship raised (determined from the dock flooding diagram for draft , where is the pontoon height; is the freeboard height of the pontoon during operation).
This software is capable of calculating the load on pontoons using its database of vessels of various classes. Calculation for staging multiple vessels is not possible in the context of this work. Placing several vessels on the slipway deck of a floating dock requires additional calculations and is a complex technical task. On the other hand, the possibility of placing several vessels in a floating dock is possible with subsequent recording of data in the database of the software application. In this case, the dockmaster will be able in the future to use this data in exceptional cases for docking ships with minimal additional calculations.
To further improve the developed decision support system and the presented mobile application for calculating the ballasting plan for a floating dock, fuzzy logic algorithms can be quite effectively applied [43–45]. Moreover, the optimization procedures of the developed support system to determine the required ballasting are highly promising and hold significant potential for enhancing its quality indicators. Through systematic refinement and fine-tuning, the fuzzy system can achieve higher levels of accuracy and precision in designing the ballasting plan. This optimization process entails a thorough examination of membership functions, rule sets, and input parameters, ensuring they are finely calibrated to capture subtle variations in the operating environment [46–48]. Additionally, the incorporation of advanced algorithms and artificial intelligence techniques could further elevate the system’s performance [49–52]. This heightened accuracy would not only bolster the safety and stability of docking operations but also lead to substantial improvements in overall operational efficiency and productivity. Thus, the ongoing efforts towards optimizing the decision support system represent a crucial avenue for advancing the state-of-the-art in ballasting plan determination, with far-reaching implications for diverse applications.
5 Conclusions
As a result of this study, it is possible to increase the level of automation of docking operations. This can be achieved through the development of a mobile application for a decision support system capable of determining the optimal option for loading ballast into floating dock compartments when setting up and launching ships.
Based on mathematical calculations of the impact of the ship on the floating dock and the rules for the development of mobile applications, a functional structure of the decision support system for ballasting the floating dock before docking the ship was formed. This functional structure was implemented in the dockmaster’s mobile application, which makes it possible to calculate the load parameters acting on the floating dock-vessel system, namely: mass, shoulder from the middle, and moment. The dockmaster, in turn, having this information, sets the required amount of ballast for one or another floating dock pontoon. As an example, the paper presents a calculation for docking up a 4,100-ton ship. Accordingly, the load forces of this ship are calculated with a graphical display of the distribution of the influence of 20 sections of the ship on 6 pontoons of the floating dock. In general, this decision support system with the implemented mobile application has the characteristics of a convenient interface and is easy to operate. It can provide data and suggestions for decision-making, and during its operation, it is actively replenished with a database of the docked ships.
Future research should be conducted in the direction of improving this system by taking into account the overall strength of the floating dock. Also, with the long-term use of this mobile application and obtaining a significant database, the possibility of intelligent data processing based on fuzzy logic and other machine learning techniques should be added. This will significantly affect the quality of the proposed decision support system.
References
[1] A.K. Dev, M. Saha, ‘Modeling and analysis of ship repairing time’, Journal of Ship Production and Design, vol. 31, no 2, pp. 129–136, 2015. DOI: 10.5957/JSPD.31.2.140016.
[2] E.A. Lundquist, ‘Science and an art: dry docks enable vital ship construction, maintenance and repair’, Seapower, pp. 10–13, 2015.
[3] G. Macangus-Gerrard, ‘Chapter 1 – Notes on dynamic positioning and ballast control for floating installations’, Offshore Electrical Engineering Manual (Second Edition), pp. 327–334, 2018. https://doi.org/10.1016/B978-0-12-385499-5.00034-0.
[4] S. Pani, N. Saha, S. R, ‘Analysis of spar with floating dock’, OCEANS 2022 – Chennai, Chennai, India, pp. 1–5, 2022. doi: 10.1109/OCEANSChennai45887.2022.9775532.
[5] C. Zheng, et al., ‘Wave-induced loads of floating dock’, International Conference on Remote Sensing, Environment and Transportation Engineering, Nanjing, pp. 1875–1879, 2011. doi: 10.1109/RSETE.2011.596 4664.
[6] P. A. Kostenko, ’Emergency braking of a non-self-propelled marine transport object using the tilting method’, Navigation, vol. 26, pp. 199–204, 2016. (in Russian)
[7] R. Gayathri, M.B.M. Khan, H. Behera, ‘Attenuation of wave force on a floating dock by multiple porous breakwaters’, Engineering Analysis with Boundary Elements, vol. 143, pp. 170–189. 2022. https://doi.org/10.1016/j.enganabound.2022.06.002.
[8] Z. Jiang, et al., ‘Design, modelling, and analysis of a large floating dock for spar floating wind turbine installation’, Marine Structures, vol. 72, pp. 1–29, 2020. https://doi.org/10.1016/j.marstruc.2020.102781.
[9] A. Saradagi, et al., ‘Safe autonomous docking maneuvers for a floating platform based on input sharing control barrier functions’, 2022 IEEE 61st Conference on Decision and Control (CDC), Cancun, Mexico, pp. 3746–3753 2022. doi: 10.1109/CDC51059.2022.9993109.
[10] O.S. Rashkovsky, et al., ‘Basics of designing floating docks’, Mykolaiv, RAL-poligraphy, 232 p., 2011. (in Ukrainian).
[11] Y. Hong et al., ‘Dimension control method for the erection of structures on offshore floating dock’, 2014 Oceans – St. John’s, St. John’s, NL, Canada, pp. 1–9, 2014. doi: 10.1109/OCEANS.2014.7003210.
[12] P. Y. Pavlov, A. N. Rogulin, ‘Efficiency of operation of docks’, Transport, 176p. 1987 (in Russian).
[13] X. Wen, A.G. Conde, J. Zhang, M. C. Ong, ‘Numerical study on the automatic ballast control of a Floating dock’, Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering – OMAE, pp. 1–8. 2023. doi: 10.1115/OMAE2023–102873.
[14] J. Zhang, X. Wen, M. C. Ong, ‘Development of a Floating Dock Numerical Model and the Ballast Water Distribution Strategy’, Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering – OMAE, pp. 1–11, 2023. doi 10.1115/OMAE2023–102996.
[15] S.E. Hirdaris, et al., ‘Loads for use in the design of ships and offshore structures. Ocean Engineering’, vol. 78, pp. 131–174, 2014. https://doi.org/10.1016/j.oceaneng.2013.09.012.
[16] ‘MAST’S user-friendly stability programs’, Nav. Archit., No 4, pp. 4–7, 1992.
[17] R. Yousefi, R. Shafaghat, M. Shakeri, ‘Hydrodynamic analysis techniques for high-speed planing hulls, Applied Ocean Research’, vol. 42, pp. 105–113, 2013. https://doi.org/10.1016/j.apor.2013.05.004.
[18] ‘Hull structure strength calculation’, HSB Int, 1999, Vol. 48, No 2, pp. 70–71.
[19] L.L. Nikolaeva, et al., ‘Development of methods for rapid assessment of vessel seaworthiness criteria’, Navigation, vol. 16, pp. 132–136, 2009. (in Russian).
[20] M. Y. Sokolov, ‘Method for generating a ship’s cargo program using a previously created database’, Navigation, vol. 18, pp. 169–172, 2010. (in Russian).
[21] K. Kiryanto, W. Amiruddin, Dwi Winanto Hari Fantio, ‘Perancangan floating dock untuk daerah perairan pelabuhan kota tegal’, Kapal Jurnal Ilmu Pengetahuan dan Teknologi Kelautan, vol. 10, no.2, pp. 88–97, 2013. doi: 10.12777/kpl.10.2.88-97.
[22] D. Kimera, F. N. Nangolo, ‘Improving ship yard ballast pumps’ operations: A PCA approach to predictive maintenance’, Maritime Transport Research, 2020, 1, pp. 1–15 doi: 10.1016/j.martra.2020.100003.
[23] D. Kimera, F. N. Nangolo, ‘Predictive maintenance for ballast pumps on ship repair yards via machine learning’, Transportation Engineering, 2020, 2, pp. 1–11. Doi:10.1016/j.treng.2020.100020.
[24] W. Fang, ‘Study on Mixed Sensitivity Control of Floating Dock Control System’, International Conference on Electrical and Control Engineering, Wuhan, China, pp. 5641–5642, 2010. doi: 10.1109/iCECE.2010. 1370.
[25] Y. Kondratenko, et al., ‘PLC based system for remote liquids level control with radar sensor’, 2015 IEEE 8th International Conference on Intelligent Data Acquisition and Advanced Computing Systems: Technology and Applications (IDAACS), Warsaw, Poland, pp. 47–52, 2015. doi: 10.1109/IDAACS.2015.7340699.
[26] W. Fang, ‘Study on closed-loop gain shaping control of floating dock control system’, 2010 International Conference on Computer, Mechatronics, Control and Electronic Engineering, Changchun, China, pp. 53–55, 2010. doi: 10.1109/CMCE.2010.5610388.
[27] A. Topalov, et al., ‘Stabilization and control of the floating dock’s list and trim: Algorithmic solution’, 2018 14th International Conference on Advanced Trends in Radioelecrtronics, Telecommunications and Computer Engineering (TCSET), Lviv-Slavske, Ukraine, pp. 1217–1222, 2018. doi: 10.1109/TCSET.2018.8336414.
[28] Y. Zhukov, B. Gordeev, A. Zivenko, A. Nakonechniy, ‘Polymetric Sensing in Intelligent Systems’, Chapter in the book: Advances in Intelligent Robotics and Collaborative Automation, River Publishers, pp. 211–234, 2015.
[29] A. Topalov, et al. ‘Features of the Construction a Specialized Computer Remote Parametric Control System of a Floating Dock’, 2023 International Conference on Advanced Computer Information Technologies (ACIT), Poland, pp. 517–520 2023. doi: 10.1109/ACIT58437.2023.10 275471.
[30] A. Topalov, D. Zaytsev, V. Zaytsev, S. Robotko, V. Golikov and V. Lukashova, ‘Features of the Construction a Specialized Computer Remote Parametric Control System of a Floating Dock’, 2023 13th International Conference on Advanced Computer Information Technologies (ACIT), Wrocław, Poland, pp. 517–520, 2023. doi: 10.1109/ ACIT58437.2023.10275471.
[31] G. Yang, H. Liang, C. Wu, ‘Deflection and inclination measuring system for floating dock based on wireless networks’, Ocean Engineering, vol. 69, pp. 1–8. 2013. https://doi.org/10.1016/j.oceaneng.2013.05.014.
[32] A. Topalov, O. Kozlov, Y. Kondratenko, ‘Control processes of floating docks based on SCADA systems with wireless data transmission’, 2016 XII International Conference on Perspective Technologies and Methods in MEMS Design (MEMSTECH), Lviv, Ukraine, pp. 57–61, 2016. doi: 10.1109/MEMSTECH.2016.7507520.
[33] X. Xiao-dong, L. Yin-dong, S. Cheng-meng. LabVIEW Based Real Time Control and Simulation System for Adjustment of Floating Dock. Journal of System Simulation, vol. 18, no. 11, pp. 3095–3099, 2006.
[34] V.V. Kozlyakov, G.N. Finkel, I.Y. Kharkhurim, ‘Design of dock support devices’, L.: Shipbuilding, 1973.
[35] ‘Annual number of global mobile app downloads 2017–2022’, Statista, 2019, https://bit.ly/2zTtudv.
[36] Y. Kondratenko, et al., ‘Inspection mobile robot’s control system with remote IoT-based data transmission’, Journal of Mobile Multimedia, Vol. 17, Is. 4. pp. 499–522, 2021. doi: 10.13052/jmm1550–4646.1742.
[37] R. Duro, et al. (Eds), ‘Advances in intelligent robotics and collaborative automation’, River Publishers, Aalborg, 2015. https://doi.org/10.13052/rp-9788793237049.
[38] Kondratenko, Y.P. et al., ‘Internet of things approach for automation of the complex industrial systems’, Proceedings of the 13th International Conference on Information and Communication Technologies in Education, Research, and Industrial Applications. Integration, Harmonization and Knowledge Transfer, 15–18 May, Kyiv, Ukraine, Ermolayev, V. et al. (Eds), ICTERI’2017, CEUR-WS, vol 1844, pp. 3–18, 2017. https://ceur-ws.org/Vol-1844/10000003.pdf.
[39] Y.P. Kondratenko, et al., ‘Automation of Control Processes in Specialized Pyrolysis Complexes Based on Web SCADA Systems’, in: Proceedings of the 9th IEEE International Conference on Intelligent Data Acquisition and Advanced Computing Systems: Technology and Applications (IDAACS), vol. 1, Bucharest, Romania, pp. 107–112. 2017. doi: 10.1109/IDAACS.2017.8095059.
[40] ‘Average Time Spent per Day with Mobile Internet Among US Adults, In-App vs. Mobile Web, 2015–2019’ eMarketer, https://www.insiderintelligence.com/chart/206443/average-time-spent-per-day-with-mobile-internet-among-us-adults-in-app-vs-mobile-web-2015-2019-hrsmins.
[41] A. Ahmad, K. Li; C. Feng, S. M. Asim, A. Yousif, S. Ge, ‘An Empirical Study of Investigating Mobile Applications Development Challenges’ IEEE Access, vol. 6, pp. 17711–17728, 2018. https://ieeexplore.ieee.org/document/8326707/authors\#authors.
[42] ‘Mobile Operating System Market Share Ukraine’, Statista, https://www.statista.com/statistics/669506/market-share-mobile-operating-ystems-ukraine/\#:~:text=Android’s\%20market\%20share\%20in\%20the,percentage\%20point\%2C\%20falling\%20at\%2017.98.
[43] O. Kozlov, G. Kondratenko, Z. Gomolka, Y. Kondratenko, ‘Synthesis and Optimization of Green Fuzzy Controllers for the Reactors of the Specialized Pyrolysis Plants’, Kharchenko V., Kondratenko Y., Kacprzyk J. (eds) Green IT Engineering: Social, Business and Industrial Applications, Studies in Systems, Decision and Control, vol. 171, Springer, Cham, pp. 373–396, 2019. https://doi.org/10.1007/978-3-030-00253-4\_16.
[44] Y.P. Kondratenko, O.V. Kozlov, ‘Mathematical model of ecopyrogenesis reactor with fuzzy parametrical identification’, Recent Developments and New Direction in Soft-Computing Foundations and Applications, Studies in Fuzziness and Soft Computing, Lotfi A. Zadeh et al. (Eds.), Berlin, Heidelberg: Springer-Verlag, vol. 342, pp. 439–451. 2016. https://doi.org/10.1007/978-3-319-32229-2\_30.
[45] V.M. Kuntsevich, et al. (Eds), ‘Control systems: theory and applications’, River Publishers, Gistrup, Delft, 2018. https://www.riverpublishers.com/book\_details.php?book\_id=668.
[46] Y. P. Kondratenko, O. V. Kozlov, L. P. Klymenko, G. V. Kondratenko, ‘Synthesis and research of neuro-fuzzy model of ecopyrogenesis multi-circuit circulatory system’ Advance Trends in Soft Computing, Studies in Fuzziness and Soft Computing, Berlin, Heidelberg: Springer-Verlag, 2014, vol. 312, pp. 1–14. https://doi.org/10.1007/978-3-319-03674-8\_1.
[47] Y.P. Kondratenko, A.V. Kozlov, ‘Parametric optimization of fuzzy control systems based on hybrid particle swarm algorithms with elite strategy’, Journal of Automation and Information Sciences, vol. 51, Issue 12, New York: Begel House Inc., pp. 25–45, 2019. doi: 10.1615/JAutomatInfScien.v51.i12.40.
[48] O.V. Kozlov, Y.P. Kondratenko, O.S. Skakodub, ‘Information technology for parametric optimization of fuzzy systems based on hybrid grey wolf algorithms’, SN Computer Science, vol. 3, issue 6, 2022. https://doi.org/10.1007/s42979-022-01333-4.
[49] A.I. Shevchenko, M.S. Klymenko, ‘Developing a model of artificial conscience’, in: 15th IEEE International Scientific and Technical Conference on Computer Sciences and Information Technologies, CSIT’2020, vol. 1, 23–26 Sept. 2020, Lviv-Zbarazh, pp. 51–54, 2020. doi: 10.1109/CSIT49958.2020.9321962.
[50] C.C. Aggarwal, ‘Artificial intelligence’, Springer International Publishing, 2021, 490 p. doi: 10.1007/978-3-030-72357-6.
[51] W. Ertel, ‘Introduction to artificial intelligence’, Springer International Publishing, 356 p., 2017.
[52] Z. Somogyi, ‘The Application of Artificial Intelligence: Step-by-Step Guide from Beginner to Expert’, Springer International Publishing, 431 p., 2021.
Biographies

Andriy Topalov is a Ph.D., Associate Professor at Admiral Makarov National University of Shipbuilding, Ukraine. He is a specialist in electrical engineering and got a master diploma in 2014. In 2020 obtained a Ph.D. degree in Computer Systems and Components. He worked in the framework of international scientific university cooperation during the implementation of international projects with the European Union: TEMPUS (Cabriolet), Erasmus + (Aliot), and DAAD-Ostpartnerschaftsprogramm (a project with the University of Saarland, Germany). His research interests include computer control systems, sensor systems, fuzzy logic, intelligent robotic devices, and measurement systems.

Yuriy Kondratenko is a Doctor of Science, Professor, Honour Inventor of Ukraine (2008), Corr. Academician of Royal Academy of Doctors (Barcelona, Spain), Head of the Department of Intelligent Information Systems at Petro Mohyla Black Sea National University (PMBSNU), Ukraine, Leading Researcher of the Institute of Artificial Intelligence Problems of MES and NAS of Ukraine. He has received (a) a Ph.D. (1983) and Dr.Sc. (1994) in Elements and Devices of Computer and Control Systems from Odessa National Polytechnic University, (b) several international grants and scholarships for conducting research at Institute of Automation of Chongqing University, P.R. China (1988–1989), Ruhr-University Bochum, Germany (2000, 2010), Nazareth College and Cleveland State University, USA (2003), (c) Fulbright Scholarship for researching in USA (2015/2016) at the Dept. of Electrical Engineering and Computer Science in Cleveland State University. Research interests include robotics, automation, sensors and control systems, intelligent decision support systems, and fuzzy logic.

Anatolii Shevchenko graduated from the Faculty of Physics at Donetsk State University with a major in “Radio Physics and Electronics.” In 1985, he defended his candidate dissertation, obtaining the scientific degree of a candidate, and in 1990, he defended his doctoral dissertation, earning the scientific degree of Doctor of Technical Sciences. In 2006, he was elected a Corresponding Member of the National Academy of Sciences of Ukraine in the field of «Computing Systems» by the General Assembly of the NAS of Ukraine. In 2015, he was appointed as the director of the Institute of Artificial Intelligence Problems of the Ministry of Education and Science of Ukraine and the National Academy of Sciences of Ukraine (Kyiv). Together with the Department of Informatics of the NAS of Ukraine, he initiated the international scientific and theoretical journal «Artificial Intelligence» and was appointed its Editor-in-Chief. His scientific interests include current issues of artificial intelligence, modeling human intelligence, modeling elements of human consciousness, breakthrough technologies in the field of artificial intelligence, and multidisciplinary aspects of artificial intelligence.

Valeriy Zaytsev received the degree of Engineer-shipbuilder in shipbuilding from Ukrainian State Marine Technical University in 1997, Candidate of Technical Sciences degree in Mechanics and designing of ships from Admiral Makarov National University of Shipbuilding in 2005, and the Doctor of Technical Sciences degree in Pipeline transport, oil and gas storages from Ivano-Frankivsk National Technical University of Oil and Gas in 2014. He is currently working as the Deputy Director of Science at Design Bureau IMT LLC. His research focuses on the design of high-speed ships and the automation of their control systems.

Oleksiy Kozlov is a Doctor of Science, Professor of the Department of Intelligent Information Systems at Petro Mohyla Black Sea National University (PMBSNU), Ukraine. He has received a master degree in electromechanics (2011) from Admiral Makarov National University of Shipbuilding, a Ph.D. degree (2014) and a Dr.Sc. degree (2022) in control processes automation from Odessa National Polytechnic University. In 2021 he became a laureate of the Award of the Parliament of Ukraine for Young Scientists. Since 2011 took part in the implementation of a number of international and state projects related to the automation of complex industrial plants, information technologies, intelligent control systems, robotics, and the Internet of things. His research interests include automation, intelligent information and control systems, fuzzy logic, bioinspired optimization techniques, and robotics.

Dmytro Zaytsev received the bachelor’s degree in ships and ocean engineering from Admiral Makarov National University of Shipbuilding in 2003, the master’s degree in ships and ocean engineering from Admiral Makarov National University of Shipbuilding in 2005, and the Candidate of Technical Sciences degree in Design and construction of ships from Admiral Makarov National University of Shipbuilding in 2010, respectively. He is currently working as the Deputy Director of Design at Design Bureau IMT LLC. His area of research includes design of high-speed vessels and automation of their control processes.

Volodymyr Golikov is a Doctor of science, Prof. received the Bachelor’s degree in Navigation and ship power engineering from Odessa State Maritime Academy in 2002, the Master’s degree in Navigation from Odessa National Maritime Academy in 2004, the Philosophy of doctorate degree in Navigation from Odessa National Maritime Academy in 2007, and Doctor of science in Navigation and Motion Control from National University Odesa Maritime Academy in 2021, respectively. He is currently working as the Professor at the Ship Handling department of Institute of Navigation, National University Odesa Maritime Academy. His research areas are navigation, motion control, maritime safety, port area, automatization and intelligent control of sea crafts. He has been serving as a reviewer for many highly-respected journals.
Journal of Mobile Multimedia, Vol. 20_3, 597–626.
doi: 10.13052/jmm1550-4646.2033
© 2024 River Publishers