Leveraging Massive Information from Diverse Devices: An Intelligent, Low-Cost, Voice-Controlled Autonomous Wheelchair for Enhanced Mobility
Asim Sattar1, Sayed Mazhar Ali2, Bhawani Shankar Chowdhry3, Mushtaque Ahmed Rahu4 and Sarang Karim5,*
1Department of Mechanical Engineering, Mehran University of Engineering and Technology, SZAB Campus, Khairpur Mirs, Pakistan
2Department of Electrical Engineering, Mehran University of Engineering and Technology, SZAB Campus, Khairpur Mirs, Pakistan
3NCRAAI, Mehran University of Engineering and Technology, Jamshoro, Pakistan
4Department of Electronic Engineering, Quaid-e-Awam University of Engineering, Science and Technology, Nawabshah-67480, Pakistan
5Department of Telecommunication Engineering, Quaid-e-Awam University of Engineering, Science and Technology, Nawabshah-67480, Pakistan
E-mail: sarangkarim@quest.edu.pk
*Corresponding Author
Received 30 May 2024; Accepted 02 December 2024
Abstract
This paper explores the development of an intelligent, low-cost, voice-controlled autonomous wheelchair designed to enhance mobility for individuals with disabilities. The wheelchair integrates diverse data from multiple devices, including a voice recognition module, joystick module, ultrasonic sensors, and solar panels, to provide a comprehensive and adaptive user experience. Leveraging massive information from these interconnected devices, the wheelchair employs artificial intelligence and machine learning algorithms to refine its responsiveness to users’ voice commands, improving adaptability to individual speech patterns over time. The solar panels contribute to the wheelchair’s sustainability by harnessing solar energy for battery charging, ensuring prolonged operation without frequent recharging. This study details the design methodology, fabrication process, and performance testing of the wheelchair, showcasing its capabilities such as an optimum speed of 0.89 m/s, a load capacity of 20 kg, and effective obstacle avoidance. Additionally, the paper addresses the wheelchair’s advantages, potential limitations, and future enhancements. By leveraging diverse data sources and intelligent systems, this innovative wheelchair aims to significantly improve mobility, individuality, and worth of life for beings with mobility challenges and the elderly.
Keywords: Artificial intelligence, autonomous wheelchair, low-cost mobility solutions, solar energy, voice-controlled mobility.
1 Introduction
Mobility solutions have undergone a revolution with the introduction of sophisticated technologies, especially for those with disabilities. This study encapsulates the incorporation of state-of-the-art advancements to produce an autonomous wheelchair at a reasonable cost. This method improves the wheelchair’s navigation and control by leveraging data from a variety of devices. Voice control makes the device more accessible and user-friendly by allowing users to control the wheelchair with basic spoken commands. This is a big step towards more inclusive and adaptive assistive technologies [13], as well as improving the quality of life for those with mobility issues. The ability of advanced technology [14, 15] to improve everyday experiences for persons with disabilities is demonstrated by the intelligent processing of data from numerous sensors to ensure safe, efficient, and personalized mobility [1].
Mobility is a fundamental human right and a prerequisite for social and economic participation [1]. However, millions of individuals worldwide suffer from some form of disability that impairs their ambulatory function [2], rendering them dependent on assistive devices such as wheelchairs. In Pakistan, a densely populated and underdeveloped country, the prevalence of disability is estimated to be around 15% of the total population, with mobility being the most common type of disability [2]. However, the availability and accessibility of wheelchairs in Pakistan are limited, especially for low- and middle-income families [3]. The existing wheelchairs are either manually operated or electrically powered, both of which have drawbacks such as high cost, low efficiency, high maintenance, and environmental impact [3]. Therefore, there is a need for a more innovative and sustainable solution that can provide mobility and independence to individuals with disabilities in Pakistan. Currently, the field of assistive technology has perceived significant advancements aimed at improving the lives of individuals with mobility challenges [3, 16]. This paper introduces a groundbreaking solution for enhancing accessibility and autonomy among individuals facing mobility constraints in Pakistan a solar-powered voice-controlled wheelchair. This innovative assistive device not only addresses the pressing need for cost-effective mobility solutions but also integrates cutting-edge artificial intelligence (AI) capabilities [4]. At the heart of this wheelchair’s intelligent functionality lies a sophisticated voice recognition module, empowered by machine learning algorithms [5]. This AI-driven module not only enables users to effortlessly control the wheelchair through intuitive voice commands but also exhibits a learning capacity. By continuously adapting to the unique speech patterns of users, the voice recognition system enhances its responsiveness, providing a personalized and seamless interaction experience [5, 9].
Moreover, the integration of a joystick module further diversifies the control options, ensuring flexibility to accommodate various user preferences. The amalgamation of solar power technology adds an environmentally sustainable dimension, with a dedicated solar panel harnessing energy to facilitate battery charging. This dual-powered methodology not only decreases reliance on old-fashioned charging methods but also supports with global shift towards eco-friendly solutions [21].
According to the World Report on Disability, more than one billion individuals worldwide, constituting approximately 15% of the global population, suffer from some form of disability [6]. The World Health Survey conducted in 69 countries revealed that 18.6% of individuals aged 18 and above reported experiencing moderate, severe, or significant difficulty in mobility [7]. Further research conducted in Fiji, India, Indonesia, Mongolia, and the Philippines indicated that one in five people faced challenges in walking or climbing stairs, with one in twenty individuals experiencing serious mobility issues.
The findings of the above-discussed report underscore the critical need for assistive devices in underdeveloped countries that not only aid individuals with disabilities but are also cost-effective. Pakistan characterized as an underdeveloped and densely populated country, harbors a substantial proportion of disabled individuals [8]. The census report of 2023 provides detailed insights into the disability ratio in Pakistan. Conducted by the Pakistan Bureau of Statistics five years after the previous census, the 2023 census estimated Pakistan’s total population to be 241,492,197 people. According to the census data, the province of Punjab emerged as the most populous, with a population of 110,012,442, followed by Sindh with a population of 47,886,051 [8]. Subsequently, Khyber Pakhtunkhwa (KPK), Baluchistan, and other respective areas of Pakistan contributed to the overall demographic distribution. The statistical representation of the census data is effectively depicted in graphical form as shown in Figure 1.
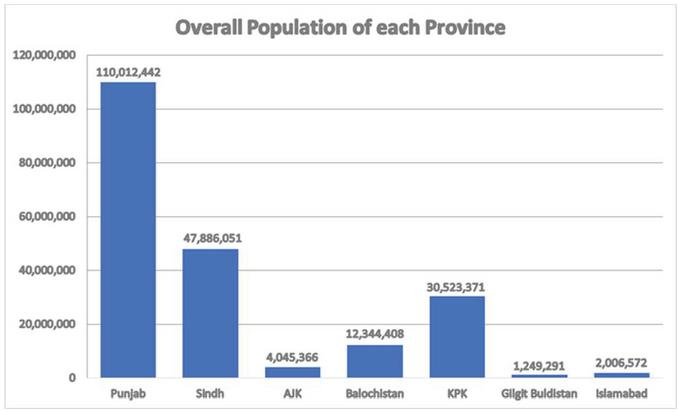
Figure 1 Representation of provincial population [8].
In Pakistan, the disability ratio is examined on a province-wide basis, and the accompanying graph illustrates the prevalence of disabilities categorized by age within each province as depicted in Figure 2. The comparative analysis of disability ratios is presented in the graph, with the province of Punjab leading the list, followed by Sindh, Khyber Pakhtunkhwa (KPK), and other respective areas of the country [8]. The graph effectively captures the distribution of disabilities across different age groups, providing valuable insights into the demographic landscape of disability prevalence in each province as illustrated in Figure 3.
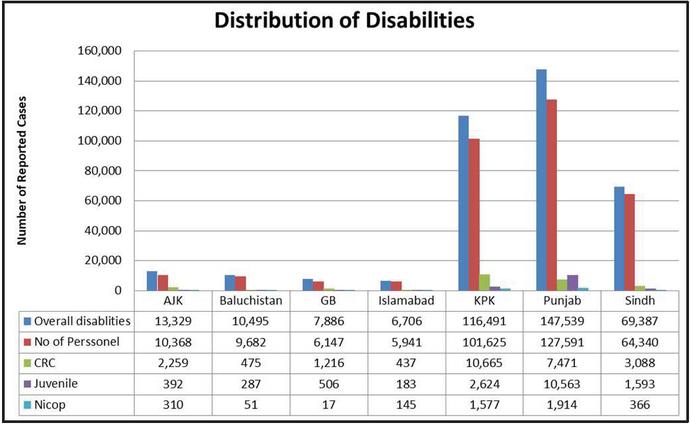
Figure 2 Provincial-wise disabilities.
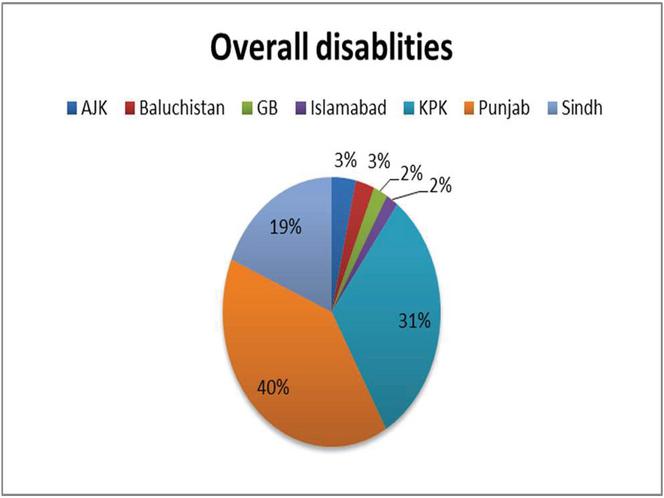
Figure 3 Disabilities ratio.
Globally, individuals with disabilities often encounter challenges in accessing continuous assistance for locomotion, particularly 24 hours a day [9]. To address this issue, the implementation of artificial assistance becomes imperative for the movement of disabled persons. The designed system aims to reduce the dependency of disabled individuals on others [10]. The Solar Powered Voice and Joystick-Controlled Wheelchair alleviate the strenuous efforts of disabled persons, empowering them to operate independently without external aid. Through the integration of voice and joystick controls, individuals with locomotive disabilities can seamlessly navigate from one location to another.
Traditionally, wheelchairs for the handicapped in Pakistan have been either manual or electric motor-driven [2]. The primary concerns for individuals with disabilities revolve around the operation, maintenance, and cost of wheelchairs. The proposed solar-powered voice and joystick-controlled wheelchair offer a cost-effective and more assistive solution compared to conventional electric wheelchairs. The project encompasses various engineering aspects, including control systems, power transmission, renewable energy, and embedded operating systems. Surveys serve as essential screening techniques for gathering information from a predefined group of respondents, facilitating the collection of data and experiences on diverse topics of interest. They can unveil insights into people’s habits, needs, and household dynamics, providing a means to quantify customer satisfaction and assess assumptions.
| Name of Hospital | Quantity | Type of Wheelchair |
| LUMHS Jamshoro | 13 | Manual |
| PUMHS Nawabshah | 9 | Manual |
| KMC Khairpur Mirs | 7 | Manual |
Surveys also contribute valuable context to exploratory research. In the context of our project, the first objective is to survey hospitals. Visits to different hospitals, including KMC Khairpur Mir’s, PUMHS Nawabshah, and LUMHS Jamshoro, were undertaken for this purpose. The survey data collected is presented as shown in Table 1.
The outcomes of the market and hospital surveys have led to the deduction that the current wheelchair offerings in Pakistan are prohibitively expensive for low- and middle-income families. The survey findings indicate that the wheelchairs accessible in hospitals are singularly functional, relying solely on manual operation. This poses a significant challenge for individuals with disabilities and the elderly, making it strenuous for them to navigate. The proposed wheelchair seeks to address this issue by providing a more accessible and user-friendly solution. Its primary objective is to enrich the worth of life for beings with mobility contests, particularly the disabled and the elderly, who face difficulties in movement.
The envisioned wheelchair is designed to facilitate various aspects of daily life, enabling users to manage routines, travel independently, visit hospitals, and pursue employment opportunities [10]. By incorporating user-friendly features and addressing affordability concerns, the proposed wheelchair aims to empower individuals with disabilities and the elderly, fostering increased independence and an improved overall quality of life. The remaining structure of the manuscript is organized as follows: in Section 2 methodology of the design and fabrication of SPWC is covered, in Section 3 the operation and control of the SPWC are discussed, in Section 4 results and analysis of testing and evaluation of SPWC are presented, in Section 5 implications and challenges of the SPWC are discussed, and in last Section 6 conclusion and suggestions for future directions for improvement are given.
2 Methodology
The designed and proposed solar power wheelchair consists of hardware components as well as software as shown in the block diagram, which is shown in Figure 4.
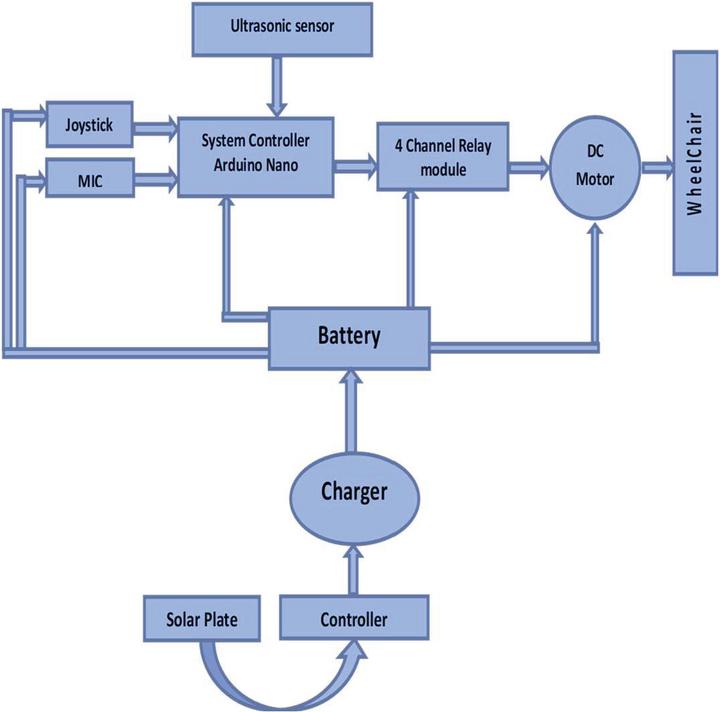
Figure 4 Block diagram.
2.1 Design of Prototype
The design objectives for the Solar Power Wheelchair (SPWC) included considerations for weight carrying capacity, optimum speed, obstacle detection, and solar power charging capability. The project utilized AutoCAD software for precise modelling as shown in Figure 5. Components were selected based on these objectives, with a focus on sturdy materials for weight support, motor specifications for speed optimization, sensors for obstacle detection, and high-efficiency solar panels for sustainable charging. The SPWC targets to increase mobility for beings with disabilities while incorporating innovative and eco-friendly features.
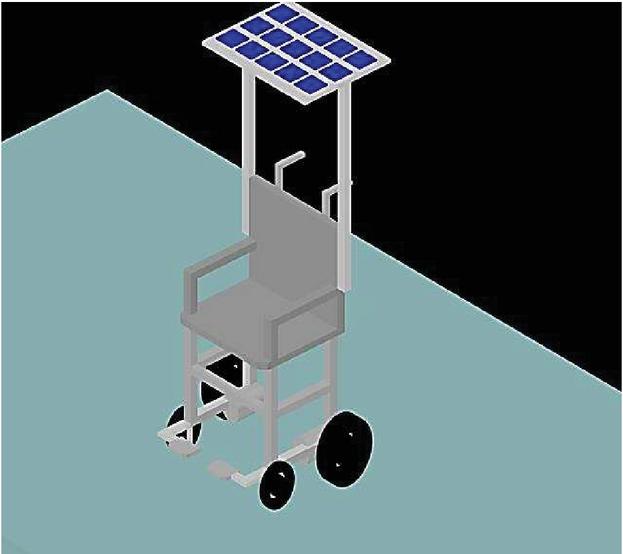
Figure 5 Model of solar power wheelchair in AutoCAD.
2.1.1 Motor
In selecting a motor for the solar power wheelchair, key considerations include simplicity, compactness, economic performance, durability, quiet operation, cost-effectiveness, and adaptability to various environments [11]. The process involves both quantitative factors like power efficiency and torque, as well as qualitative aspects such as user reviews and manufacturer reputation. A well-chosen motor contributes to the wheelchair’s efficiency, longevity, and overall success [12]. The comparison between the brush and brushless motors is shown in Table 2.
Table 2 Difference between brush and brushless
| Feature | Brush | Brushless |
| Budget | * | |
| Mean time between Repairs | * | |
| Mean time between failure | * | |
| Flat speed/torque | * | |
| Efficiency High | * | |
| Output High to frame size ratio Speed range High | * | |
| Thrilling atmospheres | * | |
| Ease in connections | * |
2.1.2 Weight carrying capacity for DC motor
Maximum mass carrying capacity 20Kg
Co-efficient of friction 0.02
The reaction force of friction R
Formula to overcome friction
| (1) |
Where R is the reaction force in Newton, is the coefficient of friction.
The mass of a wheelchair is 25 Kg if the person sits on it mass will be 40 Kg.
Reaction force mg
Reaction force 4510
Reaction force 450N
Now,
| (2) |
It means 9N fore is required to overcome the limiting friction. Now to attain optimum speed for wheelchairs we have used 10-watt DC motors. Based on quantitative and qualitative analysis and weight carrying capacity, GR 63x55 FAAC brushed DC motors are selected for solar power wheelchairs. The features of the GR 63x55 FAAC DC motor are specified in Table 3.
Table 3 Specifications of DC motor
| Parameters | Value |
| Type | GR 63*55 FAAC |
| Voltage | 12V |
| Power | 10W |
| Frequency | 50 Hz |
| Speed | 3450 rpm |
| Torque | 27 N.cm |
| Net weight | 2700g |
2.1.3 Arduino Nano
The Arduino Nano is a compact microcontroller based on the ATmega328 architecture, developed by Arduino cc [11]. It shares similarities with the Arduino Due Milanovic but differs in the absence of a power jack, replaced by a USB-B mini port. The key microcontroller is the ATmega328, renowned for its small size [12]. Some notable features of the Arduino Nano include its compact form factor and utilization of the ATmega328 controller, making it a popular choice for various projects as demonstrated in Table 4.
| Parameters | Value |
| Microcontroller | ATmega328 |
| Architecture | AVR |
| Operating Voltage | 5V |
| Flash Memory | Boot loader 2 KB from all 32 KB |
| SRAM | 2KB |
| Clock speed | 16 MHz |
| Analogue Input/output pins | 8 |
| EEPROM | 1KB |
| DC Current on IOs | 40 mA |
| Input Voltage | 7–12V |
| Digital Input/output pins | 22 |
| PWM output | 6 |
| Power Consumption | 19 mA |
| PCB Size | 1845 mm |
| Weight | 7 grams |
| Product code | A000005 |
2.1.4 Ultrasonic sensor
The wheelchair incorporates an ultrasonic module that emits ultrasonic sound waves and translates the echoes into electrical signals [9]. This functionality aids in obstacle avoidance during wheelchair navigation. Ultrasonic waves, being faster than normal audible sound, are employed to detect obstacles. The ultrasonic sensor is equipped with four pins: VCC and GND operate at 5 volts, while TRIGGER and ECHO connect to Arduino Nano at PIN D6 and D7, correspondingly. The sensor serves as a detector, identifying obstacles within a 20 cm range in front of the ultrasonic module. If an object is detected, the motor ceases forward or backward movement, enhancing safety during wheelchair operation.
2.1.5 Four-Channel relay
A 4-relay module is employed to control heavy loads with high voltage and current, such as AC, motors, and other substantial appliances [12], further, the specifications of the Relay module are demonstrated in Table 5. Designed to interface with small controllers like Arduino and PIC, the relay module facilitates the operation of motors in various directions, both alternate and direct current. To connect the 4-relay board with Arduino, the initial two connections involve linking the ground and power pins Arduino 5V connects to the VCC pin, and Arduino ground connects to a GND pin of the four-relay board. The relay board has 6 pins (VCC, 2IN4, GND), with 2IN4 serving as the four inputs, two of which are connected to motor 1 and motor 2 for motor control.
Table 5 Specifications of relay
| Parameters | Value |
| Supply Power | DC 5V |
| Current | 15 mA |
| Frequency | 40 Hz |
| Range Distance | 4 m |
| Resolution | 0.3 cm |
| Measured angle | 15 degree |
| Input pulse width | 10 S |
| Dimension in mm | 452015 |
2.1.6 LCD 16x2
The LCD (Liquid Crystal Display) is an electronic device utilized for data visualization. The LCD 162 configurations consist of 16 columns and 2 rows, allowing for the display of a total of 32 characters . Every character is composed of 58 (40) pixel dots. Therefore, the total number of pixels within this LCD can be measured as 32 columns multiplied by 40 pixels, resulting in 1280 pixels. LCD 162 shows primarily rely on multi-segment LEDs. While various display types exist, such as 82, 81, 161, and 102, +LCD 162 is extensively favoured in devices, DIY circuits, and electronic projects due to its cost-effectiveness, programmable friendliness, and ease of accessibility.
2.1.7 Joystick
A joystick is a device commonly used in computers to control the movement of an arrow on the display. In the context of a wheelchair project, the joystick serves as an analog sensor. It operates by allowing the pivoting of the shaft, which, in turn, rotates the contact arm. As the joystick’s knob is moved, a potentiometer instructs an arm to turn as needed by altering the resistance in the potentiometer. This mechanism facilitates precise and variable control over the wheelchair’s movements based on the user’s input through the joystick. The parameters for the selection of the joystick module are clarified in Table 6.
Table 6 Parameters of joystick module
| Parameters | Value |
| Operating Voltage | 5 V |
| Potentiometer | 10 K |
| Pin Interface Leads | 2.54 mm |
| Dimensions | 1.57 in 1.02 in 1.26 in |
| Operating temperature | 0 to 70C |
2.1.8 Voice recognition module
A voice recognition module is a compact and user-friendly device designed for speech recognition, capable of recognizing and supporting up to 80 different commands. The module operates on a talker-based system, where installed voice commands are stored in a large cluster. The module can effectively identify and respond to a set of 7 distinct commands, making it a versatile tool for voice-controlled applications.
Table 7 General features of solar charge controller
| Parameters | Value |
| Application | Solar electrification |
| Use | Indoor, battery charging using solar module |
| Operating | 0C to 60C |
| Temperature storage | 10C to 60C |
| Charge controller type | Two steps charging algorithm |
| Battery temperature compensation | 4 mV to 5 m/V/V/cell |
| Size of solar module | 40 WP |
2.1.9 Solar charge controller
A charge regulator, also known as a charge controller, plays a crucial role in managing and regulating the voltage or current supplied to batteries from solar panels. Its primary function is to prevent overcharging of batteries by modifying the incoming current and voltage. Many solar panels labeled as “12 volts” actually produce outputs in the range of 16 to 20 volts. Without a charge regulator, this higher voltage could lead to damage to the batteries over time. The charge regulator ensures that the batteries receive the optimal voltage for charging, typically around 14 to 14.5 volts, thereby preventing overcharging. Additionally, it serves to safeguard batteries from complete discharge, contributing to an extended battery life. In summary, the charge regulator acts as a critical component in a solar power system, optimizing the charging process and enhancing the overall longevity of the batteries. Furthermore, the feature of the solar charge controller is illustrated in Table 7.
In a solar power system, the battery is charged through solar panels, and the charge controller plays a crucial role in ensuring proper charging of the battery. The battery supplies direct current (DC) and voltage to an inverter, which converts the DC into alternating current (AC). Charge controllers are especially important for charging deep-cycle lead-acid batteries commonly used in solar PV systems. To protect against reverse polarity, two techniques are commonly employed: shunt and series diodes. In the shunt procedure, a fuse within the charge controller blows if the input is reversed-connected because the diode becomes forward-biased. This action prevents damage to the DC system, but it requires replacing the fuse after activation to restore functionality and protection.
2.1.10 Solar panel
The solar energy source is the sun. Photons, which are energy particles found in the sun, are converted into electricity by solar panels (sometimes referred to as “PV panels”), which can then be utilized to power electrical loads.
The solar plate collects energy from the sun and converts it into electricity that we may use at home. It is made up of photovoltaic cells. Each cell is constructed of pure silicon. This provides us with a negative charge, and boron is also utilized, which has a positive charge. Solar plates capture photons and produce electrons, which are then utilized to generate electricity. The energy created when photons impact the solar panel’s surface knocks electrons out of their atomic orbits and releases them into the electric field formed by the solar cells, which subsequently draws these liberated electrons into a directed current. The entire process might be referred to as photovoltaic effect.
2.1.11 Battery
Although lead acid batteries haven’t changed much since the 1880s, advances in materials and manufacturing techniques continue to increase energy density, life, and dependability. All lead acid batteries have flat lead plates submerged in an electrolyte pool. Most types of lead acid batteries require regular water addition, though low- maintenance models come with extra electrolytes calculated to compensate for water loss over time [11].
2.2 Fabrication of SPWC
After designing the model of a project, the manual wheelchair was purchased from the market. To fabricate SPWC as per design consideration, the fabrication process was continued in the following manner;
2.2.1 Motor installation
DC motors were purchased as per the required specification, and then they were welded near the hub of the rear wheels through the welding process. Before installation of motors, they were separately tested on battery.
2.2.2 Circuit design and testing
Arduino programming is done through Arduino Integrated Development Environment (IDE), and C++ computer programming language is used. Since Arduino Nano, joystick, voice module, and ultrasonic sensors operate on 5 volts that’s why buck convertor is used so that it could convert 12v to 5v. Moreover, Arduino Nano, joystick, voice module, and ultrasonic sensors are electronically connected through the soldering process in a circuit as demonstrated in Figure 6.
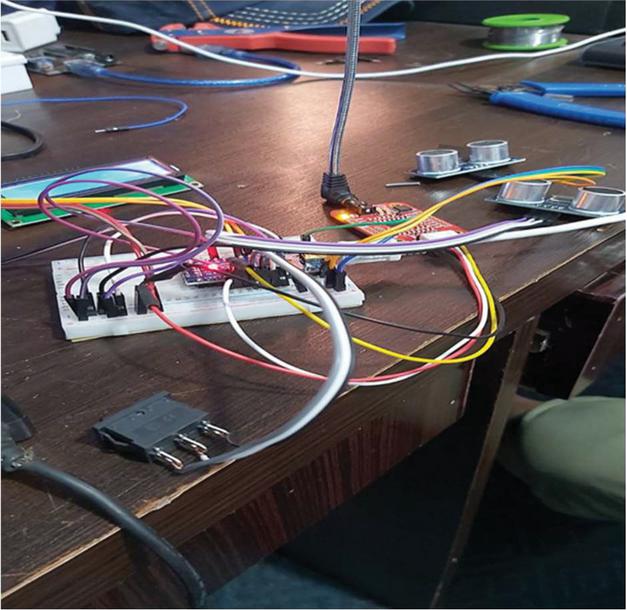
Figure 6 Circuit testing.
A channel relay was tested on all five commands before fitting to the wheelchair. The voice module was first programmed on voice commands then it was tested. Similarly, the joystick was checked and tested before the installation of the circuit to the wheelchair as shown in Figure 7.
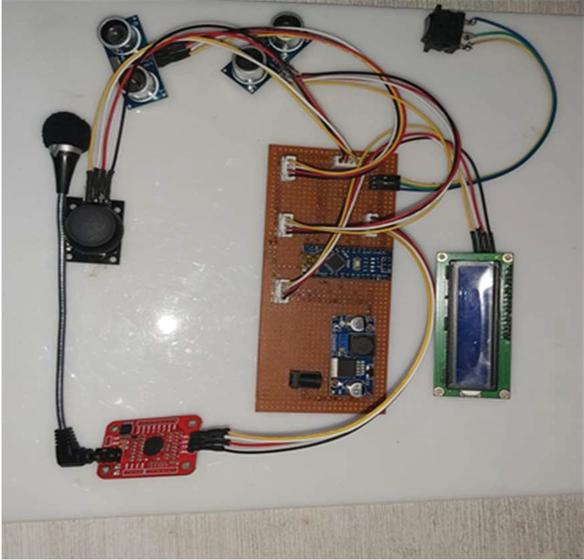
Figure 7 Main circuit.
2.2.3 Installation of solar panel and charge controller
The solar frame is made of iron rods having a square cross-section. Iron rods were cut using a grinder in the desired length. Then they were welded in the required shape using Arc welding. After the successful design and fabrication of the Solar Frame, the solar frame was installed on a wheelchair in the supportive welded columns on the wheelchair. A solar Panel was fitted in the Solar Frame. A charge controller was installed on the wheelchair. It was connected with a Solar Panel as well as a battery. The polarities of the Solar Panel, charge controller, and battery were connected properly by connecting the positive terminal to the positive and negative terminal to the negative terminal; furthermore, the final design of the prototype is demonstrated in Figure 8. Solar Charge successively controlled the input charge of the Solar Panel and provided the required charge to input the battery.

Figure 8 Prototype of SPWC.
3 Operation and Control
The solar power voice control wheelchair can be operated by two methods one is by giving a voice command through a voice recognition module and the second is manually by pressing a joystick module.
3.1 Manual Method
The joystick mode is very simple and the wheelchair can move in all directions as forward, backward, left, and right by pressing a joystick in the required direction. The wheelchair will be in the rest position when the joystick position is at the center.
3.2 Voice Command
The voice recognition module is used for giving voice commands. By giving the appropriate command word through the mic, as forward, backward, left, and right wheelchair moves in that direction as per the given command. When some obstacle comes in the front or back of the wheelchair it stops to avoid any accident.
3.3 Circuit Operation
Figure 9 demonstrates the interfacing of all components. The operation of the circuit is dependent on the joystick and microphone (Mic) connected to an Arduino Nano. The voice module is linked to D2 of the Arduino Nano, while the joystick is connected to A1 and A2. When the joystick is moved or specific instructions are given through the microphone, the Arduino Nano decodes these instructions and sends signals to 4-channel relays. The connections involve the first two couples of ground and power pins, where 5V is connected to the 4-relay VCC pin, and the Arduino ground is connected to the 4-relay board GND pin. Four relays are employed in a circuit, with two relays dedicated to motor 1 and two for motor 2 as shown in Figure 9.
The joystick/MIC controls the relays as follows:
Pushing forward activates IN1 and IN3.
Pushing backward activates IN2 and IN4.
Pushing left activates IN1 and IN4.
Pushing right activates IN2 and IN3.
The relays drive the motors in the specified direction: forward, backward, left, or right. This configuration allows for motor control based on joystick movements or voice commands through the microphone, enabling the wheelchair to move in desired directions as per user input.
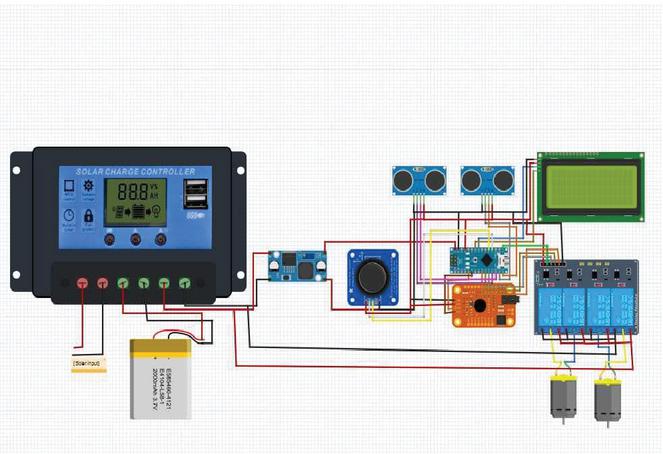
Figure 9 Circuit diagram of SPWC.
As Shown in Figure 4 of the Block diagram of the project, the battery is the main source that provides input power to all other components. From the Battery, power is supplied to DC motors, four-channel relay, Arduino Nano, LCD, voice module, joystick, and ultrasonic sensors. A buck converter is installed that controls the input voltage. The function of the Buck converter is to convert 12 volts of battery to 5 volts and then supply it to Arduino, Voice module. Joystick, LCD, Four Channel Relay, and Ultrasonic sensors. However, DC motors run on 12 volts. Now there are two modes of operation: joystick mode and voice mode. Users can shift between two modes by simply pressing the button provided on the circuit box. If a wheelchair is to be operated on joystick mode, then the user can press the joystick in forward, backward, left, or right direction. Wheelchairs will move in the selected direction. Four-channel relays executed the function of controlling the direction of the wheelchair. If a user is operating it on voice mode, then the wheelchair will move in the same four directions based on a command given by the user. While the wheelchair is in voice mode, sensors will be activated by Arduino Nano, Sensors are installed at the back and front of the wheelchair so that the wheelchair cannot strike an obstacle. In both modes of operation signal to the motors is sent by Arduino Nano after receiving a voice command or joystick signal.
Additionally in Figure 9 Solar Panel and Charge controller are displayed. The solar panel works as a backup of the battery. The function of solar panels is to convert solar energy to electrical energy. Solar panel output is 18 volts which is greater than the required power input for charging the battery. Hence for that, a solar charge controller is used that converts 18 volts to 12 volts and charges the battery, and when a battery is fully charged it automatically cuts the power supply.
4 Introduction Results Analysis and Discussions
This section highlights the results and analysis that were carefully tested with the SPWC. The results include solar panel readings and speed calculation of wheelchairs with weight and without weight.
4.1 Solar Panel Testing
The readings of the Solar panel were taken at 90 angles. Time was carefully noted from the start of solar panel readings. Output power, Voltage, and Current were recorded using a digital multimeter at different times with an hour gap between each successive reading. Results were constantly recorded from 8 AM to 6 PM. It can be observed from the graph that power output continues to increase up to 2 PM due to an increase in solar intensity, however, then afterward the 2 PM power output of the panel decreased. The variation of power, voltage, and current is displayed in Figure 10.
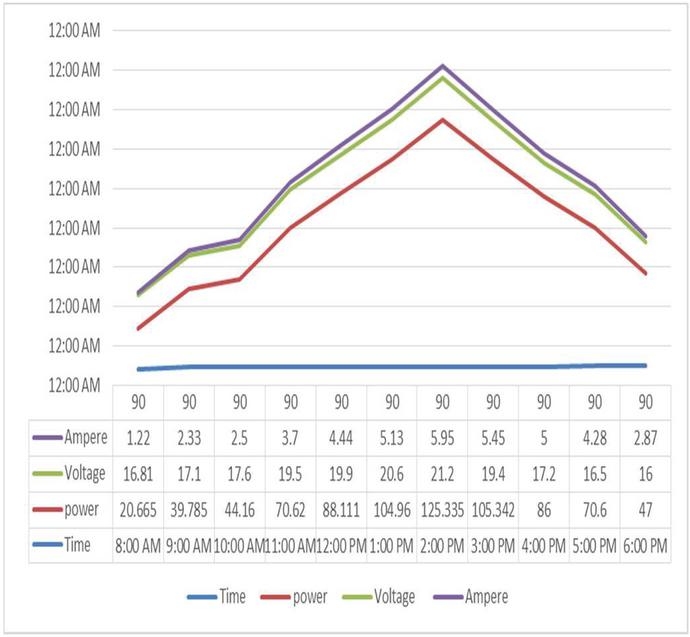
Figure 10 Variation in voltages, current, and power with time.
4.2 Battery Charing Test
We have only begun timing when the battery is completely dead to measure this, and we have ensured that the multimeter registered a zero. The equipment and timer were then turned on at roughly 8:30 a.m. We continued to record measurements every hour and closely monitored the multimeter until it climbed over 800 watts; at 840 watts, the operation was stopped and the time was taken, as shown in Table 8.
Table 8 Charging test results for 12V battery using a charge controller
| Time | Battery Voltage (V) | Charge Rate (%) | Status |
| 10:00 am | 12.05 | 14.0% | On charge |
| 10:30 am | 12.44 | 25.0% | On charge |
| 11:00 am | 12.60 | 30.0% | On charge |
| 11:30 am | 12.72 | 37.0% | On charge |
| 12:00 noon | 12.87 | 45.0% | On charge |
| 12:30 noon | 12.96 | 51.0% | On charge |
| 13:00 pm | 13.07 | 58.0% | On charge |
| 13:30 pm | 13.21 | 64.0% | On charge |
| 14:00 pm | 13.45 | 72.0% | On charge |
| 14:30 pm | 13.62 | 80.0% | On charge |
| 15:00 pm | 13.80 | 85.0% | On charge |
| 15:30 pm | 13.97 | 90.0% | On charge |
| 16:00 pm | 14.04 | 95.0% | On charge |
| 16:30 pm | 14.19 | 98.0% | Float Charge |
| 17:00 pm | 14.41 | 100% | Fully Charged |
4.3 Battery Charing with Solar Panel
It is important to match panel output with the controller that is to be used.
If the sunshine is 6 hours/day, the power output will be 150 watt/day
6*25 150 watts/day
If the battery that is to be charged is 7amp and 12-volt battery having a drain 50%. Then the power needed will be 42 watts for battery charging.
12*7/2 42 watt
The 25-watt solar panel will require 1.68 hours in a single day to charge a small battery.
4.4 Voice Command Results
Voice command tests of the wheelchair were conducted by giving the voice command of the saved person’s voice as well as the other person’s voice. It was observed during testing that the wheelchair operated on command of the user’s voice and activated the desired relays, the results are shown in Table 9. It did not recognize the other voice and, hence did not move as results are illustrated in Table 10. The wheelchair was tested on five commands that are forward, backward, right, left, and stop.
Table 9 Relay activation with user commands
| Voice Command | R1 | R2 | R3 | R4 | Results |
| Forward | 1 | 0 | 1 | 0 | Moving forward |
| Backward | 0 | 1 | 0 | 1 | Moving Back |
| Right | 0 | 1 | 1 | 0 | Moving Right |
| Left | 1 | 0 | 0 | 1 | Moving Left |
| Stop | 0 | 0 | 0 | 0 | Wheelchair stops |
Table 10 Relay activation with commands by other than the user
| Voice Command | R1 | R2 | R3 | R4 | Results |
| Forward | 0 | 0 | 0 | 0 | No action |
| Backward | 0 | 0 | 0 | 0 | No action |
| Right | 0 | 0 | 0 | 0 | No action |
| Left | 0 | 0 | 0 | 0 | No action |
| Stop | 0 | 0 | 0 | 0 | No action |
4.5 Discussion
After testing the all results, the solar power wheelchair is moved straight forward to calculate the velocity without load and with a load. The results achieved without load are demonstrated in Table 11, which shows the velocity in unloaded condition which is 0.89 m/s and then it was recorded under load of 20 kg. The results achieved as shown in Table 12, the velocity in loaded condition is found to be 0.63 m/s. Furthermore, the results in Table 12 show that as a wheelchair covers more distance its speed reduces. Moreover, it was also observed that velocity decreased with an increase in load.
Table 11 Trial of 1000 m without load
| Battery Consumption | Distance | Time (s) | Speed m/s |
| 17.7 V | 10 m | 8.11 | 1.23 |
| To | 20 m | 16.66 | 1.20 |
| 17.5 | 25 m | 27.42 | 0.93 |
| Consuming voltage 0.2 | 50 m | 56 | 0.89 |
| 100 m | 113 | 0.89 | |
| 200 m | 226 | 0.89 | |
| 300 m | 339 | 0.89 | |
| 400 m | 452 | 0.89 | |
| 500 m | 565 | 0.89 | |
| 600 m | 678 | 0.89 | |
| 700 m | 791 | 0.89 | |
| 800 m | 904 | 0.89 | |
| 900 m | 1017 | 0.89 | |
| 1000 m | 1130 | 0.89 |
Table 12 Trial of 100 m with a load of 20 Kg
| Consuming of Battery | Distance | Time (s) | Speed m/s |
| 17.7 V | 10 m | 17 | 0.59 |
| To | 20 m | 34.5 | 0.58 |
| 17.4 | 25 m | 43 | 0.58 |
| Consuming voltage 0.3 | 50 m | 86 | 0.58 |
| 100 m | 172 | 0.58 | |
| 200 m | 344 | 0.58 | |
| 300 m | 516 | 0.58 | |
| 400 m | 688 | 0.58 | |
| 500 m | 860 | 0.58 | |
| 600 m | 1032 | 0.58 | |
| 700 m | 1204 | 0.58 | |
| 800 m | 1376 | 0.58 | |
| 900 m | 1548 | 0.58 | |
| 1000 m | 1720 | 0.58 |
Moreover, the main features and characteristics available in solar power voice recognition wheelchairs are illustrated in Table 13.
Table 13 Main characteristics of solar power voice control wheelchair
| Parameters | Value |
| Turning angle (right/left) side | 90 |
| Time taken per rotation (joystick/voice) | 3sec |
| Total Turns to a complete revolution | 4 |
| Speed | 0.89 m/s |
| Speed in KM | 3.2 km/h |
| Diameter of rear wheel | 28 cm |
| Sensor range | 100 mm |
| Battery stand-by use | 13.5-13.8 volt |
| Battery charging time (if current is 1 imp) | 5 to 8 hours |
| Required least volts from solar panel to charge Battery 12V | 13.6 volt |
| Battery consumption time without weight | 10 to 12 hr |
| Battery consumption with weight | 5 to 6 hr |
| Weight carrying capacity | 20 kg |
4.6 Cost of Proposed Wheelchair
The list of components that were purchased during the fabrication of the voice and joystick-controlled wheelchair is discussed above. The required components can be purchased from the market at a given price or a little bit costly. This wheelchair is cheap compared to the electric wheelchair as shown in Figure 11. The comfort provided by the chair depends on the quality of the chair purchased, but the designed chair has the advantage that it can operate in voice mode with optimum speed.
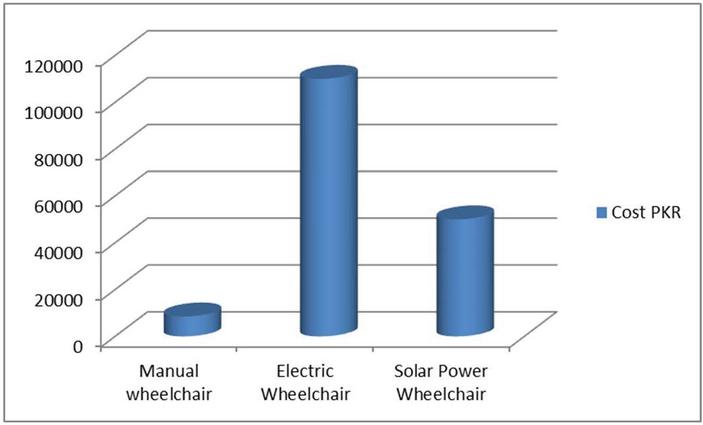
Figure 11 Cost comparison of wheelchairs.
5 Conclusion
This project aimed to address mobility challenges by designing a low-cost, voice-controlled autonomous wheelchair. Traditional manual wheelchairs often require assistance, causing user exhaustion. This innovative wheelchair enhances independence and reduces physical strain. Leveraging massive data from diverse devices, AI plays a key role in its functionality. The voice recognition module, powered by AI algorithms, allows hands-free control, adapting to users’ speech patterns for improved responsiveness.
Extensive testing showed the wheelchair’s efficiency, achieving optimal speeds and safe obstacle detection using AI-enabled sensors. Solar panels provide eco-friendly, sustainable energy, reducing reliance on traditional charging. Trials confirmed its versatility with both voice and joystick controls. The solar panel effectively charges the battery quickly, supporting renewable energy trends.
Compared to electric and manual wheelchairs, this intelligent design is cost-effective, user-friendly, and adaptable to various terrains. The integration of AI and diverse data sources enhances performance, setting the stage for future intelligent assistive technologies. This advancement fosters independence and improves the quality of life for individuals with mobility impairments.
6 Future Recommendations
After the successful fabrication and testing of the intelligent, low-cost, voice-controlled autonomous wheelchair, several enhancements are suggested to further improve its effectiveness. These recommendations leverage massive information from diverse devices to optimize performance:
i. Noise Filtering for Voice Module: Implement a filter to reduce background noise, ensuring that only the user’s voice is recognized, enhancing the accuracy and reliability of voice commands.
ii. Wireless Communication: Integrate wireless communication technologies to improve the wheelchair’s connectivity and control, allowing for more seamless operation and remote monitoring.
iii. Adjustable Solar Panel Frame: Modify the solar panel frame to be adjustable, optimizing solar energy capture throughout the day and increasing the efficiency of battery charging.
iv. Enhanced Sensor Range: Upgrade the sensors to extend their detection range, improving obstacle detection and navigation safety in diverse environments.
v. Manual Braking System: Install a manual braking system to provide users with an additional safety measure, ensuring better control and stopping capability when needed.
By incorporating these recommendations, the wheelchair can achieve even greater efficiency, user satisfaction, and adaptability, further enhancing the mobility and individuality of individuals with disabilities. Additionally, these improvements can enhance security aspects by ensuring safer navigation, protecting user data, and providing more reliable and secure operation overall [41].
Conflict of Interest
The authors state that none of their known financial conflicts or interpersonal connections might have had an impact on the work presented in this paper.
References
[1] “Disability in Pakistan,” https://www.nation.com.pk/01-Feb-2023/disability-in-pakistan [Accessed: Jan. 29, 2024].
[2] “Country Briefs: Pakistan,” https://disabilitydata.ace.fordham.edu/country-briefs/pk/ [Accessed: Jan. 27, 2024].
[3] “Roll the Dice on Accessible Pakistan,” https://www.opensocietyfoundations.org/voices/roll-dice-accessible-pakistan [Accessed: Jan. 25, 2024].
[4] P. Smith and L. Smith, “Artificial intelligence and disability: too much promise, yet too little substance?” AI and Ethics, vol. 1, pp. 81–86, 2021.
[5] K. R. Atchaiya, M. B. Arunachalam, and V. Divyaa, “AI-based smart and intelligent wheelchair,” Journal of Applied Research and Technology, vol. 18, pp. 362–367, 2020.
[6] “Disability,” https://www.who.int/health-topics/disability#tab=tab_1 [Accessed: Dec. 18, 2023].
[7] “Pakistan Population,” https://pakinformation.com/population.html [Accessed: Dec. 12, 2023].
[8] “Disability Statistics,” https://www.pbs.gov.pk/content/disability-statistics [Accessed: Dec. 12, 2023].
[9] F. Hussain, S. M. A. Shah, A. Ali, I. Ali, and H. Kumar, “Voice and hand controlled wheelchair system,” Journal of Applied Engineering & Technology (JAET), vol. 5, no. 1, pp. 31–39, 2021.
[10] F. Ahmed, R. Paul, M. M. Ahmad, A. Ahmad, and S. Singha, “Design and development of a smart wheelchair for the disabled people,” in Proc. Int. Conf. Information and Communication Technology for Sustainable Development (ICICT4SD), Dhaka, Bangladesh, 2021.
[11] S. M. A. Shah, “Multi-way controlled robot vehicle using Arduino and RF module,” Journal of Applied Engineering & Technology (JAET), vol. 5, no. 1, pp. 1–8, 2021.
[12] A. Dwivedi, R. Kumar, P. Omer, H. P. Singh, U. Rahmani, and K. Gupta, “Electric wheelchair for physically disabled person,” in Proc. Int. Conf. IoT, Communication and Automation Technology (ICICAT), 2023.
[13] M. A. Rahu et al., “An IoT and machine learning solutions for monitoring agricultural water quality: a robust framework,” Mehran Univ. Res. J. Eng. Technol., vol. 43, no. 1, pp. 192–205, 2024.
[14] L. L. Dhirani, E. Armstrong, and T. Newe, “Industrial IoT, cyber threats, and standards landscape: Evaluation and roadmap,” Sensors, vol. 21, no. 11, p. 3901, 2021.
[15] P. Vanin et al., “A study of network intrusion detection systems using artificial intelligence/machine learning,” Applied Sciences, vol. 12, no. 22, p. 11752, 2022.
[16] T. Kumar, B. Pandey, T. Das, and B. S. Chowdhry, “Mobile DDR IO standard based high performance energy efficient portable ALU design on FPGA,” Wireless Personal Communications, vol. 76, pp. 569–578, 2014.
[17] G. Haripriya, Y. Divyavani, A. R. Devi, and M. S. Kumar Reddy, “Arduino-based voice controlled robot,” Complexity International Journal (CIJ), vol. 25, no. 1, pp. 1320–0682, 2021.
[18] O. Kozlov, Y. Kondratenko, and O. Skakodub, “Intelligent IoT-based control system of the UAV for meteorological measurements,” Journal of Mobile Multimedia, pp. 555–596, 2024.
[19] P. K. Singh et al., “Multimodal driver drowsiness detection from video frames,” Journal of Mobile Multimedia, pp. 567–586, 2023.
[20] S. Srivastava and R. Singh, “Voice controlled robot car using Arduino,” in Int. Res. J. Eng. Technol. (IRJET), vol. 7, no. 5, 2020.
[21] M. A. Rahu et al., “Towards design of Internet of Things and machine learning-enabled frameworks for analysis and prediction of water quality,” IEEE Access, 2023.
[22] T. K. Hou, “Arduino-based voice-controlled wheelchair,” in J. Phys.: Conf. Ser., vol. 1432, no. 1, p. 012064, IOP Publishing, 2020.
[23] K. Meena, S. Gupta, and V. Khare, “Voice-controlled wheelchair,” Int. J. Electron., Electr. Comput. Syst., vol. 6, no. 4, pp. 23–27, 2017.
[24] M. V. Bramhe et al., “Voice-controlled wheelchair for a physically disabled person,” Int. J. Adv. Res. Electr., Electron. Instrum. Eng., vol. 6, no. 2, pp. 940–948, 2017.
[25] M. I. Malik, T. Bashir, and O. F. Khan, “Voice-controlled wheelchair system,” Int. J. Comput. Sci. Mobile Comput., vol. 6, no. 6, pp. 411–419, 2017.
[26] K. B. Rai, J. Thakur, and N. Rai, “Voice controlled wheelchair using Arduino,” Int. J. Sci., Technol. Manag., vol. 4, no. 6, pp. 6–13, 2015.
[27] T. N. Muneera and C. N. Dinakardas, “A voice-controlled wheelchair for physically challenged people with therapy unit,” Int. J. Eng. Res. Technol. (IJERT), vol. 8, no. 7, 2019.
[28] P. Kupkar, P. Pandit, N. Dhadhere, and P. P. Jadhav, “Android controlled wheelchair,” Imperial J. Interdiscip. Res. (IJIR), vol. 2, no. 6, 2016.
[29] A. S. and R. G. Nair, “Voice controlled wheelchair using Arduino,” Int. Adv. Res. J. Sci., Eng. Technol. (IARJSET), vol. 3, no. 3, Aug. 2016.
[30] T. Agrawal, “Review on voice recognition module working,” Int. J. Adv. Res. Comput. Sci. Softw. Eng., May 2014.
[31] S. D. Suryawanshi, J. S. Chitode, and S. S. Pethakar, “Voice operated intelligent wheelchair,” 2013.
[32] K. B. Rai, J. Thakur, and N. Rai, “Voice controlled wheelchair using Arduino,” Int. J. Sci., Technol. Manag., Jun. 2015.
[33] J. Bong and U. Jang, “Hyperledger Fabric-based reliable personal health information sharing model,” Journal of Mobile Multimedia, pp. 1009–1020, 2023.
[34] G. Azam and M. T. Islam, “Design and fabrication of a voice-controlled wheelchair for physically disabled people,” Int. J. Mod. Eng. Res. (IJMER), 2015.
[35] A. Kumar et al., “Speech recognition-based wheelchair using device switching,” Int. J. Emerg. Technol. Adv. Eng. (IJETAE), vol. 4, no. 2, Feb. 2014.
[36] S. D. Suryawanshi, J. S. Chitode, and S. S. Pethakar, “Voice operated intelligent wheelchair,” Int. J. Adv. Res. Comput. Sci. Softw. Eng., vol. 3, no. 5, May 2013.
[37] M. Prathyusha, K. S. Roy, and M. A. Shaikh, “Voice and touch screen-based direction and speed control of wheelchair for physically challenged using Arduino,” Int. J. Eng. Trends Technol. (IJETT), vol. 4, no. 4, Apr. 2013.
[38] G. Pires and U. Nunes, “A wheelchair steered through voice commands and assisted by a reactive fuzzy-logic controller,” J. Intell. Robot. Syst., vol. 34, pp. 301–314, 2002.
[39] V. G. Posugade, K. K. Shedge, and C. S. Tikhe, “Touch screen-based wheelchair system,” Int. J. Eng. Res. Appl. (IJERA).
[40] D. A. Bell et al., “Design criteria for obstacle avoidance in a shared-control system,” RESNA94, Nashville, 1994.
[41] L. L. Dhirani et al., “Ethical dilemmas and privacy issues in emerging technologies: A review,” Sensors, vol. 23, no. 3, p. 1151, 2023.
Biographies

Asim Sattar received a Bachelor’s degree in Mechanical engineering from Mehran University of Engineering and Technology SZAB Campus Khairpur Mirs Pakistan in 2021. He is currently working as a Trainee Engineer at Al-Noor MDF Lasani Board Division Plant Shahpur Jahania, Pakistan. His research areas include the Internet of Things, Renewable Energy, Material Engineering, AI, and Robotics. He is a lifetime member of the Pakistan Engineering Council.

Sayed Mazhar Ali received a Bachelor’s degree in Electronic engineering from Quaid-e-Awam University of Engineering and Technology Nawabshah, Pakistan in 2016, a Master’s degree in Industrial Automation and control from Quaid-e-Awam University of Engineering and Technology Nawabshah, Pakistan in 2022. He is currently working as a Lecturer at the Department of Electrical Engineering, Mehran University of Engineering and Technology SZAB Campus Khairpur Mirs, Pakistan. His research areas include the Internet of Things, Machine Learning, Deep Learning, Robotics, Smart Agriculture, Energy Systems, and Control Systems. He has been serving as a reviewer for many highly respected journals and international conferences. He is a lifetime member of the Pakistan Engineering Council.

Bhawani Shankar Chowdhry (Senior Member, IEEE) received the Ph.D. degree from the School of Electronics \& Computer Science, University of Southampton, U.K., in 1990. He is currently a Full Professor and former Dean of Faculty of Electrical Electronics and Computer Engineering, Mehran University of Engineering & Technology, Jamshoro, Pakistan. He is having teaching and research experience of more than 30 years. He has the honor of being one of the editors of several books Wireless Networks, Information Processing and Systems (CCIS 20), Emerging Trends and Applications in Information Communication Technologies (CCIS 281), Wireless Sensor Networks for Developing Countries (CCIS 366), and Communication Technologies, Information Security and Sustainable Development (CCIS 414), published by Springer Verlag, Germany. He has also been serving as a Guest Editor of Wireless Personal Communications, which is a Springer International Journal. He has produced more than 13 Ph.D. degrees and supervised more than 50 M.Phil./master’s Theses in the area of ICT. His list of research publication crosses to over 60 in national and international journals, IEEE and ACM proceedings. Also, he has Chaired Technical Sessions in USA, U.K., China, UAE, Italy, Sweden, Finland, Switzerland, Pakistan, Denmark, and Belgium. He is a member of various professional bodies including: the Chairman IEEE Karachi Section, Region10 Asia/Pacific, Fellow IEP, Fellow IEEEP, Senior Member, IEEE Inc., USA, SM ACM Inc., USA. He is a Lead Person at MUET of several EU funded Erasmus Mundus Program, including Mobility for Life, StrongTies, INTACT, and LEADERS. He has organized several International Conferences, including IMTIC08, IMTIC12, IMTIC13, IMTIC15, WSN4DC13, IEEE SCONEST, IEEE PSGWC13, and the Track Chair in Global Wireless Summit (GWS 2014), and the Chief Organizer of GCWOC’16, GCWOC’18 and GCWOT’20 in Universidad de Malaga, Malaga, Spain.

Mushtaque Ahmed Rahu received a B.Eng. degree in electronic engineering and an M.Eng. Degree in industrial automation and control from the Quaid-e-Awam University of Engineering, Science and Technology (QUEST), Nawabshah, Pakistan, in April 2010 and 2016, respectively, where he is currently pursuing the Ph.D. degree. His research interests include the Internet of Things, wireless sensor networks, Machine learning, and Smart agriculture. He is a Lifetime Member of the Pakistan Engineering Council.

Sarang Karim received the B.Eng. degree in electronic engineering from Mehran University of Engineering and Technology (MUET), Jamshoro, Pakistan, in April 2011, and the M.Eng. degree in electronic systems engineering from the Institute of Information and Communication Technologies (IICT), MUET in 2015. He received the Ph.D. degree from the IICT, MUET, Jamshoro in December 2023. He was attached with ETSI, Universidad de Malaga, Malaga, Spain, as a Mobility Researcher from September 2017 to February 2018. He is currently working as an Assistant Professor in the Department of Telecommunication Engineering, Quaid-e-Awam University of Engineering, Science and Technology, Nawabshah, Pakistan. He published more than 26 research papers in reputed journals and conference proceedings. His research interests include Internet of Things, wireless sensor network, underwater wireless sensor networks, and smart agriculture. He is a Lifetime Member of Pakistan Engineering Council.
Journal of Mobile Multimedia, Vol. 20_6, 1181–1210.
doi: 10.13052/jmm1550-4646.2062
© 2025 River Publishers