Enhancing CNN Weights for Improved Routing in UAV Networks for Catastrophe Relief with MSBO Algorithm
Sachin Kumar Gupta1,*, Suhail Mohi Ul Din2, Kamal Upreti3, Shubham Mahajan4,* and Saroj S. Date5
1Department of Electronics and Communication Engineering, Central University of Jammu, Samba-181143, Jammu, (UT of J&K), India
2Department of Electronics and Communication Engineering, Indian Institute of Technology, Bhilai, Chhattisgarh – 491002, India
3Department of Computer Science, Christ University, Delhi NCR-201003, India
4Amity School of Engineering and Technology (ASET), Amity University, Gurugram, Panchgaon, Haryana-122412, India
5Department of Artificial Intelligence and Data Science, CSMSS Chh. Shahu College of Engineering, Chh. Sambhajinagar, Maharashtra, India
E-mail: sachin.ece@cujammu.ac.in; suhailmohiuldin@gmail.com; kamalupreti1989@gmail.com; mahajanshubham2232579@gmail.com; saroj.date@gmail.com
*Corresponding Author
Received 03 November 2024; Accepted 23 November 2024
Abstract
UAVs have become key in various applications lately, from catastrophe relief to environmental monitoring. The plan of powerful and reliable directing protocols in UAV networks is seriously hampered by the dynamic and habitually eccentric mobility patterns of UAVs. This study proposes a novel technique to beat these challenges by utilizing the Modified Smell Bees Optimization (MSBO) algorithm to upgrade the weights of CNNs. This study’s principal objective is to further develop UAV network routing decisions by using CNNs’ ability for design recognition and the Modified SBO’s optimization abilities. Our methodology comprises of randomly relegating CNN weights to a populace of bees at start, evaluating their wellness by fitness of directing performance, and iteratively fine-tuning these weights utilizing local and global search procedures got from bee searching. Broad simulations and performance evaluations show that our recommended approach incredibly expands the general dependability of UAV’s, brings down communication latency, and improves directing productivity. Future exploration in UAV network improvement gives off an impression of being going in a promising direction with the integration of CNNs for pattern recognition and the Modified SBO for weight enhancement. In addition to progressing UAV routing conventions, this work sets out new open doors for machine learning applications of bio-inspired optimization algorithms.
Keywords: Modified smell bees optimization (MSBO), routing protocols, optimization algorithms, UAV networks, CNN, catastrophe relief.
1 Introduction
UAVs have drawn in a great deal of interest and are being utilized in different contexts, including military tasks, agricultural observation, calamity management, and environmental monitoring [1]. These purposes utilize UAVs’ extraordinary capacities, like their incredible portability, versatility in deployment, and ability to work in challenging to-reach at regions [2, 3]. Notwithstanding these advantages, planning and implementing compelling directing protocols inside UAV networks is seriously hampered by the inborn mobility and dynamic nature of UAVs [4].
UAV networks have a unique topology, implying that node positions and network connectivity change often [5–8]. This requires the making of versatile and adaptable routing methodologies. In such profoundly powerful conditions, conventional routing protocols frequently fail, expanding communication latency, diminishing unwavering quality, and coming about in poor network performance [9–11]. Accordingly, clever solutions are frantically expected to defeat these impediments and further develop UAV networks’ overall efficiency [6].
CNNs have shown noteworthy outcomes in a range of pattern recognition and machine learning undertakings lately [7]. They are valuable for various applications like picture recognition and speech, natural language handling, and network optimization because of their ability to gain from and extract highlights from complex information [8]. However, the most ideal way to tune CNNs’ weights altogether affects how well they perform, which thusly influences how well they can figure and make decisions [9]. However, current approaches have the following drawbacks:
1. Insufficient Scalability: As networks grow in size, many of the protocols in use today find it difficult to sustain performance.
2. Energy Inefficiency: The majority of studies still do not fully study the optimization of energy usage.
3. Limited Hybrid Approach Integration: Few studies integrate bio-inspired optimization strategies for real-time routing choices with the advantages of deep learning, such as Convolutional Neural Networks (CNNs).
These disparities underscore the necessity of novel strategies that take advantage of CNNs’ capacity for pattern recognition and bio-inspired algorithms’ capacity for optimization in order to tackle the intricate problems associated with UAV routing.
The Modified SBO algorithm is acquainted in this examination to address CNN weight improvement for better routing in UAV networks. The SBO algorithm consolidates global and local search techniques to proficiently investigate and take advantage of the search space. It was propelled by the searching behavior of bees. Our technique looks to further develop the routing choices in UAV networks by combining the Modified SBO algorithm’s optimization powers with CNNs’ assets in pattern recognition.
As indicated by the recommended methodology, a populace of bees is first given CNN weights indiscriminately, and afterward their fitness is evaluated utilizing measurements connected with routing performance, similar to communication latency and network dependability. The Modified SBO algorithm further develops network execution and routing proficiency by optimizing these weights through iterative refinement.
1.1 Research Motivation
This study is motivated by the potential to overcome these limitations by integrating CNNs with the Modified Smell Bees Optimization (MSBO) algorithm. While CNNs excel at learning and recognizing complex mobility patterns, MSBO provides an effective mechanism to fine-tune CNN weights, optimizing routing performance in dynamic UAV networks. By addressing gaps in scalability, energy efficiency, and adaptability, this research aims to improve key performance metrics, including packet delivery ratio, end-to-end delay, and throughput, ultimately enhancing the reliability and efficiency of UAV networks in real-world applications.
1.1.1 Main contributions
The following are the main contributions of this work:
1. Hybrid Model Integration: To improve routing choices in UAV networks, this innovative hybrid approach combines Convolutional Neural Networks (CNNs) with the Modified Smell Bees Optimization (MSBO) algorithm.
2. Improved Routing Performance: Shows notable gains over conventional routing protocols like AODV and DSR in terms of packet delivery ratio (PDR), throughput, end-to-end latency, and energy consumption.
3. Scalability and Energy Efficiency: Both are addressed by demonstrating the suggested method’s resilience in large networks and by optimizing energy usage to extend the operation of UAV networks.
4. Real-World Applicability: Offers a thorough approach to routing in dynamic UAV networks, emphasizing useful uses where low latency and high reliability are essential, such environmental monitoring and disaster relief.
1.2 Section Summary
The difficulties in routing UAV networks were presented in this part, with a focus on their erratic and dynamic mobility patterns. It brought attention to the shortcomings of conventional routing protocols as well as the capacity of deep learning models – like Convolutional Neural Networks (CNNs) – for pattern detection and judgment. By adjusting CNN weights for optimal routing, the Modified Smell Bees Optimization (MSBO) method helps to overcome these difficulties, as the introduction already explained. This lays the groundwork for the suggested CNN and MSBO integration, which will improve the effectiveness and performance of UAV network routing algorithms.
2 Related Works
With the presentation of coordinated networks like Space–Air–Ground Integrated Networks (SAGINs), there has been a lot of examination directed on the improvement of routing algorithms for UAV networks as summarized in Table 1. The objective of these networks is to give effective communication and consistent inclusion across different domains. The importance of FANETs in SAGINs is underscored by [7], who likewise analyze the latest improvements in the field and the current directing protocols. They stress that it is so essential to have solid, reliable, and powerful routing algorithms to oblige the developing size of networks and the assortment of client needs.
Authors [5] utilize a dueling deep Q-network (DLGR-2DQ) to propose a delay-aware and link-quality-aware geological directing protocol for UAV hoc networks (UANETs). Their strategy beats traditional protocols concerning packet delivery ratio and end-to-end delay, really resolving the issues of high mobility, variable connection quality, and heavy traffic loads in UANETs. Energy efficiency in WSNs utilized in accuracy agriculture is the primary subject of [15] study. To further develop clustering accuracy and network performance, they present a multi-objective clustering system combined with CNN. Their methodology features the capability of deep learning in upgrading energy utilization in wireless sensor networks (WSNs) by essentially expanding network lifetime, throughput, classification accuracy, and packet delivery ratio. [16] examine the improvement of UAV coordinates and relay path selection using a graph neural network (GNN)-based strategy with regards to 6G UAV-IoT organizations. Their method gives a versatile and solid answer for UAV relay networks, successfully addressing the challenges introduced by large-scale networks and dynamic conditions.
An ideal routing algorithm for UAV delivery networks is developed by [17], who consider the capacity to load and extreme range of UAVs as well as limiting conveyance distances. Their algorithm shows that it is attainable for UAV delivery activities by productively working out the quantity of in-service UAVs per terminal and upgrading the allotment of UAVs to clients. For UAV-assisted mobile-edge computing (MEC) Internet of Things networks. Authors of [18] developed a multi-hop task directing arrangement that utilizes IRSs to further develop task offloading and lower energy utilization. Their diagram based heuristic arrangement integrates a CNN to additionally limit decision-making delays and performs better compared to customary plans, particularly when IRSs are deployed. A bunch based named information routing convention (CNN) for vehicular networks (VANETs) is presented by [19]. Particularly in highly mobile networks, their strategy further develops network performance measurements like data delivery ratio, end-to-end delay, and complete transmitted traffic by partitioning the network utilizing the Hamming distance method and using a hybrid communication model.
Authors of [20] utilize a multi-agent deep reinforcement learning approach (MAQMIX) to concentrate on packet directing in dynamic multi-hop UAV relay organizations. In contrast with baseline schemes, their algorithm fundamentally develops network throughput, diminishes congestion, and limits transmission time by advancing UAV directions, frequency resource designation, and next-hop selection. Article [21] utilize deep reinforcement learning with a successive model to research joint cluster head selection and direction arranging in UAV-helped IoT organizations. Their methodology is versatile and viable for UAV-IoT frameworks, as proven by its near-optimal energy utilization performance and solid capacity to sum up to bigger issue sizes without retraining. Article [22] utilize a consolidated MAC layer and directing protocol optimization algorithm to address energy utilization improvement in MANETs. Through the usage of lithium-ion battery models’ properties, their technique further develops energy proficiency and has expected applications in smart cities and the military. The potential of deep learning and optimization methods to enhance UAV network routing performance has been investigated in recent research. Graph neural networks (GNNs) have lately surfaced as a viable method for tackling routing issues in dynamic networks like unmanned aerial vehicles (UAVs), despite the fact that machine learning models such as convolutional neural networks (CNNs) have shown significant pattern recognition skills.
1. Routing Optimization with Graph Neural Networks (GNNs): GNNs have demonstrated great potential for routing optimization across a range of network types, including UAV networks. In order to solve scalability and adaptability concerns in large-scale networks, [16] have studied Joint Flying Relay Location and Routing Optimization for 6G UAV-IoT Networks using a GNN-based technique. By simultaneously optimizing relay locations and routing paths, the method showed that it could improve UAV network performance and guarantee dependable communication even in extremely dynamic situations. This is especially crucial for 6G networks, as UAVs are anticipated to act as flying relays to provide uninterrupted connectivity over wide regions. In terms of network performance and energy efficiency, the GNN-based solution fared better than conventional optimization techniques, such as genetic algorithms.
2. The study “Graph Neural Networks for Routing Optimization: Challenges and Opportunities” outlines the opportunities and difficulties related to using GNNs for routing optimization in unmanned aerial vehicles. The complexity of large-scale dynamic UAV networks, whose topology is continuously shifting as a result of UAV mobility, is one of the main obstacles. Because GNNs can effectively handle graph-based data structures – in which every UAV node is dynamically connected to other nodes – they are well-suited to tackle this problem. Through the use of GNNs, researchers have been able to optimize UAV networks’ communication paths while taking latency, energy economy, and overall network performance into account. The need for hybrid models that combine GNNs with other machine learning techniques for improved performance in real-time, highly dynamic scenarios is one of the research needs that this study also found.
3. CNNs and GNNs for UAV Network Routing: A number of recent studies have put forth hybrid models that optimize routing decisions by combining the advantages of CNNs and GNNs. CNNs are good at finding spatial patterns in UAV mobility data, while GNNs are good at capturing the interaction between network nodes and improving path selection based on topological information. Researchers have demonstrated increases in routing efficiency and network adaptability by combining these methods. Combining CNNs for mobility prediction and GNNs for topological analysis offers a promising approach to UAV network routing optimization since it combines the advantages of both technologies: CNNs’ strong pattern recognition and GNNs’ effective optimization skills [23].
4. Present Research Limitations and Gaps: In spite of these developments, there are still a number of gaps in the literature. Numerous current techniques, such as GNN-based methods, frequently concentrate on particular facets of network optimization (such as throughput, energy efficiency, or delay minimization) without thoroughly addressing all performance measures. Additionally, there is still much to learn about the integration of CNNs and GNNs in UAV networks. Although both strategies have demonstrated effectiveness when used alone, the research has not adequately explored how they might be combined to optimize network topologies and routing simultaneously. Furthermore, the practical consequences of these models in actual UAV applications – where mobility patterns are extremely unpredictable and energy restrictions are crucial – are not taken into account in many research [24, 25].
2.1 Research Gap and Contribution
The analysis of current methods reveals important developments in UAV network routing, such as the incorporation of different machine learning and optimization strategies. There are still a number of shortcomings, though, including the limited use of hybrid models that combine bio-inspired optimization and deep learning (like CNNs) for routing decisions, poor scalability in dynamic UAV environments, and a lack of attention to energy consumption reduction in addition to performance metrics like latency and throughput. By presenting a unique combination of Convolutional Neural Networks (CNNs) and the Modified Smell Bees Optimization (MSBO) method, our work fills these gaps. The suggested approach uses CNNs for reliable pattern recognition and MSBO for effective weight optimization to improve routing decisions in UAV networks. By improving packet delivery ratio, lowering latency, increasing throughput, and boosting energy efficiency, this integration advances the area of UAV network routing and closes important research gaps.
| Author | Proposed Methodology | Results | Research Gap |
| Lu et al. (2023) [13] | Review of existing routing protocols and advances in FANETs for SAGINs. | Review highlights the need for robust and efficient routing algorithms. | Lack of focus on integrating deep learning techniques like CNNs or reinforcement learning for optimized routing in FANETs. |
| Zhang and Qiu (2023) [14] | DLGR-2DQ for delay-aware and link-quality-aware geographical routing in UANETs. | Improved packet delivery ratio and reduced end-to-end delay compared to traditional protocols. | Limited exploration of hybrid routing protocols combining DLGR-2DQ with other AI techniques like CNNs. |
| Pandiyaraju et al. (2023) [15] | Multi-objective clustering with CNNs for energy-efficient WSNs in precision agriculture. | Enhanced classification accuracy, throughput, and network lifetime. | Need for investigation into CNN-based approaches for optimizing energy consumption in broader UAV network contexts beyond WSNs. |
| Wang et al. (2022) [16] | GNN-based optimization of UAV locations and relay path selection in 6G UAV-IoT networks. | Scalable solution for UAV relay networks in dynamic environments. | Limited study on the integration of GNNs with other deep learning techniques like reinforcement learning for joint optimization in UAV-IoT networks. |
| Kim et al. (2021) [17] | Optimal routing algorithm for minimizing delivery distances in UAV delivery networks. | Efficient allocation of UAVs to customers while minimizing delivery distances. | Exploration needed on the integration of reinforcement learning with routing algorithms for dynamic and scalable delivery networks. |
| Shnaiwer et al. (2022) [18] | Multi-hop task routing with IRSs and CNNs for UAV-assisted MEC IoT networks. | Improved task offloading and reduced energy consumption with IRSs and CNNs. | Limited exploration of CNN integration with IRSs for optimizing routing decisions and reducing energy consumption in UAV-assisted MEC IoT networks. |
| Ardakani et al. (2021) [19] | Cluster-based named data routing protocol for improving VANET performance. | Improved end-to-end delay, data delivery ratio, and transmitted traffic. | Need for further investigation into the integration of CNNs with VANETs to optimize routing in dense and highly mobile networks. |
| Ding et al. (2022) [20] | MAQMIX for dynamic multi-hop UAV relay networks. | Enhanced network throughput and reduced transmission time compared to baseline. | Exploration required on the use of CNNs and other deep learning techniques for optimizing resource allocation and next-hop selection in dynamic UAV relay networks. |
| Zhu et al. (2021) [21] | Deep reinforcement learning for joint cluster head selection and trajectory planning in UAV-aided IoT networks. | Near-optimal energy consumption and scalability in UAV-aided IoT networks. | Need for investigation into hybrid models integrating CNNs and deep reinforcement learning for real-time decision-making in UAV-aided IoT networks. |
3 Proposed Methodology
3.1 UAV Network Model
The UAV network is modeled as a dynamic, multi-hop wireless network consisting of N UAVs, represented as . Each UAV Ui is equipped with communication capabilities and follows a predefined or random mobility pattern within a 3D space. The position of each UAV at time t is given by . The network topology is dynamic, changing based on the UAVs’ movements.
The communication between UAVs is modeled using an ad hoc network framework, where a direct communication link exists between UAV Ui and UAV Uj if the distance dij(t) at time t is less than or equal to the communication range R:
| (1) |
The network’s connectivity graph where and E(t) represents the set of edges (communication links) at time t, is used to represent the UAV network’s structure.
3.2 Assumptions and Constraints
1. Mobility Model: UAVs follow a Random Waypoint Model (RWM) or a specific predefined mobility model. Each UAV moves with a velocity vi(t) within the range [, ]
| (2) |
2. Communication Range: The communication range R is assumed to be constant for all UAVs. Interference and signal attenuation are not explicitly modeled but are considered implicitly within the range R.
3. Energy Constraints: UAVs have limited battery life. The energy consumption model for a UAV Ui is given by:
| (3) |
Where, is the energy consumed for transmission, for reception, and for mobility.
4. Network Stability: The UAV network is considered quasi-stationary within small time intervals, allowing the optimization algorithm to adjust the CNN weights without significant changes in the topology:
| (4) |
Where, the time interval for optimization, and topology change is is the average time between significant topology changes..
5. Latency and Bandwidth: When assessing the routing protocols, the latency Lij and bandwidth Bij between UAVs Ui and Uj are taken into account:
| (5) |
These assumptions and constraints provide the foundation for modeling the UAV network and serve as the basis for optimizing the CNN weights using the Modified Smell Bees Optimization algorithm to enhance routing protocols.
3.3 Convolutional Neural Networks for Routing
3.3.1 CNN architecture
In order to identify spatial and temporal patterns in UAV mobility data, the Convolutional Neural Network (CNN) architecture used for routing in UAV networks is built with this purpose in mind. The CNN is divided into several layers, which are arranged as follows:
1. Input Layer:
• Input data , where H is the height, W is the width, and C is the number of channels (e.g., number of UAVs or feature maps).
2. Convolutional Layers:
• The first convolutional layer applies K1 filters of size F1F1:
| (6) |
Where denotes the convolution operation, W1 are the filter weights, b1 are the biases, and is the activation function (ReLU).
• Subsequent convolutional layers follow similarly with Ki filters of size FiFi:
| (7) |
3. Pooling Layers:
• Pooling layers reduce the spatial dimensions of the feature maps, typically using max-pooling:
| (8) |
Where, p is the pooling size.
4. Fully Connected Layers:
• The final convolutional layer’s output is flattened and fed into fully connected layers:
| (9) |
Where v is the flattened vector, Wf and bf are the weights and biases, respectively.
5. Output Layer:
• The output layer provides the routing decision probabilities:
| (10) |
Where f2 is the output of the last fully connected layer, and Wo and bo are the weights and biases of the output layer.
3.3.2 Input and Output
• Input Data: The input to the CNN includes UAV mobility patterns represented as sequences of position coordinates pi(t) or environmental images captured by UAVs. Formally, the input tensor X is constructed as:
| (11) |
Where pi(t) represents the position of UAV i at time t.
• Output Data:The CNN produces routing decisions as a probability distribution over potential UAVs to be flown next. Here is the output vector y:
| (12) |
3.3.3 Training Data
• Data Collection: Training data is gathered from real-world or simulated UAV network scenarios, capturing patterns of mobility and the best routes that correspond with them.
• Preprocessing: In order to encode the routing decisions and normalize the UAV positions, the collected data is preprocessed. Routing decisions are encoded as one-hot vectors, and position coordinates are normalized to a fixed range.
| (13) |
• Training: The cross-entropy loss function is used in supervised learning to train the CNN:
| (14) |
Where y is the true routing decision and is the predicted routing decision.
3.4 Modified Smell Bees Optimization Algorithm
3.4.1 Overview of the SBO algorithm
The way bees forage for food serves as the model for the Smell Bees Optimization (SBO) algorithm. It is similar to how bees search their surroundings for food sources and take advantage of them; in this case, it is analogous to searching for the best answers within a search space. The algorithm employs a population of bees, or solutions, to efficiently explore and exploit the search space by conducting both local and global searches.
3.4.2 Benefits of MSBO algorithm
1. Effective Exploration and Exploitation: The algorithm strikes a balance between exploration (to prevent local optima) and exploitation (to efficiently refine solutions) thanks to the mix of global and local search techniques.
2. Better Routing Decisions: MSBO improves CNNs’ capacity to identify patterns in UAV mobility by adjusting CNN weights, which results in more reliable networks and better routing choices.
3. Improved Performance Metrics: Simulation findings show that the technique significantly reduces packet delivery ratio (PDR), end-to-end latency, throughput, and energy usage.
4. Scalability: By preserving variety in the search population, MSBO can effectively adjust to bigger networks and manage the intricacies of dynamic UAV networks.
5. Energy Efficiency: By employing MSBO to optimize CNN weights, computational overhead is decreased, which lowers UAV energy consumption.
6. Quicker Convergence: When compared to conventional optimization methods, the standard SBO’s modifications – such as adaptive step sizes and fitness-based selection – produce faster convergence to optimal solutions.
7. Adaptability: For wider applications, MSBO can be integrated with other algorithms (like reinforcement learning) or modified to optimize other parameters.
3.4.3 Algorithm steps
1. Initialization: Generate an initial population of bees with random solutions.
2. Fitness Evaluation: Evaluate the fitness of each bee based on the objective function.
3. Global Search: A subset of bees (scouts) perform a global search by exploring new areas of the search space.
4. Local Search: The remaining bees (foragers) perform a local search around the best solutions found so far.
5. Update: Replace the worst solutions with new ones from the global and local searches.
6. Iteration: Repeat the fitness evaluation, search, and update steps until convergence or a maximum number of iterations is reached.
3.4.4 Specific modifications made
To tailor the SBO algorithm for CNN weight optimization in UAV networks, the following modifications were implemented:
Initialization of Weights: The initial population of bees is generated with random CNN weights. Each bee represents a set of weights Wi.
| (15) |
Where, L is the number of layers in CNN.
1. Fitness Function: The fitness function is defined based on the performance of the CNN in routing decisions. Specifically, the fitness F(Wi) is evaluated as the accuracy or loss of the CNN on a validation set.
| (16) |
Where, is the loss function, are the true labels, and are the predicted labels.
2. Search Strategies:
• Global Search: Randomly perturb the weights of scout bees to explore new regions in the search space.
| (17) |
Where, is the step size and r is a random vector.
• Local Search: Perform a fine-grained search around the best solutions using Gaussian perturbations.
| (18) |
Where, is the local search step size and N(0,) is a Gaussian distribution with mean 0 and standard deviation .
3. Selection Mechanism: Replace the least fit solutions with new solutions generated from global and local searches to maintain a diverse population and avoid premature convergence.
3.4.5 Parameters used
• Population Size (n): Number of bees in the population.
• Number of Scout Bees (ns): Number of bees performing the global search.
• Number of Forager Bees (nf): Number of bees performing the local search.
• Global Search Step Size (): Step size for global search perturbations.
• Local Search Step Size (): Step size for local search perturbations.
• Gaussian Noise Standard Deviation (): Standard deviation for Gaussian perturbations in local search.
• Maximum Iterations (T): Maximum number of iterations for the optimization process.
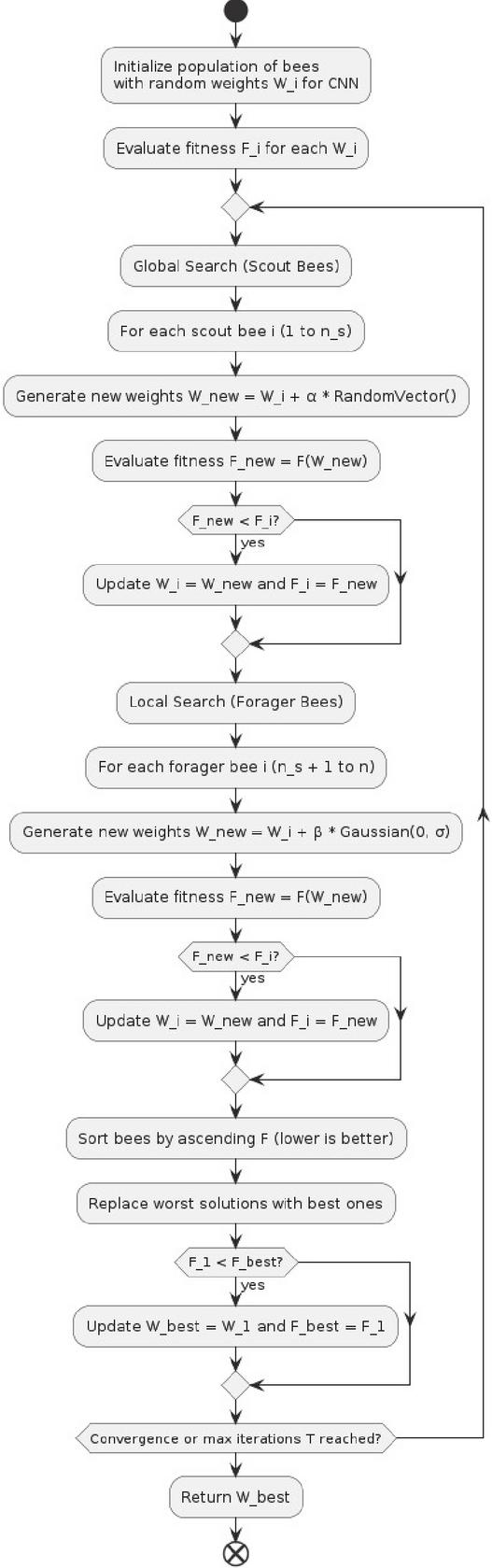
Figure 1 Flowchart of MSBO algorithm for CNN weight optimization.
The procedures for optimizing CNN weights using a bio-inspired method are shown in Figure 1. The first step is to initialize and assess the fitness of a population of bees, each of which represents a set of random CNN weights. The algorithm alternates between local and global search phases: forager bees use Gaussian perturbations scaled by a local step size () to search locally around the best solutions, while scout bees use a random vector scaled by a global step size () to perform a global search. Updates result from fitness evaluations that determine whether new weights are superior. Bees are then sorted by fitness, with the worst solutions replaced by better ones. This process repeats until convergence or a set number of iterations is reached, ultimately returning the best set of weights found.
By comparing the CNN’s outputs to ground truth data, the accuracy calculation using the fitness function assesses how effectively the CNN predicts routing decisions in UAV networks. The error between expected probability (pj) and actual routing labels (yj) is measured by the fitness function, which is frequently based on cross-entropy loss. Better performance is indicated by lower values. The proportion of accurate predictions made by the CNN is then determined by calculating Accuracy (Number of Correct Predictions/Total Predictions) 100. This fitness assessment directs the optimization procedure in the MSBO algorithm, which replaces less ideal solutions (sets of CNN weights) with more fit ones. Over successive iterations, the algorithm minimizes the fitness function, increasing accuracy and ensuring the CNN delivers optimal routing decisions tailored to the dynamic nature of UAV networks.
3.5 Modified Smell Bees Optimization Algorithm
Input:
• n: Population size (number of bees)
• ns: Number of scout bees (global search)
• nf: Number of forager bees (local search)
• : Global search step size
• : Local search step size
• : Standard deviation for local search perturbations
• T: Maximum number of iterations
• F(): Fitness function (e.g., cross-entropy loss of CNN)
• Initialize population of bees with random weights Wi for CNN
Output: Best set of CNN weights Wbest
1. Initialization:
• Initialize population of bees with random solutions (CNN weights):
| (19) |
Here, d is the dimension of the solution space (e.g., number of CNN weights).
2. Global Search (Scout Bees):
• For each scout bee i (1 to ns):
• Generate new weights , where r is a random vector.
• Evaluate fitness F(Wnew).
• If , update weights: .
3. Local Search (Forager Bees):
• For each forager bee i (ns+1 to n):
• Generate new weights , is a Gaussian distribution.
• Evaluate fitness F(Wnew).
• If , update weights: .
4. Selection and Update:
• Sort bees based on fitness, with lower fitness indicating better solutions.
• Replace worst solutions with new solutions generated from global and local searches.
• Update best solution found so far if necessary.
5. Iteration:
a. Repeat global and local search, selection, and update steps until convergence or maximum iterations
b. T reached.
6. Output: Return best set of weights Wbest.
By following these steps, the Modified Smell Bees Optimization Algorithm iteratively refines the CNN weights, aiming to improve the performance of routing decisions in UAV networks.
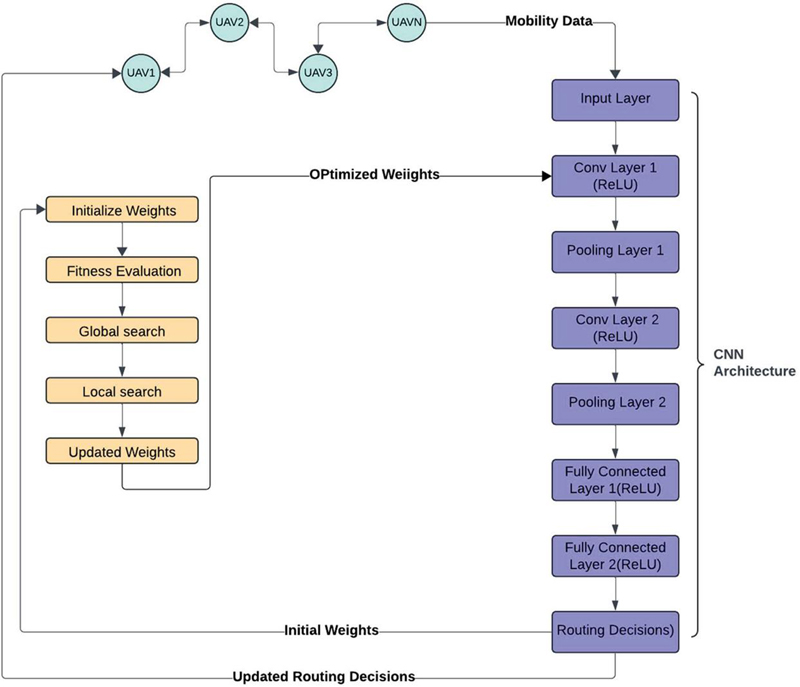
Figure 2 Integrated UAV routing optimization using CNN and modified smell bees algorithm.
3.6 Integration of CNN and Modified SBO
Figure 2 illustrates the integration of a Convolutional Neural Network (CNN) and a Modified Smell Bees Optimization (SBO) algorithm to enhance routing protocols in Unmanned Aerial Vehicle (UAV) networks. UAVs are displayed in the UAV Network Model as a feature of a dynamic, multi-hop wireless network, with communication joins between them being shaped by their respective ranges. The CNN design involves the mobility information from these UAVs as its input. It then processes the information through various layers, including convolutional, pooling, and fully connected layers, to create routing decisions. The Modified SBO algorithm, which iteratively further develops the CNN weights through local and global searches to increment routing efficiency, is utilized to additionally optimize these initial directing decisions. Inside the UAV network, the optimized weights are fed back once again into the CNN to further develop its prediction accuracy of the best routing ways. This ensures lower latency, more successful communication, and trustworthy information transmission. This coordinated methodology utilizes CNNs’ ability for pattern recognition and improvement.
In order to efficiently improve CNN weights for UAV routing, the Modified Smell Bees Optimization (MSBO) method gathers vital information throughout its local and global search stages. By creating disturbed solutions through arbitrary changes in CNN weights, scout bees investigate various areas of the search space throughout the global search. In order to ensure thorough coverage of the search space and to provide insights into possible areas for development, this phase gathers data on the fitness values of these solutions. By concentrating on uncharted territory, the global search eliminates repetition and improves the algorithm’s capacity to find promising answers. Forager bees, however, focus their local search on high-performing candidates found during the global phase. This entails gathering information on the results of fine-grained modifications, such Gaussian perturbations, and using fitness gradients to direct small enhancements. To guarantee accurate optimization, details regarding the neighborhood’s features, such as solution proximity and fitness stability, are also collected. The MSBO method dynamically balances exploration and exploitation by combining data from both search stages. This allows for effective convergence to an ideal set of CNN weights and produces better routing choices for dynamic UAV networks.
3.6.1 Routing decisions using CNN in UAV networks
Issues including dynamic topology, erratic mobility patterns, energy limitations, and the requirement for real-time flexibility, routing decisions are crucial in UAV networks. By using their pattern recognition skills to evaluate UAV mobility data and forecast the best routes, Convolutional Neural Networks (CNNs) provide a sophisticated solution. To find reliable and effective routes, CNNs analyze input data including UAV locations, velocities, and past link performance. This guarantees dependable communication by allowing the network to dynamically modify routing choices in response to variations in UAV placements.
CNNs’ capacity to optimize routing while taking into account several characteristics at once is one of its main benefits. For example, pathways that reduce energy use during data transmission are predicted to meet UAV energy limits. CNNs increase the operating lifespan of the UAV network by prioritizing routes that minimize transmission lengths and prevent excessive energy drain by identifying patterns in movement and network usage. In order to reduce end-to-end latency and maintain quick and effective communication even in situations with high demand, CNNs may also evaluate real-time indicators like traffic load and network quality.
3.6.2 Overcoming UAV-specific challenges with CNNs
UAV networks are mobile and dynamic, they present special issues. By analyzing UAV positional data over time, CNNs are able to identify movement patterns that affect network architecture, overcoming these difficulties. For instance, CNNs use previous data to forecast reliable connections, reducing the frequency of link interruptions brought on by UAV movement. By proactively directing traffic over dependable pathways and avoiding disconnection-prone zones, this predictive capability aids in maintaining a high packet delivery ratio (PDR).
CNNs also help improve the scalability of UAV networks. The network gets more complicated as the number of UAVs rises, increasing the likelihood of congestion and communication lag. By learning from network behavior and adjusting routing for bigger networks without sacrificing performance, CNNs adjust to these circumstances. CNNs provide reliable, energy-efficient, and scalable routing decisions by combining these features with the Modified Smell Bees Optimization (MSBO) algorithm for weight tuning. This meets the particular requirements of UAV networks in practical applications such as environmental monitoring and disaster relief.
4 Results and Discussions
An exhaustive examination of performance measurements between different UAV network directing strategies is displayed in Table 2. With end-to-end delays of 150 ms and 180 ms, throughput measures of 220 kbps and 210 kbps, and energy utilization levels of 300 J and 320 J, respectively, Conventional Ad-hoc On-Demand Distance Vector (AODV) and Dynamic Source Routing (DSR) show PDR of 85.2% and 83.5%. Then again, involving optimization algorithms combined with CNNs brings about huge enhancements. A PDR of 89.7%, an end-to-end delay of 130 ms, a throughput of 250 kbps, and an energy utilization of 280 J are accomplished by the CNN GA approach, while a PDR of 92.5%, an end-to-end delay of 110 ms, a throughput of 270 kbps, and an energy utilization of 260 J are accomplished by the CNN Modified SBO approach. These discoveries feature the adequacy of joining CNNs with optimization techniques to improve directing protocols, which thus brings about upgraded energy effectiveness, diminished latency, higher dependability, and expanded throughput in dynamic UAV networks.
Table 2 Performance metrics comparison
| Packet Delivery | End-to-End | Throughput | Energy | |
| Method | Ratio (PDR) | Delay (ms) | (kbps) | Consumption (J) |
| Traditional AODV | 85.2% | 150 | 220 | 300 |
| Standard DSR | 83.5% | 180 | 210 | 320 |
| CNN Genetic Algorithm | 89.7% | 130 | 250 | 280 |
| CNN Modified SBO | 92.5% | 110 | 270 | 260 |
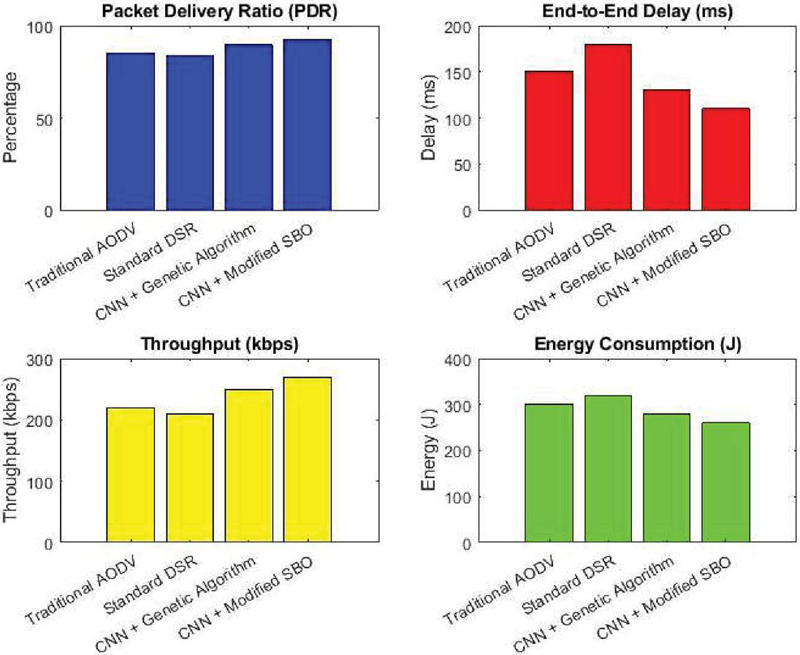
Figure 3 Performance comparison of routing methods in UAV networks.
An examination of four routing systems in light of significant UAV network performance markers is displayed in Figure 3. In the first place, PDR, CNN GA and CNN Modified SBO are the two CNN-based strategies that perform better compared to traditional protocols like AODV and DSR, with CNN Modified SBO having the most noteworthy PDR of 92.5%. In terms End-to-End Delay, CNN-based strategies altogether decrease delays contrasted with traditional protocols, with CNN Modified SBO accomplishing the most minimal delay of 110 ms, trailed by CNN GA at 130 ms. Thirdly, both CNN-upgraded approaches show preferable throughput over conventional methodologies in terms of data transmission rates. Last but not least, in terms of energy consumption, the CNN Modified SBO approach performs the best, using 260 J, a significant amount less than the energy used by the Traditional AODV and Standard DSR. Overall, the findings point to the possibility of greatly improving UAV network communication efficiency, latency reduction, throughput improvement, and energy conservation by combining CNN-based techniques with optimization algorithms such as Modified SBO.
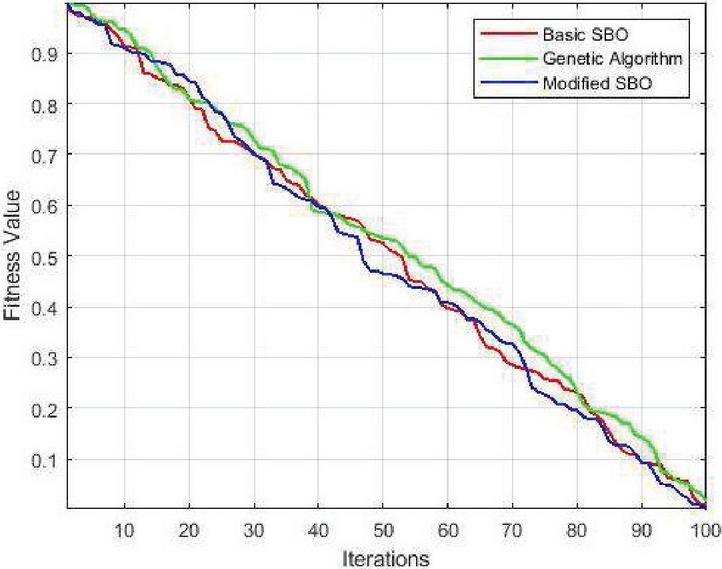
Figure 4 Convergence rate comparison of optimization algorithms.
4.1 Convergence Analysis
The three optimization algorithms – Genetic Algorithm, Modified SBO, and Basic Smell Bees Optimization – and their convergence rates are shown in Figure 4. A line that displays the fitness value (also known as the objective function value) over iterations is used to illustrate how well each algorithm performs. Compared to the other two algorithms, the Basic SBO (highlighted in red) demonstrates a comparatively slower convergence, requiring a greater number of iterations to reach its optimal or nearly optimal solution. The Modified SBO (blue line) demonstrates a significantly faster convergence, achieving optimal or near-optimal solutions in fewer iterations than the Genetic Algorithm (green line), which displays a moderate convergence rate. When contrasted with the standard SBO and GA, this correlation shows how powerful the Modified SBO algorithm is at rapidly convergent to high-quality solutions, demonstrating that it is a promising technique for optimization tasks.
Although the Basic Smell Bees Optimization (SBO) method was inspired by the foraging behavior of bees, it is less successful in complicated, high-dimensional issues like UAV routing due to its slower convergence and restricted capacity to escape local optima. The crossover and mutation methods of the Genetic Algorithm (GA), on the other hand, provide middling performance. They improve exploration but sometimes lack accuracy in fine-tuning solutions, which raises processing costs and occasionally causes premature convergence. However, by integrating adaptive global and local search algorithms, the Modified SBO (MSBO) performs better than both, guaranteeing accurate exploitation and effective exploration. This leads to greater scalability in dynamic UAV networks, faster convergence, and superior routing metrics, including a higher packet delivery ratio (92.5%), lower end-to-end delay (110 ms), and lower energy usage (260 J). Overall, MSBO strikes the best balance between performance and computational efficiency, making it ideal for real-world UAV applications.
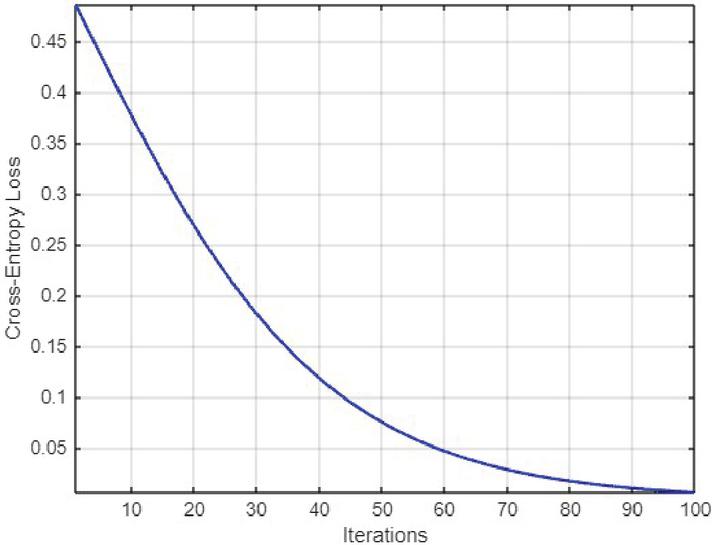
Figure 5 Cross-entropy loss improvement over iterations.
The cross-entropy loss values as they progress through the optimization cycle are displayed in Figure 5. The cross-entropy loss dynamically drops as the quantity of iterations rises, proposing that the model is performing better. This outlines how well the VSBO calculation by iteratively further developing the CNN weights. The convergence towards an optimal or nearly optimal solution is reflected in the decreasing trend. The algorithm is likely improving the accuracy of routing decisions in dynamic UAV networks by reducing prediction errors, as evidenced by the consistent decrease in cross-entropy loss values.
4.2 Energy Efficiency
An analysis of the energy consumption of the various routing techniques – Traditional AODV, Standard DSR, CNN Genetic Algorithm, and CNN Modified SBO – is shown in Table 3. The mean energy used by each method is shown in the “Average Energy Consumption (J)” column. It is clear that when compared to more established routing protocols like AODV and DSR, both CNN-based methods (with Genetic Algorithm and Modified SBO) use less energy. In particular, CNN Modified SBO uses the least amount of energy (260 J), while CNN Genetic Algorithm uses the most energy (280 J). This implies that combining CNNs with optimization algorithms enhances UAV networks’ energy efficiency considerably. Moreover, as visible from the “Network Lifetime (minutes)” segment, which computes how much time until energy resources expire, CNN Modified SBO produces the longest network lifetime – 55 minutes – demonstrating its predominance over different methods in broadening UAV network activity. These discoveries feature that it is so significant to utilize CNN-based procedures alongside changed optimization methods to further develop energy efficiency and increment the time that UAV networks can work.
Table 3 Energy consumption analysis
| Average Energy | Network | |
| Method | Consumption (J) | Lifetime (minutes) |
| Traditional AODV | 300 | 45 |
| Standard DSR | 320 | 40 |
| CNN Genetic Algorithm | 280 | 50 |
| CNN Modified SBO | 260 | 55 |
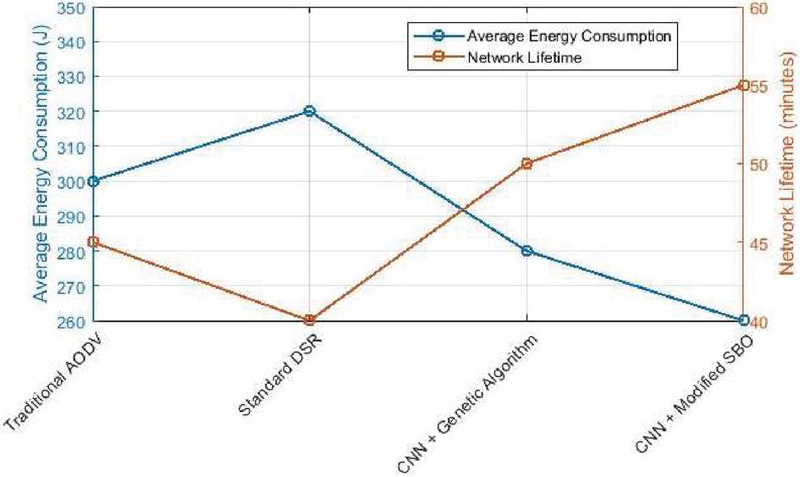
Figure 6 Energy efficiency comparison of routing methods.
The typical energy utilization and network lifetime for the four routing procedures – Traditional AODV, Standard DSR, CNN GA, and CNN Modified SBO – are displayed in Figure 6. In contrast with different strategies, CNN Modified SBO has the least typical energy utilization (260 J), bringing about a 55-minute organization lifetime. In contrast, Standard DSR consumes the highest average energy at 320 J, resulting in a shorter network lifetime of 40 minutes. This comparison highlights the superior energy efficiency of the CNN Modified SBO approach, making it a promising solution for prolonging the lifespan of UAV networks while ensuring reliable data transmission.
4.3 Scalability
A scalability analysis was conducted on a system likely involving unmanned aerial vehicles (UAVs) and a method called “CNN Modified SBO”, where CNN is likely a machine learning algorithm and SBO might be an optimization technique. The Table 4 shows that as the number of UAVs increases from 10 to 50, there is a slight trade-off between efficiency and performance. While the packet delivery ratio decreases a bit (from 92.5% to 88.5%) and the end-to-end delay increases slightly (from 110 ms to 150 ms), the throughput stays fairly constant around 250 kbps.
| Number | Packet Delivery | End-to-End | Throughput | |
| UAVs | Method | Ratio (PDR) | (ms) | (kbps) |
| 10 | CNN Modified SBO | 92.5% | 110 | 270 |
| 20 | CNN Modified SBO | 91.2% | 120 | 260 |
| 30 | CNN Modified SBO | 90.8% | 130 | 255 |
| 40 | CNN Modified SBO | 89.7% | 140 | 250 |
| 50 | CNN Modified SBO | 88.5% | 150 | 245 |
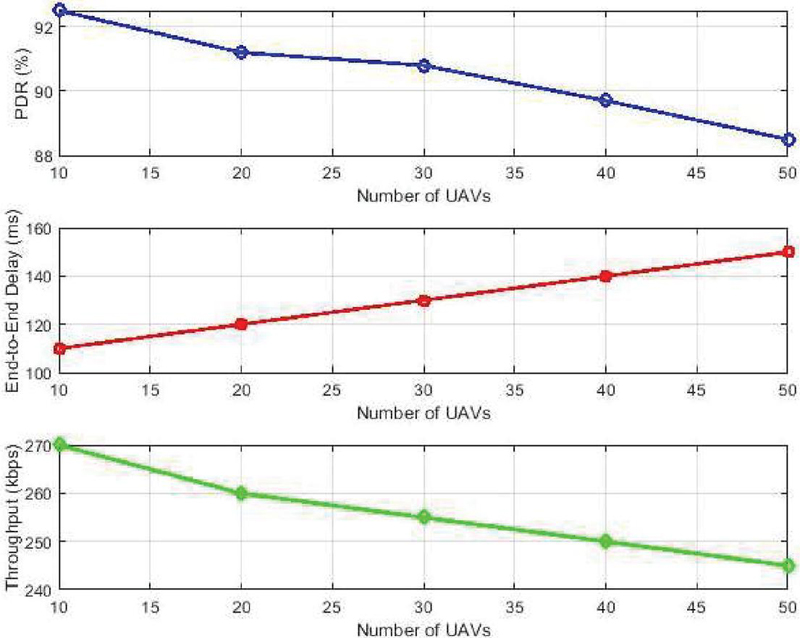
Figure 7 Scalability performance analysis of UAV networks: PDR, End-to-End Delay, and throughput trends.
The subplots in Figure 7 reveal the performance of the UAV network as the number of UAVs increases from 10 to 50. The first subplot shows a gradual decline in the Packet Delivery Ratio (PDR) from 92.5% to 88.5%, indicating a slight decrease in network reliability with more UAVs. The second subplot shows a reliable ascent in End-to-End Delay from 110 ms to 150 ms, demonstrating that as the quantity of UAVs builds, the network encounters expanded latency. The third subplot shows a consistent decrease in throughput, from 270 kbps to 245 kbps, recommending that the network’s ability to transmit data is diminished with the expansion of more UAVs. The graphs show despite the fact that adding more UAVs to the organization can strain it, the framework actually keeps a reasonable throughput and generally high PDR.
The Modified Smell Bees Optimization (MSBO) algorithm relies on carefully defined parameters to balance its global and local search processes, ensuring precise optimization of CNN weights for UAV routing. In the global search phase, the population size (n) typically ranges from 30 to 100, with around 20–30% designated as scout bees (n) for exploration, using a step size () between 0.1 and 0.5 to introduce significant diversity in candidate solutions. For local search, the remaining bees (n) perform refined adjustments with a smaller step size () of 0.01 to 0.1 and Gaussian noise standard deviation () of 0.05 to 0.2, allowing precise fine-tuning around promising solutions. The algorithm halts based on a maximum iteration limit (T), typically set between 100 and 500, or when fitness improvement falls below a threshold (), usually between 10 and 10. The fitness function evaluates CNN weights using routing metrics like Packet Delivery Ratio (target: 90–95%), End-to-End Delay (below 120 ms), Throughput (above 250 kbps), and Energy Consumption (below 270 J). By dynamically adjusting the exploration-to-exploitation ratio initially set at 70:30 but shifting to 40:60 as convergence nears the MSBO algorithm effectively balances global exploration and local exploitation, ensuring robust optimization of routing decisions in dynamic UAV networks.
5 Conclusion and Future Work
This work explores how to combine Convolutional Neural Networks (CNNs) with optimization algorithms – specifically, the Modified Smell Bees Optimization (SBO) algorithm – to improve routing protocols in Unmanned Aerial Vehicle (UAV) networks. Our approach greatly outperforms conventional routing techniques like AODV and DSR by utilizing CNNs’ capacity for pattern recognition and SBO’s expertise in optimization. Our findings show that the CNN Modified SBO approach achieves better performance metrics, such as a low end-to-end delay of 110 ms, a high packet delivery ratio of 92.5%, increased throughput of 270 kbps, and energy efficiency of 260 J. These results highlight how well our method works in dynamic UAV networks to improve communication efficiency, lower latency, and save energy. Furthermore, as the number of UAVs rises, the CNN Modified SBO approach continues to operate with strong performance, according to the scalability analysis. All things considered, this work advances the field by putting forth a novel framework for routing decision optimization in UAV networks that integrates bio-inspired optimization and deep learning. This opens the door to more dependable and effective UAV operations in a range of applications. Future studies might investigate how to integrate Graph Neural Networks (GNNs) to improve topological optimization in large-scale UAV networks, and how the Modified Smell Bees Optimization (MSBO) algorithm’s dynamic parameter adjustment could increase flexibility in real time. Furthermore, cooperative task allocation and network-wide energy balancing are two potential areas of research for energy-aware multi-UAV coordination systems. While incorporating cutting-edge wireless technology like 6G and intelligent reflecting surfaces (IRSs) might address high-density UAV network difficulties, researching hybrid mobility models that incorporate predetermined and random patterns can better emulate real-world circumstances. To further increase the usefulness of this study, it is imperative to scale it to large UAV swarms with hundreds or thousands of nodes and modify the methodology to guarantee security and privacy in routing decisions.
References
[1] Zhang, M., Cheng, H., Yang, P., Dong, C., Zhao, H., Wu, Q., and Quek, T. Q. (2023). Adaptive Routing Design for Flying Ad Hoc Networks: A Joint Prediction Approach. IEEE Transactions on Vehicular Technology.
[2] Ghasemi Darehnaei, Z., Rastegar Fatemi, S. M. J., Mirhassani, S. M., and Fouladian, M. (2023). Ensemble deep learning using faster r-cnn and genetic algorithm for vehicle detection in uav images. IETE Journal of Research, 69(8), 5102–5111.
[3] Chen, Y. N., Lyu, N. Q., Song, G. H., Yang, B. W., and Jiang, X. H. (2020). A traffic-aware Q-network enhanced routing protocol based on GPSR for unmanned aerial vehicle ad-hoc networks. Frontiers of Information Technology & Electronic Engineering, 21(9), 1308–1320.
[4] Li, J., Li, S., and Xue, C. (2023). Resource Optimization for Multi-Unmanned Aerial Vehicle Formation Communication Based on an Improved Deep Q-Network. Sensors, 23(5), 2667.
[5] Zhang, G. (2023). 6G enabled UAV traffic management models using deep learning algorithms. Wireless Networks, 1–11.
[6] Saritha, K., and Sarasvathi, V. (2024). An Energy-Efficient and QoS-Preserving Hybrid Cross-Layer Protocol Design for Deep Learning-Based Air Quality Monitoring and Prediction. SN Computer Science, 5(3), 307.
[7] Li, J., Dang, X., and Li, S. (2023, November). DQN-Based Routing Resources Optimization in UAV Swarm Communication System. In 2023 International Conference on Wireless Communications and Signal Processing (WCSP) (pp. 426–431). IEEE.
[8] Toorchi, N., Lyu, W., He, L., Zhao, J., Rasheed, I., and Hu, F. (2024). Deep reinforcement learning enhanced skeleton based pipe routing for high-throughput transmission in flying ad-hoc networks. Computer Networks, 244, 110330.
[9] Da Silva, L. M., Ferrão, I. G., Dezan, C., Espes, D., and Branco, K. R. (2023, June). Anomaly-based intrusion detection system for in-flight and network security in uav swarm. In 2023 International Conference on Unmanned Aircraft Systems (ICUAS) (pp. 812–819). IEEE.
[10] Xu, J. (2023). Efficient trajectory optimization and resource allocation in UAV 5G networks using dueling-Deep-Q-Networks. Wireless Networks, 1–11.
[11] Sangeetha Francelin, V. F., Daniel, J., and Velliangiri, S. (2022). Intelligent agent and optimization-based deep residual network to secure communication in UAV network. International Journal of Intelligent Systems, 37(9), 5508–5529.
[12] Francis, S. F. V., Gopi, P., Sarveshwaran, V., and Ponnupillai, A. (2022). An Intelligent System Using Deep Learning-Based Link Quality Prediction and Optimization Enabled Secure Communication in UAV Network. Cybernetics and Systems, 1–28.
[13] Lu, Y., Wen, W., Igorevich, K. K., Ren, P., Zhang, H., Duan, Y., … and Zhang, P. (2023). UAV Ad Hoc Network Routing Algorithms in Space–Air–Ground Integrated Networks: Challenges and Directions. Drones, 7(7), 448.
[14] Zhang, Y., and Qiu, H. (2023). Delay-aware and link-quality-aware geographical routing protocol for UANET via dueling deep Q-network. Sensors, 23(6), 3024.
[15] Pandiyaraju, V., Ganapathy, S., Mohith, N., and Kannan, A. (2023). An optimal energy utilization model for precision agriculture in WSNs using multi-objective clustering and deep learning. Journal of King Saud University-Computer and Information Sciences, 35(10), 101803.
[16] Wang, X., Fu, L., Cheng, N., Sun, R., Luan, T., Quan, W., and Aldubaikhy, K. (2022). Joint flying relay location and routing optimization for 6g uav–iot networks: A graph neural network-based approach. Remote Sensing, 14(17), 4377.
[17] Kim, S., Kwak, J. H., Oh, B., Lee, D. H., and Lee, D. (2021). An optimal routing algorithm for unmanned aerial vehicles. Sensors, 21(4), 1219.
[18] Shnaiwer, Y. N., Kouzayha, N., Masood, M., Kaneko, M., and Al-Naffouri, T. Y. (2022). Multihop task routing in UAV-assisted mobile-edge computing IoT networks with intelligent reflective surfaces. IEEE Internet of Things Journal, 10(8), 7174–7188.
[19] Ardakani, S. P., Kwong, C. F., Kar, P., Liu, Q., and Li, L. (2021). CNN: A cluster-based named data routing for vehicular networks. IEEE Access, 9, 159036–159047.
[20] Ding, R., Chen, J., Wu, W., Liu, J., Gao, F., and Shen, X. (2022). Packet routing in dynamic multi-hop UAV relay network: A multi-agent learning approach. IEEE Transactions on Vehicular Technology, 71(9), 10059–10072.
[21] Zhu, B., Bedeer, E., Nguyen, H. H., Barton, R., and Henry, J. (2021). Joint cluster head selection and trajectory planning in UAV-aided IoT networks by reinforcement learning with sequential model. IEEE Internet of Things Journal, 9(14), 12071–12084.
[22] Chen, Y., and Liu, W. (2021). MAC layer energy consumption and routing protocol optimization algorithm for mobile ad hoc networks. Complexity, 2021, 1–12.
[23] Gupta, S., Singhal, N., Hundekari, S., Upreti, K., Gautam, A., Kumar, P., and Verma, R. (2024). Aspect Based Feature Extraction in Sentiment Analysis using Bi-GRU-LSTM Model. Journal of Mobile Multimedia, 20(04), 935–960. https://doi.org/10.13052/jmm1550-4646.2048.
[24] Khan, M. R., Upreti, K., Alam, M. I., Khan, H., Siddiqui, S. T., Haque, M., and Parashar, J. (2023). Analysis of Elliptic Curve Cryptography & RSA. Journal of ICT Standardization, 11(04), 355–378. https://doi.org/10.13052/jicts2245-800X.1142.
[25] K. Upreti, S. Arora, A. K. Sharma, A. K. Pandey, K. K. Sharma and M. Dayal, Wave Height Forecasting Over Ocean of Things Based on Machine Learning Techniques: An Application for Ocean Renewable Energy Generation, in IEEE Journal of Oceanic Engineering, vol. 49, no. 2, pp. 430–445, April 2024, doi: 10.1109/JOE.2023.3314090.
Biographies

Sachin Kumar Gupta is currently working as an Associate Professor in the Department of Electronics and Communication Engineering (under the mentorship of IIST–ISRO), Central University of Jammu, Jammu (UT of J&K), India since 8th September 2023, He has received his B. Tech in Electronics and Telecommunication Engineering from NIT Raipur, India in 2008 and M. Tech & Ph.D. with Specialization in Systems Engineering from IIT (BHU), Varanasi, India in 2011 & 2016, respectively. He was a former research fellow in the Mobile Computing and Broadband Networking Lab, Department of Computer Science, NCTU, Taiwan. He has also served as Assistant Professor in the SoECE, SMVDU, Katra, (J&K), India from 1st January 2015 to 7th September 2023. He has published 120+ research articles in reputed international/national journals and prestigious conference proceedings, and an author of many book chapters as well. He has also edited a number of books in prestigious publication houses. He has organized several FDP, STC, workshops, conferences, etc. as coordinator and organizing secretary. He is an associate editor and reviewer in various reputed journals and conferences. He is member of IEEE, and life member of IETE, ISTE, CSI, ISOC, etc.

Suhail Mohi Ul Din currently serves as a Project Associate at the Indian Institute of Technology (IIT) Bhilai, contributing to a COMET Foundation-funded project titled “Smart Radio Environments, Implementation and Deployment for Targeted Use-Cases.” Previously, he worked as a Junior Research Fellow at the National Institute of Technology (NIT) Jalandhar, where he played a key role in capacity-building projects for Unmanned Aircraft Systems (UAS), funded by MeitY.
Suhail Mohi Ul Din holds a Master of Technology (M.Tech) in Electronics and Communication Engineering from Shri Mata Vaishno Devi University, a Master of Arts (M.A.) in Public Administration from IGNOU, and a Bachelor of Technology (B.Tech) in Electronics and Communication Engineering from the Islamic University of Science and Technology Awantipora.
He has extensive experience in UAV technology, wireless sensor networks, and ad-hoc networks, and has organized and coordinated numerous workshops and bootcamps on drone technologies across India. His research focuses on collaborative multi-UAV systems, energy transmission in wireless sensor networks, and advanced communication systems. With several peer-reviewed publications and conference presentations, Suhail Mohi Ul Din demonstrates a deep commitment to advancing sustainable and innovative solutions in communication and automation. He is proficient in MATLAB, Python, C++, and other engineering tools.

Kamal Upreti is currently working as an Associate Professor in Department of Computer Science, CHRIST (Deemed to be University), Delhi NCR, Ghaziabad, India. He completed is B. Tech (Hons) Degree from UPTU, M. Tech (Gold Medalist), PGDM(Executive) from IMT Ghaziabad and PhD in Department of Computer Science & Engineering. He has completed Postdoc from National Taipei University of Business, TAIWAN funded by MHRD.
He has published 87+ Patents, 32+ Magazine issues and 111+ Research papers in in various reputed Journals and international Conferences. His areas of Interest such as Modern Physics, Data Analytics, Cyber Security, Machine Learning, Health Care, Embedded System and Cloud Computing. He has published more than 45+ authored and edited books under CRC Press, IGI Global, Oxford Press and Arihant Publication. He is having enriched years’ experience in corporate and teaching experience in Engineering Colleges.
He worked with HCL, NECHCL, Hindustan Times, Dehradun Institute of Technology and Delhi Institute of Advanced Studies, with more than 15+ years of enrich experience in research, Academics and Corporate. He also worked in NECHCL in Japan having project – “Hydrastore” funded by joint collaboration between HCL and NECHCL Company. He has completed project work with Joint collaboration with GB PANT & AIIMS Delhi, under funded project of ICMR Scheme on Cardiovascular diseases prediction strokes using Machine Learning Techniques from year 2017–2020 of having fund of 80 Lakhs. He got 3 Lakhs fund from DST SERB for conducting International Conference, ICSCPS-2024, 13–14 Sept 2024. Recently, he got 10 Lakhs fund from AICTE – Inter-Institutional Biomedical Innovations and Entrepreneurship Program (AICTE-IBIP) for 2024–2026. He has attended as a Session Chair Person in National, International conference and key note speaker in various platforms such as Skill based training, Corporate Trainer, Guest faculty and faculty development Programme. He awarded as best teacher, best researcher, extra academic performer and Gold Medalist in M. Tech programme.

Shubham Mahajan, a distinguished member of prestigious organizations such as IEEE, ACM, and IAENG, boasts an impressive academic and professional background. He earned his B.Tech. degree from Baba Ghulam Shah Badshah University, his M.Tech. degree from Chandigarh University, his Ph.D. degree from Shri Mata Vaishno Devi University (SMVDU) in Katra, India. Currently, he serves as an Assistant Professor at Amity University, Haryana.
Dr. Mahajan has a remarkable track record in the field of artificial intelligence and image processing, holding an impressive portfolio of seventeen Indian patents, as well as one Australian and one German patent. His contributions to the field are further evidenced by his extensive publication record, which includes over 84 articles published in peer-reviewed journals and conferences and 8 edited books. His research interests span a wide array of topics, encompassing image processing, video compression, image segmentation, fuzzy entropy, nature-inspired computing methods, optimization, data mining, machine learning, robotics, and optical communication. Notably, his dedication and expertise have earned him the ‘Best Research Paper Award’ from ICRIC 2019, published by Springer in the LNEE series.

Saroj S. Date is an accomplished academician and researcher with over 18+ years of teaching experience in Computer Science & Engineering. Currently she is working as an Associate Professor in the Department of Artificial Intelligence and Data Science at CSMSS Chh. Shahu College of Engineering, Chh. Sambhajinagar. She has an extensive background in Computer Engineering, holding a Ph.D. from Dr. Babasaheb Ambedkar Marathwada University, Chh. Sambhajinagar. She pursued Bachelor of Engg. from SGGS College of Engg. & Tech, Swami Ramanand Teerth Marathwada University, Nanded and Master of Engg. from Dr. Babasaheb Ambedkar Marathwada University, Chh. Sambhajinagar.
Her expertise spans diverse subjects, including Machine Learning, Theory of Computation, Compiler Design, and Big Data Analytics. Dr. Date is proficient in programming languages such as Python, Java, C++. She has contributed significantly to research with publications on sentiment analysis, natural language processing, and machine learning, including Scopus-indexed journal articles, International journals/conferences and book chapters.
Her main research work focuses on Sentiment Analysis, Natural Language Processing, Data Mining, Text Mining, Artificial Intelligence, Mobile Computing, Big Data Analytics, etc.
Journal of Mobile Multimedia, Vol. 20_5, 1117–1152.
doi: 10.13052/jmm1550-4646.2056
© 2024 River Publishers