Obstacle-Aware Path Planning in Multi-Robot Systems Using Adaptive Spider Wasp Optimization
Sakthitharan Subramanian1, B. Renuka Devi2, F. Sangeetha Francelin Vinnarasi3 and Velliangiri Sarveshwaran4,*
1Department of Computational Intelligence, SRM Institute of Science and Technology, Kattankulathur Campus, Chennai, India
2Department of Information Technology, Sri Sairam Engineering College, Chennai, Tamil Nadu, India
3Professor, Department of Information Technology, St. Joseph’s Institute of Technology, OMR, Chennai – 600119, Tamil Nadu, India
4Department of Computational Intelligence, SRM Institute of Science and Technology, Kattankulathur Campus, Chennai, India
Department of Computer and Information Engineering, National Chung Cheng University, Minxiong, Chiyai, Taiwan
E-mail: sakthits@srmist.edu.in; renukadevi.it@sairam.edu.in; fsangeetha@gmail.com; vellingiri@ccu.edu.tw
*Corresponding Author
Received 01 March 2025; Accepted 11 August 2025
Abstract
Path planning generates a shorter path from source to destination based on sensor information acquired from an environment. An obstacle avoidance is an important task in robotics within path planning since the automatic functioning of robots requires reaching the destination without collisions. Moreover, obstacle avoidance algorithms have an important part in robotics. The existing algorithms did not enable robots to navigate their environments effectively, lessening the threat of collisions and preventing obstacles. Here, an Adaptive Spider Wasp Optimizer (ASWO) is introduced for path planning in mobile multi-robots. Initially, the simulation of an environment utilizing multiple robots and targets along with obstacles is accomplished. Thereafter, multi-objectives namely path smoothness, obstacle avoidance, and path length are considered. Lastly, path planning is conducted employing ASWO by considering fitness parameters such as path smoothness, obstacle avoidance, and path length. However, ASWO is designed by integrating adaptive concept with Spider Wasp Optimizer (SWO). In addition, ASWO achieved maximal value of fitness and path smoothness about 1.795 and 91.121% as well as minimal value of path length about 897.883 km.
Keywords: Path planning, mobile multi-robots, obstacle avoidance (AD), adaptive concept (AC), spider wasp optimizer (SWO).
1 Introduction
The mobile robots have an advantage of being easier to activate and it can be adaptably managed as well as transmitted. Moreover, these robots replace the manpower for reducing handling costs of material while decreasing the possibility of accidental threats. Also, the mobile robot has the benefits of reliable operation and easier maintenance [1]. In the practical applications of mobile robots, an ability to work safely, stably and effectively is an important factor for enhancing effectiveness of complete production model. The two vital key technologies are obstacle avoidance model and path planning model. The path planning includes an identification of feasible paths for mobile robots to move towards starting location to targeted location in specific environment by considering parameters namely path smoothness, path distance and time [2, 8, 9]. As an outcome, mobile robots are predicted to reach their targeted location within short duration [2]. Path planning is classified into two types such as global path planning and local path planning. In the global path planning, an automatic robot needs information regarding environment, initial and target locations as well as obstacle locations. On the contrary, such data are not recognized in the local path planning [2].
An autonomous obstacle avoidance is that while the robots moving along planned route and identifies an occurrence of dynamic or static obstacles on a path by sensors, it requires to initiate the related obstacle avoidance approach. Hence, an essential factor influencing the obstacle avoidance and path planning capability of robots is its corresponding approach and thus, it is highly significant to devise an effectual obstacle avoidance and path planning algorithm for avoiding collisions and improving operation speed of robots [1]. Nowadays, metaheuristic algorithms have been gained admiration to resolve Obstacle Avoidance Path Planning (OAPP) owing to their easiness and efficacy in identifying solutions. The most commonly employed algorithms are classified into four types namely population-based algorithm, evolution-based algorithm, physical/chemical-based algorithm and human-inspired algorithm. The population-enabled algorithms include whale optimization algorithm (WOA) [4, 10], salp swarm algorithm (SSA), Aquila Optimizer (AO), Harris Hawks (HHO) [4, 12], and Grey Wolf Optimizer (GWO). Evolution-enabled algorithms include the genetic algorithm (GA), differential evolution (DE) [4, 13] and evolution strategies (ESs) [4, 11]. Human-inspired algorithms mostly include teaching–learning-based optimization (TLBO), socio evolution and learning optimization (SELO) and search and rescue optimization (SAR) [4, 14]. Physical and chemical-based algorithms include big bang–big crunch algorithm (BB-BC), multi-verse optimizer (MVO) [4, 15] and water evaporation optimization (WEO) [4].
Motivation
Path planning is a crucial task in robotics that involves generating the shortest and most efficient path from a source to a destination using sensor data while avoiding obstacles. Obstacle avoidance plays a key role in ensuring safe and autonomous navigation without collisions. Although various metaheuristic algorithms have been applied to robotic path planning, they often suffer from limitations like premature convergence, poor adaptability in dynamic environments, and weak performance in balancing path smoothness with obstacle avoidance. These shortcomings reduce the reliability and efficiency of robot navigation, especially in complex multi-robot scenarios. To address these challenges, this paper proposes an Adaptive Spider Wasp Optimizer (ASWO) for effective path planning in mobile multi-robot systems. ASWO integrates an adaptive mechanism into the original Spider Wasp Optimizer (SWO) to enhance its exploration–exploitation balance and responsiveness to environmental changes. The method considers key objectives, such as path smoothness, obstacle avoidance, and path length. Simulation results in environments with multiple targets and obstacles demonstrate that ASWO outperforms traditional methods by achieving higher fitness values and improved path quality. This shows the necessity of ASWO in scenarios where existing algorithms fall short in optimizing multiple objectives simultaneously.
An essential contribution is described by,
• Proposed ASWO for path planning in mobile multi-robots: Path planning refers to an important technology in the obstacle avoidance and plays a significant part in system performance. Here, path planning is done utilizing ASWO by considering fitness parameters such as path smoothness, obstacle avoidance and path length. However, ASWO is presented by incorporating adaptive concept with SWO.
The layout of below sections is: Section 2 mentions literature overview of conventional methods and their shortcomings, Section 3 interprets methodology of ASWO, Section 4 reveals the outcomes of ASWO and Section 5 illustrates conclusion of ASWO.
2 Literature Survey
Zhang, T., et al. [1] developed improved particle swarm optimization (IPSO) for path planning in for multiple robots. It improved the exploration ability of robot configuration, but still, it did not sufficiently address the communications amongst robots. Muhammad, A., et al. [2] presented Generalized Laser Simulator (GLS) to navigate mobile robots autonomously in an occurrence of static and dynamic obstacles. It generated an optimum path, even though this method failed to identify paths for individual probable point combination. Wang, Q., et al. [3] designed Ant Colony Optimization-Dynamic Window Approach (ACO–DWA) for multiple mobile robot’s path planning and obstacle avoidance. This technique could understand a cooperative obstacle avoidance in indefinite environment with global optimality and high safety. However, it failed to include evaluation measures namely ocean currents and energy consumption for coordinating multi-agent systems. Gao, Y., et al. [4] introduced an enhanced OAPP approach termed LMBSWO for mobile robots. This model had effective resolving performance together with higher robustness. Nevertheless, it did not consider definite map environments for enhancing the performance of mobile robots. Poojith U. Rao, et al. [16] proposed a Quantum Alternating Operator Ansatz (QAOA) approach for path planning in multi-robot systems. While the model achieved significant improvement in runtime, it was evaluated using only a limited set of metrics. Lin Chen et al. [17] introduced a Transformer-based Imitative Reinforcement Learning (TIRL) approach for multi-robot path planning by integrating a transformer structure into policy neural networks. This model combined a double deep Q-network with contrastive learning to address training challenges in policy networks. The key advantages of this method were achieving the lowest average steps and highest success rates. However, its planning performance reduced when handling a large number of robots [18, 19].
2.1 Challenges
Some of the challenges experienced by classical algorithms are interpreted below.
• The algorithm introduced in [2] was not utilized for boosting up the path planning process by perfectly training the path.
• In [3], high-density obstacles as well as unknown static obstacles were only focused, and it did not consider more complicated factors such as dynamic obstacles, non-flat terrain and so on.
• The usage of robots is increasing everyday as it is able to perform complicated and risky tasks faster and better than humans. For identifying the shorter and obstacle-free path for robots in minimal time becomes highly significant. Hence, an effective path planning and obstacle avoidance model is essential.
3 Problem Statement
Initially, problem of the path planning examined can be defined as follows: Consider, the cluttered environment with starting location and targeted location. The purpose of path planning is to identify a collision-free optimum path with series of points that are feasible and safer to follow by the mobile robots. Figure 1 exposes the system model of path planning in mobile multi-robots. The working space refers to physical space, which is a subset of for planar or for spaces. The obstacles specify to a part of that are occupied, indicated as . The configuration space of obstacles is a mapping of obstacles in working space to configuration space. The free configuration space is a group of configurations, wherein robot is collision-free with obstacles as stated below.
| (1) |
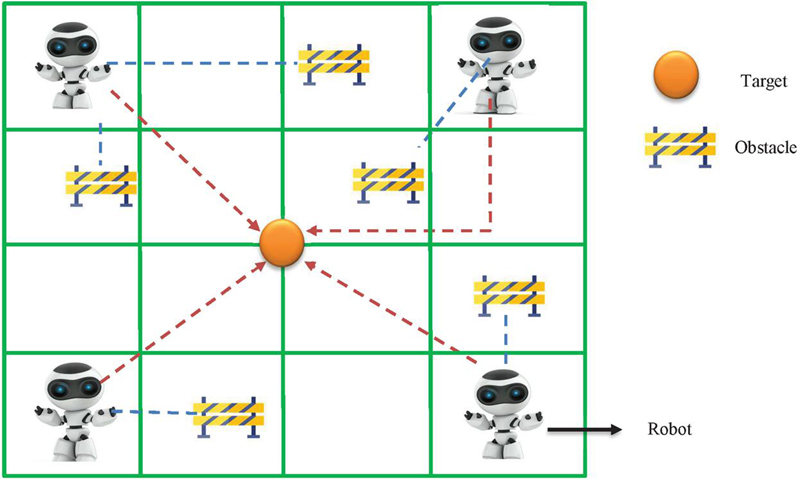
Figure 1 System model of path planning in mobile multi-robots.
4 Proposed Adaptive Spider Wasp Optimizer for Path Planning in Mobile Multi-robots
Determination of path planning for the mobile robots has gained more attention over past few decades, with an intention to identify effectual and safe paths amongst initial and final paths. Here, ASWO is presented for path planning in mobile multi-robots. Firstly, simulation of an environment utilizing multiple robots and targets along with obstacles is done. After that, multi-objectives like path smoothness, obstacle avoidance and path length are considered for path planning. At last, path planning is accomplished by ASWO that is derived by merging adaptive concept with SWO. Figure 2 demonstrates a visual presentation of ASWO for path planning in mobile multi-robots.
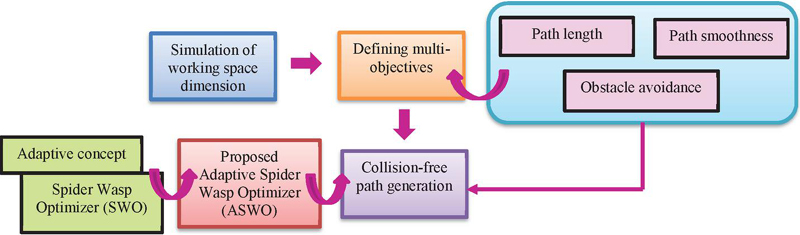
Figure 2 Visual presentation of ASWO for path planning in mobile multi-robots.
4.1 Multi-objectives for Path Planning
Path planning in mobile multi-robots is the dynamic and complicated domain with several strategies and models. Here, path planning is accomplished based on multi-objectives such as path smoothness, obstacle avoidance and path length.
4.1.1 Path length
An individual robot should generate the consequent location in a trajectory path and thus, it refers to minimal path from existing position to targeted position. As an outcome, path length [7] is minimized. An objective measure derived for calculating a distance from present position to target can be expressed as,
| (2) |
where, indicates present velocity of robot at time , and depicts initial location and targeted location, represents next location while the robot decides to move in a time whereas denotes parameter of path length.
4.1.2 Path smoothness
A path smoothness [6] is computed by adding the turning angle of robots in desirable path. The trajectory smoothness is a highly essential feature in path planning of robots as the robots should not considerably vary its directions. The path smoothness factor can be modeled by,
| (3) |
Here, mentions angle amongst two vectors and whereas implies path smoothness.
4.1.3 Obstacle avoidance
The obstacles consisting in an environment should be prevented while a robot is moving towards specific target. The obstacles can be static or dynamic in nature and an expression of obstacle avoidance is given as,
| (4) |
Here, and implies static and dynamic nature of obstacles whereas depicts obstacle avoidance.
4.2 Path Planning Using ASWO
Path planning in multi-robots is an important domain of research as well as applications in the robotics, especially for tasks such as surveillance, rescue and exploration. An intention is to manage numerous robots for navigation through the environment effectively while preventing collisions, optimizing routes and attaining certain task objectives. Here, path planning is accomplished by ASWO, which is modelled by combining adaptive concept with SWO.
4.2.1 Solution encoding
The solution encoding is defined as a process to identify best path from starting location to targeted location for multi-robots to reach. From ‘’ probable solutions, choose ‘’ optimum paths utilizing ASWO. Figure 3 presents the solution encoding for path planning.
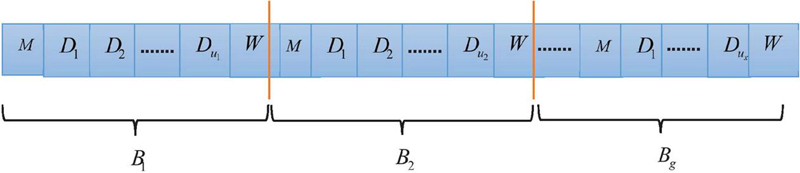
Figure 3 Solution encoding for path planning.
4.2.2 Fitness function
Fitness function is the quantitative measure utilized for evaluating a specific path or group of paths satisfies definite constraints and objectives. Here, the fitness measure should be maximum and it is computed as,
| (5) |
Here, specifies normalizing factor whereas and illustrates path length, path smoothness and obstacle avoidance. is defined as the sum of the maximum possible values of the individual components, such as path length, path smoothness, and obstacle avoidance. This ensures that the computed fitness value remains within a consistent range and facilitates fair comparison across different scenarios.
4.2.3 Algorithmic steps of ASWO
SWO [5] is the naturally inspired algorithm, which imitates the nesting, mating and hunting characteristics of female spider wasps. This algorithm efficiently balances exploitation and exploration and thus, leads to highly effectual convergence against optimum solutions. Here, adaptive concept is combined with SWO termed as ASWO is designed for path planning in multi-robots. ASWO acts as an efficient, robust and flexible algorithm for path planning in mobile multi-robot systems. The algorithmic steps of ASWO are discussed as follows.
Step 1: Initialization of solution Initially, all spider wasps are considered as the solution in a current group and it is given as,
| (6) |
Here, indicates th candidate solution and mentions overall variables in population .
Step 2: Computation of objective function The objective measure is evaluated based on path smoothness, obstacle avoidance and path length using Equation (5).
Step 3: Exploration phase During this phase, spider wasp hunts a search zone randomly for obtaining prey, which can be modeled as,
| (7) |
Here, implies updated position of all female wasps with constant movement across current direction, signifies index of current generation whereas mentions population index. Moreover, and illustrates dual arbitrary solutions, which are utilized for classifying exploration way whereas and specifies their indices. An update expression of ASWO is interpreted by,
| (8) |
Here, is made adaptive and it can be specified as,
| (9) |
Here, implies constant parameter, indicates maximum generation, signifies distance control parameter, mentions binary vector whereas reveals present generation, depicts lower bound and represents upper bound. The adaptive formulation is designed based on a linear decay mechanism, where the value of the term decreases as the number of generations increases. This helps the algorithm shift gradually from global exploration in the early stages to local exploitation in the later stages. This type of adaptive design is commonly used in evolutionary and swarm-based algorithms to improve convergence. Furthermore, can be evaluated as,
| (10) |
Here, illustrates randomly generated number amongst 1 and 2.
Step 4: Exploration and exploitation phase Thereafter identifying a prey, spider wasps try to identify and abolish it. Normally, two scenarios are available. In an initial scenario, spider wasp follows the target to catch and put on their nests whereas in next scenario, wasps are not able to get the released target. Both scenarios can be estimated as mentioned below.
| (11) |
Here, depicts index of existing generation, indicates population index, signifies random solution, wherein mention its index, implies vector of values formed randomly within 0 and 1. During next scenario, a distance amongst prey as well as spider wasp are increased slowly that can be manifested as,
| (12) |
where, refers to the vector
Step 5: Exploitation phase The below expression includes dragging of spider nearer an area and optimal location for building nests.
| (13) |
Here, represents optimal solution.
Step 6: Mating characteristics Spider wasp has an ability for identifying gender, which is foreseeable by host size in which egg is located. In this stage, every spider wasp defines the possible solution and below mentioned equation is utilized for making spider wasp eggs.
| (14) |
Here, indicates an operator that is used for achieving uniform crossover whereas male and female spider wasps are represented by and .
Step 7: Re-evaluate fitness function The fitness function is re-evaluated until achieving maximum value to obtain best solution.
Step 8: Termination The steps of ASWO are continually performed and terminated after acquiring optimum solution.
5 Results and Discussion
The results of ASWO designed for path planning in mobile multi-robots are described below.
5.1 Experiment Setup
The newly devised ASWO is experimentally implemented in PYTHON tool using simulation. Table 1 signifies the simulation parameters. The parameters used in the proposed ASWO are selected based on a grid search strategy to systematically explore various combinations and identify the most effective configuration. The chosen values lead to superior performance in terms of convergence speed, path optimality, and obstacle avoidance.
Table 1 Simulation parameters
| Parameters | Values |
| Population size | 50 |
| Max iterations | 1000 |
| Spider movement factor | 0.8 |
| Wasp movement factor | 0.5 |
| Crossover rate | 0.2 |
| Trade-off rate | 0.3 |
| Max velocity | 2 m/s |
| Turning Radius | 0.5 km |
| Communication range | 15 km |
| Cooperation factor | 0.6 |
5.2 Experimental Outcomes
The experimental results of ASWO are demonstrated in Figure 4. Figure 4(a) shows the fixed obstacles and single target whereas Figure 4(b) illustrates fixed obstacles and multiple targets.
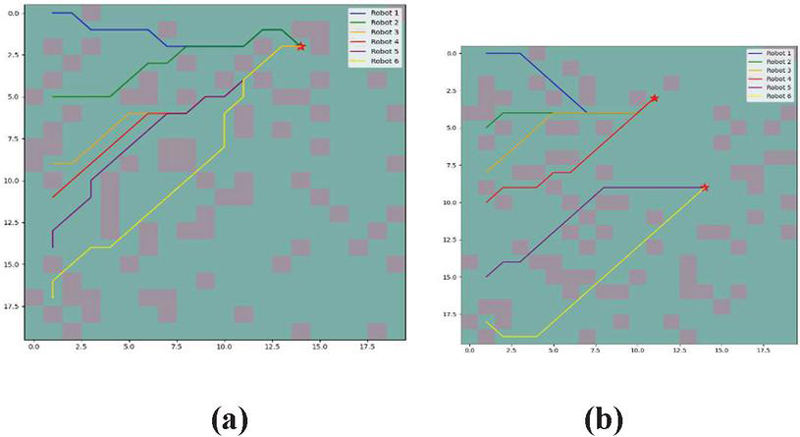
Figure 4 Experimental results, (a) Fixed obstacles and single target, (b) Fixed obstacles and multiple targets.
5.3 Evaluation Metrics
The metrics considered to assess ASWO are path length, path smoothness and fitness, which are already explained in Sections 4.1.1, 4.1.2 and 4.2.2.
5.4 Comparative Techniques
IPSO [1], GLS [2], ACO–DWA [3], LMBSWO [4] MDHO algorithm, QAOA [16], and TIRL [17] are the comparative methods taken into concern to show the effectiveness of ASWO.
5.5 Comparative Evaluation
The comparative analysis of ASWO is carried out based on two setups like fixed obstacles and single target as well as fixed obstacles and multiple targets.
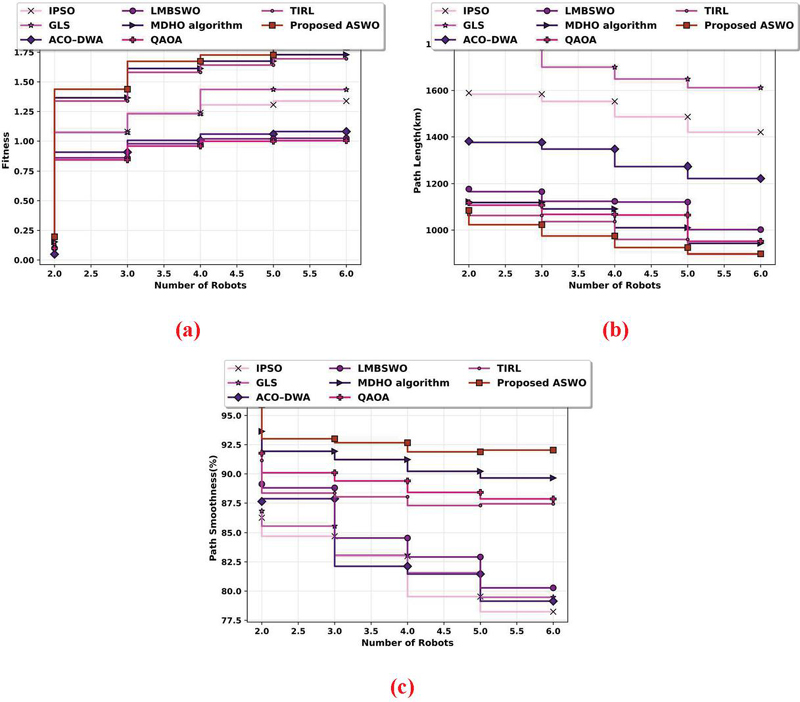
Figure 5 Comparative analysis of ASWO based on fixed obstacles and single target, (a) Fitness, (b) Path length, (c) Path smoothness.
5.5.1 Analysis based on fixed obstacles and single target
Figure 5 presents the comparative analysis of the proposed ASWO algorithm under varying numbers of robots, with detailed results discussed for the case of six robots. The evaluation is based on three key metrics, such as fitness, path length, and path smoothness. Figure 5(a) specifies an analysis of ASWO in terms of fitness. Fitness obtained by ASWO is 1.795 whereas other techniques attained 1.338, 1.434, 1.081, 1.024, 1.729, 1.003, and 1.695. This improvement is primarily attributed to ASWO’s adaptive mechanism, which dynamically balances exploration and exploitation by adjusting movement behaviors during the optimization process. An estimation of ASWO with respect to path length is shown in Figure 5(b). The traditional algorithms achieved path length of 1420.157 km, 1611.902 km, 1222.257 km, 1002.035 km, 943.073 km, 951.933 km, and 895.919 km whereas ASWO obtained 897.883 km. The reduction in path length is due to ASWO’s ability to incorporate both local and global search strategies effectively. Figure 5(c) signifies an evaluation of ASWO based upon path smoothness. ASWO acquired path smoothness of 91.121% whereas existing methods achieved 76.841%, 78.866%, 80.788%, 88.630%, 90.053%, 87.858%, and 87.436%. The high path smoothness demonstrates that ASWO not only finds shorter paths but also ensures fewer abrupt changes in direction. This is achieved through the algorithm’s fitness function, which explicitly includes smoothness as a criterion.
5.5.2 Analysis based on fixed obstacles and multiple targets
Figure 6 illustrates the performance evaluation of the proposed ASWO algorithm when handling multiple targets in the presence of fixed obstacles, with a specific focus on scenarios involving six robots. The analysis is conducted based on fitness, path length, and path smoothness. Figure 6(a) indicates an assessment of ASWO concerning fitness. The conventional algorithms achieved fitness of 1.372, 1.562, 1.108, 1.059, 1.757, 1.722, and 1.063 whereas ASWO obtained 1.818. An analysis of ASWO based upon path length is delineated in Figure 6(b). ASWO achieved 1052.695km whereas classical algorithms attained path length of 1747.843 km, 1959.018 km, 1499.298 km, 1296.534 km, 1237.383 km, 1113.645 km, and 1163.140 km. Figure 6(c) represents an estimation of ASWO in terms of path smoothness. Path smoothness acquired by ASWO is 91.121% whereas traditional algorithms attained 76.841%, 78.866%, 80.788%, 88.630%, 90.053%, 89.895%, and 85.654%. Overall, the improved results are a direct consequence of ASWO’s hybrid structure, which combines biologically inspired optimization with adaptive parameter control. This allows the algorithm to respond effectively to dynamic environmental demands, such as increased task complexity due to multiple targets.
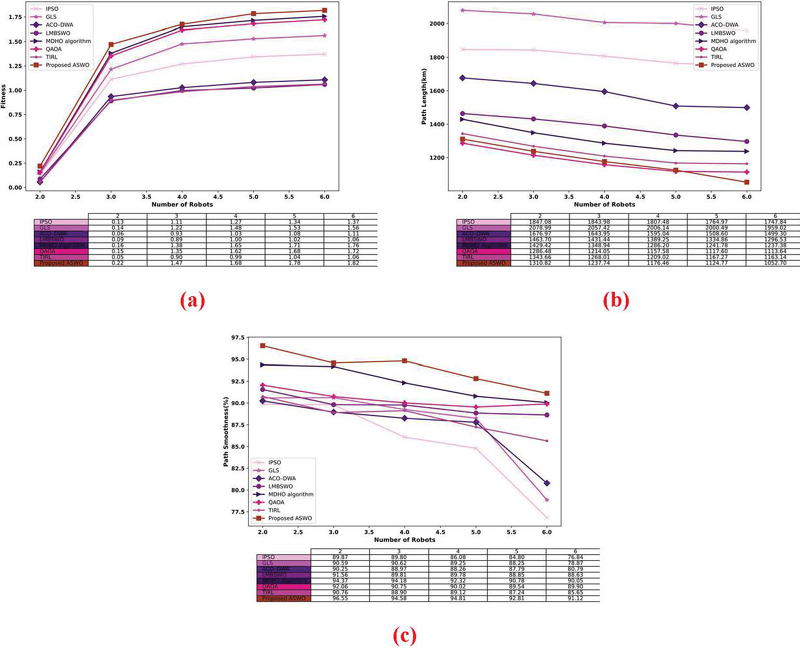
Figure 6 Comparative analysis of ASWO based on fixed obstacles and multiple targets, (a) Fitness, (b) Path length, (c) Path smoothness.
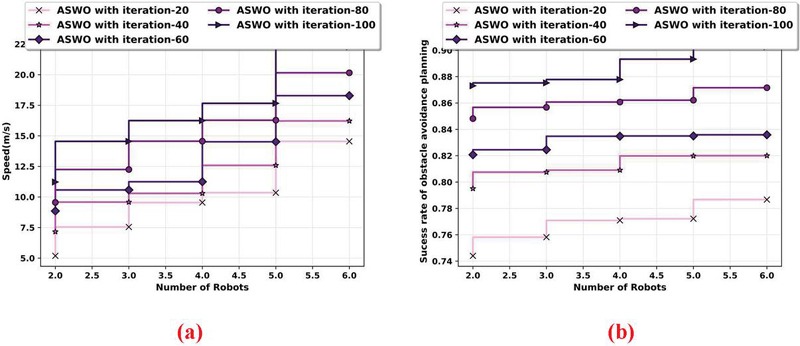
Figure 7 Performance analysis of ASWO based on iterations, (a) Speed, and (b) Success rate of obstacle avoidance planning.
5.6 Performance Analysis
Figure 7 shows an evaluation of ASWO based on different iterations. The speed analysis is provided in Figure 7(a). When the number of robots is 6, the speed of the ASWO with iteration 20, 40, 60, 80, and 100 is 14.55 m/s, 16.22 m/s, 18.29 m/s, 20.16 m/s, and 22.29 m/s. The success rate of obstacle avoidance planning of ASWO with different iterations is given in Figure 7(b). The success rate of obstacle avoidance planning of ASWO with iterations 20 is 0.787, 40 is 0.820, 60 is 0.836, 80 is 0.872, and 100 is 0.903 for number of robots 6.
5.7 Scalability Analysis
Figure 8 presents the runtime comparison of the proposed ASWO and existing algorithms as the number of robots increases from 7 to 12. The results indicate that the proposed ASWO consistently maintains a lower runtime compared to other methods, such as IPSO, GLS, ACO-DWA, LMBSWO, and others. As the number of robots increases, the runtime of all algorithms rises due to higher computational complexity. However, ASWO shows a slower growth in runtime, demonstrating its better scalability. For instance, when the number of robots increases from 7 to 12, ASWO’s runtime increases from 3.65 s to 9.00 s, whereas IPSO increases from 12.38s to 19.85 s, and GLS from 11.28 s to 18.34 s. This improvement is due to adaptive strategy of ASWO and efficient task distribution mechanism, which minimize redundant calculations and optimize path computations even in multi-robot settings.
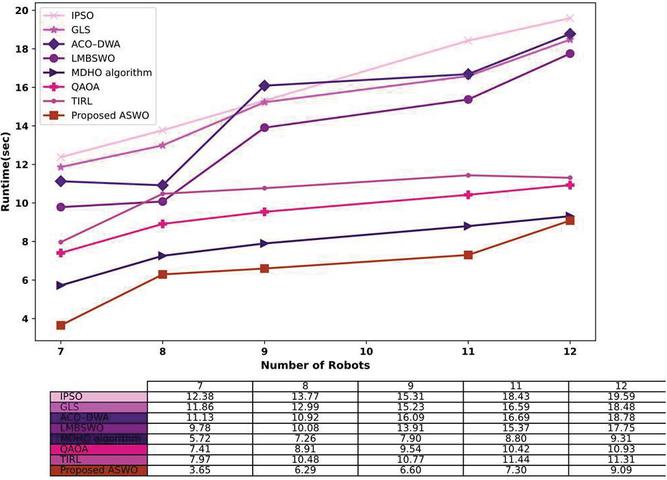
Figure 8 Scalability analysis.
Table 2 Comparative discussion of ASWO
| Metrics/Methods | IPSO | GLS | ACO–DWA | LMBSWO | MDHO Algorithm | QAOA | TIRL | Proposed ASWO |
| Fixed obstacles and single target | ||||||||
| Fitness | 1.338 | 1.434 | 1.081 | 1.024 | 1.729 | 1.003 | 1.695 | 1.795 |
| Path length (km) | 1420.157 | 1611.902 | 1222.257 | 1002.035 | 943.073 | 951.933 | 895.919 | 897.883 |
| Path smoothness (%) | 76.841 | 78.866 | 80.788 | 88.630 | 90.053 | 89.895 | 85.654 | 91.121 |
| Fixed obstacles and multiple targets | ||||||||
| Fitness | 1.372 | 1.562 | 1.108 | 1.059 | 1.757 | 1.722 | 1.063 | 1.818 |
| Path length (km) | 1747.843 | 1959.018 | 1499.298 | 1296.534 | 1237.383 | 1113.645 | 1163.140 | 1052.695 |
| Path smoothness (%) | 76.841 | 78.866 | 80.788 | 88.630 | 90.053 | 87.858 | 87.436 | 91.121 |
5.8 Comparative Discussion
Table 2 explains the values acquired by comparative algorithms and ASWO for the analysis carried out. Fitness acquired by ASWO is 1.795 while considering number of robots 6 whereas other algorithms obtained 1.338, 1.434, 1.081, 1.024, 1.729, 1.003, and 1.695. The high fitness depicts that ASWO had a capability for navigating complicated environments securely, and effectively while adapting to dynamic states as well as uncertainties. When number of robots 6, the conventional algorithms attained path length of 1420.157 km, 1611.902 km, 1222.257 km, 1002.035 km, 943.073 km, 951.933 km, and 895.919 km whereas ASWO achieved 897.883 km. The maximum path length specifies that ASWO is capable to recompute their paths for preventing suddenly appearing obstacles. ASWO obtained path smoothness of 91.121% whereas other algorithms acquired 76.841%, 78.866%, 80.788%, 88.630%, 90.053%, 89.895%, and 85.654% for number of robots=6. A maximal path smoothness specifies that ASWO reduced the requirement for abrupt maneuvers. From the analysis, it can be concluded that, ASWO is an effective algorithm for path planning in mobile multi-robots. Furthermore, ASWO achieved maximum fitness and path smoothness of 1.795 and 91.121% as well as minimum path length of 897.883 km while considering number of robots 6 for fixed obstacles and single target.
5.9 Statistical Analysis
The Analysis of Variance (ANOVA) test is conducted to assess the statistical significance of the performance differences among the compared methods. The results are shown in Table 3, where the calculated F-value is 1.2506, and the P-value is 0.02968, which is less than the standard significance level of 0.05. This indicates that there is a statistically significant difference among the algorithms’ performances at the 95% confidence level. Additionally, the confidence interval for the proposed ASWO’s performance is between 89.852 and 96.366, further supporting the consistency and reliability of its results.
Table 3 ANOVA test
| Sum of Squares | Degrees of Freedom | F | P-value | |
| C | 0.085566 | 4 | 1.2506 | 0.02968 |
| Residual | 0.02258 | 120 |
Table 4 Analysis based on computational time and memory
| Methods/No. of Robots | IPSO | GLS | ACO–DWA | LMBSWO | MDHO Algorithm | QAOA | TIRL | Proposed ASWO |
| Computational time (Sec) | ||||||||
| 2 | 7.75 | 7.53 | 7.24 | 6.74 | 6.44 | 6.21 | 5.99 | 3.80 |
| 3 | 10.80 | 10.74 | 10.58 | 10.17 | 9.87 | 8.88 | 8.62 | 4.93 |
| 4 | 13.16 | 12.47 | 12.33 | 11.87 | 11.66 | 11.47 | 11.45 | 7.89 |
| 5 | 16.71 | 16.66 | 15.55 | 14.69 | 14.41 | 12.43 | 12.11 | 8.89 |
| 6 | 19.29 | 18.43 | 18.25 | 18.00 | 17.35 | 16.73 | 16.36 | 13.37 |
| Memory (MB) | ||||||||
| 2 | 19.91 | 19.36 | 18.60 | 17.33 | 16.56 | 15.96 | 15.40 | 9.75 |
| 3 | 27.74 | 27.60 | 27.18 | 26.13 | 25.37 | 22.81 | 22.15 | 12.66 |
| 4 | 33.81 | 32.05 | 31.68 | 30.50 | 29.96 | 29.47 | 29.42 | 20.28 |
| 5 | 42.95 | 42.80 | 39.96 | 37.75 | 37.03 | 31.94 | 31.12 | 22.85 |
| 6 | 49.57 | 47.36 | 46.91 | 46.25 | 44.59 | 42.99 | 42.05 | 34.36 |
5.10 Analysis Based on Computational Time and Memory
Table 4 presents a comparative analysis of computational time and memory usage across various algorithms as the number of robots increases from 2 to 6. The results demonstrate that the proposed ASWO consistently outperforms all baseline methods in terms of both execution time and memory efficiency. In terms of computational time, ASWO recorded the lowest runtime across all robot counts. For instance, with 6 robots, ASWO required only 13.37 seconds, compared to 19.29 sec for IPSO, 18.43 sec for GLS, 18.25 sec for ACO–DWA, 18.00 sec for LMBSWO, 17.35 sec for MDHO algorithm, 16.73 sec for QAOA, and 16.36 sec for TIRL. Similarly, for memory usage, ASWO demonstrated the least consumption. At 6 robots, ASWO used only 34.36 MB, whereas IPSO, GLS, ACO–DWA, LMBSWO, MDHO algorithm, QAOA, and TIRL consumed 49.57 MB, 47.36 MB, 46.91 MB, 46.25 MB, 44.59 MB, 42.99 MB, and 42.05 MB, respectively. This reduction is mainly due to the lightweight design of ASWO.
6 Conclusion
Path planning is the basic feature of mobile robot’s navigation. It plays an essential part in facilitating robots to automatically navigate during avoidance of obstacles. However, conventional algorithms developed for path planning confront challenges such as obstacle avoidance and possibility to get stuck in a local minimum along the path. Also, obstacle avoidance in the denser obstacle environments is complicated to be effective and efficient due to attributes of non-linearity optimization issues. In this research, ASWO is designed for path planning in mobile multi-robots. Initially, an environment utilizing multiple robots and targets along with obstacles is simulated. Afterwards, multi-objectives such as path smoothness, obstacle avoidance and path length are defined for path planning. Finally, path planning is carried out using ASWO, which is modeled by combining adaptive concept with SWO. Furthermore, ASWO attained maximum fitness and path smoothness of 1.795 and 91.121% as well as minimum path length of 897.883km for fixed obstacles and single target when number of robots 6. However, the proposed study assumes a 2D static environment with fixed obstacles, which simplifies the real-world complexity. In future, highly complicated factors such as large-scale robots, non-flat terrain and so on will be considered. Also, Pareto front-based optimization will be integrated in the further extension of this work.
Conflict of Interest
The author declares that there will be no conflict of interest.
Data Availability Statement
No data were used to support this study.
References
[1] Zhang, T., Xu, J. and Wu, B., “Hybrid path planning model for multiple robots considering obstacle avoidance”, IEEE Access, vol. 10, pp. 71914–71935, 2022.
[2] Muhammad, A., Ali, M.A., Turaev, S., Abdulghafor, R., Shanono, I.H., Alzaid, Z., Alruban, A., Alabdan, R., Dutta, A.K. and Almotairi, S., “A generalized laser simulator algorithm for mobile robot path planning with obstacle avoidance”, Sensors, vol. 22, no. 21, pp. 8177, 2022.
[3] Wang, Q., Li, J., Yang, L., Yang, Z., Li, P. and Xia, G., “Distributed multi-mobile robot path planning and obstacle avoidance based on ACO–DWA in unknown complex terrain”, Electronics, vol. 11, no. 14, pp. 2144, 2022.
[4] Gao, Y., Li, Z., Wang, H., Hu, Y., Jiang, H., Jiang, X. and Chen, D., “An Improved Spider-Wasp Optimizer for Obstacle Avoidance Path Planning in Mobile Robots”, Mathematics, vol. 12, no. 17, pp. 2604, 2024.
[5] Usha, G., “Deep Learning Driven LSTM with Spider Wasp Optimizer Algorithm for Frictional Force Based Landslides Prediction Model”, Journal of Intelligent Systems & Internet of Things, vol. 14, no. 1, 2025.
[6] Mac, T.T., Copot, C., Tran, D.T. and De Keyser, R., “A hierarchical global path planning approach for mobile robots based on multi-objective particle swarm optimization”, Applied Soft Computing, vol. 59, pp. 68–76, 2017.
[7] Das, P.K., “Hybridization of Kidney-Inspired and sine–cosine algorithm for multi-robot path planning”, Arabian Journal for Science and Engineering, vol. 45, no. 4, pp. 2883–2900, 2020.
[8] Han, J. and Seo, Y., “Mobile robot path planning with surrounding point set and path improvement”, Applied Soft Computing, vol. 57, pp. 35–47, 2017.
[9] Victerpaul, P., Saravanan, D., Janakiraman, S. and Pradeep, J., “Path planning of autonomous mobile robots: A survey and comparison”, Journal of Advanced Research in Dynamical and Control Systems, vol. 9, no. 12, pp. 1535–1565, 2017.
[10] Mirjalili, S. and Lewis, A., “The whale optimization algorithm”, Advances in engineering software, vol. 95, pp. 51–67, 2016.
[11] Beyer, H.G. and Schwefel, H.P., “Evolution strategies – a comprehensive introduction”, Natural computing, vol. 1, pp. 3–52, 2002.
[12] Heidari, A.A., Mirjalili, S., Faris, H., Aljarah, I., Mafarja, M. and Chen, H., “Harris hawks optimization: Algorithm and applications”, Future generation computer systems, vol. 97, pp. 849–872, 2019.
[13] Rocca, P., Oliveri, G. and Massa, A., “Differential evolution as applied to electromagnetics”, IEEE Antennas and Propagation Magazine, vol. 53, no. 1, pp. 38–49, 2011.
[14] Shabani, A., Asgarian, B., Salido, M. and Gharebaghi, S.A., “Search and rescue optimization algorithm: A new optimization method for solving constrained engineering optimization problems”, Expert Systems with Applications, vol. 161, pp. 113698, 2020.
[15] Mirjalili, S., Mirjalili, S.M. and Hatamlou, A., “Multi-verse optimizer: a nature-inspired algorithm for global optimization”, Neural Computing and Applications, vol. 27, pp. 495–513, 2016.
[16] Poojith U Rao, Florian Speelman, Balwinder Sodhi, and Sachin Kinge, “A Quantum Computing Approach for Multi-robot Coverage Path Planning,” arXiv:2407.08767, 2024.
[17] Lin Chen, Yaonan Wang, Zhiqiang Miao, Yang Mo, Mingtao Feng, Zhen Zhou, and Hesheng Wang, “Transformer-based Imitative Reinforcement Learning for Multi-Robot Path Planning,” IEEE Transactions on Industrial Informatics, vol. 19, no. 10, pp. 10233–10243, 2023.
[18] Zike Yuan, Chenhao Yao, Xiaoxu Liu, Zhiwei Gao, Wenwei Zhang, “Multiagent Formation Control and Dynamic Obstacle Avoidance Based on Deep Reinforcement Learning”, IEEE Transactions on Industrial Informatics, vol. 21, no. 6, pp. 4672–4682, 2025.
[19] Bohan Feng, Youyi Bi, Mian Li, Liyong Lin, “A Decentralized Multi-Agent Path Planning Approach Based on Imitation Learning and Selective Communication”, Journal of Computing and Information Science in Engineering, vol. 24, no. 8, 2024.
Biographies

Sakthitharan Subramanian is an accomplished academic and researcher in computational intelligence. He currently serves as an Assistant Professor in the Department of Computational Intelligence at the School of Computing, SRMIST, India. With a diverse range of expertise, Dr. Sakthitharan specializes in areas such as Algorithms, Web Technologies, Artificial Intelligence, and Mobile Applications. His research interests primarily focus on cutting-edge topics including Robotics Maneuvering, Mobile Sensors, Positioning systems, Navigation Systems, and Disaster Response. It also extends to other important areas such as Human-Computer Interaction, Automation, Blockchain and Machine Learning. As an educator and researcher, Dr. Sakthitharan is actively involved in various academic activities, including guiding interdisciplinary projects and contributing to funded research and consultancy initiatives. His professional expertise is further demonstrated through his involvement in numerous professional projects.

B. Renuka Devi (Senior Member, IEEE) received graduation in Computer Science and Engineering from Anna University, Chennai and master’s degree in Software Engineering from Anna University, Chennai and currently pursuing Phd in Department of Computational Intelligence, SRM Institute of Science and Technology, Katttakulathur. Her research interests include Secure Wireless Communication in UAV Networks. She is a lifetime member of Indian Society for Technical Education.

F. Sangeetha Francelin Vinnarasi, received her, M.Tech degree in Computer Science and Engineering from S.R.M Institute of Science and Technology, Kattankulathur, Chennai and PhD in Manonmaniam Sundaranar University, Tirunelveli. She is currently working as a Professor in the Department of Information Technology, St.Joseph’s Institute of Technology, Chennai. She has more than 15 years teaching experience. Her area of interest includes Vehicular Adhoc Networks, Wireless Networks, Image processing and IoT.

Velliangiri Sarveshwaran earned his Bachelor’s degree in Computer Science and Engineering from Anna University, Chennai, and completed his Master’s in Computer Science and Engineering at Karpagam University, Coimbatore, followed by a Doctor of Philosophy in Information and Communication Engineering from Anna University, Chennai. He completed his Post-Doctoral Research Fellowship in the Department of Computer Science and Information Engineering at National Chung Cheng University, Chiayi, Taiwan, and is currently serving as a Research Associate Professor at the SRM Institute of Science and Technology (SRMIST), India. He is a senior member of both the Institute of Electrical and Electronics Engineers (IEEE) and the International Association of Engineers (IAENG). Dr. Velliangiri actively reviews for IEEE Transactions, Elsevier, Springer, Inderscience, and other reputable Scopus-indexed journals, with expertise in Blockchain, Security and Privacy, and Optimization techniques. With over 50 publications in SCI Indexed journals and more than 30 presentations at international conferences, he also contributes as a technical program committee member and conference chair at numerous international events. Furthermore, Dr. Sarveshwaran has edited and authored books published by esteemed publishers such as Elsevier, Springer, River, and CRC Press Publishers. He serves as the series editor of “Artificial Intelligence for Sustainability” at CRC Press, Taylor and Francis Group, and holds editorial positions including Area Editor at the EAI Endorsed Journal of Energy (Scopus) and Academic Editor at the Journal of Wireless Communication and Mobile Computing (Scopus, SCI) with Hindawi Publishers. His significant contributions to the field were recognized by Stanford University in 2022,2023, where he was ranked among the Top 2% of Scientists globally in the field of Artificial Intelligence & Image Processing, Information & Communication Technology based on his research publications.
Journal of Mobile Multimedia, Vol. 21_6, 997–1022.
doi: 10.13052/jmm1550-4646.2161
© 2025 River Publishers