Autonomous Fire Extinguisher Rover with Self-Preservation and Emergency Protocols Using Arduino
Arghya Ghosh1, Shobham Guha1, Kamakhya Narain Singh1,*, Chinmaya Misra1, Anupam Samui2 and Arijit Dutta3
1School of Computer Applications, Kalinga Institute of Industrial Technology, Bhubaneswar, India
2School of Electronics Engineering, Kalinga Institute of Industrial Technology, Bhubaneswar, India
3Department of Computer Sc. & Engineering, Symbiosis Institute of Technology, Symbiosis International (Deemed University), Pune, India
E-mail: arghyaofficial818@gmail.com; shobhamguha36@gmail.com; kamakhya.vphcu@gmail.com; cmisra@yahoo.com; asamuifet@kiit.ac.in; arijit1995@gmail.com
*Corresponding Author
Received 08 January 2025; Accepted 01 May 2025
Abstract
In this paper, we identify the drawbacks of current fire extinguisher robots (FER) and outline the design and development of a fire extinguisher rover that combines a sophisticated self-preservation program with automated response to fires. Traditional fire extinguisher robot can detect and fight fire but they don’t protect themselves from harsh environmental conditions causing operational failures. In light of this, we have created a rover that fights fires, while also exercising its own fire-stopping measures! At its core, the central processing unit of the rover is an Arduino Mega microcontroller. It is the hardware server and is composed of several sensors and components such as gas sensor, fire sensor, MLX90614 contactless temperature sensor, ultrasound sensor, and HC-05 Bluetooth module which is used for communication In addition, it has Peltier module, DC fan, relay modules, 2 X DC pumps, 4 X DC motors, pipe outlets system and Arduino Uno. Thus, the proposed design will improve not only the safety of the firefighting robot but would also aid to reduce lives lost along with property damage caused.
Keywords: Fire extinguisher rover, Arduino mega, self-preservation mechanisms, emergency protocols, peltier module, autonomous navigation, firefighting robotics.
1 Introduction
Here, we present the complete hardware and software architecture that make this a self-preserving fire extinguisher rover (FER). It lays out the design considerations, the implementation steps and the operational workflow. The ability of the rover to autonomously navigate for its own safety around fire extinguishing tasks is a huge step forward in the area of firefighting robots [1]. Also explored is the ongoing improvements in the industrial arena, discussing the prospect of implementing a camera module for visual feedback and Wi-Fi capabilities for remote monitoring to further enhance its functionality [2].
The first version contained many sensors and components like a gas sensor, a fire sensor, an MLX90614 contactless temperature sensor, an ultrasound sensor, and an HC-05 Bluetooth module. This is also why the rover has a heat sink, controlled by a Peltier module and a DC fan, as well as two DC pumps powered by relay modules. The mobility is provided by four DC motors, and a pipe outlet system takes care of fire extinguishing in an efficient manner [21]. Rover can calculate and react to temperature on the ground. The ability to monitor and respond to ground temperature is one of the essential properties of this rover. The MLX90614 sensor reads the temperature periodically, and if it’s more than 60 degrees Celsius, the rover runs a cooling system for its tires. This mechanism consists of spraying cooled water from the Peltier module, ensuring that the tires do not overheat and become damaged, which could immobilize the rover in a dangerous zone [13]. Additionally, the ultrasound sensor continually monitors the water level in the tank, alerting the user if it becomes rather low, and triggering a critical emergency protocol if necessary [14]. During each emergency case, such as flammable gases’ presence detected through the gas sensor or one overheating Arduino Mega, the rover will switch the control onto a backup Arduino Uno. This shift is controlled via a relay module and lets the rover prioritize moving and escaping from dangerous locations without users acting. Coding the Arduino Uno just governs the L293D motor driver for DC motors, making sure of rapid escape from hazard.
To assist in extinguishing of fires, several firefighting robots have been developed, particularly in hazardous environments for which human intervention is risky [3]. These same robots considerably improved the capabilities of rescue squads, offering a safer option for actual firemen within perilous spots. However, many existing models are limited in their ability to quite sustain prolonged exposure to fairly extreme conditions, along with high temperatures and in the presence of flammable gases [4, 5]. These limitations with ease can lead into functional failures. They can also compromise the robot’s effectiveness in critical scenarios.
The suggested rover employs on an Arduino Mega microcontroller; it functions as the core processor, overseeing different sensors with actuators that perceive at and react to fire crises. A gas sensor, fire sensor, MLX90614 contactless temperature sensor, ultrasound sensor, as well as an HC-05 Bluetooth module for communication, are necessary parts. The rover is built for independently spotting of blazes, putting them out via a water setup, and to shield itself against intense heat with a cooling feature that stops tire harm [6]. Also, it includes, with it, a safety measure that transfers command to an alternate Arduino Uno during key malfunctions, promising active function and secure removal from unsafe areas.
1.1 Objective
The chief objective during the time of this research is to carefully design and to readily develop a Fire Extinguisher Rover cum Survey Robot that provides an advanced and reliable solution for the improved fire detection and extinguishing while particularly ensuring its running safety. The research’s special goals include several items: Autonomous Fire Detection and Extinguishing, Self-preservation Mechanisms, and Emergency mechanism. Further goals feature User Communication and Alerts, Improved Mobility and Navigation, Scalability, and Educational and Practical Value.
1.2 Motivation
The underlying motivation behind the thorough development of the Fire Extinguisher Rover comes from several key factors including improving the overall safety, reliability, greater effectiveness of firefighting operations in hazardous environments, dealing with limitations of existing robots, technical improvements, educational value, and future industrial applications.
1.3 Problem Statement
These robots have become necessary during emergency response, helping in hazardous situations when humans cannot safely intervene. Although, the effectiveness and dependability of the existing models are frequently obscured by substantial constraints, which can be roughly divided into the following categories: Environmental Hazard Risk, Minimal Autonomous Utility, Poor Alarm and Notification Systems, Absence of Urgent Instructions, and Scalability. To overcome these limitations, a Fire Extinguisher Rover is developed. It is designed to identify extinguish fires automatically and protect itself from environmental dangerous, temperature monitoring, water level detection, and a backup microcontroller, which ensure uninterrupted function and safe escape from danger zone.
The contributions of this research are as follows:
• A robust and autonomous fire extinguisher rover is developed, integrating advanced self-preservation mechanisms and emergency protocols to enhance firefighting operations in hazardous environments.
• The rover is equipped with an MLX90614 contactless temperature sensor and Peltier module-based cooling system, ensuring continuous operation and preventing component damage due to extreme heat.
• This work introduces a dual-microcontroller system with Arduino Mega and backup Arduino Uno, enabling seamless control transfer during critical failures and safe evacuation from dangerous zones.
• Reliable user communication and alert systems are established using HC-05 Bluetooth modules, allowing real-time monitoring and remote control of the rover.
• The rover features water level detection and gas sensors for early hazard warning, supporting safer operation and timely refills.
• This design is scalable, allowing future upgrades such as Wi-Fi connectivity, camera modules, and additional sensors to broaden its use in industrial and remote firefighting applications.
• Comprehensive testing and calibration validate the rover’s functionality in fire detection, extinguishing, and emergency response, making it a valuable tool in environments where human intervention poses risks.
Remaining sections are categorized as follows: Section 2 contains the related work, Section 3 explains the proposed methodology, Section 4 analyses the results and Section 5 summarized the proposed work.
2 Related Work
Although there are many Arduino-powered fire extinguisher robots readily accessible, they usually underperform after continuous exposition to excessive temperatures and other dangers. This study extends previous models through the inclusion of additional sensors and hardware for improving self-preservation capabilities. These are a few instances of current work along with its shortcomings. A fundamental illustration of a fire extinguishing robot which makes use of sensors to recognize fire and releases chemical-based or water extinguishers is an Arduino-based model [7]. These robots may be destroyed or malfunction after being subjected to fire for a lengthy amount of time because they usually lack protective mechanisms against extreme temperatures.
The Self-Navigating Fire Prevention Robot uses flame sensors to find its way to the fire’s origin on its own [8]. These robots are effective in identifying and putting out flames, but they lack self-preservation mechanisms to shield their parts from the extreme heat they experience while in use. In order to identify dangerous gasses and take precautions against them, the Gas Detection and Fire Fighting Robot combines gas sensors [9, 10]. Although these robots have the capacity of recognizing harmful gasses, they could possibly nevertheless not have all the necessary self-preservation mechanisms to guard against heat or other environmental damage. Temperature sensors have been employed within the Advanced Fire Fighting Robot with Temperature Sensing to keep an eye on the area around it [11]. These robots have the capability of monitoring their temperature, however they may lack self-cooling or overheating systems, which may result in component failure. Multiple functions, such as navigation on its own, gas detection, and liquid spraying, are implemented in the Multipurpose Fire Fighting Robot [12]. Considering their advanced features, these robots typically lack emergency procedures or backup systems to ensure uninterrupted operation in the case of significant problems.
Enhancements Proposed in this Research
All of these constraints have been solved by the proposed Automatic Fire Extinguisher Rover, which has complex self-preservation methods used in addition effective communication systems. Some of the primary improvements are scalability, enhanced communication systems, detailed emergency protocols, self-preservation mechanisms, and following developments. Several capabilities, such as navigation on its own, gas detection, and water spraying, are combined in the Multi-purpose Fire Fighting Robot [15]. Considering their technological advances, these robots usually do not have rescue measures or backup systems to ensure uninterrupted functionality in the case of significant breakdowns.
Uses a contactless temperature sensor (MLX90614) to measure the temperature of the ground and turn on cooling mechanisms to prevent the rover from becoming too hot. In addition, the rover has a Peltier module and a DC fan to cool water before it is sprayed on the tires, avoiding damage from excessive heat [16]. By switching control to a backup Arduino Uno in the event of significant failures, including overheating or the detection of combustible gasses, the rover can ensure safe evacuation from hazardous zones and ongoing operation. Control is smoothly transferred to the backup microcontroller using a relay module, which controls this emergency mechanism [17]. For dependable communication with the remote control, the rover makes use of HC-05 Bluetooth modules. This makes it possible to monitor in real time and notify the user of dangerous situations like low water levels or overheating, which guarantees prompt action and decision-making [18]. The flexible architecture makes it possible to incorporate extra features like Wi-Fi connectivity for remote monitoring, camera modules for visual input, and more sensors for thorough environmental assessment. The rover’s capabilities are expanded for industrial uses and upcoming technology developments by these improvements [19, 20].
The concept for the Fire Extinguisher Rover Robot solves the deficiencies of existing models while building on their strengths, making it an important improvement in the field of firefighting robots. It provides a safer and more reliable emergency response option, thereby improving the safety and operational performance of firefighting operations.
3 Proposed Methodology
The design process of the Fire Extinguisher Rover cum Survey Robot includes methodology that covers the selection of hardware, integration of components, development of software, and testing. This methodology enables the rover to autonomously discern fires and extinguish them, shield itself in hostile environments, and communicate with the user. These steps descried below are aimed at achieving the set goals.
3.1 Hardware Selection
The hardware components are selected based on their functionality, reliability, and cost-effectiveness. The key components include:
I. Microcontroller:
Arduino Mega: It serves as the main microcontroller, coordinates all sensors and actuators and provides sufficient I/O pins and memory for complex tasks.
Arduino Uno: It acts as a backup microcontroller, ensures continued operation during critical failures and handles emergency evacuation procedures.
II. Sensors:
Fire Sensor: It detects the presence of fire and triggers the fire extinguishing mechanism.
MLX90614 Contactless Temperature Sensor: It monitors ground temperature to prevent overheating and ensures real-time temperature data for responsive actions.
Gas Sensor: It detects flammable gases, provides early warning to prevent fire hazards.
Ultrasound Sensor: It monitors water level in the tank, ensures sufficient water supply for firefighting and alerts the user when water level is low.
III. Actuators:
L293D Motor Driver: It controls the four DC motors and manages direction and speed of the rover.
DC Motors (4x 150 RPM): It provide mobility to the rover and ensure robust and efficient movement.
DC Pumps: Pump water for extinguishing fires and cooling the tires.
Peltier Module and DC Fan: It is used to cool the water before it is sprayed on the tires and protect the rover from overheating.
Relay Module (5x): It manages switching of components and emergency protocols and ensures reliable control of multiple devices.
IV. Communication:
HC-05 Bluetooth Module (Master & Slave): It enables communication between the rover and the remote control and provides reliable data transmission.
V. Other Components:
DC Pumps: Pump water for extinguishing fires and cooling the tires.
Liquid Crystal Display (LCD): Displays important messages sent by the rover to the user.
LEDs (5x): Indicate different alert signals from the rover.
Push Buttons (10x): Provide manual control for various functions.

Figure 1 Rover controller with liquid crystal display, LEDs, push button.
3.2 System Integration
System integration involves connecting all hardware components to the Arduino Mega and Arduino Uno, ensuring seamless communication and control.
I. Sensor Integration: Connect the fire sensor, MLX90614 temperature sensor, gas sensor, and ultrasound sensor to the Arduino Mega. Program the Arduino Mega to read data from these sensors and implement algorithms to trigger appropriate actions based on sensor readings.
II. Actuator Control: Connect the L293D motor driver to the Arduino Mega to control the DC motors, integrate the Peltier module and DC fan with the relay module for temperature regulation, connect the DC pumps to the relay module and program the microcontroller to control water flow based on sensor data.
III. Communication Setup: Pair the HC-05 Bluetooth modules (Master and Slave). Establish a reliable communication link between the rover and the remote control and program the Arduino Nano in the remote control to display messages on the LCD. Also, manage manual controls using the push buttons and LEDs.
IV. Software Development: Software development involves writing and refining the code for the Arduino Mega, Arduino Uno, and Arduino Nano to ensure seamless operation and communication.
V. Sensor Data Processing: Write code to continuously read data from the fire sensor, temperature sensor, gas sensor, and ultrasound sensor and implement algorithms to trigger the fire extinguishing mechanism and cooling system based on sensor readings.
VI. Actuator Control: Develop functions to control the DC motors, Peltier module, DC fan, and DC pumps. Program the relay module to manage switching between the Arduino Mega and Arduino Uno in emergency situations.
VII. Communication Protocols: Write code for the HC-05 Bluetooth modules to send and receive data between the rover and the remote control and implement user alerts messages on the LCD display based on sensor readings and system status.
VIII. Emergency Protocols: Implement an emergency protocol that switches control to the backup Arduino Uno in case of critical failures and ensure seamless transition of control to handle emergency evacuation.
3.3 Working Process
The working process of the Fire Extinguisher Rover involves multiple operational steps, integrating sensor data processing, actuator control, and emergency protocols.
I. Fire Detection and Extinguishing: The fire sensor detects a fire and triggers the DC pumps connected to three pipe outlets. Water is sprayed through the outlets to extinguish the fire. The system ensures continuous monitoring and fire suppression.
II. Self-preservation Mechanisms: The MLX90614 temperature sensor monitors ground temperature. If the temperature exceeds 60 degrees Celsius, the Peltier module and DC fan activate to cool the water. Cooled water is sprayed on the tires to prevent overheating and damage. The ultrasound sensor monitors the water level and alerts the user if it becomes too low. If water level is critically low, an emergency protocol activates.
III. Emergency Situations: If the gas sensor detects flammable gases, the system alerts the user and activates the emergency protocol. If the Arduino Mega overheats, it sends a signal to the relay module to switch control to the Arduino Uno. The Arduino Uno takes over, ensuring the rover evacuates from the hazardous zone. The emergency protocol ensures continuous operation and safe evacuation.
3.4 Testing and Calibration
Rigorous testing and calibration ensure the reliable operation of the rover. The testing process includes:
I. Sensor Calibration: Make sure that the fire sensor, temperature sensor, gas sensor, and ultrasound sensor are all calibrated; make sure every sensor communicates correctly to the changes in the environment.
II. Actuator Testing: Examine the DC motors to ensure precise movement. Additionally, check the cooling capabilities for the Peltier Module and DC cooling fan. Examine the DC pumps and water flow through the pipe outlets to verify their functionality in fire suppression.
III. Emergency Protocols: Simulate emergencies to evaluate the DC motor switching strategy between Master Arduino and Slave Arduino. Validate the proper system activation for backup along with the rover evacuation from dangerous areas.
IV. Communication Testing: Confirm the range between the rover and the remote control using Bluetooth and examine the messaging and alert systems activated on the LCD screen. Also, confirm functionality of manual control through push buttons and LED indicators.
Following the provided methodology ensures robust development strategies during the development of Fire Extinguisher Rover Robot integrating features of autonomous fire detection and extinguishing, self-preservation on hostile conditions, and user-friendly communication. This methodology marks the start for further development and deepening the scope, turning the robot to manage numerous tasks in various sectors.
4 Result and Analysis
The FER Robot application is created and tested for various performance measure like its capability to tackle fire effectively with in built emergency protocol and self protecting mechanism and effective measure and proper communication.
4.1 Fire Detection and Extinguishing
Performance: In this prototype FER can effectively control fire in 2 meter range and in 2 seconds it can able to detect. The DC pumps activated immediately upon fire detection. Three front pipe can throw water to manage the situation. The extinguishing process was typically completed within 10 seconds. The fire sensor demonstrated high sensitivity, ensuring prompt detection of fires. The system successfully avoided false positives during testing, only activating in the presence of real fire.
Extinguishing Efficiency: The water spray pattern effectively covered the area around the fire source, ensuring comprehensive extinguishing. Repeated tests confirmed the system’s reliability in extinguishing fires quickly and effectively.
Limitations: Frequent refilling is required as the capacity of water tank is limited. Larger water container can reduce this overhead.
4.2 Self-Preservation Mechanisms
Performance: We have maintained the water temperature continuously and if the temperature is more than 60 degree then the Peltier module and DC fan immediately take step to cool down the system. In real time we can sense the temperature using MLX90614 contactless temperature sensor and response time is less than 1 second. It can cool the water in very short period.
Effective Water Level Monitoring: Water level is maintained and alert system is there to inform water level downfall. The system can effectively keep temperature low using the integrated Peltier module and DC fan and maintain the temperature in permissible level.
Alert System: In this proposed model ultrasound sensor send alert if water level is below permissible limit and self protecting mechanism help the rover durability in extreme condition.
Limitations: Stable power system is required if recharging options are constraint for remote areas.
4.3 Emergency Protocols
Emergency Detection: Here the proposed system can detect gases in 5 seconds and Arduino Mega able to find excess heat and the backup system take control in less than 1 second to rescure Rover from overheating or hazardous zones.
Reliability: In the proposed model the emmergency protocol work seamlessly even in critical failure stage. The system can manage without external intervention and the risk is minimized by quick response.
Limitations: The proposed system can not handle very complex scenario as advance navigation and limited sensor data in partially observable environment. Further research is needed.
4.4 Communication and User Alerts
Bluetooth Communication: HC-05 module help to communicate between rover and remote module and alert messages are generated and shown in LCD.
Limitations: Due to bluetooth range there may be several issues in large or obstructed areas.
4.5 Overall System Performance
I. The proposed system tested in different scenario and we have noticed that it can douse the fire and can protect itself from hazards effectively. System is scalable and can accommodate camera, or wifi communication in future.
II. Limitations: Efficient power management and power saving technolgy is required for long duration operation and effective communication can enhance range of the model
4.6 Detailed Working Process
I. Initial Setup and Calibration: Sensors and actuators are calibrated to ensure accurate readings and reliable control. The HC-05 Bluetooth modules are paired, establishing a communication link between the rover and the remote control.
II. Normal Operation: The rover patrols the designated area, continuously monitoring for fires, ground temperature, gas presence, and water levels. Sensor data is processed in real-time, with appropriate actions taken based on predefined thresholds and conditions.
III. Fire Detection and Response: Upon detecting a fire, the fire sensor triggers the DC pumps, which spray water through the front pipe outlets. The system monitors the fire situation, adjusting water flow as needed to ensure effective extinguishing.
IV. Self-Preservation: The MLX90614 sensor monitors ground temperature, activating the Peltier module and DC fan if the temperature exceeds 60 degrees Celsius. Cooled water is sprayed on the tires to prevent overheating and ensure sustained mobility.
V. Water Level Monitoring: The ultrasound sensor continuously monitors the water level in the tank. If the water level becomes low, the system alerts the user and activates an emergency protocol if necessary.
VI. Emergency Situations: If the gas sensor detects flammable gases or the Arduino Mega overheats, the system switches control to the backup Arduino Uno. The backup Arduino Uno prioritizes navigating the rover out of the hazardous zone, ensuring safe evacuation.
VII. User Communication: Critical alerts and messages are displayed on the LCD, providing real-time feedback to the user. LEDs indicate different alert signals, and push buttons enable manual control and response to alerts.
4.7 Future Enhancements and Scalability
In future, a camera, Wi-Fi, and sensor array will be integrated and advance navigation algorithms will be implemented for more efficient and autonomous movement in complex environments. Adding a camera module for visual feedback to enhance situational awareness and remote monitoring, Wi-Fi modules for broader communication range and internet-based remote control and incorporating additional sensors for comprehensive environmental assessment, such as smoke detectors and infrared sensors. Figure 2a & b depict view of final rover and Figure 3 presents final model of rover.

Figure 2 (a) Side view of the rover. (b) Front view of the rover.
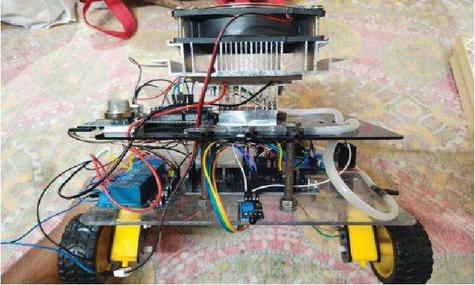
Figure 3 Final model of rover.
5 Conclusion
This model aimed to create a robot that not only autonomously detects and extinguishes fires but also incorporates self-preservation mechanisms to ensure its operational integrity in harsh environments. The comprehensive integration of an Arduino Mega microcontroller, various sensors, and actuators has resulted in a robust and reliable system capable of addressing the limitations of existing fire extinguisher robots. Through meticulous hardware selection and system integration, the rover successfully demonstrated its ability to perform critical tasks under extreme conditions. The proposed Rover achieves its primary objectives of providing an advanced, reliable, and autonomous solution for fire detection and extinguishing while ensuring its own safety in hazardous environments. The innovative design and successful implementation of self-preservation mechanisms and emergency protocols represent a significant contribution to the field of firefighting robotics. This research not only demonstrates the feasibility of such advanced systems but also opens avenues for future developments and applications, potentially saving lives and reducing property damage in fire emergencies.
References
[1] Choudhury, S., Sawant, S., Bidwalkar, L., Marathe, M. and Das, S., 2020, November. Design and implementation of autonomous rover for wildfire extinguishing. In 2020 IEEE International Conference for Innovation in Technology (INOCON) (pp. 1–6). IEEE.
[2] Raghavendran PS, Suresh M, Ranjith Kumar R, Ashok Kumar R, Mahendran K, Swathi S, Kamesh L, Sanjay R. An Intelligent Remote-Controlled Fire Fighting Machine for Autonomous Protection of Human being. Int. J. Adv. Res. Sci. Eng. Technol. 2018 Dec;5:7620–6.
[3] Reddy, M.S., 2021. Design And Implementation Of Autonomous Fire Fighting Robot. Turkish Journal of Computer and Mathematics Education (TURCOMAT), 12(12), pp. 2437–2441.
[4] Reddy, Mohith S. “Design And Implementation Of Autonomous Fire Fighting Robot.” Turkish Journal of Computer and Mathematics Education (TURCOMAT) 12, no. 12 (2021): 2437–2441.
[5] Uday, T.I.R., Ahmad, N., Ghosh, A., Jahin, J., Rahman, M., Iqbal, I., Islam, T., Farzana, F., Rahman, M., Rahman, G.E.U. and Tithi, F.S., 2018, December. Design and implementation of the next generation mars rover. In 2018 21st International Conference of Computer and Information Technology (ICCIT) (pp. 1–6). IEEE.
[6] Azim, M., Hossain, M.Q.R., Khan, M.N.R., Chowdhury, T. and Abdur Razzak, M., 2021. Six-wheeled wireless bomb defusal rover. In Advances in Automation, Signal Processing, Instrumentation, and Control: Select Proceedings of i-CASIC 2020 (pp. 1021–1033). Springer Singapore.
[7] Siegwart, R., Lauria, M., Mäusli, P.A. and Van Winnendael, M., 1998. Design and implementation of an innovative micro-rover. In Robotics 98 (pp. 181–187).
[8] Fonseca Prince, Andre. “Designing and implementing a modular mechatronics infrastructure for autonomous robotic planetary exploration.” PhD diss., Politecnico di Torino, 2020.
[9] Fonseca Prince, Andre. “Designing and implementing a modular mechatronics infrastructure for autonomous robotic planetary exploration.” PhD diss., Politecnico di Torino, 2020.
[10] Sonsale, P., Gawas, R., Pise, S. and Kaldate, A., 2014. Intelligent fire extinguisher system. IOSR Journal of Computer Engineering (IOSR- JCE), 16(1), pp. 59–61.
[11] Rehman, A., Masood, N., Arif, S., Shahbaz, U., Sarwar, F., Maqsood, K., Imran, M. and Pasha, M., 2012, October. Autonomous fire extinguishing system. In 2012 International Conference of Robotics and Artificial Intelligence (pp. 218–222). IEEE.
[12] Raju, Joyal, S. Sheik Mohammed, Johaan Varkey Paul, Georgy Abel John, and Dinanath S. Nair. “Development and implementation of arduino microcontroller based dual mode fire extinguishing robot.” In 2017 IEEE International Conference on Intelligent Techniques in Control, Optimization and Signal Processing (INCOS), pp. 1–4. IEEE, 2017.
[13] Nagesh, M.S., Deepika, T.V. and Stafford Michahial, D.M.S., 2016. Fire Extinguishing Robot. International Journal of Advanced Research in Computer and Communication Engineering, 5(12), pp. 2278–1021.
[14] Mobin, M.I., Abid-Ar-Rafi, M., Islam, M.N. and Hasan, M.R., 2016. An intelligent fire detection and mitigation system safe from fire (SFF). Int. J. Comput. Appl, 133(6), pp. 1–7.
[15] Vignesh, S., Vishnupriya, G., Swetha, P. and Elakkiya, B., 2023. Fire detection and extinguisher system using image processing. International Research Journal of Engineering and Technology, 10(6).
[16] Mamun, Al Tausif, M. D. Sadik, Tanvin Sarkar Shefat, Abdullah Hel Adnan, and Muhibul Haque Bhuyan. “IOT-based Robotic Car With Live Streaming System.” PhD diss., Faculty of Engineering, American International University–Bangladesh, 2023.
[17] Sankaranarayanan, Prashanth, Karthik Suresh, A. Vishnu, and A. Karthikeyan. “Intelligent Path Planning and Machine Learning Integration for Autonomous Firefighting Robots: A Novel Approach for Efficient Fire Suppression.” In 2023 Innovations in Power and Advanced Computing Technologies (i-PACT), pp. 1–8. IEEE, 2023.
[18] Buyi, N.J., 2018. A remote-controlled firefighting robot (Doctoral dissertation, Busitema University.).
[19] Chaki, S., Nandi, D. and Das, J., 2021. Fire extinguishing robot using arduino and DTMF controller. In Advances in Smart Communication Technology and Information Processing: OPTRONIX 2020 (pp. 425–432). Springer Singapore.
[20] Murad, A., Bayat, O. and Marhoon, H.M., 2021. Implementation of rover tank firefighting robot for closed areas based on arduino microcontroller.
[21] Dauda, M.S. and Toro, U.S., 2020. Arduino based fire detection and control system. International Journal of Engineering Applied Sciences and Technology, 4(11), pp. 447–453.
Biographies

Arghya Ghosh received the Bachelor’s degree in Computer Science and Engineering from Kalinga Institute of Industrial Technology (KIIT) University in 2023. He is actively involved in robotics, embedded systems, and automation research, with multiple publications in ICACIS 2024 (Springer) and IEEE conferences. His projects include a Cost-Efficient Mini CNC Machine and a Dual-Axis Solar Tracker, focusing on developing innovative and budget-friendly solutions. He is engaged in robotic security and open-source automation research, aiming to enhance the efficiency and safety of intelligent robotic systems. His passion for hardware-software integration drives him to explore cutting-edge advancements in robotics, automation, and AI-driven intelligent systems for real-world applications.

Shobham Guha received the Bachelor’s degree in Computer Applications from Kalinga Institute of Industrial Technology (KIIT) University in 2022 and the Master’s degree in Computer Applications from KIIT University in 2024. He is currently pursuing a Master of Technology in Computer Science and Engineering (2024–2026) from KIIT University and a Minor in Artificial Intelligence (2025–2026) from IIT Ropar. He is currently working in the Robotics Lab and AI Lab at KIIT University, where his research focuses on Robotics and Artificial Intelligence. He has multiple publications in ICACIS 2024 (Springer) and IEEE conferences, contributing to projects such as a Cost-Efficient Mini CNC Machine and a Dual-Axis Solar Tracker. His interests include robotic automation, AI-driven robotics, and intelligent systems, aiming to advance research in robotics, AI, and embedded automation.

Kamakhya Narain Singh received the MCA’s degree from Hyderabad Central University in 2007, M.Tech in CSE from JNTU Hyderabad in 2014, and PhD in CS & IT from MSCB University, Baripada, respectively. He is currently working as an Assistant Professor at the School of Computer Applications, KIIT Deemed to be University, Bhubaneswar. He has began his career in software industry as a Software Engineer in 2007 in Sofmen Technology, Indore. In 2009, joined as a Lecturer in College of Engineering, Bhubaneswar and taught Core Java, Data Structures and Advanced Java to B.Tech and MCA students. He also taught Advanced Java to M.Tech Students in Sambalpur University as Guest Faculty in 2009. In 2013, joined in SCA, Kalinga Institute of Industrial Technology, Bhubaneswar as Assistant Professor-I. His research areas include machine learning, deep learning, and IoT. He has published many papers in reputed international conferences/Journals/Book chapters. With a lifetime membership of Indian Society for Technical Education, he is a D-LINK Certified trainer on DCT Switching and qualified UGC NET also. He is a author of a text book entitled “A Text Book on Advanced Java” with SCITECH PUBLICATIONS. He is a being serving as a reviewer for many highly-reputed journals.

Chinmaya Misra is a Life Member of the Indian Science Congress. He is the Associate Professor in the School Of Computer Applications, KIIT Deem to be University, Bhubaneswar, India. He is working in Energy Saving Mechanism in WiMaX and Image Processing and Queuing System, Cloud Computing and Social Networking. He has completed his MCA from North Bengal University in 1999 and received his MS degree from School of Information Technology, IIT Kharagpur in [2008]. He completed his PhD from KIIT Deemed to be University from School of Computer Science and Enginneringin in [2014]. In [1999] he started his professional career as [Programming Assistant] in IIT Kharagpur and joined as lecturer in KIIT Deemed to be university as [Lecturer] in 2008. He has published many research works in reputed journals and conferences.

Anupam Samui is working as an Asst. Prof. in the School of Electronics Engg, KIIT DU. He is working in energy saving methods in SDN. He is currently pursuing his PhD.

Arijit Dutta is an Assistant Professor in the Department of Computer Science and Engineering at Symbiosis Institute of Technology, Symbiosis International University, Lavale Pune. He brings a unique blend of industry experience and academic rigor to his role. Prior to joining Symbiosis, he served as a Learning & Development Senior Analyst, contributing to organizational growth at companies such as KPIT Pune, High Radius Corporation, and Reliance Industries Ltd. He also served as an Assistant Professor at Sri Balaji University, Pune. He is currently pursuing a Ph.D. in Computer Science and Engineering and holds a UGC NET qualification. He earned a Master of Technology (M.Tech.) in Computer Science and Engineering, a Master of Computer Applications (MCA), and a Bachelor of Computer Applications (BCA). His research interests include 5G technology, cloud computing, data security, the Internet of Things (IoT), and machine learning.
Journal of Mobile Multimedia, Vol. 21_3&4, 599–618.
doi: 10.13052/jmm1550-4646.213415
© 2025 River Publishers