Multiple Measurement Vector-based Sparse Bayesian Learning Channel Estimation for Efficient D2D Discovery and Pairing
Iqra Javid* and Sibaram Khara
Department of Electrical, Electronics & Communication Engineering, Sharda University, Greater Noida, UP 201310, India
E-mail: iqra.javid@sharda.ac.in; Sibaram.khara@sharda.ac.in
*Corresponding Author
Received 08 January 2025; Accepted 01 May 2025
Abstract
Device-to-Device (D2D) communication in next-generation networks enables the creation of localized networks by directly connecting nearby devices, reducing base station traffic and enhancing spectral efficiency through frequency reuse. This work developed multiple measurement vector-based compressed sensing problem for the D2D system, where the composite multiple measurement vector (MMV) D2D channel is low-rank and exhibits common sparsity across multiple measurements. To exploit this common sparsity channel structure, we propose the MMV-based sparse Bayesian learning (MSBL) algorithm that achieves precise channel estimation by leveraging common sparsity. These estimates are then utilized to calculate the achievable rates for scheduling decisions for both cellular users and D2D links. Simulation results demonstrate the efficacy of the proposed MSBL method in improving rate predictions and scheduling accuracy in dense D2D networks.
Keywords: Device to Device (D2D), multiple measurement vector, sparse Bayesian learning, scheduling, rate predictions.
1 Introduction
Device-to-Device (D2D) communication is a transformative technology that plays a critical role in next-generation wireless networks, including 5G and beyond. With the exponential growth in connected devices, D2D communication enables direct communication between nearby devices, bypassing the base station (BS) and thereby reducing network traffic and latency [1, 2]. By leveraging licensed spectrum, D2D communication facilitates enhanced spectral efficiency through frequency reuse and supports emerging applications such as location-based services and edge computing [3, 4].
The primary advantages of D2D communication stem from proximity gains, spectral reuse, and reduced transmission hops, which collectively improve network performance [5]. However, these benefits are accompanied by significant challenges, particularly interference management between D2D and cellular users. Existing works have proposed various interference mitigation techniques, such as power control and mode selection strategies, to optimize system performance [6]. Moreover, the adoption of network-assisted D2D communication has shifted the focus towards efficient spectrum utilization, reliability, and quality-of-service (QoS) guarantees.
Despite these advancements, most prior studies assume full channel state information (CSI) availability at transmitters, an assumption that may not hold in practical scenarios [7, 8, 9]. Furthermore, the sparse nature of D2D channels, characterized by a low-rank composite structure with only a few dominant coefficients, has largely been underexplored. Exploiting this sparsity in the D2D wireless channel can lead to substantial improvements in channel estimation accuracy. The authors in [10] proposed a protocol that allows the network controller to estimate achievable rates using compressed non-adaptive measurements. However, this method relies on continuous feedback, which can accumulate errors in the estimation and result in inaccuracies. Efficient channel estimation in such scenarios is crucial for accurate rate prediction and resource allocation. Traditional compressed sensing algorithms, such as orthogonal matching pursuit (OMP) and sparse Bayesian learning (SBL), have demonstrated their effectiveness in estimating sparse channels in cellular networks [11, 12]. However, despite their effectiveness in cellular systems, these sparsity-based algorithms have not yet been applied in D2D communication to effectively estimate the sparse D2D channel.
To overcome these limitations, this paper introduces a novel framework that utilizes the multiple measurement vector (MMV) sparse Bayesian learning (MSBL) algorithm. Unlike single measurement approaches, MSBL simultaneously processes multiple received signals to estimate the sparse composite D2D channel, exploiting the common sparsity across these measurements. This results in significant reductions in both estimation errors and computational complexity.
The main contributions of this paper are summarized as follows:
• We first formulated an MMV-based compressed sensing problem for the D2D system, where the MMV channel exhibits common sparsity across the measurements. To effectively capture this shared sparsity, this letter proposes an MSBL-based algorithm, which defines a Gaussian prior with a common hyperparameter for all entries in each row of the MMV channel, ensuring consistent sparsity across the measurements.
• Using the estimated channel, we develop a framework for achievable rate prediction, enabling efficient D2D discovery, and pairing between cellular users and D2D links.
• Through extensive simulations, we demonstrate the superior performance of the proposed MSBL algorithm compared to conventional methods such as OMP and conventional SBL. The results highlight significant improvements in channel estimation accuracy, achievable rates, and system performance. Furthermore, the proposed approach achieves near-oracle performance in terms of normalized mean-squared error (NMSE).
2 System Model
Consider a cellular network, as shown in Fig. 1, with a BS managed by a central network controller. The network comprises transmitters communicating with receivers over wireless channels. Cellular users refer to links between devices and the BS, while D2D links connect two wireless devices directly. Let represent the set of transmitters and receivers, with denoting cellular users and identifying potential D2D users. We assume the presence of D2D links in the network.
The channel from transmitter to receiver on a resource block is represented by the channel coefficient , which is a realization of a stochastic process. All resource blocks are assumed to be statistically equivalent and independent. User may experience interference from other users , . The performance of user depends on the vector of channel coefficients from all transmitters to receiver . These vectors form the channel matrix . Since not all D2D users communicate simultaneously, many channel coefficients are zero, making the composite channel matrix sparse.
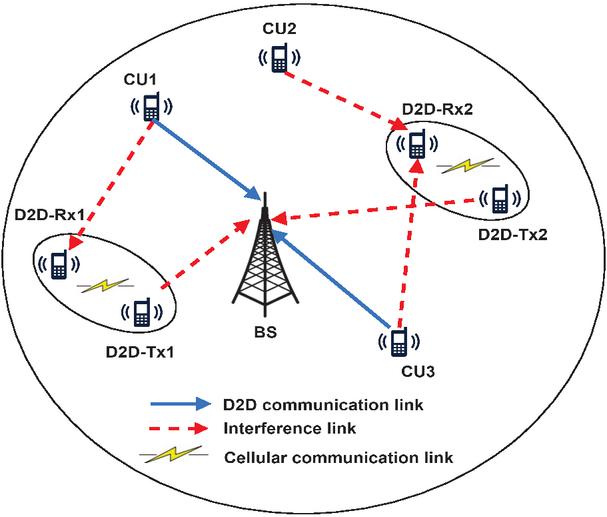
Figure 1 D2D communication network with cellular/D2D users (CU: cellular user, D2D-Tx: D2D transmitter, D2D-Rx: D2D receiver).
Consider as the set of users with active links. The signal received by receiver is given by
| (1) |
The complex data symbol transmitted by node is denoted as , and the additive noise at receiver is represented by . The transmitted data symbols are assumed to be independent and identically distributed (i.i.d.) random variables with and , where the transmit power of user is considered fixed, without power control. When user is scheduled for transmission, its achievable rate is assumed to be
| (2) |
The Signal-to-Interference-plus-Noise Ratio (SINR) of receiver is defined as the ratio of the desired signal power to the sum of the interference and noise power and is given by
| (3) |
Remark 1 For QoS considerations, it is assumed that each receiver has a specified rate requirement denoted as . Given a complete channel matrix , we, therefore, define a scheduling decision as feasible if it meets two criteria: Firstly, , and secondly, , . The D2D users are scheduled to be paired with the transmissions in by the network controller only if i) D2D users are in proximity to each other, and ii) the scheduling decision is feasible as defined above.
2.1 MMV-based compressed sensing problem formulation
We consider a D2D communication network, where all transmitters simultaneously transmit pilot signals. Let denote the pilot signals sent by transmitter , which is the th column of the pilot or measurement matrix denoted by . Without the loss of generality, during pilot transmission, the vector of all signals received by receiver can be formulated as a sparse channel estimation problem as:
| (4) |
where denotes the additive noise vector with elements . Given that among the total channel coefficients, only a subset are non-zero, the channel vector is inherently sparse. To develop the multiple measurement vector-based channel estimation model, we take received signal vectors for measurements. This is achieved by stacking all the received vectors using a common pilot matrix . The MMV model for D2D channel estimation can be cast as
| (5) |
where the noise matrix , with as the noise sample for the th measurement. The channel matrix . Since, each column vector is sparse. Consequently, most channel coefficients in the channel matrix are insignificant or zero, resulting in being sparse. We next discuss the sparsity structure of .
Remark 2 Note that columns of have the identical sparsity profile, which leads to simultaneous sparse structure, i.e., common sparsity across columns of . To leverage this common sparsity structure, we develop MMV-based MSBL algorithm to enhance the channel estimation performance.
3 MMV-based Sparse Channel Estimation
In Bayesian inference, the MSBL algorithm uses a Gaussian distribution with parameterized hyperparameters as the prior distribution for the solution [12]. The algorithm iteratively refines these hyperparameters using the Expectation-Maximization (EM) approach. In this context, we focus on applying the MSBL method to solve the sparse channel estimation problem. The MSBL method leverages the inherent sparsity of the channel matrix , providing superior recovery performance compared to conventional SBL method.
The MSBL-based channel estimation assigns the following Gaussian prior to the channel :
| (6) |
where denotes the hyperparameter associated with the th component of the D2D channel vector , and is the unknown hyperparameter vector, . Since, we place the same hyperparameter (independent of the index ) on each channel , the prior in (6) captures the common sparsity in . Now, following the conventional SBL, we use a Gamma hyperprior over the local precision hyperparameter as:
| (7) |
Here, is the Gamma function, with and being its parameters. This Gaussian-Gamma hierarchical prior makes the estimation problem tractable [12], and also helps in capturing the sparsity more efficiently since the overall prior on is a Student-t distribution with a sharp peak at zero [12].
We now develop the SBL framework to recover sparse channel . Assume that the noise vector in (4) follows Gaussian distribution, i.e., , the likelihood distribution is given by
| (8) |
Following the Bayes’ rule, the posterior distribution of is given by
| (9) |
Using the Gaussian prior in (6) and the likelihood distribution in (8), the posterior distribution of the sparse channel is also Gaussian, and is given by
| (10) |
where MMSE estimate and the Error Covariance matrix of are given by [12]
| (11) | |
| (12) |
To obtain the posterior mean from (11) and (12), the hyperparameter vector needs to be estimated. We choose the hyperparameter vector such that it maximizes the posterior likelihood , leading to an intractable non-concave optimization problem [12]. Thus, we employ expectation maximization (EM) algorithm to maximize the cost function iteratively. Let denote the hyperparameter update in the th EM iteration, where . Given a previous hyperparameter , , the hyperparameter update , which maximizes the conditional expectation of the log-likelihood function , and the covariance matrix is given by
| (13) |
where denotes the th entry of the posterior mean matrix and denotes the th diagonal entry of the covariance matrix . The above EM steps are repeated untill the EM algorithm converges. The stopping criterion is decided either by the maximum number of iteratiomns to converge or by a condition , whichever is achieved earlier. The stopping threshold and are chosen suitably. After the EM algorithm converges, the SBL-based sparse channel estimate is obtained as the converged a-posteriori mean, i.e., . The estimate of the channel coefficient is the a-posteriori mean in the th EM iteration. The above MSBL algorithm is summarized in Algorithm 1. Step 3 calculates the covariance matrix and the mean in the th EM iteration using (12) and (11), respectively. Step 4 updates the and using (13) to compute mean and the covariance, calculated in step 3. Step 6 computes the estimated rate using the estimated channel coefficients , , in (3).
Algorithm 1 MSBL-based rate estimation algorithm for the D2D discovery and pairing decisions.
Input: , , ,
Output: ,
1 Initialization: , . while do
2 Calculate and in the th EM iteration using (12) and (11), respectively;
3 Update the hyperparameters using (13);
4 ;
5
6 end while
7 Calculate estimated rate as in (14), where the estimate . 8 Perform D2D discovery and pairing using (16) and (17), respectively. return: in (11), .
4 Computational Complexity
We now show in Table 1 the per iteration complexity of each step of the proposed MSBL, SBL and OMP algorithms. For the proposed MSBL, using the Woodbury identity
the complexity of calculating in (12) is reduced from to , where is the number of measurement vectors. The Algorithm 2 complexity is dominated by the E-step, i.e., Step-3, which calculates and with complexities of and , respectively. Thus, the overall complexity of the proposed MSBL is , where is the maximum number of EM iterations required for convergence. For SBL, the complexity per iteration is lower as it processes a single measurement vector. The covariance matrix is calculated with a complexity of , and the mean vector is computed with a complexity of . Thus, the overall complexity of SBL is . The proposed MSBL and SBL has slightly higher complexity than OMP, which has a complexity of , where denotes the sparsity level. Designing a low-complexity version of the proposed MSBL to further reduce the complexity associated with matrix inversion is a promising future direction.
Table 1 Per iteration complexity of the algorithms
| Algorithm | Operation | Complexity |
| MSBL | (Woodbury identity) | |
| calculation | ||
| Total complexity | ||
| SBL | (Woodbury identity) | |
| calculation | ||
| Total complexity | ||
| OMP | Total complexity |
5 Rate Estimation With Imperfect CSI
This section first computes the estimated achievable rates for all scheduling decisions with the imperfect CSI and then performs D2D discovery and pairing given this estimated rate. With the estimated sparse channel and a specified scheduling decision , the estimated achievable rate for user is expressed as follows:
| (14) |
Thus, given a channel realization and its estimate , the rate gap (i.e., rate discrepancy) for user is dependent on the scheduling decision , and is given by
| (15) |
Here, the achievable rate is given by (2). Note that rate gap of user in an interference-free scenario acts as a basis for D2D discovery. We now perform the D2D discovery and pairing as follows.
5.1 D2D Discovery and Pairing
To establish a D2D communication, we need D2D user discovery, which refers to a process of identifying D2D candidates from all potential D2D users, and their pairing.
With the sparse channel estimate , the network controller upper bound the rate gap such that for some . This implies that proximity condition so that . As a result of this, the set of device pairs that are in proximity (discoverable), and hence form D2D candidates, are given by
| (16) |
Thus, with the upper bound rate gap , the network controller reliably identifies the D2D pairs that are discoverable. From (16), it follows that if the threshold , implying that all the potential D2D users are discoverable and form D2d candidates.
Now, with the set of D2D pairs that are in proximity for some , and the sparse channel estimate , the optimal scheduling decision , where is a solution to the following problem
| (17a) | ||
| (17b) |
Here, the MSBL-based rate is given by (14).
6 Simulation Results
In this section, we present simulation results to validate the efficacy of our proposed sparse Bayesian learning (SBL) and modified sparse Bayesian learning (MSBL) methods for channel estimation and rate evaluation in device-to-device (D2D) communication systems. The simulation parameters are as follows, unless specified otherwise: we consider a cellular setup with one BS and 25 users, each equipped with a single antenna. The number of measurements is set to , and the baseband channels of the user-user links are modeled as Rician fading channels with a Rician factor . The normalized mean square error (NMSE) is used as the performance metric and is defined as: , where represents the true channel and denotes its estimate.
In Fig. 2(a), we compare the NMSE performance of the proposed SBL and MSBL algorithms with existing sparse channel estimation techniques such as OMP, MMSE, and compressed sensing (CS) from [9]. Additionally, the oracle MMSE is included as a benchmark, assuming perfect knowledge of the channel support. Both SBL and MSBL exhibit significant NMSE improvements compared to OMP, CS, and MMSE. The superior performance of SBL and MSBL is attributed to their ability to exploit the sparse structure of the D2D channel more effectively. In particular, MSBL captures the common sparsity across multiple measurements, leading to a further reduction in estimation error compared to SBL.
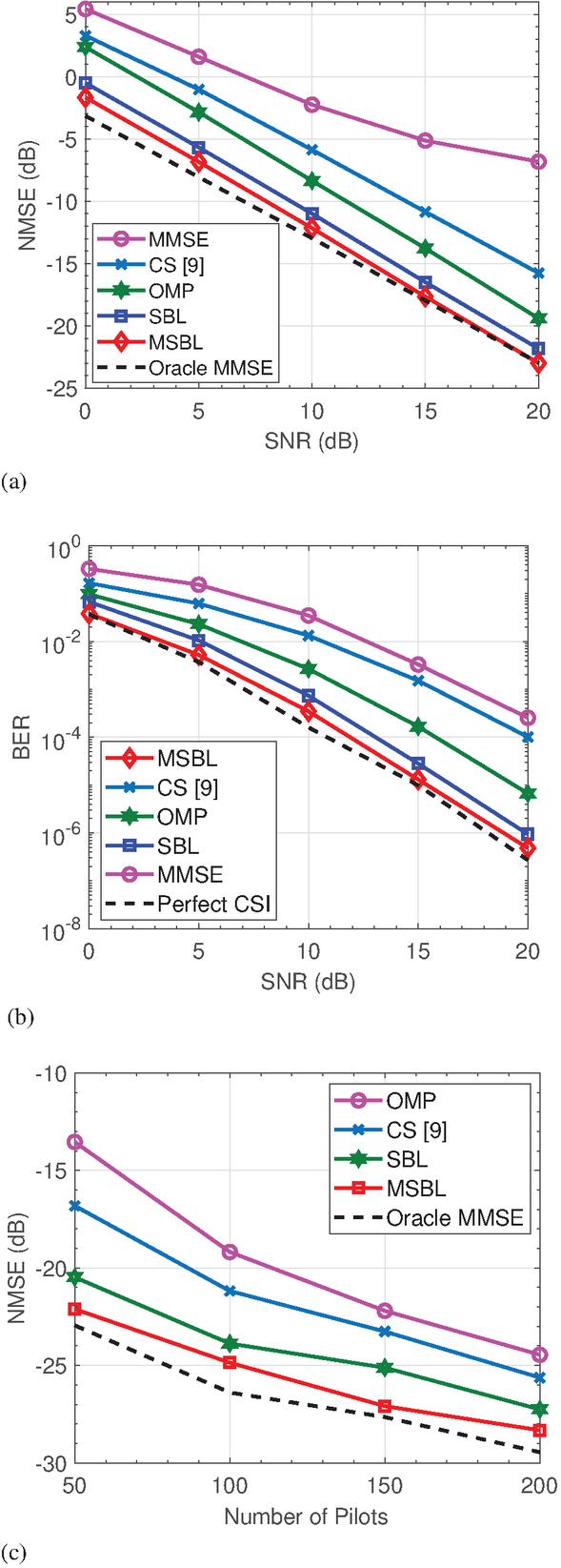
Figure 2 Comparison of NMSE and BER for the proposed MSBL and existing algorithms: (a) NMSE comparison at varying SNR, (b) BER comparison at varying SNR, and (c) NMSE performance by varying the number of pilots.
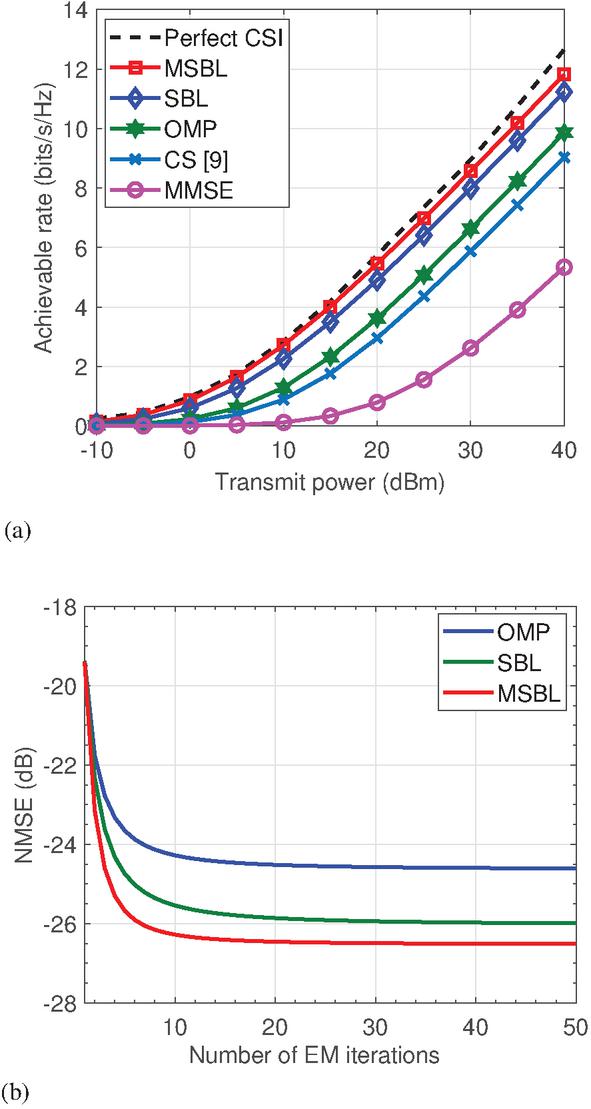
Figure 3 (a) Achievable rate per D2D pair with imperfect CSI, and (b) NMSE versus iterations for the proposed MSBL, SBL, and OMP algorithms at dB.
We compare in Fig. 2(b), the BER of the MSBL algorithm with existing ones by varying the SNR. We see that the BER behavior mimics that of NMSE. The MSBL algorithm has the lowest BER, which is close to that with perfect CSI, which uses the perfect knowledge of the channel. This is due to the fact that the sparse prior in SBL captures the D2D channel sparsity more accurately. The poor performance of OMP algorithm is because it is a greedy sparse recovery algorithm and is sensitive to noise, which degrades its NMSE. It also relies on prior knowledge of the sparsity level of the unknown channel, which is difficult to acquire in practice, which degrades its NMSE. The MMSE approach provides a sub-optimal solution and fails to fully exploit the sparsity inherent in the D2D wireless channel, consequently resulting in inferior estimation performance and hence the BER performance. Similarly, the lower NMSE with CS in [9] can be attributed to the use of a compressed non adaptive channel estimation scheme. This approach relies on continuous feedback, which can lead to the accumulation of errors in estimation over time, thereby degrading the NMSE performance.
In Fig. 2(c), the NMSE performance versus pilot length is depicted. Both SBL and MSBL outperform other methods across all pilot lengths, with MSBL showing a notable advantage due to its ability to capture the common sparsity in . This demonstrates for the same NMSE performance, we need less number of pilots with MSBL than the existing methods, thereby reducing the pilot overhead.
Fig. 3(a) presents the achievable rate of each D2D pair using perfect CSI and estimated CSI. The achievable rate with MSBL aligns closely with that of perfect CSI, demonstrating the high accuracy of these estimation techniques. Notably, the achievable rate of the proposed MSBL outperforms SBL, OMP, CS, and MMSE, emphasizing the benefits of multiple measurement model in MSBL.
Finally, the convergence behavior of SBL, MSBL, and OMP is illustrated in Fig. 3(b). The SBL algorithm converges within approximately 20 iterations. However, MSBL achieves a similar NMSE with fewer iterations due to its ability to exploit the common sparsity structure inherent in multiple measurement vectors (MMV). By jointly processing these multiple measurements, MSBL efficiently models the shared sparse support across all vectors, leading to faster convergence compared to SBL, which processes each measurement independently. In contrast, OMP requires around 40 iterations to converge due to its sequential and suboptimal selection of sparse supports.
7 Conclusion
This paper addresses scheduling and D2D device pairing by developing the D2D received signal as an MMV-based compressed sensing framework. This MMV model leads to the common sparsity in D2D channel across multiple measurements. To effectively capture this common sparsity, this work proposed an MSBL-based algorithm, which defines a Gaussian prior with a common hyperparameter for all entries within each row of the MMV channel, ensuring common sparsity across the measurements. The improved estimation performance enabled precise achievable rate prediction, supporting efficient D2D discovery and pairing. Simulation results confirm the MMV-SBL method’s superiority in CSI accuracy and rate prediction over existing approaches.
Biographies
[1] S. Feng, X. Lu, K. Zhu, D. Niyato, and P. Wang. Covert D2D Communication Underlaying Cellular Network: A System-Level Security Perspective. IEEE Transactions on Communications, 23(8):9518–9533, 2024.
[2] X. Hu, Y. Yi, K. Li, H. Zhang, and C. Kai. Secure Transmission Design for Virtual Antenna Array-Aided Device-to-Device Multicast Communications. IEEE Journal on Communications, 22(7):4814–4827, 2023.
[3] H. Pan, Y. Liu, G. Sun, P. Wang, and C. Yuen. Resource Scheduling for UAVs-Aided D2D Networks: A Multi-Objective Optimization Approach. IEEE Journal on Wireless Communications, 23(5):4691–4708, 2024.
[4] K. Doppler, M. Rinne, C. Wijting, C.B. Ribeiro, and K. Hugl. Device-to-device communication as an underlay to LTE-advanced networks. IEEE Communications Magazine, 47(12):42–49, 2009.
[5] M. Jung, K. Hwang, and S. Choi. Joint mode selection and power allocation scheme for power-efficient device-to-device (D2D) communication. In IEEE 75th Vehicular Technology Conference (VTC Spring), pp. 1–5, 2012.
[6] N. Jindal and A. Goldsmith. Dirty-paper coding versus TDMA for MIMO broadcast channels. IEEE Transactions on Information Theory, 51(5):1783–1794, 2005.
[7] H. Tang, C. Zhu, and Z. Ding. Cooperative MIMO precoding for D2D underlay in cellular networks. In IEEE International Conference on Communications (ICC), pp. 5517–5521, 2013.
[8] X. Lin, R.W. Heath, and J.G. Andrews. The interplay between massive MIMO and underlaid D2D networking. IEEE Journal on Wireless Communications, 14(6):3337–3351, 2015.
[9] J. Schreck, P. Jung, and S. Stanczak. Compressive rate estimation with applications to device-to-device communications. IEEE Journal on Communications, 17(10):7001–7012, 2018.
[10] T.T. Cai and A. Zhang. Sparse representation of a polytope and recovery of sparse signals and low-rank matrices. IEEE Transactions on Information Theory, 60(1):122–132, 2013.
[11] G.Z. Karabulut and A. Yongacoglu. Sparse channel estimation using orthogonal matching pursuit algorithm. In IEEE 60th Vehicular Technology Conference (VTC Fall), vol. 6, pp. 3880–3884, 2004.
[12] M.E. Tipping. Sparse Bayesian learning and the relevance vector machine. Journal of Machine Learning Research, 1:211–244, 2001.
Biographies

Iqra Javid is currently pursuing her Ph.D. in wireless Communication from Sharda University, India. She has obtained her M.Tech in Digital Communication from Sharda University, India and her B.E in the department of Electronics and Communication Engineering from SSM College of Engineering and Technology Pattan, Jammu and Kashmir, India . Her research interest includes wireless networks, device to device communications, Machine learning.

Sibaram khara received his Ph. D. in engineering from Jadavpur University, Kolkata, in next-generation wireless heterogeneous network-essentially in the area of interworking network and protocol convergence techniques for cellular and WiFi integrated networks. He did PG in Digital Systems from National Institute of Technology, Allahabad. He received Best Paper awards for his analytical model of Cellular/WiFi system (IEEE ADCOM 2008 MIT Chennai and IEEE EWT 2004 (1st), I2IT Pune (3rd)). He was honored as best Research Faculty in the School of Electronics Engineering, VIT University, Vellore, India for year 2010. His research articles are presented at seminars and conferences in many countries, namely, WEAS02 Athens, IEEE VTC06 Melbourne, IEEE PWC07 Prague, IEEE/ACM SAC10 Switzerland, etc. His major research interests cover the areas of cluster based wireless sensor networks, spectrum mobility in cognitive radio system, call admission control in heterogeneous network and carrier aggregation in LTE-A technology.
Journal of Mobile Multimedia, Vol. 21_3&4, 767–782.
doi: 10.13052/jmm1550-4646.213424
© 2025 River Publishers