An IoT-based System with Machine Learning for Detecting Drowsiness of Drivers
Sayon Karmakar* and Seshadri Mohan
Department of Systems Engineering, University of Arkansas at Little Rock, Arkansas, USA
E-mail: karmakar.sayon@gmail.com; sxmohan@ualr.edu
*Corresponding Author
Received 18 September 2020; Accepted 30 November 2020; Publication 26 January 2021
Abstract
Drowsiness is feeling abnormally sleepy or tired. Driving is a complex psychomotor skill. Fatality rates rise as driver becomes drowsy. NHTSA accounted 91,000 motor vehicle crashes have occurred due to drowsy driving till 2017 and drowsy drivers cause 17% accidents with fatality. The IoT technology offers unprecedented opportunities to interconnect human beings as well as facilitate Machine-to-Machine (M2M) communication. The sensors and network allow all things to communicate directly with each other to share information and allow us to have an instrumented system where accurate data is readily available to make an informed optimal decision. This paper presents one such practical system for detecting drowsiness of drivers. Consequently, a system such as the one presented here can be of immense applicability in reducing the fatality rate due to traffic accidents. Usually, IoT applications, such as the one presented here, collect enormous quantity of data from the sensors and extract some sensible output, possibly using a pattern recognition algorithm. This is where Machine Learning, a branch of study under artificial intelligence, is employed. This paper presents the implementation of a system for detecting when a driver feels drowsy and sound an alarm to alert and discusses the machine learning approach adopted and the use of cloud for processing data.
Keywords: Drowsiness, machine-to-machine communication, machine learning, pattern recognition, drowsiness, internet of things.
1 Introduction
A drowsy driver operates a vehicle with reduced efficiency and thereby increases the risk of fatal accidents. Drowsiness is feeling abnormally sleepy or tired [1]. Driving is a complex psychomotor skill [2]. 17% fatal accidents are caused by drowsy drivers [3]. The extent to which a driver is drowsy can be evaluated by three methods – vehicle-based, behavioural and physiological responses [4]. Human body exhibits some prominent physiological reactions while feeling drowsy. These can be monitored using any of the non-image based methods such as Electrocardiogram (ECG), Electrooculogram (EOG), Electroencephalogram (EEG), Electromyogram (EMG) and Photoplethysymography (PPG) [5]. Heartbeat rate changes when one is drowsy and can be sensed using ECG. The biofeedback signal generated from the potential of electric field between cornea and retina is analysed is EOG. EEG records brain waves, which can be searched for patterns induced by drowsiness. PPG is the measure of changes in the vasomotor tone in the extremities. Transducers have been implemented that successfully detect drowsiness. Some image processing based drowsiness detection schemes measure the blinking frequency and detect the yawning of a driver. Infrared Light photodetector, mounted onto wearable glasses, are also used as a non-image based system to detect blinking using specially fabricated IR receivers having a bandwidth of approximately 80 nm [6]. The system functions accurate only if it is mounted onto spectacles. But, at a commercial level, these systems do not function well as they obstruct the drivers’ vision. Automobile makers such as Ford, Toyota, Volvo, Mercedes-Benz and Volkswagen have their own system to alert the driver when feeling drowsy. The system comprises of camera and sensors mounted on the steering column. Every company had loopholes in their system where external noise could trigger a false alarm. The noise could be a bump along the road that triggers the system. We propose a robust system with reduced cost and increased efficiency. The system is a combination of two vital sensors – Camera and Accelerometer.
2 Ground Reality of Drowsy Driving
This section lists a number of statistics about drowsiness as documented by the various safety boards and suggests precautionary measures. Several safety and transportation-related administrations in the United States of America established the fatal nature of drowsiness in drivers.
National Highway Transport Safety Administration (NHTSA) reported that drivers’ fatigue could have costly effects on safety, health and quality of life and had resulted in 795 deaths in 2017 and 91,000 motor vehicle crashes until 2017. The report also suggests a few suggestions on avoiding such fatal accidents which include the tracking of sleep hygiene. Strategic planning named Drowsy Driving and Research Program Plan has been enforced in 2016 with broader focus on the measurement and problem identification, awareness and education, policy development, high-risk populations, vehicle technology and infrastructure [7].
Center for Disease Control & Prevention (CDC) reports that drowsiness is not only caused by inadequate sleep, but also by untreated sleep disorders, medications, drinking alcohol or work shifts. Morbidity and Mortality Weekly Report in 2013 showed the dominant features due to drowsiness are slower reaction time, reduced attentiveness and inability to take appropriate decisions. Signs of drowsy drivers include frequent blinking, yawning, drifting from lane, missing a lane and hitting the rumble strip on the side of road. Morbidity and Mortality Weekly Report in 2014 showed that those sleeping for less than 6 hours or snoring while sleeping were likely to fell drowsy and fall asleep while driving. Drowsiness in drivers plays a substantial role in motor vehicle crashes [8–10].
Food & Drug Administration (FDA) in a report of 2018 stated that medications affect a driver’s ability to drive safely. The medications products which have shown such effects are prescription drugs for anxiety, some antidepressants, some cold remedies and allergy product, sleeping pills, and pain killers. More medication consumption increases the chance of affecting a driver’s driving ability. The general side effects are sleepiness, blurred vision or fainting [11, 12].
Federal Highway Administration (FHWA) published that encountering rumble strips while driving serves as a wake-up call for drowsy drivers. The run-off-road (ROR) crashes account for one third of all traffic fatalities nationwide and two thirds of all traffic fatalities in rural areas. Therefore, rumble strips beside the roads were implemented in an aim to reduce the ROR crashes in half. In the state of Utah, a safety analysis was carried out on fatigue and drowsy driving. A few countermeasures were recommended for the critical corridors and more reliable measures should be developed based on the further research and analysis of results from current deployed systems [13, 14].
Federal Motor Carrier Safety Administration (FMCSA) developed a questionnaire on the knowledge of the test taker on drowsy driver which is very essential for educating the drivers. The dynamics of the questions included impact on vehicle safety and human safety when sleep is avoided. The answers to questionnaire state the facts based on research conducted by many. The subjectivity of the answers are removed based on actual research. Their report published in 2015 documents tips on driving commercial motor vehicle focusing on the driver fatigue. It provides highlights on recognising the signals and dangers of drowsiness, avoiding medication that induce drowsiness, maintaining a healthy diet etc. [15, 16].
National Center on Sleep Disorders Research & Office of Prevention, Education & Control, an integral unit of NIH, convened a strategic development workshop on educating the youth about sleep and drowsy driving. It was focused on the youth in educating the importance of sleep, dangers of sleep deprivation and the dangers of drowsy driving. Awareness is the first step to handle any mishap, which was the motto of this workshop [17].
National Institute for Occupational Safety and Health (NIOSH) released a set of quick sleep tips for truck drivers. It highlighted the importance of sleep from a health perspective as well as ensuring safety. The sleep environment is also an essential factor since quality of sleep follows an inverse relation to fatigue. Some pre sleep preparation tips have also been suggested for proper and adequate sleep [18].
National Transportation Safety Board (NTSB) developed a safety forum Awake, Alert and Alive whose objective is to overcome the dangers of drowsy driving. It highlights the often overlooked problem of drowsy driving, its prevalence and its effect on non-commercial vehicle safety. Features of a safe driver are to be well awake and alert [19].
National Sleep Foundation raised the awareness by dedicating a week in the month of November as a Drowsy Driving Prevention Week. It focuses on the facts around Drowsy driving and trying to spread the importance of proper sleep as well as suggest countermeasures. Safety is a mutual responsibility where one’s wrong step leads to many unwanted collateral damages [20].
Statistics can mislead a research. Just because a sample suggests a trend, same cannot be always true about the entire population. The various administrations carried out their individual survey upon which this trend can be verified and relied upon. They laid such concrete foundations and resources to avoid fatal crashes. It highlights the fact that stressful life cannot be avoided due to high work output demand by employees in their workplaces. Despite its impact on fatality rate, drowsiness of drivers continues to be a threat to traffic safety. Therefore, there exists an urgent need to implement an active warning system in vehicles to detect the drowsiness level of the drivers and alert the drivers.
3 Literature Review
Researchers have explored drowsiness detection system extensively over the years [21] to [26]. Drowsiness can very easily be misunderstood as fatigue. While feeling tired corresponds to fatigue, finding it difficult to keep awake corresponds to drowsiness. The extent to which one is drowsy can be evaluated using three responses, namely – vehicle based, behavioural based and physiological response. Vehicle based drowsiness can be measured using metrics such as the rate of change of position of the vehicle within a lane, drastic movements of steering wheel, or uneven exertion of pressure on acceleration pedal. The deviation of these metrics from a threshold provides a measure of drowsiness. Appropriate features must be extracted out of the three signals generated by sensors. Techniques for feature extraction utilize many statistical approaches whose accuracy depends on the availability of large and accurate data sets.
Behavioural signs appear on the faces and in actions. They include nodding of head, yawning, closing of eyes for longer period and rapid blinking. Yawning is an involuntary behaviour characterized by wide opening of mouths. Many features are extracted like degree of mouth openness, histogram of oriented gradients (HOGs) and local binary patterns (LBPs) [27]. Systems based on behavioural signs detect both hand-covered and uncovered spontaneous yawns. By segregating the regions of a face into mouth region of interest and eye region of interest, one can facilitate a system to distinguish between yawning and speaking.
Physiological responses include activities from central nervous system, autonomous nervous system and neuromuscules. They include EEG, EOG and ECG, skin temperature, galvanic skin response and EMG respectively.
ECG signals give feedback upon key parameters that are very closely related to drowsiness. Heart rate, respiration rate and heart rate variability are amongst those parameters. A reduction of heart rate has been observed by many researchers. Respiration rate is the frequency of breathing. Unanimous observations are not available to suggest the trend but authors suggest a fall in the frequency. A widely used parameter, heart rate variability, calculates the variation in time interval between two consecutive heartbeats, also called R-R Interval. After many contradictions, research found that heart rate increases with physical work load, but heart rate variation decreases [28].
Humans behaviour and gestures play an important role in drowsiness estimation. Eye blink patterns are used in real time scenario to control the android device which suggests a good pattern recognition technique [29].
EEGs are closely associated with vigilance, sleep and cognition. Researchers have recommended classifying EEG signals into delta band, theta band, alpha band and beta band which prove to be prominently activated during drowsiness. Independent trails were conducted and concluded with increment in all band power. EOG signal measures the potential between cornea and retina. Parameters such as blink duration, blink frequency, blink amplitude, PERCLOS, delay of lid reopening and eye ball movement could be extracted with ease for drowsiness detection. These features are very distinguishable in themselves to detect drowsiness but it is infeasible to place sensors on drivers. EMG deals with muscle contraction, which shows a negative deviation in amplitude during fatigue. The disadvantage of this process is that it is complex and random in nature, which is subject to structural and biological properties of the muscle. The indications are prominent in nature with EEG being the most accurate. Results are promising but, at a commercial level, the feasibility is doubtful. Those sensors are intrusive and pose a threat of interference to drivers.
Processing of signals or responses for pattern recognition is the primary task of the system with accuracy and low latency, keeping the price low. The multi-modal system proposed here removes the dependency upon a single sensor and gathers a precise reading even if one component fails, thereby helps to prevent fatal accidents.
Accelerometer has the capability to track acceleration change and gyroscopic changes in three dimensions. The generated data can be processed to extract features about the motion. Researchers have formulated algorithms that can extract driver response pattern.
Cluster Analysis is one of the methods used to detect the driving performance using statistical parameters like standard deviation and mean of velocity and steering angle. It is also integrated with horizontal and vertical gaze location of eyes. Those driving responses are used to find the mental workload during typical driving scenarios. Hierarchical clustering is specifically used with extraction of change in variance in the cluster formed. It directly relates to the safety-first driving.
Recent studies correlated acceleration pattern to cognitive and physical health [30] of the drivers. The cause of variation is unclear between physical and cognitive health differences. Coefficient of variation (CoV) of acceleration and jerk signal are the key parameters. Further, various categorization has been done out of acceleration event into start velocity, change in velocity, final velocity and change in heading. CoV segregated the older drivers from stable healthy people and provide clinically relevant information. The information ranges from better cognitive and better physical to worse of each respectively.
Reference [31] implements Naïve Bayesian based classifier using statistical increment for detecting abnormal driving behavior, which includes sudden braking, lane-changing casually, quick turn, fast U-turn and long-time parking. The technique utilizes data from GPS, accelerometer, orientation and timestamp of android smartphone for above mentioned features extraction. The technique achieves a precision that is 3% more than that of Support Vector Machine (SVM), with the added advantage of reduced complexity. The net accuracy turns out to be 98.40%, which is much higher than that of SVM.
Roads may have obstructions or other temporary infrastructures possibly due to road construction, repair, accidents, or environmental factors. Designing algorithms for lane change detection under such practical situations may be difficult. Median strip or central reservation detection [32] algorithm has been used to detect the lane change, a classic example of image-based approach. Results are promising but at the cost of increased complexity.
Commercial sensors in vehicles can be aggregated with many systems to achieve accuracy. Intelligent Transport Systems suggest combinations of accelerometer, gyroscope and Global Positioning Systems (GPS) for Inertial Navigation Systems (INS) for determining vehicle’s position, orientation and velocity [33].
4 Proposed Method
The proposed method is a multi-modal system that combines the input from two kinds of sensors, non-image based and image-based. This reduces the error and makes the system highly reliable. It requires more processing power over the current commercial systems but the trade-off is worth the preliminary results obtained. Algorithm features multiple classifiers which is more reliable over single classifier. Its objective is to reduce the error and make the system robust. The classifiers used are combinations of Extra Tree Classifier, Random Forest, Logistic Regression, Stochastic Gradient Descent and Support Vector Classifier. Use of many classifiers makes the system error free and facilitates a meaningful classification of events using real time data from sensors. The accelerometer produces gyroscopic and acceleration data that are then fed into the model. Finally, fast dynamic time warping with combination of K-Nearest Neighbour is used as the principal classifier.
Tree classification for such prediction is introduced in the algorithm since the computational cost of generating and using the tree is very low. Consequently, the classification system can rapidly process data. Extra tree and random forest are very similar to each other in their operation but vary in two aspects – extra tree does not apply the bagging procedure to construct a set of training samples for each tree and selects a node randomly by assigning the variable index and variable splitting value randomly. Random tree prefers to search the best split. Overall, they reduce the computational complexity and increase the speed of processing. It is a non-parametric method that requires less data cleaning.
Logistic Regression uses a very well-known function called Sigmoid function that has range of 0 to 1 for a domain from to . It has an excellent squeezing property and facilitates accurate feature extraction from a large dataset with ease. This kind of regression has proven to be very efficient for multinomial cases where the probable outcomes are more than three.
Stochastic gradient descent is an iterative method of optimizing the objective function. Sample selection is carried out in shuffled manner to process out information from the likelihood function. This method is preferred for datasets that are rough and time varying signals. Sampling is carried out in small batches, which proves to be computationally faster despite requiring increased number of iterations.
Support Vector Classification is also introduced into the algorithm for its low memory requirement and effectiveness in high dimensional spaces. This method is very effective in classification than regression challenges. This classifier extracts an appropriate hyper-plane amongst the datasets.
Dynamic time warping (DTW) is the method of finding similarity between two time varying signals to extract features out of them. FastDTW is a recursive implementation of the DTW by a multilevel approach of coarsening, projection and refinement. A specific function has been dedicated for trimming of insignificant data. Therefore, the combined results are very appealing and accurate. The algorithm currently takes accelerometer data and finds out the instances using various statistical approach.
The problem arises when datasets were needed to tune the machine learning algorithm. Datasets were available for tuning the algorithm but not compatible to the one presented in the paper. Thus, scientific dataset generation session was carried out that was compatible as shown in Figure 1. Various events such as lane change, acceleration, deceleration, braking and U-turn were categorized and dataset for every event was generated and a sample event comprising various events was generated and tested.

Figure 1 Scientific experimentation for generation of training data set.
The image-based processing depends upon the eye aspect ratio (EAR). Camera provides video at 24 frames per second. It is converted into greyscale and then facial landmarks are detected. Out of those facial landmarks, the positions of the eyes are detected with specific points of interest as stated below. EAR is then calculated as per formula below. When the parameter EAR falls below a threshold value, it is indicative that eyes are closed and the duration of closure is calculated as shown in Figure 2. An audio-visual alert system is activated upon closure of eyes for a specified duration. This image-based system has been found to be very effective.
The overall algorithm collects data from the accelerometer in a matrix composed of three-dimensional accelerometric values as well as gyroscopic values sampled at the rate set by the sensor module and the data acquisition system. This data in real time is minimised with dimensionality reduction technique. It is then scaled such that the data does not mismatch with the domain of any of the five classifiers. The data is then used to estimate the type of movement in the vehicle that has been categorised earlier. The estimators used are logistic regression, vector support classifier, stochastic gradient descent classifier, extra tree classifier and random forest classifier. On each of the classifications, the highest mean score among them is used to infer the vehicular movement pattern. The eye aspect ratio, as explained above, is considered with the vehicular movement pattern to detect the level of drowsiness and accordingly activate the audio-visual alert unit. It thus satisfies the multimodal strategy of this system.
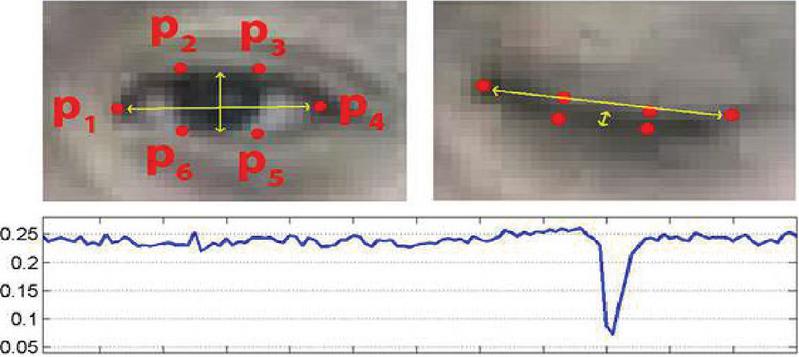
Figure 2 Graphical implementation of the image based algorithm to detect E.Y.E.
5 Results and Conclusion
The image-based system issues an alert whenever the intended ratio falls below a specific threshold. Figure 3 shows a snapshot of the system in operation in real time.
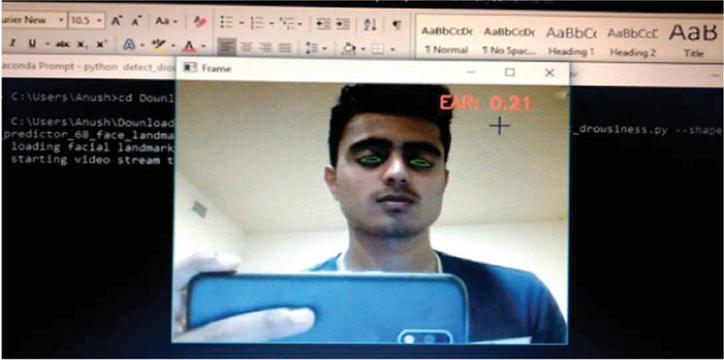
Figure 3 Real time operation.
The non-image based system was tuned using very limited datasets but the results were very promising giving the accuracy up to 58%.
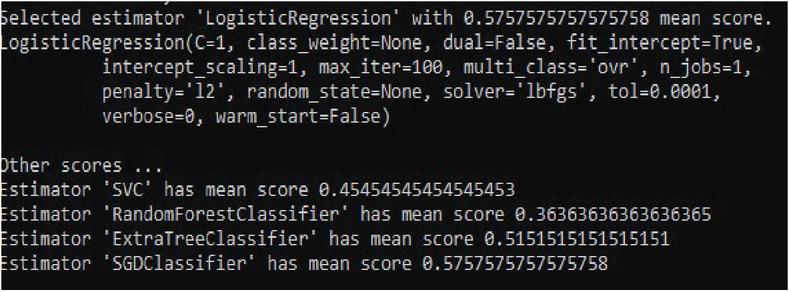
Figure 4 Real time classification.
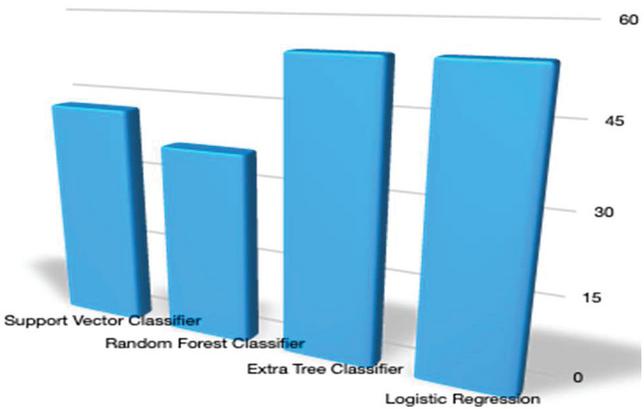
Figure 5 Classifier mean score.
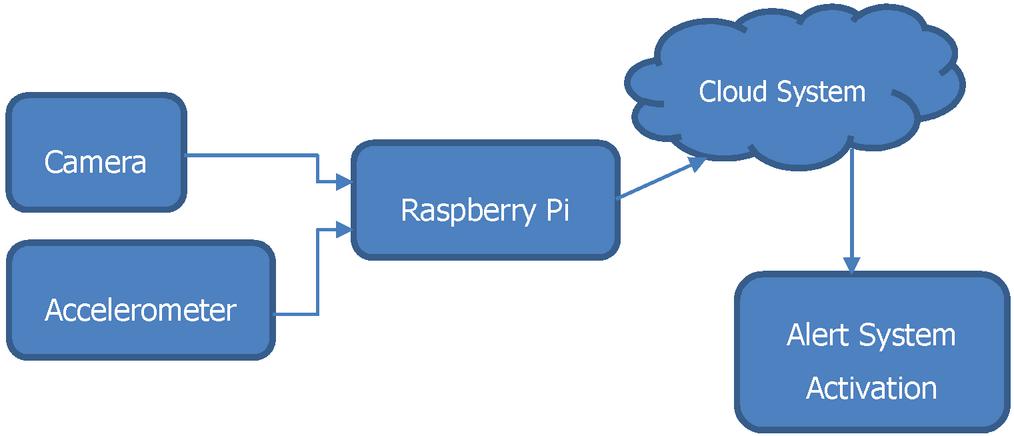
Figure 6 Model of the system.
Figures 4 and 5 shows the various mean scores of the various classifiers for a specific event. For a limited dataset, the outcomes of the classifiers are very promising. This paper discusses an on-board processing approach. The algorithm processing and decision making can be implemented in a cloud and the on-board system could directly send the instances to cloud. A brief model is shown in Figure 6. A cloud-based implementation can simultaneously reduce the computational burden on the low-powered sensors and processing units and increase prediction accuracy. Systems are available as per the requirement which include reduced network latency which is very essential in this system. A very extensive research about the architecture is essential with very deep understanding of the pros and cons of the system.
References
[1] “Drowsiness: Causes, Treatments, and Prevention.” https://www.healthline.com/health/drowsiness (accessed Jul. 06, 2020).
[2] J. Charlton et al., “Influence of chronic illness on crash involvement of motor vehicle drivers,” no. 300, p. 436p + appendices, 2004, [Online]. Available: http://www.monash.edu.au/muarc/reports/muarc213.pdf\%5Cnhttps://trid.trb.org/view/1158150
[3] “Drowsy Driving | NHTSA.” https://www.nhtsa.gov/risky-driving/drowsy-driving (accessed Jul. 06, 2020).
[4] A. Lemkaddem, R. Delgado-Gonzalo, E. Turetken, S. Dasen, V. Moser, C. Gressum, J. Sola, D. Ferrario and C. Verjus, “Multi-Modal driver drowsiness detection: A feasibility study” in IEEE EMBS International Conference on Biomedical & Health Informatics, 4–7 March, 2018, Las Vegas, Nevada, USA.
[5] A. Chowdhury, R. Shankaran, Manolya Kavakli and Md. Mokammel Haque, “Sensor Applications and Physiological Features in Drivers’ Drowsiness Detection: A Review” in IEEE Sensors Journal, Vol. 18, No. 8, April 15, 2018.
[6] Liang-Bi Chen, Wan-Jung Chang, Wei-Wun Hu, Chun-Kai Wang, Da-Huei Lee and Yu-Zung Chiou, “A Band-Pass IR Light Photodetector for Wearable Intelligent Glasses in a Drowsiness-Fatigue-Detection System” in 2018 IEEE International Conference on Consumer Electronics, 12–14 Jan, 2018, Las Vegas, Nevada, USA.
[7] “Drowsy Driving | NHTSA.” https://www.nhtsa.gov/risky-driving/drowsy-driving (accessed Jul. 06, 2020).
[8] “Drowsy Driving: Asleep at the Wheel | Features | CDC.” https://www.cdc.gov/features/dsdrowsydriving/ (accessed Jul. 06, 2020).
[9] “Drowsy Driving — 19 States and the District of Columbia, 2009–2010.” https://www.cdc.gov/mmwr/preview/mmwrhtml/mm6151a1.htm?s\_cid=mm6151a1\_w (accessed Jul. 06, 2020).
[10] “Drowsy Driving and Risk Behaviors — 10 States and Puerto Rico, 2011–2012.” https://www.cdc.gov/mmwr/preview/mmwrhtml/mm6326a1.htm?s\_cid=mm6326a1\_w (accessed Jul. 06, 2020).
[11] “Driving When Using Medicine | FDA.” https://www.fda.gov/drugs/ensuring-safe-use-medicine/driving-when-using-medicine (accessed Jul. 06, 2020).
[12] “Some Medicines and Driving Don’t Mix | FDA.” https://www.fda.gov/consumers/consumer-updates/some-medicines-and-driving-dont-mix (accessed Jul. 06, 2020).
[13] “Rumble Strips: A Wake-Up Call for Drowsy Drivers – September 1999 – FHWA-RD-99-107 – Focus | Federal Highway Administration.” https://www.fhwa.dot.gov/publications/focus/99sep/rumble.cfm (accessed Jul. 06, 2020).
[14] “A Safety Analysis of Fatigue and Drowsy Driving in the State of Utah,” 2007.
[15] “Drowsy Driving Quiz | FMCSA.” https://www.fmcsa.dot.gov/driver-safety/sleep-apnea/drowsy-driving-quiz (accessed Jul. 06, 2020).
[16] “CMV Driving Tips - Driver Fatigue | FMCSA.” https://www.fmcsa.dot.gov/safety/driver-safety/cmv-driving-tips-driver-fatigue (accessed Jul. 06, 2020).
[17] “Educating Youth about Sleep & Drowsy Driving.” https://www.nhlbi.nih.gov/files/docs/resources/sleep/dwydrv\_y.pdf (accessed Jul. 06, 2020).
[18] C. C. Caruso, E. M. Hitchcock, and E. J. Dalsey, “Safer – Healthier – People tm Other Resources Do you have a sleep disorder? Truck Drivers,” 2014. Accessed: Jul.06,2020. [Online]. Available: http://www.cdc.gov/sleephttp://www.sleepfoundation.org/http://drowsydriving.org/http://www.nhlbi.nih.gov/health/resources/sleep/.
[19] “Awake, Alert, Alive: Overcoming the Dangers of Drowsy Driving.” https://www.ntsb.gov/news/events/Pages/2014\_Drowsy\_Driving\_FRM.aspx (accessed Jul. 06, 2020).
[20] “Drowsy Driving - Stay Alert, Arrive Alive.” https://drowsydriving.org/ (accessed Jul. 06, 2020).
[21] X. Zhang et al., “Design of a fatigue detection system for high- speed trains based on driver vigilance using a wireless wearable EEG,” Sensors, vol. 17, no. 3, p. E486, 2017.
[22] P. Philip et al., “Fatigue, sleepiness, and performance in simulated versus real driving conditions,” Sleep, vol. 28, no. 12, pp. 1511–1516, 2005.
M. Hirshkowitz, “Fatigue, sleepiness, and safety: Definitions, assessment, methodology,” Sleep Med. Clin., vol. 8, no. 2, pp. 183–189, 2013.
[23] A. Williamson, R. Friswell, J. Olivier, and R. Grzebieta, “Are drivers aware of sleepiness and increasing crash risk while driving?” Accident Anal. Prevention, vol. 70, pp. 225–234, Sep. 2014.
[24] G. Yang, Y. Lin, and P. Bhattacharya, “A driver fatigue recognition model based on information fusion and dynamic Bayesian network,” Inf. Sci., vol. 180, no. 10, pp. 1942–1954, May 2010.
[25] A. Campagne, T. Pebayle, and A. Muzet, “Correlation between driving errors and vigilance level: Influence of the drivers’ age,” Physiol. Behav., vol. 80, no. 4, pp. 515–524, 2004.
[26] P. Gershon, D. Shinar, T. Oron-Gilad, Y. Parmet, and A. Ronen, “Usage and perceived effectiveness of fatigue countermeasures for professional and nonprofessional drivers,” Accident Anal. Prevention, vol. 43, no. 3, pp. 797–803, 2011.
[27] Zhuoni Jie, Marwa Mahmoud, Quentin Stafford-Fraser, Peter Robinson, Eduardo Dias and Lee Skrypchuk, “Analysis of yawning behavior in spontaneous expressions of drowsy drivers” in 2018 13th IEEE International Conference on Automatic Face & Gesture Recognition, 15–19 May, 2018, Xi’an, China.
[28] Yuan Liao, Guofa Li, Shengbo Eben Li, Bo Cheng and Paul Green, “Understanding Driver Response Patterns to Mental Workload Increase in Typical Driving Scenarios”in IEEE Access, 28 June, 2018, 10.1109/ACCESS.2018.2851309.
[29] Anwar, Suzan & Milanova, Mariofanna & Al-Nadawi, Daniah. (2018), “Real Time Eye Blink Detection Method for Android Device Controlling”, Intelligent Systems Reference Library. 205–222. 10.1007/978-3-319-67994-5_8.
[30] Jennifer Howcroft, Bruce Wallace, Rafik Goubran, Shawn Marshall, Michelle M. Porter and Frank Knoefel, “Changes in Driving Acceleration Pattern Variability Related to Cognitive and Physical Health” in 2018 IEEE EMBS International Conference on Biomedical & Health Informatics, 4–7 March, 2018, Las Vegas, Nevada, USA.
[31] Xinrong Wu, Junwei Zhou, Jinghe An and Yanchao Yang, “Abnormal Behaviour Detection for Bus Based on the Bayesian Classifier” in 2018 Tenth International Conference on Advanced Computational Intelligence, March 29–31, 2018, Xiamen, China.
[32] Jennie Lioris, Annie Bracquemond, Gildas Thiolon and Laurent Bonic, “Lane change detection algorithm on real world driving for arbitrary road infrastructure” in 2018 42nd IEEE Conference on Computer Software & Applications, 23–27 July, 2018, Tpkyo, Japan.
[33] Juan Guerrero-Ibanez, Sherali Zeadally and Juan Contreras-Castillo, “Sensors Technology for Intelligent Transportation Systems” in MDPI Sensors Journal, 16 April, 2018, 10.3390/s18041212.
Biographies

Sayon Karmakar is pursuing Doctoral studies at University of Arkansas at Little Rock (UALR) under Dr. Seshadri Mohan and also a masters student at National Institute of Technology, Sikkim, India. He was a research intern in the UALR, USA under Dr. Seshadri Mohan and developed a Driver Drowsiness Detection System using multiple ML algorithms which was presented in 41st Meeting of Wireless World Research Forum (WWRF) in Aarhus University, Herning, Denmark. He has been a research coordinator to a group of students to University of Nevada, Las Vegas. Jointly with Dr. Mohan, he has given invited talks at IEEE 5G Summit held at Bihar Institute of Technology, Sindri and Indian Institute of Technology (IIT) Dhanbad and IEEE ANTS 2020 conference held by IIIT, Delhi. He holds a bachelor’s degree in electrical engineering from Siksha O Anusandhan deemed to be University, India. His current interest is concerned with “Monitoring biomarkers of drivers with medical wireless sensor networks deployed in Connected Vehicles”, “Intelligent ADAS and Adaptive Vehicular Networks: Machine Learning Perspective” and “Medical Imaging under Connected Vehicles Environment”.

Seshadri Mohan is currently a professor in Systems Engineering Department at University of Arkansas at Little Rock, where, from August 2004 to June 2013, he served as the Chair of the Department of Systems Engineering. Prior to the current position he served as the Chief Technology Officer (CTO) and Acting CEO of IP SerVoniX, where he consulted for several telecommunication firms and venture firms and served as the CTO of Telsima (formerly known as Kinera). Besides these positions, his industry experience spans a decade at New Jersey-based Telcordia (formerly Bellcore) and Bell Laboratories. Prior to joining Telcordia, he was an associate professor at Clarkson and Wayne State Universities. Dr. Mohan has authored/co-authored over 125 publications in the form of books, patents, and papers in refereed journals and conference proceedings with citations to his publications in excess of 5880. He has co-authored the textbook Source and Channel Coding: An Algorithmic Approach. He has contributed to several books, including Mobile Communications Handbook and The Communications Handbook (both CRC Press). He holds fourteen patents in the area of wireless location management and authentication strategies as well as in the area of enhanced services for wireless. He is the recipient of the SAIC Publication Prize for Information and Communications Technology. He has served or is serving on the Editorial Boards of IEEE Personal Communications, IEEE Surveys, IEEE Communications Magazine, Journal of Mobility and Cyber Security and International Journal on Wireless Personal Communications (Springer) and has chaired sessions in many international conferences and workshops. He has also served as a Guest Editor for several Special issues of IEEE Network, IEEE Communications Magazine, and ACM MONET. He served as a co-guest editor of the Feature Topic “Human Bond Communications,” that appeared in the February 2019 issue of IEEE Communications Magazine. He served as a guest editor of 2015 October IEEE Communications Feature Topic titled “Social Networks Meet Next Generation Mobile Multimedia Internet,” March 2012 IEEE Communications Feature Topic titled “Convergence of Applications Services in Next Generation Networks” as well as the June 2012 Feature Topic titled “Social Networks Meet Wireless Networks.” In April 2011, he was awarded 2010 IEEE Region 5 Outstanding Engineering Educator Award. He received the best paper award for the paper “A Multi-Path Routing Scheme for GMPLS-Controlled WDM Networks,” presented at the 4th IEEE Advanced Networks and Telecommunications Systems conference. Dr. Mohan is a co-founder of the startup IntelliNexus, LLC, the objective of which are the development of innovative adhoc vehicular networking to advance the notion of connected cars and the development of IoT and IoV applications to improve traffic safety and reduce accidents and congestion. He holds a Ph.D. degree in electrical and computer engineering from McMaster University, Canada, the Master’s degree in electrical engineering from the Indian Institute of Technology, Kanpur, India, and the Bachelor’s degree in Electronics and Telecommunications from the University of Madras, India.
Journal of Mobile Multimedia, Vol. 17_1-3, 311–328.
doi: 10.13052/jmm1550-4646.171316
© 2020 River Publishers