Evaluation of Distance Error with Bluetooth Low Energy Transmission Model for Indoor Positioning
Pichaya Supanakoon and Sathaporn Promwong*
Department of Telecommunications Engineering, School of Engineering, King Mongkut’s Institute of Technology Ladkrabang, Thailand
E-mail: pichaya.su@kmitl.ac.th; sathaporn.pr@kmitl.ac.th
*Corresponding Author
Received 25 September 2020; Accepted 10 February 2021; Publication 18 June 2021
Abstract
Currently, an indoor positioning is a challenge application for location-based services (LBS) and proximity-based services (PBS). However, the indoor channel has dense multipath fading, causing more distance error than outdoor positioning. In this paper, the distance error analysis model is proposed for indoor positioning. The indoor channel is modeled as the sum of path loss model and multipath fading model. The path loss model is a linear regression model (LRM) based on Friis’ transmission formula, used for estimating the distance from received signal strength (RSS). The multipath fading is a Gaussian statistical model with zero mean, used for characterizing the multipath fading effect. The normalized distance error is evaluated and defined. The indoor channel with Bluetooth low energy (BLE) beacons is measured and compared with the proposed model. From the results, the normalized distance error obtained from the proposed model corresponds very well to measurement. This proposed model can be used as a tool for designing an indoor positioning system to obtain the specific distance error.
Keywords: Distance error, indoor positioning, Bluetooth low energy (BLE) beacon, location-based service (LBS), linear regression model (LRM).
1 Introduction
At present, Internet of Things (IoT) has been developed to create the new services called location-based services (LBS) and proximity-based services (PBS) by estimating the user position via smartphone [1–10]. An outdoor positioning commonly uses global positioning system (GPS) with high accuracy and distance error less than 5 m [11]. However, an indoor positioning using GPS causes a very high error because there are the objects that obstruct the direct path of GPS signal from satellite to smartphone or GPS receiver. Therefore, other technologies are necessary for indoor positioning to achieve high accuracy.
The indoor positioning is more challenging than the outdoor positioning due to dense multipath fading in the indoor channel [12–14] resulting in more distance error. The wireless technologies have been used for indoor positioning such as WiFi, ZigBee, LoRa, radio frequency identification (RFID), ultra wideband (UWB), and Bluetooth low energy (BLE) [15–18]. The popular technology for indoor positioning is BLE beacons because they have significant advantages compared with other technologies, which are low cost and use low energy [19]. The received signal strength (RSS) is measured by smartphone and used to estimate the distance between BLE beacon and smartphone. Unfortunately, the RSS is directly disturbed by multipath fading, causing high distance error. Therefore, distance error analysis of channel is necessary for indoor positioning.
In this paper, the distance error analysis model is proposed for indoor positioning. The indoor channel is modeled as the sum of path loss model and multipath fading model. The path loss model is a linear regression model (LRM) based on Friis’ transmission formula, used for estimating the distance from RSS. The multipath fading is a Gaussian statistical model with zero mean, used for characterizing the multipath fading effect. The normalized distance error is evaluated and defined. The parameters that affect the distance error are path loss exponent, standard deviation of multipath fading effect, and distance between transmitter and receiver. The indoor channel with BLE beacons is measured and compared with the proposed model. From the results, the normalized distance error obtained from the proposed model corresponds very well to measurement. The time diversity with mean combiner can be used to reduce the distance error. This proposed model can be used as a tool for designing an indoor positioning system to obtain the specific distance error.
The rest of the paper is organized as follows. In Section 2, the theory of distance error analysis model is described. Next, Section 3 is measurement setup. After that, the results of distance error analysis of proposed model are illustrated and compared with measurement in Section 4. Finally, conclusion is drawn in Section 5.
2 Distance Error Analysis Model
2.1 Indoor Channel Model
Indoor channel model is defined as the sum of path loss model and multipath fading model, and it can be written as [14]
| (1) |
where is the received power that results from only path loss and is equivalent to the average value of , and is multipath fading effect and is RSS that can be measured directly from the receiver. The bold letters indicate the random variables.
2.2 Path Loss Model
Path loss model is a model that shows the relation of received power that decreases by distance and is based on Friis’ transmission formula [14]:
| (2) |
where is path loss exponent, is distance between transmitter and receiver, and is reference received power at distance of 1 m. Practically, the path loss model can be obtained from RSS, which is measurement at different distances covering all usage area. Then, LRM is used to estimate parameters and that make the path loss model with least total square error. The distance error can be calculated from
| (3) |
where is RSS measured at distance and is total number of measurement. Next, the total square error can be evaluated from
| (4) |
Parameters and are evaluated from least total square error, which can be done by using partial derivative of total square error with respect to and , setting these equal to zero:
| (5) | |
| (6) |
Above equations are rearranged in the form of linear equation system:
| (7) | |
| (8) |
This linear equation system is solved. The parameters of path loss model are
| (9) | |
| (10) |
2.3 Multipath Fading Model
When RSS is measured at different distances covering all usage area and path loss model is evaluated, multipath fading model can be calculated from
| (11) |
The effect of multipath fading is random variable, which is characterized as a Gaussian statistical model with zero mean. That is,
| (12) |
where is member of multipath fading effect.
Therefore, probability density function (PDF) of multipath fading effect, which is defined as [20]
| (13) |
when is standard deviation.
Cumulative distribution function (CDF) of multipath fading effect is defined as [15]
| (14) |
when function is defined as [15]
| (15) |
2.4 Distance Error Model
The correct distance is the distance, which is calculated from RSS obtained from only path loss and has no effect of multipath fading. Therefore, the RSS can be written as
| (16) |
For this condition, is constant at each distance because it does not have component of random variable. Therefore, the correct distance can be defined as
| (17) |
Naturally, the RSS measured from receiver has both path loss and multipath fading effect. Therefore, the RSS can be written as
| (18) |
Then, the estimated distance is defined as
| (19) |
It can be seen that the estimated distance is a random variable that has direct effect from random variable of multipath fading effect. The distance error is defined as absolute value of difference between correct and estimated distances. It can be written as
| (20) |
when is normalized distance error and is defined as
| (21) |
Maximum distance between transmitter and receiver that causes the mean of distance error equal to specific value can be calculated from
| (22) |
where is mean of normalized distance error.
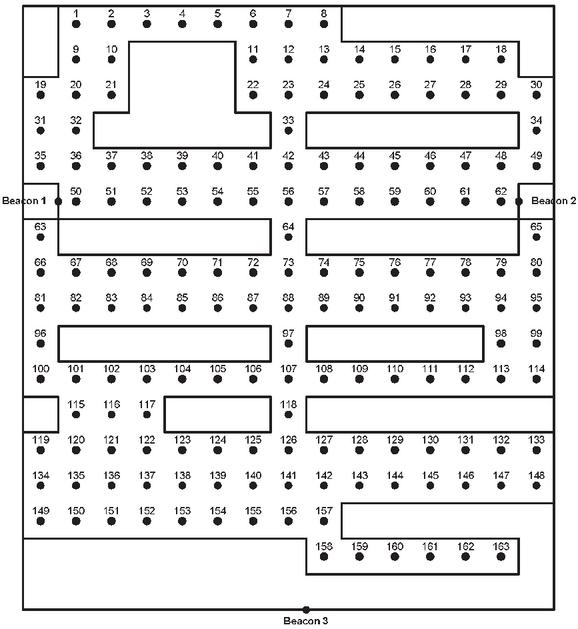
Figure 1 Room layout and measurement positions.
3 Measurement Setup
For comparison, the indoor channel is measured. The indoor environment is the computer laboratory room. This room has 9.0 m width and 10.2 m length. There are many computers, desks, and chairs in this room. There are 15 measurement positions along width and 17 measurement positions along length. The distance increment of each point along width and length is 0.6 m. There are total 163 positions that can be measured (positions without obstruction). The three BLE beacons are installed 1.8 m above the floor at the left, right, and back walls. Huawei P10 Plus smartphone is used to measure the RSS of each BLE beacons at each position. The room layout and measurement positions are shown in Figure 1.
4 Comparison Results
The RSS of each BLE beacon and each position is measured and is used to model the path loss. Figure 2 shows the measured RSS compared with obtained path loss model. This path loss model has path loss exponent of 1.34 and reference received power at 1 m distance of 68.73 dBm.
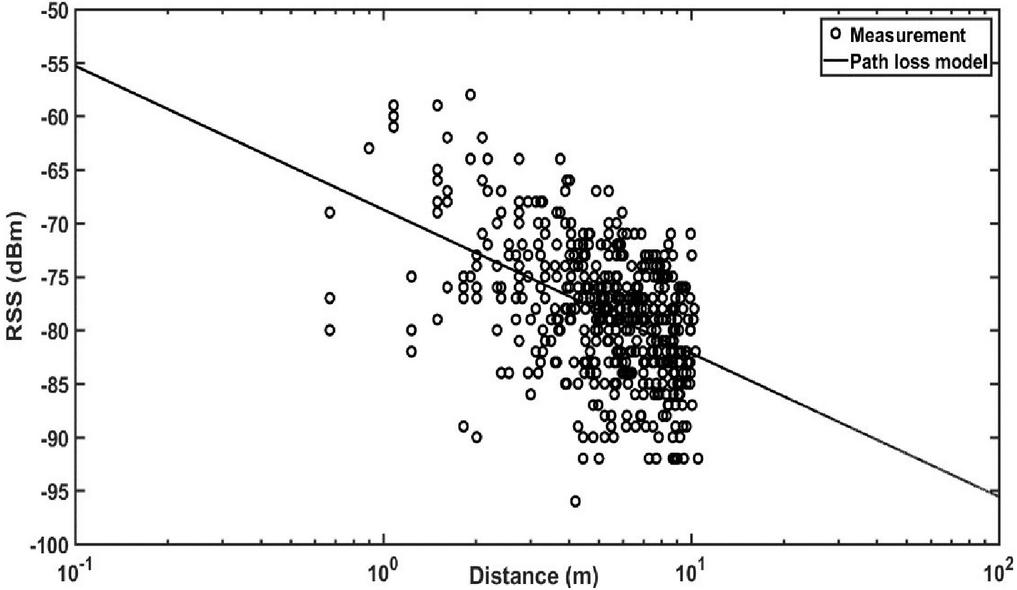
Figure 2 Measured RSS compared with path loss model.
Then, the effect of multipath fading is evaluated from measured RSS and path loss model. The obtained multipath fading effect has mean of 0 dB and standard deviation of 5.59 dB. Figures 3 and 4 show PDF and CDF of measured multipath fading effect compared with multipath fading model, which is Gaussian statistical model. From the results, both PDF and CDF of measure multipath fading effect can be modeled as Gaussian distribution as well.
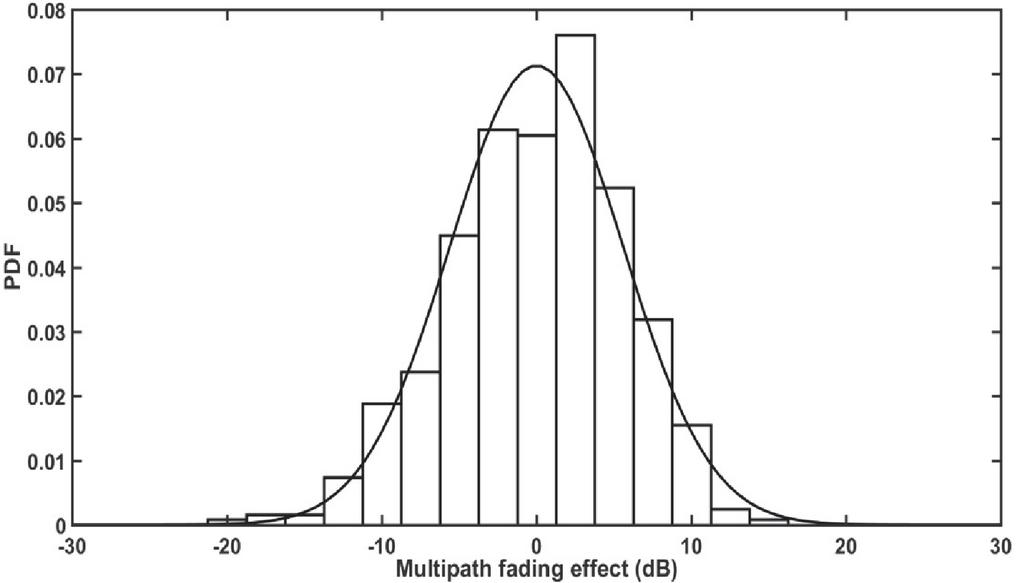
Figure 3 PDF of multipath fading effect.
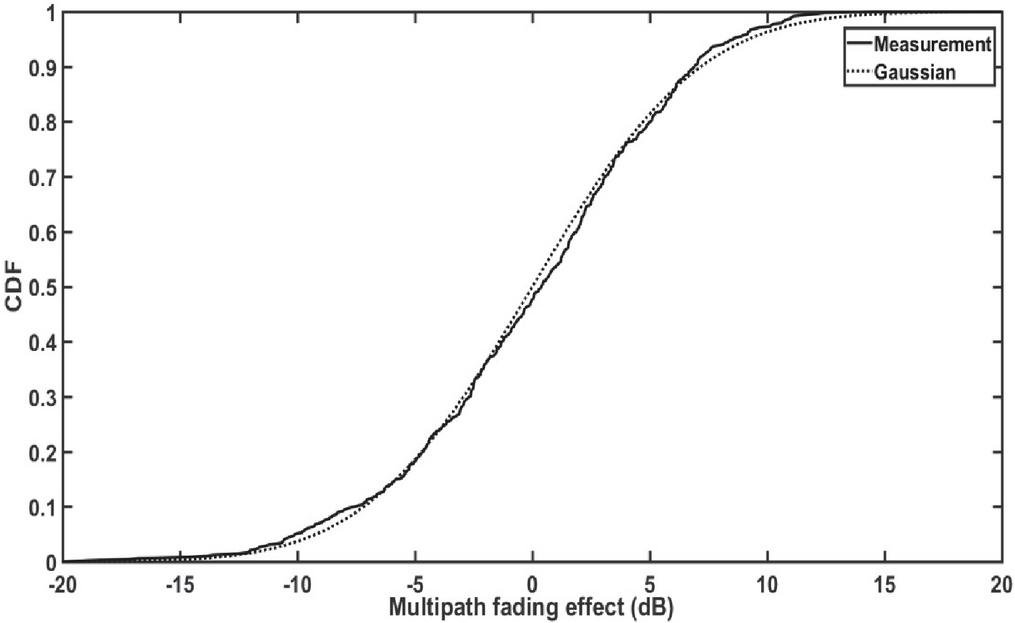
Figure 4 CDF of multipath fading effect.
After that, the mean of normalized distance error is computed using measurement data and is compared with the proposed model. Figures 5 and 6 show PDF and CDF of normalized distance error obtained from measurement compared with the proposed model. The CDF and PDF of normalized distance error obtained from proposed model with mean of 1.14 m correspond very well to measurement with mean of 1.05 m.
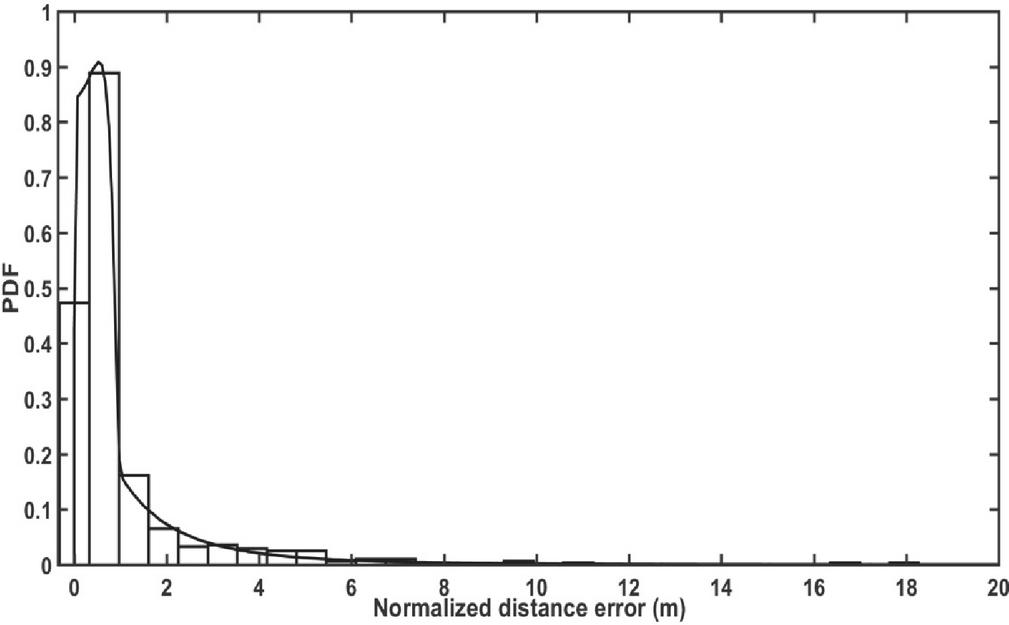
Figure 5 PDF of normalized distance error.
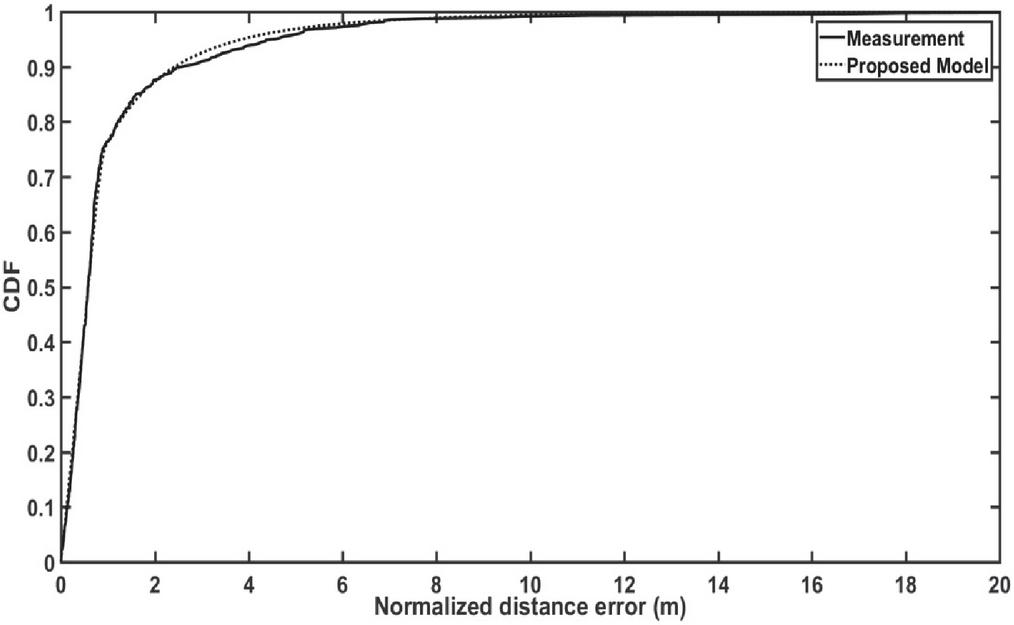
Figure 6 RCDF of normalized distance error.
Because the multipath fading effect of measured indoor channel has high standard deviation, the time diversity is used to reduce the effect of multipath fading and normalized distance error. The mean combination is used in this paper. The numbers of time diversity from 2 to 10 are considered. Figure 7 shows the parameters of path loss model with time diversity. The result shows that the number of time diversity has little effect on path loss exponent and reference received power at 1 m distance.
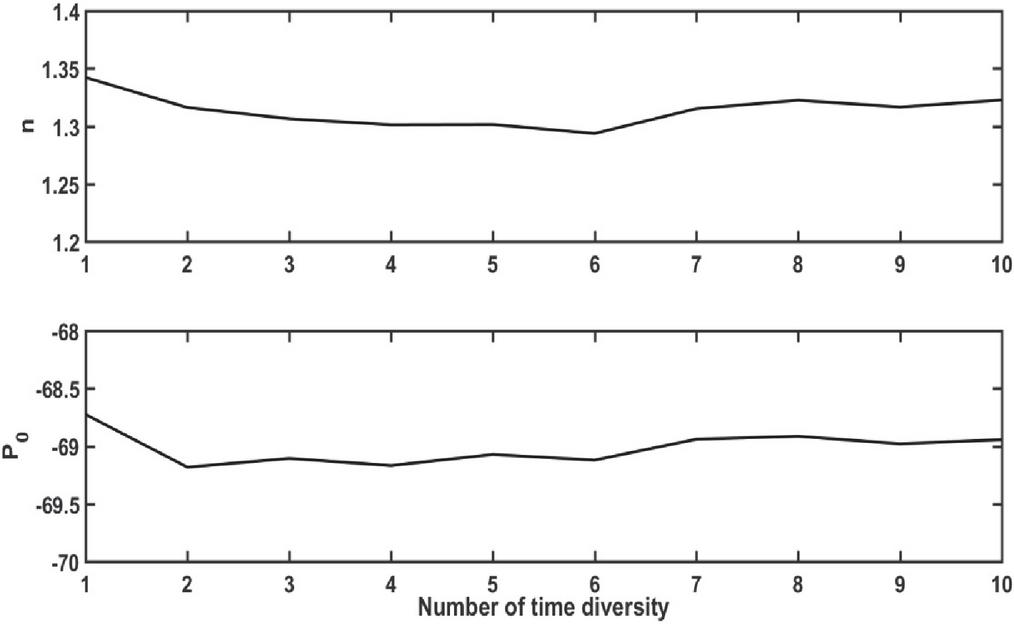
Figure 7 Parameters of path loss model with time diversity.
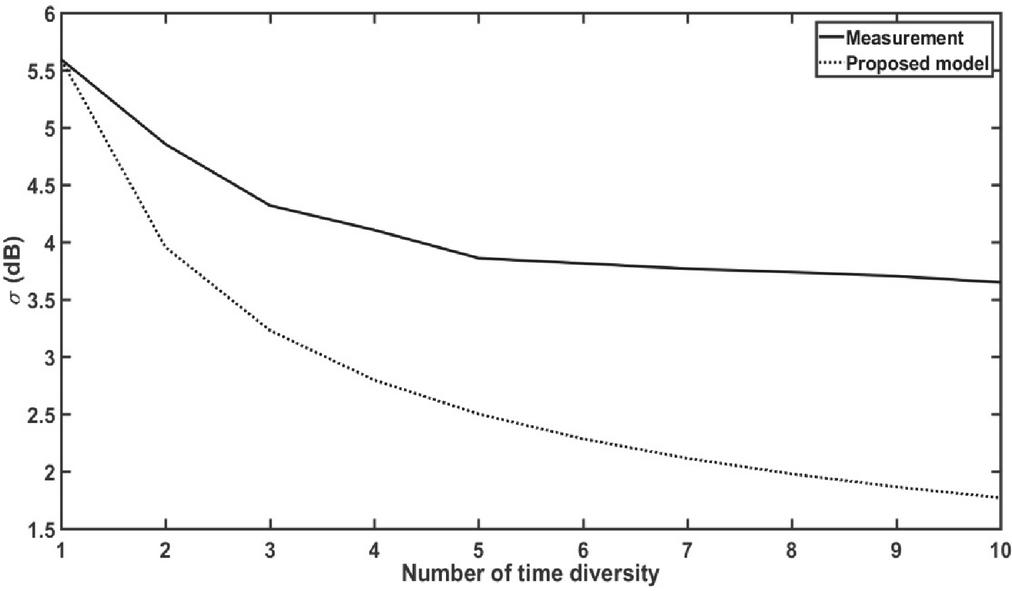
Figure 8 Standard deviation of multipath fading effect with time diversity.
Next, standard deviation of multipath fading effect with time diversity of measurement compared with simulation of the proposed model is shown in Figure 8. The standard deviation of measurement tends to decrease slower and has more difference compared with the proposed model when the number of time diversity is increased. When the number of time diversity is 10, the standard deviations of measurement and the proposed model are 3.65 and 1.77 dB, respectively. The proposed model does not accurately predict the standard deviation of multipath fading effect. Therefore, path loss exponent and standard deviation of measurement with time diversity is used to predict the normalized distance error for proposed model.
Figure 9 shows the mean of normalized distance error of measurement compared with the proposed model using path loss exponent and standard deviation obtained from time diversity. The result shows that the mean of normalized distance error of measurement corresponds to the proposed model, especially when there is a large number of time diversity.
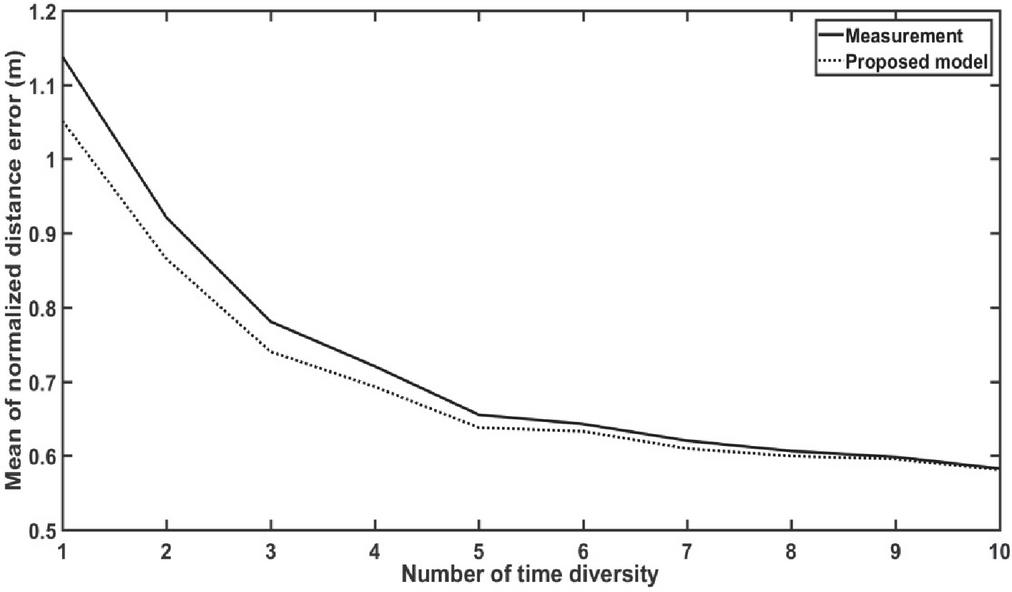
Figure 9 Standard deviation of multipath fading effect with time diversity.
5 Conclusion
This paper evaluated the distance error analysis model for indoor positioning. The indoor channel with BLE beacons is measured and compared with the proposed model. The normalized distance error is defined as the relation between path loss exponent and standard deviation of multipath fading effect. In addition, the maximum distance is defined and is used as maximum boundary that obtained specific distance error. From the results, the normalized distance error with and without time diversity obtained from measurement corresponds very well to proposed model. This proposed model can be used as a tool for designing an indoor positioning system to obtain the specific distance error.
Acknowledgement
This work is supported by School of Engineering, King Mongkut’s Institute of Technology Ladkrabang. The authors would like to thank Focal Solution Co., Ltd., for providing BLE beacons. They would also like to thank Rachapong Pronwiriyangkura for technical assistance.
References
[1] N. Kamarudin and S. Salam, “Enabling mobile location based services for emergency cases,” International Conference on Research and Innovation in Information Systems, 2011.
[2] C. Chang, S. N. Srirama and J. Mass, “A middleware for discovering proximity-based service-oriented industrial internet of things,” IEEE International Conference on Services Computing, pp. 130–137, 2015.
[3] Y. Hu, “Research and design of campus location based service system,” International Symposium on Distributed Computing and Applications for Business Engineering and Science (DCABES), pp. 192–195, 2015.
[4] Q. Huang and K. Kietter, “An intelligent internet of things (IoT) sensor system for building environment monitoring,” Journal of Mobile Multimedia, vol. 15, no. 1–2, pp. 29–50, January 2019.
[5] G. Bassma, S. Tayeb, and A. Esmail, “A map-matching based approach to compute and modelize nlos and multipath errors for gnss positioning in hard areas,” Journal of Mobile Multimedia, vol. 13, no. 3–4, 256–269, 2017.
[6] M. A.-Nouman, O. H. Salman, H. T.-Rizk and M. Hope, “A new architecture for location-based services core network to preserve user privacy,” Annual Conference on New Trends in Information & Communications Technology Applications (NTICT), pp. 286–291, 2017.
[7] D. Wang, Z. Li and Y. Chen, “Design and implementation of a location based service business management platform,” International Conference on Systems and Informatics (ICSAI), pp. 1631–1635, 2017.
[8] L.-F. Lin and Y.-L. Hsu, “Social event shopping recommendation mechanism for location-based services,” International Cognitive Cities Conference (IC3), pp. 43–44, 2018.
[9] H. Wu, M. Li and H. Zhang, “Enabling smart anonymity scheme for security collaborative enhancement in location-based services,” IEEE Access, vol. 7, pp. 50031–50040, 2019.
[10] I. A. Hassoon, N. Tapus and S. M. S. ALGayar, “Enabling the integration of health-emergency alert with privacy of patients’ location based services,” International Conference on Electronics, Computers and Artificial Intelligence (ECAI), 2019.
[11] K. Liu and X. Li, Mobile SmartLife via Sensing, Localization, and Cloud Ecosystems, CRC Press, 2018.
[12] S. Promwong and J. Thongkam, “Evaluation of Weighted Impulse Radio for Ultra-Wideband Localization,” Accepted to be published in the Wireless Personal Communications.
[13] J. Thongkam, P. Supanakoon and S. Promwong, “Indoor Wireless Sensor Network Localization Using RSSI Based Weighting Algorithm Method for Short Range Wireless Communication,” 2018 International Electrical Engineering Congress (iEECON), Krabi, Thailand, pp. 1–4, 2018.
[14] T. S. Rappaport, Wireless Communications: Principles and Pratice, Prentice Hall PTR, 2002.
[15] W. Narzt, L. Furtmüller, and M. Rosenthaler, “Is Bluetooth Low Energy an Alternative to Near Field Communication,” Journal of Mobile Multimedia, vol. 12, no. 1–2, pp. 76–90, 2016.
[16] F. Zafari, I. Papapanagiotou and K. Christidis, “Microlocation for internet-of-things-equipped smart buildings,” IEEE Internet of Things Journal, vol. 3, no. 1, pp. 96–112, 2016.
[17] S. Sadowski and P. Spachos, “Comparison of RSSI-based indoor localization for smart buildings with internet of things,” IEEE Annual Information Technology, Electronics and Mobile Communication Conference (IEMCON), pp. 24–29, 2018.
[18] S. Sadowski and P. Spachos, “RSSI-based indoor localization with the internet of things,” IEEE Access, pp. 30149–30161, 2018.
[19] P. Spachos, I. Papapanagiotou and K. N. Plataniotis, “Microlocation for smart buildings in the era of the internet of things: a survey of technologies, techniques, and approaches,” IEEE Signal Processing Magazine, pp. 140–152, 2018.
[20] A. Papoulis and S. U. Pillai, Probability, Random Variables and Stochastic Processes, 4th Edition, McGraw-Hill, 2002.
Biographies

Pichaya Supanakoon received the B.Eng. degree in telecommunications engineering and the M.Eng. and D.Eng. degrees in electrical engineering from King Mongkut’s Institute of Technology Ladkrabang, Bangkok, Thailand, in 1998, 2000, and 2012, respectively.
Since 1999, he has been with the Department of Information Engineering. Currently, he has joined the Department of Telecommunications Engineering, Faculty of Engineering, King Mongkut’s Institute of Technology Ladkrabang. Since 2004, he has been an Assistance Professor with King Mongkut’s Institute of Technology Ladkrabang. His research interests are in ultra wideband (UWB) communications, electromagnetic field computation, and radio wave propagation and positioning.

Sathapron Promwong received the B.Ind.Tech. degree in electronic technology and the M.Eng. degree in electrical engineering from King Mongkut’s Institute of Technology Ladkrabang, Bangkok, Thailand, and the Ph.D. degree in communications and integrated systems from Tokyo Institute of Technology, Tokyo, Japan, in 1994, 1999, and 2009, respectively.
Since 1995, he has been with the Department of Information Engineering, and now he has joined the Department of Telecommunications Engineering, Faculty of Engineering, King Mongkut’s Institute of Technology Ladkrabang. Since 2018, he has been an Assistance Professor with King Mongkut’s Institute of Technology Ladkrabang. His research interests are ultra wideband (UWB) system, antenna, radio wave propagation and positioning.
Dr. Promwong is a Member of IEEE, IEICE, and ECTI, and Chapter Chair of IEEE BTS Thailand chapter.
Journal of Mobile Multimedia, Vol. 17_4, 707–722.
doi: 10.13052/jmm1550-4646.17411
© 2021 River Publishers