SNR-Based Early Warning Message Scheme for VANETs
Muath Obaidat1,*, Ihsasn Shahwan1, Ahmed Hassebo1, Suhaib Obeidat2, Mohamed Ali1 and Matluba Khodjaeva3
1 Electrical Engineering Department, City College of New York, NY, USA
2 Computer Science Department, Bloomfield College, NJ, USA
3 Computer Science Department, John Jay College at CUNY, New York, NY, USA
E-mail: muobaidat@ccny.cuny.edu; ishahwan@ccny.cuny.edu; ahasseb00@citymail.cuny.edu; suhaib_obeidat@bloomfield.edu; mali@ccny.cuny.edu; mkhodjaeva@jjay.cuny.edu
* Corresponding Author
Received 15 May 2019; Accepted 16 January 2020; Publication 24 February 2020
Abstract
A Vehicular Ad hoc Network (VANET) is a special type of Mobile Ad hoc Network (MANET). One of the main applications of VANETs is safety. This is accomplished by disseminating an Early Warning Message (EWM) to all vehicles in an emergency zone. However, broadcasting an EWM in a multi-hop environment, such as a VANET, introduces many challenges. The main challenge is the broadcast storm problem. In this paper, we propose a novel broadcasting communication scheme for VANETs. During an emergency situation a congested scenario is possible when vehicle density on the road is high. This causes contention at the MAC layer, which leads to collisions and increases the number of rebroadcasts, hence reducing packet dissemination, increasing delay and network resource use. Our proposed communication scheme is an SNR-based dynamic suppression scheme that aims to significantly reduce the effects of the broadcast storm problem by minimizing the number of rebroadcasting vehicles. The proposed scheme achieves this by considering the physical layer characteristics and the number of times a vehicle receives an EWM. Moreover, we correlate vehicle density and suppression range through a formula to determine the effective suppression range. The proposed scheme maintains network connectivity and achieves almost 100% reachability to all vehicles throughout the zone. Furthermore, the proposed scheme minimizes delay by 0.4 sec in high density scenarios.
Keywords: Warning message, broadcasting, cross-layer, SNR, suppression, VANET.
1 Introduction
Ad hoc networks are characterized by ease of deployment that can provide on the fly connectivity in emergency situations such as natural or man-made disasters areas and in vehicular ad hoc networks [65, 67].
A VANET is an autonomous, temporary and self-configuring type of ad hoc network. The wireless link characteristics may change significantly over time as vehicles are joining and leaving the VANET. This results in topology being very dynamic in VANETs [60, 61, 65, 67, 72, 73].
VANET nodes are mobile vehicles that communicate by exchanging messages over a wireless medium, where the transmission range typically varies between 100 and 300 meters [1–6, 67]. Vehicles in VANETs act as both hosts and forwarding nodes (routers) [5, 2]. VANET nodes might additionally be equipped with communication devices such as GPS receivers or wireless sensors which further facilitate vehicle-to-vehicle and vehicle-to-roadside unit (RSU) communication [5, 7–9, 70, 72, 73].
Many factors contribute to restricting scope and functionality of VANETs in an urban area. This is due to the obstacles in the landscape and environment such as but not limited to irregularity, traffic jams, skyscrapers, and complexity of the road grid. For all previously discussed reasons achieving scalable data dissemination is a very challenging task for a broadcasting protocol in VANETs [61, 62].
VANETs have many applications including enhancing transportation, safety on the road, decreasing the harmful effects of transportation on the environment, improving navigation, responding to weather and traffic changes, and providing entertainment and infotainment [2, 10–13, 67, 69, 71]. One of the most vital uses of VANETs is safety and intelligent transport applications during emergency situations [14–16, 68, 70]. Chen et al. [17] presented a summary of the majority of safety applications of VANETs.
As the number of vehicles increases on the roads so does the number of accidents and fatalities. A study done by Wang and Thompson [18] states that 60% of accidents could be prevented if the vehicle driver were aware of an emergency situation half a second earlier to an accident [19]. In a report by the National Center for Statistics and Analysis [20] it was found that collisions in 2003 caused a death toll of about 43,000 and close to 2.8 million injuries, with a total cost of about $230 billion. The death toll from traffic accidents according to World Health Organization was approximately 1.25 million [52, 68]. The vehicle operator was responsible for about 90% of these collisions. Yang et al. [19] found the time between an emergency on the road and the time it is observed and responded to (by applying brakes) by vehicle operators is about 0.75–1.5 seconds, which translates into around 90 feet at 60 mph speed. This can lead to a massive series of collisions if vehicle operators react sequentially, especially in high density scenarios.
To increase safety on the road and to minimize collisions and their consequences, it is essential that an Early Warning Message (EWM) arrives in a timely manner to all vehicles on the road in a specific zone [69]. To accomplish this, an efficient routing protocol is needed. A routing protocol must utilize the resources efficiently, disseminate an EWM to all vehicles of interest, minimize delay and maintain network connectivity and prevent it from being partitioned.
VANETs have their own challenges in addition to inherited challenges from MANETs in comparison to conventional networks. MANETs experience low throughout, prone to errors, fluctuating channel state over a very short period of time [60, 72]. It is worth noting that wireless communications can be significantly improved using relaying and diversity [65].
Broadcasting is used to disseminate early warning messages, in discovery phase part of the routing process and in maintaining routes between different nodes in the network [64]. In emergency scenarios, it is very crucial to have an efficient and effective broadcasting scheme that not only sends the message but also sends it in a timely manner and reduce interference [64, 65].
Numerous VANET routing and broadcasting protocols have been proposed in the literature to facilitate vehicle-to-vehicle communication, a comprehensive but not exhaustive list of broadcasting protocols can be found in [60]. The authors in [60] classify broadcasting algorithms into two main categories; underlying topology and non-underlying topology. Furthermore they subdivide these two main categories into many leaves. Authors in [64] have surveyed in details and classified probabilistic broadcast schemes.
The vast majority of the proposed protocols in the literature are single layer based routing protocols [7]. However, these protocols make the decision solely based on a single layer with no coordination with other layers in the TCP/IP or OSI models. A detailed review of single layer broadcast routing protocols can be found in [21–23].
Coordination between adjacent layers in a cross-layer design have been shown to offer performance gains [7, 24, 25]. In this paper, we employ a cross-layer based routing protocol for VANETs.
1.1 Major Contribution
One of the key elements in broadcasting is the transmission range. When the transmission range is very long, the communication link is more stable, however, this will result in more interference. If the transmission range is just far enough to communicate with the neighboring vehicle, this reduces interference, increases latency [49]. When vehicle density is high, a short transmission range will minimize interference. It was found in [65] that routes with the more number of hops would increase the number of interfering nodes. This makes selecting an effective routing criteria very challenging task.
The objective of this study is to alleviate the broadcast storm problem in VANETs. Through intensive simulation we were able to find the effective suppression range. So, we proposing a signal-to-noise ratio (SNR)-based dynamic suppression broadcast scheme.
The contribution of this work is threefold; (i) employ cross-layer design to get the most accurate information about the channel state, (ii) propose an SNR-based adaptive dynamic suppression broadcast scheme for VANETs that finds the effective transmission range by measuring the signal strength (SNR), thereby reducing the effect of the hidden terminal problem; (iii) alleviate the broadcast storm problem by minimizing the number of message rebroadcasts. This is achieved by using vehicle density and the SNR of the received EWM to assign a higher probability and time priority to select nodes to rebroadcast.
Our proposed SNR-based dynamic suppression broadcast scheme does not require any information about neighboring vehicles (i.e. does not rely on the continuous transmission of Hello beacon messages). The protocol is distributed in nature and does not rely on a central or stationary controller or sink such as RSUs. The next hop is determined based on the SNR in a distributed fashion. Therefore, each vehicle in the VANET makes its own decision on whether to rebroadcast. The proposed protocol accomplishes connectivity, 100% reachability and high delivery ratio without the control and forwarding overhead while minimizing delay and number of rebroadcasted messages.
The rest of the paper is organized as follows: Section 2 covers related work to broadcasting in VANETs and broadcasting communication schemes in VANETs. System architecture and protocol dynamics of the proposed scheme are presented in Section 3. Section 4 covers performance evaluation of the proposed scheme including simulation parameters and environment, performance metrics, physical layer characteristics, and path loss model. Results and discussion are presented in Section 5. Section 6 concludes the paper with some future work remarks.
2 Related Work
2.1 Broadcasting in VANETs
Broadcasting refers to distributing a message to all vehicles in a certain region to accomplish a certain goal. A broadcasting scheme needs to be efficient, disseminating an EWM message to all vehicles in the network while using minimum bandwidth and with minimum latency [14, 15]. Reachability is the percentage of vehicles within a given geographic area that a broadcast scheme is able to deliver a message to [26]. Reachability could be expressed in a probability form as [50]:
| (1) |
Where R is the reachability, VRec the number of vehicles receiving the message and VN the total number of vehicles on the map.
In addition, a broadcast scheme must be able to maintain connectivity throughout the network and not result in network segmentation. Connectivity is achieved when every vehicle is able to reach and communicate, possibly through intermediate nodes, with every other vehicle in a given region in any given time interval [27]. Furthermore, a broadcast scheme must minimize resource usage, the most crucial resource in this case being bandwidth. This depends on the number of vehicles involved in rebroadcasting the message and the number of message rebroadcasts between source and destination (number of hops) [53].
Broadcasting has become the dominant technique to disseminate EWMs for safety purposes, where an EWM is considered time-sensitive [28, 29]. VANETs pose many challenges; high mobility results in a constantly changing and dynamic topology [29, 73].
Unchecked broadcasting through flooding is inefficient in wired networks. It wastes bandwidth with unnecessary traffic, wastes CPU cycles of participating nodes, indirectly denies service to legitimate traffic, and quickly deteriorates into a broadcast storm [72, 73]. Flooding-based broadcasting becomes even more problematic in wireless and mobile environments. It results in higher contention for channels, which in turn results in higher packet delays and losses, and it drains power more quickly. This is particularly true in dense zones with a high number of vehicles per km2 [30–32, 71].
Routing protocols for Mobile Ad hoc Networks (MANETs) are not suitable for VANET applications. VANETs have a high degree of mobility which results in frequent changes to the network topology [71]. In addition, the presence of many objects of variant sizes in the path of vehicles further exacerbates the variance in the wireless channel quality [7]. Furthermore, node density is irregular and unpredictable [4]. Lastly, broadcasting is the main method for message dissemination in VANETs [31]. A survey on broadcast protocols in MANET can be found in [60].
2.2 Broadcasting Communication Schemes in VANETs
The first and simplest form of broadcasting is flooding, where each node in the network rebroadcasts a received message as soon as it gets it [64]. The flooding scheme suffers from many drawbacks such as degrading network efficiency with redundant, unnecessary rebroadcasts, hence increasing contention and collisions, causing the broadcast storm problem [6, 33, 64, 72]. In addition, in sporadic network the protocol performs poorly in terms of coverage [60, 64].
Routing protocols in VANETs can be classified into five categories based on the route creation technique used; these include topology-based, position-based, geocast-based, cluster-based and broadcast-based routing [34, 54, 55]. Broadcast based schemes waste resources such as bandwidth [54]. Also, these schemes works well in low density scenarios [54]. However, different categorization methods have been proposed by [60, 63, 73].
Many schemes have been proposed to solve the broadcast storm problem in VANETs mainly based on priority, probability or time. Tonguz, Wisitpong-phan and Parikh [35] proposed a scheme for urban road broadcasting that solves the hidden terminal problem and alleviates the effects of the broadcast problem, however, it introduces significant overhead.
Tseng et al. [36] proposed a few protocols to alleviate the broadcast storm problem by excluding some vehicles from rebroadcasting based on their location and how many times an EWM message was broadcast, however some of these proposed protocols suffer significantly in high density scenarios. Tonguz et al. [56] devised a new broadcast protocol; Distributed Vehicular Broadcast (DV-CAST). The protocol did not study the performance metrics E2E delay and packet delivery ratio that we have measured in our study.
Korkmaz et al. [37] devised a cluster-based broadcasting scheme that is incorporated in the emergency brake light, a scheme that has an advantage over the flooding technique. The authors in [31] proposed three broadcast-suppression schemes; weighted p-persistent, slotted l-persistence and slotted p-persistence.
Torrent-Moreno [38] proposed a protocol that assigns a rebroadcast priority. Nodes with higher priority have a shorter wait time before retransmitting an EWM. Ibrahim et al. [39] proposed a probabilistic broadcasting protocol. Dong, et al. proposed a Cluster-based Recursive Broadcast (CRB) scheme to disseminate EWM [58]. CRB performed well in very low density 40 vehicles scenarios. However, the proposed scheme was not tested under high density scenarios and many parameters were not clearly stated in the article.
Most of the previously reviewed protocols did not consider vehicle density as one of the parameters considered in their calculations and decisions regarding rebroadcasting and/or did not incorporate other factors from different layers in the TCP/IP or OSI models.
Chen et al. [40] proposed a distance-based, centralized scheme that depends on a central control unit for event management. This is not practical because RSUs are not available in all environments due to their high cost. Shea, Hassanabadi, and Valaee [41] proposed a cluster-based scheme in which neighboring vehicles exchange status updates regarding their respective speeds, locations, and IDs. This scheme introduces substantial overhead and wastes network bandwidth.
Min-Te Sun et al. in [42] proposed a Distance Differ Transmission (DDT) protocol, a distance-based scheme. A vehicle, upon hearing the transmission of a message, defers transmission of the message. By imposing this condition, inhibition of broadcasting an EWM occurs. To resolve the deficiency of DDT, Korkmaz et al. [43] proposed the Directional Broadcast (DIB) protocol. DIB uses a Request to Broadcast and Clear to Broadcast (RTB/CTB) technique. However, if the farthermost vehicle is out of the communication range of the sender, broadcasting may fail because of the difference in speed between the two vehicles [44].
Urban Multi-hop Broadcast (UMB), which uses a RTS/CTS mechanism to solve the hidden terminal problem, is proposed in [11]. UMB divides the road into sections according to the direction of dissemination. Korkmaz et al. [45] proposed Ad hoc Multihop Broadcast (AMB) which is an improved version of UMB. Wai Chen et al. [46] surveyed geocast and broadcast schemes in VANETs. The majority of broadcast schemes use the position to determine the next node to forward the message to in order to disseminate an EWM. Vector-based Tracking Detection (V-TRADE) is one of the earliest broadcasting protocols proposed for VANETs [47], however, it suffers from significant control overhead making its use infeasible. Mariyasagayam et al. [48] proposed Multihop Vehicular Broadcast (MHVB), a protocol that creates a backfire zone. If a vehicle is in this zone, it does not forward the EWM.
Liu et al. [59] proposed a Congestion Aware version of the Greedy Perimeter Coordinator Routing (GPCR) called CA-GPCR. The proposed protocol Introduces more overhead via requiring each vehicle to broadcast a Hello message to its neighboring nodes among other parameters that nodes need to keep track of. Also, some simulation parameters were not stated in the study such as the MAC protocol used. The study did not address the number of rebroadcasts that the protocol needs to perform to ensure that the EWM has been received by the maximum number of vehicles in the network. In addition, reachability was not addressed.
The aforementioned schemes works well in low density scenarios [54]. However, they underperform in sparse situations when vehicles are far apart from each other. This is mainly due to transmission range limitation [54]. Reachability is not achieved; not all vehicle will receive the EWM about a hazard on the road that means safety is not accomplished. On the other hand, in situations where the topology around vehicles is not the same (i.e. some have too many neighbors and some few) a suppression and adaptive scheme is needed. On the contrary, our proposed scheme works well in both environments; low and high density scenarios and adapt to these scenarios.
3 System Architecture and the Proposed Protocol
The dynamics of the proposed protocol consists of two main phases as shown in Figure 1. The first phase occurs when a vehicle receives a broadcast message for the first time. If the vehicle is within a 90 m zone (i.e. SNR of the received message is greater than 34 dB), the vehicle will not rebroadcast the message. If a vehicle is located in the outer ring, it is given a higher rebroadcast priority, achieved by being assigned a relatively shorter broadcast time, between 0 and 50 msec. If the vehicle is in the inner zone, it is assigned a low broadcast priority time of 75–95 msec. Assigning higher priority to farther vehicles means these vehicles have shorter back-off time so they rebroadcast earlier than low rebroadcast priority vehicles that are closer to the source of the broadcast. Choosing priority times (high and low) should be done carefully. A too small priority window of ≪50 msec will increase collisions between far vehicles, and a too large priority window may cause longer delays, defeating the purpose of the early EWM messages which must be delivered as fast as possible for safety applications.
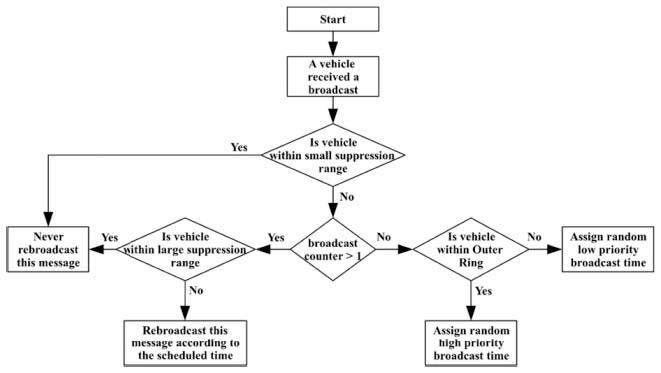
Figure 1 Dynamics of SNR-based dynamic suppression broadcast scheme.
The second phase suppresses nearby neighbors of the rebroadcasting vehicle. If the vehicle received the broadcast message before and it is located within a large suppression range of 175 m (i.e. the SNR of the received message is between 33–23.5 dB) it will not take any action (i.e. no rebroadcast).
Suppression ranges are shown in Figure 2, where the transmission range has been divided into three concentric regions. The innermost circle is the primary suppression range of radius 90 m which corresponds to an SNR threshold greater than 34 dB. No vehicle in this region is allowed to rebroadcast a message.
Vehicles in the middle region (91∼200 m) have a low rebroadcast priority time since these vehicles are close to the source broadcasting node. The outer ring has a higher priority in order to achieve reachability using a minimum number of broadcasts while reducing latency. The parameters for different regions and the actions taken are summarized in Table 1. Change in SNR over distance is shown in Figure 3, this is found in literature and based on values taken from Opnet [50, 51]. The details of the protocol are illustrated in Figures 4–6.
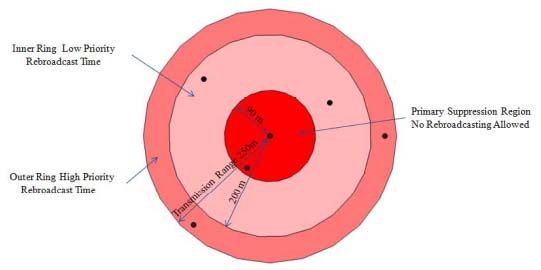
Figure 2 Different suppression regions around a vehicle.
Table 1 Suppression regions & action
| Range | Distance in m | Action |
| Primary Suppression Range | 0–90 | Never rebroadcast |
| Inner Ring | 91–199 | Low priority rebroadcast time |
| Outer Ring | 200–250 | High priority rebroadcast time |
| Large Suppression Range | 91–175 | If counter >1 never rebroadcast |
Figure 4 shows the vehicle in the outer ring (200–250 m) from the source vehicle of the source node broadcasting a message; this has high priority rebroadcast time, so it has a random high priority broadcast time between 0 to 50 msec. It is worth pointing out that the probability of a vehicle in this region is 0.36. Now the vehicle in the inner ring will have a low priority rebroadcast time between 75 to 95 msec, however, this vehicle falls within the large suppression range of 175 m from the vehicle in the outer ring. Its counter for that message is more than one since it has received the message from the vehicle in the outer ring; as a result, its scheduled rebroadcast is cancelled.
Figure 5 shows that the vehicle in the outer ring with high priority rebroadcast time will rebroadcast the message received from the original source, also the figure shows phase two of the proposed protocol; any vehicle in this region will cancel its rebroadcast.
We are aware that the range is not perfectly circular because of obstacles in the environment. However, by using SNR as a guide, one can assume that the vehicle receiving low SNR is in the outer zone of the transmission range given the environmental conditions. The circular range shown in the diagrams is for illustration purposes only.
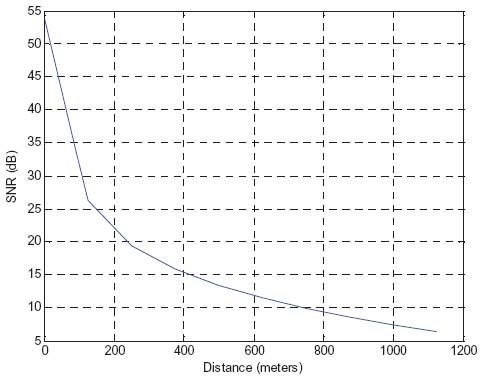
Figure 3 SNR vs. distance.
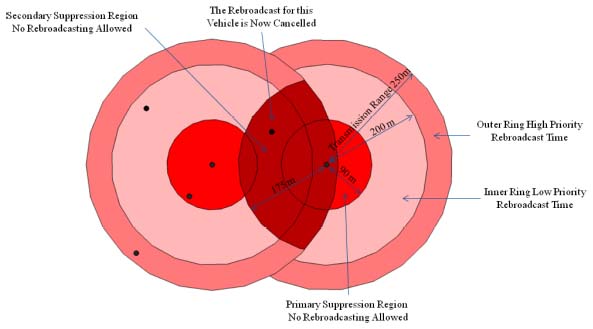
Figure 4 Vehicle in large suppression range cancels rebroadcast.
Figure 6. Below shows a vehicle in the low priority time region performing its scheduled rebroadcast after all high priority vehicles finish their rebroadcasts.
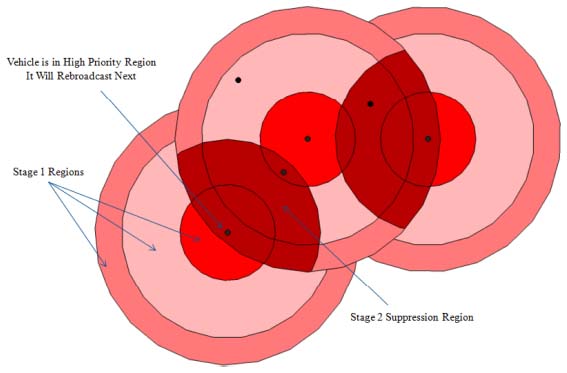
Figure 5 A vehicle rebroadcast in high priority region.
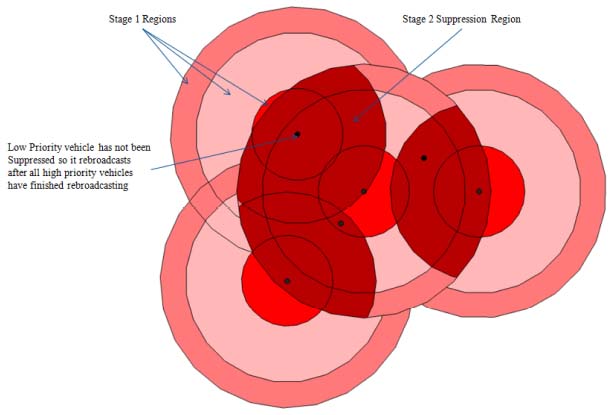
Figure 6 Vehicle rebroadcasting in low priority region.
The correlation between vehicle density ρ for 10–70 vehicles/km2 and optimum suppression range has been investigated using simulation. Equations 2, 3 and 4 are obtained using discrete estimation through intensive simulations by randomly generating vehicle density.
Table 2 Correlation between ρ and effective suppression range
| ρ | β | Corresponding Range in Meters |
| 1 < ρ < 40 | 28–175 | |
| 42 < ρ < 55 | 4 * ρ | 172–220 |
| ρ ≥ 56 | 225 | 225 |
Let β denote the large suppression range in meters then
| (2) |
| (3) |
| (4) |
Where ρ: is the vehicle density in vehicles/km2.
Table 2 below shows a summary of the suppression range as a function of vehicle density along with corresponding range in meters.
The proposed scheme uses the large suppression range of 175 m in the second phase of the protocol based on the results in Table 2. Another reason for choosing the large suppression range is that the probability of a vehicle being in the 200–250 m range is about 0.36. This means there is a 36% probability of a vehicle being in that range, assuming uniform distribution of vehicles on the road.
4 Performance Evaluation and Analysis
4.1 Simulation Parameters and Performance Metrics
A MATLAB simulation package is used to analyze the performance of the proposed SNR-based dynamic suppression broadcast scheme. Each reading in all scenarios is the average of 10 runs. The road model in this study is a map consisting of horizontal and vertical streets. This is chosen to be consistent with the Manhattan mobility model adopted.
The free space path loss (FSPL) model is used in this study [57, 66]. The path loss of the wireless link is given by (5):
| (5) |
si is the distant between transmitter and receiver
| (6) |
| (7) |
Table 3 Simulation parameters
| Parameter | Value |
| Transmission Range | 250 m |
| Simulation Time | 300s (total) |
| Region size | 2000 m × 1000 m |
| Number of vehicles | 20–120 |
| Packet size | 256 bytes |
| MAC protocol | 802.11p |
| Mobility Model | Manhattan |
| Speed | Uniform between 5–15 m/s |
| Pause time | 0s |
K2 is the path loss exponent,
λ0 is the carrier wavelength
c is the speed of light and f0 is the carrier frequency, Gt is the antenna gains of the transmitter, Gr is the antenna gains of the receiver.
The ratio of received to transmitted power is given by
| (8) |
is the product of the transmit and receive antenna field radiation.
At the MAC layer, the back-off time is implemented to avoid packet collisions and is determined by (9)
| (9) |
w: is the contention window size and σ is the duration of a back-off slot time. It’s worth noting that in IEEE 802.11p broadcast mode there is no retransmission or acknowledgement.
The rest of the simulation environment parameters are summarized in Table 3.
The following metrics are considered in the evaluation of the proposed broadcast scheme.
- Reachability: percentage of vehicles that received an EWM.
- Percentage of rebroadcasts: percentage of vehicles that rebroadcast a received EWM.
- Number of rebroadcasts: number of vehicles that rebroadcast a received EWM
- End to End delay: the average time from when an EWM is sent due to an emergency situation to the time when the EWM delivered to all reachable vehicles.
The following algorithms will be compared to evaluate the proposed broadcast scheme.
- Small suppression range; any vehicle within the small suppression range (i.e. 90 m) of the broadcast source/forwarding node will not rebroadcast the message. All other vehicles receiving a message will rebroadcast the message.
- Fixed suppression ranges; the algorithm uses the small and the large suppression ranges of 90 and 175 meters respectively. This algorithm does not need any additional equipment except for the transmitter and receiver.
- SNR-based dynamic suppression broadcast scheme: the assumption is all vehicles are equipped with GPS.
- Flooding: each vehicle receiving a message will rebroadcast it.
5 Results and Discussion
The percentage of vehicles receiving the EWM as a function of vehicle density is shown in Figure 7. The graph shows that the adaptive and dynamic version of the proposed scheme outperforms the other three schemes, with a much lower cost in the number of rebroadcasts and network resource usage. Furthermore, the proposed dynamic suppression broadcast scheme maintains the same reachability, while flooding degrades it significantly, by about 20% as the number of vehicles increases to 140. The percentage of vehicles receiving the EWM degrades for other schemes as well. As vehicle density increases, fewer vehicles need to participate in rebroadcasting the EWM, the contention at the MAC layer will increase and so does the number of collisions.
The reachability above vehicle density of 60 is 100%. This is due to the fact that in low density scenarios, vehicles will have a higher probability to rebroadcast as the suppression decreases between vehicles, versus in high density scenarios where suppression increases (i.e. fewer vehicles need to retransmit). This shows that the proposed scheme is very efficient in maintaining connectivity which is crucial for disseminating EWMs.
Figure 8 shows the percentage of rebroadcasts vs. vehicle density. In this figure it is clear that the proposed dynamic suppression broadcast scheme outperforms the flooding broadcast scheme by about 80% and the small suppression range by about 30% in a high density network. This significant difference is a result of the fact that the dynamic proposed scheme utilizes the value of the SNR and vehicle density to determine whether to rebroadcast or not, translating into many fewer rebroadcasts of the received EWM.
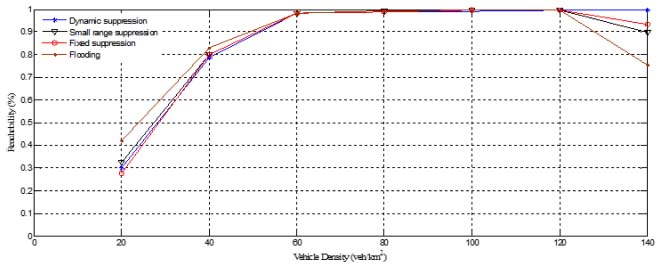
Figure 7 Reachability vs. vehicle density.
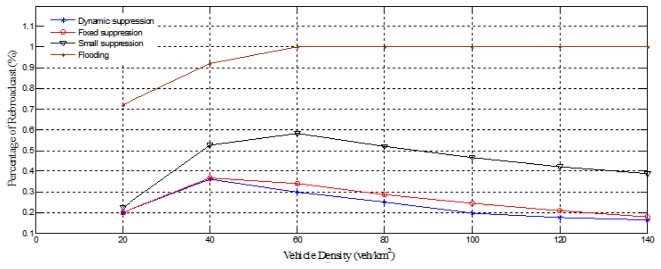
Figure 8 Percentage of rebroadcasts vs. vehicle density.
Reachability versus suppression range for different vehicle densities (ρ) is illustrated in Figure 9. It can be seen in the figure that as the vehicle density increases, the suppression range can also increase without compromising the reachability or the connectivity of the VANET. When vehicle density is 30 or more, the suppression range can increase up to 175 meters with minimum reachability of around 80%, with a maximum reachability of 100% when the density is 50 vehicles per km2. This confirms the large suppression range in the formula devised for choosing this range as well as dividing the transmission range into different priority zones as in Table 2.
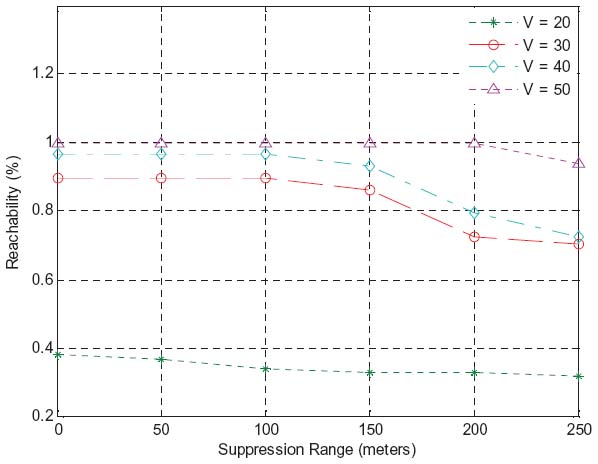
Figure 9 Reachability vs. suppression range for different ρ.
Figure 10 shows the number of rebroadcasts versus suppression range for different ρ. This figure is related to Figure 9, to achieve the presented reachability. For vehicle density ρ = 40 v/km2, to disseminate the EWM to 85% of all vehicles in a map of size 2 km by 1 km, only 35% of vehicles are sufficient to rebroadcast for a suppression range of 175m. When the vehicle density increases (i.e. ρ = 50 v/km2), only 40% of vehicles in the map need to rebroadcast to achieve 100% coverage (i.e. 100% reachability).
Figure 11 shows that the proposed dynamic suppression technique has the lowest delay compared to the small, fixed suppression algorithms and the flooding broadcast scheme. At low density (i.e. 20 v/km2) the proposed scheme has the same delay, but as the vehicle density increases, the delay of the dynamic suppression scheme increases, but at much lower rate than other broadcasting techniques. Flooding clearly suffers from longer delays as the node density increases. This is due to MAC layer longer access times and the number of collisions. On the other hand, not all vehicles in the dynamic scheme are trying to access the channel simultaneously due to the high and low priority times given to them based on their locations. Furthermore, as vehicle density increases, fewer vehicles need to rebroadcast the EWM. Hence the channel access time is very short. Also, because of the priority times assigned to vehicles of no more than 90 msec, the proposed scheme minimizes delay by indirectly keeping bound on the delay.
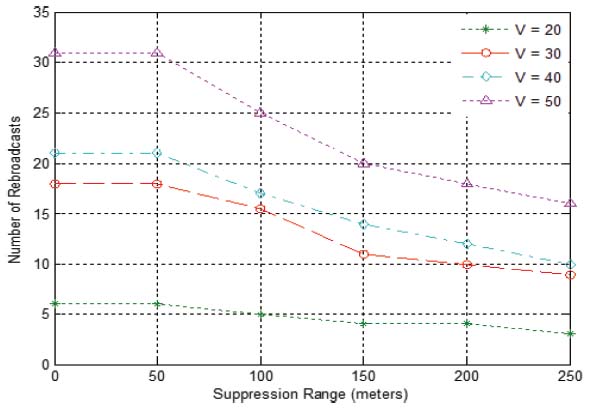
Figure 10 Number of rebroadcasts vs. suppression range for different ρ.
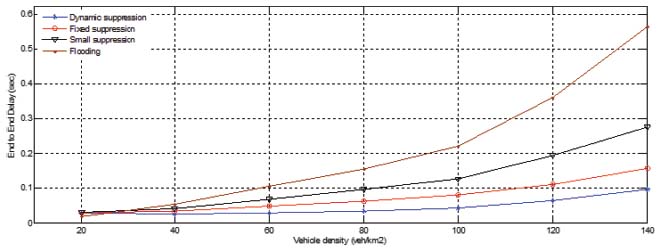
Figure 11 Vehicle density vs. end to end delay.
6 Conclusion and Future Work
The most crucial application of VANETs is safety. One of these applications is dissemination of EWMs. A broadcast scheme is needed and used to achieve this purpose. The broadcast scheme must be efficient, effective, minimize latency and resource usage (i.e. bandwidth, battery, processing power, buffer space) and yet not be complex.
This paper proposed a new SNR-based dynamic suppression broadcast scheme with an effective suppression range which is validated via simulations. The scheme is efficient, and reliable in terms of reachability and reducing network resources consumption. Moreover, it reduces the percentage of rebroadcasts of an EWM, and decreases end to end delay, under 100 msec, in high density scenarios which is compliant with safety applications.
The proposed scheme achieved almost 100% reachability (i.e. the EWM reaches every vehicle in the network) while minimizing the number of rebroadcasts. In addition, it reduces contention at the MAC layer and does not overload the network with unnecessary rebroadcasts. The overall result is alleviating the broadcast storm problem in VANETs and disseminating the early warning message within the time frame needed for safety applications.
The next step in this study is to compare the devised scheme with other broadcast routing protocols in VANETs discussed in Section 2.2. Some of these broadcast routing protocols would be Urban Multi-hop Broadcast (UMB), Ad hoc Multihop Broadcast (AMB), and Congestion Aware-Greedy Perimeter Coordinator Routing (CA-GPCR). A formal statistical analysis will be conducted for the protocols under study. Moreover, a more realistic channel model such as Rayleigh fading model will be used. In addition, the mobility model will be the random waypoint, or Gauss-Markov.
References
[1] Togou, M.A., Hafid, A., and Khoukhi, L. (2016). SCRP: Stable CDS-Based Routing Protocol for Urban Vehicular Ad Hoc Networks. In IEEE Transactions on Intelligent Transportation Systems, 17(5), 1298–1307.
[2] Lee P.H., and Huang, T.C. (2014). An Improved Distance-Based Scheme for Broadcast Storm Suppression in VANETs. 2014 9th IEEE International Conference on Networking, Architecture, and Storage. Tianjin, 200–206.
[3] Torrent-Moreno, M., Killat, M. and Hartenstein, H. (2005). The challenges of robust inter-vehicle communications. 2005 IEEE 62nd Vehicular Technology Conference (VTC-2005-Fall), 319–323.
[4] Kim, T.H., Hong, W.K., Kim, H.C., and Lee, Y.D. (2008). An Effective Data Dissemination in Vehicular Ad-Hoc Network. In: Vazão T., Freire M.M., Chong I. (eds.) Information Networking. Towards Ubiquitous Networking and Services. ICOIN 2007. Springer, Berlin, Heidelberg, vol. 5200, 295–304.
[5] Patel, N.S., and Singh, S. (2016). A survey on techniques for collision prevention in VANET. In 2016 International Conference on Wireless Communications, Signal Processing and Networking (WiSPNET), Chennai, 1663–1666.
[6] Vegni, A.M., Stramacci, A., and Natalizio, E. (2012). SRB: A Selective Reliable Broadcast protocol for safety applications in VANETs. In 2012 International Conference on Selected Topics in Mobile and Wireless Networking, Avignon, 89–94.
[7] Awang, A., Husain, K., Kamel, N., Aissa, S. (2017). Routing in Vehicular Ad-hoc Networks: A Survey on Single and Cross-layer Design Techniques, and Perspectives. In IEEE Access, 5, 9497–9517.
[8] Nithya Darisini, P.S. and Kumari, N.S. (2013). A survey of routing protocols for VANET in urban scenarios. In 2013 International Conference on Pattern Recognition, Informatics and Mobile Engineering, Salem, 464–467.
[9] Kanimozhi, V., and Karthik, S. (2017). A survey on multi-constrained optimal path selection schemes and authentication schemes for VANET. In 2017 11th International Conference on Intelligent Systems and Control (ISCO). Coimbatore, 25–29.
[10] Hartenstein, H., and Laberteaux, L.P. (2008). A tutorial survey on vehicular ad hoc networks. In IEEE Communications Magazine, 46(6), 164–171.
[11] Korkmaz, G., Ekici, E., Özgüner, F., Özgüner, Ü. (2004). Urban multi-hop broadcast protocol for inter-vehicle communication systems. In Proceedings of the 1st ACM International Workshop on Vehicular Ad Hoc Networks (VANET ’04), Philadelphia, PA, USA 76–85.
[12] Lin, D., Kang, J., Squicciarini, A., Wu, Y., Gurung, S., and Tonguz, O. (2017). MoZo: A Moving Zone Based Routing Protocol Using Pure V2V Communication in VANETs. In IEEE Transactions on Mobile Computing, 16(5), 1357–1370.
[13] Karagiannis, G., Altintas, O., Ekici, E., Heijenk, G., Jarupan, B., Lin, K., and Weil, T. (2011). Vehicular Networking: A Survey and Tutorial on Requirements, Architectures, Challenges, Standards and Solutions. IEEE Communication Surveys Tutorials, 13(4), 584–616.
[14] Mak, T., Xu, Q., Ko, J., Sengupta, R. (2004). Vehicle-to-Vehicle Safety Messaging in DSRC. In International Conference on Mobile Computing and Networking, 2004.
[15] Paolo, S., Hannes, H., Marc, T. (2005). Fair sharing of bandwidth in VANETs. Proceedings of the 2nd ACM International Workshop on Vehicular Ad Hoc Networks Cologne, Germany, 49–58.
[16] Patel, N.S., and Singh, S. (2016). A survey on techniques for collision prevention in VANET. In 2016 International Conference on Wireless Communications, Signal Processing and Networking (WiSPNET), Chennai, 1663–1666.
[17] Chen, R., Jin, W.L., and Regan, A. (2010). Broadcasting safety information in vehicular networks: issues and approaches. In IEEE Network, 24(1), 20–25.
[18] Wang, C.D. and Thompson, J.P. (1997). Apparatus and method for motion detection and tracking of objects in a region for collision avoidance utilizing a real-time adaptive probabilistic neural network. US. Patent No. 5,613,039.
[19] Yang X. et al. (2004). A Vehicle-to-Vehicle Communication Protocol for Cooperative Collision Warning. Proc. 1st Annual Int’l. Conf. Mobile and Ubiquitous Systems: Networking and Services.
[20] National Center for Statistics and Analysis. (2004). Traffic Safety Facts 2003 Report DOT HS 809 767, National Highway Traffic Safety Admin., U.S. DOT.
[21] Kumar, S. and Verma, A.K. (2015). Position Based Routing Protocols in VANET: A Survey. Wireless Pers. Communications, 83(4), 2747– 2772.
[22] Liu, J., Wan J., Wang, Q., Deng, P., Zhou, K., and Qiao, Y. (2016). A survey on position-based routing for vehicular ad hoc networks. Telecommunication Systems, 62(1), 15–30.
[23] Panichpapiboon, S. and Pattara-Atikom, W. (2012). A Review of Information Dissemination Protocols for Vehicular Ad Hoc Networks. IEEE Communications Surveys Tutorial, 14(3), 784–798.
[24] Jarupan, B., and Ekici, E. (2011). A survey of cross-layer design for VANETs. Ad Hoc Network, 9(5), 966–983.
[25] Fu, B., Xiao, Y., Deng, H. J. and Zeng, H. (2014). A survey of cross-layer designs in wireless networks. IEEE Communications Surveys Tutorials, 16(1), 110–126.
[26] Limouchi, E. and Mahgoub, I. (2016). Intelligent hybrid adaptive broadcast for VANET. In IEEE 7th Annual Ubiquitous Computing, Electronics & Mobile Communication Conference (UEMCON), 1–7.
[27] Madsen, T.K., Fitzek, F.H.P., Prasad, R. (2005). Connectivity probability of wireless ad hoc networks: Definition, evaluation, comparison. Wireless Personal Communications, 35(2), 135–151.
[28] Virdaus, I.K., Kang, Shin, S., and Kwon, G.R. (2015). A simulation study: Is the broadcast storming really harmful for emergency delivery in VANETs. In 2015 International Conference on Advanced Technologies for Communications (ATC), 666–670.
[29] Hajlaoui, R., Guyennet, H. and Moulahi, T. (2016). A Survey on Heuristic-Based Routing Methods in Vehicular Ad-Hoc Network: Technical Challenges and Future Trends. In IEEE Sensors Journal, 16(17), 6782–6792.
[30] Tonguz, O., Wisitpongphan, N., Bai, F., Mudalige, P., and Sadekar, V. (2007). Broadcasting in VANET. In Proc. of Mobile Networking for Vehicular Environments, 7–12.
[31] Wisitpongphan, N., Tonguz, O., Parikh, J., Mudalige, P., Bai, F., and Sadekar, V. (2007). Broadcast storm mitigation techniques in vehicular Ad hoc networks. IEEE Wireless Communications, 14, 84–94.
[32] Tseng, Y.-C., Ni, S.-Y. and Shih, E.-U. (2003). Adaptive approaches to relieving broadcast storms in a wireless multihop mobile ad hoc network. In IEEE Transactions on Computers, 52(5), 545–557.
[33] Gandhi, A.M. and Parthasarathy, S. (2008). Minimizing Broadcast Latency and Redundancy in Ad Hoc Networks. In IEEE/ACM Transactions on Networking, 16(4), 840–851.
[34] Hajlaoui, R., Hervé G., and Moulahi, T. (2016). A Survey on Heuristic-Based Routing Methods in Vehicular Ad-Hoc Network: Technical Challenges and Future Trends. IEEE Sensors Journal, 16(17).
[35] Tonguz, O.K., Wisitpongphan, N., and Parikh, J.S. (2006). On the Broadcast Storm Problem in Ad hoc Wireless Networks. In 3rd International Conference on Broadband Communications, Networks and Systems, 1–11.
[36] Tseng, Y., Ni, S., Chen, Y., and Sheu, J. (2002). The broadcast storm problem in a mobile ad hoc network. In Wireless Networks, 8(3), 153–167.
[37] Korkmaz, G., Eylem E., Fusun O. (2007). Black-Burst- Based Multihop Broadcast Protocols for Vehicular Networks. In IEEE Transactions on Vehicular Technology, 5(56).
[38] Torrent-Moreno, M. (2007). Inter-vehicle communications: assessing information dissemination under safety constraints. In Wireless on Demand Network Systems and Services Conference, 59–64.
[39] Ibrahim, K., Weigle, M.C. and Abuelela, M. (2009). P-IVG: Probabilistic Inter-Vehicle Geocast for Dense Vehicular Networks. In IEEE 69th Vehicular Technology Conference, 1–5.
[40] Chen, J., Lai, C., Meng, X., Xu, J. and Hu, H. (2007). Clustering moving objects in spatial networks. In Proc. Int. Conf. Database Syst. Adv. Appl., 611–623.
[41] Shea, C., Hassanabadi, B., and Valaee, S. (2009). Mobility-based clustering in VANETs using affinity propagation. In Proc. IEEE Global Telecommunications Conf., 1–6.
[42] Min-Te, S., Feng, W., Lai, Y., Yamada, K., Okada, H. and Fujimura, K. (2000). GPS-based message broadcast for adaptive inter-vehicle communications. In Vehicular Technology Conference, 6, 2685–2692.
[43] Korkmaz, G., Ekici, E., and Ozguner, F. (2007). Black-Burst-Based Multihop Broadcast Protocols for Vehicular Networks. In IEEE Transactions on Vehicular Technology, 56(5), 3159–3167.
[44] Yang, S.R., Hung, W.-H. (2008). Efficient selection of relay vehicles for broadcasting on vehicular ad-hoc networks. In Mobility ’08 Proceedings of in International Conference on Mobile Technology, Applications, and Systems, 55.
[45] Korkmaz, G., Ekici, E. and Ozguner, F. (2006). An Efficient Fully Ad-Hoc Multi-Hop Broadcast Protocol for Inter-Vehicular Communication Systems. In IEEE International Conference on Communications, 423–428.
[46] Chen, W., Guha, R.K., Kwon, T., Lee, J. and Hsu, I.Y. (2008). A survey and challenges in routing and data dissemination in vehicular ad-hoc networks. In IEEE International Conference on Vehicular Electronics and Safety, 328–333.
[47] Min, S., Feng, W., Lai, T., Yamada, K., Okada, H. and Fujimura, K. (2000). GPS-based message broadcasting for inter-vehicle communication. In International Conference on Parallel Processing, 279–286.
[48] Mariyasagayam, M.N., Osafune, T. and Lenardi, M. (2007). Enhanced Multi-Hop Vehicular Broadcast (MHVB) for Active Safety Applications. In 7th International Conference on ITS Telecommunications, 1–6.
[49] Blum, J.J., Eskandarian, A. and Hoffman, L.J. (2004). Challenges of intervehicle ad hoc networks. In IEEE Transactions on Intelligent Transportation Systems, 5(4), 347–351.
[50] Obaidat, M., Ali, M., Shahwan, I., Obeidat, S. and Toce, A. (2014). Dynamic suppression broadcast scheme for vehicle adhoc networks (VANET). In 10th International Conference on Wireless Communications, Networking and Mobile Computing, 589–592.
[51] www.Opnet.com
[52] Tian, D., et al. (2018). A Distributed Position-Based Protocol for Emergency Messages Broadcasting in Vehicular Ad Hoc Networks. In IEEE Internet of Things Journal, 5(2), 1218–1227.
[53] Chou, Y., Chu, T., Kuo, S. and Chen, C. (2018). An Adaptive Emergency Broadcast Strategy for Vehicular Ad Hoc Networks. In IEEE Sensors Journal, 18(12), 4814–4821.
[54] Devangavi, A.D. and Gupta, R. (2017). “Routing protocols in VANET — A survey,” 2017 International Conference On Smart Technologies For Smart Nation (SmartTechCon), Bangalore, pp. 163–167.
[55] Ahamed, A. and Vakilzadian, H. (2018). “Issues and Challenges in VANET Routing Protocols,” 2018 IEEE International Conference on Electro/Information Technology (EIT), Rochester, MI, pp. 0723–0728.
[56] Tonguz, O.K., Wisitpongphan, N. and Bai, F. (2010). “DV-CAST: A distributed vehicular broadcast protocol for vehicular ad hoc networks,” In IEEE Wireless Communications, vol. 17, no. 2, pp. 47–57, April 2010.
[57] Goldsmith, A. (2004). Wireless Communications. Stanford, CA, USA: Stanford Univ., pp. 24–38.
[58] Dong, W., Lin, F., Zhang, H. and Yin, Y. (2017). “A cluster-based recursive broadcast routing algorithm to propagate emergency messages in city VANETs,” 2017 IEEE 9th International Conference on Communication Software and Networks (ICCSN), Guangzhou, pp. 187–190.
[59] Liu, X., Hu, B., Wei, Z. and Zhu, Z. (2017). “A congestion-aware GPCR routing protocol for vehicular ad-hoc network in urban scenarios,” 2017 IEEE 9th International Conference on Communication Software and Networks (ICCSN), Guangzhou, pp. 166–170.
[60] Ruiz, P. and Bouvry, P. (2015). Survey on Broadcast Algorithms for Mobile Ad Hoc Networks. In ACM Computing Surveys, vol. 48, no. 1, Article 8, Publication date: July 2015.
[61] Chaqfeh, M., Lakas, A. and Jawhar, I. (2015). A survey on data dissemination in vehicular ad hoc networks. Elsevier, Vehicular Communications. volume 1, issue 4, October 2014, Pages 214–225.
[62] Eichler, S., Schroth, C., Kosch, T., and Strassberger, M. (2006). Strategies for context-adaptive message dissemination in vehicular ad hoc networks. Proceedings of the 2nd International Workshop on Vehicle-to-Vehicle Communications, V2VCOM (2006).
[63] Reina, D.G., Günesb, M. and Toral, S.L. (2016). Real experimentation of probabilistic broadcasting algorithms based on dissimilarity metrics for multi-hop ad hoc networks. Ad Hoc Networks. volume 47, 1 September 2016, Pages 1–15.
[64] Reina, D.G., Toral, S.L., Johnson, P. and Barrero, F. (2015). A survey on probabilistic broadcast schemes for wireless ad hoc networks. Ad Hoc Networks, 25, 263–292.
[65] Zanella, A., Bazzi, A., Pasolini, G. and Masini, B.M. (2013). “On the Impact of Routing Strategies on the Interference of Ad Hoc Wireless Networks,” in IEEE Transactions on Communications, vol. 61, no. 10, pp. 4322–4333, October 2013.
[66] Rappaport, T.S. (2002). Wireless communications: Principles and practice. (2nd ed.) (Prentice Hall communications engineering and emerging technologies series). Upper Saddle River, N.J: Prentice Hall.
[67] Inam, M., Li, Z., Asghar, A. and Zahoor, A. (2019). “A Novel Protocol for Vehicle Cluster Formation and Vehicle Head Selection in Vehicular Ad-hoc Networks,” in I.J. of Electronics and Information Engineering, vol. 10, no. 2, pp. 103–119, June 2019.
[68] Jia, K., Hou, Y., Niu, K., Dong, C. and He, Z. (2019). “The Delay-Constraint Broadcast Combined With Resource Reservation Mechanism and Field Test in VANET,” in IEEE Access, vol. 7, pp. 59600–59612.
[69] Zhang, X.M., Yan, L., Zhang, H. and Sung, D.K. (2019). “A Concurrent Transmission Based Broadcast Scheme for Urban VANETs,” in IEEE Transactions on Mobile Computing, vol. 18, no. 1, pp. 1–12, 1 Jan. 2019.
[70] Pareek, S. and Shanmughasundaram, R. (2018). “Implementation of Broadcasting Protocol for Emergency Notification in Vehicular Ad hoc Network (VANET),” 2018 Second International Conference on Intelligent Computing and Control Systems (ICICCS), Madurai, India, pp. 1032–1037.
[71] Selvi, M. and Ramakrishnan, B. (2018). “An Efficient Message Prioritization and Scheduled Partitioning Technique for Emergency Message Broadcasting in VANET,” 2018 3rd International Conference on Communication and Electronics Systems (ICCES), Coimbatore, India, pp. 776–781.
[72] Chou, Y., Chu, T., Kuo, S. and Chen, C. (2018). “An Adaptive Emergency Broadcast Strategy for Vehicular Ad Hoc Networks,” In IEEE Sensors Journal, vol. 18, no. 12, pp. 4814–4821, 15 June 15.
[73] Limouchi, E. and Mahgoub, I. “Volunteers Dilemma Game Inspired Broadcast Scheme for Vehicular Ad Hoc Networks,” in IEEE Transactions on Intelligent Transportation Systems.
Biographies

Muath Obaidat is an Assistant Professor of Computer Science and Information Security at John Jay College of Criminal Justice of the City University of New York. He received his Ph.D. in Electrical Engineering from The Department of Electrical Engineering at the Graduate Center of the City University of New York. He has MS in computer engineering from NJIT and computer science degree from Monmouth University.
He has many scientific article publications in journals and respected conference proceedings. His research interests lie in the area of digital forensics, ubiquitous Internet of Things (IoT) security and privacy. His recent research crosscuts the areas 5G architectures and protocols, cloud computing and security. He serves on multiple conferences and workshop program and organizing committees. In addition, he is a peer reviewer for many International journals.

Ihsasn Shahwan earned his Ph.D. in Electrical Engineering from City College of New York. He worked as Cloud Networking and Infrastructure Engineer. He has extensive experience in SDNs, VFN, Layers 1/2/3 G/MPLS-based VPNs, Architecture design of OSSs for IP/MPLS/GMPLS Optical networks, Next Generation data-centric Networking Technologies and Architectures, Traffic Engineering, Carrier-Grade Ethernet networking technology and architecture. In addition, he has several conference proceedings and journal papers.

Ahmed Hassebo is a Ph.D. candidate at the department of Electrical Engineering from the City University of New York. He earned his BS and MS both in Electrical Engineering from Egypt. His research interest is in the area of 5G-based Converged Electric Power Grid, scheduling in IoT and smart grid applications. He has several publications in the area of his research interest.

Suhaib Obeidat received his Ph.D degree from Arizona State University in Computer Science. He finished MS in Computer Science from Monmouth University. He joined the Department of Computer Science at Bloomfield College in 2014 as the coordinator of the Network Engineering program. His main research interests are in the area of Wireless Networks, bandwidth allocation in 5G networks and cyber security and education.

Mohamed Ali received his Ph.D. degree in electrical engineering from the City College of the City University of New York in 1989. He joined the faculty of electrical engineering at the City College of New York in 1989 where he is currently a Professor. Since 1995 he has been an IT Consultant for several major telecom carriers in the USA.
He has published over 140 refereed journal papers, invited talks, conference proceedings, and several book chapters. His current research interests include Next-Generation Fixed-Mobile broadband access technologies, PON-based broadband access networks, WDM-based Optical Networking and architecture, Ethernet Networking Technologies and switching, 5G networks, IoT for mission critical applications. Ali has received the NSF Faculty Early Career Development Award among others.

Matluba Khodjaeva is an Assistant Professor in the Department of Mathematics and Computer Science at John Jay College of Criminal Justice, Graduate Faculty in the Digital Forensics and Cyber Security program and Doctoral faculty of Computer Science at the Graduate Center of CUNY. Her research interests is in Cryptography, it mainly in the area of secure outsourcing computations to the cloud. Her Ph.D is from The Graduate Center, CUNY, 2017.
Journal of Mobile Multimedia, Vol. 15_3, 163–190.
doi: 10.13052/jmm1550-4646.1532
© 2020 River Publishers