Voice Controlled Comparator Improvement Based on Resource Utilization in SoC Ecosystem for Parking Assist System
Sethakarn Prongnuch1,* and Suchada Sitjongsataporn2
1Department of Robotics Engineering, Faculty of Industrial Technology, Suan Sunandha Rajabhat University, 1 U-Thong Nok Rd., Dusit, Bangkok, Thailand
2Department of Electronic Engineering, Mahanakorn Institute of Innovation (MII), Faculty of Engineering and Technology, Mahanakorn University of Technology, 140 Cheumsamphan Rd., Nongchok, Bangkok, Thailand
E-mail: sethakarn.pr@ssru.ac.th; ssuchada@mut.ac.th
*Corresponding Author
Received 09 August 2021; Accepted 11 January 2022; Publication 05 March 2022
Abstract
This paper introduces the voice controlled comparator improvement for maneuvering a miniature electric vehicle based on the resource utilization in the system-on-chip (SoC) ecosystem. An intelligent parking assist is to support the driver outside a car while parking in the crowded locations. Voice controlled improvement based on the resource utilization on the SoC ecosystem is modified to command for moving vehicle. The normalized cross correlation (NCC) technique is proposed for voice controlled system with low utilization on the SoC ecosystem. Hardware and software co-design by the Xilinx VIVADO and Vitis software are used to design on an ARM multicore processor and field programmable gate array (FPGA) system inside a ‘Zedboard’ development board. We perform the experiments for Thai command word recognition via Bluetooth using the proposed NCC method to identify the basic command stored on SD card in Zedboard. Empirical results show the voice controlled improvement based on the Pearson’s correlation coefficient (PCC), modified PCC and proposed NCC methods on a Zedboard. The resource utilization on Zedboard are less than as 17.57% in look-up table (LUT), 29.12% in look-up table random access memory (LUTRAM), 6.44% in flip-flop (FF) and 2.38% in input/output (I/O) as compared with a ZYBO system. An average execution time of Zedboard using proposed NCC method is less than PCC and modified PCC as 5.12%, 1%, respectively. Results of proposed NCC of Thai voice command controlled show the validate workability at average percentage accuracy at 90% in the outdoor environments.
Keywords: Voice controlled parking assist system, SoC development board, normalized cross correlation.
1 Introduction
According to the car accidents news while parking over the past decade around the world [1, 2], there was a brand-new car displayed on the second floor of showroom building that fell off the first floor by driver who pressed the accelerator instead of brake in Mumbai Mirror [1] and the uncontrolled car went off the top of the building and dangling by a wire after the driver broke through protective wires while parking on the roof in Texas [2]. In particular, a parking assist is designed to protect a driver from the accidentally fault the driver.
As stated by the automotive industry, an intelligent parking assist system is a well- known automatic parking system such as an advanced parking guidance system developed by Toyota Motor Corporation [3]. Automatic steering for parking around view monitor is developed by Nissan Motor Corporation [4]. These technologies can assist the drivers in parking their vehicles. There are various approaches to provide safe and comfortable parking applied for the advanced driver assistance system such as a vision-based system with visual sensing for driving assistance [5], a parking spot detection using a multi-clue recovery model to reconstruct parking spots [6], voice-controlled in reconfiguration embedded system [7, 8], robotic vehicle controlled by voice commands based on a Texas board [9], and idea of a low-cost autonomous vehicle controlled by voice commands [10]. In [7], this research has been intended to present a reconfigurable embedded system design by voice controlled parking assistance system for a prototype electric vehicle connected to a smartphone via Bluetooth. In [8], this work has been developed about the voice-based recognition by investigating a set of Thai male and female voice command signals for parking a prototype electric vehicle. In [11], the authors have presented how to identify a voiced command set of an unmanned aerial vehicle for the identification of information controlling signals.
Using the field programmable gate array (FPGAs) hardware, the system-on-chip (SoC) development boards are an embedded system including with software programmed a processor, which is the most interesting applications used as a prototyping platform in the recently digital world [12]. According to the increasing demand in the internet-of-thing (IoT) application, a SoC-based platform with an architecture optimization has been interested to reduce hardware usage in the healthcare application as an electrocardiogram (ECG) based identification [13]. For the real-time control systems, a field programmable system on chip (FPSoC) with the shared memory has been proposed for the real-time optical distortion correction [14]. As a perspective of single purpose system, an ARM-based SoC architecture with the Linux-based operating system has been implemented for the fast boot time and size optimization [15].
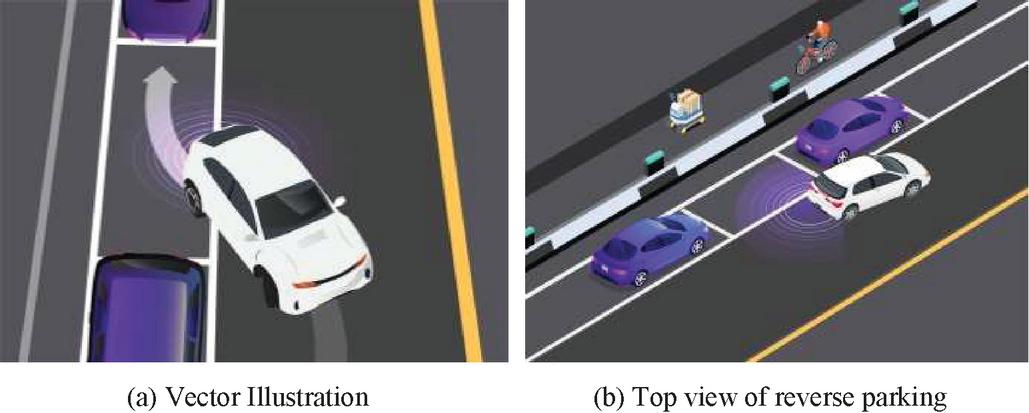
Figure 1 Reverse parallel parking.
For the driving safety, an idea of parking assist is to maneuver for the reverse parking when a driver controlling outside a car shown in Figure 1. In this paper, we propose the voice controlled comparator with low resource utilization on the ARM-based SoC system for parking assist system that consists of a communication system for receiving a set of voice commands to maneuver a car in the real time system. According to the previous works [7], a SoC development board as Zedboard will be deployed to achieve the maximum utilization on the SoC ecosystem in order to improve the resource utilization of a voice controlled comparator, which checks the input voice command compared with the reference pattern stored on a SD card in the prototype vehicle. The objective of this paper is to improve the voice controlled comparator in comparison with the voice command using the proposed normalized cross correlation (NCC) technique for voice controlled parking assistance with low utilization in the SoC ecosystem installed in a prototype miniature electric vehicle.
The paper is organized as follows. In Section 2, a SoC ecosystem development board is described briefly and Section 3 presents the proposed NCC method compared voice command and controlled for parking assistance on a SoC development board. In Section 4, the experimental results and performance are evaluated. Section 5 concludes the paper.
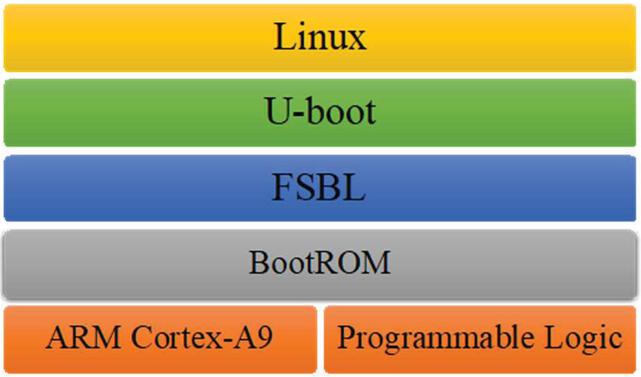
Figure 2 Components of SoC ecosystem [18].
2 SoC Ecosystem Development
In this section, we describe briefly about SoC ecosystem. As a perspective of single purpose system, a SoC development board include a central processing unit (CPU), memory, input/output ports and secondary storage. Based on the Xilinx software-defined system-on-chip (SDSoC) development environments [16], the Xilinx VIVADO 2019.2 HLx Edition [17] and Vitis software platform for a SoC ecosystem development board are designed with the embedded tools and runtime environments [18] using Xilinx Zynq-7000 SoC device including with the open-source operating systems and bare metal drivers, integrated development environments, and compilers, debuggers, and profiling tools. Figure 2 shows the SoC system components including Linux operating system, U-boot or universal-boot, the first stage bootloader (FSBL), bootROM is the write-protected flash embedded system inside the processor chip, and a SoC devices as an ARM cortex-A9 with programmable logic. Hardware and software co-design by the Xilinx VIVADO and Vitis software are used to design on an ARM multicore processor and field programmable gate array (FPGA) system inside a SoC development board. Xilinx VIVADO will be implemented the block system design of proposed system, synthesized and translated to a Hardware Description Language (HDL) implemented on FPGA in Zynq. Then, Vitis software platform will be written by C/C implemented on ARM processor in Zynq.
3 Proposed Voice Controlled Comparator-Based on Normalized Cross Correlation in SoC Development Board
In this section, we introduce the low computational voice controlled comparator for intelligent parking assist system. The proposed system consists of the hardware and software designed in a SoC development board, named ‘Zedboard’. The system architecture design includes with the five components as a Zedboard Zynq-7000 ARM/FPGA, a Bluetooth module, a motor, a servo motor, and sonar sensors shown in Figure 3.
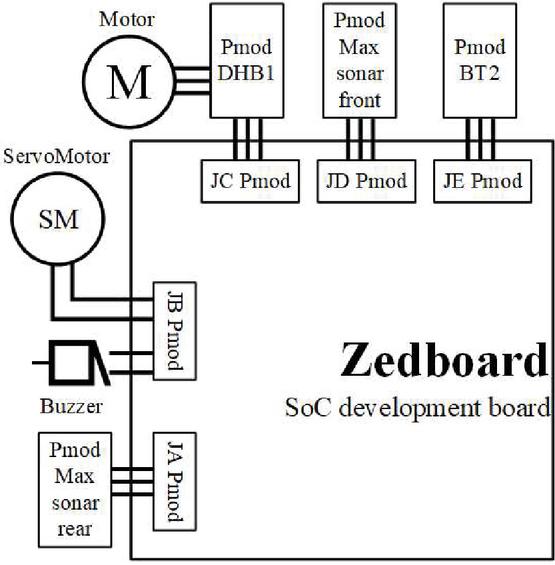
Figure 3 Overview of proposed SoC ecosystem design.
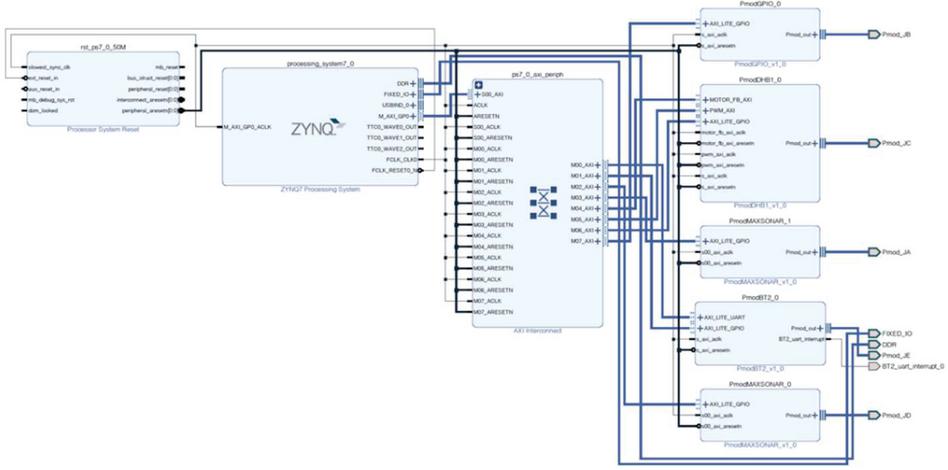
Figure 4 Proposed VIVADO HLx design architecture.
4 Hardware Design in SoC Development Board
Overview of hardware in a SoC development board system is shown in Figure 3, which composes of six hardware installations used as a Bluetooth device, a motor device, a buzzer, a servo motor, and 2-ultrasonic sensors. The procedure starts when the Bluetooth device collects the received voice command data, then it is responsible by sending the specific command data to other devices.
The proposed Xilinx VIVADO 2019.2 HLx design architecture is shown in Figure 4, which the block system design will be implemented, synthesized and translated to a HDL. Vitis software design platform in C/C language is implemented on FPGA areas inside a Zedboard, comprising of Zynq-7000 system for the interior usage combined with 2 processors as ARM multicore and system reset, Advanced eXtensible Interface (AXI) Interconnect, fixed input/output (I/O), double data rate dynamic random access memory (DDR RAM) and 6-hardware devices.
As stated in Figure 4, the SoC utilization on the Zedboard is summarized in Table 1 as follows: 3 percent of 53,200 look-up table (LUT) elements, 1 percent of 17,400 look-up table random access memory (LUTRAM), 2 percent of 106,400 flip-flops (FF), and 21 percent of 200 input/output (IO) pin count following by the proposed VIVADO HLx design architecture.
Table 1 SoC utilization
| LUT | LUTRAM | FF | IO |
| 3% | 1% | 2% | 21% |
Main Zedboard algorithm is designed to control the proposed a VIVADO HLx design architecture for the voice controlled parking assist system as shown in Table 2. Line 1 shows the initial devices as motor drive, buzzer, 2-ultrasonic sensors and Bluetooth device. Line 2 shows the voice command for maneuvering a vehicle as forward (FW), backward (BW), turning left (LEFT), turning right (RIGHT), neutral (READY) and STOP. Line 3 is the loop for the Zedboard communication system.
Table 2 SoC main algorithm
| 1: | INITIAL FUNCTION |
| PmodGPIO(motor drive,buzzer), PmodDHB1(), | |
| PmodMAXSONAR(), PmodBT2(), VoiceCMP() | |
| 2: | INITIAL Voice Commands[FW, BW, LEFT, |
| RIGHT, READY, STOP] | |
| 3: | FOR |
| 4: | PmodMAXSONAR() |
| 5: | PmodBT2() |
| 6: | VoiceCMP() |
| 7: | END FOR |
Table 3 PmodMAXSONAR function algorithm
| 1: | PmodMAXSONAR () |
| 2: | INPUT data (DEC) from 2-Ultrasonic Sensor |
| 3: | IF data (DEC) = 6 cm THEN |
| 4: | OUTPUT PmodGPIO (0,1) |
| 5: | END IF |
Table 4 PmodGPIO function algorithm
| 1: | SWITCH (a type of data motor drive is |
| 2’s COMPLEMENT, | |
| the type of data buzzer is BIT) | |
| 2: | CASE (1,0) |
| 3: | OUTPUT Motor Drive is Turn ON |
| and Rotate Forward | |
| 4: | OUTPUT Buzzer is Turn OFF |
| 5: | CASE (-1,0) |
| 6: | OUTPUT Motor Drive is Turn ON |
| and Rotate Backward | |
| 7: | OUTPUT Buzzer is Turn OFF |
| 8: | CASE (1,1) |
| 9: | OUTPUT Motor Drive is Turn ON |
| and Rotate Forward | |
| 10: | OUTPUT Buzzer is Turn ON |
| 11: | CASE (-1,1) |
| 12: | OUTPUT Motor Drive is Turn ON |
| and Rotate Backward | |
| 13: | OUTPUT Buzzer is Turn ON |
| 14: | END IF |
Ultrasonic sensors are installed at the front and rear of the prototype miniature electric vehicle at the vehicle bumpers, which is used a non-contact distance measurement. The received data from ultrasonic sensors in terms of the distance between the vehicle and obstacle, these sensors are transformed to a decimal number. If the distance is less than 6 cm, then an alarm of the buzzer will turn on.
The ultrasonic sensor function is proposed in Table 3. Line 1 shows the ultrasonic sensor and Line 2 shows the input data from 2-ultrasonic sensors at the front and rear of the vehicle bumpers in a decimal number. Lines 3–5 describe how to make the decision to stop a motor. If the distance between the car and the obstacle is less than 6 cm, then the buzzer will alarm immediately.
According to the driving system for the motor vehicles, the transmission shaft is controlled by the motor drive as moving forward and backward. Table 4 describes the function of driving system. Line 1 shows how to switch the output controlled the motor drive and buzzer. Lines 2–11 describe the 4 cases moving forward and backward and without alarm buzzer
Table 5 PmodBT2 function algorithm
| 1: | INPUT data (BYTE) |
| 2: | IF data (BYTE) 0 THEN |
| 3: | CONVERT data (BYTE) to CHAR |
| 4: | Data New Voice Commands[256] = CHAR |
| 5: | END IF |
Table 6 PmodDHB1 function algorithm
| 1: | INITIAL 3 States of Servo Motor (S1, S2, and S3) |
| 2: | INITIAL Delay = 1000ms |
| 3: | INPUT data (BITVECTOR) |
| 4: | IF data (BITVECTOR) == S1 THEN |
| 5: | OUTPUT Degree of Servo Motor = 0 |
| 6: | ELSE IF data (BITVECTOR) == S2 THEN |
| 7: | OUTPUT Degree of Servo Motor = 90 |
| 8: | ELSE IF data (BITVECTOR) == S3 THEN |
| 9: | OUTPUT Degree of Servo Motor = 90 |
| 10: | ELSE Degree of Servo Motor = 0 |
| 11: | END IF |
For receiving the voice command data, a voice interface through Bluetooth hardware is converted and sent the data to the parking assistance system shown in Table 5. Line 1 shows the input data. Lines 2–5 describe the condition to convert the voice data in byte into character.
For turning the vehicle, the servo motor is applied to maneuver the vehicle for turning left and right shown in Table 6. Line 1 is the initial of 3 states of servo motor and Line 2 sets the delay of motor. Line 3 describes the input data in the bit vector. Lines 4–11 show how to make a decision to control each state of servo motor, where the state ‘S1’ is ‘READY’, ‘S2’ state is turning ‘LEFT’ and ‘S3’ state is turning ‘RIGHT’, respectively.
Table 7 VoiceCMP function algorithm
| 1: | INPUT data New Voice Commands[256] |
| 2: | IF data New Voice Commands[256] == Voice |
| Commands[FW] THEN | |
| 3: | OUTPUT PmodGPIO (0,0) |
| 4: | ELSE IF data New Voice Commands[256] == Voice |
| Commands[BW] THEN | |
| 5: | OUTPUT PmodGPIO (1,0) |
| 6: | ELSE IF data New Voice Commands[256] == Voice |
| Commands[LEFT] THEN | |
| 7: | OUTPUT PmodGPIO (0,0) |
| 8: | OUTPUT PmodDHB1() = ‘S2’ |
| 9: | ELSE IF data New Voice Commands[256] == Voice |
| Commands[RIGHT] THEN | |
| 10: | OUTPUT PmodGPIO (0,0) |
| 11: | OUTPUT PmodDHB1() = ‘S3’ |
| 12: | ELSE IF data New Voice Commands[256] == Voice |
| Commands[READY] THEN | |
| 13: | OUTPUT PmodGPIO (0,0) |
| 14: | OUTPUT PmodDHB1() = ‘S1’ |
| 15: | ELSE data New Voice Commands[256] == Voice |
| Commands[STOP] | |
| 16: | OUTPUT PmodGPIO (0,0) |
| 17: | END IF |
For maneuvering a vehicle, a set of voice command patterns of owner consists of forward (FW), backward (BW), turning left (LEFT), turning right (RIGHT), neutral (READY) and STOP, which are stored on the SD card installed in a prototype car. The received voice command is compared with the stored command as shown in Table 7. Line 1 shows the input of receiving voice data. Lines 2–17 describe how to make a decision to compare the received voice data from Bluetooth device with the stored command. The results will be sent to control the servo motor detailed in Table 6 and the motor drive in Table 4 through the Bluetooth in Table 5, respectively.
5 Proposed Voice Controlled Comparator-based on Normalized Cross Correlation
Voice biometrics is the science of a unique identification characteristic using for a person’s voice [19]. Correlation coefficient can modify as the simple and robust voice biometrics engine to identify a voice command. This feature is applied in the isolation of a specific speaker’s voice in the noisy environment. The correlation coefficient is a linear correlation measured between two sets of data, which is the covariance of two variables divided by the product of their standard deviation [19]. In this paper, we propose how to improve the voice controlled comparator with the low computational based on correlation coefficient.
The correlation coefficient to a sample () can be obtained by substituting the estimates of their covariance and variance as [19]
| (1) |
where is a size of sample. and are the sample values indexed with . The parameters and are the sample mean of and , respectively as
| (2) |
Substituting Equation (2) into Equation (1) and rearranging, we get the Pearson’s correlation coefficient (PCC) as
It is noted that Equation (3) can be calculated the sample correlation depending on the number of sample involved, that can be numerically unstable. So, the modified PCC ( can be rewritten from Equation (3) as
| (4) |
where and are defined in Equation (2).
Following [18], we introduce the idea of template matching applied to search the relation between the owner’s voice template and its corresponding sample. According to measure the similarity, the proposed low computational normalized cross correlation (NCC) coefficient is introduced as
| (5) |
where and are defined as an owner’s voice and a user’s voice, respectively.
It is found that the correlation coefficient can be computed from the sample voice data in order to measure the strength and direction of a relationship between two variables. The value of correlation coefficient is between 0 and 1. That means if the value is equal to zero, there is no relationship between the predicted values and the actual values. As the strength of the relationship between the predicted values and actual value increases and closes to one, so does the correlation coefficient. In this research, the correlation coefficient is used for the measurement model, where the input of receiving voice data from Bluetooth device will be compared with the stored command and the results will be sent to control the servo motor as detailed in Table 7.
6 Experimental Results and Performance
The extensive experiments show the performance of proposed voice identification based on Pearson’s correlation coefficient (PCC), modified PCC (mPCC) and normalized cross correlation (NCC) coefficient for the intelligent parking assist system and hardware implementations on a Zedboard development board. The average execution time of proposed NCC method is compared with the PCC, modified PCC. The resource utilization of Zedboard for the design architecture of proposed system is investigated. Experimental results of PCC, modified PCC and proposed NCC on the voice controlled comparator for a set of basic Thai commands by Thai native speakers are tested. Accuracies of basic Thai voice commands is examined following the PCC, modified PCC and proposed NCC.
A Zedboard on the SoC ecosystem for installation has been deployed on a 234 434 mm scale miniature electric vehicle as shown in Figure 5. The prototype electric vehicle is illustrated in Figure 5(a). Zedboard implementation inside the prototype electric vehicle is depicted in Figure 5(b). The properties of the prototype electric vehicle are as follows. The type of motor is the DC motor gear, the maximum gross vehicle weight is about 1.75 kg, the curb weight is about 1.38 kg, the wheelbase is 257 mm, the radius of turning wheel is 22 mm, the type of tire is rubber and the size of front/rear wheel is 163/161 mm. Parameters are used for the voice identification as the length of Thai female and male voice data is about 1 second per sample, and the sampling frequency is about 44.1 kHz WAV file format.
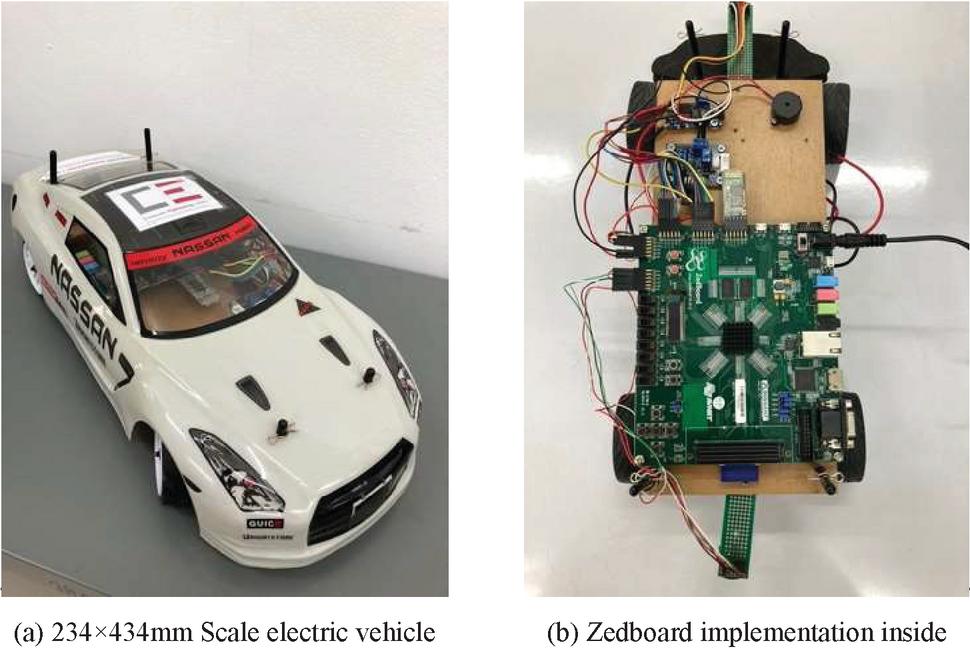
Figure 5 SoC development board for installation on small-scale electric vehicle.
According to the experiment operation, Thai voice commands by native Thai speaker consist of 6 basic commands for proposed parking assist system as “ ”/ “GO”, “
”/ “GO”, “ ” / “BACK”, “
” / “BACK”, “ ”/ “RIGHT”, “
”/ “RIGHT”, “ ” /“LEFT”, “
” /“LEFT”, “ ”/“READY” and “
”/“READY” and “ ”/“STOP”, respectively. Based on the correlation coefficient as the Pearson’s correlation coefficient () defined in Equation (3), modified Pearson’s correlation coefficient () in Equation (4) and proposed normalized cross correlation coefficient () in Equation (5) are implemented to identify the received Thai male and female voice commands in the outdoor environment compared with the reference Thai owner’s voice commands stored on the SD-card in the Zedboard inside vehicle.
”/“STOP”, respectively. Based on the correlation coefficient as the Pearson’s correlation coefficient () defined in Equation (3), modified Pearson’s correlation coefficient () in Equation (4) and proposed normalized cross correlation coefficient () in Equation (5) are implemented to identify the received Thai male and female voice commands in the outdoor environment compared with the reference Thai owner’s voice commands stored on the SD-card in the Zedboard inside vehicle.
Additionally, the previous system [7] has been used two processing boards, including the ZYBO board and Arduino board. As a perspective of single purpose system, a SoC development board include a central processing unit (CPU), memory, input/output ports and secondary storage. In this paper, the objective is to optimize the resource utilization on a SoC development board as: Zedboard using the proposed normalized cross correlation (NCC) in order to improve efficiently the voice controlled comparator and resource utilization on Zedboard for intelligent parking assist system.
Table 8 shows the resource utilization comparisons of two systems as: proposed Zedboard and previous system as ZYBO [7]. The resources of LUT, LUTRAM, FF, and I/O of a proposed Zedboard system are less than as 17.57% in LUT, 29.12% in LUTRAM, 6.44% in FF and 2.38% in I/O as compared with a previous ZYBO system [7].
Table 8 The comparisons of resource utilization
| System | LUT | LUTRAM | FF | IO |
| Zedboard | 1,716 | 73 | 2,149 | 41 |
| ZYBO [7] | 2,082 | 103 | 2,297 | 42 |
Table 9 Average execution time (seconds)
| System | in Equation (3) | in Equation (4) | in Equation (5) |
| Zedboard | 3.12 | 3.09 | 2.96 |
| ZYBO [7] | 3.33 | N/A | N/A |
Table 9 shows the average execution time in units of the second in comparison with two systems: Zedboard and previous ZYBO system [7]. The average execution time is the average time elapsed between the start and completion of a task. It is the time taken for affecting an algorithm. The average execution time of in Equation (3) of proposed Zedboard system is less than 6.30% compared with previous ZYBO system [7]. Additional, an average execution time of Zedboard of in Equation (5) is less than in Equation (3), and in Equation (4) as 5.12%, 1%, respectively.
Table 10 Results of proposed normalized cross correlation (NCC) coefficient for speaker identification from the received thai female commands compared with the reference thai female voice commands
| Correlation Coefficient Used | “” |
“” |
“” |
“” |
“” |
“” |
| in Equation (3) | 0.9959 | 0.9982 | 0.9577 | 0.9992 | 0.9917 | 0.9877 |
| in Equation (4) | 0.8501 | 0.8520 | 0.8175 | 0.8529 | 0.8465 | 0.8431 |
| in Equation (5) | 0.9959 | 0.9982 | 0.9577 | 0.9992 | 0.9917 | 0.9877 |
Experiments is tested the correlation coefficient-based voice controlled for the speaker identification from the received Thai female and male commands compared with the reference Thai female and male owner’s basic voice commands in the outdoor environments. Empirical results about correlation coefficient are shown in Tables 10–15. Table 10 depicts the correlation coefficient results for the speaker identification from the received Thai female commands compared with the reference Thai female voice commands stored on the SD-card in the Zedboard. It is seen that the correlation coefficient results of proposed low computational in Equation (5) following the basic Thai voice commands is close to results of in Equation (3) with the less execution time. This means that the design architecture of proposed system is implemented for the fast run-time and less resource usage.
Table 11 Results of correlation coefficient for speaker identification from the received thai male commands compared with the reference thai male voice commands
| Correlation Coefficient Used | “” |
“” |
“” |
“” |
“” |
“” |
| in Equation (3) | 0.9956 | 0.9467 | 0.9337 | 0.9949 | 0.9618 | 0.9997 |
| in Equation (4) | 0.8498 | 0.8080 | 0.8141 | 0.8492 | 0.8209 | 0.8533 |
| |in Equation (5) | 0.9956 | 0.9467 | 0.9337 | 0.9949 | 0.9618 | 0.9997 |
Table 12 Results of correlation coefficient for speaker identification from the received another thai female commands compared with the reference thai female voice commands
| Correlation Coefficient Used | “” |
“” |
“” |
“” |
“” |
“” |
| in Equation (3) | 0.9648 | 0.3474 | 0.0504 | 0.7234 | 0.9625 | 0.2273 |
| in Equation (4) | 0.8235 | 0.2965 | 0.0431 | 0.6175 | 0.8216 | 0.1940 |
| in Equation (5) | 0.9648 | 0.3474 | 0.0504 | 0.7234 | 0.9625 | 0.2273 |
For the Thai male voice command, Table 11 shows the correlation coefficient results from the received Thai male voice commands compared with the reference male voice commands. Results of proposed in Equation (5) and in Equation (3) for all Thai voice commands are higher than 93%. It is noticed that both results of proposed in Equation (5) and in Equation (3) for all Thai voice commands in Tables 10 and 11 are higher than 95%, while an average execution time of proposed in Equation (5) is lower than in Equation (3) as shown in Table 9.
Table 13 Results of correlation coefficient for speaker identification from the received another thai male commands compared with the reference thai male voice commands
| Correlation Coefficient Used | “” |
“” |
“” |
“” |
“” |
“” |
| in Equation (3) | 0.9503 | 0.5690 | 0.6108 | 0.1337 | 0.6739 | 0.1503 |
| in Equation (4) | 0.8283 | 0.4856 | 0.5214 | 0.1141 | 0.5752 | 0.1283 |
| in Equation (5) | 0.9503 | 0.5690 | 0.6108 | 0.1337 | 0.6739 | 0.1503 |
Table 14 Results of correlation coefficient for speaker identification from the received thai male commands compared with the reference thai female voice commands
| Correlation Coefficient Used | “” |
“” |
“” |
“” |
“” |
“” |
| in Equation (3) | 0.1709 | 0.0559 | 0.0469 | 0.2559 | 0.0587 | 0.0575 |
| in Equation (4) | 0.1459 | 0.0419 | 0.0401 | 0.2184 | 0.0501 | 0.0490 |
| in Equation (5) | 0.1709 | 0.0559 | 0.0469 | 0.2559 | 0.0587 | 0.0575 |
Table 15 Percentage accuracies of voice commands
| Correlation Coefficient Used | “” |
“” |
“” |
“” |
“” |
“” |
| in Equation (3) | 85% | 90% | 87% | 92% | 90% | 85% |
| in Equation (4) | 87% | 88% | 89% | 91% | 89% | 85% |
| in Equation (5) | 89% | 91% | 90% | 92% | 91% | 87% |
As tested with the same gender, Tables 12 and 13 shows the results of correlation coefficient from the received data compared with the same gender. Table 12 shows the results from the received another Thai female commands compared with the reference Thai female voice commands, while the results from both the “” and “” commands are shown in higher than 95%. Table 13 depicts the results of the received another Thai male commands compared with the reference Thai male voice commands in which the results from only the “” command is higher than 95%.
According to test with the different gender, the results of correlation coefficient for the speaker identification from the received Thai male commands compared with the reference Thai female voice commands in Table 14 are illustrated that the results of correlation coefficient from the received Thai male commands compared with the reference Thai female voice commands are lower than 25%. That means these commands in this situation cannot use the proposed parking assist system.
7 Conclusion
The resource utilization on a SoC development board has been presented for the proposed voice controlled comparator in the parking assist system using the proposed normalized cross correlation (NCC) coefficient. The proposed NCC method is applied to reduce the execution process time with low computational complexity compared with the Pearson’s correlation coefficient (PCC) and modified PCC. The proposed SoC ecosystem has been designed an embedded architecture on the Zedboard development board for maneuvering the prototype electric vehicle. The resource utilization on Zedboard development board are less than as 17.57% in LUT, 29.12% in LUTRAM, 6.44% in FF and 2.38% in I/O as compared with a ZYBO system. An average execution time of Zedboard using proposed NCC is less than PCC and modified PCC as 5.12%, 1%, respectively. The empirical results with the native Thai male and female speaker on the basic voice commands are shown using PCC, modified PCC and NCC for the Thai voice command controlled with the validate workability in the outdoor environment at the average percentage accuracies of proposed NCC, modified PCC and PCC of 90%, 88.16%, 88.16%, respectively. The correlation coefficient results of proposed low computational NCC method following the basic Thai voice commands is close to the results of PCC with the less execution time. It can conclude that the proposed system design architecture is implemented for the fast run-time and less resource usage.
Acknowledgement
This work was supported by the National Research Council of Thailand (NRCT) (256101A1580043, 2018), and Suan Sunandha Rajabhat University.
References
[1] “Watch: Brand new car falls off first floor of dealership in Mumbai”, Mumbai Mirror, Dec. 10, 2019. Available: https://mumbaimirror.indiatimes.com/mumbai/other/watch-brand-new-car-falls-off-first-floor-of-dealership-in-mumbai/articleshow/72456045.cms?utm\_source=contentofinterest\&utm\_medium=text\&utm\_campaign=cppst. [Accessed on 9-August-2021].
[2] J. Herskovitz, “Terrifying moment man narrowly avoids deadly fall after car dangles off nine-storey building”, Mirror, Available https://www.mirror.co.uk/news/weird-news/terrifying-moment-man-narrowly-avoids-8803524. [Accessed on 9-August-2021].
[3] Toyo headquarters, “2016 Toyota Prius Simple Advanced Parking Guidance System (S-APGS) LSC G0T”, Available: https://www.toyoheadquarters.com/threads/2016-toyota-prius-simple-advanced-parking-guidance-system-s-apgs-lsc-g0t.681/. [Accessed on 04-July-2021].
[4] Nissan Motor Corporation, “Intelligent Park Assist”, Available: https://www.nissan-global.com/EN/TECHNOLOGY/OVERVIEW/intelligent\_parking\_assist.html. [Accessed on 9-August-2021].
[5] H. Lin, J. Dai, L. Wu, and L. Chen, “A Vision-Based Driver Assistance System with Forward Collision and Overtaking Detection”, Sensors, Vol. 20, No. 18, 2020.
[6] Z. Chen, J. Qiu, B. Sheng, P. Li, and E. Wu, “GPSD: generative parking spot detection using multi-clue recovery model”, The Visual Computer, 2021.
[7] S. Prongnuch and S. Sitjongsataporn, “Exterior Car Parking Assistance Algorithm Based on Reconfigurable System for Future Industry,” Journal of Mobile Multimedia, Vol. 16, No. 1–2, pp. 203–220, 2020.
[8] S. Prongnuch and S. Sitjongsataporn, “Thai Voice-Controlled Analysis for Car Parking Assistance in System-on-Chip Architecture”, Advances in Technology Innovation, Vol. 5, No. 4, pp. 203–215, 2020.
[9] S. Sachdev, J. Macwan, C. Patel, and N. Doshi. “Voice-controlled Autonomous Vehicle using IoT”, Procedia Computer Science, Vol. 160, pp. 712–717, 2019.
[10] N. Gupta, “A Novel Voice Controlled Robotic Vehicle For Smart City Applications”, Journal of Physics: Conference Series, Vol. 1817, No. 1, IOP Publishing, 2021.
[11] O. Yudin, R. Ziubina, S. Buchyk, O. Matviichuk-Yudina, O. Suprun, and V. Ivannikova, “Development of Methods for Identification of Information Controlling Signals of Unmanned Aircraft Complex Operator”, Eastern-European Journal of Enterprise Technologies, Vol. 2, No. 9(104), pp. 56–64, 2020.
[12] Digilent Inc., “SoC Boards”, Available: https://store.digilentinc.com/boards-and-components/system-boards/soc-boards/ [Accessed on 9-August-2021].
[13] H. Djelouat, X. Zhai, M. Al Disi, A. Amira, and F. Bensaali, “System-on-chip Solution for Patients Biometric: A Compressive Sensing-based Approach”, IEEE Sensors Journal, Vol. 18, No. 23, pp. 9629–9639, 2018.
[14] H. Radner, J. Stange, L. Büttner, and J. Czarske, “Field-Programmable System-on-Chip-Based Control System for Real-Time Distortion Correction in Optical Imaging”, IEEE Transactions on Industrial Electronics, Vol. 68, No. 4, pp. 3370–3379, 2020.
[15] J. Kaur and S. R. N. Reddy, “Implementation of Linux Optimization Technique for ARM Based System on Chip”, Procedia Computer Science, Vol. 171, pp. 1780–1789, 2020.
[16] Xilinx Inc., “Vivado Design Suite User Guide”, Available: https://www.xilinx.com/support/documentation/sw\_manuals/xilinx2021\_1/ug973-vivado-release-notes-install-license.pdf [Accessed on 9-August-2021].
[17] Xilinx Inc., “Vitis Unified Software Platform Documentation”, Available: https://www.xilinx.com/support/documentation/sw\_manuals/xilinx2019\_2/ug1393-vitis-application-acceleration.pdf [Accessed on 9-August-2021].
[18] Xilinx Inc., “Embedded Software & Ecosystem ”, Available: https://www.xilinx.com/products/design-tools/embedded-software.html\#overview. [Accessed on 9-August-2021].
[19] S. Nandi and D. Kundu, Statistical Signal Processing: Frequency Estimation, Springer Singapore, 2020.
[20] H. Zhang and A. Song, “A Map-based Normalized Cross Correlation Algorithm using Dynamic Template for Vision-guided Telerobot”, Advances in Mechanical Engineering, Vol. 9, No. 9, pp. 1–12, 2017.
Biographies

Sethakarn Prongnuch received his B.Eng. degree in computer engineering from the Rajamangala University of Technology Phra Nakhon in Bangkok, Thailand in 2011, and the M.Eng. and D.Eng. degrees in Computer Engineering from the Mahanakorn University of Technology in Bangkok, Thailand in 2013 and 2019, respectively. He has worked as a lecturer at the department of Robotics Engineering at Faculty of Industrial Technology in Suan Sunandha Rajabhat University in Bangkok, Thailand since 2013. His research interests include computer architectures and systems, embedded system, heterogeneous system architecture, and robotics.

Suchada Sitjongsataporn received the B.Eng. (First-class honours) and D.Eng. degrees in Electronic Engineering from Mahanakorn University of Technology, Bangkok, Thailand in 2002 and 2009. She has worked as lecturer at department of Electronic Engineering, Mahanakorn University of Technology since 2002. Currently, she is an Associate Professor and Associate Dean for Research at Faculty of Engineering and Technology in Mahanakorn University of Technology. Her research interests are mathematical and statistical models in the area of adaptive signal processing for communications, networking, embedded system, image and video processing.
Journal of Mobile Multimedia, Vol. 18_4, 1079–1098.
doi: 10.13052/jmm1550-4646.1846
© 2022 River Publishers