Cluster-based Data Sharing for Web 3.0 in Intelligent Transportation Systems
Mohammed Alkhathami
Information Systems Department, College of Computer and Information Sciences, Imam Mohammad Ibn Saud Islamic University (IMSIU), Riyadh 11432,
Saudi Arabia
E-mail: maalkhathami@imamu.edu.sa
Received 27 August 2024; Accepted 04 November 2024
Abstract
Intelligent transportation system (ITS) applications are dependent on secure and robust wireless data sharing among vehicles and roadside units (RSUs). Multiple types of data are shared among the ITS devices which include safety information, road services, web based information retrieval and task computation. Web 3.0 offers a decentralized, distributed and secure data sharing mechanism for ITSs. Allocation of wireless channel resources are critical to enable an efficient ITS system. In this paper, a novel data sharing technique for Web 3.0 based ITS is presented that relies on an intelligent clustering algorithm. In the first step, the proposed technique uses a K-means algorithm to find groups of vehicles with similar speeds. In the second step, each cluster is assigned an RSU which has the highest average data rate with all vehicles in the cluster. This is achieved by using a stable matching technique so that there is no contention and each cluster is assigned a separate RSU. The algorithm periodically updates the clusters and RSU allocation for web data sharing between vehicles and RSUs. Simulation results show that the proposed clustering-based data sharing technique improves sum-rate by 20% and reduces network delay by 23%.
Keywords: Intelligent transportation system, vehicular network, Web 3.0, mobility, data sharing.
1 Introduction
Intelligent transportation systems (ITSs) are the future technology that can solve problems related to traffic management and further improve the comfort of passengers while traveling [9, 7, 4, 1, 17, 3]. It has several applications that can enhance the utilization of road networks. In addition, it also has the ability to realize innovative applications such as augmented reality and autonomous driving [15, 2, 8, 16].
ITSs are based on a vehicular network that enables vehicles to share their data with the infrastructure nodes known as roadside units (RSUs). With a robust network of communication in place, vehicles can access several useful application related data from the RSU or offload application related tasks to the RSU. This may include applications such as multi-player games over the web, online web streaming on the vehicular network and augmented reality over Web 3.0 [14, 6].
In addition to all the above applications, Web 3.0 based decentralized and distributed Blockchain assisted data sharing can help achieve high security and privacy in a vehicular network [5, 19]. As ITS applications involve critical decision making, it is vital to have a robust and secure network over which data is shared. Thus, ITS and Web 3.0 can mutually benefit from each other.
In order to achieve ITS based Web 3.0 data sharing, efficient communication between nodes (vehicles and RSU) is needed. A timely data sharing with reduced delay can help achieve quality of service (QoS) for the web based ITS applications. Thus, efficient allocation of wireless resources, computing and data storage capacities of RSUs and intelligent algorithms must be combined to achieve a web enabled ITS.
In this paper, a new clustering technique is proposed to improve the data rate of Web based ITS applications. Since mobility is a major issue in vehicular networks, this parameter is considered for data sharing in this paper. The proposed technique works in four major steps. The first step involves grouping of vehicles based on the K-means algorithm. The rationale of this step is to find cluster of vehicles with similar mobility so that they can share data with an RSU and each other effectively. The second step utilizes a stable matching technique to assign a single RSU to each cluster. This is done using average data rate values of a cluster towards RSUs. In the third step, data transmission along clusters is executed. The last step updates the clusters after a certain time interval as the vehicle mobility and positions change regularly. The proposed technique is implemented in a MATLAB simulator and shows significant improvement in terms of sum rate and packet delay.
The organization of the paper is as follows. Section 2 describes techniques in the literature. Section 3 presents the system model and Section 4 explains the proposed technique in detail. Section 5 presents the evaluation and results of the proposed technique and Section 6 provides conclusions.
2 Related Works
This section first presents a review of recent work in the area of cluster-based vehicular communications. This is followed by a brief discussion of how the proposed technique is different than the current work in the literature.
Table 1 Literature review of different clustering techniques
| Goal of the | |||
| Ref. | Technique | Key Idea | Results |
| [20] | Reduce energy consumption | Popularity-based resource allocation Clustering using fuzzy C-means Cluster head using traffic information |
Reduced power Meeting delay deadline |
| [3] | Find the optimal number of clusters | Multi-objective optimization Nature-based meta-heuristic algorithm Harris Hawks optimization technique |
Reduced latency |
| [13] | Timely data transmission | Crowd sensing information sharing Adaptive clustering V2V and V2I channel quality |
Reduced packet loss rate |
| [10] | Load balancing | Blockchain mining load in ITS Auction theory for resource allocation Fair mining task offloading |
Improved transmission rate Improved fairness |
| [12] | Interference-aware transmission scheduling | Vehicle division into adaptive clusters Time slot reuse after interference range |
Improved packet reception rate |
2.1 Literature Review
The work related to clustering in vehicular networks is summarized in Table 1. In [20], the goal of the proposed clustering technique is to reduce the energy consumption of vehicles. To achieve this, a popularity-based technique is proposed that allocates wireless resources efficiently. Network functions that are commonly used are allocated more resources and vice versa. The proposed algorithm selects the number of clusters based on the fuzzy c-means algorithm. For cluster head selection, traffic information is utilized. Results show that the proposed technique achieves reduced power consumption while meeting the delay deadlines.
In [3], the goal of the technique is to find the optimal number of clusters that result in efficient communications. For this, a multi-objective problem is formulated and solved using a nature-based meta-heuristic algorithm called the Harris Hawk optimization technique. By using the proposed optimization algorithm, reduced latency is achieved for transmitting data packets. Also, a fewer number of hops are required to transmit the message to the destination.
The work in [13] develops a transmission technique for timely data delivery. The scenario considered is related to crowdsensing information sharing. An adaptive clustering technique is proposed in this regard that takes into account vehicle to vehicle (V2V) and vehicle to infrastructure (V2I) channel quality. Simulation results show a reduced packet loss ratio incurred by the proposed technique.
In [10], a clustering-assisted load-balancing technique is proposed. The scenario considered is Blockchain mining in vehicular networks. Vehicles are divided into clusters with a mining node allocated to each cluster. An auction theory-based resource allocation is proposed for mining the Blockchain transactions. The proposed technique also achieves fair mining task offloading. Results show that the proposed technique has a better transmission rate and fairness performance in different vehicle density scenarios.
The work in [12] develops an interference-aware transmission scheduling for vehicular networks. Vehicles are divided into clusters and their size is adaptively varied based on an analytical model of interference and packet reception. The proposed algorithm reuses time slots after a distance equal to the interference range. Simulation results show that the proposed scheme results in an improved packet reception rate.
In addition, other clustering techniques focus on packet reception rate improvement, security, and energy efficiency.
2.2 Novelty of the Proposed Technique
As compared to previous clustering techniques, the proposed technique aims to cluster vehicles based on their mobility so that these vehicles can cooperate with each other. Furthermore, when the RSU broadcasts web data to the cluster, all vehicles can receive it with a good data rate. Moreover, the clusters are updated regularly so that web based data sharing can be improved.
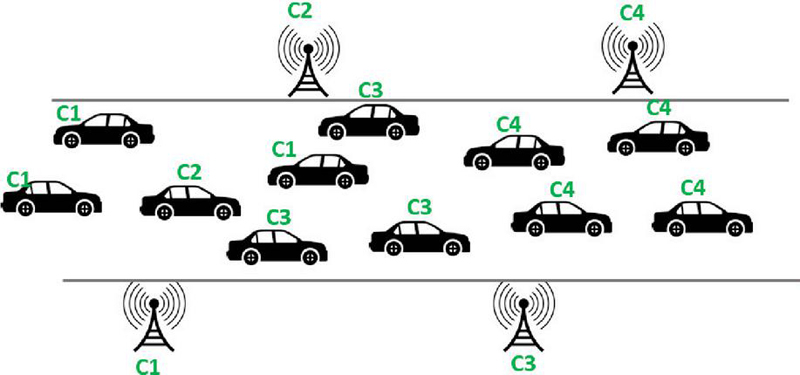
Figure 1 System model.
3 System Model
The system model under consideration is an ITS scenario where vehicles are equipped with wireless networking capabilities and moving along a bi-directional highway, as shown in Figure 1. Each vehicle has web data or web application related task to be shared with RSUs on the uplink. Similarly, the RSUs respond with computed task results or web service-related data on the downlink to the vehicles. The communication takes place over a Cellular V2X (C-V2X) link and resource blocks are allocated to the vehicles and RSUs for data transmission.
As shown in Figure 1, a cluster-based vehicular communication scenario is considered in this paper where several vehicles and an RSU are part of a single cluster. Vehicles and RSUs both use transmission power to transmit the messages in the uplink and downlink respectively. The power received at the destination can be given from the following equation:
| (1) |
Here is the channel gain which varies based on multi-path fading distribution [11], is the distance between transmitter and receiver, and is the exponent of path loss. Based on received power and noise, the signal-to-noise ratio is evaluated, which can be further used to find the link data rate.
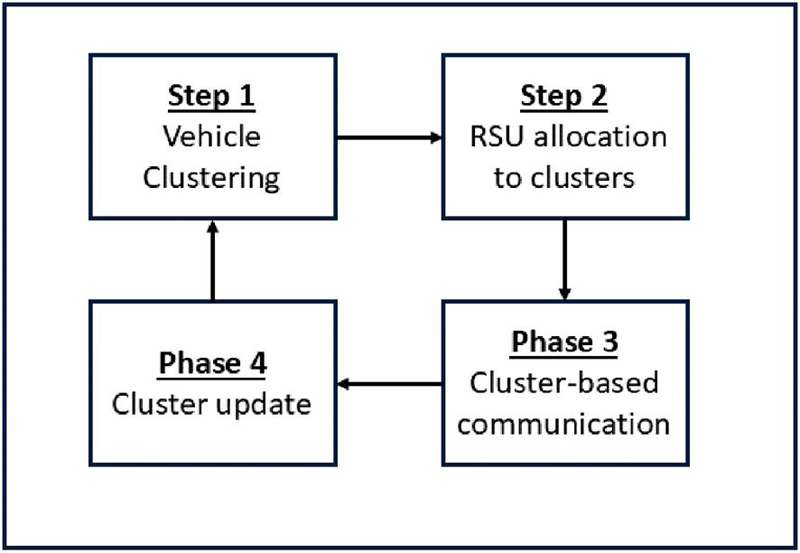
Figure 2 Different phases of the proposed technique.
4 Proposed Technique
The proposed technique for data sharing is divided into four different steps, as shown in Figure 2.
4.1 Step 1: Vehicle Clustering
The first step involves clustering of the vehicles and grouping them based on their mobility. As shown in Algorithm 1, the algorithm for vehicle classification is based on a K-means algorithm. The number of clusters in the road network are equal to the RSU within a given coverage area. Initially, the cluster centroids are taken as different vehicle speeds. This is calculated by dividing minimum and maximum speeds and dividing them into different groups (the mean value of the group is taken as the initial centroid value).
Vehicles are then placed in the clusters by minimizing the difference between their own speed and cluster centroids. Furthermore, the cluster centroids are updated as the mean of the cluster once vehicles are placed in these clusters. Hence, cluster centroids are changed every time. The algorithm continues unless convergence is achieve.
The advantage of the proposed technique is that vehicles are grouped based on mobility and can effectively communicate with the RSUs. Mobility has a major impact on the communication in terms of quality of channel and transmission time taken to transmit and receive the messages. Therefore, with this grouping, vehicles with similar mobility patterns and closer to each other are grouped together.
4.2 Step 2: RSU Allocation to Clusters
Once the clusters have been formed, the RSU allocation process is started, as shown in Algorithm 2. Each RSU is allocated to a single cluster and manages communication with it. To allocate the RSUs, a preference list for each cluster is first evaluated. This is done on the basis of average data rate of the cluster towards the RSUs. The average data rate in the cluster is evaluated by finding the data rate of all vehicles in the cluster towards a RSU and taking the average.
After the preference list is evaluated, the stable matching algorithm is applied to match each cluster with the RSU. Finally, the RSUs are attached to their allocated cluster and communication for web applications is carried out.
4.3 Step 3: Cluster-based Communication
Vehicles in each cluster send and receive their web based tasks and web data to and from their allocated RSU. To transmit the messages, resource blocks (RBs) are allocated by the base station as in C-V2X communications.
4.4 Step 4: Cluster Update
Vehicles update their cluster after every seconds. Within this time, vehicles remain within the same cluster. During the update process, the previous steps of clustering and RSU allocation are repeated. This update process takes into account change in vehicle speeds so that efficient communication can take place considering the impact of vehicle mobility.
5 Performance Evaluation
In this section, the simulation model, evaluation of the proposed technique, and results are discussed.
5.1 Simulation Details
A vehicular simulation scenario is developed in MATLAB simulator. The road topology considered is of a bi-directional highway with three lanes per direction. A realistic traffic scenario is generated using a well-known traffic simulator known as Simulation of Urban MObility (SUMO). Vehicle density is varied from 60–240 vehicles/km covering a range of low, medium, and dense scenarios. Vehicle speeds are varied from 60–120 km/hr. Four types of web packet services are generated, two for uplink and two for the downlink. For the uplink, safety messages and task offloading services are used. Similarly, for the downlink, traffic information, and web service response messages are used. The communication range is taken as 300 m and fading intensity (Nakagami-m value) is varied from 1 to 5. The packet-related details of each message are listed in Table 2.
For performance comparison with other techniques, two recent schemes explained in the literature review section are used. The first is auction theory-based clustering [10] and the other is interference-aware clustering [12].
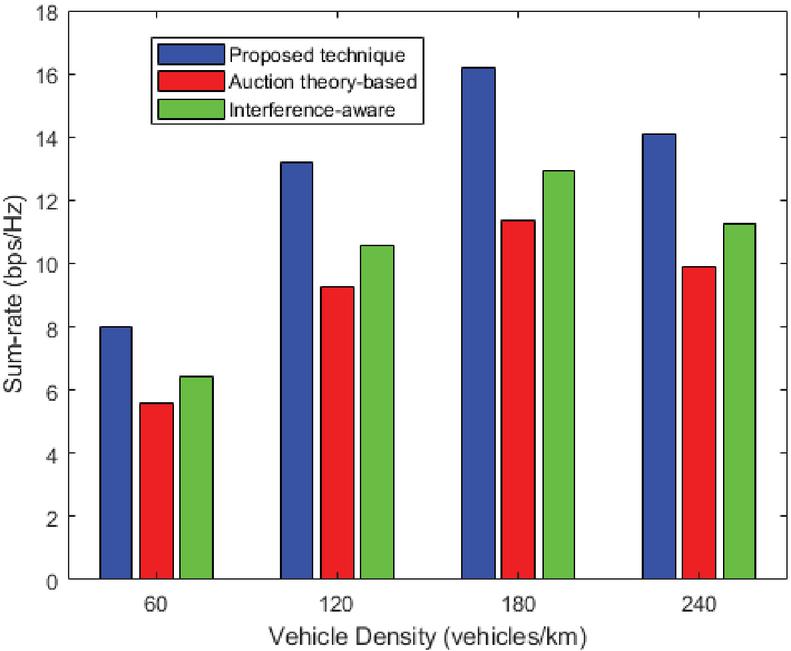
Figure 3 Sum rate vs. vehicle density.
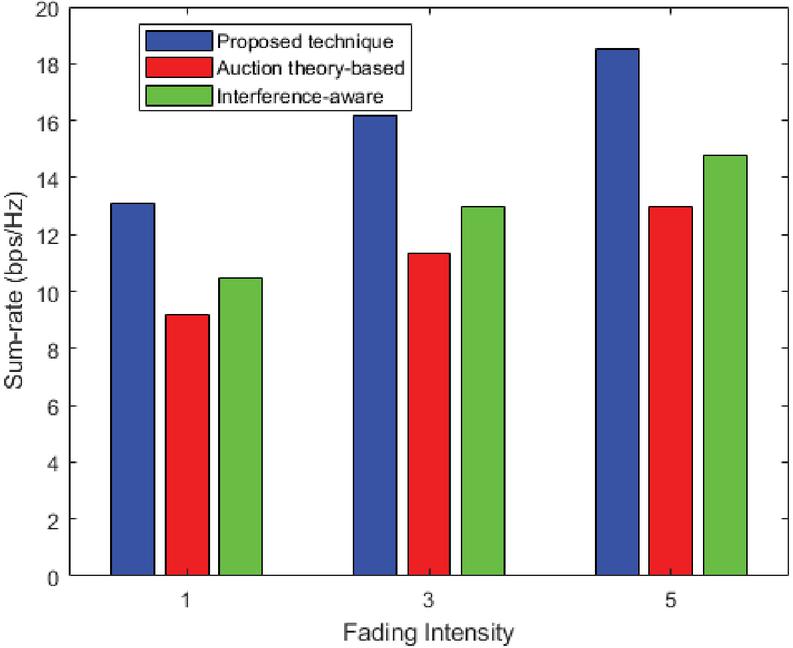
Figure 4 Sum rate vs. fading intensity.
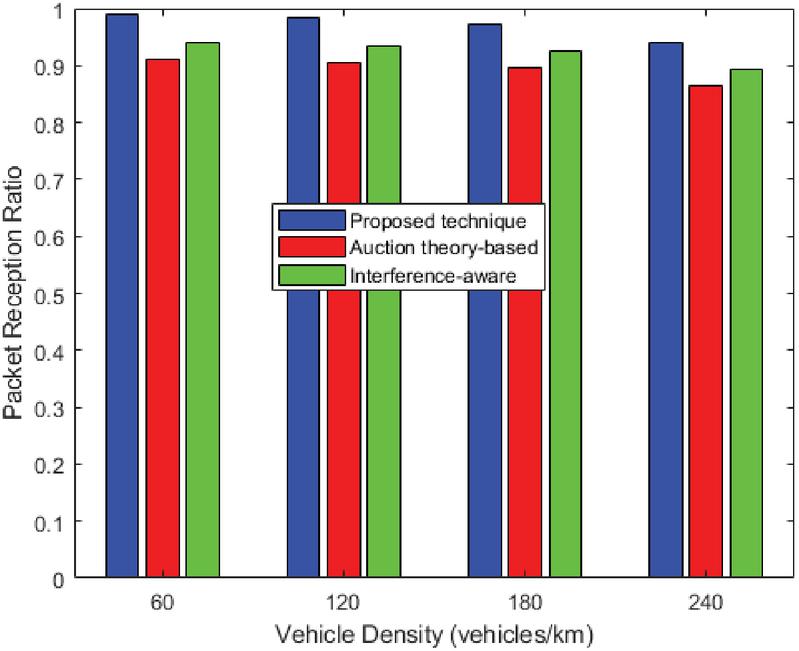
Figure 5 Packet reception ratio vs. vehicle density.
Table 2 Parameters used in simulations.
| Parameter | Value |
| Vehicle scenario | Highway |
| Number of lanes | 6 |
| Vehicle density | 60–240 vehicles/km |
| Vehicle spacing | 25–100m |
| Vehicle speeds | 60–120 km/hr |
| Number of downlink messages | 2 |
| Number of uplink messages | 2 |
| Safety message packet size | 100 bytes |
| Safety message packet generation rate | 10 per second |
| Task offloading packet size | 500 bytes |
| Task offloading packet generation rate | 1 per 3 seconds |
| Traffic information packet size | 300 bytes |
| Traffic information packet generation rate | 5 per second |
| Service response packet size | 500 bytes |
| Service response packet generation rate | 1 per second |
| Update time window | 10 s |
| Communication range R | 300 m |
| Fading intensity (m) | 1, 3, 5 |
5.2 Discussion of Results
Figure 3 plots the results of the sum rate achieved by the three techniques at different vehicle density values. The fading intensity for this experiment is taken as 3 which refers to a medium level of fading in the network. Results show that the proposed clustering technique performs better than both other techniques at all vehicle densities. The reason for improved performance by the proposed technique is the consideration of vehicle mobility and data rate mapping while allocating RSUs to the vehicles.
It can be seen that the proposed technique provides up to 20% at different vehicle density values. In comparison, the interference-aware clustering technique performs better than the auction theory-based clustering technique due to only reusing time slots after an interference range. This results in an improved sum rate as compared to the auction scheme. It should be noted that the sum rate initially increases with vehicle density; however, in the dense network scenario, the sum rate drops slightly due to increased interference and collision between packets. This results in a higher packet loss rate and the sum-rate is reduced.
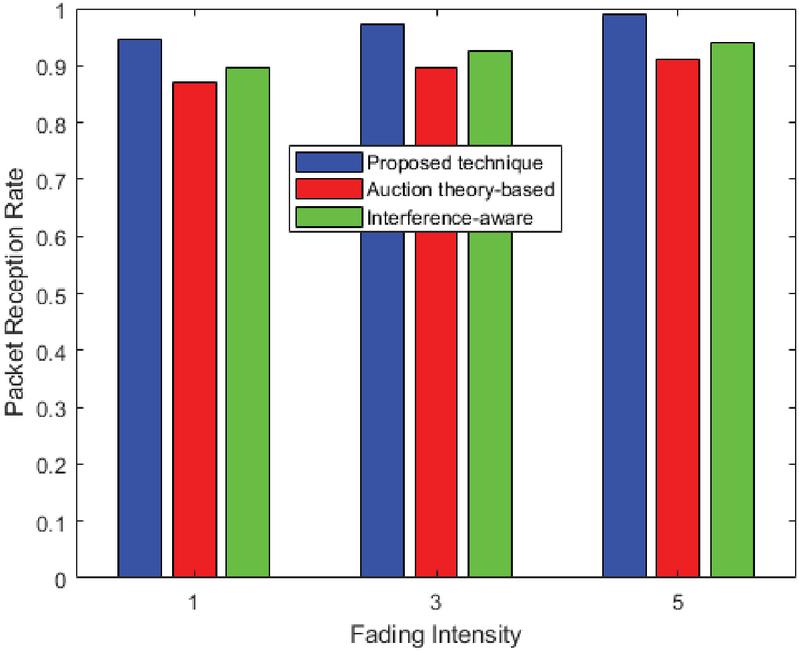
Figure 6 Packet reception rate vs. fading intensity.
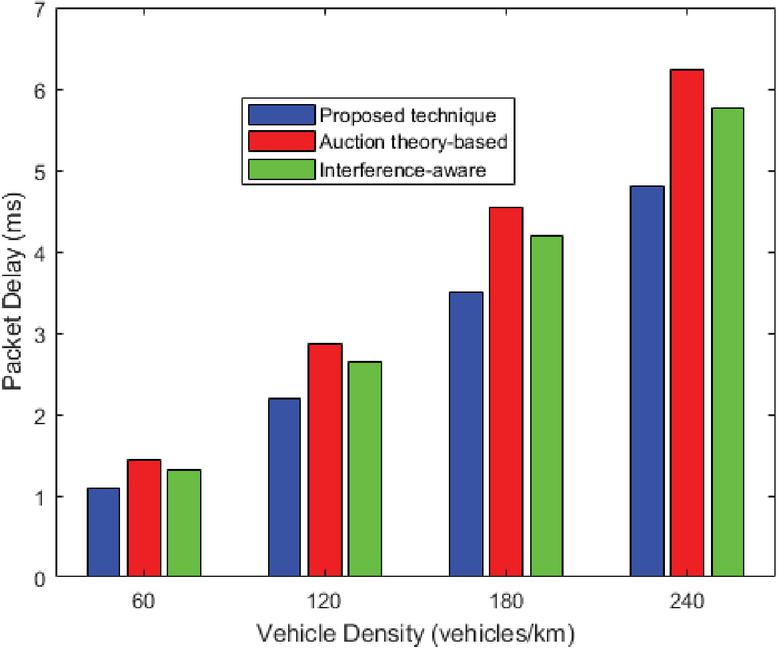
Figure 7 Packet delay vs. vehicle density.
The results in Figure 4 show that the proposed technique achieves a higher sum rate at different fading intensity values. At the lowest fading intensity, when the channel quality is poor, the proposed technique improves the sum rate by 4 bps/Hz as compared to other techniques. The reason for achieving better performance at different wireless channel quality levels is due to the consideration of data rates and mobility in the proposed technique. As the quality of the channel is improved at higher fading intensities, the sum rate for all three techniques is increased.
The results in Figure 5 show the packet reception ratio of three techniques at different vehicle densities. It can be seen that the proposed technique maintains above 95% packet reception ratio at different network density scenarios. On the other hand, auction theory-based and interference-aware clustering techniques are more prone to packet collisions and result in a reduced packet reception ratio. As the packet reception ratio is a key metric particularly in autonomous driving applications, a slight reduction in this metric can cause application reliability to massively suffer.
The packet reception ratio at different fading intensities is plotted in Figure 4. Results highlight the performance gain achieved by the proposed technique at different channel quality levels. A key feature of the proposed technique is that it maintains more than 95% packet reception ratio at the fading intensity of 1. In comparison, the auction theory-based clustering and interference-aware clustering result in packet reception ratios of 0.86 and 0.89 respectively.
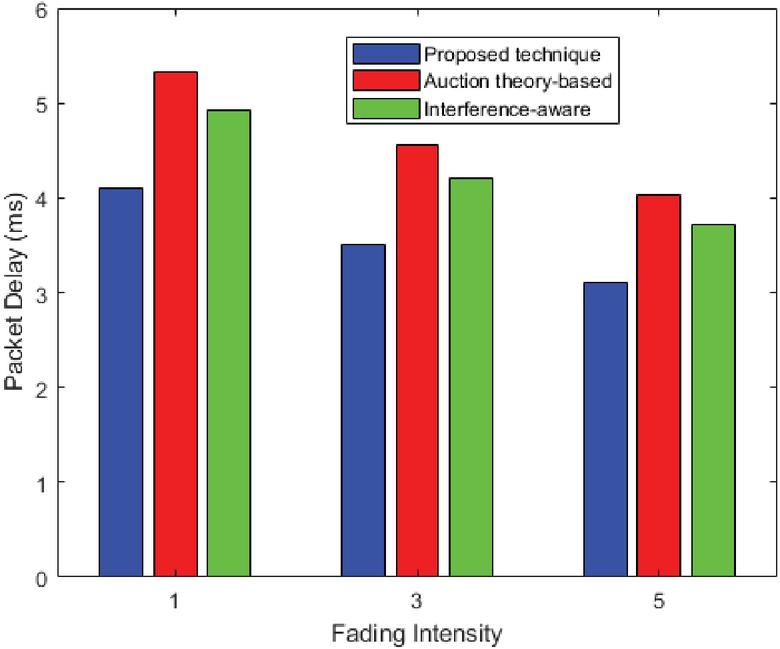
Figure 8 Packet delay vs. fading intensity.
The packet delay of the three techniques is plotted in Figure 7. The results show that the proposed technique faces the lowest delay for both uplink and downlink messages. As the vehicle density increases, the packet delay increases due to more time the packets need to wait to access the channel. At a vehicle density of 240 vehicles/km, the packet delay for proposed clustering, the auction theory-based clustering, and the interference-aware clustering are 4.8 ms, 6.24 ms, and 5.76 ms respectively.
The results in Figure 8 plot packet delay against different fading intensity values. It can be seen that as the fading intensity is increased, the packet delay is slightly reduced. This is because the channel quality is improved resulting in improved data rates. Moreover, packets lost due to fading are also reduced, thus requiring a smaller number of re-transmissions. The packet delay reduction by the proposed technique is due to efficient clustering that considers mobility and data rates for allocating RSUs to vehicles.
6 Conclusion
Efficient web based data sharing in vehicular networks is an important requirement for future ITS applications. Reliable communication between vehicles and RSU is required for many web 3.0 enabled ITS applications so that data sharing can be quick and secure. This paper proposes a clustering algorithm to achieve high data rates for vehicle-RSU transmissions. The proposed technique uses K-means clustering technique to group vehicles based on their mobility. Furthermore, RSUs are allocated to each cluster based on data rates and stable matching algorithm. Simulation results verify that by using the proposed clustering mechanism, a higher sum rate and reduced packet delay are achieved when compared with other state-of-the-art clustering techniques.
References
[1] Mohamad Abou Houran, Maimoona Asad, Gautam Srivastava, Jawad Mirza, Ali Ranjha, Muhammad Awais Javed, and Xu Yang. Intelligent reflecting surfaces assisted cellular v2x based open ran communications. IEEE Transactions on Vehicular Technology, 2024.
[2] Ahmed S Alfakeeh and Muhammad Awais Javed. Intelligent data-enabled task offloading for vehicular fog computing. Applied Sciences, 13(24):13034, 2023.
[3] Asad Ali, Farhan Aadil, Muhammad Fahad Khan, Muazzam Maqsood, and Sangsoon Lim. Harris hawks optimization-based clustering algorithm for vehicular ad-hoc networks. IEEE Transactions on Intelligent Transportation Systems, 24(6):5822–5841, 2023.
[4] Sarath Babu and Arun Raj Kumar P. Cdspan: A collaborative distributed spanner backbone for multiple source multicast routing in vehicular network. IEEE Transactions on Vehicular Technology, 73(4):5213–5228, 2024.
[5] Bin Cao, Lei Zhang, Lan Zhang, Salil Kanhere, Chen Sun, and Dusit Niyato. Advanced networking and applications for metaverse and web 3.0. IEEE Network, 37(6):8–9, 2023.
[6] Prakhar Consul, Ishan Budhiraja, and Deepak Garg. A hybrid secure resource allocation and trajectory optimization approach for mobile edge computing using federated learning based on web 3.0. IEEE Transactions on Consumer Electronics, 2023.
[7] Yaping Cui, Hongji Shi, Ruyan Wang, Peng He, Dapeng Wu, and Xinyun Huang. Multi-agent reinforcement learning for slicing resource allocation in vehicular networks. IEEE Transactions on Intelligent Transportation Systems, 25(2):2005–2016, 2024.
[8] Yaping Cui, Xisheng Yang, Peng He, Dapeng Wu, and Ruyan Wang. O-ran slicing for multi-service resource allocation in vehicular networks. IEEE Transactions on Vehicular Technology, 73(7):9272–9283, 2024.
[9] Duarte Dias, Miguel Luís, Pedro Rito, and Susana Sargento. A software defined vehicular network using cooperative intelligent transport system messages. IEEE Access, 12:93152–93170, 2024.
[10] Furqan Jameel, Muhammad Awais Javed, Sherali Zeadally, and Riku Jäntti. Efficient mining cluster selection for blockchain-based cellular v2x communications. IEEE Transactions on Intelligent Transportation Systems, 22(7):4064–4072, 2021.
[11] Mohammad Zubair Khan, Muhammad Awais Javed, Hamza Ghandorh, Omar H. Alhazmi, and Khalid S. Aloufi. Na-smt: A network-assisted service message transmission protocol for reliable iov communications. IEEE Access, 9:149542–149551, 2021.
[12] Mohammad Zubair Khan, Muhammad Awais Javed, Hamza Ghandorh, Omar H Alhazmi, and Khalid S Aloufi. Interference-aware transmission scheduling for internet of vehicles. Intelligent Automation & Soft Computing, 33(1), 2022.
[13] Luning Liu, Luhan Wang, Zhaoming Lu, Yong Liu, Wenpeng Jing, and Xiangming Wen. Cost-and-quality aware data collection for edge-assisted vehicular crowdsensing. IEEE Transactions on Vehicular Technology, 71(5):5371–5386, 2022.
[14] Zhongjian Liu, Xiaolong Xu, Feng Han, Qingzhan Zhao, Lianyong Qi, Wanchun Dou, and Xiaokang Zhou. Secure edge server placement with non-cooperative game for internet of vehicles in web 3.0. IEEE Transactions on Network Science and Engineering, 2023.
[15] Olivia Nakayima, Mostafa I. Soliman, Kazunori Ueda, and Samir A. Elsagheer Mohamed. Combining software-defined and delay-tolerant networking concepts with deep reinforcement learning technology to enhance vehicular networks. IEEE Open Journal of Vehicular Technology, 5:721–736, 2024.
[16] Lucas Pacheco, Torsten Braun, Denis Rosário, Antonio Di Maio, and Eduardo Cerqueira. A distributed aggregation approach for vehicular federated learning. IEEE Access, 12:72155–72169, 2024.
[17] Ali Ranjha, Muhammad Awais Javed, Md. Jalil Piran, Muhammad Asif, Mostafa Hussien, Sherali Zeadally, and Jaroslav Frnda. Toward facilitating power efficient urllc systems in uav networks under jittering. IEEE Transactions on Consumer Electronics, 70(1):3031–3041, 2024.
[18] Ali Ranjha, Muhammad Awais Javed, Gautam Srivastava, and Muhammad Asif. Quasi-optimization of resource allocation and positioning for solar-powered uavs. IEEE Transactions on Network Science and Engineering, 10(6):4071–4081, 2023.
[19] Xiaolong Xu, Sizhe Tang, Lianyong Qi, Xiaokang Zhou, Fei Dai, and Wanchun Dou. Cnn partitioning and offloading for vehicular edge networks in web3. IEEE Communications Magazine, 61(8):36–42, 2023.
[20] Haitao Zhao, Jiawen Tang, Bamidele Adebisi, Tomoaki Ohtsuki, Guan Gui, and Hongbo Zhu. An adaptive vehicle clustering algorithm based on power minimization in vehicular ad-hoc networks. IEEE Transactions on Vehicular Technology, 71(3):2939–2948, 2022.
Biography

Mohammed Alkhathami is working as Associate Professor at Information Systems Department, College of Computer and Information Sciences, Imam Mohammad Ibn Saud Islamic University (IMSIU), Riyadh Saudi Arabia. His research interest includes communication systems, networks, security and computing.
Journal of Web Engineering, Vol. 23_7, 1025–1040.
doi: 10.13052/jwe1540-9589.2375
© 2024 River Publishers