Performance Evaluation of New Energy Vehicles with Human-Machine Interaction in Intelligent Transportation Systems
Peng Zhang1, 2, Zhiwei Guan1, 3,* and Jingjing Sun2
1Tianjin University of Technology and Education, Tianjin 300222, China
2Hebi Polytechnic, Hebi 458000, China
3Tianjin Sino-German University of Applied Sciences, Tianjin 300222, China
E-mail: zp309808282zp@163.com
*Corresponding Author
Received 26 November 2021; Accepted 05 January 2022; Publication 25 January 2022
Abstract
An intelligent transport system is a sophisticated platform developed to provide new solutions related to transport administration, enabling people to be increasingly aware and make infrastructures secure, more synchronized, and more sophisticated utilization. Energy vehicles in intelligent transportation have additional positive benefits to society. However, handling mobility, connectivity, and communication infrastructure are significant challenges in integrating the energy vehicle in intelligent transport systems. This paper proposed an energy vehicle with a human interaction framework (EVHIF) to enhance the intelligent transportation system. The EVHIF provides human-machine interaction through a voice-over interface, and the natural language processing made the interface more flexible. The voice-over interaction framework adopts the advanced user interface, mobility problems and becomes more accessible. Static language program modifies the user voice interaction to the energy vehicles.
If correctly designed and executed, ITS can save a great deal of time, money, and even lives. ITS encompasses the information analysis and data transmission programs that enable the operation and maintenance of surface transportation modes to increase the safety and efficiency of conveying people and commodities. People, safety officers, and government also use its benefits.
Experimentation is done by focusing on the performance of EVHIF in an intelligent transportation system. Evaluation results prove that EVHIF is efficient at 98.56% and advisable for transportation systems with advanced interaction frameworks.
Keywords: Energy vehicle, intelligent transport system, human-machine interaction, natural language processing, voice-over interface.
1 Public Transportation System
Transmission systems, such as Lorries, trains, vehicles, and metropolitan areas, are included in public transit companies [1]. Such arrangements are publicly available, free of money, and can be a scheduled route [2]. It aims to introduce or expand public transit to promote access to and use a transportation system that minimizes driving kilos and overcrowding [3]. Transport networks assist individuals in reaching everyday locations, including working sites, institutions, healthy eating services, and stable and comfortable health services. The function of public transportation services is vital for people who cannot drive, notable people without access to vehicles, kids, and individuals with impairments [4]. In addition, it provides the opportunity to enhance physical exercise by pedestrian and biking and by reducing motor vehicles [5].
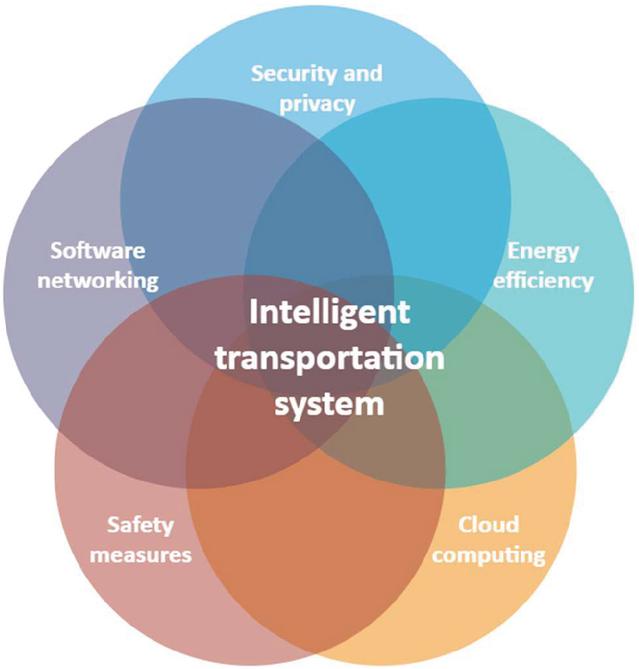
Figure 1 Networks of the intelligent transportation system.
1.1 Networks of the Intelligent Transportation System
Figure 1 gives the networks used in intelligent transportation systems with human-computer interaction. An intelligent system is based on artificial intelligent computing frameworks [6]. The layers on the smart system have security and privacy protections that allow users to be safer and more stable to ensure disasters [7]. The method of energy efficiency utilized in this field is essential to know the vehicle’s energy meter for sensible driving. The software is the interaction program for determining the vehicle’s path. Safety measures encompass all safety procedures in the event of an accident. The cloud computing strategy saves the vehicle data and routes [8].
It is not enough to focus on the automobile creative initiatives and inventions under technological skills and intelligence [9]. The entire transport system must reinvent the unique technology of vehicles, such as multi-layer, area of concern, and departmental.
Every line of code burned into the ECUs of a contemporary automobile raises the risk of cyberattack. As a result, every piece of code must adhere to the cybersecurity guidelines. Furthermore, the danger extends beyond the car itself to the backend and third-party services. The practice of safeguarding systems, networks, and programmes through integrated security measures is called “integrated security.” The most common goals of these cyberattacks are gaining unauthorized access to, modifying, or erasing confidential data, extorting money from the victims or otherwise disrupting business as usual.
Furthermore, integrated security systems are increasingly vital with the advanced technology of future traffic congestion networks. It requires varied communications, integrating storage, system, sensing processes, and IT material knowledge [10]. Over recent years, algorithms, cloud services, and global awareness of traffic information have boosted the development of the transport system.
Artificially intelligent computing frameworks form the foundation of an intelligent system. To prevent disasters, the layers of the smart system have security and privacy protections that keep users safe and secure. For safe driving, it is essential to know the vehicle’s energy meter using the method of energy efficiency in this field. You use a software program to figure out which route to take the vehicle on. The term “safety measures” refers to all steps taken to prevent an accident from occurring. It is done using cloud computing; vehicle data and routes can be stored indefinitely.
The transportation system must reimagine Multi-layer, area-of-concern, and departmental vehicle technology. Integrated security systems will become even more critical as future traffic congestion networks develop cutting-edge technology. To do this, you’ll need a wide range of communication methods, as well as the ability to integrate storage, systems, and sensing processes. Algorithms, cloud services, and heightened global awareness of traffic data have contributed to the rapid growth of the transportation system in recent years.
1.2 Intelligent Transportation System
The ongoing development of smart transportation systems has led to a new era of interrelated intelligent systems, a quantifiable leap in traffic safety [11]. These systems permit the transmission of information among several apps and future analyses to improve safe driving and facilitate vehicle traffic and satisfaction.
Driver behaviour is one element that determines pedestrian safety [12]. Different studies reveal that driving errors often contribute significantly to more than 81 percent of road accidents [13]. Therefore, it is vital to learn, analyze, and model human driving behaviour realistically to improve road transport safety [14]. Different drivers show their behaviour because of various traffic experiences, emotions, operating inclinations, etc. One of the key difficulties in driving attributes research involves identifying driving dynamics [15].
It is possible to interface with and store the information by employing intelligence algorithms [16]. The voice-over interaction framework is used intelligent-based approaches to apply the paradigm for the driver/user who operates the vehicle to the communication foundation [17].
An intelligent system uses observable data and forecasts it to take judgments effectively [18]. Intelligent system ways to deal with these unlikely kinds of unintentionality are voice-over interaction and static language programs [19]. Intelligence has been established in a variability of ways and implemented. Some examples can be found below:
• Legitimate monitoring of crime statistics enhances consumers’ safety in the transportation system in urban areas [20]. In addition, it will help the police more efficiently investigate and safeguard the security of their inhabitants.
• Self-driven cars and trucks have been of considerable attention in recent years [21]. For example, sector Lorries were developed to decrease traffic fatalities and boost productivity to drive by themselves [22].
• The use of intelligence on pedestrian and mountain-bike pathways will reduce road accidents and injuries, enabling a wider transportation choice and a general reduction in emissions [23].
Get familiar with all traffic signs, signals, lights, and road laws ahead of time. “Road safety guidelines” are the greatest approach to avoid accidents. Avoid driving for long periods at a time. After every two hours of nonstop driving, stop for a proper break. Keep in mind that “Man is a man and not a machine” at all times. Before you get behind the wheel, familiarise yourself with all of the traffic signs, signals, lights, and rules of the road. “The best tools to avoid accidents are road safety standards,” you should always keep in mind.
Avoid driving for long periods at a time. After every two hours of driving, take a proper snooze. “Man is a man and not a machine,” therefore always remember that.
Thus, there are many uses of intelligent transportation systems for human-computer interaction. Static language program for converting the voice-over technique for machine understandability. The main contributions of the research are
• The design of EVHIF is for enhancing the intelligent transportation system by resisting interruptions like accidents and wrong routes.
• The voice-over interaction framework interacts with the machine for driving and storing in the cloud system.
• A static language program converts the user language to a machine-understandable program.
• As part of the intelligent transportation system, EVHIF is designed to withstand interruptions such as accidents and incorrect routes.
• The voice-over interaction framework works with the machine for driving and cloud storage.
• User language is translated into machine-readable code with the help of static languages.
Section 1 introduces the performance evaluation of vehicles using human-computer interaction and a detailed literature review in Section 2. Section 3 elaborates on the proposed EVHIF technique’s thorough observing process and incorporates the interacting practices for driving safely and its related actions. Section 4 includes results that authenticate the performance, reliability with the corresponding descriptions. Finally, the conclusion with the future perspectives is discussed in Section 5.
2 Literature Review on Human-Machine Interaction in Intelligent Transportation
This section describes several research works based on the human-computer interaction in intelligent transportation techniques. The aim is to find a way for these research themes to escape the discomfort of problematic characteristics of traffic by enhancing decision-making. Many of these terms have activated function to influence or adapt it, while others try to do a more comfortable match for influences or better management of excellence.
Sobral, T. et al. [24] proposed imagining urban mobility from intelligent transportation organizations (IUM-ITO). Smart transport systems are a key factor in the paradigm of green infrastructure. Such devices already produce huge quantities of detailed information to determine the complexities of people that may be examined. Scholars and practicers have developed a wide range of investigation and participatory visualization tools to deal with the multimodal character of urban space-temporal movement data. Data visualization offers a variety of views on data and aids domain expert analytical work. The paper explores which issues of public transport and associated theories were tackled and which strategies and senses of visualization were employed.
Ferdowsi, A. et al. [25] introduced deep learning for mobile analytics in intelligent transportation systems (DL-MAITS). Intelligent transport systems (ITSs) will play a key role in smart cities hereafter. The ultimate potential of ITSs nonetheless demands ultra-simple latencies and reliable methods for the analysis of data which incorporate a diverse mixture of data derived from and around the ITS internet in real-time. Edge-centred solutions should therefore be designed which are suited to the specific ITS ecosystem.
As a result, real-time data analysis methods that incorporate a diverse mix of data from and around the Internet of Things (IoT) need to be reliable and straightforward. The ITS ecosystem must therefore be taken into consideration when designing edge-centred solutions. At the level of smart sensors on the automobile, the item proposes an analytical structure for ITS data analysis. Numerous ITS-related disciplines can benefit from these devices’ robust image processing and data transmission capabilities.
The item proposes an ITS analytical structure wherein data are analyzed at the layer of smart sensors on the automobile. The technologies described provide ITS wide range of disciplines using robust image processing and data transmission capabilities on ITS devices.
Abbasi, M. et al. [26] suggested an effectual genetic algorithm for the vehicle on intelligent transportation systems (GA-ITS). In the cloud integration of digital carriage systems, the recommended method can significantly speed the corresponding TSP of many complex issues in vehicle routing. In addition to developing the service of autonomous vehicles in automotive clouds, the system offers route discovery. GA is a significant characteristic of a genetic algorithm capable of generating smart transport systems for solving problem optimization. The suggested method parallels GA with the construction of three coordinating kernels, each with several reliable, efficient GA operators. The approach developed has been studied to concurrent a GA-based TSP response with multi- and multi-core platforms.
Boukerche, A. et al. [27] identified artificial intelligence based on intelligent transportation systems (AI-ITS). Due to the increased road security and productivity needs in densely connected transport systems, the Intelligent Transportation System (ITS) garnered significant interest. In many ways, traffic forecasts could assist in the key portion of ITS, such as route routing. In this survey, two primary prediction approaches are concentrated, statistical and ML. The statistical models generally provide higher characteristic time; however, the stringent modelling approach limits flexibility, whereas the ML-based systems are more versatile.
Many aspects of ITS, such as route routing, could benefit from traffic forecasts. Statistical and machine learning (ML) are the two most prevalent methods of prediction examined in this study. Data-driven systems are more flexible than statistical models because they don’t have to adhere to a rigid model, whereas data-driven models tend to be faster.
Janssen, C. P., et al. [28] proposed a hidden Markov outline to capture human-machine communication in automated vehicles (MO-HM-AV). A foundation of the Markov Model will be created to formalize people’s ideas based on the mode where a semi-automated car operates. A machine that has been intended to function at a given loading stage can run at the prescribed level through several automating methods and may adjust its operation in time. A systemic and informal mode ambiguity characterization based on inaccurate user beliefs is provided within Hidden Markov Foundation. In many different approaches to vehicle automatics, the framework connects with principles and application, and thus it helps the planning and operation of automation machines and upcoming transportation systems.
Zengeler, N. et al. [29] introduced hand gesture recognition in automotive human-machine interaction (HG-HM). Machine Learning addresses the detection of hand gestures using temporal sensing depth information. They confirm that convolution genetic algorithms and a long-term selective memory give the most dependable findings concerning our results in this field. They examined numerous object detection fusing methodologies in a deep teaching approach and conducted user research to test the solution. The data have been gathered and publicized during the investigation in a new REHAP collection with over one million unique four examples of finger position.
Nalepka, P. et al. [30] identified human-machine interaction in the dynamical task (HM-DT). Human-machine interaction (HMI) properly training people to new economic encounters hinges on synthetic entities’ capacity to react naturally to human co-actors like humans. One technique to accomplish efficient HMI is to construct a modelling approach using dynamic motor primitives (DMP’s), giving a solvable control scheme for computerized agents and not capturing superior human intelligence’s behavioural dynamics.
Using a modelling approach based on dynamic motor primitives (DMPs) is one way to achieve effective HMI, which gives computerized agents a solvable control scheme but does not capture the behavioural dynamics of superior human intelligence.
However, prior research has shown how DMPs succeed in capturing the dynamics of human-like least good one-acting motions.
Using dynamic motor primitives (DMP’s), a modelling approach for efficient HMI can be constructed, which gives a solvable control scheme for computerized agents but does not capture the behavioural dynamics of superior human intelligence. DMPs, on the other hand, have been shown to capture the dynamics of human-like one-acting movements. It was also found that human dyads function similarly to those made up of an individual and an artificial entity.
Moreover, the data showed: that the function of human dyads is comparable to those consisting of a person and the synthetic entity.
The papers’ background research based on the human-machine interaction of intelligent transportation systems is done on current systems. The main existing intelligent transport systemsare IUM-ITO, DL-MAITS, GA-ITS, AI-ITS, MO-HM-AV, HG-HM, and HM-DT. By evaluating the research based on the investigation, the proposed method of EVHIF offers the best result on transportation.
3 Energy Vehicle with a Human Interaction Framework on the Intelligent Transportation System
Typical control structures are metropolitan transportation networks and how investigation findings of the research are complicated processes. Science in intelligence can fix the challenges of transport information systems and controls, such as new modelling, testing, optimization, and objective manner has become a widespread issue. EVHIF is based on an interaction technique between humanity and machinery that enhances existing traffic simulation with an organization increases and a wider variety and has progressively increased competence in research and implementations. The approach to human-machine interaction can be stated as three main steps: first, integrating technical, sociological, cognitive, and environmental variables as a whole and the synthesis of mathematical frameworks. Among them, the intelligent transportation system handles the design challenge for complicated processes; secondly, by conducting out computer tests on the intelligence system in normal and abnormal situations, the interconnections and development norms of the components of the entire program. Third, the connectivity of the intelligent design with the whole program of EVHIF, simultaneous implementation of the two kinds of processes by comparison and analysis, the reference prediction of current scenarios, and the adaptations of the techniques of coordination to monitor in different schemes appropriately.
| (1) |
Equation (1) gives the transportation process of , to start the transport mechanism using EVHIF. is the source location to get started and is the destination to travel. indicates the user’s location where gives the travelling process to the target. is the static behaviour of the vehicle which is no moving and is the convention process of the source station.
| (2) |
As inferred from Equation (2), the source location and the destination location system, where is the event evaluation, is to determine the traffic over the source way of the stage in EVHIF. is used for the starting position state to destination. is the source location or destination to static behaviour of vehicle without traffic.
Equation (2) shows that the EVHIF stage’s source and destination locations, where q denotes the event evaluation, are used to calculate , the amount of traffic on the stage’s source route. When moving from one position to another, the mod is employed. Static behaviour of a vehicle without traffic has as its source or destination the location where .
| (3) |
Equation (3) illustrates to eliminate the traffic events for stress-free travelling. is the matrix form to identify the length of the traffic state and vehicles. is the decision function to know the traffic detection in EVHIF, and is the time-lapse to locate the model. is the managing factor to travel, and is the finding sector of the distraction to the optimization condition. is the function of maximum distance finding to the distraction.
Thus, the human-machine interaction framework is essential for the transportation system for communicating with the design for travelling to the destination. It makes the user a perfect sense to interact with traffic-free roads and restricts disasters.
3.1 Human-Machine Interaction System
A new concept is suggested based on the EVHIF methodology: a human-machine interaction management and control system integrating the current transport system with intelligent transport systems. Experiments on transportation can be performed for intelligent transportation systems for the hardware on the circuit system and generic external interfaces, which enable genuine equipment to interact with the synthetic software. If the test is done in electronics loop mode, actual devices can be integrated into the simulated transportation system, such as signal controllers and automobile detectors. In this method, the physical sensors may access the flow characteristics of the synthetic road network, and the current controls can transmit directives into the intelligent transport system and change the artificial traffic signals to affect its running state, conversely.
Modern information and communication technology (ICT) combined with transportation and traffic management systems (TMS) is referred to as “intelligent transportation systems” (ITS). The goal of ITS is to make transportation networks safer, more efficient, and more environmentally friendly while also reducing traffic congestion and improving the driving experience for passengers. An ITS has a total of nine integrated parts. These elements are traffic signal monitoring, highway administration, digital fare collection, electronic toll payment, incident investigation, traveller information services, emergency management services, and railway grade crossing safety.
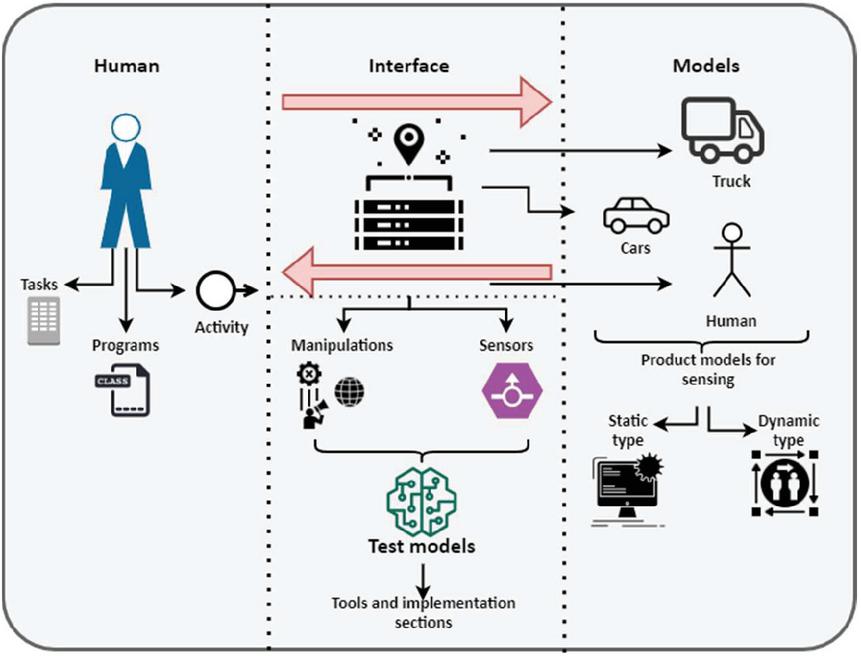
Figure 2 Human-machine interaction system.
Figure 2 illustrates the human-machine interaction system for vehicle identification. The human/user in the vehicle drives the system using the EVHIF model. An interface of the interacting system is used in the vehicle for monitoring other automobiles or human or static models. The interface consists of manipulations and sensors that detect the model on the front. The test models and tools are used for the implementation process for manipulating the sensing devices. A voice-over interaction system gives the communication basis for connecting the user to the identified models.
Distortions and detectors detect the model next to the user. Test models and tools aid the development of sensing devices. A speech interface system serves as a bridge between the user and the models that have been identified. For example, sensors and other devices monitor traffic congestion caused by automobiles. On the other hand, static devices are steadfast fixtures that cannot be relocated.
Sensors and other devices sense and monitor models like cars, trucks, bikes, and other dynamic vehicles for traffic jams. The static devices are stable things that cannot move to another place. Therefore, static models like poles, posts, and houses cannot be transferred to free traffic jams.
| (4) |
Human-machine interaction is given in Equation (4) for the intelligent transportation system of . gives the simple transportation system connected, is the starting stage of source, and , is the next stage of the target location. is the element to eliminate the source location’s traffic, and is the element to stop the final location’s traffic. is the action-value function and is the network value function with location of both targets and is the managing vector to state the distraction.
| (5) |
Equation (5) set the values of the action-value function with the less network value function and is the action value with the time-lapse condition for the EVHIF system. is the source and target location on setting the optimization over the time-lapse.
| (6) |
Manipulation and sensor functions of vehicles are given in Equation (6). is the source of the first location, is the second source function, is the first target function, and is the second target function stage. is the additional constraint for the robust operation of the vehicle.
| (7) |
Equation (7) illustrates the human-machine interaction where is the first user to interact based on direction. is the elementary unit sector lying on the time laps and location of the user. is the position of the vehicle in the area, is the communication on source location to is the sector of the target section. is the elementary unit of position vehicle in the source location.
User interaction with the proposed system of EVHIF is illustrated in the above equations to manage the vehicle drive without distraction to the destination. In addition, the information will be engaged in cloud storage for future use.
Cloud storage allows you to store data and files in an offsite location that can be accessed via the open network or a dedicated private network connection. A third-party cloud provider is now in charge of the data you send offsite for archival purposes rather than you.
3.2 Process of a Voice-over Interaction System
Machine intelligence contributes to the security, hygiene, cleverness, and convenience of all tracking information in EVHIF. Intelligence may be used to transport services, cars, architecture, drivers, or users and how these interact. It promotes market dynamics, identifies dangers, simplifies transportation congestions, cuts production of greenhouse gases and air pollutants, generates and controls transport, and analyses trip requirement and passenger comportment. The EVHIF structure of the intelligent operates on the vehicle activity monitoring with the driver. Several transport methods use a quick and effective working environment to let the driver operate rapidly and move the target swiftly.
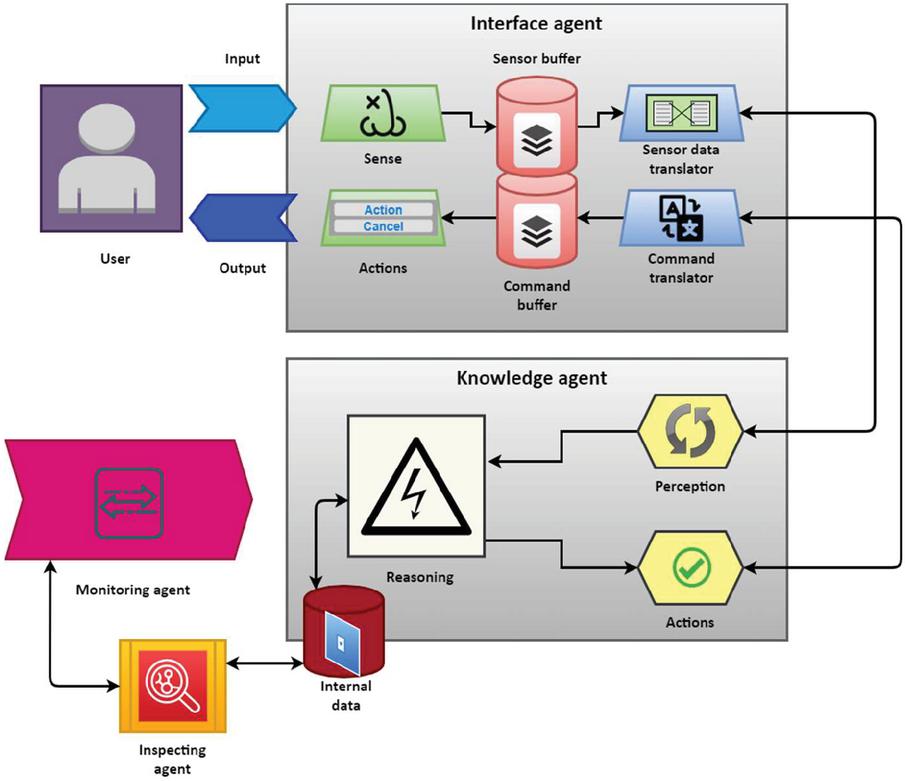
Figure 3 Process of voice-over interaction management system.
Figure 3 shows the EVHIF’s voice-over interaction system of the speech technique using input and output from the user to communicate. First, the user’s voice is sent to the sensing unit of the intelligent system for the communication process. After that, the voice is taken to a sensor buffer agent for translating it to machine-based language. Then they are buffered to the perception sector for knowing the key aspects of the user’s instruction. Finally, they are based on the senses of the human interface and moved to the reasoning part on managing internal data for storing in it.
The data from the internal storage is copied to the inspecting agent for the monitoring process of required values in EVHIF. Thus, they are inverted to the user’s voice and standardized back to the reasoning section of actions. The actions are majorly taking place to command translator of EVHIF after user language has been derived. Values from the command translator are moved to the command buffer to buff the user’s values and language. Then it is segmented as priority-based sections for user interaction. According to the user’s input, it is said to be the user’s output language. The internal representation of an intelligent system works based on such devices and software of EVHIF.
| (8) |
Equation (8) gives the voice-over interaction between the vehicle’s drivers to the intelligent system of EVHIF. is the first user communicating to the device for a way to the location and traffic-free roads. is the end-user destination, to the function of maximum distance multiplication. offers the distance to the target section with the extended area and is the first user voice-over to the device and sensors. is the single driver to the destination factor using the user’s voice.
| (9) |
The second user interaction is given by the Equation (9) and is the end-user interaction destination of the second driver. sections the maximum distance covered over the target solution for enclosing the distance in a long area . gives the second user interaction to the end-user target.
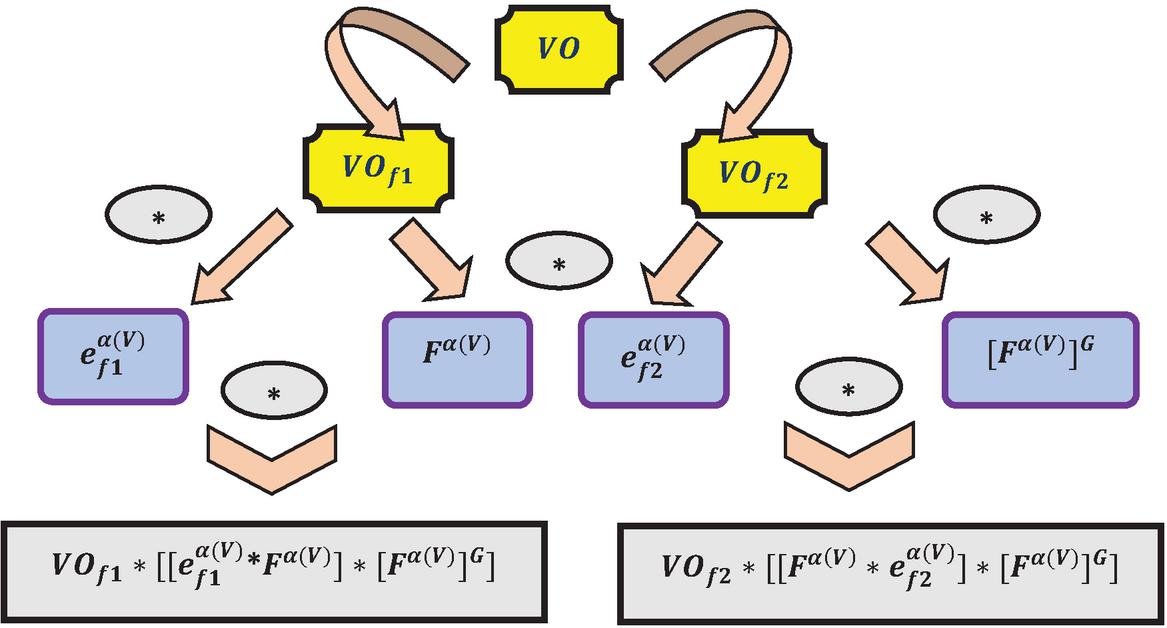
Figure 4 Voice-over interaction parameters.
Figure 4 illustrates the EVHIF’s voice-over interaction parameters with the relationship of Equations (8) and (9). Equation (8) gives the first user’s communication to the destination way, and Equation (9) provides the second user’s connection with devices for the end location without any traffic issues. In addition, these equations offer the time-lapse over the travelling segment from the user location to the needed section of the location.
| (10) |
Equation (10) gives the voice-over interaction framework of EVHIF to the human-machine interaction system. The integration of these two methods forms the emerged system of EVHIF to make it for user convenience. is the adding section of two methods with the time-lapse of to the first user and to the second user.
Equation (10) provides the system for human-machine interaction with the EVHIF voice-over interaction framework. The EVHIF system was created by integrating these two methods to make it more user-friendly. is a method that combines two methods, giving the first user a time-lapse of and the second user a time-lapse of G2.
| (11) |
Equation (11) gives the decision making factor , where is the decision-making sector to the set of statements for judgmental activities. is the angle based on the length of the vehicle, indicates the length, which is the location of the user and is the overall magnetic sector to the direction of angles of the automobile. The maximization of the summation values gives the more accurate distance from the driving vehicle to the gap of another vehicle. The time-lapse of is from the to some loops over the model vector. is the action-value function to the network value function of the target location.
| (12) |
Equation (12) offers the complete solution to the static language program section called is the increasing time-lapse of data to the static behaviour of and maximizing the value to the program’s directions to the buffer connection called . Thus, the decreasing value of static language transferring the buffered data to the overall user communication. is the increasing value of direction with two angles to determine the static language program.
The Voice-over interaction framework of EVHIF is used to engage the system with the user’s voice statement to know the location way. The comments will undergo the buffering process for modifying the program processing to the system understanding. Therefore, it makes sense to understand the words to change their work according to those wordings.
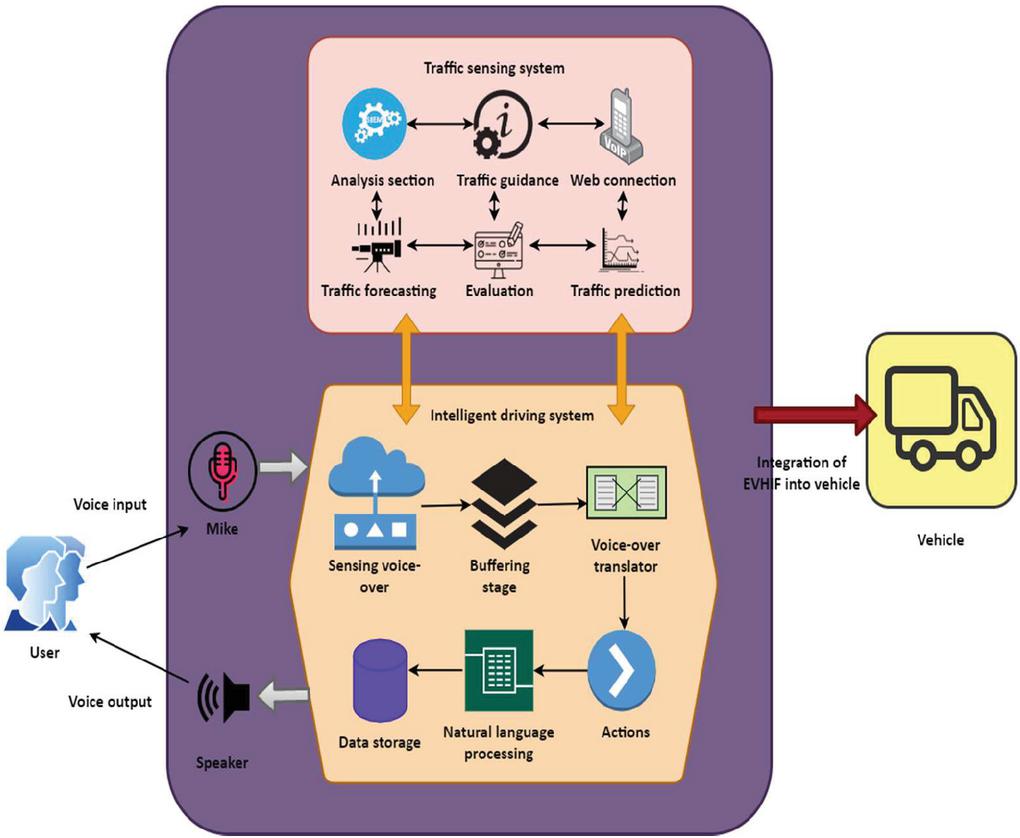
Figure 5 Energy vehicle with a human interaction framework.
3.3 Energy Vehicle with a Human Interaction Framework on the Transportation System
Figure 5 gives the complete architecture of the EVHIF as the traffic control system is the main reason to include it. There are two parts to the traffic service management system: Traffic and intelligent control systems are generally dependent on traffic systems with judgment procedures, variance analysis, and improvement of controls, traffic forecasts, counselling, and process assessment.
It is done starting with an investment feasibility analysis, and traffic forecasting is an essential aspect of the planning process for road facilities. It is necessary to consider several interrelated aspects when determining transportation and car distribution in a given section. The International Telecommunication Union (ITU) suggests that a network traffic analyst conduct measurements for the busiest hour of every day for a year to ascertain the normal reference traffic for a network. That four quarter hours in which traffic intensity is highest is described as the busiest hour.
It is the underlying predictive analytics procedure that includes and evaluates traffic details. The end-user portion consists of the social operations of the internet and network-based measures, the engagement architecture with interfaces, and the automobile’s advice.
3.3.1 Voice communication
The following residential division shows traffic data transmission from users to cloud technologies for equipment convenience. After buffered voice has been sent to the automobile, the vocabulary is coded to communicate with required equipment with a static language program. Such information will go to the path for enabling the interconnectivity information and customer support network.
The transmitter buffer keeps the encoder’s output rate constant. Sending a message that tells a change coder to lower the outcome from the compression if the buffer fills up quicker than the transmission rate A static language software is used to create the vocabulary to interact with the appropriate devices. Such data will lead to developing a consumer care and data interconnection network.
The voice-over of EVHIF calculates the investigation while linguistic pre-processing is parallel to and deducted. The following is the open space that says the optimum audio signals and the transition of impulses from origin to destination. For traffic assessment in an intelligent area, the vehicle is watched continually. Such measures monitor the use of buffering data, and the knowledge in the corresponding vehicle is therefore installed. Traffic must follow consecutively when a vehicle is travelling. The information of EVHIF will be obtained from the traffic prediction, and traffic instruction gathered in the analysis report, such that optimization is controlled. After the optimization procedure, the data are transferred to the synthetic interaction space in which the conductor’s voice is linked to the target, and a network model is activated.
The traffic control system of EVHIF installs geolocation to observe the site of the vehicle for additional updates and free traffic. The EVHIF method is integrated into disasters, stealing, etc., as the technology has real space at its disposal since a massive area of data collecting is required. A place for intelligent installation in the vehicle is a related aspect.
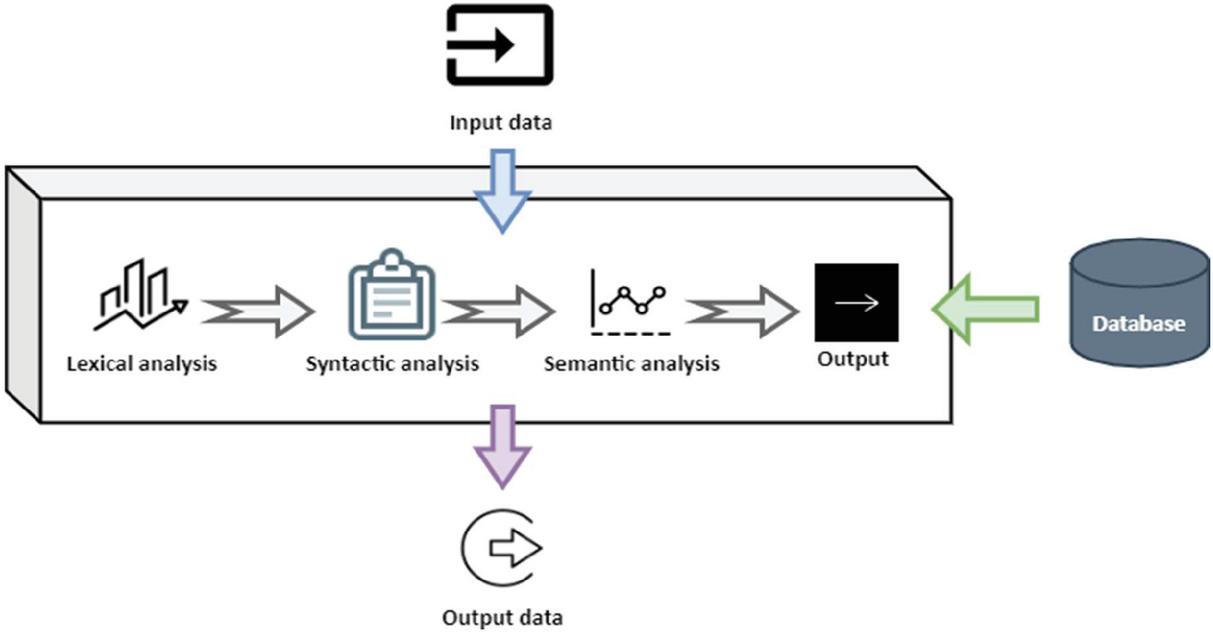
Figure 6 Static language program.
3.3.2 Static language program
Figure 6 gives the static language program, which is one of the methods of EVHIF for user communication. The program for static language refers to an intelligent way of communicating with users, which a machine can read. However, natural language comprehension is necessary for intelligence systems such as a computer to behave as directed, hearing decisions, and adopt a dialogue related to an intelligent medical system.
The initial step of the compiler, or scanner, is lexical analysis. Tokens are used to represent the high-level input programme. The Predetermined, finite Automata can be used to implement Lexical Analysis. The tokens are submitted to the parser for syntactic analysis in the output. Software developers can write instructions in particular programming languages using language translators. The language translator translates these commands into machine code. These machine code instructions are subsequently read and executed by the computer system
Lexical analysis
The initial phase of a translator is a linguistic analysis used in EVHIF. It accepts language scripts from the user documented in phrases and transforms them into encryption keys. This phase takes the input into it for traversing it to the next part of the analysis.
Syntactic analysis
The second phase of the static language program is syntactic analyses or parsing or syntax analysis in EVHIF. The objective of this stage is to derive significance accurately or use the text for dictionary meanings. The text verifies its importance concerning the basic grammatical rules in syntactic assessment.
Semantic analysis
Semantic analysis in EVHIF looks after the token arrangement of wordings. It notes the sequence of phrases from the voice-over of the user to communicate. This communication helps in transferring input and required output data to the user.
Output data
Output is the data of the voice section that provides the required modification to the user to drive perfectly. It can also be used in traffic regulation and guidance for user convenience. These data will be added to the database for future use and can track a sense of EVHIF.
| (13) |
Equation (13) gives a new parameter of , which is voice-over interaction analysis of with static language program. is the error rate control to the user’s source location to the target location . The static vector space through linear transformation can be written as , and is the analysis section of the input data to the programming factor. is the input data or voice from the user to the analysis section.
| (14) |
Equation (14) gives the vector sectors to sequence pressure of , and is the initial condition of a travelling vehicle to the . The final condition of the travelling vehicle in transportation of EVHIF.
| (15) |
Equation (15) provides the accuracy level ratio of the EVHIF system called with the time-lapse of . offers the average annual increase in transportation system by region, and is the prediction analysis over situations with the differential period. The functions of error rate, the average annual transportation rate, and accuracy functions are determined using the parameters mentioned above using historical methods. Thus, the equation shows the complete transfer of data to the voice-over interaction framework to communicate, and the derivation implements the intelligent monitoring system of vehicle transportation.
Finally, the proposed design of EVHIF is analyzed sequentially for the required output of data collection and transmission to an intelligent system. EVHIF is performed, predicted, and stepped into a better-analyzed method than other existing methods.
4 Results and Discussion
The focus on EVHIF is becoming ever more beneficial to travel where individuals can lessen road accidents and congestion. As the geolocation is activated, users can easily and conveniently move to the objective. Data sets are used to analyze the place and identify certain directions from a distance. Datasets are being used to generate and calculate the results for the analytical section to the knowledge provided by users. The following is the description of the datasets:
Table 1 Dataset
| S. No | Data | Description |
| 1 | Number of locations | 2,4,6,…,50 |
| 2 | User’s location | 20,40,…,50 |
| 3 | Minimum number of samples used | 50 |
| 4 | Trained samples | 25% of dataset records |
| 5 | Tested samples | 75% of dataset records |
The data sets supplied in Table 1 above illustrate the number of user sites and expected location numbers for retraining the sets. For model evaluation for the suggested EVHIF architecture, the current systems IUM-ITO, DL-MAITS, GA-ITS, AI-ITS, MO-HM-AV, HG-HM, and HM-DT are augmented. The following tables are employed in the proposed model: traffic-related problem analysis, traffic-related situational data analysis, annual transportation rate, mistake controlling rates, and precision level rates. Various investigations and analyses can be concluded utilizing the following analyses depending on transportation conditions and local surveillance.
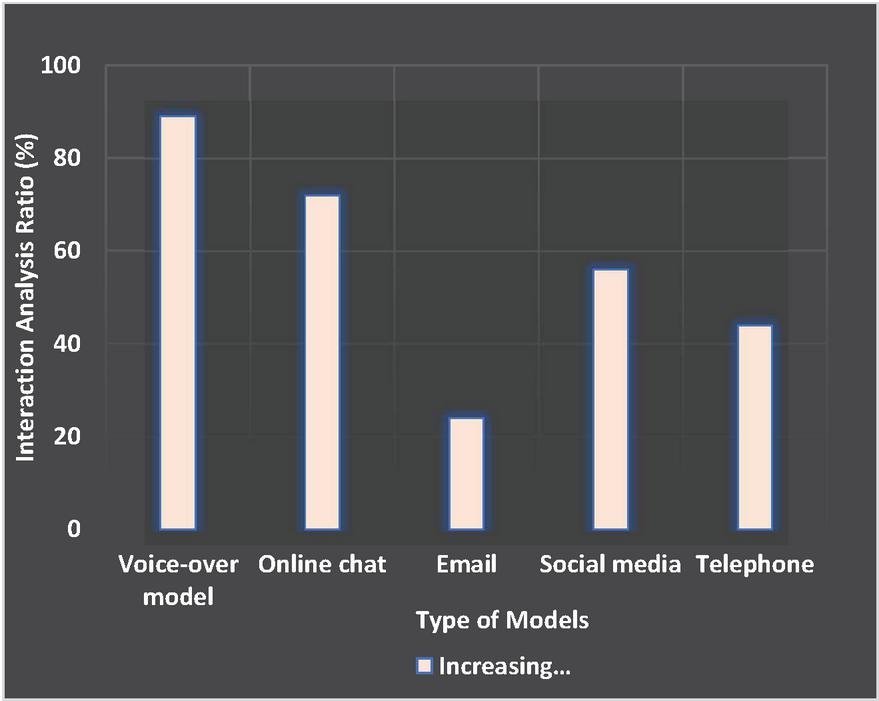
Figure 7 Voice-over interaction analysis.
4.1 Voice-over Interaction Analysis
Figure 7 gives the voice-over interaction framework model to analyze the wavelength prediction with different types for communication given in Equation (13). The voice-over ratio has more wavelength than other online chats, email, social media, and telephone. Online chat is somewhat higher than social media, which is increasingly used these days.
Connecting with customers over the phone is made possible by voice process assistance. Therefore to communicate with a customer, a computer chat option is used. Customer service and problem-solving can be provided through both approaches. When addressing a problem, direct touch and two-way conversation are still essential. Waiting in line or being put on hold can quickly turn into customer irritation rather than a feeling of success. When it comes to reading emotions in written communication, as we previously stated, it might be challenging. Chat minimizes the cost of phone bills and repeatedly proves that it can save the time it takes the agent to answer customer issues. Agents may now handle many conversations at once, which reduces the need to recruit additional intermediaries for the organization.
Social media is based on applications to interact with people for transferring and receiving messages. This communication is a must over technology as trends increase because online works are more powerful. The email chats send important confidential details and professional content over the wireless framework. The telephone is the traditional communication factor, which is developed using a hardware unit. Thus, the comparison between these facilities gives the best result on the voice-over sector as it is wireless. Therefore, the Voice-over interaction framework is higher when associated with all other sectors to use in EVHIF.
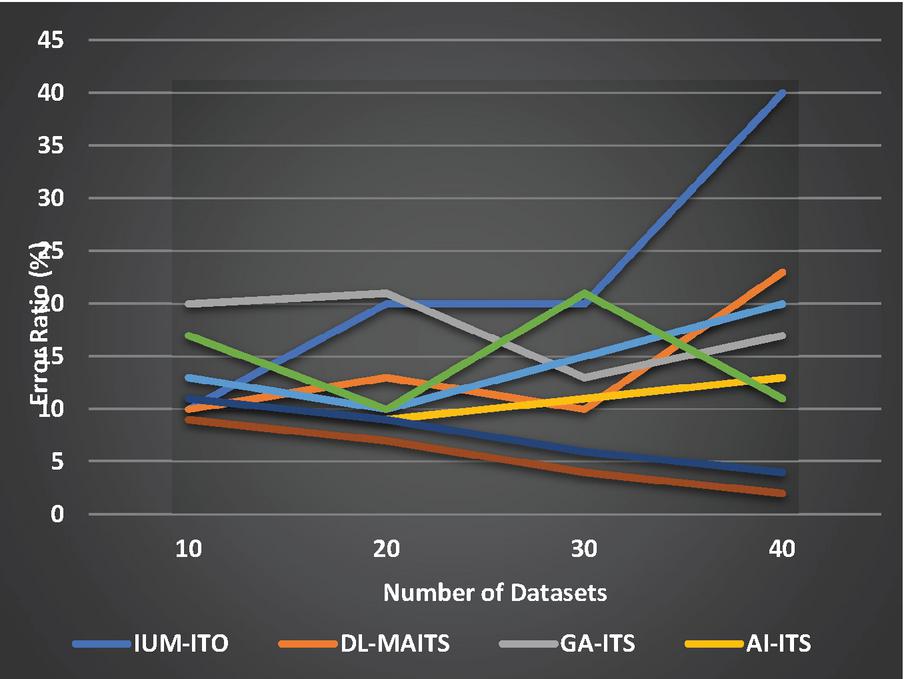
Figure 8 Error rate determination.
4.2 Error Control Rate
Figure 8 shows the Error rate determination of the proposed system EVHIF. The existing IUM-ITO, DL-MAITS, GA-ITS, AI-ITS, MO-HM-AV, HG-HM, and HM-DT methods are included in the above graph to compare the value changes the launched system. The error control function and the error rate is occurred in the previously mentioned equation of (13) and found with many sequential equations and verified. The error rate is happened in many states of execution to know the specific error condition. As the existing and proposed systems are mingled to simplify, the percentage values for showing the error rate of the launched method are less compared to other systems.
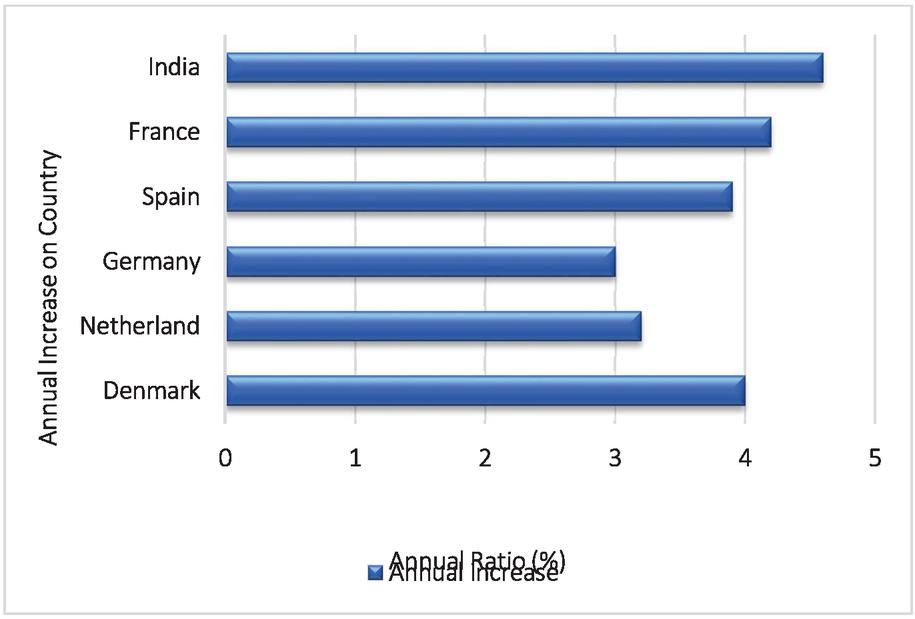
Figure 9 Average annual increase in transportation.
4.3 The Average Annual Increase in Transportation System by Region
Figure 9 shows the average annual increase in transportation between countries based on the intelligent transportation system given in Equation (15). Many nations work on developing transportation facilities for travelling from place to place. It should decrease the pollution over the region for less disease and lower the pollution for national development. It is a mechanism that can support growth over time, and it offers the same, if not more, potential to succeed to the future generation as the current generation. Based on the survey, India has more transportation facilities and is a travelling place. Denmark is the following country which has increased state of a vehicle travelling that has 40%. France, Netherlands, and Spain give decreasing vehicle transportation service, and the lesser survey is given on Germany as the country sustains less transportation. Due to such less usage of vehicles, the intelligent transportation of EVHIF can be introduced for user convenience. The annual ratio is the base aspect that shows the country’s gradual working on vehicle transport to increase the production on economic development.
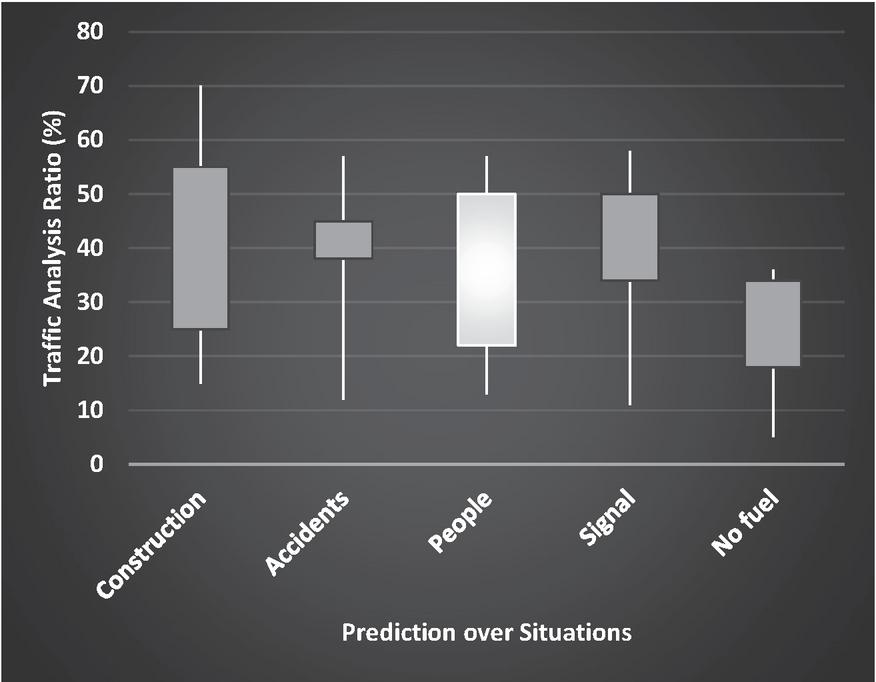
Figure 10 Traffic prediction analysis over situations.
4.4 Traffic Prediction Analysis Over Situations
Figure 10 shows the identification analysis based on traffic issues based on situationsin Equation (15). From the analysis of the above states, there are six parameters of data like no fuel, accidents, constructions, people walkthrough, signals which determine more traffic. Constructions-based traffic is more than 55% when compared to other situations. Accidents are less with construction, people, signal, and no fuel states. They will vary on the region-based analysis as the survey differs day-to-day. The above-listed issues are less than real-time situations, as traffic jams have many problems. As listed through the cases, the proposed system of EVHIF gives more accurate sensing of the situation-based issue is determined.
There are fewer accidents when there are people, signals, and no fuel. Since the survey is conducted daily, results will vary by region. There are many more issues with traffic jams than the ones listed above, so they are minor in real-time situations. Yes, the EVHIF system determines a more accurate sense of the situation.
Table 2 Accuracy rate determination
| Number | ||||||||
| of | ||||||||
| Datasets | IUM-ITO | DL-MAITS | GA-ITS | AI-ITS | MO-HM-AV | HG-HM | HM-DT | EVHIF |
| 10 | 19.78 | 21.21 | 24.54 | 18.76 | 28.76 | 32.19 | 24.10 | 32.25 |
| 20 | 21.78 | 12.65 | 45.36 | 73.56 | 32.45 | 40.88 | 35.23 | 36.70 |
| 30 | 18.65 | 26.33 | 53.66 | 48.23 | 46.76 | 49.65 | 55.13 | 44.75 |
| 40 | 32.15 | 18.98 | 35.97 | 53.26 | 30.12 | 58.89 | 78.43 | 79.47 |
| 50 | 28.56 | 36.78 | 61.78 | 31.03 | 51.34 | 53.44 | 77.11 | 78.00 |
| 60 | 45.89 | 31.87 | 49.74 | 45.69 | 67.87 | 69.45 | 74.20 | 79.76 |
| 70 | 38.27 | 56.21 | 71.23 | 77.89 | 50.65 | 79.67 | 87.15 | 90.29 |
| 80 | 68.26 | 49.21 | 31.43 | 69.31 | 70.12 | 77.01 | 97.24 | 98.56 |
4.5 Accuracy Rate Analysis
Table 2 shows the accuracy rate based on the ratio level mentioned in Equation (15). The voice-over and capturing signal are improved from other algorithms and processes like IUM-ITO, DL-MAITS GA-ITS, AI-ITS, MO-HM-AV, HG-HM, and HM-DT. These methods have an intelligent system to convert the voice signals into a transparent version for audio and speaker. It uses a static language program to convert the user language to a machine-readable program. Instead, the proposed design of EVHIF listens to the interruptions accurately according to the data fed into it and recognizes the voice to respond accurately. The accuracy level of this launched system has increased certainty of values and less error ratio with the number of datasets given to it. The result from the table enhances the clear voice-over for requests and responses to the user. Thus, the accuracy rate predicted from the proposed system is 98.56%.
Discussion is based on many literature surveys, and thus the performance of the intelligent transportation system of EVHIF is accomplished. The need for data transfer from the user to the computing system is encountered using many equations. The created graphs and data are entirely enhanced compared to existing methods of records. Thus, determining the datasets used in EVHIF, comparison stage of processes, traffic prediction over situations, the average annual increase in transportation, accuracy rate, and error control rate is successfully implemented in EVHIF for better growth.
5 Conclusion
Intelligence transportation systems play an essential part in technology upgrades since consumers require autonomous, stress-free highways for journeys. Many advancing approaches have emerged because of their demand for these resources. Instead, the suggested EVHIF system has enhanced cloud services capabilities, machine intelligence, traffic control data, and connectivity to include numerous drawbacks. The system is mainly motivated by receiving traffic statistics in towns and cities as it is crucial for monitoring this information. People’s ordinary lives may be affected by various disasters, robberies, and misbehaving. For security purposes for individuals in an urgent situation, the gadget and technology have been incorporated into safety administration: superior officers can be contacted easily through the voice section. The driver/user using the automobile should grasp the voice-over interaction framework of EVHIF since it recognizes the user’s speech and makes it possible to navigate the location.
The supplied input is done on the equations of the speech over architecture and the user speech signal. The user speech is distinct from the accessible method of the device. Thus the voice conversion uses the static learning program of EVHIF for enabling communication. Therefore, the replay from the voice-over framework is released based on the user’s voice-over. In situations, the intelligence technology employed recognizes and evaluates the safety platform actions, and upgrades are produced. Finally, this gadget and application will be set up and installed in the vehicle concerned. This combination of technology will be straightforward to execute and advance to the next level. The assessment of the simulations is better accomplished than other available approaches and hence has been checked accurately at 98.56%.
Acknowledgement
Materials for Materials and Intelligent Science and Technology in Tianjin: Research on Automobile Intelligent Driving Assistant Strategy and Controller Platform Based on Traffic Accident Scene (17ZXRGGX00070).
References
[1] Zhang, H., and Lu, X. (2020). Vehicle communication network in intelligent transportation system based on internet of things. Computer Communications, 160, 799–806.
[2] Mahmoudi, R., Emrouznejad, A., Shetab-Boushehri, S. N., and Hejazi, S. R. (2020). The origins, development, and future directions of data envelopment analysis approach in transportation systems. Socio-Economic Planning Sciences, 69, 100672.
[3] Liu, B. H., and Nguyen, N. T. (2014, August). An efficient method for sweep coverage with the minimum mobile sensor. In 2014 Tenth International Conference on Intelligent Information Hiding and Multimedia Signal Processing (pp. 289–292). IEEE.
[4] Liu, B. H., Pham, V. T., and Nguyen, N. T. (2015, September). A virtual backbone construction heuristic for maximizing the lifetime of dual-radio wireless sensor networks. In 2015 International Conference on Intelligent Information Hiding and Multimedia Signal Processing (IIH-MSP) (pp. 64–67). IEEE.
[5] Le, N. T., Wang, J. W., Wang, C. C., and Nguyen, T. N. (2019). Automatic defect inspection for coated eyeglass based on symmetrized energy analysis of color channels. Symmetry, 11(12), 1518.
[6] Usman, N., Usman, S., Khan, F., Jan, M. A., Sajid, A., Alazab, M., and Watters, P. (2021). Intelligent dynamic malware detection using machine learning in IP reputation for forensics data analytics. Future Generation Computer Systems, 118, 124–141.
[7] Chen, J., Ramanathan, L., and Alazab, M. (2021). Holistic, big data integrated artificial intelligent modeling to improve privacy and security in data management of smart cities. Microprocessors and Microsystems, 81, 103722.
[8] Albahri, O. S., Zaidan, A. A., Salih, M. M., Zaidan, B. B., Khatari, M. A., Ahmed, M. A., … and Alazab, M. (2021). Multidimensional benchmarking of the active queue management methods of network congestion control based on an extension of the fuzzy decision by opinion score method. International Journal of Intelligent Systems, 36(2), 796–831.
[9] Appathurai, A., Manogaran, G., and Chilamkurti, N. (2019). Trusted FPGA-based transport traffic inject, impersonate (I2) attacks beaconing on the Internet of Vehicles. IET Networks, 8(3), 169–178.
[10] Manogaran, G., Balasubramanian, V., Rawal, B. S., Saravanan, V., Montenegro-Marin, C. E., Ramachandran, V., and Kumar, P. M. (2020). Multi-Variate Data Fusion Technique for Reducing Sensor Errors in Intelligent Transportation Systems. IEEE Sensors Journal.
[11] Yin, X., Li, J., Kadry, S. N., and Sanz-Prieto, I. (2021). Artificial intelligence assisted intelligent planning framework for environmental restoration of terrestrial ecosystems. Environmental Impact Assessment Review, 86, 106493.
[12] Bi, D., Kadry, S., and Kumar, P. M. (2020). Internet of things assisted public security management platform for urban transportation using hybridized cryptographic-integrated steganography. IET Intelligent Transport Systems, 14(11), 1497–1506.
[13] Veningston, K., Kadry, S., Kalash, H. S., Balamurugan, B., and Sathiyaraj, R. (2020). Intelligent social network-based data modeling for improving health care. Health and Technology, 10(1), 321–332.
[14] Chen, W. H., Lin, W. I., Chang, S. H., and Mak, L. C. (2015). Exploring relationships between the physiological and psychological condition of seniors and their mobility and social activity. Transportation research record, 2537(1), 103–110.
[15] Chen, W. H., Chang, S. H., Kao, K. C., Lin, S. Y., and Lin, W. I. (2009). Design and evaluation of bus information at bus stops and printed information brochures for the elderly. Transportation Planning Journal, 38(4), 355–380.
[16] Chang, B., Pei, H. M., and Chang, J. R. (2011). Using the Rough Set Theory to Investigate the Building Facilities for the Performing Arts from the Performer’s Perspectives. In Intelligent Decision Technologies (pp. 647–657). Springer, Berlin, Heidelberg.
[17] Gupta, D., Rani, S., Ahmed, S. H., Garg, S., Piran, M. J., and Alrashoud, M. (2021). ICN-Based Enhanced Cooperative Caching for Multimedia Streaming in Resource-Constrained Vehicular Environment. IEEE Transactions on Intelligent Transportation Systems.
[18] Zhou, B., Liu, A., Lau, V., Wen, J., Mumtaz, S., Bashir, A. K., and Ahmed, S. H. (2020). Performance limits of visible light-based positioning for Internet-of-vehicles: Time-domain localization cooperation gain. IEEE Transactions on Intelligent Transportation Systems.
[19] Abbasi, M., Rafiee, M., Khosravi, M. R., Jolfaei, A., Menon, V. G., and Koushyar, J. M. (2020). An efficient parallel genetic algorithm solution for vehicle routing problems in cloud implementation of intelligent transportation systems. Journal of Cloud Computing, 9(1), 6.
[20] Jolfaei, A., and Kant, K. (2019, June). Privacy and security of connected vehicles in the intelligent transportation system. In 2019 49th Annual IEEE/IFIP International Conference on Dependable Systems and Networks–Supplemental Volume (DSN-S) (pp. 9–10). IEEE.
[21] Pathak, D. K., Thakur, L. S., and Rahman, S. (2019). Performance evaluation framework for sustainable freight transportation systems. International Journal of Production Research, 57(19), 6202–6222.
[22] Brincat, A. A., Pacifici, F., Martinaglia, S., and Mazzola, F. (2019, April). The internet of things for intelligent transportation systems in real smart city scenarios. In 2019 IEEE 5th World Forum on Internet of Things (WF-IoT) (pp. 128–132). IEEE.
[23] Khattak, Z. H., Magalotti, M. J., and Fontaine, M. D. (2020). Operational performance evaluation of adaptive traffic control systems: A Bayesian modeling approach using real-world GPS and private sector PROBE data. Journal of Intelligent Transportation Systems, 24(2), 156–170.
[24] Sobral, T., Galvão, T., and Borges, J. (2019). Visualization of urban mobility data from intelligent transportation systems. Sensors, 19(2), 332.
[25] Ferdowsi, A., Challita, U., and Saad, W. (2019). Deep learning for reliable mobile edge analytics in intelligent transportation systems: An overview. ieee vehicular technology magazine, 14(1), 62–70.
[26] Abbasi, M., Rafiee, M., Khosravi, M. R., Jolfaei, A., Menon, V. G., and Koushyar, J. M. (2020). An efficient parallel genetic algorithm solution for vehicle routing problems in cloud implementation of intelligent transportation systems. Journal of cloud Computing, 9(1), 6.
[27] Boukerche, A., Tao, Y., and Sun, P. (2020). Artificial intelligence-based vehicular traffic flow prediction methods for supporting intelligent transportation systems. Computer Networks, 182, 107484.
[28] Janssen, C. P., Boyle, L. N., Kun, A. L., Ju, W., and Chuang, L. L. (2019). A hidden markov framework to capture human-machine interaction in automated vehicles. International Journal of Human-Computer Interaction, 35(11), 947–955.
[29] Zengeler, N., Kopinski, T., and Handmann, U. (2019). Hand gesture recognition in automotive human-machine interaction using depth cameras. Sensors, 19(1), 59.
[30] Nalepka, P., Lamb, M., Kallen, R. W., Shockley, K., Chemero, A., Saltzman, E., and Richardson, M. J. (2019). Human social motor solutions for human-machine interaction in dynamical task contexts. Proceedings of the National Academy of Sciences, 116(4), 1437–1446.
[31] Manogaran, G., Rawal, B. S., Saravanan, V., Kumar, P. M., Martínez, O. S., Crespo, R. G., … and Krishnamoorthy, S. (2020). Blockchain based integrated security measure for reliable service delegation in 6G communication environment. Computer Communications, 161, 248–256.
[32] Zhu, S., Saravanan, V., and Muthu, B. (2020). Achieving data security and privacy across healthcare applications using cyber security mechanisms. The Electronic Library.
[33] Baskar, S., Dhulipala, V. S., Shakeel, P. M., Sridhar, K. P., and Kumar, R. (2020). Hybrid fuzzy based spearman rank correlation for cranial nerve palsy detection in MIoT environment. Health and Technology, 10(1), 259–270.
Biography
Peng Zhang, born in August 1989, male, doctoral student. In July 2011, he majored in automotive maintenance engineering education from Tianjin University of Technology and Education and received a bachelor’s degree; in June 2018, he graduated from Tianjin University of Technology and Education with a master’s degree in mechanical engineering. He is currently a doctoral student in Mechanical Design and Manufacturing Education at Tianjin University of Technology and Education.

Zhiwei Guan, born in March 1970, male, professor, doctor of engineering. He is a doctoral supervisor at Tianjin University of Technology and Education, and is currently a professor at Tianjin Sino-German University of Applied Sciences, whose research direction is intelligent transportation technology.

Jingjing Sun, born in April 1986, female, lecturer. In July 2011, Tianjin University of Technology and Education majored in applied electronic technology education and received a bachelor’s degree. He is currently working in the School of Electronic Information Engineering, Hebi Polytechnic.
Strategic Planning for Energy and the Environment, Vol. 40_4, 331–362.
doi: 10.13052/spee1048-5236.4042
© 2022 River Publishers